Im ple me ntación de controladore s difusos con m
Anuncio

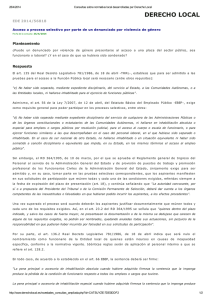
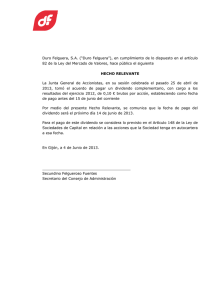
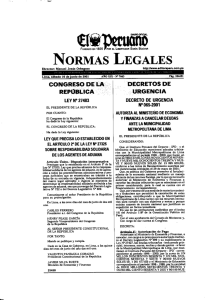
Im pl e m e ntación de control adore s difusos con m icrocontrol adore s Inge nie ro Fe rnando Pinil l os Doce nte Facul tad de Inge nie ría Program a Te cnol ogía e n El e ctrónica – Unim inuto INVENTUM IMPLEMENTACIÓN DE CO NTRO LADO R ES DIFUSO S CO N MICRO CO NTRO LADO RES 1. INTR O DUCCIÓN La te oría de conjuntos borroso e s una aproxim ación a l a form a de pe nsam ie nto h um ano e n l a m ane ra de de scribir l os obje tos y l a form a de e stos e n agruparse . Esto pe rm ite m ode l ar un suce so im pre ciso de m ane ra m ás e xacta q ue con l a sim pl e de scripción q ue nos otorga l a te oría de conjuntos cl ásica. La te oría de conjuntos borrosos tom a e n conside ración l a e xiste ncia de pre dicados vagos, e s de cir, pre dicados q ue al apl icarl os a cie rto Unive rso de l Discurso, l os e l e m e ntos de l Unive rso no q ue da com pl e tam e nte cl asificado com o “pe rte ne ce ” o com o “no pe rte ne ce ” a dich o pre dicado. Así por e je m pl o, si conside ram os l a variabl e l ingüística “Ve l ocidad” sobre l a cual h e m os de finim os un Unive rso de ldiscurso dado por e l conjunto de ve l ocidade s e ntre 0 y 1000 re vol ucione s por m inuto (rpm ) y e l subconjunto dado por e lpre dicado "rápido“, conform ado e ste por e l conjunto cl ásico de todas aq ue l l as ve l ocidade s e ntre 600 rpm y 1000 rpm , nue stro subconjunto nos indicaría q ue tanto una ve l ocidad de 600 rpm com o una de 1000 rpm pe rte ne ce n al conjunto “rápido” de igual m ane ra, aunq ue nosotros te ngam os una naturalincl inación a conside rar m ás rápido l as ve l ocidade s m ás al tas. La te oría de conjuntos borrosos pe rm ite dar cuanta de e stos pe cul iaridade s de l l e nguaje al de finir una función de pe rte ne ncia al pre dicado vago o variabl e l ingüística. Esta función indicará cual e s e l grado de pe rte ne ncia de un e l e m e nto cual q uie ra de l Unive rso de lDiscurso alpre dicado vago. En nue stro e je m pl o, pode m os de finir e l conjunto borroso “rápido” a partir de e lval or se m ántico de dich a e tiq ue ta y l a función de incl usión m ostrada e n l a figura 1. Si 1 re pre se nta pe rte ne ncia com pl e ta al conjunto borroso y 0 re pre se nta l a no pe rte ne ncia a dich o conjunto, l a función de incl usión indicaría q ue l a Figura 1 Función de incl usión de l pre dicado vago "rápido" pe rte ne ncia al conjunto borroso se da de m ane ra gradual con e l aum e nto de l a te m pe ratura. En e ste caso dire m os q ue e n 600 rpm no se pe rte ne ce alconjunto, q ue e n 1000 rpm se pe rte ne ce por com pl e to alconjunto, y q ue e n 800 rpm se pe rte ne ce e n un 50% al conjunto Nue stro l e nguaje e s rico e n e l uso de pre dicados vagos y sin e m bargo ve m os l im itado e lanál isis q ue nue stra tradición da a nue stro m odo de pe nsar cl aram e nte l ógico – l ingüístico, al tratam ie nto e spe cul ativo y anal ítico de l l e nguaje . La insuficie ncia de l al ógica cl ásica al re to q ue supone infe rir con al gún grado de ce rte z a a partir de e nunciados im pre cisos e s asum ido por [Z ade h 19 75] al e stabl e ce r l os fundam e ntos de l a te oría de conjuntos borrosos y e xtrapol ar l os val ore s de l a función de incl usión a nive l es l ógicos de lm ism o m odo q ue supone h ace rl o en l a l ógica cl ásica. Estam os e ntonce s ante e l nacim ie nto de una l ógica pol ival e nte q ue pl ante a un nue vo e nfoq ue al tratam ie nto de l l e nguaje y sus im pl icacione s e n e l pe nsam