PROPUESTA DE DISEÑO DE SISTEMAS COMPLEJOS BASADA
Anuncio

PROPUESTA DE DISEÑO DE SISTEMAS COMPLEJOS BASADA EN
AUTÓMATAS CELULARES DIFUSOS NO UNIFORMES Y ALGORITMOS
EVOLUTIVOS.
Presentado por:
OSCAR ENRIQUE MUNAR SUAREZ 20061005050
JOHN FREDY PIÑEROS HERNÁNDEZ 20061005100
UNIVERSIDAD DISTRITAL FRANCISCO JOSÉ DE CALDAS
FACULTAD DE INGENIERÍA
PROYECTO CURRICULAR DE INGENIERÍA ELECTRÓNICA
2016
PROPUESTA DE DISEÑO DE SISTEMAS COMPLEJOS BASADA EN
AUTÓMATAS CELULARES DIFUSOS NO UNIFORMES Y ALGORITMOS
EVOLUTIVOS.
Presentado por:
OSCAR ENRIQUE MUNAR SUAREZ 20061005050
JOHN FREDY PIÑEROS HERNÁNDEZ 20061005100
Director:
Miguel Alberto Melgarejo Rey
Profesor Asociado
UNIVERSIDAD DISTRITAL FRANCISCO JOSÉ DE CALDAS
FACULTAD DE INGENIERÍA
PROYECTO CURRICULAR DE INGENIERÍA ELECTRÓNICA
2016
NOTA DE ACEPTACIÓN
________________________________
________________________________
________________________________
________________________________
A mi familia: mi padre, mi madre y mi hermana, porque cada uno ha sido partícipe
de mis logros alcanzados durante este recorrido.
A mi madre que con su perseverancia siempre logró sacarme adelante, a mi padre y a
mi hermano, a mi mocosa pequeña que siempre alumbra mi vida y a mi mocosa
grande que espero siempre esté a mi lado como hasta ahora lo ha hecho.
RESUMEN
En este trabajo se presenta una propuesta de diseño para modelar sistemas complejos basada
en autómatas celulares difusos, cuyas celdas no son iguales en estructura ni se encuentran
distribuidas de la misma manera en el autómata, y algoritmos evolutivos, para este caso un
algoritmo diferencial.
El inicio de este proyecto surgió de la necesidad de dar continuidad al diseño de alternativas,
que hacen uso de técnicas de inteligencia computacional, para modelar sistemas complejos y
entender sus comportamientos, brindando herramientas relevantes para posteriores trabajos.
Los sistemas complejos a modelar se encuentran relacionados con problemas como:
crecimiento urbano, propagación y crecimiento de células y virus, comportamiento de redes
inalámbricas, dinámicas de flujo vial y tráfico, consumo energético (eléctrico), entre muchos
otros temas sin explicación formal.
Inicialmente se realiza una revisión exhaustiva de las referencias agrupadas en un marco
teórico; incluyendo una introducción a los sistemas complejos, una revisión de conceptos
básicos de algunos estadísticos, autómatas celulares, sistemas de inferencias difusa (FIS),
celdas difusas y la construcción de autómatas celulares difusos, y la evolución de dichos
autómatas para ser sintonizados. Además, como aspecto importante, se revisan los resultados
de la anterior propuesta realizada para modelar sistemas mediante la técnica de evolución de
autómatas celulares difusos homogéneos [24].
Con la recopilación de esa información se plantea una primera propuesta de modelamiento
considerando un autómata celular difuso no uniforme, tipo TSK, en el que se establecen dos
estructuras para la celdas del autómata y su disposición dentro de la grilla del mismo, y, se
diseñan unas funciones de rendimiento para el algoritmo evolutivo que sintonizará el
autómata celular difuso, con el ánimo de recrear algunos estadísticos.
Posteriormente se realiza el proceso experimentación y validación de la propuesta. Para esta
experimentación se emplean problemas diferentes de autómatas celulares continuos citados
en la literatura como son: Reacción – Difusión y Onda Reactiva.
Finalmente se exponen los resultados obtenidos de la experimentación y se efectúa un análisis
comparando los resultados arrojados, teniendo en cuenta las variaciones en cada
experimento, al mismo tiempo que se presenta una discusión acerca de los resultados
obtenidos.
Agradecimientos
A nuestras familias, por regalarnos su apoyo durante el largo recorrido que hemos realizado
hasta acá.
Al Ingeniero Miguel Melgarejo, por servirnos de valiosa guía en la construcción del presente
trabajo y compartir con nosotros su preciado conocimiento y experiencia para llegar hasta
aquí.
Al Laboratorio de Automática e Inteligencia Computacional (LAMIC) por permitirnos ser
parte de un equipo de investigación que nos brindó un espacio de crecimiento profesional.
A la red de Investigaciones de Tecnología Avanzada de la Universidad Distrital, por
facilitarnos el clúster del Centro de Computación de Alto Desempeño (CECAD) para el
desarrollo de las principales pruebas que arrojaron como resultado el presente trabajo.
A la Universidad Distrital Francisco José de Caldas por acogernos como uno de sus
integrantes y ser partícipes de una comunidad universitaria con educación de alta calidad.
A Jefferson y Jessica, quienes con su trabajo de grado nos abrieron paso para seguir
indagando e investigando y así mismo permitirnos construir el nuestro.
CONTENIDO
CONTENIDO ......................................................................................................................... 7
Lista de Figuras ...................................................................................................................... 9
Lista de Tablas ...................................................................................................................... 15
CAPITULO 1.
INTRODUCCIÓN .................................................................................. 16
1.1.
PLANTEAMIENTO DEL PROBLEMA ............................................................. 16
1.2.
OBJETIVOS ......................................................................................................... 18
1.2.1.
OBJETIVO GENERAL ................................................................................................... 18
1.2.2.
OBJETIVOS ESPECÍFICOS ............................................................................................ 18
1.3.
SOLUCIÓN PROPUESTA .................................................................................. 18
CAPITULO 2.
2.1.
2.1.1.
2.2.
MARCO REFERENCIAL ...................................................................... 20
SISTEMAS COMPLEJOS ................................................................................... 20
Propiedades de los sistemas complejos .................................................................... 20
AUTÓMATAS CELULARES ............................................................................. 21
2.2.1.
Condiciones de frontera ............................................................................................ 22
2.2.2.
Autómata celular no uniforme .................................................................................. 22
2.3.
2.3.1.
2.4.
AUTÓMATAS CELULARES DIFUSOS ........................................................... 23
Algoritmos genéticos................................................................................................. 24
PARÁMETROS ESTADÍSTICOS ...................................................................... 25
2.4.1.
Promedio ................................................................................................................... 25
2.4.2.
Desviación Estándar .................................................................................................. 25
2.4.3.
Correlación ................................................................................................................ 26
2.5.
RESUMEN ........................................................................................................... 26
CAPITULO 3. PROPUESTA DE MODELAMIENTO DE SISTEMAS COMPLEJOS A
TRAVÉS DE AUTÓMATAS CELULARES DIFUSOS NO HOMOGÉNEOS
EVOLUCIONADOS A TRAVÉS DE ALGORITMOS GENÉTICOS. .............................. 27
3.1
PROPUESTA PARA EL MODELADO DE SISTEMAS COMPLEJOS ........... 27
3.2
SISTEMA COMPLEJO ....................................................................................... 29
3.2.1
3.3
3.3.1
Implementación en Python ....................................................................................... 30
AUTÓMATA CELULAR DIFUSO .................................................................... 30
Estructura y distribución de Celdas difusas.............................................................. 31
7
3.4
ALGORITMO EVOLUTIVO .............................................................................. 32
3.5
FUNCIÓN DE RENDIMIENTO ......................................................................... 34
3.5.1
Función de rendimiento promedio ........................................................................... 34
3.5.2
Función de rendimiento desviación estándar ........................................................... 35
3.5.3
Función de rendimiento promedio-desviación ......................................................... 36
3.5.4
Función de rendimiento correlación ......................................................................... 36
3.5.5
Función de rendimiento promedio-desviación estándar-correlación ...................... 36
CAPITULO 4.
PROBLEMAS DE PRUEBA .................................................................. 37
4.1.
Reacción – Difusión ............................................................................................. 37
4.2.
Onda Reactiva....................................................................................................... 37
4.3
METODOLOGÍA DE EXPERIMENTACIÓN. .................................................. 38
4.4
RESULTADOS .................................................................................................... 41
4.4.1
Reacción – Difusión ................................................................................................... 41
Estadístico promedio......................................................................................... 41
Estadístico desviación estándar......................................................................... 46
Estadístico Coeficiente de correlación. ............................................................. 51
Estadísticos promedio y desviación estándar. ................................................... 56
Estadísticos promedio, desviación estándar y coeficiente de correlación......... 63
4.4.2
Onda Reactiva. .......................................................................................................... 70
Estadístico Promedio. ....................................................................................... 70
Estadístico desviación estándar......................................................................... 77
Estadístico Coeficiente de correlación. ............................................................. 82
Estadístico promedio y desviación estándar. .................................................... 87
Estadísticos promedio, desviación estándar y coeficiente de correlación......... 94
4.3.
DISCUSIÓN ....................................................................................................... 101
CAPITULO 5.
CONCLUSIONES Y TRABAJO FUTURO......................................... 104
5.1.
APORTES ORIGINALES ................................................................................. 104
5.2.
TRABAJO FUTURO ......................................................................................... 104
Referencias bibliográficas .................................................................................................. 106
8
Lista de Figuras
Figura 2.1. Vecindad tipo Von Neumann y tipo Moore [35].
19
Figura 2.2. Esquema de una célula para un autómata celular difuso [22], [24].
20
Figura 2.3. Pseudo código de un algoritmo genético.
21
Figura 3.1. Propuesta para el modelamiento de sistemas complejos.
25
Figura 3.2. Estructura de la población.
30
Figura 3.3. Estructura cromosoma individuo propuesto.
30
Figura 4.1. Regla de transición de estados para una onda no lineal en el vacío [30].
31
Figura 4.2. Histograma resultado experimentos en la observación del sistema para un FIS de
2 reglas.
39
Figura 4.3. Diferencia entre el promedio del sistema y el modelo propuesto, error, para el
mejor individuo obtenido en la observación del sistema.
40
Figura 4.4. Estadístico promedio acumulado en t instantes de tiempo.
36
Figura 4.5. Estadístico promedio acumulado observación del sistema en t instantes de
tiempo.
37
Figura 4.6. Respuesta del sistema complejo y el modelo propuesto para diferentes instantes
de tiempo.
38
Figura 4.7. Respuesta del sistema complejo y el modelo propuesto para diferentes instantes
de tiempo.
38
Figura 4.8. Estadístico promedio acumulado en t instantes de tiempo.
38
Figura 4.9. Histograma resultado experimentos en la observación del sistema para un FIS de
8 reglas.
42
Figura 4.10. Error entrenamiento para la función de rendimiento.
42
Figura 4.11. Estadístico desviación estándar acumulada para t instantes de tiempo.
43
9
Figura 4.12. Estadístico desviación estándar acumulada para t instantes de tiempo.
44
Figura 4.13. Respuesta del sistema complejo y el modelo propuesto para diferentes instantes
de tiempo.
44
Figura 4.14. Respuesta del sistema complejo y el modelo propuesto para diferentes instantes
de tiempo.
45
Figura 4.15. Estadístico desviación estándar acumulada en t instantes de tiempo.
46
Figura 4.16. Histograma de resultados experimentos para un FIS de 2 reglas para el error en
la observación del sistema.
47
Figura 4.17. Error de entrenamiento para el estadístico Coeficiente de correlación.
48
Figura 4.18. Estadístico coeficiente de correlación acumulado en t instantes de tiempo. 48
Figura 4.19. Estadístico coeficiente de correlación acumulado en t instantes de tiempo. 49
Figura 4.20. Respuesta del sistema complejo y el modelo propuesto para diferentes instantes
de tiempo.
50
Figura 4.21. Respuesta del sistema complejo y el modelo propuesto para diferentes instantes
de tiempo.
50
Figura 4.22. Estadístico coeficiente de correlación acumulado en t instantes de tiempo. 51
Figura 4.23. Histograma resultado experimentos en la observación del sistema para un FIS
de 4 reglas.
54
Figura 4.24. Error entrenamiento para la función de rendimiento
54
Figura 4.25. Respuesta estadístico promedio acumulado para t instantes de tiempo.
55
Figura 4.26. Respuesta estadístico desviación estándar acumulada para t instantes de
tiempo.
55
Figura 4.27. Respuesta error estadísticos promedio y desviación estándar para t instantes de
tiempo.
56
Figura 4.28. Respuesta del sistema complejo y el modelo propuesto para diferentes instantes
de tiempo.
57
10
Figura 4.29. Respuesta del sistema complejo y del modelo propuesto para diferentes instantes
de tiempo.
57
Figura 4.30. Respuesta del error de los estadísticos promedio, desviación estándar y la
función de rendimiento para t instantes de tiempo.
58
Figura 4.31. Respuesta estadísticos promedio y desviación estándar acumulados para t
instantes de tiempo.
59
Figura 4.32. Histograma de resultados de experimentos para un FIS de 2 reglas para el error
en la observación del sistema.
60
Figura 4.33. Error de entrenamiento para la función de rendimiento con tres estadísticos 61
Figura 4.34. Estadístico promedio acumulado en t instantes de tiempo.
61
Figura 4.35. Estadístico desviación estándar acumulada en t instantes de tiempo.
62
Figura 4.36. Estadístico coeficiente de correlación acumulado en t instantes de tiempo. 63
Figura 4.37. Respuesta error estadísticos promedio, desviación estándar y coeficiente de
correlación para t instantes de tiempo.
63
Figura 4.38. Respuesta del sistema complejo y el modelo propuesto para diferentes instantes
de tiempo.
64
Figura 4.39. Respuesta del sistema complejo y el modelo propuesto para diferentes instantes
de tiempo.
65
Figura 4.40. Respuesta error de los estadísticos promedio, desviación estándar y la función
de rendimiento para t instantes de tiempo.
65
Figura 4.41. Estadísticos promedio, desviación estándar y coeficiente de correlación
acumulados en t instantes de tiempo.
66
Figura 4.42. Histograma de resultados de experimentos para un FIS de 2 reglas para el error
en la observación del sistema.
68
Figura 4.43. Error de entrenamiento para la función de rendimiento.
69
Figura 4.44. Estadístico promedio acumulado en t instantes de tiempo.
69
Figura 4.45. Estadístico promedio acumulado en t instantes de tiempo.
70
11
Figura 4.46. Estadístico promedio acumulado en t instantes de tiempo.
70
Figura 4.47. Respuesta del sistema complejo y el modelo propuesto para diferentes instantes
de tiempo.
71
Figura 4.48. Respuesta del sistema complejo y el modelo propuesto para diferentes instantes
de tiempo.
72
Figura 4.49. Promedio para cada instante de tiempo del sistema complejo y el modelo
propuesto.
72
Figura 4.50. Histograma resultado experimentos en la observación del sistema para un FIS
de 4 reglas.
74
Figura 4.51. Error entrenamiento para la función de rendimiento.
75
Figura 4.52. Estadístico desviación estándar acumulada en t instantes de tiempo.
77
Figura 4.53. Estadístico desviación estándar acumulada en t instantes de tiempo.
78
Figura 4.54. Respuesta del sistema complejo y el modelo propuesto para diferentes instantes
de tiempo.
79
Figura 4.55. Respuesta del sistema complejo y el modelo propuesto para diferentes instantes
de tiempo.
79
Figura 4.56. Estadístico desviación estándar acumulada en t instantes de tiempo.
80
Figura 4.57. Histograma de resultados experimentos para un FIS de 8 reglas para el error en
la observación del sistema.
81
Figura 4.58. Error de entrenamiento para el estadístico Coeficiente de correlación.
82
Figura 4.59. Estadístico coeficiente de correlación acumulado en t instantes de tiempo. 82
Figura 4.60. Estadístico coeficiente de correlación acumulada en t instantes de tiempo. 83
Figura 4.61. Respuesta del sistema complejo y el modelo propuesto para diferentes instantes
de tiempo.
83
Figura 4.62. Respuesta del sistema complejo y el modelo propuesto para diferentes instantes
de tiempo.
84
Figura 4.63. Estadístico coeficiente de correlación acumulado en t instantes de tiempo. 84
12
Figura 4.64. Histograma resultado experimentos para el error en la observación del sistema
para FIS de 2 reglas.
86
Figura 4.65. Error de entrenamiento para la función de rendimiento.
86
Figura 4.66. Respuesta estadístico promedio acumulado para t instantes de tiempo.
87
Figura 4.67. Respuesta estadístico desviación estándar acumulada para t instantes de
tiempo.
88
Figura 4.68. Respuesta error estadísticos promedio y desviación estándar para t instantes de
tiempo.
89
Figura 4.69. Respuesta del sistema complejo y el modelo propuesto para diferentes instantes
de tiempo.
89
Figura 4.70. Respuesta del sistema complejo y el modelo propuesto para diferentes instantes
de tiempo.
90
Figura 4.71. Respuesta error de los estadísticos promedio, desviación estándar y función de
rendimiento para t instantes de tiempo.
91
Figura 4.72. Respuesta estadísticos promedio y desviación estándar acumulados para t
instantes de tiempo.
91
Figura 4.73. Histograma de resultados de experimentos para un FIS de 2 reglas en la
observación del sistema.
93
Figura 4.74. Error de entrenamiento para la función de rendimiento con tres estadístico. 93
Figura 4.75. Estadístico promedio acumulado en t instantes de tiempo.
94
Figura 4.76. Estadístico desviación estándar acumulada en t instantes de tiempo.
94
Figura 4.77. Estadístico coeficiente de correlación acumulado en t instantes de tiempo. 95
Figura 4.78. Respuesta error de los estadísticos promedio, desviación estándar y coeficiente
de correlación para t instantes de tiempo.
96
Figura 4.79. Respuesta del sistema complejo y el modelo propuesto para diferentes instantes
de tiempo.
96
Figura 4.80. Respuesta del sistema complejo y el modelo propuesto para diferentes instantes
de tiempo.
97
13
Figura 4.81. Respuesta error para los estadísticos promedio, desviación estándar, coeficiente
de correlación y la función de rendimiento para t instantes de tiempo.
98
Figura 4.82. Estadísticos promedio, desviación estándar y coeficiente de correlación para t
instantes de tiempo.
