Modelos probabilístas comunes.
Anuncio

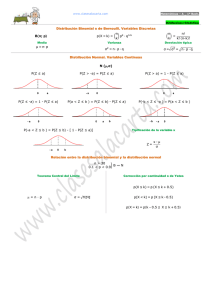
Probabilidad y Estadística Modelos Probabilistas Comunes MODELOS PROBABILÍSTAS COMUNES Frecuentemente, al analizar diversas situaciones reales, se hacen suposiciones acerca de los problemas, mismas que llevan a descripciones análogas y por tanto, a modelos matemáticos esencialmente iguales, en los que solamente los números, los valores de los parámetros y sus interpretaciones, difieren de aplicación a aplicación. Dentro de la teoría de la probabilidad también existen modelos, llamados distribuciones, que aparecen con tanta frecuencia que han recibido un nombre propio, y que pueden ser desarrollados y estudiados independientemente de la aplicación específica que se le de. Ya se ha dicho que el modelo probabilista que se selecciona debe representar de manera adecuada a la situación real, que puede ser discreta o continua. Resulta lógico, entonces, esperar que el modelo sea del mismo tipo1, es decir discreto o continuo. De aquí que los modelos probabilistas más comunes se clasifiquen como discretos y continuos. La identificación del modelo apropiado para analizar un problema es un punto de vital importancia en la solución del mismo, y puede atacarse comparando el histograma de frecuencias de los datos recopilados, con las gráficas de las distribuciones conocidas, para determinar cual de ellas es la que mejor se aproxima, o bien, reconociendo que en esencia la variable aleatoria asociada al problema, tiene alguna de las formas que se definen en dichos modelos. MODELOS PROBABILÍSTAS PARA VARIABLES ALEATORIAS DISCRETAS. 1 Distribución Bernoulli Sin lugar a dudas, el caso más sencillo de fenómeno aleatorio es aquel que tiene únicamente dos resultados posibles satisfactorio o insatisfactorio, alto o bajo, lento o rápido, bueno o malo, etc. – que en general puede denominarse éxito (e) y fracaso (f) teniendo asociada, cada uno de ellos, una probabilidad de ocurrencia p y q = 1 – p respectivamente. Este tipo de fenómeno recibe el nombre de experimento o ensayo de Bernoulli. 1 Aunque existen discretos que pueden representarse adecuadamente, mediante algún modelo continuo. M. en I. Isabel Patricia Aguilar Juárez 1 Probabilidad y Estadística Modelos Probabilistas Comunes Si denotamos con X a la v. a. que representa el número de éxitos que se presentan al realizar un ensayo de Bernoulli, se puede determinar inmediatamente que esta v. a. únicamente puede tomar los valores 0 y 1. Nótese que la probabilidad de que no se observe ningún éxito, es exactamente la probabilidad de que el resultado sea un fracaso, es decir, 1 – p, y la probabilidad de obtener un éxito es p, esto es: P(X=0)=1–p y P(X=1)=p de donde la función de probabilidad asociada a la v. a. X definida anteriormente, es la función p x (1 - p )( 1 - x) si x = 0, 1 fX ( x ) = 0 en otro caso. que tiene a p (la probabilidad de éxito), como único parámetro, y se conoce como Distribución de Bernoulli. Las características numéricas de una v. a. que tenga esta distribución se pueden obtener, independientemente de la aplicación que se le de, desde luego, dichas características estarán en función del parámetro de la distribución. Así, es posible, partiendo de la definición, demostrar que E(X) = p y también que Var(X) = p (1 – p). También se concluye que la función generadora de momentos de X es MX(θ)=peθ+(1-p) La importancia de este modelo radica en su gran utilidad dentro del desarrollo de otros modelos un poco más sofisticados, como los que presentaremos más adelante. 