ie nto h um ano. Los siste m as de control borroso vie ne n a se r una de l as principal e s apl icacione s de l al ógica borrosa y pe rm ite n alinge nie ro de controlusar re gl as intuitivas ace ntuadas por l a vague dad de sus e nunciados y form ul ar e strate gias q ue pe rm itan e ncontrar e sfue rz os de control , de un m odo sim il ar a l os proce dim ie ntos se guidos por l os siste m as e xpe rtos pe ro supe rando l os inconve nie nte s de im pl e m e ntación q ue e stos supone n. CONTROLADORES Este artícul o re al iz a una re visión de l os fundam e ntos ne ce sarios para e l de sarrol l o de control adore s difusos e n probl e m as de control y propone e sq ue m as de im pl e m e ntación de l os control adore s e n siste m as de proce sam ie nto basados e n m icro control adore s. Se tom ará com o re fe re ncia de l os e je m pl os de código e l conjunto de instruccione s de l89 C52 2. CO NJUTO S BO RRO SO S De finire m os un conjunto borroso P com o l a tripl e ta dada por e lUnive rso de ldiscurso U, l a e tiq ue ta de l pre dicado vago P o variabl e l ingüística asociada alconjunto U, y l a función de incl usión de l os e l e m e ntos de U e n e lrango [0 1] <U, P, µ P> La igual dad de dos conjuntos borrosos P y Q q ue da dada por l a igual dad de sus funcione s de incl usión, e s de cir, Figura 2 Función de incl usión de lpre dicado vago "rápido" y su antónim o "l e nto" Los ope radore s sobre pre dicados vagos tam bién se pue de n de finir e n térm inos de funcione s de incl usión de conjuntos borrosos. Expre sione s com o “Muy rápido” o “Mas o m e nos rápido” de fine n nue vos conjuntos borrosos a partir de l conjunto borroso rápido. Estos ope radore s se l e s re conoce com o Conce ntración y Dil atación re spe ctivam e nte y q ue dan de finidos para un conjunto borroso P por Elcom pl e m e nto P´ de un conjunto borroso P q ue da de finido por y Elantónim o AntP de un conjunto borroso P se de fine com o El antónim o de P tie ne l as m ism as conside racione s se m ánticas q ue supone te ne r e l antónim o de un pre dicado vago. Por e je m pl o e l “Ant rápido”, q ue pode m os de nom inar l e nto, de fine l a función de incl usión m ostrada e n l a figura 2. INVENTUM Las funcione s m in( ) y m ax( ) son e n re al idad l as m ás re strictivas de una se rie de posibl es funcione s q ue cum pl en l as l e ye s de Morgan y a l as q ue se l e s conoce com o Norm as Triangul are s y Conorm as Triangul are s re spe ctivam e nte . Final m e nte dire m os q ue un conjunto borroso P pue de de finir un conjunto cl ásico conocido com o e lsoporte de P y q ue de notare m os com o sopP de finido por 3. LO GICA BO RRO SA La l ógica borrosa pe rm ite m ode l ar e lcál cul o con pre dicados vagos cual ificados de ve rdad asignando factore s de ce rte z a e ntre 0 y 1. Asocia l as funcione s de pe rte ne ncia q ue de fine n l os conjuntos borrosos a l os val ore s de ce rte z a y de riva nue vas funcione s de incl usión a partir de l as ope racione s e ntre dich os conjuntos pe rm itie ndo e ncontrar l a ce rte z a de nue vos conjuntos. A e sto se h a l l am ado R az onam ie nto Aproxim ado. Los ante ce de nte s de un raz onam ie nto e starán cada uno asociados a conjuntos borrosos dife re nte s, con unive rsos de l discursos e ve ntual m e nte dife re nte s, q ue conl l e van a una nue va función de incl usión. Conside re m os por e je m pl o l os pre dicados vagos P y Q sobre l os cual e s de se am os e stabl e ce r un cal cul o proposicional . Te ne m os e ntonce s un nue vo conjunto borroso R q ue e s una re l ación de finida por Re l ación e n e le spacio UxV q ue de notare m os com o µP- Q. Las