Comparación de técnicas de control para seguimiento de velocidad
Anuncio

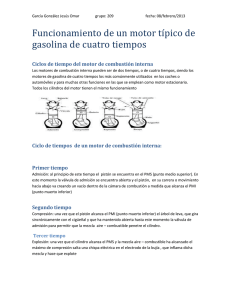
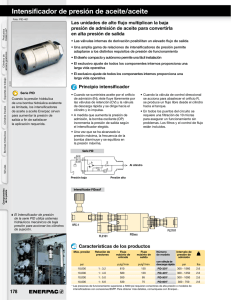
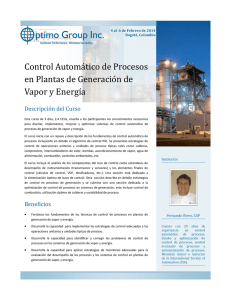
Congreso Nacional de Control Automático, AMCA 2015, Cuernavaca, Morelos, México. 93 Comparación de técnicas de control para seguimiento de velocidad en un motor de combustión interna S. F. Muñoz, R. Alzate Escuela de Ingenierías Eléctrica, Electrónica y de Telecomunicaciones Universidad Industrial de Santander, Bucaramanga, Colombia (e-mail: [email protected], [email protected]) Resumen: Se presentan técnicas de control para seguimiento de velocidad en un motor de combustión interna, analizando dependencias paramétricas del sistema controlado. Inicialmente, se aborda el modelado del motor de combustión interna a partir de la aproximación de valor medio. Posteriormente empleando simulación numérica en MATLAB®, se procede a diseñar e implementar un controlador local PID y dos estrategias de control no lineal: linealización por realimentación y control por modos deslizantes. Resultados sugieren para el PID un seguimiento de velocidad aceptable ante una referencia sinusoidal, siendo degradado por perturbaciones de carga en el sistema; la técnica de linealización por realimentación corrige perturbaciones pero depende fuertemente en los parámetros del modelo; el control por modos deslizantes es inmune ante incertidumbres paramétricas, aunque presenta retardos en la transición hacia la superficie de deslizamiento. Trabajo futuro incluye análisis y control de la relación aire/combustible. Palabras clave: Control PID, Control por modos deslizantes (SMC), Linealización por realimentación (FL), Modelo de valor medio (MVEM), Motor de combustión interna (ICE) 1. INTRODUCCIÓN Los motores de combustión interna (Internal Combustión Engine - ICE) son máquinas que transforman en movimiento la energía química almacenada en un combustible, a partir de reacciones físico-químicas al interior de una cámara de combustión (Heywood 1988). Desde sus inicios, los problemas de esta máquina siempre han estado asociados con su baja eficiencia e impactos ambientales (Fu et al. 2013). Para mitigar estas deficiencias, se han aplicado modificaciones en sus diseños (Überall et al. 2015). También se ha realizado la síntesis de nuevos compuestos como los biocombustibles (Bergthorson & Thomson 2015). Sin embargo, el mayor impacto se da a través de microcomputadoras (ECU – Engine Control Unit) que permiten monitorear las variables representativas del sistema y tomar decisiones para mejorar su desempeño (Slimen et al. 2010; Vijay et al. 2010). Este tipo de tecnología permite considerar la viabilidad de vehículos totalmente autónomos (Li & Trentini 2010; Hovareshti & Baras 2010; Chen et al. 2010). En el caso particular del control de velocidad de un ICE, se proponen en la literatura técnicas que actúan sobre la válvula de entrada de aire, a través de control óptimo (Passenbrunner et al. 2013; Agudelo et al. 2011), no lineal basado en funciones de Lyapunov (Xiaohong & Tielong 2011) o predictivo (Shu et al. 2012; Cairano et al. 2014), entre otras. Uno de los modelos más representativos para formular acciones de control sobre ICE, lo constituye el modelo de valor medio (MVEM – Mean Value Engine Model) desarrollado por E. Hendricks et al. (Sorenson & Hendricks 1990). Aunque existen otros métodos para Reserva de Derechos No. En trámite, ISSN. En trámite modelar un ICE, el MVEM es aceptado por la reducción en complejidad matemática resultante (Chaing et al. 2007; Rajamani 2006). Cualquiera sea el caso, los modelos para este tipo de proceso son complejos y por tanto, se requieren estrategias de control no convencional para regular el comportamiento dinámico de las variables