2 Distribución Binomial Un experimento o ensayo binomial es una sucesión de ensayos de Bernoulli, todos independientes entre sí y con la misma probabilidad de éxito p . Dentro de un ensayo binomial es posible plantearse varias preguntas tipo, que regularmente resultan de interés, como son: v ¿ Cuántos éxitos se observarán al realizar n repeticiones independientes de un ensayo de Bernoulli ? M. en I. Isabel Patricia Aguilar Juárez 2 Probabilidad y Estadística Modelos Probabilistas Comunes v ¿ Cuántas repeticiones del experimento se necesitarán para lograr obtener el primer éxito ? v ¿ Cuántas veces se tendrá que repetir el experimento, si se desea observar los primero r éxitos ? DISTRIBUCIÓN BINOMIAL Llamemos X a la v. a. que representa el número de éxitos que se observan al realizar n ensayos independientes de Bernoulli, cada uno con la misma probabilidad de éxito p, que todos los demás. Observemos que, por la forma en que se definió la v. a., los valores que pueda tomar X son, solamente los enteros positivos entre y n, inclusive. Pero lo que hasta ahora sabemos acerca de X no es suficiente para dar una respuesta satisfactoria a la pregunta concreta. Necesitamos conocer la distribución , y para lograrlo calcularemos la probabilidad de que la v. a. X tome un valor x cualquiera pero fijo. En n ensayos de Bernoulli independientes, la forma de obtener exactamente x éxitos, en general no es única, puesto que si acomodamos en un arreglo los resultados obtenidos en cada ensayo, nos daremos cuenta de que existen n exactamente arreglos diferentes que contengan el mismo número de éxitos. x Lo anterior significa que la probabilidad buscada es la suma de las probabilidades de n x (n - x) , X = 0, 1, ...., n p (1 - p ) x f X (x) = 0 , en otro caso cada uno de los arreglos con la propiedad deseada. Se puede observar, mediante el cálculo de las probabilidades de algunos de estos resultados que, debido a la independencia de los ensayos, la probabilidad de ocurrencia es la misma para todos los arreglos mencionados, la cual es px (1-p) (n-x), por lo tanto, la función de probabilidad asociada a esta variable aleatoria es conocida como Distribución Binomial con parámetros n y p , lo cual se denota como X ~ Bin (n, p) M. en I. Isabel Patricia Aguilar Juárez 3 Probabilidad y Estadística Para esta distribución se cumple que E(X) = np Modelos Probabilistas Comunes y Var(X) = np(1-p) Ejemplo 1 Suponga que los motores de avión operan en forma independiente y que fallan con una probabilidad igual a 0.4. Considerando que un avión realiza un vuelo con toda seguridad si por lo menos trabajo la mitad de sus motores, determine si un avión cuatrimotor o uno bimotor tiene la probabilidad más alta de efectuar un vuelo sin problemas. Resolución Sea X la v. a. Que representa el número de motores que fallan cuando el avión realiza un vuelo. Se observa que X es de la forma descrita en esta sección (número de éxitos en n ensayos). Por tanto, X ~ Bin(n, p) Caso 1: Si el avión es bimotor, n = 2 y p = 0.4 La probabilidad de que realice un vuelo seguro es P ( X ≤ 1). Pero P ( X ≤ 1) = P( X = 0 ) + P ( X = 1 ) 2 2 P ( X = 0 ) + P ( X = 1) = p 0 (1 - p )(2 - 0) + p1 (1 - p )(2-1) = 0.84 0 1 Caso 2 : Si el avión es tetramotor, n = 4 y p = 0.4 La probabilidad de que realice un vuelo seguro es P ( X ≤ 2). Pero P ( X ≤ 2) = P ( X = 0) + P ( X = 1) + P ( X = 2) 4 4 4 = p 0 (1 - p )(4 - 0) + p1 (1 - p )(4-1) + p 2 (1 - p )(4-2) 2 1 0 = 0.8208 Por lo tanto la probabilidad de realizar un vuelo seguro es más alta para el avión bimotor que para el tetramotor, aunque la diferencia es bastante pequeña. M. en I. Isabel Patricia Aguilar Juárez 4 Probabilidad y Estadística 3 Modelos Probabilistas Comunes Distribución Geométrica Dentro del mismo Proceso Binomial analicemos la segunda pregunta planteada. Para ello definamos a la variable aleatoria X como el número de repeticiones del experimento se necesitarán para lograr obtener el primer éxito. Evidentemente, si se requiere observar exactamente un éxito, el número de veces que se debe repetir el experimento es al menos 1, pero es posible que se requieran más repeticiones. Por lo tanto los valores que puede tomar la variable aleatoria son todos los enteros positivos. Esto es RX = ù. Para que esta información sea de utilidad, se requiere ahora describir el comportamiento de la variable aleatoria. Para ello, a continuación procedemos a construir la función de probabilidad de dicha variable aleatoria X. Nos