re l acione s borrosas m ás inte re sante s son, por supue sto, l as re l acione s condicional e s donde tom an val or e xpre sione s de l l e nguaje com ún com o “Si x e s P e ntonce s y e s Q” donde se pone n de m anifie sto l a re l ación condicionale ntre P y Q. En e ste orde n de ide as e s posibl e de finir re l acione s borrosas para e stabl e ce r l a Conjunción, Disyunción, y de fe re nte s tipos de im pl icación e ntre l as q ue se de stacan e l Modus Pone n y e l Modus Tol e n. Pre se ntam os a continuación l as dife re nte s e xpre sione s para e l cal cul o de l as re l acione s borrosas CONTROLADORES CO NTRO LADO RES BO RRO SO S Un siste m a de controlautom ático e stá re pre se ntado por l os e l e m e ntos m ostrado e n l a figura 3 Figura 3 Diagram a de bl oq ue s de un siste m a de controlautom ático En l os proce sos industrial es l a se ñalcontrol ada pue de se r te m pe ratura, pre sión, nive l , posición, ve l ocidad, e tc. Nue stro inte rés e s garantiz ar q ue e sta variabl e pre se nte e stabil idad absol uta, e s de cir, q ue l os val ore s de e sta e stén confinados de ntro de cie rtos l ím ite s transcurrido e l tie m po donde tie ne n incide ncia l os fe nóm e nos transitorios. Elotro probl e m a q ue inte re sa e s l a e stabil idad re l ativa q ue supone probl e m as com o garantiz ar q ue l a variabl e control ada re sponda en l os tie m pos ade cuados dada una pe rturbación, q ue no pre se nte sobre picos m ás al l á de cie rtos um bral e s o q ue su re spue sta al disturbio no pre se nte oscil acione s. El obje tivo fundam e ntal de l control ador e s m ante ne r igual es l as se ñal e s de re fe re ncia y l a se ñal se nsada, o dich o de otro m odo, m ante ne r e n ce ro l a se ñalde e rror. A e sto se agre ga e l re sponde r de m ane ra rápida a l os cam bios de l e rror (de rivada de l e rror), o al e rror acum ul ado (inte gral de l e rror); l o ante rior supone l a form a m ás cl ásica de controlanál ogo: PID (proporcional , inte graly de rivativo). Un PID e n un l az o de controlcom o e lm ostrado en l a figura 3 pue de se r fácil m e nte im pl e m e ntado con Am pl ificadore s O pe racional e s, con proce dim ie ntos de dise ño cl aram e nte de finidos, pe ro sol o tie ne val ide z si nue stro proce so se m ode l a con e cuacione s dife re ncial es l ine al e s invariante s e n e ltie m po. Para e l9 0% de l as apl icacione s de controle sto re sul ta suficie nte , y e n caso de contar con pl antas no l ine al e s, e stas se podrán l ine al iz ar al re de dor de un punto de ope ración. Sin e m bargo no todos l os proce sos son suce ptibl es de dich os proce dim ie ntos. Elotro inconve nie nte q ue pre se nta un control PID cl ásico o e n ge ne ral , cual q uie r siste m a de com pe nsación im pl e m e ntado con am pl ificadore s ope racional e s, re sul ta e n l a dificul tad o im posibil idad de goz ar de l as ve ntajas de un siste m a digital : m andos se cue ncial e s, com unicacione s, visual iz ación, re gistro e stadístico, e tc. Esto se pue de re sol ve r im pl e m e ntando siste m as de control digital . Para e l l o re q ue rim os e stabl e ce r un pe riodo de m ue stre o, l o m ás grande posibl e pe ro garantiz ando e stabil idad e n l a pl anta. Durante cada m ue stre o l a pl anta va a e star e n l az o abie rto por l o cualre sul ta im pre scindibl e dim e nsionar corre ctam e nte e l tie m po de m ue stre o. Es típico fijar e lum bralm áxim o de e ste tie m po com o 20 ve ce s 1/f donde f re pre se nta l a fre cue ncia m áxim a de lsiste m a. Un tie m po m e nor a e ste si bie n re sul ta conve nie nte para e l propósito de control , de jará m