T: Archivo pdf
Anuncio

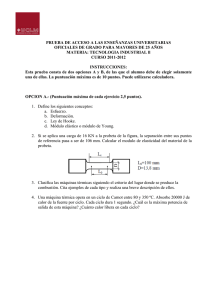
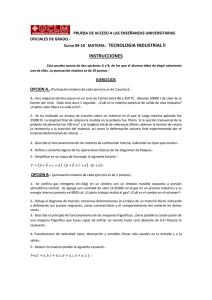
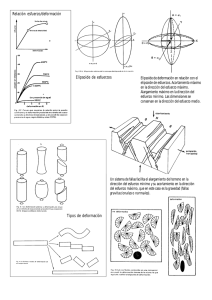
Tema 4. ESTÁTICA Física, J.W. Kane, M. M. Sternheim, Reverté, 1989 Tema 4 Estática Estática Propiedades elásticas TS 4.8 Las mandíbulas de los animales Caps. 4 y 8 Cap. 4, pp 70-88 Cap. 8, pp 183-195 Cap.4, pp 89-90 Problema clásico de la masa colgante: http://www.youtube.com/watch?v=dxM9lsbUbpw 1 CENTRO DE MASAS Sistema de partículas m1 Z r1 Y rn X n rCM m2 r2 rCM mi ri m r m2 r2 ... mn rn 1 1 n 1 1 M m1 m2 ... mn m n m i 1 ri M es la masa total i 1 El sistema de partículas responde ante la acción de fuerzas exteriores del mismo modo que respondería si la resultante de todas ellas se aplicase en el centro de masas. La ecuación vectorial anterior contiene tres ecuaciones escalares, una por cada coordenada n mi xi m1 x1 m2 x2 ... mn xn 1 n 1 mi xi xCM n M m1 m2 ... mn 1 m mn i 1 Sólido rígido Sistema de partículas en el cual las distancias relativas entre ellas son invariables. Es decir, se trata de un sólido indeformable. Z Posición del CM en un sólido rígido dm r X Y rCM r dm dm 1 M r dm Nosotros no acometeremos cálculos complicados, nos basaremos sobre todo en propiedades de simetría. 2 CENTRO DE MASAS Ejemplo. El polo inferior de la esfera mostrada en el esquema está en contacto con el centro de la base superior del cilindro. Determinar la posición del CM del conjunto, sabiendo que el cilindro y la esfera tienen el mismo diámetro, que la altura del cilindro es dos veces su diámetro y que la densidad del material que forma la esfera es la mitad de la del material del cilindro. Z Resolución 1. Elegimos arbitrariamente un origen de coordenadas en el punto de contacto de ambos sólidos. Por razón de la simetría del problema, esta elección implica que el CM va a estar sobre el eje Z. 2. Tanto la esfera E como el cilindro C son figuras con simetría, y sus centros de masas respectivos están situados en los respectivos centros de las figuras, cuyas coordenadas son E 0,0, R C 0,0,2 R R es el radio de la esfera 3. Calculamos las masas. Sea la densidad de la esfera. 4 M E R3 3 M C R 2 4 R 2 8 R 3 4. Ahora representamos la esfera y el cilindro por dos masas puntuales ocupando la posición de su CM respectivo. E 0,0, R Z zCM Y E 0,0, R ME X Y R4 / 3 R 3 2 R 8 R 3 4 / 3 R 3 8 R 3 zCM R 4 / 3 16 11 R 4 / 3 8 7 C 0,0,2 R X C 0,0,2 R MC Discusión: ¿cuál sería el resultado de haber elegido otro origen de coordenadas? 3 MOMENTO DE UNA FUERZA Momento de una fuerza con respecto a un punto i O r F x Fx j y Fy k z Fz Dirección: perpendicular al plano determinado por r y F Sentido: el indicado por la regla de la mano derecha Módulo: Punto de aplicación: el punto O O F Fx i Fy j Fz k Brazo de la fuerza O r xi y j zk O r F O O r F sin O F El momento respecto a un punto está asociado con una rotación en el sentido indicado por la regla de la mano derecha. Puesto que un sólido rígido puede girar además de trasladarse, para su equilibrio de rotación es preciso que sobre él no actúe ningún momento neto. Terminología alternativa: Momento de una fuerza Torque 4 MOMENTO DE UNA FUERZA Momento de una fuerza con respecto a un punto Vista desde arriba (vector O normal y saliente) Ejemplo F O O r Nótese que O r F sin Brazo de la fuerza d F Línea de acción de la fuerza pues d r sin El momento respecto a O es igual al producto del brazo por la componente de la fuerza perpendicular a dicho brazo F sin . Ejemplo 2. ¿En qué caso se ejerce mayor fuerza? ¿En qué caso se ejerce mayor