0 (cero)
Anuncio
")
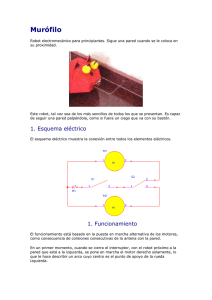
0 (cero) Robot tremendamente sencillo, que solo necesita un motor. Se puede hacer fácilmente, a parir de los restos de un juguete. Invierte su sentido de movimiento cuando colisiona con un obstáculo. 1. Esquema eléctrico 2. Funcionamiento Cuando 0 (cero) se pone en funcionamiento gracias al interruptor de puesta en marcha, avanza hasta encontrar un obstáculo (por ejemplo una pared). En el momento en el que colisiona, el parachoques retrocede, lo que hace que se accione la palanquita del final de carrera. El motor invierte su sentido de giro, por lo que el robot retrocede. 3. Componentes Un motor con su juego de engranajes y las ruedas correspondientes. Hay juguetes muy baratos de importación de los que se puede extraer un motor con reductora. Yo he comprado alguno por menos de un Euro (o un Dólar). Unas ruedas con su eje que giren libremente. Yo he incluido dos trocitos de pajita rosa, para que hagan de cojinetes, pero es fácil encontrar otros sistemas. Un final de carrera. Son fáciles de conseguir en tiendas de componentes electrónico (busca en alguna guía de teléfonos local). Un interruptor para poner a 0 (cero) en marcha o pararlo. Esta información se ha obtenido de la web: http://roble.pntic.mec.es/~jsaa0039/cucabot/ 1 Para alimentar el circuito eléctrico se utilizarán dos pilas de petaca de 4'5 voltios. Si el motor que vas a utilizar funciona mejor a otro voltaje, deberías seleccionar dos pilas que tengan el voltaje adecuado para tu motor (¿Cómo eran las pilas del juguete de donde has sacado el motor?). Además para la estructura necesitarás chapa de madera (okumen) y menos de un metro de cuadradillo de 1 cm. El cuadradillo es un listón de madera con la sección cuadrada, en este caso de un cm de lado. Para unir los componentes de la estructura usaremos cola blanca y cola térmica. 4. Montaje El sistema sensor de colisión es puramente mecánico y está fabricado en madera (una pieza de chapa de okumen de 19 cm x 7,8 cm y una estructura deslizante fabricada con un cuadradillo de madera de pino de 1 cm de lado). Para la fabricación de los parachoques, se cortan en el cuadradillo piezas con las siguientes longitudes. • • • • Una de 23 cm es el eje longitudinal Dos de 12 cm que son los parachoques propiamente dichos Dos de 3,1 cm para los arcos que hacen de guía al eje longitudinal Cuatro de 1 cm para el soporte de los arcos antes mencionados Una de 2 cm para accionar el final de carrera La unión de los parachoques al eje longitudinal está realizada a "media madera", como se ve en la fotografía. Esto da cierta robustez y evita que el parachoques salga volando. Es fácil de hacer con un serrucho y una lima. Cuando se tiene la forma, se unen con cola blanca. Los dos arcos que fijan al eje longitudinal se hacen de forma que haya una holgura de cerca de 1 mm, esto se consigue al fijar los taquitos laterales del arco con cola blanca, y pegando con cola térmica el arco así formado a la base. La cola térmica eleva el arco lo suficiente como para que el eje longitudinal pueda deslizarse sin problemas. Una vez montado, probado y ajustado el eje longitudinal se fija el tope accionador del final de carrera, y el propio final de carrera, asegurando que se pueda accionar correctamente, para ello es conveniente girarle unos 10 mm. Esta información se ha obtenido de la web: http://roble.pntic.mec.es/~jsaa0039/cucabot/ 2 Esta estructura, se puede utilizar directamente en una Plataforma Móvil Universal , o bien, dada la sencillez del sistema de tracción se pueden utilizar los restos de algún juguete, que se pueden pegar fácilmente por la parte inferior con cola térmica. En la parte superior, también con cola térmica, se fijan directamente las pilas de petaca y el interruptor. Posteriormente se realizan las conexiones siguiendo el esquema eléctrico ya mencionado. Esta información se ha obtenido de la web: http://roble.pntic.mec.es/~jsaa0039/cucabot/ 3 Murófilo Robot electromecánico para principiantes. Sigue una pared cuando se le coloca en su proximidad. Este robot, tal vez sea de los más sencillos de todos los que se presentan. Es capaz de seguir una pared palpándola, como si fuera un ciego que va con su bastón. 