motores de corriente continua
Anuncio

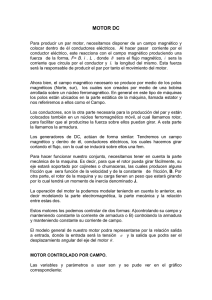
INSTITUTO NACIONAL TECNOLOGICO DIRECCION GENERAL DE FORMACION PROFESIONAL DEPARTAMENTO DE CURRICULUM MANUAL PARA EL PARTICIPANTE MOTORES DE CORRIENTE CONTINUA INSTRUCTOR: Roberto José Oviedo Díaz ESPECIALIDAD: Electricidad AGOSTO 2008 INSTITUTO NACIONAL TECNOLÓGICO (INATEC) DIRECCION GENERAL DE FORMACION PROFESIONAL DEPARTAMENTO DE CURRÍCULUM Unidad de Competencia: • Instalador de motores eléctricos Elementos de Competencias: • Motores de Corriente Continua. AGOSTO 2008 INDICE INTRODUCCION ............................................................................................................. 1 OBJETIVO GENERAL ..................................................................................................... 1 OBJETIVOS ESPECIFICOS ............................................................................................. 1 RECOMENDACIONES GENERALES ............................................................................. 2 UNIDAD I: MOTORES DE CORRIENTE CONTINUA ................................................... 3 1- INTRODUCCION A LOS MOTORES DE CORRIENTE CONTINUA ........................ 3 - 1.1-Introducción .......................................................................................................... 3 1.2 -Partes principales de un motor de cc........................................................................ 3 1.3-Núcleo de armadura y eje ......................................................................................... 4 1.4- Armadura devanada en tambor ................................................................................ 5 1.5-Conmutador ............................................................................................................. 6 1.6- Conjunto de escobillas ............................................................................................ 7 1.7- Principios básicos de funcionamiento ...................................................................... 9 1.8- Fuerza contraelectromotriz de un motor de C.C ..................................................... 10 1.9- Clasificación según el servicio .............................................................................. 11 1.10- Rendimiento ........................................................................................................ 11 2- CLASIFICACIÓN DE LOS MOTORES DE C.C ........................................................ 11 2.1-Motor serie............................................................................................................. 12 2.2- Motor de derivación o SHUNT ............................................................................. 14 2.3-Motores compound de C.C .................................................................................... 16 2.4 Motor Eléctrico sin escobilla ................................................................................. 19 3- Potencia nominal de los motores .............................................................................. 20 EJERCICIOS DE AUTO EVALUACIÓN ....................................................................... 23 GLOSARIO ..................................................................................................................... 24 BIBLIOGRAFIA ............................................................................................................. 25 INTRODUCCION El manual del participante “Motores de corriente continua” pretende que los(as) participantes adquieran las destrezas y habilidades necesarias para la conexión y puesta en funcionamiento de Motores de corriente continua. El manual contempla una unidad modular, donde sus contenidos se desarrollan en orden lógico desde los elementos más sencillos hasta llegar a los más complejos. El manual del participante esta basado en sus módulos y normas técnicos respectivas y corresponde a la unidad de competencia “Instalador de Motores Eléctricos” de la especialidad de técnico en electricidad. Se recomienda realizar las actividades y los ejercicios de auto evaluación para alcanzar el dominio de la competencia: Instalador de Motores Eléctricos, para lograr los objetivos planteados, es necesario que los(as) y las participantes tengan en cuenta las normas de seguridad, para prevenir accidentes eléctricos al instalar motores de corriente continúa. OBJETIVO GENERAL § Realizar eficientemente, montaje, conexión y puesta en funcionamiento de Motores de corriente continúa, tomando en cuenta normas de seguridad. OBJETIVOS ESPECIFICOS § Explicar correctamente el funcionamiento del motor de CC partiendo de los principios físicos. § Enumerar correctamente diferentes partes del motor de corriente continua de acuerdo a su clasificación. § Clasificar correctamente motores de corriente continua. § Realizar correctamente arranque del motor eléctrico de corriente continua. 