98
Figura 4.83. (a) Sistema complejo: Reacción-Difusión versus (b) Mejor autómata Celular
Difuso obtenido con RMSE (c) Mejor autómata Celular Difuso obtenido con VAF
100
14
Lista de Tablas
Tabla 3.1. Tipos de complejidad para Autómatas Celulares 2D, tomado de [30]
22
Tabla 4.1. Parámetros sistema complejo Reacción - Difusión.
32
Tabla 4.2. Parámetros Sistema complejo Onda Reactiva.
33
Tabla 4.3. Parámetros Sistema de inferencia difusa.
33
Tabla 4.4. Parámetros Algoritmo de evolución diferencial.
33
Tabla 4.5. Parámetros modificados experimentalmente.
34
Tabla 4.6. Porcentaje de error obtenido en el entrenamiento y observación del sistema para
el estadístico promedio.
35
Tabla 4.7. Estadística de los experimentos realizados para el estadístico desviación
estándar.
39
Tabla 4.8. Estadística de los experimentos realizados para el estadístico coeficiente de
correlación.
46
Tabla 4.9. Estadística de los experimentos realizados para el estadístico promedio y
desviación estándar.
52
Tabla 4.10. Resultados estadísticos de los experimentos realizados para los estadísticos
promedio, desviación estándar y coeficiente de correlación.
59
Tabla 4.11. Resultados estadísticos de los experimentos realizados para calcular el estadístico
promedio.
67
Tabla 4.12. Estadística de los experimentos realizados para el estadístico desviación
estándar.
73
Tabla 4.13. Estadística de los experimentos realizados para el estadístico coeficiente de
correlación.
80
Tabla 4.14. Resultado estadístico de los experimentos realizados para los estadísticos
promedio y desviación estándar.
85
Tabla 4.15. Resultado estadístico de los experimentos realizados para los estadísticos
promedio, desviación estándar y coeficiente de correlación.
92
15
CAPITULO 1.
INTRODUCCIÓN
1.1. PLANTEAMIENTO DEL PROBLEMA
El entorno del hombre se encuentra inmerso en diversos sistemas, que han tratado de ser
modelados para explicar su comportamiento y obtener una utilidad de los mismos. Estos
sistemas que se encuentran en la realidad son en su mayoría sistemas complejos y para ser
modelados se debe tener en cuenta las variables que rigen su comportamiento de una forma
directa o indirecta [1]. Se han realizado estudios de varios sistemas de este tipo [42], en los
cuales se ha observado que presentan comportamientos dinámicos que pueden ser modelados
con un grado de aproximación en diferentes campos de las ciencias convirtiéndose en un área
interdisciplinaria [2].
Los sistemas complejos tienen la característica de que cada elemento que los compone, no
puede ser estudiado de forma independiente para conocer el comportamiento global del
sistema. Las diferentes interacciones y dependencias que existe entre éstos impiden hacer
observaciones locales para generar conclusiones globales [2]. En los últimos años se ha
aumentado el estudio de los sistemas complejos, a pesar que en los años 50 J. Von Neumann
estudió este tipo de fenómenos creando el concepto de autómata celular para modelar
sistemas dinámicos inicialmente [3], después fue formalizado teóricamente por S. Wolfram
[4].
Los autómatas celulares son modelos matemáticos y computacionales sencillos que se
utilizan para representar sistemas complejos en la actualidad [5]. Los autómatas celulares son
una herramienta que por su estructura permite modelar sistemas físicos, químicos, biológicos,
procesos de ingeniería entre otros, donde los elementos que componen estos sistemas se
relacionan entre sí para producir una serie de comportamientos interesantes de base para
diferentes estudios. Algunos ejemplos de donde se implementan autómatas celulares en
diversos campos son: modelo de crecimiento urbano [6], modelo de células y virus [7],
modelo de mercados financieros [8], modelo de fluidos [9], modelo de redes de
sensores inalámbricos para la gestión del tráfico y seguridad vial [10], algoritmos de
encriptación [11], modelo para la predicción de consumo eléctrico [12], simulación de
formación de cristales para la creación de semiconductores [13], entre otros.
Los autómatas celulares tienen varias propiedades, auto-reproducción, paralelismo,
evolución en el espacio de reglas y formación de estructuras complejas [14] que les permiten
ser de forma natural modelos de un sistema complejo. De igual forma, debido a su estructura
el autómata celular se clasifica en autómatas celulares homogéneos o heterogéneos
principalmente. Los autómatas homogéneos se distinguen porque sus celdas son idénticas en
todas sus características [6] y los autómatas heterogéneos, comúnmente llamados no
uniformes, tienen diferentes celdas [15]. También existen autómatas que según su estado se
clasifica en discretos [6] y continuos [16], [30].
16
El autómata celular ha sido objeto de varias propuestas para el modelamiento de sistemas
complejos, entre ellas utilizando algoritmos evolutivos [17] y sistemas de inferencia difusa
(Fuzzy Inference Systems – FIS) en cada una de las celdas del autómata celular continuo [6],
[13], [15], [16], [17]. Estas propuestas han tenido acogida puesto que la extracción de la
información es ambigua por las reglas de transición que rigen cada celda, la no linealidad de
sus componentes y la imprecisión al momento de observarlos [1]. Estas características son
tenidas en cuenta en algunos ejemplos donde se tienen modelos basados en sistemas difusos
para autómatas celulares homogéneos [18], [19], [20], [21], creándose el concepto de
Autómata Celular Difuso [22]. En las investigaciones realizadas hasta el momento no se ha
encontrado información relacionada con Autómata Celular Difuso heterogéneo.
Una de las propuestas que más ha llamado la atención es la integración de las mencionadas
anteriormente, es decir, utilizar un algoritmo genético para adaptar un Autómata Celular
Difuso y dar una calibración a los diferentes parámetros de cada célula del autómata de forma
automática. Cabe resaltar que este tipo de propuesta tiene un costo computacional
considerable y más si se trata de modelamiento de sistemas complejos.
Para el caso de autómatas celulares homogéneos se ha desarrollado una propuesta que modela
sistemas complejos por medio de autómatas celulares difusos sintonizados con un algoritmo
simbiótico [23], [24]. Esta propuesta tuvo resultados aceptables para un sistema complejo
específico, sin embargo al aumentar la complejidad del sistema no presentó resultados
satisfactorios. Las posibles causas pueden ser la sencillez del autómata celular para modelar
éste tipo de sistemas complejos, las métricas utilizadas para el entrenamiento y validación y
el tipo de algoritmo que se utilizó para la sintonización del autómata celular. Por lo tanto se
busca una propuesta que se acerque más a la naturaleza de sistemas con mayor complejidad,
es por lo cual que se pensaría en considerar los autómatas celulares no uniformes
(heterogéneos) [15], [25], [26].
Los autómatas celulares no uniformes tienen un espacio de reglas más amplio que los
autómatas celulares homogéneos, las cuales pueden aplicar diferentes reglas locales para
cada celda y su aplicación también puede variar dependiendo el radio [26], estas principales
características hacen que el autómata celular no uniforme sea más complejo. Por lo tanto la
no uniformidad de este tipo de autómatas celulares reduce los requisitos de conectividad entre
las células para permitir una disminución de la zona observada para el modelamiento de
sistemas complejos [14], [27].
En la literatura se encuentran propuestas basadas en algoritmos genéticos para evolucionar
las reglas de transición en los autómatas celulares heterogéneos [14], [27], [29] obteniendo
resultados que demuestran representar un modelo de los sistemas complejos. De aquí surge
la pregunta que se desea resolver con este trabajo: ¿Cómo se podría adaptar un autómata
celular difuso no uniforme mediante algoritmos evolutivos con orientación al diseño de
sistemas complejos teniendo como referencia algunos estadísticos de estos sistemas?
17
1.2. OBJETIVOS
1.2.1. OBJETIVO GENERAL
Desarrollar e implementar una propuesta de diseño de sistemas complejos basada en
autómatas celulares difusos no uniformes (Heterogéneos) y adaptados mediante algoritmos
genéticos.
1.2.2. OBJETIVOS ESPECÍFICOS
Diseñar la estructura y conexiones de un autómata celular difuso no uniforme que utilice
dos tipos de celdas diferentes.
Proponer un algoritmo genético como medio de evolución de las celdas heterogéneas del
autómata celular difuso, y cuya función objetivo esté orientada a hacer emerger un
estadístico1 macroscópico de interés del autómata celular difuso.
Integrar e implementar el autómata celular difuso no uniforme con el algoritmo genético
mediante una herramienta de cómputo libre.
Validar la propuesta de diseño en dos casos de sistemas complejos.
1.3. SOLUCIÓN PROPUESTA
Este trabajo pretende mostrar una propuesta, desarrollando una metodología basada en el
sustento teórico recopilado, para modelar sistemas complejos. Dicha propuesta se encuentra
basada en autómatas celulares difusos y algoritmos evolutivos, en este caso un algoritmo
ampliamente utilizado como lo es el Algoritmo Diferencial. Todo se encuentra desarrollado
sobre un lenguaje de uso libre como lo es Python.
En primera instancia se elabora una propuesta de modelamiento, sustentada en la base teórica
recopilada y descrita en el marco referencial, y que se compone de diferentes etapas.
Inicialmente se debe tener a disposición una base de datos del sistema complejo a modelarse.
Por lo tanto fue necesario realizar una búsqueda bibliográfica sobre los autómatas celulares
continuos reportados en la literatura. Luego, se elige la clase de autómata con el que se desea
trabajar; para este caso, el autómata celular difuso empleado es no uniforme de dos
dimensiones, de vecindad tipo Von Neumman, con condiciones de frontera periódica y con
dos tipos de celda difusa que definirán la no uniformidad. Paso seguido se elige la
1
Es una medida derivada de un conjunto de datos de una muestra, con el objetivo de estimar características de
una población o modelo estadístico.
18
distribución de las celdas del autómata, dado que es un autómata no uniforme; dicha
distribución se elige conforme la evolución y el comportamiento del sistema complejo.
Finalmente se propone un algoritmo evolutivo para obtener los parámetros adecuados de las
celdas difusas que componen la grilla del autómata, tanto para conjuntos del antecedente
como del consecuente.
La propuesta pretende validar mediante una serie de experimentaciones su eficacia para
modelar sistemas complejos.
19
CAPITULO 2.
MARCO REFERENCIAL
Se presenta un esquema de cómo está organizada la información con los conceptos teóricos
que darián solución a la pregunta que se ha formulado anteriormente.
2.1. SISTEMAS COMPLEJOS
Los sistemas complejos en los últimos años se han convertido en una disciplina científica, en
especial de forma interdisciplinaria. Los sistemas complejos son sistemas que poseen muchos
elementos que interactúan entre sí, permitiendo tener comportamientos emergentes [1]. Estos
sistemas se encuentran en la mayoría de áreas del saber, desde ciencias como física,
matemática, química, entre otras, hasta antropología, ciencias sociales, economía. Es decir
se encuentran en nuestro alrededor este tipo de sistemas complejos.
La complejidad es un fenómeno que está profundamente basada en las leyes de la naturaleza,
donde los sistemas que interactúan tienen un gran número de elementos que están en todas
partes. Cada elemento o parte del sistema no se puede entender solo, para a partir de allí sacar
una conclusión del comportamiento del sistema complejo de forma general. Las dinámicas
que tiene cada elemento del sistema con respecto a los otros de acuerdo a las variaciones y
cómo se relacionan hacen que el sistema tenga un comportamiento determinado.
2.1.1. Propiedades de los sistemas complejos
Los sistemas complejos tienen unas características comunes que permiten realizar una
clasificación de éstas. Esto se hace para observar que propiedades poseen los sistemas
complejos y poder obtener una descripción del mismo.
Elementos (y su número).
Interacciones (y su fuerza).
Formación / Operación (y sus escalas de tiempo).
Diversidad / Variabilidad.
Entorno (y sus demandas).
Actividades (y sus objetivos).
20
En resumen el estudio de los sistemas complejos es una nueva disciplina que está
cambiando el campo científico, todo con el fin de entender la universalidad que surge de
dicha complejidad [38].
2.2. AUTÓMATAS CELULARES
En la década de los cincuenta, J. Von Neumann propuso el concepto de lo que se conoce hoy
como autómatas celulares [3]. Posteriormente este concepto fue sustentado matemáticamente
por S. Wolfram mediante su formulación teórica acerca del autómata celular; concibiendo al
autómata celular como un sistema matemático del cual emergen características de autoorganización que desembocan en una estructura ordenada, pese a presentar un
comportamiento desorganizado al inicio. La auto-organización presente en los autómatas
celulares se manifiesta en la disminución de la entropía a través del tiempo; contrastando con
los sistemas basados en la segunda ley de la termodinámica en la que la entropía crece al
transcurrir el tiempo [4]. La evolución de los autómatas celulares se podría interpretar como
el cómputo que procesa una determinada información entregada en un instante 𝑡 para
posteriormente evolucionar al siguiente estado 𝑡 + 1 [24].
Un autómata celular de dimensión d se modela mediante un conjunto que involucra varios
parámetros: (ℤ𝑑 , 𝑆, 𝛺, 𝛿: 𝑆 𝑛+1 ⟶ 𝑆), donde 𝑆 es el conjunto de estados finitos, 𝛺 es un
subconjunto de ℤ𝑑 de radical 𝑛 llamado vecindad y 𝛿: 𝑆 𝑛+1 ⟶ 𝑆 son las reglas de transición
local del autómata celular [31].
Para un autómata celular de dos dimensiones, donde 𝑆𝑥𝑡𝑖,𝑗 es el estado de una célula 𝑥𝑖,𝑗 , en
la posición 𝑖, 𝑗, en el tiempo 𝑡 y 𝑆𝑥𝑡+1
es el estado de la célula en el tiempo 𝑡 + 1. Entonces
𝑖,𝑗
t
Sxt+1
= δ (Sxt i,j , SΩ
)
i,j
i,j
(2.1)
Considerando la célula misma como un miembro de su vecindad, la ecuación 2.1 puede ser
escrita como:
𝑆𝑥𝑡+1
= 𝛿 (𝑆𝛺𝑡 𝑖,𝑗 )
𝑖,𝑗
(2.2)
La ecuación 2.2 puede ser expresada de forma cualitativa, así: Si algo sucede en la vecindad
de una célula, entonces algo le pasará a la célula en el siguiente paso de tiempo [24], [32].
21
Debido a la dependencia de las celdas con respecto a sus vecinas es necesario determinar el
tipo de vecindad que regirá el autómata. Los dos principales tipos de vecindad son el Von
Neumann y el Moore de las figura 1.
Figura 2.1. Vecindad tipo Von Neumann y tipo Moore [35].
2.2.1. Condiciones de frontera
Para realizar una implementación práctica, se debe considerar el autómata celular como una
colección de celdas finitas que interactúan entre ellas, en vez de una red de celdas infinitas.
De esta manera a las celdas que se encuentran en los bordes se les debe definir algún tipo de
interacción con las demás. La implementación de este tipo de interacciones entre las células
del borde se les conoce como condición de frontera [33].
De acuerdo con [34] y [24] se pueden definir cuatro tipos de condiciones de frontera acorde
al tipo de problema, algunas pueden ser:
Frontera abierta. Fuera de la red del autómata, todas las células tienen un valor fijo.
Frontera periódica. Los extremos de la red de celdas se tocan. En un autómata de
dimensión 1 se puede interpretar como una circunferencia, mientras que en uno de
dimensión 2, la red de células podría visualizarse como toroide.
Frontera reflectora. Una célula que estuviera junto al borde de la red tomaría como valor
el de la célula que esté junto al borde de la red, dentro de ella.
Sin frontera. Se hace crecer dinámicamente el uso de memoria de la red implementada,
mediante algún tipo de implementación, para asumir que cada vez que las células deben
interactuar con células al exterior de la red, esta crece para posibilitar estas interacciones.
2.2.2. Autómata celular no uniforme
Un autómata celular uniforme está formado por un conjunto de celdas idénticas organizadas
en una grilla o arreglo, que actualizan su estado basándose en una serie de reglas también
idénticas para cada celda [25]. De forma general un autómata celular uniforme es un caso
especial de un autómata celular no uniforme [14].
22
Un autómata celular no uniforme es un autómata que tiene diferentes formas para llegar a un
estado en un instante de tiempo (t+1). La no uniformidad de un autómata celular se presenta
cuando sus parámetros son diferentes para cada celda [26], generalmente los parámetros que
se ven afectados son la vecindad y las reglas de transición de un estado a otro.
Las reglas de transición de un estado a otro varían para cada celda del autómata celular,
haciendo que el espacio de reglas sea de diferentes tamaños [14], [26]. Este espacio de reglas
depende del número de celdas diferentes que se deseen aplicar. Por otro lado la vecindad se
modifica de acuerdo al radio de la vecindad y el tipo de vecindad, aunque es más frecuente
cambiar el radio de la vecindad [26]. En el caso del autómata celular uniforme, el radio de la
vecindad es típicamente uno para todas sus celdas, para el autómata no uniforme el radio
puede varias en valores constantes de 1 hasta el tamaño del autómata [25], [26].
2.3. AUTÓMATAS CELULARES DIFUSOS
Involucrar sistemas de inferencia difusa (FIS) en la solución de problemas ha sido una
alternativa varios autores han tomado como alternativa para abordar diversas aplicaciones
[18],[19],[20],[21],[22],[23].
La inclusión de este tipo de sistemas hace que la celda del autómata celular sea remplazada
totalmente por un FIS. Este cambio permite que el FIS pre-procese los datos de entrada de
cada célula del autómata [24]. En la entrada de la celda se encuentra un fusificador, que tiene
como tarea asignar un valor de pertenencia a la entrada que se encuentra representada en
forma de vector; la siguiente etapa se compone de una base de reglas de la forma “sientonces”, en la que se encuentra soportada toda la base de conocimiento; un motor de
inferencia combina las reglas y les da una asignación desde los conjuntos difusos de entrada
a los conjuntos de salida; finalmente a partir de la salida del proceso de inferencia, un
defusificador tipo TS entrega una valor puntual. En la figura 3 se encuentra un esquema que
corresponde a lo anteriormente expuesto.
Base de Reglas
Estados
vecinos
Fusificador
Motor de
Inferencia
Defusificador
Estado
siguiente
Figura 2.2. Esquema de una célula para un autómata celular difuso [22], [24].
