PRÁCTICA Nº 4: MODELIZACIÓN E IDENTIFICACIÓN DE LOS
Anuncio

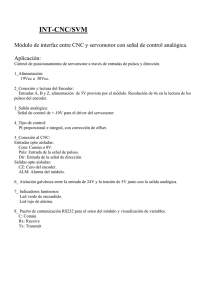
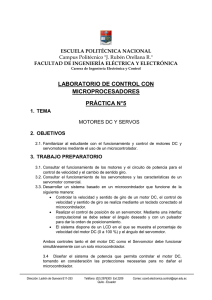
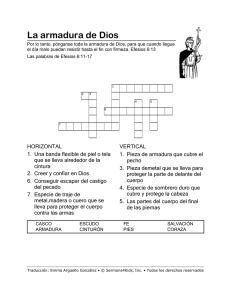
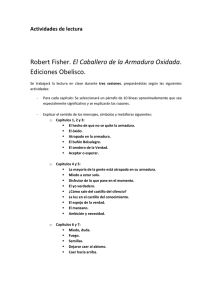
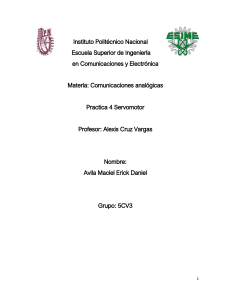
PRÁCTICA Nº 4: MODELIZACIÓN E IDENTIFICACIÓN DE LOS PARÁMETROS DE UN SERVOMOTOR 1. MODELIZACIÓN E IDENTIFICACIÓN DE LOS PARÁMETROS DE UN SERVOMOTOR............................................................................................................... 1 1.1 OBJETIVOS ................................................................................................... 1 1.2 MODELIZACIÓN ......................................................................................... 1 1.3 IDENTIFICACIÓN........................................................................................ 2 1.4 EXPERIMENTACIÓN.................................................................................. 4 1.5 PRECAUCIONES .......................................................................................... 4 1.6. BIBLIOGRAFÍA ............................................................................................ 4 Asignatura: Sistemas Lineales. Ingeniería en Automática y Electrónica Industrial. ESIDE. Área de Automática. Curso 2006-2007 Práctica Nº4. Modelización e identificación de los parámetros de un servomotor 1. MODELIZACIÓN E IDENTIFICACIÓN DE LOS PARÁMETROS DE UN SERVOMOTOR 1.1 OBJETIVOS Objetivos globales 1.2 • Modelizar el servomotor de cc controlado por armadura • Identificar los parámetros característicos del mismo • Verificar los resultados mediante Simulink MODELIZACIÓN Se puede obtener un modelo matemático para el servomotor cc controlado por armadura considerando el circuito equivalente de la figura 1.1, donde va(t) e ia(t) representan, respectivamente, la tensión de entrada y la corriente en el circuito de armadura, ω(t) es la velocidad de giro y J y f son, respectivamente, la inercia de carga y la fricción. No es difícil demostrar (Dorf, 2001) que: Ω( s ) = (τ e s + 1) f K m Ra f Va ( s ) − T (τ e s + 1)(τ m s + 1) + K e K m (Ra f ) (τ e s + 1)(τ m s + 1) + K e K m (Ra f ) d donde τ e = La Ra , τ m = J f , K m es el par constante, y Td representa el par de perturbación. La modelización se puede simplificar al diagrama de bloques mostrado en la figura 1.2. ia (t ) Ra La J ω (t ) v a (t ) e(t ) f Figura 1.1. Circuito equivalente de un motor cc controlado por armadura. Laboratorio de Sistemas de Medida y Regulación 4-1 Sistemas Lineales. Cuaderno de Prácticas. Perturbación Td (s) + Va (s ) T m (s) Km R a + La ⋅ s – — Velocidad TL (s ) + 1 Js + b Ω(s ) Posición 1 s Θ(s) Kb Figura 1.2. Diagrama del servomotor cc controlado por armadura. Km Ω( s ) , sin embargo para la mayoría de = Va ( s ) (Ra + La s )[( Js + b ) + K b K m ] los servomotores cc, la constante de tiempo de la armadura τ e = La Ra es despreciable, Ω( s ) K m (Rab + K b K m ) y por tanto, G ( s ) = = , donde la constante de tiempo