1 RECOMENDACIONES GENERALES Para iniciar el estudio del manual, debe estar claro que siempre su dedicación y esfuerzo le permitirá adquirir la Unidad de competencia a la cual responde el Módulo Formativo de motor de corriente continua. • Al iniciar el estudio de los temas que contiene el manual debe estar claro que su dedicación y esfuerzo le permitirá adquirir la competencia a la cual responde el Módulo formativo. • Al comenzar un tema debe leer recomendaciones generales. detenidamente los objetivos y • Trate de comprender las ideas y analícelas detenidamente para comprender objetivamente los ejercicios de auto evaluación. • Consulte siempre a su docente, cuando necesite alguna aclaración. • Amplíe sus conocimientos con la bibliografía indicada u otros textos que estén a su alcance. • A medida que avance en el estudio de los temas, vaya recopilando sus inquietudes o dudas sobre éstos, para solicitar aclaración durante las sesiones de clase. • Resuelva responsablemente los ejercicios de auto evaluación. 2 UNIDAD I: MOTORES DE CORRIENTE CONTINUA 1- INTRODUCCION A LOS MOTORES DE CORRIENTE CONTINUA - 1.1-Introducción La máquina de corriente continua es una de las más versátiles en la industria. Su fácil control de posición, par y velocidad la han convertido en una de las mejores selecciones en aplicaciones de control y automatización de procesos. Pero con el advenimiento de la electrónica han caído en desuso pues los motores de corriente alterna del tipo asíncrono, pueden ser controlados de igual forma a precios más accesibles para el consumidor promedio de la industria. A pesar de esto el uso de motores de corriente continua (motores c.c.) sigue y se usan en aplicaciones de trenes o tranvías. El motor de corriente continua es una máquina que convierte la energía eléctrica en mecánica, principalmente mediante el movimiento rotativo. En la actualidad existen algunas nuevas aplicaciones con motores que no convierten el movimiento en rotación, si no que con algunas modificaciones, ejercen la tracción sobre un riel. Estos motores se conocen como motores lineales. La principal característica del motor de corriente continua es la posibilidad de regulación de su velocidad desde vacío a plena carga. Un motor de corriente continua está compuesto de un estator y un rotor. En muchos motores c.c., generalmente los más pequeños, el estator está compuesto de imanes para crear un campo magnético. En motores c.c. más grandes este campo magnético se logra con devanados de excitación de campo. El rotor es el dispositivo que gira en el centro del motor y está compuesto de arrollamientos de cable conductores de corriente continua. Esta corriente continua es suministrada al rotor por medio de las "escobillas" generalmente fabricadas de carbón. 1.2 -Partes principales de un motor de cc Existen diferentes tipos de motores, pero de entre todos tal vez sean los llamados “motores de corriente continua” los que permiten ver de un modo más simple cómo obtener movimiento gracias al campo magnético creado por una corriente. El elemento situado en el centro es la parte del motor que genera el movimiento. Se la llama armadura o rotor, y consiste en un electroimán que puede girar libremente entorno a un eje. Dicho rotor está rodeado por un imán permanente, cuyo campo magnético permanece fijo. (Figura 1 ) 3 Figura 1 Partes principales de un motor El elemento situado en el centro es la parte del motor que genera el movimiento. Se la llama armadura o rotor, y consiste en un electroimán que puede girar libremente entorno a un eje. Dicho rotor está rodeado por un imán permanente, cuyo campo magnético permanece fijo. 1.3-Núcleo de armadura y eje El termino armadura o rotor (Figura 2 ) se aplica a la parte giratoria del motor. Cuando se observa un motor en marcha, generalmente se ve el eje que gira. el eje es una extensión externa de la armadura que pasa a través de la cubierta y coraza del motor, se encuentra en el lado opuesto al extremo del conmutador del motor. Figura 2 Núcleo y eje Un núcleo de armadura típico es un cilindro sólido que tiene ranuras y esta hecho de metal. En realidad, el núcleo esta formado por delgadas muescas en la orilla; están revestidas con un barniz aislante y comprimido para formar el núcleo. En el proceso de formación, las muescas se alinean de manera que el núcleo acabado tiene una serie de ranuras longitudinales en todo su perímetro. Las laminaciones se usan en el núcleo con objeto de reducir pérdidas por corrientes parásitas. 