del sistema. En este orden de ideas, el presente artículo propone una comparación entre una técnica de control PID convencional y dos estrategias de control no lineal: linealización por realimentación y control por modos deslizantes, para verificar las condiciones sobre las cuales es posible considerar eficiente la utilización de técnicas de dominio local y con dependencia paramétrica como el PID, en comparación con alternativas globales en términos del espacio de estado y adicionalmente robustas, sobre el problema de seguimiento para la velocidad de un ICE. El contenido del artículo se presenta como sigue: la Sección 2 describirá el modelo de valor medio para un motor de combustión interna; la Sección 3 analiza el diseño de un control PID para dicho modelo; a su vez las Secciones 4 y 5 realizan lo propio para el caso de técnicas no convencionales de control; en la Sección 6 se realiza una discusión de los resultados obtenidos a partir de rutinas de simulación, para proceder a formular conclusiones generales del trabajo en la Sección 7. 2. MODELO DE VALOR MEDIO (MVEM) Este modelo (ver Fig. 1) se subdivide principalmente en los sistemas del cigüeñal y de múltiple de entrada. Congreso Nacional de Control Automático, AMCA 2015, Cuernavaca, Morelos, México. 94 2.2 Dinámica del cigüeñal Consta de dos elementos: el cigüeñal y el cilindro. En (6) se expresa el cambio temporal en la velocidad del cigüeñal , tomando pérdidas por fricción b , la carga aplicada l Figura 1. Representación del motor de combustión interna 2.1 Dinámica del múltiple de entrada Se compone de la válvula mariposa, el múltiple y la válvula de entrada al cilindro. El sistema se supone adiabático e isentrópico y por tanto, se puede modelar la dinámica del múltiple de entrada mediante la ley de conservación de la masa (1) y la ecuación del gas ideal (2). mcont mmariposa mcilindro R Tmultiple mmariposa mcilindro pmultiple V (1) 1 Vd J 4 pmultiple Vmultiple c de cierre de la válvula como 0° y el ángulo de apertura mínima r o ángulo de “ralentí” de 3° grados. Am D2 4 1 cos r c cos c 120 f Q mcilindro n Vd AFR l p fri .efec pex pmultiple (7) 1 K2 vol pmultiple p fri .efec K1 l (8) J pamb pmultiple 5000 4000 3000 2000 (4) 1000 0 Para un manejo más compacto del modelo se agrupan los términos constantes de (3), dando origen a (5). Con esta ecuación se consigue el modelo final del subsistema donde la entrada será el ángulo de la válvula mariposa r ,90 . (6) 6000 Am describe toda la información de la válvula y se representa como (4), considerando el ángulo 1 gen fr b l J En Fig. 2 se presenta la relación entrada-salida para el MVEM, a partir de la interacción de las ecuaciones (5) y (8) empleando los valores de parámetro ilustrados en el Anexo A y las variables globales del Anexo B. Esta curva representa la caracterización del comportamiento dinámico nominal del sistema. [rpm] Donde R Tmultiple gen . Asimismo, reorganizando (7) en términos de constantes globales se obtiene (8). (2) Cd Am Pamb 2k k 1 R Tamb (3) n Vd nvol Pmultiple 120 R Tmultiple y el torque generado Modificando (6) en términos de las presiones efectivas de la máquina, se obtiene (7). multiple El flujo que pasa a través de la válvula de mariposa depende del ángulo de apertura de la misma, mientras que el flujo de entrada al cilindro depende de la eficiencia volumétrica y de la presión en el múltiple. Por tanto, una manera alternativa de representar (2) es mediante (3). fr y por bombeo del cilindro pmultiple K3 K5 K6 1 cos K4 pmultiple vol n (5) 0 10 20 30 40 50 60 70 80 90 [°] Figura 2. Relación entrada-salida para el MVEM 3. CONTROL CONVENCIONAL PID Tomando en cuenta revoluciones promedio en automóviles convencionales entre 1000 y 4000 rpm, se limita el rango de la válvula mariposa entre 4° y 21°. De