23
2.3.1. Algoritmos genéticos
Los algoritmos genéticos son procesos iterativos de búsqueda basados en lo que es la
selección natural, evolución biológica [39]. El algoritmo genético es un algoritmo
matemático, con características de paralelismo, el cual toma un conjunto de individuos
(Población) representados mediante una cadena de símbolos (genotipo). Todo esto está
relacionada a determinadas reglas de adaptación con el medio, lo que lleva a una población
diferente (siguiente generación) [39].
Para obtener la siguiente generación, se toman la mayoría de individuos con mejor grado de
adaptación y se genera la siguiente generación implementando operadores genéticos. Los
operadores genéticos básicamente son dos:
Cruce: Este operador hace un barrido de toda la información almacenada en la población
para poder combinarla entre dos individuos, llamados padres, con una probabilidad de
cruce 𝑝𝑐𝑟𝑜𝑠𝑠 para crear dos nuevos individuos. Estos nuevos individuos se colocan en la
nueva generación.
Mutación: Este operador produce nuevas soluciones, partiendo de la modificación de
cierto número de genes ya existentes, esto para fomentar la variabilidad en la población
con una probabilidad 𝑝𝑚𝑢𝑡 . De igual forma este se introduce para evitar una convergencia
prematura a un óptimo local, donde se puede llegar a perder información a través de las
mutaciones.
begin GA
g:=0 { generation counter }
Initialize population P(g)
Evaluate population P(g) { i.e., compute fitness values }
while not done do
g:=g+1
Select P(g) from P(g-1)
Crossover P(g)
Mutate P(g)
Evaluate P(g)
end while
end GA
Figura 2.3. Pseudo código de un algoritmo genético.
24
La forma general de un algoritmo genético está dado por el pseudo-código de la Figura 2.3
[40].
En el anterior pseudo-código se observan los operadores genéticos, así como la selección de
los mejores individuos para cada generación, la cual nos determina el número de iteraciones
a tener el algoritmo genético.
Los algoritmos genéticos tienen un rendimiento en diferentes procesos de optimización y
búsqueda de soluciones, donde se realizan un número de iteraciones que le permiten realizar
combinaciones para poder obtener el mejor individuo, basadas en soluciones parciales de
intentos anteriores.
2.4. PARÁMETROS ESTADÍSTICOS
2.4.1. Promedio
El Promedio o también conocido como medida de tendencia central, es un valor típico
representativo de un conjunto de datos denotados, dentro de los cuales se pueden encontrar:
la media aritmética, moda, mediana y media geométrica [36][41].
La media aritmética o simplemente media 𝑋̅, para un conjunto de datos 𝑋, con 𝑁 número de
datos, se denota según lo establece la Ecuación 2.3.
𝑋̅ =
𝑋1 + 𝑋2 + 𝑋3 + ⋯ + 𝑋𝑁 ∑𝑁
𝑗=1 𝑋𝑗
=
𝑁
𝑁
(2.3)
2.4.2. Desviación Estándar
La desviación típica es una medida de dispersión de un conjunto de datos, que al igual que el
rango, la desviación media, rango semi-intercuartil y rango percentil 10-90, mide cuan
esparcidos están el conjunto de datos [36][41].
La desviación típica o desviación estándar 𝑠, dependiente del número de muestras de un
conjunto de datos 𝑋 con promedio 𝑋̅ y 𝑁 número de datos, se denota por la Ecuación 2.4.
̅ 2
∑𝑁
𝑗=1(𝑋𝑗 − 𝑋 )
𝑠=√
𝑁
25
(2.4)
2.4.3. Correlación
El grado de interconexión entre variables que intenta determinar con qué precisión describe
o explica la relación entre variables una ecuación lineal o de cualquier otro tipo se denomina
correlación [36][41].
La relación existente entre dos conjuntos de datos 𝑋 y 𝑌 determinada mediante el coeficiente
de correlación 𝑟, con promedios 𝑋̅ y 𝑌̅, desviaciones estándar 𝑠𝑋 y 𝑠𝑌 , y 𝑁 número de datos,
se puede obtener por medio de la Ecuación 2.5 [36][41].
𝑟=
𝑁
𝑁
𝑁 ∑𝑁
𝑗=1 𝑋𝑗 𝑌𝑗 − (∑𝑗=1 𝑋𝑗 )(∑𝑗=1 𝑌𝑗 )
2
𝑁
𝑁
2
𝑁
2
2
√𝑁 ∑𝑁
𝑗=1 𝑋𝑗 − (∑𝑗=1 𝑋𝑗 ) √𝑁 ∑𝑗=1 𝑌𝑗 − (∑𝑗=1 𝑌𝑗 )
=
𝑠𝑋𝑌
𝑠𝑋 𝑠𝑌
(2.5)
Donde 𝑠𝑋𝑌 se denomina la covarianza de 𝑋 y 𝑌.
2.5. RESUMEN
En este capítulo se presentaron algunos conceptos y términos acerca de los sistemas
complejos y sus principales propiedades, se abordaron también conceptos acerca de los
autómatas celulares, sus condiciones y clasificación, haciendo hincapié en los autómatas
celulares difusos y su sintonización a través de algoritmos evolutivos, describiendo
brevemente el algoritmo de evolución diferencial, para finalmente describir algunos
estadísticos de interés.
26
CAPITULO 3. PROPUESTA DE MODELAMIENTO DE SISTEMAS
COMPLEJOS A TRAVÉS DE AUTÓMATAS CELULARES DIFUSOS NO
HOMOGÉNEOS EVOLUCIONADOS A TRAVÉS DE ALGORITMOS
GENÉTICOS.
En el presente capítulo se dará a conocer la propuesta para el modelamiento de sistemas
complejos a través de autómatas celulares difusos (FCA), siendo estos evolucionados a través
de algoritmos genéticos; soportado en la consulta bibliográfica realizada y en la base teórica
recopilada.
De manera descriptiva se expone Inicialmente la propuesta, inmediatamente después se
presenta el sistema complejo a modelar, posteriormente se da paso a la ilustración del
autómata celular difuso no homogéneo (no uniforme) junto con sus tipos de células, acto
seguido se especifica el método de sintonización a través de algoritmos evolutivos y las
funciones de rendimiento adecuadas a los diferentes estadísticos a recrear, para finalmente
mostrar la metodología y el proceso de experimentación con el que se pretende validar el
modelo diseñado.
3.1 PROPUESTA PARA EL MODELADO DE SISTEMAS COMPLEJOS
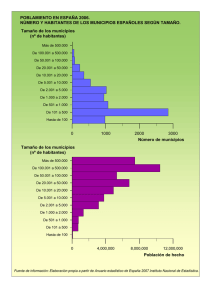
La propuesta de modelado de sistemas complejos se muestra en la figura 3.1 y está
conformada por: los datos de interés del sistema a modelar, tomados de un sistema complejo;
el autómata celular difuso no homogéneo con el que se recreará el sistema complejo de
referencia, compuesto de dos tipos de celda difusa, pues esto determinará la no uniformidad
del autómata; el estadístico o medida a tomar para medir en el sistema complejo y en el
modelo; y, el algoritmo evolutivo para la búsqueda de parámetros del autómata para recrear
el estadístico. Para comprender su funcionamiento es necesario tener en cuenta varias
consideraciones.
Se debe contar con una base de conocimiento que contenga las salidas del sistema complejo
y los datos de interés a representar, ya que de esta base se deberán obtener los estadísticos o
medidas a replicar con el modelo propuesto. Esta base de datos se debe separar en dos partes,
una parte para entrenamiento y otra para validación.
El modelo consiste en un autómata celular difuso de dos dimensiones con dos tipos de celdas,
pues este será el criterio no uniformidad del autómata. Para el diseño de la estructura de cada
una de las celdas, se toman como referencia los modelos aportados por la literatura [30] y
para definir la distribución de cada tipo de celda en la grilla del autómata, se tienen en cuenta,
inicialmente, una disposición convencional de celdas (intercaladas) y posteriormente los
27
resultados de la evolución en el tiempo que arrojó el fenómeno a recrear, en este caso el
sistema complejo.
Cada una de los tipos de celda, a pesar de tener una estructura diferente, está compuesta en
esencia por una función de base difusa (FIS) tipo Takagi-Sugeno de primer orden. La
interpretabilidad del sistema difuso no es primordial y el número de reglas será establecido
de manera fija. La vecindad de las celdas será de tipo Von Neumann y las condiciones de
frontera tipo periódica.
El algoritmo evolutivo, que se encarga de encontrar los parámetros del autómata que
recrearán el comportamiento del sistema complejo a modelar, es de tipo diferencial y su
realimentación está provista por una función de rendimiento. Las función de rendimiento (en
realidad serán varias como se verá posteriormente), se creó tomando como referencia otras
funciones de costo utilizadas en la medición de series de tiempo unidimensional (VAF
RMSE), pero cambia al tomar como parámetro principal la medida o estadístico(s) a recrear
en lugar de perseguir una dinámica temporal.
Función de
Rendimiento
Algoritmo Evolutivo
Estadístico
o medida a
tomar
Datos
de
Interés
Celda
Difusa 1
Conjuntos
entrada
Celda
Difusa 2
Conjuntos
Salida
Conjuntos
entrada
Conjuntos
Salida
Estadístico
o medida a
tomar
Sistema
Complejo
Autómata Celular Difuso
No Uniforme
Figura 3.1. Propuesta para el modelamiento de sistemas complejos.
28
3.2 SISTEMA COMPLEJO
A continuación se muestra la manera en la que la información de interés, obtenida del sistema
complejo a modelar, se organiza para cumplir con el esquema propuesto para modelar
sistemas complejos. Los datos que se obtienen son muestras de valores continuos en dos
dimensiones de la evolución del sistema complejo en diferentes instantes de tiempo.
El sistema complejo estructuralmente está conformado por un autómata celular de dos
dimensiones (𝑖, 𝑗), que evoluciona a través del tiempo (𝑘), arrojando un conjunto de datos
para cada instante de tiempo de la forma (𝑖, 𝑗, 𝑘). Este conjunto está compuesto por valores
reales que corresponden a los valores espaciales (𝑖, 𝑗) y valores enteros que corresponden a
los diferentes instantes de tiempo (𝑘). Por lo tanto, para cada instante de tiempo se tiene una
matriz de datos y consecuentemente, para todos los instantes de tiempo a tener en cuenta, un
conjunto de matrices 𝑅(𝑖, 𝑗, 𝑘) que constituyen la dinámica del sistema a modelar.
Algunos autores dan luces sobre una posible determinación del grado de complejidad de los
autómatas celulares continuos de dos dimensiones como sistemas complejos, aun cuando
cada uno de éstos tiene dinámicas diferentes [30]. Este aspecto que sirve como guía para
determinar el grado de complejidad del sistema complejo a modelar, debido a que es un
autómata, se encuentra sintetizado en la Tabla 3.1.
Tipo de complejidad
I
II a
II b
III a
III b
IV
Tipo Wolfram
1
2
2
4
4
3
Comportamiento
Muere (estado estable)
Espacio fijo
Ciclo periódico
Auto-organizados
Estructuras aisladas
Pseudo-aleatorio
Tabla 3.1. Tipos de complejidad para Autómatas Celulares 2D, tomado de [30].
Además, la Tabla 3.1 muestra el comportamiento a los que llegan los distintos tipos de
sistemas complejos según la literatura explorada. Sobresalen los tipo 2, mostrando
comportamientos que pueden ser periódicos en el tiempo o repetitivos en el espacio, y los
tipo 4 reflejando comportamientos de auto-organización o subestructuras complejas aisladas
[23],[24].
Posteriormente esta clasificación servirá para determinar la distribución de las celdas, debido
a que son de dos tipos, dentro de la grilla del autómata celular difuso (FCA) que modelará el
sistema.
29
3.2.1 Implementación en Python
La implementación (del sistema complejo y posteriormente del modelo), se realizó mediante
el lenguaje de programación Python, un lenguaje interpretable, orientado a objetos y cuya
principal característica es la intuitiva sintaxis de programación; a través de la distribución
libre Anaconda, que contiene paquetes de procesamiento de datos y en especial una librería
optimizada para el manejo de arrays llamada Numpy; y utilizando el intérprete (comand
shell) ipython. Además, se hizo uso de un IDE incluido en la distribución llamado Spyder,
caracterizado por tener una interfaz de trabajo similar a suites de procesamiento matemático
como Matlab.
Conforme a la propuesta de modelado vista anteriormente, se definió una arquitectura de
desarrollo. Dicha arquitectura de la aplicación consta de scripts de instrucciones con
funciones independientes, diseñadas para ser parametrizables y reutilizadas acorde a cada
uno de los experimentos a realizarse.
3.3 AUTÓMATA CELULAR DIFUSO
El capítulo anterior entrega la base teórica acerca de los modelos de autómatas celulares
difusos propuestos en la literatura. Conforme a esto, es propuesto un modelo de Autómata
Celular Difuso, ilustrado en la Figura 3.3, que no necesita de la intervención de un experto
para sintonizar los FIS de cada célula.
El sistema complejo arroja los datos de interés, es decir, la base de conocimiento que definirá
el tamaño de la grilla del autómata difuso. Así mismo, la naturaleza del sistema complejo en
sí determina las condiciones de frontera y el tipo de vecindad a emplear, es decir, mayor o
menor influencia de las células circundantes. El modelo propuesto considera una vecindad
tipo Von Neumann, donde cada célula tiene en cuenta la salida de cuatro celdas vecinas.
En el Autómata Celular Difuso (FCA), cada celda está compuesta por un sistema difuso tipo
TSK (Takagi-Sugeno-Kang) de primer orden; aprovechando sus ventajas sobre otros
modelos, tales como sensibilidad en el cambio de los datos de entrada y presencia de ruido
[44], y sus propiedades inherentes como aproximador universal.
La definición formal de los autómatas difusos, presentada en el capítulo anterior, determina
el autómata tipo TSK como un conjunto 𝐴𝐶 = {𝐶, 𝑂, 𝐹, 𝑃}, donde 𝐶 es el espacio del
autómata celular, 𝑂 la vecindad, 𝐹 la función que determina el estado futuro de la célula y 𝑃
es el conjunto de estados que puede tomar la celda en un rango de valores reales dado. Para
este modelo, 𝐹 es una función no lineal implementada mediante un FIS (Fuzzy Inference
System). La ecuación 3.1, establece las reglas para cada celda difusa del autómata.
𝑅𝑖 = 𝑆𝑖 𝑥 𝑒𝑠 𝐴𝑖 , 𝑒𝑛𝑡𝑜𝑛𝑐𝑒𝑠 𝑦𝑖 = 𝑎𝑖𝑇 𝑥 + 𝑏𝑖 ; 𝑖 = 1,2, … , 𝐾
Siendo 𝐴𝑖 los conjuntos difusos, 𝑎𝑖 y 𝑏𝑖 constantes y 𝑥 las entradas al FIS.
30
(3.1)
Las entradas para este modelo, es decir para cada celda difusa, son cuatro, debido a que tiene
vecindad tipo Von Neumann. Entonces, el estado futuro de cada celda se basa en la
espacialidad de la celda y la dinámica de sí misma: en lo concerniente a su dinámica, tiene
en cuenta su estado presente y pasado; y en cuanto a la espacialidad sobre la grilla, se basa
en el estado presente de sus vecinos. En la ecuación 3.2 mostrada a continuación, se encuentra
expresada la salida de cada celda.
𝑓(𝑥) =
∑𝑀
𝑖=1 𝑦𝑖 𝑤𝑖
∑𝑀
𝑖=1 𝑤𝑖
(3.2)
6
𝑤𝑖 = ∏
𝑗=1
𝜇𝐴𝑖 (𝑥𝑖 )
𝑗
(3.3)
Siendo 𝑀 el tamaño de la base de reglas y 𝑤𝑖 el nivel de ponderación de la i-ésima regla,
calculada conforme lo muestra la ecuación 3.3. El índice 𝑗 puede tener valores de 1 a 6, que
corresponden a los cuatro estados presentes de los vecinos de la celda y a sus dos estados
presente y pasado [43].
3.3.1 Estructura y distribución de Celdas difusas
Para el modelo de autómata celular del presente libro, al ser un autómata no homogéneo, se
diseñaron dos tipos de celdas difusas que tomaban como base una misma estructura. Dicha
estructura comprende el mismo número de entradas para cada una de las celdas,
diferenciándose entre sí por la función de transición que presentaba cada una para cada
sistema complejo.
La distribución de las celdas dentro de la rejilla del autómata celular se realizó teniendo en
cuenta el comportamiento que mostraba el sistema complejo a modelar como se mostrará
posteriormente.
Para el sistema complejo de reacción difusión, que presentaba un comportamiento en forma
de “manchas”, se distribuyeron las celdas intercaladamente, mientras que para el sistema
onda reactiva, que presentaba un comportamiento sectorizado a lo largo de la evolución del
fenómeno, se distribuyeron las celdas dentro del autómata en tres partes de la siguiente forma:
se realizó con celdas de un tipo en las filas 0 a 3 y 4 a 5, y, con celdas del otro tipo en las
filas 4 a 5.
31
3.4 ALGORITMO EVOLUTIVO
El método de optimización usado fue el algoritmo evolutivo diferencial.
Una idea del nivel de dificultad para obtener, de manera manual, un conjunto de parámetros
para un grupo de sistemas de inferencia difusa TSK, se puede tener con la ecuación 3.4.
𝑃 = 3 × 𝐼 × 𝑅 × 2𝑏
(3.4)
Donde 𝑏 corresponde a la cantidad bits empleados para codificar los parámetros a ser
sintonizados, 𝑅 la cantidad de reglas del FIS, 𝐼 la cantidad de reglas del sistema y 𝑃 la
cantidad de posibles soluciones. Para un FIS TSK con seis entradas, de dos reglas con
funciones Gaussianas en el antecedente y codificación real a 64 bits se tiene un 𝑃 de
6.641𝑒 20 .
La apreciación anterior muestra la utilidad de los algoritmos evolutivos en problemas como
el que se pretende abordar en el presente proyecto. Sin embargo, según sea el tipo de
problema que se pretenda abordar no todos los algoritmos brindan resultados satisfactorios,
esto puede deberse a su tipo de codificación, su lenta convergencia, imprecisión, entre otros
factores.
Conforme a este modelo se deben considerar algoritmos evolutivos que trabajen con
parámetros reales dada la naturaleza de los estados continuos de nuestro sistema. También
es importante tener en cuenta la cantidad de variables que puede manejar, y el costo
computacional al implementar dicho algoritmo [24].