4 Las corrientes parásitas son las que se inducen en una material conductor cuando este corta líneas de flujo magnéticas. Las laminaciones reducen el área donde pueden existir corrientes parásitas y, en consecuencia, aumenta la resistencia relativa del material; así pues, se reducen las pérdidas de potencia debidas a corrientes parásitas. El uso de acero dulce como material del núcleo reduce las perdidas por histéresis que, las cuales ocurren cuando las inversiones de magnetización del material del núcleo están atrasadas con respecto a las inversiones de la corriente. (Figura 3) Las ranuras del núcleo ya formado sirven para alojar las espiras de alambre de cobre o devanados de la armadura. El núcleo de armadura esta montado sobre el eje del motor, el cual generalmente es una barra de acero duro con superficie interna de contacto muy bien pulida. El método de montaje del núcleo sobre el eje varía considerablemente, según los distintos motores. Figura 3 Proceso de armado de un motor CC 1.4- Armadura devanada en tambor Las espiras o bobinas que constituyen la armadura devanada en tambor se hallan alrededor del núcleo de la armadura, alojando los lados de las bobinas en las ranuras del núcleo. Las ranuras suelen estar aisladas con papel de pescado para proteger los devanados. En muchas armaduras, las bobinas son formadas previamente para darles su forma definitiva y luego se colocan en las ranuras del núcleo. A esto se le llama devanado de formas y se lleva a cabo ya sea conformando las bobinas sobre un molde de madera o doblándolas en una prensa antes de colocarlas sobre el tambor. Cada devanado siempre es igual que otro en la armadura y, al final, la armadura devanada siempre debe ser perfectamente simétrica. Después de que las bobinas 5 de armadura se han colocado sobre el núcleo, en la ranura del núcleo se ponen cuñas de material aislante para fijar las bobinas. Después de esto, se usan bandas adhesivas de acero para asegurase las bobinas de manera que no sean expulsadas por la fuerza centrifuga producidas durante la rotación de la armadura. Básicamente, hay dos formas en que se dispone el devanado de los tambores en uso: Devanados imbricados y devanados ondulados. El imbricado se usa para motores de baja tensión y alta corriente. El ondulado se usa en motores que requieren alta tensión y baja corriente. (Figura 4 ) Figura 4 Devanado en tambor 1.5-Conmutador El conmutador consta de segmentos conductores particulares(Figura 5 ) hechos de cobre y aislados entre sí con láminas delgadas de mica. Cada segmento, con sus separadores de mica, se monta en un molde cilíndrico y se sujeta a las demás por medio de una brida de sujeción. Los segmentos se aíslan de la brida de sujeción mediante anillos de mica. 6 Figura 5 Conmutador Las puntas de las bobinas de armadura se conectan a las partes sobresalientes de los segmentos de conmutador, las cuales se conocen como colas. Algunos segmentos del conmutador se fabrican sin colas y, en su lugar, tienen ranuras en los extremos, a los cuales se conectan las puntas de la bobina de armadura. Después de armado el conmutador, se tornea la superficie en forma perfectamente cilíndrica y se pule hasta darle un acabado muy terso, lo cual asegura que la fricción entre la superficie de conmutación y las escobillas sea al mínimo finalmente, esto es de gran importancia, el aislamiento de mica entre los segmentos se recorta de modo que quede ligeramente abajo de la superficie de los segmentos del conmutador, a fin de que no interfiera el paso de las escobillas. Generalmente, después de que el motor a estado en servicio durante algún tiempo, la superficie de cobre del conmutador se desgasta. Para que el motor funcione satisfactoriamente, siempre que el cobre se desgaste hasta el nivel de la mica, es necesario recortarlo nuevamente, al mismo tiempo es necesario tornear el conmutador, para que mantenga su forma cilíndrica. 1.6- Conjunto de escobillas El conjunto de escobillas está formado por las escobillas o carbones, (Figura 6a) sus sujetadores y resortes de escobillas. Las escobillas propiamente dichas están hechas de carbón suave que contiene una gran proporción de grafito (Figura 6b). Este material tiene dos objetivos: • • Es lo suficientemente suave como para que el conmutador sólo se desgaste al mínimo. Al mismo tiempo es lo suficientemente duro para que la escobilla no se desgaste con demasiada rapidez. Nunca debe aplicarse lubricación entre las escobillas y el conmutador, pues la que pudiera necesitarse la proporciona el grafito de las escobillas. 