1. Esquema eléctrico El esquema eléctrico muestra la conexión entre todos los elementos eléctricos. 2. Funcionamiento El funcionamiento está basado en la puesta en marcha alternativa de los motores, como consecuencia de colisiones consecutivas de la antena con la pared. En un primer momento, cuando se cierra el interruptor, con el robot próximo a la pared que está a la izquierda, se pone en marcha el motor derecho solamente, lo que le hace describir un arco cuyo centro es el punto de apoyo de la rueda izquierda. Esto hace que la antena choque con la pared y se accione el final de carrera. Con el final de carrera accionado, se para el motor derecho y empieza a avanzar el izquierdo, con lo que el nuevo eje de giro está en el punto de apoyo de la rueda derecha. El robot avanza un poco separándose de la pared. En el momento en el que se separa lo suficiente como para el final de carrera regrese a su posición de reposo, se inicia el ciclo de nuevo. Esta información se ha obtenido de la web: http://roble.pntic.mec.es/~jsaa0039/cucabot/ 4 De esta manera el robot avanza dando "pasos" al accionar los dos motores alternativamente, y sin separarse de la pared. 3. Componentes Además de los motores que se encuentran en la plataforma, sólo se emplean los siguiente elementos: • Un final de carrera, con accionamiento por palanca, de tamaño pequeño. • Una pila de petaca. • Un pequeño interruptor para abrir y cerrar el circuito. Además, se utilizará cable de telefonía o similar para realizar las conexiones, que irán soldadas, alambre galvanizado para fabricar las antenas y un par de cm de macarrón termorretráctil. También unos trocitos de lámina plástica con velcro adherido en una cara, para montar en ellos el interruptor y el final de carrera, con un pequeño tope que puede cortarse por ejemplo de un rotulador, como se verá más adelante. 4.- Montaje 4.1. Los preparativos Para el montaje es necesario preparar una antena sobre su final de carrera como viene descrito en la página de Pegatortas . El interruptor y la antena-final de carrera, se montan sobre sus láminas de plástico (p.e. con cola térmica) a las que se le ha puesto el velcro auto-adhesivo. Es conveniente colocar un pequeño tope en la lámina donde va montado el final de carrera, para que se eviten movimientos bruscos en la palanquita, al moverse el robot. 4.2. Las conexiones Se coloca la pila y las láminas del interruptor y antena sobre la base como se ve en la figura y se realizan las conexiones de acuerdo con el esquema eléctrico. Esta información se ha obtenido de la web: http://roble.pntic.mec.es/~jsaa0039/cucabot/ 5 Vista general del cableado Vista anterior Vista posterior 4.3. La forma de la antena Dobla la antena aproximadamente formando un ángulo recto, con longitudes en los dos tramos de unos 11 cm. Una forma redondeada en el extremo de la antena ayuda a evitar enganchones. Esta información se ha obtenido de la web: http://roble.pntic.mec.es/~jsaa0039/cucabot/ 6 Pegatortas Robot electromecánico para principiantes. Es capaz de evitar los obstáculos cuando choca con ellos Consta este robot de dos "antenas" que hacen el papel de sensores táctiles de colisión. De forma que cuando está en funcionamiento y colisiona con un obstáculo por un lado, el robot gira en sentido contrario hasta evitar el obstáculo y sigue su camino. Es tremendamente sencillo y se emplean muy pocos componentes lo que le hace especialmente interesante como proyecto de iniciación. 1. Esquema eléctrico Este robot está basado en un circuito muy simple como se ve a continuación: En él se ven todos los elementos de que consta y cómo están interconectados entre sí. Observa que el motor derecho va conectado al conmutador de la antena izquierda y el motor izquierdo con la antena derecha. El interruptor de puesta en marcha sale de la conexión entre las dos pilas que son de 4,5 voltios. 