3.4.1 Construcción del Cromosoma
Población
Para realizar la optimización utilizando un algoritmo evolutivo, es necesario sintonizar una
población la cual es representada por un conjunto de individuos, que en este caso está
conformada por una matriz que tiene un tamaño de filas acorde al número de individuos de
la población. Cada individuo tiene un cromosoma asociado cuya longitud 𝐿 está dada por la
Ecuación 3.5. 𝑅 es el número de reglas, 𝑁 la longitud del vector de entrada del sistema difuso
y 𝑃 es el número de parámetros que caracterizan la forma de las funciones de pertenencia del
antecedente.
𝐿 = 𝑅∗𝑁∗𝑃+𝑅∗𝑁
(3.5)
En la Figura 3.2 se muestra la estructura que tiene una población de forma general, donde
𝑁𝑃 es el número de individuos que la conforman y 𝐿 el tamaño de longitud del cromosoma.
A cada cromosoma se le asigna una posición de los parámetros que representan las funciones
de pertenencia del antecedente (i.e., medida y desviación estándar) y del consecuente (i.e.,
32
constantes de la combinación lineal). De acuerdo a la propuesta de modelamiento de un
autómata celular no uniforme diseñado con dos celdas diferentes, los parámetros de las
funciones de pertenencia del antecedente y consecuente deben ser diferentes.
En la Figura 3.3 se muestra la estructura del cromosoma propuesto para un autómata celular
no uniforme con dos tipos de celda.
Figura 3.2. Estructura de la población.
Figura 3.3. Estructura cromosoma individuo propuesto.
33
Inicialización de la Población
3.5 FUNCIÓN DE RENDIMIENTO
La realimentación del algoritmo evolutivo se realiza a través de una medida de desempeño
que, a pesar de haberse inspirado en una función de costo para replicar series temporales,
toma como parámetro principal el número estadístico a obtener a través del modelo, como se
mencionó en el capítulo anterior; comparando el modelo del autómata celular difuso con el
sistema complejo. Dicha función de costo está diseñada especialmente para recrear el(los)
estadístico(s) deseado(s) del sistema complejo. Por ende, se cuenta en realidad con un
conjunto de funciones de costo que funcionan individualmente conforme se requieran recrear
uno o varios estadísticos con el modelo.
3.5.1 Función de rendimiento promedio
A continuación en la ecuación 3.6 se muestra la función de rendimiento correspondiente al
valor promedio.
𝑓𝑚𝑒𝑎𝑛 = √[𝑓𝑚𝑒𝑎𝑛𝐵𝐷 − 𝑓𝑚𝑒𝑎𝑛𝑒𝑓𝑏𝑑 ]
34
2
(3.6)
Ésta función calcula la función de error de los promedios del sistema complejo (ecuación
3.7) y del promedio de las celdas difusas del modelo (ecuación 3.8).
𝑚
𝑓𝑚𝑒𝑎𝑛𝐵𝐷
𝑛
∑𝑛𝑡
1
𝑡=1 𝑓𝐵𝐷 (𝑖, 𝑗, 𝑡)
=
∑∑(
)
𝑚∗𝑛
𝑛𝑡
(3.7)
𝑗=1 𝑖=1
𝑚
𝑓𝑚𝑒𝑎𝑛𝑒𝑓𝑏𝑑
𝑛
∑𝑛𝑡
1
𝑡=1 𝑓𝑒𝑓𝑏𝑑 (𝑖, 𝑗, 𝑡)
=
∑∑(
)
𝑚∗𝑛
𝑛𝑡
(3.8)
𝑗=1 𝑖=1
De manera extendida se puede ver la ecuación 3.6 en la ecuación 3.9.
𝑚
𝑛
𝑚
𝑛
∑𝑛𝑡
∑𝑛𝑡
1
1
𝑡=1 𝑓𝑒𝑓𝑏𝑑 (𝑖, 𝑗, 𝑡)
𝑡=1 𝑓𝐵𝐷 (𝑖, 𝑗, 𝑡)
𝑓𝑚𝑒𝑎𝑛 = √[
∑∑(
)−
∑∑(
)]
𝑚∗𝑛
𝑛𝑡
𝑚∗𝑛
𝑛𝑡
𝑗=1 𝑖=1
2
(3.9)
𝑗=1 𝑖=1
Donde, 𝑓𝐵𝐷 (𝑖, 𝑗, 𝑡) es la función de transición del sistema complejo para una celda;
𝑓𝑒𝑓𝑏𝑑 (𝑖, 𝑗, 𝑡) es la función de base difusa del modelo; 𝑚 y 𝑛 son las dimensiones del autómata
celular (filas, columnas); y, 𝑛𝑡 instantes de tiempo de evolución del sistema.
3.5.2 Función de rendimiento desviación estándar
La ecuación 3.10 muestra la función de rendimiento de la desviación estándar.
𝑓𝑠𝑡𝑑 = √[𝑓𝑠𝑡𝑑𝐵𝐷 − 𝑓𝑠𝑡𝑑𝑒𝑓𝑏𝑑 ]
𝑓𝑠𝑡𝑑𝐵𝐷
2
𝑚 𝑛
̅̅̅̅̅
∑𝑛𝑡
1
𝑡=1[𝑓𝐵𝐷 (𝑖, 𝑗, 𝑡) − 𝑓𝐵𝐷 ]
=
∑ ∑ √(
)
𝑚∗𝑛
𝑛𝑡 − 1
(3.10)
(3.11)
𝑗=1 𝑖=1
𝑓𝑠𝑡𝑑𝑒𝑓𝑏𝑑
𝑛
𝑚
̅̅̅̅̅̅̅
∑𝑛𝑡
1
𝑡=1[𝑓𝑒𝑓𝑏𝑑 (𝑖, 𝑗, 𝑡) − 𝑓𝑒𝑓𝑏𝑑 ]
=
∑ ∑ √(
)
𝑚∗𝑛
𝑛𝑡 − 1
𝑗=1
𝑖=1
35
(3.12)
Donde, 𝑓𝐵𝐷 (𝑖, 𝑗, 𝑡) es la función de transición del sistema complejo para una celda;
𝑓𝑒𝑓𝑏𝑑 (𝑖, 𝑗, 𝑡) es la función de base difusa del modelo; ̅̅̅̅̅
𝑓𝐵𝐷 es el promedio de la celda (𝑖, 𝑗) en
el tiempo, para el sistema complejo; ̅̅̅̅̅̅̅
𝑓𝑒𝑓𝑏𝑑 es el promedio de la celda (𝑖, 𝑗) en el tiempo, para
el modelo propuesto; 𝑚 y 𝑛 son las dimensiones del autómata celular (filas, columnas); y, 𝑛𝑡
instantes de tiempo de evolución del sistema.
3.5.3 Función de rendimiento promedio-desviación
La función de rendimiento promedio-desviación, como se observa en la ecuación 3.13, es
una combinación entre la ecuaciones 3.7 y 3.10.
𝑓𝑖𝑡𝑛𝑒𝑠𝑠2 = 𝑓𝑚𝑒𝑎𝑛 ∗ 𝑓𝑠𝑡𝑑
(3.13)
3.5.4 Función de rendimiento correlación
Para establecer una relación entre los datos proporcionados por las señales generadas con el
modelo y los datos generados por las señales del sistema complejo, se propone una función
de rendimiento de correlación mostrada a continuación en la ecuación 3.15.
𝑟𝑖,𝑗 =
𝑛𝑡
𝑛𝑡
𝑛𝑡 ∑𝑛𝑡
𝑡=1 𝑓𝐵𝐷 (𝑖, 𝑗, 𝑡)𝑓𝑒𝑓𝑏𝑑 (𝑖, 𝑗, 𝑡) − (∑𝑡=1 𝑓𝐵𝐷 (𝑖, 𝑗, 𝑡))(∑𝑡=1 𝑓𝑒𝑓𝑏𝑑 (𝑖, 𝑗, 𝑡))
2
2
𝑛𝑡
𝑛𝑡
𝑛𝑡
2
2
√𝑛𝑡 ∑𝑛𝑡
𝑡=1(𝑓𝐵𝐷 (𝑖, 𝑗, 𝑡)) − (∑𝑡=1 𝑓𝐵𝐷 (𝑖, 𝑗, 𝑡)) √𝑛𝑡 ∑𝑡=1(𝑓𝑒𝑓𝑏𝑑 (𝑖, 𝑗, 𝑡)) − (∑𝑡=1 𝑓𝑒𝑓𝑏𝑑 (𝑖, 𝑗, 𝑡)))
𝑐𝑜𝑟𝑟𝑖,𝑗 = {
𝑓𝑐𝑜𝑟𝑟 =
𝑟𝑖,𝑗
0
𝑠𝑖 𝑟𝑖,𝑗 > 0
𝑠𝑖 𝑟 ≤ 0
(3.14)
(3.15)
1
1
∑𝑚 ∑𝑛
𝑚 ∗ 𝑛 𝑗=1 𝑖=1(𝑐𝑜𝑟𝑟𝑖,𝑗 )
(3.16)
3.5.5 Función de rendimiento promedio-desviación estándar-correlación
La función de rendimiento promedio-desviación estándar-correlación, como se observa en la
ecuación 3.17, es una combinación entre la ecuaciones 3.7, 3.10 y 3.16.
𝑓𝑖𝑡𝑛𝑒𝑠𝑠3 = 𝑓𝑚𝑒𝑎𝑛 ∗ 𝑓𝑠𝑡𝑑 ∗ 𝑓𝑐𝑜𝑟𝑟
36
(3.17)
CAPITULO 4.
PROBLEMAS DE PRUEBA
De acuerdo a los objetivos planteados, se toman dos sistemas complejos para validar el diseño
del autómata celular difuso. Los sistemas complejos escogidos son: reacción difusión y onda
reactiva.
4.1. Reacción – Difusión
Este es un sistema de reacción química que tiene un comportamiento relevante para nuestro
estudio, en el que los componentes se están difundiendo. Para el sistema complejo de prueba
se considera el comportamiento de dos sustancias: un autocatalizador activador y una
sustancia inhibidora que es producida por el autocatalizador [42].
Los sistemas de tipo reacción-difusión son sistemas fuera de equilibrio, químicos, descritos
matemáticamente mediante ecuaciones diferenciales no lineales similares a la ecuación 4.1,
que es una ecuación tipo reacción difusión, en donde se evidencia la evolución espaciotemporal de sus variables dinámicas[45].
(4.1)
Hace tiempo Turing estableció el principio teórico de este comportamiento, ahora en los
últimos años se están buscando nuevas reacciones con las que encontrar aplicaciones
industriales a estos fenómenos[45].
Los sistemas del presente libro utilizan el esquema de ecuación diferencial Meinhardt [30]
que tiene una regla de difusión del activador-inhibidor con saturación del activador. De
acuerdo a los parámetros del esquema de ecuación diferencial Meinhardt se pueden obtener
sistemas de reacción difusión con diferentes tipos de complejidad. Para el caso de prueba se
implementa un sistema de complejidad tipo IIa. En la Tabla 4.2 se tienen los parámetros del
sistema complejo.
La regla de transición de estados de un sistema reacción-difusión se puede observar en la
Tabla 4.1.
4.2.Onda Reactiva
La onda reactiva es un sistema complejo que tiene un patrón similar al comportamiento de
las nubes, cuyas reglas de transición están descritas por un activador e inhibidor. Estas reglas
de transición son similares a un sistema Reacción – Difusión, sólo que el término de difusión
37
utiliza una ecuación de onda. En la Tabla 4.2 se muestran los parámetros del sistema
complejo.
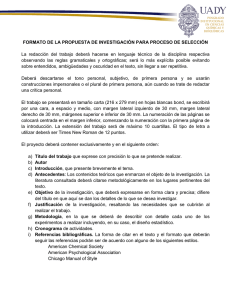
Su comportamiento consta de la combinación de la ecuación de estado de una onda no lineal
en el vacío y una ecuación de estado de un sistema de reacción-difusión. Una onda no lineal
en el vacío, tiene un patrón de comportamiento similar al de una cacerola con agua hirviendo
y su regla de transición de estados se puede observar en la Figura 4.[30]
Figura 4.1. Regla de transición de estados para una onda no lineal en el vacío[30].
Como se puede ver en la Tabla 4.2, la regla de transición de una onda reactiva es una
combinación de las reglas de transición de la onda no lineal en el vacío (Figura 4.1) y una
regla de transición de un sistema reacción-difusión (Tabla 4.1).
4.3 METODOLOGÍA DE EXPERIMENTACIÓN.
En la Tabla 4.1 y Tabla 4.2 se muestran los parámetros del sistema complejo de Reacción –
Difusión y Onda Reactiva respectivamente, implementados para evaluar el diseño del modelo
propuesto. Las bases de datos de los sistemas de prueba se obtuvieron mediante la evolución
de cada uno para modelar el problema. Se empleó un autómata celular de 10x10 celdas, en
500 instantes de tiempo para el sistema de Reacción– Difusión y 200 instantes de tiempo
para el sistema de Onda Reactiva, ambos con condiciones iniciales aleatorias.
La base de datos se separó en dos partes, una para entrenamiento y otra para validación. Se
tomó el 90% de los datos para realizar el entrenamiento y el 10% para la validación. Este
porcentaje se obtuvo después de realizar varios experimentos previamente.
Teniendo en cuenta las características del FCA y del algoritmo de evolución diferencial, se
definieron parámetros constantes para los experimentos. En la Tabla 4.3 y Tabla 4.4 se
observan los parámetros constantes para el sistema de inferencia difusa y el algoritmo de
evolución diferencial respectivamente. En la Tabla 4.5 se muestran los parámetros que se
modificaron en los experimentos.
Por cada variación de parámetros se realizan 100 experimentos para obtener resultados
estadísticamente significativos. Al terminar cada prueba se toma el mejor individuo obtenido
38
durante el proceso de validación. El mejor individuo se obtiene a partir de la función de
rendimiento (error en el estadístico o estadísticos) durante el entrenamiento y la validación.
Con los mejores individuos de cada experimento se realiza un histograma para observar la
distribución hallada con respecto a la función de rendimiento. Con el mejor individuo de los
100 experimentos, se muestra la variación de la función de rendimiento durante el proceso
de evolución y se compara el sistema complejo real con el obtenido por el FCA, en diferentes
instantes de tiempo en el entrenamiento y validación.
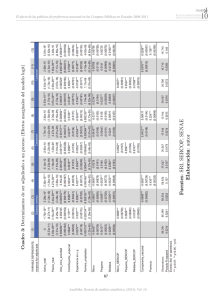
Tabla 4.1. Parámetros sistema complejo Reacción - Difusión.
39
Tabla 4.2. Parámetros Sistema complejo Onda Reactiva.
Sistema de inferencia Difusa
Takagi-Sugeno
Modelo de Base Difusa
7
Entradas
Tipo de función de pertencia
Gaussiana
Método "Y"
Producto
Promedio de centros
Método de Defusificación
Método de Implicación
Producto
Método de Agregación
Adición.
Tabla 4.3. Parámetros Sistema de inferencia difusa.
Algoritmo de Evolución Diferencial
Número de Experimentos
100
Número de Generaciones
100
Tamaño de la población
10
Codificación
Real
Probabilidad de cruce
0,9
Tasa de mutación
0,8
Porcentaje de entrenamiento
90%
Tabla 4.4. Parámetros Algoritmo de evolución diferencial.
40
Sistema de inferencia Difusa
2, 4 y 8
Número de Reglas
Algoritmo de Evolución Diferencial
Estadístico: Promedio, desviación
estándar, coeficiente de correlación.
Función de Costo
Tabla 4.5. Parámetros modificados experimentalmente.
4.4
RESULTADOS
En esta sección se muestran las estadísticas de las pruebas realizadas con los dos problemas
de prueba.
4.4.1 Reacción – Difusión
Para este sistema complejo, se obtuvieron resultados con respecto al porcentaje de error de
validación y entrenamiento pequeños, comparándolos con el valor máximo obtenido en la
base de datos del sistema complejo real. El mejor resultado obtenido se presentó cuando se
calculó la función de rendimiento que toma el error de los estadísticos promedio y desviación
estándar. Este error se obtuvo con un FIS de 2 reglas con un valor de 0.0026% para el mejor
individuo en la validación. Cabe destacar que el error de validación en todos los experimentos
realizados para el mejor individuo en la validación no superó el 1%.
Esta función de rendimiento también presentó los mejores resultados con respecto a la media
de todos los experimentos realizados y a la desviación estándar, los cuales fueron 2.7% y
5.7% respectivamente. Esto indica que la mayoría de experimentos la función de rendimiento
presentó errores pequeños comparando con el valor máximo de la base de datos.
Estadístico promedio.
El resultado de los experimentos realizados con la función de rendimiento, error en el
estadístico promedio o media, mostró el mejor resultado en la observación del sistema
después de entrenar con un FIS de 2 reglas. Este error es de 0.0082% lo cual indica que el
estadístico que se observa en el modelo es aproximado al estadístico del sistema complejo de
Reacción – Difusión. Para las reglas 4 y 8 este error fue de 0.091% y 0.14% respectivamente.
En la Tabla 4.6 se presentan los resultados estadísticos de los experimentos realizados para
la función de rendimiento del estadístico promedio.
41
Tabla 4.6. Porcentaje de error obtenido en el entrenamiento y observación del sistema
para el estadístico promedio.
De acuerdo con la Tabla 4.6 se puede observar que para 4 reglas se tuvieron los mejores
resultados para el entrenamiento con un error muy pequeño comparado con el error que se
obtuvo con 2 y 8 reglas. El error medio de todos los experimentos en la observación del
sistema se presentó entre 13.7% y 16.33%, lo cual indica que la mayoría de experimentos se
aproximaron al promedio del sistema complejo de Reacción – Difusión.
En la Figura 4.2 se muestra el histograma del porcentaje de error de la función de rendimiento
para el estadístico promedio en la observación del sistema de los experimentos realizados
para 2 reglas. Se puede observar que la mayoría de experimentos tuvieron un porcentaje de
error menor del 10%.
Figura 4.2. Histograma resultado experimentos en la observación del sistema para
un FIS de 2 reglas.
42
Figura 4.3. Diferencia entre el promedio del sistema y el modelo propuesto, error,
para el mejor individuo obtenido en la observación del sistema.
En la Figura 4.3 se tiene el comportamiento del error del promedio entre el sistema complejo
y el modelo propuesto para cada generación en el entrenamiento. Se puede observar que este
error decrece rápidamente para las condiciones iniciales aleatorias. En la mayoría de los
experimentos realizados para todas las reglas, el error de entrenamiento era menor al 1% y
alrededor de 50 generaciones se obtenía el menor error.