esta manera, es Octubre 14-16, 2015. Congreso Nacional de Control Automático, AMCA 2015, Cuernavaca, Morelos, México. posible obtener un modelo lineal aproximado para el sistema dado por: 225.08 23.78; 4 10 189.57 343.37; 10 16 144.62 1017.6; 16 21 (9) Posteriormente, empleando sintonización empírica fue posible obtener los siguientes parámetros para un controlador PID: Kc 1.5 , Kc 0.02 , KcTd 0.03 , Ti z1 K3 K5 K6 z1 x K3 K5 K6 0 x2 1 z1 x1 A partir de lo cual, manera similar, se calcula el segundo estado a partir de (Slotine & Li 1991) (14) z2 z1 f z z2 1 x1 (15) Para que la formulación en (15) tome la forma esperada en (12), la entrada u debe corresponder con (16). Utilizando (5) y (8) se obtiene la ecuación de estado (11), donde pmultiple es el estado x1 y la velocidad angular es x2 . Asimismo, se define como entrada u 1 cos y como la salida y h x x2 . u v z2 f z2 g (16) Resolviendo (16) y proponiendo v como (17), v z1d a1 z1 z1d a0 z1 z1d f g X 1 1 u f2 g2 K3 K 4 x1 vol x2 c X K1 K 2 vol x1 p fri .efec pamb x1 J K K K 3 5 6 u 0 z1 f1 f2 x2 f 2 z1 z2 z2 l f z 2 l g z 2 u (10) 4. CONTROL DE LINEALIZACIÓN POR REALIMENTACIÓN el estado z1 x2 es una solución válida. De resultando la nueva dinámica del estado transformado dada por: implementado a partir de la realización siguiente: 1 U s Kc 1 Td s Ti s 95 (17) z1d es la trayectoria deseada de velocidad y a0 , a1 donde son constantes que garantizan la estabilidad del sistema, se obtiene la entrada (18) para la cual el sistema se linealiza globalmente (FL – Feedback Linearization) y se controla en todo el rango de operación. (11) f f v 2 f1 2 f 2 x2 x1 u f 2 K3 K5 K 6 x1 (18) Con ayuda de difeomorfismos se buscar realizar un cambio de estados para obtener la forma linealizada (12) del sistema, 5. CONTROL POR MODOS DESLIZANTES z1 z2 Se define en (19) la superficie de deslizamiento atrayente para la respuesta del sistema (Slotine & Li 1991). z2 v donde (12) d s dt z1 y z2 son los nuevos estados y v es una función dependiente del error que garantiza la estabilidad del nuevo sistema. Por tanto, para determinar z1 se debe satisfacer (Slotine & Li 1991): z1 g 0 (13) n 1 x (19) Derivando (19) con respecto al tiempo (Slotine & Li 1991), se obtiene una expresión para la dinámica del error a partir de (20). s z1 z1 z1 z1d z1 z1d Octubre 14-16, 2015. (20) Congreso Nacional de Control Automático, AMCA 2015, Cuernavaca, Morelos, México. s f b u z1d z1 z1d f l f z2 ; b l g z 2 El control por modos deslizantes (SMC – Slinding Mode Control) es robusto. Las funciones que contienen incertidumbres se denotan como fˆ y b̂ . Así la entrada de control u que cancela las no linealidades del sistema se muestra en (21). 96 De otro lado, en Fig. 5 se aplica una perturbación de carga en el rotor del cigüeñal, correspondiente con un valor constante de 10 Nm en t = 3000 s. Como se observa, la respuesta del sistema controlado sigue siendo favorable para las estrategias de linealización por realimentación (FL) y por modos deslizantes (SMC), mientras el PID es incapaz de realizar la tarea de seguimiento. Lo anterior permite verificar el carácter global de las acciones de control nolineal propuestas. 4000 fˆ z1d z1 z1d bˆ 3500 (21) Para satisfacer la condición de deslizamiento, a esta entrada se le debe agregar un término dependiente de la función signo para mantener la respuesta en la superficie (Slotine & Li 1991), dando origen a (22). uˆ fˆ z1d z1 z1d k sgn s bˆ bˆ (b b )1/2 min 3000 2500 [rpm] uˆ 2000 1500 1000 (22) PID FL SMC Referencia 500 0 max -500 En el caso particular abordado, se consideraron imprecisiones en el parámetro de coeficiente de descarga Cd , ya que esta variable depende del tipo de válvula de 0 1000 2000 3000 4000 5000 6000 t [s] Figura 3. Respuesta de velocidad sin carga admisión utilizada y es poco probable conocer su valor en un sistema instrumentado. Con base en lo anterior, (22) queda representada como la entrada de control (23). 