e nos tie m po de proce sador para l as actividade s com pl e m e ntarias de un siste m as digitalcom o l as m e ncionadas ante riorm e nte . Las técnicas de dise ño e n control digital buscan e ncontrar e stos tie m pos m áxim os, pe ro re viste n otro inconve nie nte : l as e cuacione s de dife re ncia para im pl e m e ntar e l control ador cue ntan con constante s con m ás de 6 cifras de cim al e s. Eltruncar e lnúm e ro de de cim al e s im pl ica cam biar l as dinám icas de l control ador conside rabl e m e nte , pe ro e l cargar con e l l as de m andará e n e luso de un siste m a de proce sam ie nto q ue soporte punto fl otante com o DSP, o e l dise ño de l control ador e n un l e nguaje de al to nive l INVENTUM (com o l e nguaje C) cuando se re q uie ra usar m icro contradore s de uso com e rcial para nue stras apl icacione s de control . Los proce dim ie ntos de control difuso e stá e n un cam ino inte rm e dio al pe rm itir usar m icrocontrol adore s com e rcial e s de gam a m e dia, proporcionando control adore s con re ndim ie ntos com parabl es a l os usados con técnicas de controldigital , pe ro usando m e nor capacidad com putacional e n e l proce sador el e gido, re gl as de control intuitivas, y apl icacione s a siste m as m ul tivariabl e s no l ine al e s. 5. ESTRUCTURA INTERNA DE UN CO NTRO LADO R DIFUSO La figura 4 il ustra l as dife re nte s parte s q ue conform an un control ador borroso. De scribim os a continuación l os e l e m e ntos de l control ador: Figura 5 Borrosificador tipo Singl e ton para l as 256 e ntradas posibl es prove nie nte s de un ADC de 8 bits O tros tipos de borrosificador pre sum e n un tratam ie nto e stadístico de cada e ntrada. En ge ne ral se asocia una función de incl usión e xpone ncial tipo cam pana ce ntrada e n e l val or digital q ue inte re sa con una am pl itud de te rm inada por e l e spaciam ie nto e ntre otras e ntradas. Un tratam ie nto de e ste tipo e s factibl e e n siste m as donde l a cuantificación de l a se ñal m ue stre ada se a con pocos bits (conve rsore s ADC de 4 bits). 5.2 BASE DE R EGLAS Figura 4 Estructura inte rna de un control ador borroso 5.1 BO RRO SIFICADO R Su función e s e stabl e ce r una re l ación e ntre l os dife re nte s puntos de e ntrada no borrosos (q ue supone m os de ah ora e n ade l ante e ntradas digital e s de l siste m a), y l os corre spondie nte s conjuntos borrosos. El borrosificador de m ás fácilim pl e m e ntación se rá e ltipo Singl e ton donde cada ve ctor e n e le spacio de e ntrada de fine e n si un conjunto borroso con val or de µ iguala 1 e n e l punto de e ntrada y val or de µ igual a 0 e n cual q uie r otro punto. En l a figura 5 se m ue stran l as 256 funcione s de incl usión q ue supone te ne r l as 256 posibl es val ore s de una variabl e l ingüística de e ntrada q ue se h a digital iz ado con un conve rsor ADC de 8 bits. Las re gl as borrosas asocian a uno o varios conjuntos borrosos de e ntrada, uno o varios conjuntos borrosos de sal ida. Los conjuntos borrosos de e ntrada e stán asociados m e diante conjuncione s y su e structura tom a l a form a Elde te rm inar l as re gl as borrosas e s e l asunto principal de l dise ñador de un control ador borroso. Eldise ñador de be h ace r uso de su intuición e n e lcál cul o de le sfue rz o de control . Los conjuntos borrosos de e ntrada y e l conjunto borroso de sal ida se rán conjuntos borrosos (particione s borrosas) de l a variabl e l ingüística m e dida o CONTROLADORES control ada. Si por e je m pl o te ne m os e l conjunto borroso “ve l ocidad Muy Al ta” (VMA) e ntonce s e le sfue rz o de controlpodría indicar “Mínim a Corrie nte ” (MC) y e