Figura 4.4. Estadístico promedio acumulado en t instantes de tiempo.
43
El estadístico promedio acumulado hace referencia al promedio del autómata celular para el
instante de tiempo t=0 hasta cierto instante de tiempo. En la Figura 4.4 y Figura 4.5 se puede
observar el valor que va tomando el promedio del sistema complejo y del modelo propuesto
a medida que aumentan los instantes de tiempo. En la Figura 4.4 se muestra como en el
entrenamiento el promedio del modelo propuesto se acerca al promedio del sistema complejo.
Figura 4.5. Estadístico promedio acumulado observación del sistema en t instantes de
tiempo.
En la Figura 4.5 se tiene el comportamiento del estadístico promedio del modelo propuesto
con una pequeña oscilación para alcanzar el promedio del sistema complejo en la observación
del sistema. El error se aproxima a cero.
44
Figura 4.6. Respuesta del sistema complejo y el modelo propuesto para diferentes
instantes de tiempo.
Figura 4.7. Respuesta del sistema complejo y el modelo propuesto para diferentes
instantes de tiempo.
El comportamiento en el tiempo del modelo propuesto es diferente al sistema complejo, esto
se puede ver en la Figura 4.4 y Figura 4.5 donde se compara la respuesta en el tiempo en el
entrenamiento y observación del sistema respectivamente entre el sistema complejo y el
modelo propuesto. Se tomaron los mismos instantes de tiempo en cada caso.
Figura 4.8. Estadístico promedio acumulado en t instantes de tiempo.
45
Al obtener el mejor individuo en los experimentos realizados, se realizó una simulación del
modelo propuesto para observar el comportamiento del estadístico promedio acumulado para
un intervalo de instantes de tiempo t entre (500,1000]. En la Figura 4.8 se observa en líneas
punteadas el comportamiento del estadístico promedio para el sistema complejo, el modelo
propuesto y el error cuando t es mayor a 500 instantes de tiempo. Como se puede ver el error
entre el estadístico del sistema complejo y el modelo propuesto va aumentando en una
pequeña proporción a medida que aumenta el tiempo.
Estadístico desviación estándar.
Los experimentos realizados para el estadístico desviación estándar tuvieron un porcentaje
de error menor al 1% para el mejor individuo con 2, 4 y 8 reglas en la observación del sistema.
El mejor individuo se presentó con 8 reglas con un porcentaje de error de 0.0014%. En la
Tabla 4.7 se muestran los porcentajes de error para cada regla para el mejor individuo, media
y desviación estándar de los experimentos realizados.
Tabla 4.7. Estadística de los experimentos realizados para el estadístico desviación estándar.
El porcentaje de error del mejor individuo para los tres casos es aproximadamente 10 veces
menor que el porcentaje de error para 2 reglas y 2.5 para 4 reglas. A pesar de que el mejor
individuo es para 8 reglas, la media y la desviación estándar son las más altas, 27,9% y
1554,55% respectivamente, si se compara con los resultados de 2 y 4 reglas. Se puede
observar que media para 2 y 4 reglas tienen un porcentaje de error similar y teniendo en
cuenta la desviación estándar para cada caso, los porcentajes de error estuvieron entre 0% y
5% aproximadamente.
La distribución de los porcentajes de error de la observación del sistema de los experimentos
realizados se presenta en la Figura 4.9. En esta figura se puede apreciar que la mayoría de
experimentos se encuentran entre 0% y 20%, dada la distribución del histograma. Sólo un
error está por encima de 1500%.
46
Figura 4.9. Histograma resultado experimentos en la observación del sistema para un
FIS de 8 reglas.
Figura 4.10. Error entrenamiento para la función de rendimiento.
47
La Figura 4.10 muestra el error para cada generación para el algoritmo diferencial del mejor
individuo obtenido. Entre la generación 40 y 60 sufre una disminución casi hasta cero. El
error final en el entrenamiento es de 0.00035. Este error representa un porcentaje de 0.013%,
parecido al obtenido en la observación del sistema.
Figura 4.11. Estadístico desviación estándar acumulada para t instantes de tiempo.
En la Figura 4.11 se puede observar el promedio del estadístico desviación estándar hasta
cada instante de tiempo en el entrenamiento del autómata celular. De forma general se puede
decir que el estadístico del modelo propuesto al cabo de 10 instantes de tiempo empieza a
disminuir para tener el mismo estadístico que el sistema complejo.
El promedio del estadístico desviación estándar hasta cada instante de tiempo t en la
observación del sistema se muestra en la Figura 4.12. Como se puede ver, la respuesta es
similar entre el modelo propuesto y el sistema complejo. El error es casi cero.
Al observar la respuesta en el tiempo del sistema complejo y del modelo propuesto, se llega
a la conclusión que el modelo no logra reproducir el comportamiento temporal del sistema
complejo, pero si lo hace del estadístico desviación estándar. En la Figura 4.13 y Figura 4.14
se observa esta dinámica en el entrenamiento y en la observación del sistema
respectivamente.
48
Figura 4.12. Estadístico desviación estándar acumulada para t instantes de tiempo.
Figura 4.13. Respuesta del sistema complejo y el modelo propuesto para diferentes
instantes de tiempo.
49
Figura 4.14. Respuesta del sistema complejo y el modelo propuesto para diferentes
instantes de tiempo.
En la Figura 4.15 se muestra la respuesta en el tiempo del estadístico desviación estándar
acumulada del sistema complejo y del modelo propuesto con el mejor individuo obtenido.
Se quiere comprobar la respuesta del modelo para instantes de tiempo más allá de los
utilizados para entrenar y observar el sistema y ver su comportamiento. En líneas punteadas
se tiene la respuesta del estadístico para instantes de tiempo t entre (500,1000].
El error va disminuyendo con el tiempo hasta llegar cerca a cero, el estadístico del modelo
propuesto inicialmente toma valores grandes con respecto al sistema complejo, pero este
empieza a descender hasta que alcanzar el valor del sistema complejo. Este comportamiento
es el observado en el sistema y fue el método para obtener el mejor individuo. Al seguir en
el tiempo, se puede apreciar como el estadístico del modelo propuesto sigue disminuyendo
hasta llegar casi a cero y el estadístico del sistema complejo aumenta. El error para los
instantes de tiempo mayor a 500 es positivo y sigue aumentando. El porcentaje de error para
el instante de tiempo t=1000 es de 14%.
50
Figura 4.15. Estadístico desviación estándar acumulada en t instantes de tiempo.
Estadístico Coeficiente de correlación.
El porcentaje de error de los experimentos realizados para el estadístico coeficiente de
correlación, mostraron un error superior al 100% en la mayoría de los casos. Estos
porcentajes hacen que sea el estadístico con el peor comportamiento al momento de
modelarlo con el autómata celular no uniforme propuesto. El mejor individuo se obtuvo para
un FIS de 2 reglas con un porcentaje de error de 125.85%.
Tabla 4.8. Estadística de los experimentos realizados para el estadístico coeficiente de
correlación.
51
En la Tabla 4.8 se puede observar los resultados estadísticos de los experimentos realizados
para 2, 4 y 8 reglas para el coeficiente de correlación. Estos porcentajes son altos debido a
que el coeficiente de correlación indica un grado de correlación lineal entre dos señales en el
tiempo [referencia] y dada la función de rendimiento implementada, el autómata celular no
uniforme propuesto no logra emerger el comportamiento de este estadístico con los
parámetros utilizados en el algoritmo genético.
El mejor resultado de la media y desviación estándar se obtuvieron con 8 reglas, con un
porcentaje de error de 400.52% y 88.17% respectivamente. La media para los tres casos
estuvo alrededor de 400%, y la desviación estándar es alta para 2 reglas comparándolas con
4 y 8 reglas. Esto muestra que los porcentajes de error fueron uniformes para 4 y 8 reglas, a
pesar que con 2 reglas se obtuvo el mejor individuo.
Figura 4.16. Histograma de resultados experimentos para un FIS de 2 reglas para el
error en la observación del sistema.
En la Figura 4.16 se puede observar la distribución de los porcentajes de error de los
experimentos realizados con el estadístico coeficiente de correlación. Esta distribución es
parecida a una campana de gauss, donde la mayor concentración es aproximada a la media
de los experimentos realizados para 2 reglas.
Teniendo el mejor individuo en la observación del sistema, se observó el comportamiento en
el entrenamiento para cada generación del algoritmo genético para la función de rendimiento.
En la Figura 4.17 se puede ver como el error va disminuyendo sin tener saltos abruptos como
sucede con los estadísticos promedio y desviación estándar. Al cabo de 100 generaciones el
error es de 3.10.
52
Figura 4.17. Error de entrenamiento para el estadístico Coeficiente de correlación.
Figura 4.18. Estadístico coeficiente de correlación acumulado en t instantes de tiempo.
El promedio de los coeficientes de correlación de cada celda entre el sistema complejo y el
autómata celular no uniforme propuesto en cada instante de tiempo se puede observar en la
Figura 4.18 para el entrenamiento. Los dos primeros valores son cero, dado que no se tenían
53
los suficientes instantes de tiempo para poder obtener el coeficiente de correlación. En los
primeros instantes el coeficiente de correlación llega a un máximo valor de 0.6, después
empieza a descender para llegar a un mínimo de aproximadamente 0.23. A partir de este
instante de tiempo, que es cercano a t=20, el promedio del estadístico empieza a aumentar
para intentar obtener un coeficiente de correlación igual a uno. De esta forma habría una
correlación lineal entre el sistema complejo y el autómata celular no uniforme propuesto.
Figura 4.19. Estadístico coeficiente de correlación acumulado en t instantes de tiempo.
En la Figura 4.19 se muestra el comportamiento del estadístico coeficiente de correlación en
la observación del sistema. Igual que en el caso anterior, los primeros dos instantes de tiempo
su valor es cero. Al cabo de este tiempo, se obtiene un valor máximo de aproximadamente
0.51 en los primeros instantes de tiempo. Este valor se estabiliza en 0.337, después de tener
un valor mínimo de 0.271.
Para este estadístico que no logra emerger el autómata celular no uniforme propuesto, la
respuesta en el tiempo es muy diferente a la del sistema complejo. Se puede observar más
detalles con respecto al diseño y distribución de las celdas del autómata celular no uniforme.
En la Figura 4.20 y Figura 4.21 se muestra el comportamiento del sistema complejo y del
autómata celular no uniforme propuesto para diferentes instantes de tiempo en el
entrenamiento y en la observación del sistema respectivamente.
54
Figura 4.20. Respuesta del sistema complejo y el modelo propuesto para diferentes
instantes de tiempo.
Figura 4.21. Respuesta del sistema complejo y el modelo propuesto para diferentes
instantes de tiempo.
Con el mejor individuo obtenido se realizó una prueba para instantes de tiempo t mayor a
200, y ver el comportamiento del estadístico coeficiente de correlación. En la Figura 4.22 se
puede observar el comportamiento del estadístico cuando el instante de tiempo es t>200 en
líneas punteadas.
55
Dado el error que se obtuvo con el autómata celular no uniforme propuesto, este coeficiente
alcanza su máximo valor para el instante de tiempo t = 200 de 0.337, a partir de este punto
empieza a descender hasta llegar a 0.17 para t = 1000. A diferencia de los estadísticos
promedio y desviación estándar, el coeficiente de correlación no logra ser reproducido por el
autómata celular no uniforme con los parámetros de diseño establecidos.
Figura 4.22. Estadístico coeficiente de correlación acumulado en t instantes de
tiempo.
Estadísticos promedio y desviación estándar.
Como se ha mencionado anteriormente, esta función de rendimiento toma la diferencia entre
el sistema complejo y el modelo propuesto de los estadísticos promedio y desviación
estándar. Al multiplicar las diferencias de cada estadístico se ha obtenido que el mejor
resultado de los experimentos, se presentó para un FIS de 4 reglas. En la Tabla 4.9 se observa
el porcentaje de error para el mejor individuo en la observación del sistema, el cual es de
0.010%. Frente a los porcentajes de error para 2 y 8 reglas, 0.048% y 0.244%
respectivamente, el error con 4 reglas es aproximadamente 4 veces menor para un FIS de 2
reglas y 24 veces menor para un FIS de 8 reglas.
56
Tabla 4.9. Estadística de los experimentos realizados para el estadístico promedio y
desviación estándar.
De igual forma todos los porcentajes de error para el mejor individuo en la observación del
sistema para todas las reglas es menor a 1%.
En la Tabla 4.9 se observa que la mejor media se obtuvo con 2 reglas con un porcentaje de
13.92%, en las demás reglas este porcentaje aumenta considerablemente con respecto a la
mejor media obtenida. En una proporción de 6,4 y 11,10 para 2 y 8 reglas respectivamente.
Dada la desviación estándar de los experimentos para todas las reglas, se puede decir que no
hubo tanta uniformidad en los resultados de los experimentos como en el caso de sólo el error
del promedio.
En la Figura 4.23 se muestra el histograma para el error de observación del sistema de los
experimentos realizados para el número de reglas que tuvo el mejor individuo, en este caso
4 reglas. Se puede observar que la mayoría de experimentos tuvieron errores pequeños, por
lo tanto la media es de aproximadamente 13%. Los errores en el extremo derecho permitieron
que la desviación estándar aumentara.
En la Figura 4.24 se muestra el valor de la función de rendimiento para los estadísticos de
promedio y desviación estándar en el entrenamiento, para cada generación del algoritmo de
evolución diferencial. Se puede observar como el error disminuye rápidamente alrededor de
la décima generación a 0.0208 aproximadamente y después de la generación 20 cae a un
valor de 0.0002.
Dadas las condiciones iniciales aleatorias para los genes de la población inicial, se obtuvieron
condiciones que permitieron que el error inicial fuera de aproximadamente 17% con respecto
al valor máximo obtenido en la base de datos.
57
Figura 4.23. Histograma resultado experimentos en la observación del sistema para un
FIS de 4 reglas.
Figura 4.24. Error entrenamiento para la función de rendimiento
Como la función de rendimiento está dada por dos estadísticos, en la Figura 4.25 se muestra
el comportamiento para el estadístico promedio del sistema complejo, del modelo propuesto
y el error entre ambos estadísticos. En la parte superior se tiene el comportamiento en el
58
entrenamiento, donde se puede ver que el promedio del sistema propuesto es cercano a cero,
este valor está alrededor de 0.005 para el instante de tiempo t>100. Un comportamiento muy
diferente con respecto al primer experimento, donde se hizo el análisis con este mismo
estadístico y el modelo propuesto lograba acercarse al estadístico promedio del sistema
complejo. Por lo tanto el error es similar al estadístico promedio del sistema complejo.
Figura 4.25. Respuesta estadístico promedio acumulado para t instantes de tiempo.
En la parte inferior se tiene el comportamiento del estadístico promedio en la observación
del sistema. En esta parte el error es similar al promedio del sistema complejo.
Figura 4.26. Respuesta estadístico desviación estándar acumulada para t instantes de tiempo.
59
El estadístico desviación estándar se muestra en la Figura 4.26 y de forma general se puede
apreciar que tiene un comportamiento similar al experimento realizado únicamente con este
estadístico. En la parte superior se encuentra la desviación estándar del sistema complejo, el
modelo propuesto y el error entre ambos estadísticos en el entrenamiento. El estadístico del
modelo propuesto al pasar el tiempo logra acercarse al estadístico del sistema complejo, por
lo tanto el error tiende a cero.
En la parte inferior se tiene el comportamiento del estadístico en la observación del sistema
para el sistema complejo, el modelo propuesto y el error. La desviación estándar del modelo
propuesto es parecida a la del sistema complejo y nuevamente el error es cercano a cero,
alrededor de 0.0012.
Figura 4.27. Respuesta error estadísticos promedio y desviación estándar para t instantes de
tiempo.
El comportamiento de la función de rendimiento con dos estadísticos, promedio y desviación
estándar, estuvo acondicionada por la desviación estándar, el promedio no aportó a la
reducción del error. En la Figura 4.27 se aprecia el error de promedio, desviación estándar y
de función de rendimiento. En la parte superior, en el entrenamiento, el error del promedio
es creciente y similar al promedio del sistema complejo, y el error de la desviación estándar
en valor absoluto empieza a disminuir acercándose a cero. La función de rendimiento para
los instantes de tiempo t mayor a 200 empieza a tener el comportamiento del error de
desviación estándar. En la parte inferior, en la observación del sistema el comportamiento es
igual que en el entrenamiento.
En las Figura 4.28 y Figura 4.29 se muestra el comportamiento para diferentes instantes de
tiempo en el entrenamiento y en la observación del sistema respectivamente. De nuevo se
aprecia que el modelo propuesto no logra reproducir el comportamiento temporal del sistema
60
complejo pero sí estadísticamente el promedio y la desviación estándar. Aunque en este caso
específico la desviación estándar es el factor dominante.
Figura 4.28. Respuesta del sistema complejo y el modelo propuesto para diferentes
instantes de tiempo.
Figura 4.29. Respuesta del sistema complejo y del modelo propuesto para diferentes
instantes de tiempo.
61
Figura 4.30. Respuesta del error de los estadísticos promedio, desviación estándar y la
función de rendimiento para t instantes de tiempo.
Por último se desea observar si el modelo propuesto logra mantener su comportamiento para
instantes de tiempo mayor a 500. En la Figura 4.30 se muestra en líneas punteadas el error
del estadístico promedio, desviación estándar y la función de rendimiento para t>500. El error
del promedio permanece igual, siendo alto en comparación con el error de desviación
estándar, el cual es similar a la función de rendimiento. En términos porcentuales el error de
desviación estándar es de 3.11% para t = 1000 y el error de la función de rendimiento es
1.80% para t = 1000. En ambos casos el error es pequeño dado los porcentajes obtenidos con
respecto al mayor valor obtenido del sistema complejo en el activador.
La respuesta de cada estadístico, promedio y desviación estándar se pueden observar en la
Figura 4.31 para instantes de tiempo t mayor a 500. En la parte superior el error del estadístico
promedio se comporta de forma similar al promedio del sistema complejo. Esto es constante
cuando t es mayor de 500. El promedio del modelo propuesto sigue siendo cercano a cero.
En la parte inferior, cuando t es mayor que 500 la desviación estándar del sistema complejo
sigue creciendo, mientras que la desviación estándar del modelo propuesto disminuye. Para
t=1000, el valor de desviación estándar para el sistema complejo es de 0.1923, para el modelo
propuesto es de 0.1058 y el porcentaje de error 3.11% como ya se había mencionado antes.