interesa, entonces, calcular la probabilidad de que se requieran x repeticiones del experimento para obtener el primer éxito. Es claro que si se requiere realizar x veces el experimento con el fin de observar el primer éxito, es porque en las primeras (x – 1) repeticiones el resultado fue un fracaso, y solamente en el x – ésimo, el resultado es un éxito. La probabilidad de este resultado es p (1 – p )x. Por lo tanto la función de probabilidad de X es f X (x) = x = 1,2 , 3 , ... p (1 - p ) ( x - 1) , 0 , en otro caso que recibe el nombre de Distribución Geométrica con parámetro p. La forma de denotar el hecho de que la v.a. X tiene como función de probabilidad a la distribución geométrica con parámetro p es X ~ G( p ). En estos términos, las principales características numéricas de X son E(X) = 1 / p y Var ( X ) = 1- p p2 Ejemplo 2 Supóngase que el costo de efectuar un experimento es $1,000. Si el experimento falla, se incurre en un costo adicional de $300 debido a ciertos cambios que deben efectuarse antes de que se intente un nuevo ensayo. Si la probabilidad de éxito en M. en I. Isabel Patricia Aguilar Juárez 5 Probabilidad y Estadística Modelos Probabilistas Comunes cualquiera de los ensayos es 0.2, si los ensayos aislados son independientes y si los experimentos continúan hasta que se obtiene el primer resultado exitoso, ¿cuál es el costo esperado del procedimiento completo? Resolución Si denotamos con C al costo del procedimiento, y con X al número de ensayos necesarios para obtener éxito por primera vez, se tiene que C = 1,000 X + 300 ( X – 1 ) = 1,300 X – 300 Por lo tanto, E ( C ) = 1,300 E ( X ) – 300 y por las condiciones del problema, es fácil identificar a la v. a. X como una v. a. con distribución geométrica con parámetro p = 0.2, con lo que se tiene que E ( X ) = 1 / 0.2 y E ( C ) = 1,300 ( 1 / 0.2 ) – 300 = $ 6,200 4 Distribución Binomial Negativa Consideremos ahora la variable aleatoria X que representa el número de veces que se debe repetir el experimento, con el fin de observar los primeros r éxitos. Para construir la función de probabilidad de X, es necesario conocer con toda claridad el rango de dicha variable aleatoria, para posteriormente calcular la probabilidad de que X sea igual a x para cada valor posible de la v.a. Si se requieren x repeticiones del experimento para lograr observar los primeros r éxitos, esto significa que de los x ensayos r son éxitos y x – r son fracasos. Sin embargo, solamente el r-ésimo éxito está fijo en el último ensayo, los (r – 1) éxitos x - 1 r - 1 restantes se encontrarán en igual número de ensayos, pero existen exactamente formas distintas de obtener un resultado así. Por lo tanto, la función de probabilidad de X es M. en I. Isabel Patricia Aguilar Juárez 6 Probabilidad y Estadística Modelos Probabilistas Comunes x - 1 r p (1 - p ) (x - r) , X = r, r + 1, r + 2.... r 1 − f X (x) = 0 , en otro caso que recibe el nombre de Distribución Binomial Negativa con parámetros r y p. Lo anterior se denota como X ~ Bin Neg (r, p). Para una variable aleatoria con distribución Binomial Negativa, se tienen las siguientes características numéricas: E(X) = r / p y Var ( X ) = r (1 - p ) p2 Ejemplo 3 Un pediatra desea reclutar cinco parejas, cada una de las cuales estén esperando su primer hijo, para participar en un nuevo régimen natural para recién nacidos. La probabilidad de que una pareja acceda a participar en dicho programa es 0.2. ¿Cuántas parejas deberá entrevistar para lograr reclutar a las cinco que necesita?, ¿Cuál es la probabilidad de que necesite entrevistar quince parejas para lograr completar las cinco que necesita? Resolución Sea X la variable aleatoria que representa el número de parejas que deben entrevistarse para completar las cinco que acepten participar en el programa. Es claro que X tiene distribución Binomial Negativa con r = 5 y p = 0.2. La primera parte del problema se resuelve calculando el valor esperado de X E ( X ) = r / p = 5 / 0.2 = 250 es decir, debe esperar tener que entrevistar 250 parejas