7 Figura 6 a Escobilla y carbones Generalmente las escobillas están montadas cada una pieza llamada porta escobilla. Estas piezas mantienen una posición fija y están montadas en la cubierta del motor, aunque aisladas de ella. La escobilla se coloca holgadamente en el porta escobilla y un resorte la empuja para que no pierda contacto con el conmutador. El ajuste flojo y la presión del resorte hacen posible que las escobillas tengan cierta libertad de movimiento en sus sujetadores, de manera que puedan ajustarse a las pequeñas irregularidades de la superficie del conmutador. En muchos motores la presión del resorte se puede ajustar según la especificación del fabricante. Si la presión es excesiva, las escobillas se desgastarán demasiado rápidamente. Si es insuficiente, se hará mal contacto, lo cual también producirá chisporroteo y operación irregular del motor. Figura 6b Tipos de carbones 8 En la mayor parte de los motores, la conexión eléctrica entre las escobillas y la fuente externa de potencia es como sigue: las escobillas propiamente dichas están conectadas eléctricamente a su porta escobillas respectivas (Figura 7 ) por medio de alambres de cobre prensado, llamados “colas de puerco”. A su vez, los sujetadores están conectados a pernos que van en el exterior de la cubierta del motor. Tanto los porta escobillas como los pernos están aislados de la cubierta misma. Los pernos constituyen los puntos de unión a los cuales se pueden conectar las terminales de potencia al motor. Aunque las escobillas están diseñadas para durar largo tiempo, siempre se hacen de manera que se desgasten más rápidamente que el conmutador, debido a que es más barato y fácil sustituir las escobillas que reparar una armadura. Generalmente se hacen escobillas de bastante longitud, de manera que puedan mantenerse en servicio durante un periodo relativamente largo antes de que queden desgastadas hasta el punto en que sea necesario sustituirlas. El resorte mantiene a la escobilla firmemente apoyada contra el conmutador durante toda su vida útil. Figura 7 Portaescobillas 1.7- Principios básicos de funcionamiento Cuando un conductor por el que fluye una corriente continua es colocado bajo la influencia de un campo magnético, se induce sobre él (el conductor) una fuerza que es perpendicular tanto a las líneas de campo magnético como al sentido del flujo de la corriente. (Figura 8 ). Figura 8 Funcionamiento Para tener una idea más clara se tiene que colocar este conductor con respecto al eje de rotación del rotor para que exista movimiento. En este caso la corriente por el conductor fluye introduciéndose en el gráfico. (Figura 9 ) 9 Figura 9 Grafico de funcionamiento Pero en el rotor de un motor de CC, no hay solamente un conductor, sino muchos. Si se incluye otro conductor exactamente al otro lado del rotor y con la corriente fluyendo en el mismo sentido, el motor no girará pues las dos fuerzas ejercidas para el giro del motor se cancelan. Es por esta razón que las corrientes que circulan por conductores opuestos deben tener sentidos de circulación opuestos. Si se hace lo anterior el motor girará por la suma de la fuerza ejercida en los dos conductores. Para controlar el sentido del flujo de la corriente en los conductores se usa un conmutador que realiza la inversión del sentido de la corriente cuando el conductor pasa por la línea muerta del campo magnético. La fuerza con la que el motor gira (el par motor) es proporcional a la corriente que hay por los conductores. A mayor tensión, mayor corriente y mayor par motor. 1.8- Fuerza contraelectromotriz de un motor de C.C Cuando un motor de corriente continua es alimentado, el voltaje de alimentación se divide entre la caída que hay por la resistencia de los arrollados del motor y una tensión denominada fuerza electromotriz (FEM). (Figura 10) Figura 10 Fuerza Electromotriz Donde: Vm = tensión de entrada al motor (voltios) Ra = resistencia del devanado de excitación (ohmios) Ia = corriente de excitación (amperios / amperes) Vb = FEM debido al giro del motor (voltios) Aplicando la ley de tensiones de Kirchoff: 10 Vm = Vb + (Ia x Ra) o Vb = Vm - (Ia x Ra) Nota: Observar de la ultima ecuación que cuando sube el valor de Ia, disminuye el Valor de Vb. La FEM es proporcional a la velocidad del motor y a la intensidad del campo magnético. Si el motor tiene rotor con imán permanente esta constante es: K = Vb / Nd. Donde: - K = constante de FEM del motor y se expresa en Voltios / rpm. - Nd = Velocidad de giro del motor en rpm. 1.9- Clasificación según el servicio Es importante conocer la clase de servicio a la que estará sometida una máquina: • Servicio continuo: Corresponde a una carga constante durante un tiempo suficientemente largo como para que la temperatura llegue a estabilizarse. • Servicio continuo variable: Se da en máquinas que trabajan constantemente pero en las que el régimen de carga varía de un momento a otro. • Servicio intermitente: Los tiempos de trabajo están separados por tiempos de reposo. Factor de marcha es la relación entre el tiempo de trabajo y la duración total del ciclo de trabajo. • Servicio uní horario: La máquina está una hora en marcha a un régimen constante superior al continuo, pero no llega a alcanzar la temperatura que ponga en peligro los materiales aislantes. La temperatura no llega a estabilizarse. 