62
Figura 4.31. Respuesta estadísticos promedio y desviación estándar acumulados para t
instantes de tiempo.
Estadísticos promedio, desviación estándar y coeficiente de correlación.
En esta sección se muestra el resultado de los experimentos al combinar tres estadísticos, de
los cuales, por sí solos se obtuvieron resultados satisfactorios en el caso del promedio y la
desviación estándar. Para el coeficiente de correlación no se logró emerger este estadístico
en el autómata celular no uniforme propuesto con un porcentaje de error que fuera menor al
10%. Para este caso, donde se combinan los tres estadísticos, se obtuvieron porcentajes de
error menor al 1% para el mejor individuo con un FIS de 2 y 4 reglas. El mejor individuo
tiene un porcentaje de error de 0.15% y se obtuvo con un FIS de 2 reglas. En la Tabla 4.10
se muestran las estadísticas de los porcentajes de error obtenidos de los experimentos.
Tabla 4.10. Resultados estadísticos de los experimentos realizados para los estadísticos
promedio, desviación estándar y coeficiente de correlación.
63
Para un FIS de 4 reglas se obtuvo un porcentaje de error de 0.157% para el mejor individuo,
teniendo una diferencia de 0.007% con respecto a mejor individuo de todos los experimentos.
En el caso de un FIS de 8 reglas el porcentaje de error supera ampliamente al mejor individuo,
34.09%. La mejor media y desviación estándar se obtuvieron con un FIS de 2 reglas, 30.28%
y 81.56% respectivamente.
Por otro lado los porcentajes de error de la media y desviación estándar son los más altos
porcentajes obtenidos de los experimentos realizados con el sistema complejo Reacción –
Difusión para 4 y 8 reglas. Esto sugiere que a mayor cantidad de estadísticos se intenten
emerger en el autómata celular no uniforme, se tiene un aumento en los experimentos del
porcentaje de error mayor a 100%.
Figura 4.32. Histograma de resultados de experimentos para un FIS de 2 reglas para el
error en la observación del sistema.
En la Figura 4.32 se observa el histograma de los experimentos para el error en la observación
del sistema para un FIS de 2 reglas, número de reglas en las cuales se obtuvo el mejor
individuo; La mayoría de experimentos obtuvieron porcentajes de error menores al 15%
aproximadamente y se concentran en un porcentaje menor del 100%. Fueron pocos los
experimentos que presentaron resultados arriba del 100%, pero igual afectan en la media y
desviación estándar.
64
Figura 4.33. Error de entrenamiento para la función de rendimiento con tres estadísticos.
A diferencia de tener sólo el estadístico de coeficiente de correlación, donde el error de
entrenamiento disminuía lentamente, combinando los tres estadísticos se observa en la Figura
4.33 que este error disminuye rápidamente, siguiendo un patrón similar a los estadísticos
promedio y desviación estándar. A pesar de que el error inicial es de 5.25, al cabo de 21
generaciones el error es de 0.068. El error final de entrenamiento es de 0.01046 para 100
generaciones.
Figura 4.34. Estadístico promedio acumulado en t instantes de tiempo.
65
En la Figura 4.34 se observa el comportamiento para el estadístico promedio del sistema
complejo, el modelo propuesto y el error entre ambos estadísticos. En la parte superior se
encuentra el estadístico para el entrenamiento y en la parte inferior para la observación del
sistema. El estadístico promedio para el modelo propuesto tiene un comportamiento que no
permite emerger este estadístico de la misma forma como lo hace en el sistema complejo. El
promedio en la parte final del entrenamiento es de 0.06 y para la observación del sistema
0.02.
Por otro lado, el modelo propuesto logra emerger el estadístico desviación estándar de forma
similar que en el sistema complejo. En la Figura 4.35 se observa el comportamiento para el
estadístico desviación estándar del sistema complejo, el modelo propuesto y el error entre
ambos estadísticos. En el entrenamiento, parte superior, a medida que pasa el tiempo, el
modelo propuesto intenta igualar el estadístico desviación estándar del sistema complejo. En
la observación del sistema la desviación del sistema complejo y del modelo propuesto son
parecidas y el error es cercano a cero.
Figura 4.35. Estadístico desviación estándar acumulada en t instantes de tiempo.
Para el caso del estadístico coeficiente de correlación entre el sistema complejo y el modelo
propuesto se puede observar que éste no logra emerger en el modelo propuesto. En vez de
tener una tendencia hacia uno, ésta disminuye con el paso del tiempo. En la Figura 4.36 en
la parte superior se tiene el comportamiento para el coeficiente de correlación en el
entrenamiento y en la parte inferior en la observación del sistema. Para ambos casos el
comportamiento del coeficiente de correlación es similar, tiene un aumento considerable y
después empieza a disminuir.
66
Aunque en los instantes iniciales el coeficiente de correlación puede ser alto debido a los
pocos datos que se están evaluando. Cuando se evaluó solamente éste estadístico llegó a un
punto mínimo donde a partir de éste empezó a aumentar lentamente.
Figura 4.36. Estadístico coeficiente de correlación acumulado en t instantes de tiempo.
Figura 4.37. Respuesta error estadísticos promedio, desviación estándar y
coeficiente de correlación para t instantes de tiempo.
67
Observando el error de cada estadístico en la Figura 4.37, donde en la parte superior se
encuentra el comportamiento para el entrenamiento y en la parte inferior para la observación
del sistema. El error para el estadístico coeficiente de correlación es el más alto de los tres
estadísticos, seguido del error de promedio y por último el error de desviación estándar.
Teniendo en cuenta que la función de rendimiento multiplicaba estos errores, y el error de
desviación estándar fue el que obtuvo mejor comportamiento, se puede ver en la Figura 4.37
como la función de rendimiento tiene un comportamiento parecido al error de desviación
estándar.
Como se ha venido presentando en los anteriores experimentos, el comportamiento en el
tiempo del modelo propuesto no coincide con el sistema complejo. En la Figura 4.38 y Figura
4.39 se muestra el comportamiento temporal para el entrenamiento y la observación del
sistema respectivamente. En la parte superior de cada imagen, se tiene el comportamiento
para el sistema complejo y en la parte inferior para el modelo propuesto para diferentes
instantes de tiempo.
Figura 4.38. Respuesta del sistema complejo y el modelo propuesto para diferentes instantes
de tiempo.
Para observar el comportamiento del modelo propuesto en instantes de tiempo mayor a 200,
se toma el mejor individuo obtenido en los experimentos y se realiza la simulación hasta
llegar a t=1000. En la Figura 4.40 se muestra el error del estadístico promedio, desviación
estándar y la función de rendimiento, el error para el coeficiente de correlación no se muestra
dado que su valor es mayor que los demás errores, no permite observar de una mejor forma
la función de rendimiento.
Para este caso la función de rendimiento no tiene alguna tendencia con respecto al error de
promedio, desviación estándar o coeficiente de correlación. Como se observó cuando se hizo
el experimento con el estadístico promedio y desviación estándar. Se podría decir que a pesar
de que se divide el error del promedio y de la desviación estándar por el error del coeficiente
68
de correlación, este tiene una incidencia sobre el resultado de la función de rendimiento
considerable. El porcentaje de error para el instantes de tiempo t=1000 de la función de
rendimiento es de 46.54%, para el promedio de 20.41%, de la desviación estándar de 2.93%
y del coeficiente de correlación de 962.83% con respecto al máximo valor del sistema
complejo en el activador.
Figura 4.39. Respuesta del sistema complejo y el modelo propuesto para diferentes
instantes de tiempo.
Figura 4.40. Respuesta error de los estadísticos promedio, desviación estándar y la función
de rendimiento para t instantes de tiempo.
69
En la Figura 4.41 se observa la respuesta de cada estadístico del sistema complejo y del
modelo propuesto. Con respecto al error del promedio este se va acercando al promedio del
sistema complejo a medida que t se acerca a 1000. La desviación estándar del sistema
complejo sigue aumentando y la del modelo propuesto a descender, aunque se mantiene un
porcentaje de error bajo, 2.93%. El error del coeficiente de correlación sigue aumentando
teniendo un porcentaje de error alto, lo que lleva a proponer que el modelo propuesto no logra
reproducir este estadístico.
Figura 4.41. Estadísticos promedio, desviación estándar y coeficiente de correlación
acumulados en t instantes de tiempo.
4.4.2 Onda Reactiva.
Para este sistema complejo los resultados obtenidos para los mejores individuos estuvieron
en su mayoría por debajo del 1%. Solamente cuando se calculó el error de los estadísticos
promedio y desviación estándar para 8 reglas, el error en la observación del sistema dio
26.67%.
Estadístico Promedio.
El resultado de los experimentos para el estadístico de promedio se pueden observar en la
Tabla 4.11. Estos valores reflejan el error o la diferencia entre el estadístico promedio del
sistema complejo Onda reactiva y el valor obtenido con el modelo propuesto sobre el máximo
valor que se obtiene del sistema complejo. Los porcentajes obtenidos para los mejores
70
individuos en el entrenamiento y la observación del sistema son en su mayoría menores a
1%. Esto sugiere que el modelo logra reproducir en gran medida este estadístico.
Tabla 4.11. Resultados estadísticos de los experimentos realizados para calcular el
estadístico promedio.
El mejor individuo tuvo un porcentaje de error de 0.007%, esto se presentó para un FIS de 2
reglas en la observación del sistema. Comparando el mejor individuo para 4 reglas, se tiene
una diferencia significativa, ya que el mejor tuvo un error de 231 veces mayor y para 8 reglas
de 28 veces más grande aproximadamente.
En cuanto a la media el mejor resultado se obtuvo con un FIS de 8 reglas, con un porcentaje
de error en la media de todos los experimentos de 30.63%. Con respecto para un FIS de 2
reglas este error es aproximadamente 2.39 veces mayor y para 4 reglas de 2.23 veces mayor.
Para la desviación estándar el mejor resultado se obtuvo con un FIS de 4 reglas con un
porcentaje de error de 64.98%. Para un FIS de 2 reglas este porcentaje de error es 2 veces
mayor aproximadamente y para 8 reglas es 1.4 veces mayor. Observando los resultados
estadísticos, se tiene que el mejor individuo de todos los experimentos se presentó para un
FIS de 2 reglas, pero la media y la desviación estándar fueron las más grandes con respecto
a los demás experimentos. Es un hecho curioso dado que en la mayoría de experimentos
realizados, generalmente el mejor individuo tiene la mejor media y desviación estándar.
71
Figura 4.42. Histograma de resultados de experimentos para un FIS de 2 reglas para el
error en la observación del sistema.
En la Figura 4.42 se muestra el histograma de los resultados del porcentaje de error para los
diferentes experimentos que se realizaron para un FIS de 2 reglas, para el estadístico
promedio. Se puede apreciar que la mayoría de experimentos tienen un porcentaje de error
menor al 50% aproximadamente. Los porcentajes de error cercanos a 600% y 1200%
provocaron que la desviación estándar y la media fueran grandes, a pesar de que hayan sido
sólo un experimento por cada error.
En la Figura 4.43 se observa el error de entrenamiento para cada generación del mejor
individuo obtenido en la observación del sistema complejo. El porcentaje de error es de
0.0015%. Se puede apreciar que dadas las condiciones iniciales aleatorias del gen del
individuo, el error entre el promedio del sistema complejo y el modelo propuesto es de
aproximadamente 0.12.
72
Figura 4.43. Error de entrenamiento para la función de rendimiento.
Figura 4.44. Estadístico promedio acumulado en t instantes de tiempo.
En la Figura 4.44 se tiene la respuesta del estadístico promedio para el sistema complejo, el
modelo propuesto y el error en el entrenamiento. Se puede apreciar como el promedio del
modelo propuesto se va acercando al promedio del sistema complejo. Este comportamiento
es similar a una respuesta de un sistema de primer orden.
73
Figura 4.45. Estadístico promedio acumulado en t instantes de tiempo.
En la Figura 4.45 se aprecia la respuesta del estadístico promedio para el sistema complejo y
el modelo propuesto en la observación del sistema, de igual forma el comportamiento del
error en cada instante de tiempo. A diferencia de la respuesta obtenida en la Figura 4.44 al
final se disminuye la diferencia entre ambos estadísticos. El comportamiento del estadístico
del modelo propuesto viene de un valor mayor para luego ser negativo y empezar a aumentar
para lograr igualar el promedio del sistema complejo.
Figura 4.46. Estadístico promedio acumulado en t instantes de tiempo.
74
En la Figura 4.46 se muestra el estadístico promedio acumulado en cada instante de tiempo
para el sistema complejo inicial con 200 instantes de tiempo, así como el modelo propuesto
obtenido después de realizar la sintonización con el algoritmo evolutivo. En líneas punteadas
se tiene la respuesta obtenida del modelo propuesto en un intervalo de (200,1000] en el
tiempo.
Se observa que para el instante de tiempo t = 200 el sistema complejo y el modelo tiene casi
la misma respuesta, al cabo de un tiempo, el promedio acumulado del modelo empieza a
alejarse de la respuesta del sistema complejo hasta llegar a un pico máximo de 2.08, este
sobre impulso es de un 30% aproximadamente con respecto al valor de establecimiento del
promedio acumulado del sistema complejo.
Este tipo de respuesta es similar a la respuesta en el tiempo de un sistema de segundo orden.
En el instante de tiempo t=600 la respuesta del modelo empieza a oscilar con un menor
porcentaje en los sobre impulsos alrededor del estadístico del sistema complejo.
La respuesta en el tiempo del sistema complejo y el modelo propuesto no tiene la misma
respuesta, a pesar de que el estadístico en ambos casos es similar, esto no se ve reflejado de
forma cualitativa en el comportamiento a través del tiempo. En la Figura 4.47 se tiene la
respuesta para diferentes instantes de tiempo para el sistema complejo, parte superior, y para
el modelo propuesto, parte inferior.
Figura 4.47. Respuesta del sistema complejo y el modelo propuesto para diferentes
instantes de tiempo.
Como se puede observar, ambas secuencias de imágenes tomadas para los mismos instantes
de tiempo, presentan diferencias entre el comportamiento de la una con respecta a la otra.
Este hecho se puede explicar dado que se tomó como función de observación, de rendimiento,
un estadístico, para este caso, el estadístico promedio de la respuesta del sistema complejo
75
histórico, o en su defecto, hasta cierto instante de tiempo. Dadas las propiedades matemáticas
de este estadístico, y la forma de evaluarlo en el autómata celular, se puede tener una variedad
de respuestas en el tiempo que cumplan con la condición de que el promedio sea igual al del
sistema complejo.
Figura 4.48. Respuesta del sistema complejo y el modelo propuesto para diferentes
instantes de tiempo.
Figura 4.49. Promedio para cada instante de tiempo del sistema complejo y el modelo
propuesto.
76
En la Figura 4.48 se observa el comportamiento del sistema complejo y del modelo propuesto
en la etapa de observación del sistema para los mismos instantes de tiempo. Al igual que en
la Figura 4.47 el comportamiento entre ambos autómatas es diferente. En el sistema complejo
para un autómata de 10x10 ya toma un comportamiento estable, en cambio en el modelo no
se observa un comportamiento similar.
En la Figura 4.49 se muestra el estadístico promedio para cada instante de tiempo para el
sistema complejo Onda reactiva y el autómata celular obtenido. En la parte superior se
encuentra la dinámica de este estadístico en el entrenamiento y en la parte inferior, en la etapa
de observación del sistema. Se puede apreciar que mientras el promedio para cada instante
de tiempo no varía de forma irregular en el sistema complejo, en el autómata celular presenta
variaciones significativas con respecto al instante de tiempo inmediatamente anterior.
Estadístico desviación estándar.
Los resultados de los experimentos realizados para la desviación estándar presentaron
porcentajes de error menor al 1% para el mejor individuo tanto en el entrenamiento como en
la observación del sistema para todas las reglas implementadas. El mejor individuo se
presentó con un FIS de 4 reglas con un porcentaje de error de 0.00084%. Un porcentaje de
error mucho menor que el obtenido con el estadístico promedio el cual fue de 0.0049%.
En la Tabla 4.12 se tiene el resultado estadístico de los experimentos realizados para un FIS
2, 4 y 8 reglas. En el entrenamiento los mejores resultados se presentaron con 2 reglas, ya en
la observación del sistema se presentaron con 4 reglas.
Tabla 4.12. Estadística de los experimentos realizados para el estadístico desviación
estándar.
Los porcentajes de error para la media son aceptables para 2 y 4 reglas ya que no superan el
10%, cosa contraria pasa con 8 reglas donde el porcentaje de error es cercano al 50%. La
desviación tiene un porcentaje de 5.1% para 4 reglas, y basados en la media, definitivamente
el modelo propuesto tiene buenos resultados con este FIS. La desviación estándar con 2 y 8
77
reglas sugiere que varios experimentos presentaron porcentajes de error alejados de la media,
y empeora el caso para 8 reglas.
Figura 4.50. Histograma resultado experimentos en la observación del sistema para
un FIS de 4 reglas.
La distribución de los porcentajes de error de la observación del sistema de los experimentos
realizados se presenta en la Figura 4.50. Como se puede observar la mayoría de experimentos
obtuvieron un porcentaje de error menor al 10%.
El error para cada generación en el entrenamiento del mejor individuo se muestra en la Figura
4.51. Este error desciende rápidamente, antes de la décima generación, a un valor de 0.081 y
se estabilice en 0.001.
El comportamiento del estadístico desviación estándar en el sistema complejo, en el modelo
propuesto y el error en el entrenamiento se pueden observar en la Figura 4.52. La desviación
estándar va aumentando y la desviación estándar del modelo propuesto desciende para logra
igualarse con la del sistema complejo. El error se va acercando a cero y para t=180 el
porcentaje de error es 0.2%.
Par el caso de la observación del sistema, en la Figura 4.53 la desviación del modelo
propuesto tiene un comportamiento similar a un sistema de primer orden, y se acerca al valor
de la desviación estándar del sistema complejo. El error aumenta pero después tiende a cero.
78
Figura 4.51. Error entrenamiento para la función de rendimiento.
Figura 4.52. Estadístico desviación estándar acumulada en t instantes de tiempo.
79
Figura 4.53. Estadístico desviación estándar acumulada en t instantes de tiempo.