2. Funcionamiento El circuito completo del robot Pegatortas consta de dos motores como el anteriormente visto, en el que además se ha añadido un interruptor de puesta en marcha. 2.1. Comportamiento del robot Como se ha hecho notar el conmutador de la antena de un lado está conectado con el motor del lado contrario. Esta información se ha obtenido de la web: http://roble.pntic.mec.es/~jsaa0039/cucabot/ 7 En el momento en el que se cierra el Supongamos que la antena interruptor de puesta en marcha, los derecha colisiona con un dos motores se ponen en obstáculo funcionamiento haciendo avanzar a la plataforma en línea recta. Esto cambia la posición del conmutador que le corresponde al motor izquierdo haciéndole girar en sentido contrario. Tenemos en esta situación que el motor derecho gira en sentido de avance, mientras que el motor izquierdo a consecuencia de la colisión gira en sentido de retroceso. En esta situación la plataforma gira hacia la izquierda, hasta que se evite el obstáculo y por lo tanto el conmutador vuelva a su posición original, con lo que la plataforma seguirá de nuevo su camino recto, hasta encontrar un nuevo obstáculo. 3. Componentes Además de los motores que se encuentran en la plataforma, sólo se emplean los siguiente elementos: • Dos finales de carrera. Ejercen el papel de conmutadores. Disponen de tres patillas en donde se hacen las conexiones. La que está mas apartada es el común (se corresponde con el terminal 1 de los esquemas). La patilla del otro extremo es el borne NC (normalmente cerrado), es decir que deja pasar la corriente cuando no se acciona la palanquita. El del centro es el borne NA. • Dos pilas de petaca de 4,5 V. • Un pequeño interruptor. • Y unos cincuenta cm de alambre galvanizado del Nº 8 (diámetro 1,3 mm) para las antenas, cable telefónico para las conexiones y macarrón termorretráctil. 4. Montaje Sigue los siguientes pasos para su montaje: 4.1. Prepara las antenas sensoras Corta dos trozos de unos 25 cm de longitud, del alambre galvanizado. Pega con cola térmica longitudinalmente, sobre la cara exterior de la palanquita de los finales de carrera, y refuerza la unión con un par de centímetros de macarrón termorretráctil. Haz lo mismo con los dos finales de carrera. Pega con la cola térmica los dos finales de carrera sobre una Esta información se ha obtenido de la web: http://roble.pntic.mec.es/~jsaa0039/cucabot/ 8 piececita de plástico, como se ve en la figura. En la otra cara de la pieza de plástico, coloca unas tiras de velcro para que se pueda adherir a la base de la plataforma. 4.2. Prepara el interruptor Pega un poco de velcro en el centro de una de sus caras. 4.3. Realiza las conexiones Coloca las antenas, el portapilas y el interruptor fijados con el velcro en la posición que ocuparán. Estaña todas las conexiones excepto la de los motores tal como se ve en las figuras, ayudándote por el esquema eléctrico, para hacer verificaciones. Observa el tercer cable que sale desde el portapilas. Hay que ponerlo en la conexión que une las dos pilas. Como no es posible soldarlo por lo general, es suficiente con enrollarlo al muelle. Cuando se coloca la pila el muelle se comprime y hace buena conexión. Asegúrate de que las conexiones de los motores hacen avanzar la plataforma cuando se cierra el interruptor. Si no es así, lo único que hay que hacer es invertir los cables. Esta información se ha obtenido de la web: http://roble.pntic.mec.es/~jsaa0039/cucabot/ 9 4.4. Dobla las antenas Las antenas son de un alambre que se puede trabajar con relativa facilidad con la mano. Dales forma, para que accionen los finales de carrera cuando se produzca una colisión. Ten cuidado cuando las manipules de no hacer palanca sobre los finales de carrera, las palanquitas se pueden romper o el alambre despegar. Esta información se ha obtenido de la web: http://roble.pntic.mec.es/~jsaa0039/cucabot/ 10 Fotótropo Robot que sigue una luz, proveniente por ejemplo de un flexo o una linterna que se colocan frente a él. Esta propuesta muestra cómo se puede construir un robot que tiene un comportamiento bien definido (ir a un foco de luz intenso), con muy pocos componentes electrónicos, y en una configuración que resulta sencilla de construir y comprender. 