momento? (a) (b) (c) 5 CONDICIONES DE EQUILIBRIO ESTÁTICO DE UN CUERPO RÍGIDO Equilibrio de traslación: Suma de fuerzas externas igual a cero F 0 Equilibrio de rotación: Suma de momentos de las fuerzas externas igual a cero 0 Ejemplo. Barra homogénea horizontal sostenida por un pivote y un cable. Longitud de la barra L = 75 cm. Peso W = 650 N. Calcular la tensión y la reacción en el pivote A. T 12º A 15 cm Tomamos momentos respecto al punto A W A W T Diagrama de sólido libre de la barra L T L 0.15 sin 12º 0 2 650 0.75 1954 N 2 0.60 sin 12º Y N X M A FX M T cos12 0 T 12º 15 cm La resultante de estas fuerzas es M 2 N 2 1927 N W M T cos 12 1911 N N M F Y N W T sin 12 0 N W T sin 12 244 N 6 PALANCAS Las palancas son máquinas simples que constan de un fulcro o punto de apoyo f, una fuerza aplicada F y una fuerza resistente o resistencia R. El propósito de las palancas es equilibrar la resistencia R con la fuerza F mediante la elección apropiada del fulcro, aprovechando el hecho de que los momentos respecto al fulcro de ambas fuerzas sean iguales. Se denomina ventaja mecánica (VM) de la palanca al cociente R/F. Clases de palancas 1er género F xF xR xF f 3er género 2º género xR R F xF R xR R x VM F F xR VM puede ser mayor o menor que la unidad F xF R f xR R f F xF R xR VM F R xF F xR VM siempre es mayor que la unidad F xF R xR VM R xF F xR VM siempre es menor que la unidad 7 PALANCAS EN EL CUERPO HUMANO f F R F F R R f 2º género F 1er género f 3er género F F R f R f Adaptado de http://www.periodictable.com/Properties/A/YoungModulus.html R f 8 PALANCAS EN EL CUERPO HUMANO. EJEMPLO. Un hombre de 102 kg cuya columna vertebral mide 75 cm desde las cervicales hasta el final de la zona lumbar se inclina manteniendo la espalda recta. En esta postura el tronco pivota alrededor del sacro. Si suponemos que los diversos músculos de la espalda que actúan para mantenerla recta equivalen a un único músculo unido a la columna 15 cm por debajo de las cervicales y de manera que la tensión que ejerce forma 12º con la horizontal, calcular la tensión de ese hipotético músculo y cuál es la fuerza que se aplica sobre el sacro. Puede suponerse que el peso del tronco, la cabeza y los brazos es un 65% del peso del hombre y que el CM está situado en el centro de la columna vertebral. El peso del tronco, cabeza y brazos del hombre es W 102 9.8 0.65 650 N Observe que el diagrama de fuerzas y las dimensiones son las mismas que en el ejemplo anterior. T Sacro 15 cm El sacro es el pivote A del caso de la barra 12º N W A 75 cm A M N W T sin 12 244 N 15 cm 12º W Haciendo el mismo planteamiento de antes, la solución es 650 0.75 T 1954 N La resultante de estas fuerzas es 2 0.60 sin 12º M 2 N 2 1927 N M T cos 12 1911 N T N M F f R Observación: véase que la fuerza sobre el sacro es casi dos veces el peso del hombre, debido a que el ángulo de la 9 tensión con la horizontal es pequeño. EJEMPLO 2. PROBLEMA 2 (1º parcial 2012-2013) La figura muestra el diagrama de fuerzas sobre la cadera izquierda de una persona de 70 kg puesta en pie que apoya todo su peso sobre el pie izquierdo (ha encogido la pierna derecha de modo que el pie derecho no toca el suelo). Los músculos de la cadera izquierda deben contraerse para mantener la pelvis horizontal contrarrestando el peso del cuerpo. (a) ¿Qué género de palanca es el mostrado en la figura? Identifíquese el fulcro, la potencia y la resistencia. (b) Usando los valores de distancias y ángulos dados en la figura, calcular la fuerza FA realizada por los músculos de la cadera. b Fulcro 5 cm a) Palanca