El modelo propuesto no logra reproducir el comportamiento temporal del sistema complejo,
pero sí logra reproducir el comportamiento del estadístico desviación estándar al pasar el
tiempo. En la Figura 4.54 y Figura 4.55 se realiza la comparación en el entrenamiento y
observación del sistema para unos instantes de tiempo entre el sistema complejo y el modelo
propuesto respectivamente.
Para comprobar el comportamiento del modelo propuesto se realiza una simulación para unos
instantes de tiempo t = 1000. En líneas punteadas se muestra el error del estadístico
desviación estándar, la desviación estándar del sistema complejo y del modelo propuesto. En
la Figura 4.56 se observa como el error va disminuyendo junto con el valor de desviación
estándar del sistema complejo. Para el instante de tiempo t=1000 el porcentaje de error es de
5.08%. Dependiendo del caso, se podría decir que este error es tolerable para este instante de
tiempo.
80
Figura 4.54. Respuesta del sistema complejo y el modelo propuesto para diferentes
instantes de tiempo.
Figura 4.55. Respuesta del sistema complejo y el modelo propuesto para diferentes
instantes de tiempo.
81
Figura 4.56. Estadístico desviación estándar acumulada en t instantes de tiempo.
Estadístico Coeficiente de correlación.
Los experimentos realizados mostraron un comportamiento similar al del sistema complejo
Reacción – Difusión, donde el porcentaje de error es mayor del 100% para los mejores
individuos de cada regla. En la Tabla 4.13 se muestran los porcentajes de error para la función
de rendimiento a los FIS de 2, 4 y 8 reglas. El mejor individuo se presentó con un FIS de 8
reglas con un porcentaje de error de 144.82%. En resumen el FIS de 8 reglas tiene los mejores
resultados con respecto a 2 y 4 reglas.
Tabla 4.13. Estadística de los experimentos realizados para el estadístico coeficiente de
correlación.
82
El porcentaje de error de la media para todas las reglas es alto entre 240% y 340% y la
desviación entre el 54% y 132%. Con estos resultados y los obtenidos con el sistema
complejo de Reacción – Difusión se puede proponer que el estadístico coeficiente de
correlación no es un buen estadístico para lograr reproducirlo en el modelo propuesto. Se
debe entrar a mirar otros diseños para un autómata celular no uniforme.
Figura 4.57. Histograma de resultados experimentos para un FIS de 8 reglas para el error
en la observación del sistema.
La distribución de los porcentajes de error para los experimentos realizados tiene un
comportamiento parecido a la campana de gauss, esta distribución también es similar a los
resultados obtenidos con el sistema complejo Reacción – Difusión. Con el histograma se
confirma que la media está alrededor de 240%.
El error de entrenamiento para el mejor individuo tiene forma de escalera donde alrededor
de 40 generaciones le toma al individuo en tener un valor de 2.303. Aumentando el número
de generaciones el error se puede reducir, pero comparando con los estadísticos promedio y
desviación estándar el coeficiente de correlación se queda corto. En la Figura 4.58 se muestra
el comportamiento que se obtuvo.
El promedio de los coeficientes de correlación de cada celda entre el sistema complejo y el
modelo propuesto para cada instante de tiempo se puede ver en la Figura 4.59 para el
entrenamiento. Después de tener un valor mínimo alrededor de 0.18 aumentó hasta 0.57
aproximadamente y comenzó a descender hasta llegar a 0.42 al final del entrenamiento.
Para el caso de la observación del sistema, el coeficiente de correlación tiene oscilaciones
que con el paso del tiempo van disminuyendo y el coeficiente está aumentando. El valor del
coeficiente termina en 0.34.
83
Figura 4.58. Error de entrenamiento para el estadístico Coeficiente de correlación.
Figura 4.59. Estadístico coeficiente de correlación acumulado en t instantes de tiempo.
84
Figura 4.60. Estadístico coeficiente de correlación acumulada en t instantes de tiempo.
El modelo propuesto no logra reproducir el estadístico coeficiente de correlación con las
condiciones de diseño del autómata celular no uniforme y del algoritmo de evolución
diferencial. En el tiempo, al igual que con los demás estadísticos no logra tener el
comportamiento del sistema complejo. En la Figura 4.61 y Figura 4.62 se muestra para los
mismos instantes de tiempo en el entrenamiento y observación del sistema la respuesta en el
tiempo del sistema complejo y el modelo propuesto respectivamente.
Figura 4.61. Respuesta del sistema complejo y el modelo propuesto para diferentes
instantes de tiempo.
85
Figura 4.62. Respuesta del sistema complejo y el modelo propuesto para diferentes
instantes de tiempo.
Se realiza una prueba para ver el comportamiento del modelo propuesto con el mejor
individuo hasta el instante de tiempo t=1000. En la Figura 4.63 se puede observar en líneas
punteadas cuando los instantes de tiempo son mayores a 200. El comportamiento del
estadístico coeficiente de correlación empieza a disminuir hasta 0.001 aproximadamente
alrededor de t = 380, luego tiene un leve aumento pero vuelve a decrecer. Para instantes de
tiempo mayor a 200, el coeficiente de correlación muestra como el modelo propuesto es
incapaz siquiera de mantener o intentar reproducir un comportamiento lineal con el sistema
complejo.
Figura 4.63. Estadístico coeficiente de correlación acumulado en t instantes de tiempo.
86
En el caso del sistema de Reacción – Difusión el coeficiente disminuía pero no a la misma
velocidad con que lo hizo el sistema de Onda reactiva, se podría decir que el modelo
propuesto tiene un comportamiento más lineal con el sistema Reacción – Difusión.
Estadístico promedio y desviación estándar.
Los resultados obtenidos de los experimentos realizados, mostraron el mejor individuo para
un FIS de 2 reglas con un porcentaje de error en la observación del sistema de 0.080%.
Comparando el mejor individuo para un FIS de 4 reglas, éste es 6.18 veces mayor y en el
caso de un FIS de 8 reglas 333.3 veces mayor. En la Tabla 4.14 se muestran los resultados
estadísticos obtenidos de los experimentos realizados.
Tabla 4.14. Resultado estadístico de los experimentos realizados para los estadísticos
promedio y desviación estándar.
Como ha sido la tendencia en los diferentes tipos de experimentos realizados, los mejores
resultados en la media y desviación estándar se presentaron para el FIS con el mejor
individuo. En esta caso específicamente, la media para 4 reglas es 4.63 veces mayor y para 8
reglas es 3.28 veces mayor. Otra característica de la media para todas las reglas es que ésta
supera el 100% en el porcentaje de error.
En la Figura 4.64 se muestra el histograma de los porcentajes de error obtenidos de los
experimentos realizados para un FIS de 2 reglas en la observación del sistema. La mayoría
de experimentos tuvieron bajos porcentajes de error, dada la distribución del histograma, se
puede decir que la mayoría de experimentos tienen un error menor del 30%. Al tener
experimentos que obtuvieron un porcentaje de error cerca de 2500% y 3000%, modificaron
la media y la desviación estándar.
87
Figura 4.64. Histograma resultado experimentos para el error en la observación del sistema
para FIS de 2 reglas.
Figura 4.65. Error de entrenamiento para la función de rendimiento.
Como se puede observar en la Figura 4.65, el error entre los estadísticos promedio y
desviación estándar entre el sistema complejo y el modelo propuesto disminuye
considerablemente al cabo de 20 generaciones. Este es el comportamiento obtenido para el
mejor individuo obtenido en la observación del sistema en el entrenamiento.
88
Figura 4.66. Respuesta estadístico promedio acumulado para t instantes de tiempo.
En la Figura 4.66 se muestra el promedio acumulado en t instantes de tiempo para el sistema
complejo y el modelo propuesto. En líneas punteadas se tiene el comportamiento del error o
diferencia entre ambos estadísticos. En la parte superior se encuentra el comportamiento del
estadístico acumulado en entrenamiento y en la parte inferior en la observación del sistema.
Se puede observar que el estadístico promedio en el autómata celular propuesto tiene
pequeñas variaciones en el entrenamiento y está cerca de cero. Su promedio final es de -0.01
aproximadamente. En la observación del sistema, dado que el promedio del autómata celular
propuesto es pequeño el error es similar al promedio del sistema complejo.
En la Figura 4.67 se tiene el comportamiento obtenido del sistema complejo y del modelo
propuesto para el estadístico desviación estándar en el entrenamiento (parte superior) y en la
observación del sistema (parte inferior). Se puede observar que este estadístico tiene un
comportamiento diferente al estadístico promedio en el modelo propuesto, en este caso la
desviación estándar intenta en el transcurso del tiempo igualar la desviación estándar del
sistema complejo Onda reactiva, en el entrenamiento. En la observación del sistema sucede
algo similar, a medida que transcurre el tiempo, la desviación estándar del modelo propuesto
intenta igualar la desviación estándar del sistema complejo, logrando reducir el error en el
tramo final.
89
Figura 4.67. Respuesta estadístico desviación estándar acumulada para t instantes de
tiempo.
En la Figura 4.68 se tiene el comportamiento del error de los estadísticos promedio y
desviación estándar entre el sistema complejo y el modelo propuesto tanto en el
entrenamiento como en la observación del sistema, parte superior e inferior, respectivamente.
En el entrenamiento se observa como el error aportado por el estadístico promedio no
disminuye, al contrario, va aumentando con el tiempo hasta que se estabiliza el promedio del
sistema complejo. Caso opuesto sucede con el error del estadístico desviación estándar, el
cual disminuye con el paso del tiempo y se aproxima valores cercanos a cero. Se puede
observar como la función de rendimiento se comporta de la misma forma que el error de la
desviación estándar.
En la observación del sistema el error del promedio permanece constante al igual que el error
de la desviación estándar y la función de rendimiento. Nuevamente el comportamiento del
error de la desviación estándar y la función de rendimiento son similares. El error de
desviación estándar es 0.008 y la función de rendimiento tiene un valor de -0.00165, en
términos porcentuales el error es de 0.037% y 0.080% respectivamente.
90
Figura 4.68. Respuesta error estadísticos promedio y desviación estándar para t instantes
de tiempo.
Figura 4.69. Respuesta del sistema complejo y el modelo propuesto para diferentes
instantes de tiempo.
En la Figura 4.69 se muestra en la parte superior el comportamiento del sistema complejo
Onda reactiva para diferentes instantes de tiempo. En la parte inferior se tiene el
91
comportamiento del modelo propuesto para los mismos instantes de tiempo. Nuevamente se
tiene un comportamiento cualitativo muy diferente entre el modelo propuesto y el sistema
complejo en el tiempo.
Figura 4.70. Respuesta del sistema complejo y el modelo propuesto para diferentes
instantes de tiempo.
El modelo logra capturar el comportamiento estadístico de la desviación estándar cuando se
evalúa con el estadístico promedio, el cual no tiene mucho aporte con la función de
rendimiento implementada. El comportamiento en el tiempo cuando se observa el sistema,
también presenta grandes diferencias cualitativamente entre el sistema complejo y el modelo
propuesto. En la Figura 4.70 se tiene un claro ejemplo, donde se han tomado los mismos
instantes de tiempo y la respuesta para ambos casos es diferente.
Se puede observar en la Figura 4.71 el comportamiento del error del estadístico promedio y
desviación estándar para instantes de tiempo mayores a 200. Esto con el fin de validar si el
modelo logra cumplir el objetivo de caracterizar los estadísticos del sistema complejo
escogidos en la función de rendimiento. Como se puede ver, el error de promedio no
disminuye, permanece constante, en cambio el error de desviación estándar varía para llegar
a 0. Después de implementar el algoritmo genético para un periodo de 200 instantes de
tiempo, la respuesta de la función de rendimiento sobrepasó el error de desviación estándar,
que dado los resultados, era el que estaba guiando a la función de rendimiento, para llegar a
un valor máximo de 0.275, disminuir y establecerse en -0.064.
92
Figura 4.71. Respuesta error de los estadísticos promedio, desviación estándar y función de
rendimiento para t instantes de tiempo.
La respuesta del estadístico promedio del modelo propuesto no sufre variaciones
considerables y permanece constante en el tiempo. El error de éste estadístico es similar al
promedio del sistema complejo. En la Figura 4.72 se puede apreciar este comportamiento en
la parte superior. En la parte inferior se observa el comportamiento de la desviación estándar
hasta cada instante de tiempo t, del sistema complejo, del modelo propuesto y el error entre
ambos estadísticos. En líneas entre punteadas se tiene la respuesta en el tiempo para instantes
de tiempo mayores a 200, esto con el fin de observar el comportamiento del modelo para
instantes de tiempo que no fueron evaluados.
Figura 4.72. Respuesta estadísticos promedio y desviación estándar acumulados para t
instantes de tiempo.
93
La respuesta de la desviación estándar confirma que es el estadístico dominante en la función
de rendimiento implementada y éste se va igualando a la desviación estándar del sistema
complejo.
Estadísticos promedio, desviación estándar y coeficiente de correlación.
Los resultados obtenidos con la función de rendimiento que involucra a los tres estadísticos,
al igual que con el sistema complejo Reacción – Difusión no fueron buenos, ya que el modelo
propuesto no logra reproducir el estadístico coeficiente de correlación. Tanto en el
entrenamiento como en la observación del sistema, el FIS de 2 reglas presentó los mejores
porcentajes de error. El mejor individuo se obtuvo con el FIS de 2 reglas con un porcentaje
de error de 1.291%. Comparando los resultados obtenidos con el sistema complejo Reacción
– Difusión, se puede observar en la Tabla 4.10 que los porcentajes de error son menores casi
10 veces. En la Tabla 4.15 se muestran las estadísticas de los porcentajes de error obtenidos
de los experimentos para 2, 4 y 8 reglas.
Tabla 4.15. Resultado estadístico de los experimentos realizados para los estadísticos
promedio, desviación estándar y coeficiente de correlación.
A pesar de que el porcentaje de error del mejor individuo sea menor a 2%, la media y
desviación estándar de los experimentos muestran que la mayoría de experimentos no
lograron obtener un porcentaje de error menor al 100%. El peor resultado se obtuvo con 8
reglas, donde el mejor individuo tiene un porcentaje de error muy grande, 638% con respecto
al mejor individuo.
La distribución de los porcentajes de error obtenidos en los experimentos para el mejor
individuo, se pueden ver en la Figura 4.73. A pesar de observar que la mayoría de resultados
de los experimentos se encuentran en la parte izquierda del histograma, los porcentajes de
error son altos, es decir la mayoría de experimentos tienen un porcentaje de error menor a
1000%.
94
En la Figura 4.74 se observa el error de entrenamiento para cada generación en el algoritmo
evolutivo diferencial para el mejor individuo. Se puede apreciar que el error de entrenamiento
desciende rápidamente a 0.004 alrededor de la quinta generación y se mantiene así hasta
llegar a 100 generaciones. Este es el error que desciende más rápido de todos los
experimentos realizados.
Figura 4.73. Histograma de resultados de experimentos para un FIS de 2 reglas en la
observación del sistema.
Figura 4.74. Error de entrenamiento para la función de rendimiento con tres estadístico.
95
El comportamiento del estadístico promedio junto con los otros estadísticos evaluados, sigue
manteniendo el comportamiento que había tenido con la desviación estándar. El promedio
del modelo propuesto es pequeño, cercano a cero. Por lo tanto el error para este estadístico
está dado por el promedio del sistema complejo. En la Figura 4.75 se tiene el comportamiento
tanto en el entrenamiento como en la observación del sistema.
Figura 4.75. Estadístico promedio acumulado en t instantes de tiempo.
Figura 4.76. Estadístico desviación estándar acumulada en t instantes de tiempo.
96
Como se ha presentado en la mayoría de experimentos, el estadístico desviación estándar ha
sido reproducido por el modelo propuesto cuando se ha evaluado sólo y con otros
estadísticos. En la Figura 4.76 se puede ver como el estadístico del modelo propuesto se
acerca al estadístico del sistema complejo Onda reactiva. Al final en la observación del
sistema el error es 0.0003.
Figura 4.77. Estadístico coeficiente de correlación acumulado en t instantes de tiempo.
Como se ha mencionado con anterioridad, el estadístico coeficiente de correlación entre el
sistema complejo y el modelo propuesto no se logró reproducir, esto puede ser debido a las
no linealidades que presentan cada sistema en sí. En la Figura 4.77 se muestra el
comportamiento del coeficiente de correlación en el entrenamiento y observación del
sistema. En ambos casos el coeficiente de correlación disminuye en vez de aumentar a 1 para
determinar si hay linealidad entre el sistema complejo Onda reactiva y el modelo propuesto.
El error del estadístico coeficiente de correlación fue el mayor entre los tres estadísticos
evaluados con un porcentaje de error en la observación del sistema de 648.52%, la desviación
estándar tuvo el menor porcentaje de error con 0.0182%. La función de rendimiento exhibe
el mismo comportamiento que el error del estadístico desviación estándar.
Una vez más el modelo propuesto no logra reproducir el comportamiento en el tiempo del
sistema complejo. En la Figura 4.79 y Figura 4.80 se muestra el comportamiento en el tiempo
para el entrenamiento y la observación del sistema respectivamente.
97
Figura 4.78. Respuesta error de los estadísticos promedio, desviación estándar y
coeficiente de correlación para t instantes de tiempo.
Figura 4.79. Respuesta del sistema complejo y el modelo propuesto para diferentes
instantes de tiempo.
98
Figura 4.80. Respuesta del sistema complejo y el modelo propuesto para diferentes
instantes de tiempo.
Se realiza una simulación para observar el comportamiento del modelo propuesto para
instantes de tiempo mayores a 200 con el mejor individuo obtenido en la observación del
sistema. En la Figura 4.81 se muestran los errores del estadístico promedio, desviación
estándar y coeficiente de correlación. Al mismo tiempo se muestra el comportamiento de la
función de rendimiento para instantes de tiempo mayores a 200. Las líneas punteadas
representan los resultados obtenidos del modelo propuesto para t > 200. Algo interesante, es
el pequeño sobre impulso que tiene la función de rendimiento para igualarse con el error de
desviación estándar. El porcentaje de error para los diferentes estadísticos en el instante de
tiempo t=1000 son: promedio de 74.46%, desviación estándar de 3.38%, coeficiente de
correlación de 627.83% y la función de rendimiento de 64.61%. Estos porcentajes son con
respecto al máximo valor del sistema complejo en el activador.
Por último en la Figura 4.82 se observa la respuesta de cada estadístico del sistema complejo
y el modelo propuesto. En el caso del promedio, el error es el promedio del sistema complejo.