para completar las 5 que estén de acuerdo en participar en el programa que propone el pediatra. La segunda parte se resuelve calculando P ( X = 15 ) M. en I. Isabel Patricia Aguilar Juárez 7 Probabilidad y Estadística Modelos Probabilistas Comunes 14 ( 0.2 )5 ( 0.8 )10 = 0.034 4 P ( X = 15 ) = 5 Distribución Poisson El Proceso de Poisson consiste en la ocurrencia aleatoria de eventos a lo largo de un intervalo continuo, e manera que se reúnen las siguientes características: 1. Estacionaridad: La probabilidad de que ocurra un evento en un intervalo de longitud pequeña t, es λt, con λ constante. 2. Unicidad: La probabilidad de que ocurra más de un evento en un intervalo muy pequeño de longitud h es despreciable comparada con la probabilidad de que ocurra solo uno. 3. Independencia: La ocurrencia de un evento en un intervalo dado, no depende de la ocurrencia en intervalos anteriores, ni posteriores. Existen muchos ejemplos de procesos de Poisson, como son: ü Las llegadas de los clientes a un autoservicio. ü La llegada de llamadas telefónicas a un conmutador. ü Los electrones producidos por el choque de partículas. Sea X la v.a. que representa el número total de eventos que ocurren en un intervalo de longitud t. Como se puede ver, X es una v. a. discreta, y su función de probabilidad es ( λ t ) x - λt e x ! f X ( x) = 0 ; x = 0, 1, 2, ..... ; en otro caso Una característica muy especial de esta distribución es que tanto la media como la varianza son iguales a λt . M. en I. Isabel Patricia Aguilar Juárez 8 Probabilidad y Estadística Modelos Probabilistas Comunes Ejemplo 4 Suponga que las moléculas de un gas raro se encuentran a razón promedio de tres por pie cúbico de aire. Si se supone que las moléculas están distribuidas independientemente y al azar en el aire, ¿cuál es la probabilidad de que, en una muestra de un pie cúbico de aire, se encuentre como máximo una molécula de dicho gas? Resolución Sea X la v. a. que representa el número de moléculas del gas raro, que se encuentran en un pie cúbico de aire. X tiene distribución de Poisson con parámetro λ = 3, lo cual se denota como X ~ P (λt) con λ = 3 y t = 1. La probabilidad que se desea calcular es P ( X ≤ 1), lo cual se obtiene como sigue: P ( X ≤ 1) = P ( X = 0) + P ( X =1) = ( λ t ) 0 e - λ t ( λ t )1 e - λ t + = 0.199 0! 1! Se puede demostrar que en general la distribución de Poisson resulta una buena aproximación a la distribución binomial, si n es grande y p pequeña. Una regla práctica admisible es utilizar dicha aproximación si n ≥ 20 y p ≤ 0.05. MODELOS PROBABILÍSTAS PARA VARIABLES ALEATORIAS CONTINUAS. 6 Distribución Exponencial En la sección anterior se habló del proceso de Poisson, y se tipificó una v. a. discreta, en relación con dicho proceso. Sin embargo, en el marco de ese mismo proceso es posible definir otras variables aleatorias solo que, en este caso, continuas, las cuales son de gran importancia en el campo de las aplicaciones de la probabilidad. Una de esas variables es la distribución exponencial. M. en I. Isabel Patricia Aguilar Juárez 9 Probabilidad y Estadística Modelos Probabilistas Comunes Definamos a la v, a. T como el tiempo que transcurre entre dos ocurrencias sucesivas de un evento, en un proceso de Poisson. Nótese que la variable aleatoria puede adoptar cualquier valor real positivo. Una forma sencilla para conocer su distribución de probabilidad, consiste en relacionarla con la v. a. X con distribución de Poisson analizada antes. Al hacerlo, λ e - λt ; t > 0 fT ( t) = 0 ; en otro caso construyendo la función de distribución (acumulativa) de T y derivando con respecto a t, se obtiene la función de densidad de T, como Conocida como Distribución Exponencial con parámetro λ. El hecho de que una v. a. T tenga esta distribución se indica como T ~ exp ( λ ). Además si una v. a. T tiene este tipo de distribución, se puede calcular que E(T) = 1 / λ y Var(T) = 1 / λ2 Ejemplo 5 Supóngase que un diseñador puede tomar una decisión entre dos procesos de manufactura para la