17 FL SMC PID 16 15 (23) 14 13 [°] f f 2 f1 2 f 2 z1d ( w z1d ) k sgn( s ) x x2 uˆ 1 2 f 2 2 2 2 K3 K 6 K 5.max K5.min x 1 12 11 10 9 8 6. RESULTADOS Para verificar el desempeño de las técnicas de control analizadas, se realizó el seguimiento ante el siguiente perfil de velocidad: Vref 500 sen(2 0.0007) 2500 . En Fig. 3 se observa la respuesta de velocidad sin considerar torque de carga, de la cual se verifica una réplica en la forma de onda de referencia (trazo continuo) con un desfase para la acción de control PID (línea punteada) debido al retardo provocado por la componente integral. Asimismo, Fig. 4 ilustra las respectivas señales de control donde se observan fenómenos transitorios y amplitudes para los esfuerzos de control en estado estacionario. 7 0 1000 2000 3000 4000 5000 6000 t [s] Figura 4. Señales de control para seguimiento sin carga Sin embargo, también es posible evidenciar la degradación en el desempeño de la técnica de linealización por realimentación, cuando se consideran alteraciones paramétricas en el modelo según se muestra en la respuesta de Fig. 6, constatando la poca robustez para este tipo de estrategia de control. Por su parte, el control por modos deslizantes realiza corrección tanto a las perturbaciones aplicadas en la dinámica como a las incertidumbres de parámetros del modelo, demostrando sus características de robustez, aunque también evidencia un mayor retardo en el Octubre 14-16, 2015. Congreso Nacional de Control Automático, AMCA 2015, Cuernavaca, Morelos, México. estado transitorio de la respuesta mientras la trayectoria es atraída hacia la superficie de deslizamiento. técnica no es apropiada cuando se aplican perturbaciones que alejen al sistema de la zona de linealización. Se diseñó e implementó una técnica de control de linealización por realimentación sobre el MVEM. La técnica presentó un rendimiento evidentemente superior al de la acción PID, aún ante la acción de perturbaciones en la carga. Sin embargo, su desempeño no fue apropiado tras considerar incertidumbres paramétricas en el modelo. 4000 3500 3000 2500 [rpm] 97 2000 1500 1000 PID FL SMC Referencia 500 0 -500 0 1000 2000 3000 4000 5000 6000 Se diseñó e implementó una técnica de control por modos deslizantes sobre el MVEM. La técnica presentó un desempeño sobresaliente tanto para mitigar los efectos de la perturbación en la carga como las incertidumbres paramétricas en el modelo. También se evidenció un tiempo de retardo inicial para esta acción de control, durante la transición desde el estado inicial hacia la superficie de deslizamiento. t [s] Desarrollos complementarios incluyen el análisis y el control de la relación aire-combustible, combinando información para variables de presión y flujo en el MVEM. Figura 5. Respuesta de velocidad con carga 4000 REFERENCIAS 3500 3000 Agudelo, J.R., Lopez, J.D. & Espinosa, J.J., 2011. LQR control for speed and torque of internal combustion engines. In 18th IFAC World Congress. Milano, Italy, pp. 2230–2235. [rpm] 2500 2000 1500 1000 PID FL SMC Referencia 500 0 -500 0 1000 2000 3000 4000 5000 6000 t [s] Figura 6. Respuesta de velocidad con carga e incertidumbre 7. CONCLUSIONES Se realizó la caracterización dinámica del comportamiento del modelo de un motor de combustión interna a partir de la aproximación de valor medio (MVEM). Este modelo fue simulado en MATLAB® y a partir de ello se pudo identificar la región de operación para condiciones nominales de la relación entrada-salida correspondiente con el ángulo de la válvula de entrada de aire y la velocidad del cigüeñal, respectivamente. Se implementó un controlador PID sobre el MVEM, alrededor