1.10- Rendimiento De manera general, se define como la relación entre la potencia útil y la potencia absorbida expresada en %. 2- CLASIFICACIÓN DE LOS MOTORES DE C.C Los motores de corriente continua se clasifican según la forma como estén conectados, en: • • • • Motor serie Compound Shunt Sin escobillas 11 2.1-Motor serie Es un tipo de motor eléctrico de corriente continua en el cual el devanado de campo (campo magnético principal) se conecta en serie con la armadura. (Figura 11a ) Lo cual significa que fluye una corriente común a través de ambos devanados. Lo que suceda a la corriente de armadura a causa del impulso de una carga se “siente” automáticamente en el devanado de campo. Este devanado está hecho por un alambre grueso, ya que tendrá que soportar la corriente total de la armadura. Debido a esto se produce un flujo magnético proporcional a la corriente de armadura (carga del motor). Cuando el motor tiene mucha carga, el campo serie produce un campo magnético mucho mayor, lo cual permite un esfuerzo de torsión ó par mucho mayor, y este tipo de motores desarrolla un torque muy elevado en el arranque. Sin embargo, la velocidad varia extensamente dependiendo el tipo de carga que se tenga, por ejemplo sin carga (no-load) (Figura 11b) o con carga completa (full-load). (Figura 11c) Estos motores desarrollan un par de arranque muy elevado y pueden acelerar cargas pesadas rápidamente. Manejan cargas pesadas muy por encima de su capacidad completa. Por lo tanto, el motor serie no funciona a velocidad constante. Ya que si el par es elevado, la velocidad es baja; y cuando el par es bajo la velocidad es alta. Por tanto podemos decir que el par y la velocidad son inversamente proporcionales. Figura 11 a ,b Funcionamiento motor serie sin carga 12 Figura 11 c Funcionamiento motor serie con carga Capacidad de arranque El motor de serie puede dar un par de arranque muy elevado y, por lo tanto, satisfacer la necesidad de tener un par grande para sobrecargas intensas súbitas. Esto se debe a que el par del motor de serie varía casi en la misma forma que el cuadrado de la corriente que pasa por él. Si la corriente de la armadura se triplicara súbitamente por una sobrecarga, la corriente que fluya en el campo y, en consecuencia, la intensidad de flujo automáticamente también se triplicaría. Como el par es el producto de la corriente de armadura por la intensidad del flujo, el par resultante seria nueve veces mayor que el original. Figura 12 Capacidad de arranque Los motores serie son útiles cuando se aplica al motor cargas muy variables. En la industria, los motores de serie se usan para efectuar trabajo rudo en grúas, trenes subterráneos, locomotoras etc. (Figura 12) Debido a esta característica, los motores serie se usan siempre que el necesita un par de arranque alto contra cargas intensa que deben permanecer acopladas a el durante una operación completa. Los motores de serie son especialmente efectivos cuando es probable que en la operación se produzca una sobrecarga súbita muy intensa. Sin embargo, no conviene usar el motor de serie para aplicaciones en que se requiere una velocidad relativamente constante, tanto sin carga como a plena carga. 13 2.2- Motor de derivación o SHUNT El motor de derivación debe su nombre al hecho de que su devanado. (Figura 13) De campo esta conectado a la línea de alimentación de potencia en paralelo con el devanado de armadura, lo cual significa que existe una trayectoria independiente para el flujo de corriente a través de cada devanado. En un motor de derivación la corriente de campo puede mantenerse constante y el circuito de armadura sólo sirve para controlar al motor. Así, una de las principales características de este tipo de motor es que puede mantener una velocidad constante al alimentar una carga variable y la carga puede quitarse totalmente sin peligro para el motor. Figura 13 Motor de derivación El recorrido del devanado indicará que el circuito de campo y el circuito de armadura son independientes. Por lo tanto, éste es un motor de derivación. Se notara que los polos intermedios están en serie con el circuito de armadura para hacer que respondan a cambios de corrientes de armadura. Al aumenta la carga de un motor de derivación. El efecto inmediato es reducir la velocidad de armadura. La reducción de la velocidad de la armadura reduce la fcem, produciendo un aumento en la cantidad de corriente de armadura que fluye, lo cual tiene el efecto de aumentar el para acelerar nuevamente la armadura. El fenómeno se presenta en forma inversa cuando se