fabricación de cierto componente. Empleando el proceso A cuesta C dólares por unidad fabricar un componente. Empleando el proceso B, cuesta kC dólares por unidad fabricar un componente cuando k > 1. En promedio, los componentes sufren 200-1 fallas por hora para el proceso A y 300-1 fallas por hora para el proceso B. Debido a una cláusula de garantía, si un componente dura menos de 400 horas, el fabricante debe pagar una pena de R dólares. ¿cuál proceso deberá elegir el diseñador? Resolución Sean TA la v. a. que representa el tiempo que dura el componente fabricado por el proceso A. y TB la v. a. que representa el tiempo que dura el componente fabricado por el proceso B. M. en I. Isabel Patricia Aguilar Juárez 10 Probabilidad y Estadística Modelos Probabilistas Comunes El costo total CA en que incurre el fabricante al utilizar el proceso A es C si TA ≥ 400 o bien C + R si TA < 400 Por lo tanto, E(CA) = C [ P(TA ≥ 400) ] + ( C+R )[ P(TA < 400) ] = Ce-2 + (C + R )(1 – e-2) De manera similar se tiene que el costo total CB en el que incurre el fabricante al utilizar el proceso B es kC si TB ≥ 400 o bien kC + R si TB < 400 Por lo tanto, E(CB) = kC[P(TB ≥ 400)] + (kC+R)[ P(TB < 400)] = kCe-4/3 + (kC + R )(1 – e-4/3) Comparando, se tiene que el diseñador debe preferir el proceso B si E(CB) < E(CA) Lo cual ocurre si y sólo si k < 1 + [(R / C)( e-4/3 - e-2 ) . 7 Distribución Normal La distribución más importante en el campo de la estadística, es la distribución Normal. Su gráfica es una curva en forma de campana, que describe la distribución de muchos conjuntos de datos que ocurren en la naturaleza, la industria y la investigación. La expresión analítica más simple cuya gráfica tiene la forma acampanada, es la Gaussiana dada por y=e −x 2 2 y es la expresión que se adopta como modelo probabilista. Para que la campana Gaussiana se adapte a la población, es necesario introducir tres parámetros: M. en I. Isabel Patricia Aguilar Juárez 11 Probabilidad y Estadística Modelos Probabilistas Comunes a: parámetro de localización que centre la gráfica en la media de la distribución de la población, b: parámetro de contracción o dilatación que determine el ancho de la curva, c: parámetro de normalización para que el área bajo la curva sea unitaria. De manera que f (x) = 1 x −a − 2 b ce 2 en donde es claro que a debe ser la media y b la desviación estándar de la población, esto es, a = µ y b = σ2 . Para obtener el valor de c, se utiliza el hecho de que la curva debe integrar uno 1= ∞ ∞ ∫-∞ f (x) dx = ∫-∞ ce 1 x − a − 2 b 2 dx haciendo un cambio de variable = bc ∞ ∫-∞ e − 1 2 z 2 dz = bc 2π de donde, c= 1 . b 2π Por lo que la expresión de la función de densidad Normal es : f (x) = 1 σ 2π 1 x −µ − 2 σ e 2 si −∞ < X < ∞ Esta función se conoce como Distribución Normal con media µ y varianza σ2 y tiene la característica de ser simétrica con respecto a la media. El hecho de que una v.a. tenga a este función como distribución se denota como X ~ N ( µ , σ2 ) y tiene como función generatriz de momentos a la función: M. en I. Isabel Patricia Aguilar Juárez 12 Probabilidad y Estadística Modelos Probabilistas Comunes M X (θ) = e θµ + θ2 σ 2 2 DISTRIBUCIÓN NORMAL ESTÁNDAR Se llama Distribución Normal Estándar a aquella distribución normal, cuyos parámetros son µ = 0 y σ 2 = 1 . Esta distribución es tan importante, que la v.a. que tiene esta distribución, recibe el nombre especial de Z. Supongamos que deseamos calcular la probabilidad de que la v.a. Z tome valores entre dos valores z1 y z2, se tendría lo siguiente: P( z1 < Z < z 2 ) = z2 ∫z 1 1 − z 1 e 2 dz σ 2π 2 que sólo se puede calcular numéricamente. Para evitar el cálculo de la integral cada vez que este se requiera, existen valores ya tabulados tanto para la función como para el área bajo ella misma, para valores específicos, que facilitan el cálculo para los valores necesarios. Dicha tabla se encuentra anexa, y aquí se ejemplificará su uso, continuación. Ejemplo 6 Encuentre la probabilidad de que una v.a. con distribución normal