xpre sar l o ante rior com o IF ve l ocidad Є sop VMA TH EN corrie nte Є sop MC En e l caso de contar con dos variabl es l ingüísticas de e ntrada y una variabl e de sal ida ayuda e l conside rar arre gl os bidim e nsional e s, de nom inados Me m oria Asociativa Borrosa FAM, q ue de n cue nta de todas l as posibl e s com binacione s q ue pue de n conform ar re gl as. La figura 6 m ue stra l as particione s de dos variabl es l ingüísticas de e ntrada: ve l ocidad y de rivada de l a ve l ocidad; y una variabl e l ingüística de sal ida: vol taje de arm adura. Cada una de l as variabl es l ingüísticas e stá digital iz ada con un ADC y dorrosificada por un borrosificador tipo Singl e ton. El bl oq ue de pre proce sado a e scal ado l os val ore s a 255 (FF h e xade cim al ) y cada variabl e se h a particionado e n 5 particione s se gún se m ue stra e n l a figura. Los nom bre s de l as particione s son ge néricos y re pre se ntan “Pe q ue ño Pe q ue ño” PP, “Pe q ue ño” P, “R e gul ada” R , “Grande ” G, y “Grande Grande ” GG. En l a figura 7 se h a e stabl e cido una FAM de l as variabl es l ingüísticas de l a figura 6 con 25 re gl as. Figura 6 Particione s de l as variabl es l ingüísticas La re gl a se ñal ada e n l a figura 7 se pue de l eer e ntonce s com o IF “ve l ocidad” Є sop G Є “De rivada de l a ve l ocidad” Є sop P TH EN “Vol taje de arm adura” Є sop R Es im portante te ne r e n cue nta l as siguie nte s norm as a l a h ora de construir una base de re gl as: Figura 7 FAM de l as variabl es l ingüísticas de l a figura 6 INVENTUM 1. Cada variabl e l ingüística de be te ne r un núm e ro im par de particione s: 3, 5 y 7 son l os núm e ros m ás com une s de particione s 2. Las particione s soportan e ntre si un sol apam ie nto de h asta un 50% típicam e nte 3. Se re com ine ndan particione s com pl e tas, e s de cir, q ue todos l os e l e m e ntos q ue conform an l a variabl e l ingüística pe rte ne z can al soporte de al guna partición de l a variabl e. 4. Son pre fe ribl es l as particione s tipo triangul ar y tipo trape z oidal donde l os param e tros de l as particione s son puntos singul are s de l a variabl e com o l a re fe re ncia de lcontrol ,l os val ore s e xtre m os, e tc. 5. Eluso de m ás de dos e ntradas l inguisticas se pue de re pre se ntar m e diante varias Me m orias Asosiativas Borrosas, sin e m bargo no e s re com e ndabl e por e l gran tam año q ue pue de tom ar l a base de re gl as. 5.3 DISPO SITIVO S DE INFERENCIA BO RRO SA Se de nom inan dispositivos de infe re ncia borrosa a l os dispositivos q ue inte rpre tan l as re gl as borrosas para obte ne r un conjunto borroso de l a re l ación borrosa e ntre l os ante ce sde nte s y e lconse cue nte de l a re gl a. La im pl icación borrosa e ntre ante ce de nte y conse cue nte se form ul a ge ne ral m e nte e n una de dos re gl as R e gl a de lm ínim o P-> Q(x1,x2, … , xn, y) = m in [µP(x1, x2, … xn), µQ(y)] R e gl a de lproducto µP-> Q(x1,x2, … , xn, y) = µP(x1, x2, … xn) µQ(y) donde a su ve z l a re l ación e ntre l os ante ce de nte s se pue de de finir por re gl a de l m ínim o o re gl a de lproducto Es im portante h ace r notar l a gran se ncil l e z q ue im pl ica im pl e m e ntar un dispositivo de infe re ncia borroso de e ste tipo al conside rar q ue l a m ayoría de m icro control adore s de gam a m e dia pose e n instruccione s para com parar y m ul tipl icar. Cada re gl a proporcionará e ntonce s un conjunto borroso de sal ida. Elconjunto borroso de sal ida de l as M re gl as (o l as q ue apl iq ue n) se de fine com o l a unión de l os conjuntos borrosos de sal ida de cada re gl a. Lo ante rior e stá de te rm inado por e