La desviación estándar presentó los mejores resultados, el error de éste estadístico es de
3.38% y la desviación estándar del modelo propuesto se acerca, intenta igualar la desviación
estándar del sistema complejo.
El error del coeficiente de correlación aumenta con respecto pasa el tiempo, aunque para
t=1000 el error no aumenta en la misma proporción que el inicio. A pesar de ser un valor
grande, el error no afectó con demasía en la función de rendimiento.
99
Figura 4.81. Respuesta error para los estadísticos promedio, desviación estándar, coeficiente
de correlación y la función de rendimiento para t instantes de tiempo.
Figura 4.82. Estadísticos promedio, desviación estándar y coeficiente de correlación para t
instantes de tiempo.
100
4.3. DISCUSIÓN
La propuesta de modelamiento de sistemas complejos usando autómatas celulares no
uniformes es un proceso de experimentación en el cual se utilizaron dos sistemas complejos
de referencia, los sistemas complejos Reacción – Difusión y Onda Reactiva. Para ambos
sistemas complejos se utilizaron cinco funciones de rendimiento basadas en estadísticos, los
cuales fueron el promedio, desviación estándar, coeficiente de correlación, la combinación
del promedio con la desviación estándar y la combinación de los tres estadísticos. Las
funciones de rendimiento evaluaban el error entre el estadístico del sistema complejo y el
estadístico del modelo propuesto.
Basados en la experimentación realizada y los resultados obtenidos, se puede decir que el
mejor individuo se presentó cuando se evaluó el estadístico desviación estándar en el
sistema complejo Onda Reactiva con un porcentaje de error de 0,00084%. De forma
general los porcentajes de error en la observación del sistema fueron menor de 0,1% para los
estadísticos promedio y desviación estándar, independientemente y combinados.
Aunque se observó que al evaluar los dos estadísticos al tiempo, la desviación estándar era
quien aportaba a la función de rendimiento, el promedio del modelo propuesto no se
lograba reproducir. Caso contrario cuando se evaluó sólo este estadístico.
El coeficiente de correlación es el estadístico que no se logró emerger en el modelo
propuesto, los porcentajes de error para el mejor individuo en ambos casos superaron el
140%. Estos porcentajes de error se vieron disminuidos al combinarlos con el estadístico
promedio y desviación estándar.
El modelo propuesto con un autómata celular difuso no uniforme y sintonizado con un
algoritmo evolutivo diferencial arrojó buenos resultados evaluando los estadísticos
promedio, desviación estándar, y todas las combinaciones de éstos, a pesar de que el
estadístico desviación estándar era quien aportaba más a la función de rendimiento, tanto que
en varios casos esta tomaba al cabo de un tiempo el mismo comportamiento que el error de
desviación estándar.
A pesar de lograr reproducir el comportamiento estadístico de los sistemas complejos, en el
tiempo esto no se vio reflejado. En todos los experimentos se observó diferencias notorias
para los mismos instantes de tiempo entre los sistemas complejo y el modelo propuesto.
Por otro lado, esta propuesta surgió con el fin de continuar un trabajo exploratorio basado en
un autómata celular difuso sintonizado con algoritmos evolutivos simbióticos [24]. Esta
propuesta se basó el calcular el RMSE y el VAF como funciones de rendimiento, las
cuales funcionaron bien para el sistema complejo Onda no lineal en el vació pero no se
obtuvieron resultados satisfactorios para los sistemas complejos Reacción – Difusión y Onda
Reactiva.
101
Figura 4.83. (a) Sistema complejo: Reacción-Difusión versus (b) Mejor autómata Celular
Difuso obtenido con RMSE (c) Mejor autómata Celular Difuso obtenido con VAF.
En la Figura 4.83 se muestra el resultado obtenido de [24], por lo tanto se deseaba explorar
una forma en la que un autómata celular difuso obtuviera mejores resultados. De tal modo
que el enfoque se llevó a explorar el comportamiento estadístico de los sistemas complejos e
implementar un autómata celular no uniforme. Los resultados muestran que el autómata
celular difuso no uniforme logró reproducir los estadísticos promedio y desviación
estándar con porcentajes de error menores al 0,1%, logrando exhibir el comportamiento
estadístico para los sistemas complejos Reacción-Difusión y Onda Reactiva.
De forma general se puede decir que el autómata celular difuso no uniforme sintonizado con
algoritmos evolutivos permite modelar en cierta medida sistemas complejos ya que en la
mayoría de experimentos se logró reproducir el comportamiento estadístico de estos. Hubo
experimentos en los cuales el porcentaje de error no fue menor al 10% y el comportamiento
en el tiempo no se logró reproducir. Esto lleva a formular las siguientes hipótesis:
•
Hipótesis 1: El coeficiente de correlación no se logró emerger dado que es un
estadístico que permite observar el grado de linealidad entre dos funciones. Al
intentar reproducir la linealidad entre el sistema complejo y el modelo propuesto, las
características no lineales de cada uno impidieron emerger este estadístico.
•
Hipótesis 2: El número de estadísticos evaluados en conjunto no son los suficientes
para lograr reproducir el comportamiento en el tiempo del sistema complejo en el
modelo propuesto. Dado que se usaron estadísticos convencionales y sólo tres, es
posible que con otro tipo de estadísticos, como el coeficiente de Hurts, de forma o
asimetría se logre reproducir el comportamiento en el tiempo.
•
Hipótesis 3: El diseño del autómata celular no uniforme se basó únicamente en el
número de reglas por las que evolucionaba. Dependiendo la ubicación de la celda ésta
evolucionaba por una regla determinada. Esto lleva a pensar que la no
102
uniformidad que se diseñó para el autómata celular no sea suficiente para reproducir
estadísticos como el coeficiente de correlación. Se debe comprobar con otros
diseños, como el radio, vecindad.
•
Hipótesis 4: Las funciones de rendimiento al momento de evaluar dos o más
estadísticos sólo tenían en cuenta una capa, la del Activador para ambos sistemas
complejos y se multiplicaba el error de cada uno. Cambiando la forma de evaluar
estas funciones de rendimiento, donde se tiene en cuenta otros factores que aporten
más información, se pueda obtener mejores resultados con respecto a reproducir
estadísticos más complejos y el comportamiento en el tiempo.
103
CAPITULO 5.
CONCLUSIONES Y TRABAJO FUTURO
5.1. APORTES ORIGINALES
Como primer aporte se presenta la propuesta para modelar sistemas complejos a través de
autómatas celulares difusos no homogéneos, pues se tomó como punto de partida el proceso
realizado con anterioridad en un trabajo de grado que trabajó autómatas celulares difusos
homogéneos [24], siendo así el diseño de la estructura de cada una tipo de celda difusa y la
distribución de las mismas dentro de la grilla del autómata no homogéneo un aporte original.
Para la validación de la propuesta se realizó un desarrollo mediante herramientas de software
de distribución libre como lo es el IDE spyder contenido en la distribución Anaconda, a través
de un lenguaje de programación abierto como python y construyendo algunas funciones que
pueden ser útiles para reproducir posteriores experimentos.
A través del trabajo desarrollado se intentó recrear una serie de estadísticos extraídos de un
sistema complejo, tanto de manera individual como de manera conjunta, para lo que fue
necesario construir funciones de rendimiento para el algoritmo genético que sintonizaría las
celdas difusas del autómata celular, siendo así un aporte original el conjunto de funciones de
rendimiento resultantes. Finalmente se crearon cinco funciones de rendimiento para ser
ejecutadas en cada uno de los casos de validación.
Como manera de exponer a la comunidad científica los resultados del trabajo realizado, se
realizará un artículo que sintetizará el proceso realizado y agrupará los resultados más
relevantes a modo de realizar una reflexión sobre el estudio de los sistemas complejos a través
del uso de técnicas de Inteligencia Computacional.
5.2. TRABAJO FUTURO
A través del desarrollo de este proyecto, surgen las siguientes propuestas para ser llevadas a
cabo en futuros trabajos que se relacionen con el modelamiento de sistemas complejos con
autómatas celulares difusos y algoritmos de evolución:
Se sugiere explorar más estadísticos de interés en los experimentos que incluyan, con el fin
de ampliar la visión del comportamiento de los modelos creados a partir de autómatas
celulares difusos.
Dado que en la serie de experimentos realizados para validar el modelo, fue un estadístico en
concreto el que gobernó el comportamiento de la función de rendimiento, se considera
ahondar en la búsqueda del porqué de dicha particularidad, debido a que este punto podría
dar visos sobre el comportamiento de los modelos usados y también de los sistemas
complejos a modelarse en sí.
104
Se propone hacer uso de tecnologías de avanzada y ofrecidas en la actualidad, que
proporcionen una mayor tasa de procesamiento, tales como GPUs y computadores de alta
velocidad, para realizar el corrimiento de los experimentos, debido a que esto podría reducir
notablemente el tiempo de ejecución de los experimentos con los que se validan los modelos
propuestos.
La creación de una herramienta, tipo aplicación de software con interfaz de usuario y cuyos
parámetros permitan ser programables para recrear algunos sistemas complejos ya
conocidos, que permita hacer un acercamiento más llamativo hacia los sectores que no han
tenido ni tienen un conocimiento profundo ni un contacto con los sistemas complejos, sería
una propuesta de trabajo que se deja a consideración.
Continuar abordando el mundo de los sistemas complejos, a través de la búsqueda e
indagación, diseño e implementación de modelos que permitan involucrar casos reales y que
evidencien la utilidad de las técnicas de Inteligencia Computacional en la búsqueda del
conocimiento.
105
Referencias bibliográficas
[1]. S. Ghosh y T. Lee, Modeling and Asynchronous Distributed Simulation: Analyzing
Complex Systems, Computing & Processing, Wiley-IEEE Press, 2000
[2]. Bar-Yam, Y., Dynamics of Complex Systems, Massachusetts: Addison Wesley
Longman, 1997.
[3]. J. Von Neumann, Theory of Self-Reproducing Automata, UMl Reprint University
Illinois, p. 388, 1966.
[4]. S. Wolfram, “Computation theory of cellular automata”, Communications in
Mathematical Physics, vol. 96, no. 1, pp. 15-57, Marzo 1984.
[5]. A. Ilachinski, Cellular Automata: A Discrete Universe, World Scientific Publishing
Co., 2001.
[6]. S. Al-Kheder, J. Wang y J. Shan, “Cellular automata urban growth model calibration
with genetic algorithms”, 2007 Urban Remote Sensing Joint Event, pp. 1-5, 2007.
[7]. H. Feng y C. Shao, “Using Cellular Automata for Modeling the Virus Infection
Process”, In Artificial Intelligence and Computational Intelligence, 2009. AICI ’09.
International Conference on, vol. 2, pp. 7-11, 2009.
[8]. G. Qiu, D. Kandhai y P. M. a. Sloot, “Understanding the complex dynamics of stock
markets through cellular automata”, Physical review. E, Statistical, nonlinear, and
soft matter physics, vol. 75, nº 4 Pt 2, p. 046116, 2007.
[9]. T. Yu y S. Lee, “Evolving cellular automata to model fluid flow in porous media”,
Evolvable Hardware, 2002. Proceedings. NASA/DoD Conference on, pp. 210-217,
2002.
[10].
A. Pascale, M. Nicoli, F. Deflorio, B. D. Chiara y U. Spagnolini, “Wireless
sensor networks for traffic management and road safety”, Intelligent Transport
Systems, IET, vol. 6, nº 1, pp. 67-77, 2012.
[11].
P. Anghelescu, “Encryption algorithm using Programmable Cellular
Automata”, In Internet Security (WorldCIS), 2011 World Congress on, pp. 233-239,
2011.
[12].
E. M. Carreno, R. M. Rocha y A. Padilha-Feltrin, “A Cellular Automaton
Approach to Spatial Electric Load Forecasting”, Power Systems, IEEE Transactions
on, vol. 26, nº 2, pp. 532-540, 2011.
[13].
Z. Zhu y C. Liu, “Micromachining Process Simulation Using a Continuous
Cellular Automata Method”, Microelectromechanical Systems, Journal of, vol. 9, nº
2, pp. 252-261, 2000.
[14].
D. Camara, “Non-Uniform Cellular Automata a Review”, Department of
Computer Science University of Maryland, 2009.
[15].
M. Sipper, “Non-Uniform cellular automata: Evolution in rule space and
formation of complex structures”, Artificial life IV, R. A. Brooks and P. Maes (eds.),
The MIT Press 1994, pp. 394-399, 1994.
[16].
J. M. Baetens y B. D. Baets, “Continuous cellular automata on irregular
tessellations: Mimicking steady-state heat flow”, In 2010 Second World Congress on
Nature and Biologically Inspired Computing (NaBIC), nº C, pp. 53-59, 2010.
106
[17].
K. Al-Ahmadi, L. See, A. Heppenstall y J. Hogg, “Calibration of a fuzzy
cellular automata model of urban dynamics in Saudi Arabia”, Ecological Complexity,
vol. 6, nº 2, pp. 80-101, Jun 2009.
[18].
H. Wang, J. Jiang, L. Zhou y L. Du, “Image Processing Based on Fuzzy
Cellular Automata Model”, in 2009 Fourth International Conference on Innovative
Computing, Information and Control (ICICIC), pp. 954-957, 2009.
[19].
J. Wasilewski, "Spatial Electric Load Forecasting Using Fuzzy Cellular
Automata Technique", In 46th International Universities Power Engineering
Conference, pp. 1-6, September 2011.
[20].
S. Alkheder and J. Wang, "Fuzzy cellular automata approach for urban growth
modeling", in ASPRS 2006 Annual Conference, 2006.
[21].
Y.-G. Gong y L. Liu, “A fuzzy cellular automaton model based on NaSchH
model”, In 2010 2nd International Conference on Signal Processing Systems, pp. V2518-V2-522, 2010.
[22].
M. Mraz, N. Zimic, I. Lapanja y I. Bajec, “Fuzzy cellular automata: from
theory to applications”, Proceedings 12th IEEE Internationals Conference on Tools
with Artificial Intelligence. ICTAI 2000, pp. 320-323, 2000.
[23].
C. J., L. Y., M. M. y O. N., “Complex System Modeling Using TSK Fuzzy
Cellular Automata And Differential Evolution”, In 2013 IEE International
Conference on Fuzzy System, 2013.
[24].
C. J. y L. Y, Propuesta para el modelamiento de sistemas complejos basada
en autómatas celulares difusos y algoritmos evolutivos simbióticos, Trabajo de grado,
Ingeniería Electrónica, Bogotá: Universidad Distrital Francisco José de Caldas, 2013.
[25].
G. Cattaneo, A. Dennunzio, E. Formenti y J. Provillard, “Non-uniform cellular
automata”, In Lecture Notes in Computer Science, Springer-Verlag, vol. 5457, pp.
302-313, 2009.
[26].
A. Dennunzio, E. Formenti y J. Provillard, “Non-uniform cellular automata:
Classes, dynamics and decidability”, Information and Computation 215, pp. 32-46,
2012.
[27].
M. Sipper, “Co-evolving non-uniform cellular automata to perform
computations”, Physica D: Nonlinear Phenomena, vol. 92, pp. 193-208, 1996.
[28].
M. Bidlo y Z. Vasicek, “Comparison of the Uniform and Non Uniform
Cellular Automata-Based Approach to the Development of Combinational Circuits”
In Proc. of The 4th NASA/ESA Conference on Adaptive Hardware and Systems, AHS
2009. IEEE Computer Society, p. 423–430, 2009.
[29].
R. A. L.T., G. L., G. G., P.-V. Wilfredo, Z. Marcelo, V. Z. C. J. y V. Z. F. J.,
“Evolutionary modeling of larval dispersal in blowflies using non-uniform cellular
automata”, CEC 2006. IEEE Congress, pp. 1127- 1134, 2006.
[30].
R. Rucker, “Continous-Valued Cellular Automata in Two Dimensions” Santa
Fe Institute Studies in the Sciences of Complexity Proceedings, pp. 1-21, 2003.
[31].
E. Sapin, “Evolutionary heuristics for automatic discoveries of cellular
automata simulating AND gates”, In IEEE Congress on Evolutionary Computation,
pp. 1-8, 2010.
[32].
S. R. Phinn, “Developing a Cellular Automaton Model of Urban Growth
Incorporating Fuzzy Set Approaches”, Computers, Environment and Urban Systems,
vol. 27, no. 6, pp. 637-658, 2003.
107
[33].
S. Wolfram, A New Kind of Science, 1st ed. Wolfram Media; 1 edition, May.
2002.
[34].
S. Wolfram, Theory and Application of Cellular Automata. Singapur: World
Scientific Publishing Co. Pte. Ltd., 1986.
[35].
C. Hand, “Simple Cellular Automata on a Spreadsheet”, [En línea]. Available:
http://www.economicsnetwork.ac.uk/cheer/ch17/hand.htm. [Último acceso: 05 Feb
2014].
[36].
D. Montgomery y G. Runger, Probabilidad y estadística aplicadas a la
ingeniería, McGraw-Hill, segunda edición, pp. 16-29, 2002.
[37].
S. Ihara, «Information theory for continouos systems, » World Scientific
Publishing Co. Pte. Ltd., pp. 2, 1993.
[38].
C. Nicolis y G. Nicolis, Foundation of complex systems-Nonlinear Dynamics,
Statistical Physics, Information and Prediction, World Scientific Publishing
Company, 2007.
[39].
Holland, J. H.: Adaptation in Natural and Artificial Systems. MIT Press,
Cambridge, MA, Second edition, 1992.
[40].
Sipper, M. “A brief introduction to genetic algorithms”. Web page, Swiss
Federal Institute of Technology, Switzerland. 1996.
[41].
M. R. Spiegel, Estadística (Segunda Edición), Mg. Graw Hill, 1997.
[42].
Y. Asgari, M. Ghaemi y M. G. Mahjani, Cellular Automata Simulation of a
Bistable Reaction Diffusion System: Microscopic and Macroscopic Approaches, vol.
30, A. o. SID, Ed., 2011, pp. 143-150.
[43].
L. X. Wang, A course in fuzzy systems and Control, Prentice Hall, 1997.
[44].
B. Chopard y C. Droz, «Cellular Automata Modeling of Physical Systems,»
de The Press Syndicate of the University of Cambridge, 1999, pp. 8-30.
[45].
B. Peña Pellicer, Inestabilidades de Turing en sistemas de reacción-difusión
(Tesis Doctoral), Pamplona, España: Universidad de Navarra, 2002.
108