quita carga de un motor derivado. Control de velocidad El motor de derivación puede funcionar a varias velocidades mediante un control reostático ya sea en serie con el devanado de campo, el devanado de armadura o ambos. El uso de un reóstato en serie (Figura 14) con el devanado de campo es el método más común de variar la velocidad de un motor derivado. Esto es preferible a usar un reóstato de armadura (Figura 15 ) debido a que la corriente de campo es 14 menor que la corriente de armadura y, en consecuencia, la pérdida de potencia en el reóstato es mucho menor cuando éste está en el circuito de campo. Como resultado, se dispone de mayor cantidad de corriente para el funcionamiento real del motor. Al agregar una resistencia en serie con el campo, fluye menos corriente de campo, la intensidad de campo disminuye y el motor se acelera. Esto sucede debido a que, cuando la armadura giratoria corta menos líneas de flujo, la fcem tiende a disminuir. Esto hace posible que fluya más corriente en la armadura, lo que ocasiona un aumento de par fuera de proporción con la cantidad requerida. Como resultado, el motor se acelera rápidamente y la fcem aumenta a un valor en el cual la corriente se reduce hasta que produce la cantidad correcta de par. Si se agrega menos resistencia en serie con el campo, la intensidad del campo aumenta y la marcha del motor se vuelve más lenta. Con cualquier parte del reóstato en el circuito, una porción del voltaje de alimentación se reduce en él y fluye menos corriente a través del elemento del motor que este en serie con él. Figura 14 Reóstato en serie de campo 15 Figura 15 Reóstato de armadura Sensibilidad a fluctuaciones de corriente Una de las características notables del motor de derivación es que acelera cuando disminuye la corriente en el devanado de campo. Esta característica se aprovecha para controlar la velocidad del motor de derivación con un reóstato de campo en serie. El aumento de velocidad y la disminución en la intensidad del campo se deben a una reducción de fcem y un aumento correspondiente en la corriente de armadura. Cuando sucede esto, el aumento en corriente de armadura produce a su vez un aumento en el par fuera de toda proporción con la reducción de intensidad del campo. Si la intensidad de campo repentinamente se vuelve muy débil, como cuando se abre un devanado de campo y solo el magnetismo residual mantiene el campo, el motor de derivación empezara a funcionar muy rápidamente, y se dice que se desboca. El funcionamiento desbocado puede destruir completamente al motor, que en la mayor parte de los casos, no se ha construido para resistir el esfuerzo físico de trabajar a esta velocidad. De la misma manera, cuando el circuito de campo de un motor de derivación esta completamente abierto, el motor probablemente se quemará debido a la elevada corriente de armadura que toma. 2.3-Motores compound de C.C El motor Serie tiene características especiales que no tiene el de Derivación y viceversa. Por ejemplo: • La característica de velocidad constante del motor de derivación no se encuentra en el motor serie. • La excelente característica de alto par en el motor serie no se encuentra en el motor de derivación. Es conveniente combinar las características de cada uno de ellos, en un solo motor. 16 Estas características (Figura 16) se pueden combinar dando al motor dos devanados de campo: Uno de ellos en serie con la armadura y el otro en paralelo con ella. A este tipo de motor de corriente continua se le denomina motor compound. Figura 16 Características del motor compound Los motores compuestos tienen un campo serie sobre el tope del bobinado del campo shunt. Este campo serie, el cual consiste de pocas vueltas de un alambre grueso, es conectado en serie con la armadura y lleva la corriente de armadura. 17 El flujo del campo serie varia directamente a medida que la corriente de armadura varia, y es directamente proporcional a la carga. El campo serie se conecta de manera tal que su flujo se añade al flujo del campo principal shunt. Los motores compound se conectan normalmente de esta manera y se denominan como compound acumulativo. Esto provee una característica de velocidad la cual no es tan “dura” o plana como la del motor shunt, no tan “suave” como un motor serie. Un motor compound tiene un limitado rango de debilitamiento de campo, la debilitación del campo puede resultar en exceder la máxima velocidad segura del motor sin carga. Los motores DC compound son algunas veces utilizados donde se requiera una respuesta estable de torque constante a través de un amplio rango de velocidad. En consecuencia con la combinación se han agregado algunas de las cualidades del motor de serie al de derivación. Un motor serie al cual se le ha agregado un campo en