1. Esquema electrónico En el esquema puedes ver los elementos de que consta el circuito y la interconexión entre ellos. Los componentes esenciales son la fotorresistencia LDR y el transistor NPN (Realmente se trata de un transistor especial que está formado por dos en cascada, en una configuración que se llama par Darlington, y que amplifica la corriente más que un transistor normal). Observa que los motores tienen dos circuitos independientes regulados de forma conjunta por un interruptor doble. Nota que el motor MT2 está alimentado con una tensión de 1,5 voltios, mientras que el circuito del otro motor se alimenta por las dos pilas en serie. Es decir 3 voltios. El diodo D1 está puesto para proteger al transistor de los picos de corriente que produce el motor MT1 en el momento en que se desconecta. 2. Funcionamiento Cuando se acciona el interruptor, se pone en marcha el motor alimentado a 1,5 voltios, ya que se cierra el circuito en el que está. También se cierra el circuito que alimentado a 3 voltios controla el segundo motor. En el momento en que llega una iluminación suficientemente grande a la fotorresistencia (LDR) el transistor (par Darlington) se pone a conducir corriente por el colector y por lo tanto se pone en funcionamiento este motor Esta información se ha obtenido de la web: http://roble.pntic.mec.es/~jsaa0039/cucabot/ 11 también. Bajo esta situación los dos motores están en marcha y el robot avanza. No lo hace exactamente en línea recta, ya que la alimentación de cada motor tiene distinto voltaje. El voltaje diferente de cada motor hace que se vaya corrigiendo la dirección constantemente y vaya mejor hacia el foco luminoso. 3. Componentes Se detalla seguidamente cada uno de los elementos que se utilizan: Lo primero de lo que hay que disponer es de una plataforma montada y operativa para colocar en ella el resto de elementos. Además debes disponer de: • Un interruptor doble, es decir que sea capaz de abrir y cerrar dos circuitos simultáneamente. • Échale un vistazo al esquema del circuito. • Una fotorresistencia, también conocidas como LDR, que es realmente el sensor que detecta la luz. Dadas las características del circuito y la posibilidad de ajustar la resistencia variable, casi cualquiera valdrá. • Un diodo. Vale por ejemplo el 1N4007. • Una resistencia de 1 kilo ohmnio, 1/4 de vatio. • Una resistencia variable de 10 kilo ohmnios. • Un transistor, Darlington TIP 120. • Un portapilas para dos pilas de 1,5 voltios tamaño AA Además se utilizará cable telefónico, belcro y macarrón termorretráctil. Montaje 4.1. Prepara la fotorresistencia Las fotorresistencias suelen poseer dos patillas largas y peladas. Interesa que sean largas, pero no que se toquen, ya que falsearían el funcionamiento del robot. Por ello es necesario enfundar al menos una. Se puede hacer por ejemplo con un macarrón obtenido al pelar uno de los cables de telefonía que se emplean. Esta información se ha obtenido de la web: http://roble.pntic.mec.es/~jsaa0039/cucabot/ 12 Es interesante poner una pequeña visera de unos 2 mm aproximadamente a la fotorresistencia, para que sea sensible sobre todo a la luz que venga en una dirección. Para esto el macarrón termorretráctil en insustituible. 4.2. El circuito electrónico Para montar el circuito electrónico existen distintas posibilidades. Tal vez la más interesante sea sobre una placa perforada de cuadros, aunque también se puede hacer sobre una placa de circuito impreso diseñada para este circuito específico, entre otras posibilidades. 