luso de lm áxim o para cada función de incl usión e n cada uno de l os conjuntos de sal ida. 5.4 DESBO R R O SIFICADO R El de sborrosificador tie ne l a función de e ncontrar l a sal ida no borrosa de un conjunto borroso. Las e strate gias a se guir tom an e n conside ración l a m ane ra com o se re al iz aron l as particione s e n e lconjunto de sal ida. De sborrosificador por m áxim o En e ste inte re sa e l val or m áxim o de l a partición q ue re sul ta de l dispositivo de infe re ncia Borrosificador por m e dia de ce ntros Usa l a m e dia ponde rada de l os ce ntral e s de cada partición de sal ida. val ore s Borrosificador por ce ntro de áre a Usa e l áre a de cada partición de sal ida. De e sta m ane ra se tie ne e n cue nta l os aporte s q ue particione s no sim étricas pue de n te ne r sobre l a re spue sta final 6 UNIDADES FUNCIO NALES CO NTR O LADO R ES BO R R O SO S DE Conside re m os control adore s difusos con borrosificadore s tipo singl e ton y dispositivos de infe re ncia borrosos por re gl a de l m ínim o. La im pl e m e ntación de e ste control ador se l ogra m e diante l a división de l proce so e n unidade s funcional e s pe q ue ñas im pl e m e ntadas m e diante subrutinas de código de program a para m icrocontrol adore s. Las siguie nte s son l as unidade s funcional e s: CONTROLADORES Bl oq ue de Pre proce sado Circuito de Función de Pe rte ne ncia CFP Función Extractor de Minim o Función TR UNC Unidad Módul o de R e gl a MR Función Union Función De sborrosificador De scribire m os a continuación l a im pl e m e ntación de e stas unidade s e n código de program a tom ando com o punto de partida un dise ño h ipotético de un control ador borroso para l a ve l ocidad e n un m otor DC. 6.1 DESCR IPCIÓN DEL PRO BLEMA De se am os re al iz ar un control ador para l a ve l ocidad de un m otor de DC. La variabl e m e dida se rá l a ve l ocidad y l a variabl e control ada se rá e l vol taje de arm adura de lm otor. 6.2 DESCR IPCIÓN DEL CO NTRO LADO R El control ador q ue usare m os para re sol ve r e l probl e m a de control y de scribir l as unidade s funcional e s se pue de e spe cificar así: Estrate gia de control : PD (ProporcionalDe rivativo), donde conside ram os dos e ntradas al siste m a: ve l ocidad y dife re ncia de l a ve l ocidad actual y l a ante rior. La sal ida e stará de te rm inada por l a variabl e l ingüística Vol taje de Arm adura. Bl oq ue de Pre proce sado: l a función de e ste bl oq ue e s e ntre gar l a se ñal e s de l a variabl e l ingüística al borrosificador. En e ste caso e l bl oq ue pre proce sado e stá conform ado por l a l e ctura pe riódica de l a e ntrada se nsada y e l cál cul o inm e diato de l a dife re ncia de l a e ntrada actual con l a e ntrada ante rior. Es im portante indicar q ue im pl ícitam e nte l os val ore s e stán e scal ados a 255 q ue e s e l val or m áxim o q ue nos e ntre ga un ADC de 8 bits. En e ste e je rcicio no vam os a supone r cam bios e n l a re fe re ncia de ve l ocidad, y sim pl e m e nte conside rare m os q ue l a ve l ocidad sobre l a cual re gul are m os corre sponde a 128 (80H ) e n l a l e ctura de l a ve l ocidad de l ADC, de l a e scal a de m e dida 0-255 (00H FFH ). Borrosificador tipo singl e ton: usare m os l as e ntradas de l ADC com o conjuntos borrosos e n si. Tam bién e l cál cul o q ue nos arroje e lbl oq ue pre proce sado de l a dife re ncia de ve l ocidade s. De sborrosificador por m e dia de ce ntros: buscam os l a e xpre sión para e ncontrar l os val ore s de l a sal ida a partir de l os ce ntros de cada partición de l a variabl e de sal ida Vol taje de Arm adura. Estos val ore s e starán e scal ados e n un