derivación. El motor de serie común se “desboca” cuando no tiene carga, debido, en parte, a que el flujo de campo disminuye constantemente. Al agregar un campo en derivación de flujo constante, la velocidad del motor tiende a limitarse a un valor razonable, como en el caso del motor común de derivación. Si se disponen los devanados de campo del motor compound de manera que la intensidad de uno sea mayor que la del otro, se logrará que el motor compound se a semeje más al motor de serie o al de derivación. En este control de la intensidad relativa de ambos campos se basa la clasificación de los motores compound acumulativos y compound diferencial. La mayor parte de estos motores son del tipo compound acumulativo. Si se conecta el devanado de campo en derivación con la armadura y con el devanado de campo en serie, se obtiene un motor compound acumulativo de derivación larga. (Figura 17) Si el devanado de campo se conecta sólo con la armadura, entonces se tiene un motor compound acumulativo de derivación corta. (Figura 18) 18 Figura 17 Con derivación larga Figura 18 Con derivación corta La mayor parte de los motores compound prácticos que se usan actualmente son de los tipos compound acumulativo en derivación larga y corta. Rara vez se emplean motores de combinación diferencial. 2.4 Motor Eléctrico sin escobilla Un motor sin escobillas es un motor que no emplea escobillas para realizar el cambio de polaridad en el rotor. Los motores eléctricos solían tener un colector de delgas o un par de anillos rozantes. Estos sistemas, que producen rozamiento, disminuyen el rendimiento, desprenden calor y ruido, requieren mucho mantenimiento y pueden producir partículas de carbón que manchan el motor de un polvo que además puede ser conductor. Los primeros motores sin escobillas fueron los motores de corriente alterna asíncronos. Hoy en día gracias a la electrónica, se mostraron muy ventajosos, ya que son más baratos de fabricar, pesan menos y requieren menos mantenimiento, pero su control era mucho más complejo. Esta complejidad prácticamente se ha eliminado con los controles electrónicos. 19 El inversor debe convertir la corriente alterna en corriente continua y otra vez en alterna de otra frecuencia. Otras veces se puede alimentar directamente con continua eliminado el primer paso. Por este motivo estos motores de corriente alterna se pueden usar en aplicaciones de corriente continua con un rendimiento mucho mayor que un motor de corriente continua con escobillas. Algunas aplicaciones serian los coches y aviones con radio control que funcionan con pilas. Otros motores sin escobillas que solo funcionan con corriente continua son los que se usan en pequeños aparatos eléctricos de baja potencia como Lectores de CDROM, ventiladores de ordenador, Cassetes, etc. Su mecanismo se basa en sustituir la conmutación (Cambio de polaridad) mecánica por una electrónica sin contacto. En este caso la espira solo es impulsada cuando el polo es el correcto y cuando no lo es, el sistema electrónico corta el suministro de corriente. Para detectar la posición de la espira del rotor se utiliza la detección de un campo magnético. Este sistema electrónico además puede informar de la velocidad de giro o si está parado, e incluso cortar la corriente si se detiene para que no se queme. Tienen la desventaja de que no giran al revés al cambiarles la polaridad (+ y -). Para hacer el cambio se deberían cruzar dos conductores del sistema electrónico. Un sistema algo parecido para evitar este rozamiento en los anillos se usa en los alternadores. En este caso no se evita el uso de anillos rozantes sino que se evita usar uno más robusto y que frenaría mucho el motor. Actualmente los alternadores tienen el campo magnético inductor en el rotor, que induce el campo magnético al estator, que a la vez es inducido. Como el campo magnético del inductor necesita mucha menos corriente que la que se va generar en el inducido, se necesitan unos anillos con un rozamiento menor. Esta configuración la usan desde pequeños alternadores de coche hasta los generadores de centrales con potencias del orden de los megavatios. 3- Potencia nominal de los motores Los motores se clasifican según la carga que pueden impulsar y a lo cual se le llama salida de potencia. También se clasifican por la potencia eléctrica que toman de la línea, llamada la entrada de potencia, y por la calidad con que transforman energía eléctrica en energía mecánica, a lo que se le llama eficiencia. La salida de la potencia es una medida de la energía mecánica que el motor transmite a plena carga y se indica en caballos de fuerza. El caballaje es una forma de indicar la cantidad de trabajo que puede efectuar un motor en determinado periodo de tiempo, en comparación con un caballo. 