estándar tome un valor entre 0.87 y 1.28. Resolución P( 0.87 < Z < 1.28 ) = P( Z < 1.28 ) – P( Z < 0.87 ) Buscando en la tabla, en el renglón correspondiente a z = 0.8 en donde cruza con la columna del 7, tenemos que P( Z < 0.87 ) = 0.8078 De la misma forma, si seleccionamos el valor que aparece en el cruce del renglón z = 1.2 y la columna 8, se obtiene M. en I. Isabel Patricia Aguilar Juárez 13 Probabilidad y Estadística Modelos Probabilistas Comunes P( Z < 1.28 ) = 0.8997 De donde P( 0.87 < Z < 1.28 ) = 0.8997 – 0.8078 = 0.0919 Solamente que estas tablas son únicamente para una distribución normal estándar, por lo que si la distribución no es estándar se requiere hacer una estandarización como sigue: Si X ~ N ( µ, σ2 ), pero logramos recorrerla de tal manera que quede centrada en el origen, y la ampliamos o la contraemos, según se requiera, para que tenga varianza 1, podríamos calcular las probabilidades deseadas, como se mostró en el ejemplo anterior. El procedimiento que mencionamos anteriormente, sí es factible y se conoce como ESTANDARIZACIÓN. Si X ~ N ( µ, σ2 ), la v.a. Z = X−µ ~ N(0, 1) σ Lo que significa que: P(x1 < X < x2 ) = P(z1 < Z < z2 ) En donde z1 = x1 − µ , σ y z2 = x2 − µ σ Ejemplo 7 Con frecuencia se supone que las mediciones de la longitud usando un instrumento calibrado con la suficiente exactitud, están distribuidas en forma normal alrededor de la longitud “verdadera” del objeto medido. En forma concreta, suponga que la longitud verdadera de un objeto es de 9 pies, y que una medición que se haga de este objeto es una v.a. X normal con media nueve y varianza 0.0004 (ambas dadas en pies). ¿Cuál es la probabilidad de que la longitud medida esté entre 8.99 y 9.02 pies ?. Resolución Sea X la v.a. que representa la longitud medida. X tiene distribución normal no estándar. M. en I. Isabel Patricia Aguilar Juárez 14 Probabilidad y Estadística Modelos Probabilistas Comunes P( 8.99 ≤ X ≤ 9.02) = P( X ≤ 9.02 ) − P( X ≤ 8.99 ) 9.02 − 9 8.99 − 9 = P Z ≤ − P Z ≤ 0.02 0.02 = 0.8413 − 0.3085 = 0.5328 Una propiedad importante de la distribución siguiente teorema. normal, es la que se enuncia en el Teorema: Si X1, X2,...,Xn son variables aleatorias independientes, y todas con distribución normal cada una con media µi y varianza σ2X i , i = 1,2,...,n, la v.a. X definida como X= c1X1+c2X2+...+cnXn n También tiene distribución normal, con media ∑ ci µi n y varianza i =0 ∑ ci2σ2X i . i =1 Demostración: Para demostrar el teorema, basta con construir la función generatriz de momentos de X, a través de las funciones generatrices de momentos para las Xi’s, e identificarla con la función generatriz asociada a una distribución normal. M X (θ) = n n ∏ M X ( θ) = ∏ e i =1 i θ c i µi + θ2 c i2 σ 2X i 2 n =e θ∑ c i µi + i =1 θ2 n 2 2 ∑ c i σ Xi 2 i =1 i =1 que corresponde a la función generatriz de momentos de una v.a. con distribución normal, con media y varianza, las que se mencionaron. Este resultado es válido únicamente cuando las variables aleatorias que se suman, tienen distribución normal. Sin embargo, existe un teorema fundamental en la probabilidad y que es un resultado mucho más general y que enunciamos a continuación. M. en I. Isabel Patricia Aguilar Juárez 15 Probabilidad y Estadística Modelos Probabilistas Comunes TEOREMA DEL LÍMITE CENTRAL Sean X1,X2,...,Xn son variables aleatorias independientes, y con la misma distribución (ya sea discreta o continua), cada una con media µ y varianza σ2. La v.a. Sn definida como n Sn = ∑ Xi , i =1 cuando n tiende a infinito, tiene aproximadamente una distribución normal con media nµ y varianza nσ2, es decir, n Z= ∑ X i − nµ i =1 σ n tiene aproximadamente, una distribución normal estándar cuando n tiende a infinito. Este resultado permite aproximar adecuadamente, distribuciones tanto discretas como continuas, mediante la distribución normal. Un ejemplo es el caso concreto de la distribución binomial, que para un valor grande de n se logra una buena aproximación. M. en I. Isabel Patricia Aguilar Juárez 16