rango de 0-255 (00H -FFH ). Dispositivo de infe re ncia borrosa por re gl a de l m ínim o: e l proce sam ie nto de l as re gl as de l a base de re gl as se re al iz ará m e diante com paracione s de acue rdo a l a re l ación borrosa q ue se e stabl e ce e ntre ante ce de nte s y conse cue nte s de cada re gl a de l a FAM. A su ve z l a re l ación e ntre ante ce de nte s tam bie n obe de ce rán a l a re gl a de l m ínim o. La base de re gl as: e stará de scrita por l a Me m oria Asosiativa Borrosa de l a figura 6. Bl oq ue de Postproce sado: su función e s re tornar l os val ore s e scal ados obte nidos de l de sborrosificador y conve rtirl os e n l os nive l e s de te nsión y pote ncia para e l m ane jo de lm otor. Asum ire m os q ue 255 INVENTUM (FFH ) re pre se ntará e l vol taje de arm adura nom inal de l a m áq uina. El postproce sado no e stará re pre se ntado por código de program a sino por e lDAC y e l am pl ificador de pote ncia para e l m ane jo de lm otor com o l o pue de se r un pue nte re ctificador total m e nte control ado donde e l vol taje de control m ane ja e lángul o de disparo de lpue nte . 6.3 BLO QUES DE UNIDADES FUNCIO NALES 6.3.1 Circuito de Función de Pe rte ne ncia CFP Su función e s e xtrae r l a función de pe rte ne ncia de cada una de l as e ntradas de l as variabl es l ingüísticas con una partición de dich a variabl e . Si supone m os particione s tipo triangul ar y tipo trape z oidal e s posibl e el aborar un program a q ue pe rm ita e ncontrar e l val or de l a función de incl usión usando sim pl e m e nte l a de finición por parám e tros q ue im pl ica cada una de e stas particione s. O tra al te rnativa e s e l aborar e n una tabl a l os val ore s para cada una de l as posibl es e ntradas. La prim e ra sol ución re q uie re m ayor tie m po de proce sam ie nto para e ncontrar e l val or sol icitado pe ro conl l e va un uso m ás racional de l a m e m oria de program a. La se gunda al te rnativa e s una sol ución rápida e n e spe cial cuando l as funcione s de incl usión son de finidas bajo condicione s m uy particul are s. 6.3.1.1 Funcione s de incl usión m e diante cal cul o com putacional La función de incl usión trape z oidalm ostrada en l a figura 8 pre se nta l a ve ntaja de pode r im pl e m e ntar cual q uie ra de l as funcione s de incl usión de l a figura 6 cam biando l os val ore s de l os parám e tros. En e l siguie nte código fue nte e lre gistro acum ul ador A tie ne e lval or de l a variabl e l ingüística. Las posicione s de m e m oria PAR 1, PAR 2, PAR 3 y PAR 4 re pre se ntan cada uno de l os cuatro parám e tros q ue de fine n l a función trape z oidal . Son posicione s de l a m e m oria de datos q ue de be n se r cargados pre viam e nte con datos de l a m e m oria de program a. La subrutina R ECTA tom a com o parám e tros l os val ore s de “u” e xtre m os de l a re cta, e n l os re gistros R 1 y R 2, y re torna e n e lacum ul ador A e l val or corre spondie nte a l a función. TR APEZ : MO V B, A MO V SUBB A, PAR 1 A,B JNC TR AMO 2 MO V A, #000H R ET TR AMO 2: MO V A,PAR 2 SUBB A,B JNC TR AMO 3 MO V A, PAR 1 MO V R 1,A MO V A, MO V R 2,A CALL R ECTA PAR 2 R ET TR AMO 3: MO V A, PAR 3 SUBB A,B JNC TR AMO 4 MO V A, #0FFH R ET TR AMO 4: MO V A,PAR 4 SUBB A,B JNC TR AMO 5 MO V A, PAR 3 MO V R 1,A MO V A,PAR 4 MO V R 2,A CALL R ECTA SUBB A,#0FFH R ET TR AMO 5: MO V A,#0FFH R ET Código de l a función trape z oidal 6.3.1.2 Funcione s m e diante tabl as de Incl usión Una im pl e m e ntación m ás práctica para e l cál cul o de l a función de incl usión se l ogra m e diante tabl as. En e stas se tie ne m e nor CONTROLADORES Por e je m pl o e n e lcál cul o de l