20 Un caballo de fuerza equivale a 33,000 libras –pies de trabajo por minuto. La cantidad de libras-pie de trabajo que produce un motor es igual a su par multiplicado por la velocidad a que funciona. Puede calcularse el caballaje de cualquier motor si se conocen su par y su velocidad. El par se puede medir directamente por medio de un dispositivo que se llama freno de prony (Figura 19) y la velocidad se puede determinar mediante un tacómetro, o contador de revoluciones por minuto, y un reloj Generalmente, en la placa de datos del motor se indica el caballaje nominal del mismo. Figura 19 Prueba de freno prony La unidad del freno de prony se fija a una polea especial sobre el eje del motor. El apriete de los pernos roscados hace que el freno gire junto con el motor. Sin embargo, el brazo del freno está limitado por la escala de un resorte. El par es el producto de lo que se lee en la escala (fuerza en Kilogramos) por la longitud del brazo de par en metros La potencia eléctrica que toma un motor de c-c de la línea de alimentación es simplemente el producto de la corriente por el voltaje, y se expresa en watts. Potencia = Voltaje x Corriente PWatts = EVolts x IAmps Desgraciadamente, no toda la potencia que llega a un motor es recuperada como potencia mecánica útil para impulsar la carga. Parte de la potencia se consume como calor en el devanado de campo, otra parte se consume en forma de calor en 21 la armadura, y otra parte se utiliza para vencer los efectos de carga mecánica debidos a la fricción, la resistencia del aire, etc. En todos estos casos se consume una cantidad de potencia que no se transfiere a la carga como energía mecánica. Esta potencia pedida recibe el nombre de pérdidas. (Figura 20) La salida de potencia de un motor siempre es igual a su entrada de potencia menos todas las perdidas de potencia. Figura 20 Perdidas de calor en un motor La eficiencia de un motor es una medida de la transformación de la entrada de potencia en salida de potencia. Si las pérdidas son bajas, se dice que la eficiencia es alta. La eficiencia se determina dividiendo la entrada de potencia entre la salida de potencia y multiplicando por 100, para obtenerla en porcentaje, la entrada, expresada en watts, se puede dividir entre la salida expresada en caballos de fuerza(hp), debido a que existe una relación definida entra ambas, que es la siguiente: 1hp = 746 Watts La clasificación de la información en la placa de datos del motor generalmente suministra la información suficiente para obtener o calcular todo lo que se necesita conocer del motor. Con frecuencia, los motores se clasifican según la entrada en caballos de fuerza de acuerdo con esta clasificación un motor de ¼ hp, por ejemplo, tendrá una salida algo menor de ¼ hp debido a las perdidas. 22 EJERCICIOS DE AUTO EVALUACIÓN Después del estudio de la unidad I, te sugiero que realices los siguientes ejercicios de autoevaluación, lo que permitirá fortalecer tus conocimientos. I. Responda la siguiente pregunta. 1. ¿Mencione las partes principales del motor? 2. ¿Que es el conmutador? 3. ¿Qué son los carbones? 4. ¿Mencione el principio básico de funcionamiento del motor de c.c.? 5. ¿Cómo se clasifican los motores de c.c? 6. ¿Mencione las características del motor serie? 7. ¿Mencione las características del motor Shunt? 8. ¿Mencione las características del motor Compound? 9. ¿Mencione las características del motor sin escobillas? 10. ¿Qué significa potencia nominal en los motores c.c.? 11. ¿Qué significa rendimiento? II. Realice una práctica de puesta en funcionamiento de un motor de c.c. 23 GLOSARIO Devanado: es un arrollado compuesto de cables conductores que tiene un propósito específico dentro de un motor FEM: fuerza electromotriz RPM: revoluciones por minuto Corriente continua (c.c.): Es el flujo continuo de electricidad a través de un conductor entre dos puntos de distinto potencial. Par de giro: Es la fuerza con que gira un eje. Se mide en kilogramo*metro (MKS) o newton*metro (S.I.). Par motor: Es la fuerza con que gira un motor. El giro de un motor tiene dos características: el par motor y la velocidad de giro. Por combinación de estas dos se obtiene la potencia. Eficiencia: La eficiencia o rendimiento de un motor eléctrico es una medida de su habilidad para convertir la potencia eléctrica que toma de la línea en potencia mecánica útil. Se expresa usualmente en por ciento de la relación de la potencia mecánica entre la potencia eléctrica, esto es: Placa de fábrica Se dispone de placas de fábrica de acero inoxidable adicionales. 24 BIBLIOGRAFIA • Motores de CA “Soluciones en las que sí se puede confiar” Manual de Instrucciones B-3605-9S, Abril de 1999 Rockwell Automation Systems Reliance Electric. • ABC Maquinas Eléctricas. Enríquez Harper • Maquinas Eléctricas. 25