Murófilo Robot electromecánico para principiantes. Sigue una pared
Anuncio

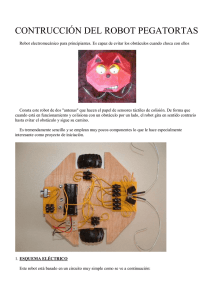
Murófilo Robot electromecánico para principiantes. Sigue una pared cuando se le coloca en su proximidad. Este robot, tal vez sea de los más sencillos de todos los que se presentan. Es capaz de seguir una pared palpándola, como si fuera un ciego que va con su bastón. 1. Esquema eléctrico El esquema eléctrico muestra la conexión entre todos los elementos eléctricos. 1. Funcionamiento El funcionamiento está basado en la puesta en marcha alternativa de los motores, como consecuencia de colisiones consecutivas de la antena con la pared. En un primer momento, cuando se cierra el interruptor, con el robot próximo a la pared que está a la izquierda, se pone en marcha el motor derecho solamente, lo que le hace describir un arco cuyo centro es el punto de apoyo de la rueda izquierda. Esto hace que la antena choque con la pared y se accione el final de carrera. Con el final de carrera accionado,se para el motor derecho y empieza a avanzar el izquierdo, con lo que el nuevo eje de giro está en el punto de apoyo de la rueda derecha. El robot avanza un poco separándose de la pared. En el momento en el que se separa lo suficiente como para el final de carrera regrese a su posición de reposo, se inicia el ciclo de nuevo. De esta manera el robot avanza dando "pasos" al accionar los dos motores alternativamente, y sin separarse de la pared. 1. Componentes Además de los motores que se encuentran en la plataforma, sólo se emplean los siguiente elementos: Un final de carrera, con accionamiento por palanca, de tamaño pequeño. Un portapilas para dos pilas de tamaño AA, de 1,5 voltios. Un pequeño interruptor para abrir y cerrar el circuito. Además, se utilizará cable de telefonía o similar para realizar las conexiones, que irán soldadas, alambre galvanizado para fabricar las antenas y un par de cm de macarrón termorretráctil. También unos trocitos de lámina plástica con belcro adherido en una cara, para montar en ellos el interruptor y el final de carrera, con un pequeño tope que puede cortarse por ejemplo de un rotulador, como se verá más adelante. 1. Montaje 1.1. Los preparativos Para el montaje es necesario preparar una antena sobre su final de carrera como viene descrito en la página de Pegatortas . El interruptor y la antena-final de carrera, se montan sobre sus láminas de plástico (p.e. con cola térmica) a las que se le ha puesto el belcro auto-adhesivo. Es conveniente colocar un pequeño tope en la lámina donde va montado el final de carrera, para que se eviten movimientos bruscos en la palanquita, al moverse el robot. 1.2. Las conexiones Se coloca el portapilas y las láminas del interruptor y antena sobre la base como se ve en la figura y se realizan las conexiones de acuerdo con el esquema eléctrico. Vista general del cableado Vista anterior Vista posterior 1.3. La forma de la antena Dobla la antena aproximadamente formando un ángulo recto, con longitudes en los dos tramos de unos 11 cm. Una forma redondeada en el extremo de la antena ayuda a evitar enganchones.