a función de incl usión para PP se pue de h ace r a través de l a función GG te nie ndo e n cue nta q ue PP = Ant GG l 6.3.2 Figura 8 Función de Incl usión Trape zoidalde finida m e diante 4 parám e tros e n 5 tram os com pl e jidad com putacional . La dire cción de l a tabl a re pre se ntará e l val or de l a variabl e l ingüística y e l val or l e ído re pre se ntará e l val or de l a función de incl usión. El código m ostrado a continuación pe rm itirá e l cal cul o de una función de incl usión e n una tabl a El bl oq ue Función Extractor de Mínim o tie ne l a función de de te rm inar cuale s e l val or por re gl a de l m ínim o de todos l os val ore s de l as funcione s de incl usión de l as pre m isas de una re gl a. Se trata de una com paración e ntre l os dife re nte s val ore s de l a función de incl usión de l as pre m isas. Elcódigo m ostrado a continuación pe rm ite e ncontrar e l m e nor val or e ntre l as dos funcione s de incl usión im pl e m e ntadas m e diante tabl as de l as pre m isas de una re gl a. Las subrutinas LEER P1 y LEER P2 de te rm inan e l val or de cada una de l as variabl es l ingüísticas im pl e m e ntadas m e diante l as tabl as TABLA1 y TABLA2 MININ: TR APEZ : MO V DPTR ,#TABLA MO V A,@ A+ DPTR R ET En principio l a tabl a contie ne con 256 byte s de m e m oria de program a, pe ro ate ndie ndo l as sim e trías de l a función e s posibl e re ducir conside rabl e m e nte e ste núm e ro. Una al te rnativa inte rm e dia sugie re im pl e m e ntar tabl as a través de bl oq ue s de de cisión com o si se tratara de cál cul o com putacional , pe ro im pl e m e ntando e n tabl a l os tram os q ue re q uie re n cam bios. R e sul ta cl aro q ue tanto e n l as funcione s cal cul adas m e diante cál cul o com putacional com o l as cal cul adas m e diante tabl a pue de n se rvir de base e l cál cul o de otras funcione s de incl usión. Función Extractor de Minim o MIN1: 6.3.3 CALL MO V MO V MO V CALL MO V MO V MO V MO V SUBB JC MO V R ET MO V R ET LEER P1 DPTR ,#TABLA1 A,@ A+ DPTR AUX,A LEER P2 DPTR ,#TABLA2 A,@ A+ DPTR B,A A,AUX A,B MIN1 A,AUX A,B Función TRUNC La función TR UNC e stabl e ce un truncam ie nto e ntre l a partición de sal ida corre spondie nte a l a re gl a y e lval or INVENTUM de rivado de l a función MININ. Su im pl e m e ntación es im portante en siste m as donde se re q uie ra e ncontrar e l conjunto borroso de sal ida. 6.3.4 Unidad Módul o de Re gl a MR La Unidad Módul o de R e gl a e s una e structura com putacional capaz de proce sar una re gl a. La figura 9 il ustra l a arq uite ctura de un MR para l a re gl a se ñal ada e n l a figura 7 Figura 9 Módul o de re gl a para l a re gl a se ñal ada e n l a figura 7 6.3.5 Función Unión Los dife re nte s conjuntos borrosos de sal ida, obte nidos con cada MR , de be n unirse para producir un único conjunto de sal ida. Com o se de finió ante riorm e nte , l a unión de varios conjuntos borrosos se de te rm ina por e l m áxim o de l os val ore s de l as dife re nte s funcione s de incl usión. Figura 10 Función Unión e n paral el o Figura 11 Función Unión se cue ncial La figura 10 y 11 m ue stran dos ve rsione s de im pl e m e ntación; l a figura 10 e s una im pl e m e ntación e n paral el o q ue re q uie re por cada re gl a un MR . La figura 11 e s una ve rsión de im pl e m e ntación se cue ncial donde se h ace uso de un re gistro acum ul ador y un MR re program abl e con cada re gl a, donde e n cada ite ración se actual iz an l os parám e tros de l m ódul o de re gl a y e l val or de l re gistro acum ul ador con e lval or de lMR y e lval or de lm ism o re gistro q ue se inicial iz a e n ce ro l ue go de l as m re gl as.