4.3. Sobre placa perforada de cuadros Se utiliza una placa perforada en la que se colocan los componentes y se van conectando por la parte inferior. Posteriormente se recorta al tamaño adecuado con una sierra para metal, se liman los bordes y ya está dispuesta para ser utilizada. Sobre la placa va conectada la resistencia, el diodo, la fotorresistencia, la resistencia variable y el par Darlington. El resto de elementos (motores, interruptor y portapilas) se conectan por medio de cableado. En la siguiente figura se ve la disposición de los componentes sobre la placa. El hecho de que estén próximos y estratégicamente colocados facilita el conexionado. Para hacer las conexiones es imprescindible echar un vistazo al esquema electrónico. De todas formas la siguiente figura ayuda. En ella se ve la disposición de los componentes y las conexiones que hay que hacer desde la cara inferior y es muy útil a la hora de soldar. 4.4. Sobre placa de circuito impreso A modo de ejemplo se muestra un posible montaje del circuito sobre una placa de circuito impreso diseñada a tal efecto. Observa que el interruptor doble ha sido sustituido por un bloque de dos microinterruptor de montaje en placa de circuito impreso. En este caso se puede hacer que los dos motores funcionen o no de forma independiente. Esta información se ha obtenido de la web: http://roble.pntic.mec.es/~jsaa0039/cucabot/ 13 En esta figura se muestran más claramente las conexiones, vistas desde el lado donde se montan los componentes. Se puede utilizar para la fabricación de una placa de circuito impreso, pero ojo que hay que ponerla a la escala adecuada y darle la vuelta (encontrar su simétrica). 4.5. Conecta el circuito electrónico al resto En las siguientes figuras se ve el trazado de los cables que van a los motores, interruptor y portapilas. Son ilustrativas, para salir de toda duda, es imprescindible consultar el esquema general del circuito. Asegúrate de que los motores se conectan correctamente, de forma que cuando funcionen lo hagan hacia delante. La toma de 1,5 voltios se obtiene de un cable que directamente se engancha al portapilas. Es el cable que sale por la derecha del portapilas y va al interruptor. Una tira de velcro abraza las patillas de la fotorresistencia, y es suficiente, junto con los cables para mantener la placa de circuito en su sitio, y el sensor perfectamente orientado. Una vez que todas las conexiones están hechas y repasadas un par de veces, es el momento de poner las pilas, darle al interruptor, poner el robot frente a un flexo o linterna (para empezar a unos 50 a 100 cm) y ver que pasa. Debes ajustar la resistencia variable, para regular la sensibilidad del circuito, utiliza para ello un destornillador suficientemente pequeño. Esta información se ha obtenido de la web: http://roble.pntic.mec.es/~jsaa0039/cucabot/ 14 PROYECTO “Robot de ida y vuelta” Una vez que hemos construido el trabajo propuesto por el profesor, se deberá de presentar el siguiente trabajo por escrito, en el que se describe las características de la construcción. Es individual y deberá de incluir los siguientes apartados. • • • • • • • Portada. Índice de contenidos. 1.- Propuesta de trabajo. 2.- Planos. 3.- Lista de materiales. 4.- Tareas realizadas. 5.- Evaluación del resultado. 1.- Propuesta de trabajo. Se describe el trabajo realizado. ¿Cómo es? ¿Qué elementos tiene? ¿Cómo funciona? ¿Cómo hay que conectarlo? Se puede realizar algún pequeño dibujo para que quede más clara la explicación. 2.- Planos. Se realizarán los dibujos de: • Plano del coche. Indicando distintas partes, luces, parachoques, interruptor, etc. • Circuito eléctrico, emplear las hojas que dio el profesor para la construcción. 3.- Lista de materiales. Se confecciona una lista con los materiales empleados ordenándolos en dos partes: Componentes del circuito eléctrico y componentes del vehículo. 4.-Tareas realizadas. Se confeccionará una tabla con los siguientes apartados. TAREA HERRAMIENTAS Corte de las piezas Lápiz, caladora y limas. para el vehículo. MATERIALES OBSERVACIONES DURACIÓN Panel de fibra. Se han ido cortando 2 hrs. sobre la marcha. 5.- Evaluación del resultado. Se describe el resultado del trabajo. Opinión sobre cómo ha quedado, su funcionamiento, su utilidad, sobre como ha trabajado el grupo, etc. Esta información se ha obtenido de la web: http://roble.pntic.mec.es/~jsaa0039/cucabot/ 15