Va ( s ) τs + 1 equivalente es τ = Ra J (Rab + K b K m ) . Por tanto, G ( s ) = Finalmente, un modelo más simple del sistema puede ser: K Ka Ω( s ) = Va ( s ) − d Td ( s ) τs + 1 τs + 1 1.3 IDENTIFICACIÓN El modelo presentado en la figura 1.3 asume que la planta es lineal. Sin embargo, en general, esto no es cierto para todos los valores de va(t) y por lo tanto primero debe estudiarse el comportamiento estático del sistema y como consecuencia obtener el rango de va(t) para el que el sistema es lineal. Perturbación Td (s ) Va (s ) Velocidad — Km + 1 τs + 1 Ω(s ) Kt Vt (s ) Figura 1.3. Diagrama de bloques del servomotor cc controlado. 4-2 ESIDE. Departamento de Automática Práctica Nº4. Modelización e identificación de los parámetros de un servomotor Experimento para encontrar la región lineal de operación y la ganancia estática KaKt La región lineal se puede determinar de la siguiente manera: • • • Aplicar tensiones constantes (Va) a las terminales de la armadura y registrar los correspondientes valores en estado estacionario (Vt) en los terminales del tacómetro. Representar los puntos (Va, Vt) y obtener una recta mediante el método de mínimos cuadrados. El rango lineal será aquel que mejor se aproxime a la recta. Por tanto el modelo no lineal incluye la zona muerta de la figura 1.4. Perturbación Td (s ) Va (s ) Velocidad — Km + 1 τs + 1 Ω(s ) Kt Figura 1.4. Diagrama de bloques con un bloque no lineal. Matemáticamente, la zona muerta se puede expresar como: ⎧ K K [v (t ) − V0 ] va (t ) > V0 vt (t ) = ⎨ a t a va (t ) < V0 0 ⎩ La consecuencia de la introducción de la zona muerta es que el modelo lineal de la figura 1.3 es sólo válido en la región lineal y, por lo tanto, una mejor descripción del sistema será proporcionada por el diagrama de bloques de la figura 1.4. Para calcular el valor de V0 se puede utilizar la siguiente expresión: n 1 V0 = ∑ Vti − K a K tVai i =1 n Experimento para determinar el parámetro Ka Dividir la ganancia estática KaKt entre el valor de la sensibilidad de la tacodinamo Kt Laboratorio de Sistemas de Medida y Regulación 4-3 Vt (s ) Sistemas Lineales. Cuaderno de Prácticas. Identificación de τ a partir de la respuesta transitoria a una entrada escalón La respuesta de un sistema de primer orden ante una entrada escalón está dada por: t − ⎛ vt (t ) = K a K t ⎜⎜1 − e τ ⎝ ⎞ ⎟ ⎟ ⎠ τ es el tiempo que tarda el sistema en alcanzar el 63% del valor final 1.4 EXPERIMENTACIÓN • • 1.5 Obtenga el modelo del sistema Compruebe los resultados experimentales con el modelo obtenido en Simulink PRECAUCIONES 1.6. Alimentar adecuadamente todos los módulos. No encender las fuentes de alimentación hasta asegurarse de que todo está bien conectado y los parámetros de los elementos bien ajustados. Conectar todas las “referencias” de los elementos conectados. BIBLIOGRAFÍA Jacob, Dominique. Régulation PID en genie eléctrique. Études de cas. Ed. Ellipses, 2000. 4-4 Dorf, Richard. Modern Control Systems, 9th edition, Prentice Hall, 2001 ESIDE. Departamento de Automática