de un rango de operación nominal del modelo. El desempeño del controlador es aceptable para seguimiento sin perturbaciones de carga en el eje del cigüeñal, presentando sin embargo retardos debidos a la acción integral. Asimismo, los resultados demuestran que la Bergthorson, J.M. & Thomson, M.J., 2015. A review of the combustion and emissions properties of advanced transportation biofuels and their impact on existing and future engines. Renewable and Sustainable Energy Reviews, 42, pp.1393–1417. Cairano, S. et al., 2014. Model Predictive Control of Engine Speed During Vehicle Deceleration. IEEE Transactions on Control Systems Technology, 22(6), pp.2205–2217. Chaing, W.P., Zhu, L. & Patankar, R., 2007. Mean Value Engine Modeling and Validation for a 4-Stroke, Single Cylinder Gasoline Engine. Trends in Applied Science Research, 2(2), pp.124–131. Chen, H., Hovareshti, P. & Baras, J.S., 2010. Opportunistic communications for networked controlled systems of autonomous vehicles. In 2010 - Milcom 2010 Military Communications Conference. Ieee, pp. 1430–1435. Fu, J. et al., 2013. Energy and exergy analysis on gasoline engine based on mapping characteristics experiment. Applied Energy, 102, pp.622–630. Heywood, J.B., 1988. INTERNAL COMBUSTION ENGINE FUNDAMENTALS, McGraw Hill. Octubre 14-16, 2015. Congreso Nacional de Control Automático, AMCA 2015, Cuernavaca, Morelos, México. Hovareshti, P. & Baras, J.S., 2010. Distributed Collaborative Controlled autonomous vehicle systems over wireless networks. In 18th Mediterranean Conference on Control and Automation, MED’10. Ieee, pp. 1695–1700. Li, H. & Trentini, M., 2010. Tracking control of autonomous vehicles with slippage. In 2010 International Conference on Autonomous and Intelligent Systems, AIS 2010. Ieee, pp. 1–6. Passenbrunner, T.E., Sassano, M. & del Re, L., 2013. Optimal Control with Input Constraints applied to Internal Combustion Engine Test Benches. In 9th IFAC Symposium on Nonlinear Control Systems. Toulouse,France, pp. 463–468. Rajamani, R., 2006. Vehicle Dynamics and Control Mechanical. F. F. Ling, ed., Springer. 98 Anexo A. PARÁMETROS EMPLEADOS EN EL MVEM Parámetro Símbolo Valor Volumen de desplazamiento del cilindro Vd 1.4791x10-4 m3 Coeficiente de descarga 0.21 Capacidad calorífica Cd Q Relación aire/combustible AFR 43x106 JKg-1 14.8 Temperatura del múltiple Tmultiple 300 K Diámetro de la válvula Razón de calor específico D k 0.06501 m 1.4 Volumen del múltiple Vmultiple 0.05 m3 Inercia J 0.1 kgm2 Anexo B. CONSTANTES GLOBALES PARA EL MVEM Shu, L.I. et al., 2012. Model Predictive Control Based on Observer for Engine Idle Speed Control. In 31st Chinese control conference. pp. 4142–4147. Slimen, B. et al., 2010. A hierarchical control scheme based on prediction and preview: An application to the cruise control problem. In 2010 IEEE International Conference on Control Applications. Ieee, pp. 263– 268. Slotine, J.E. & Li, W., 1991. Applied Nonlinear Control, Prentice Hall. Sorenson, S. & Hendricks, E., 1990. Mean Value SI Engine Model For Control Studies. In American Control Conference. pp. 1882–1887. Überall, A. et al., 2015. A literature research about particle emissions from engines with direct gasoline injection and the potential to reduce these emissions. Fuel, 147, pp.203–207. Vijay, E.V. et al., 2010. Electronic control unit for an adaptive cruise control system & engine management system in a vehicle using electronic fuel injection. Interact-2010, pp.143–146. Xiaohong, J. & Tielong, S., 2011. Lyapunov-Design of Adaptive Air-Fuel Ratio Control for Gasoline Engines based on Mean-Value Model. In 30th Chinese Control Conference. pp. 6146–6150. Octubre 14-16, 2015. K1 fQ K2 RTmultiple AFR K3 K4 K5 Vd 4 RTmultiple Vmultiple Vd 120 RTmultiple Cd Pamb RTamb K6 D2 4 2k k 1