de primer género b) Cálculo de la fuerza: aplicamos la ecuación de momentos 75º W FA 14 cm W · a · sin 90º FA · b · sin 0 W ·14 · sin 90º FA · 5 · sin 75 0 FA Resistencia 5 cm 75º W 14 cm FA a W · a · sin 90º 14 · 70 · 9.8 1989 N b · sin 5 · 0.9659 10 EJEMPLO 3. PROBLEMA 3 (junio 2013) Calcular la fuerza de reacción en el codo y la fuerza Fm que ha de ejercer el bíceps para contrarrestar el peso del antebrazo (cuya masa es 2.4 kg) y del objeto que sostiene la mano (peso indicado con Fg, masa 3 kg). Puede suponerse que el centro de masa del antebrazo está a 20 cm de la articulación del codo. Datos de distancias en la figura. Suma de momentos respecto al codo (C): FC C Fm Fm 3 FA 20 Fg 40 0 FA Fg Suma de fuerzas (eje vertical) Fm FA 20 Fg 40 3 2.4 9.8 20 3 9.8 40 470.4 1176 548.8 N 3 3 FC Fm FA Fg 0 FC Fm FA Fg 548.8 2.4 9.8 2.4 9.8 548.8 23.52 29.40 495.88 N El signo negativo del resultado quiere decir que el vector FC tiene en realidad sentido contrario al indicado en el esquema 11 Algunos datos biométricos del cuerpo humano %h 100 %h 60 80 40 60 20 40 20 %h 40 Fig. 4.58. Centro de gravedad del cuerpo (CG), articulaciones (círculos negros) y posición del CG. de las partes del cuerpo (círculos blancos) de un hombre típico en posición inclinada (K & S, p. 92) 20 Datos biométricos promedio para el cuerpo de un hombre (Figuras 4.57 y 4.58). Masa m , altura h Fuente: K & S, p. 93 20 40 Fig. 4.57. Centro de gravedad del cuerpo (CG), articulaciones (círculos negros) y posición del CG. de las partes del cuerpo (círculos blancos) de un hombre típico en posición erguida (K & S, p. 92) %h Masa (% m ) Parte del cuerpo Tronco y cabeza 59,3 Brazos 5,3 Antebrazos y manos 4,3 Muslos 19,3 Piernas y pies 11,8 Posición del centro de gravedad Figura 4.57 (erguido) Figura 4.58 (inclinado) x (% h ) y (% h ) x (% h ) y (% h ) 10 70 26 52 14 75 35 45 24 64 34 29 12 42 11 40 12 10 19 17 18 ELASTICIDAD y DEFORMACIÓN Los cuerpos sometidos a esfuerzos se deforman Comportamiento elástico: la deformación D es proporcional a la causa C que la produce Deformación Punto fractura Esfuerzo máximo Deformación permanente Cuando desaparece la causa C, se recupera la forma original Límite elástico Deformación residual Causa deformadora (fuerza) 13 ELASTICIDAD y DEFORMACIÓN. LEY DE HOOKE Aplicación a un sistema simple: el resorte l0 La deformación en este caso consiste en un alargamiento En ausencia de fuerza aplicada Incremento de longitud Deformación x l l0 l F Aplicando fuerza x Ley de Hooke x F k La deformación es proporcional a la fuerza aplicada Válida mientras no sobrepasemos el límite elástico Fuerza a aplicar para conseguir un incremento unitario de la longitud k: Constante elástica del resorte Forma alternativa Aplicación directa: el dinamómetro Límite elástico F kx N/m (S.I.) F 1 / k pendiente Límite elástico k pendiente x Causa Fuerza deformadora (fuerza) aplicada 14 ELASTICIDAD y DEFORMACIÓN. LEY DE HOOKE (2) Formulación más general de la ley de Hooke. Tracción en materiales. Módulo de Young. l l0 F Causa deformadora: fuerza aplicada por unidad de superficie S Alargamiento relativo Deformación S Valores típicos Material E (´1010 N×m-2) Goma 0,0007 Cartílago 0,0024 Tendón 0,06 Hueso 2 Vidrio 7 Acero 20 Deformación: Alargamiento relativo l0 l l0 l0 F Ley de Hooke l El alargamiento relativo es proporcional a la fuerza aplicada por unidad de superficie l l0 1 F l0 E S E: módulo de Young Unidades S.I. Nm-2 Pendiente pequeña E grande Límite elástico Mayor E Material más elástico 1 / E pendiente Causa (fuerza) Fuerza aplicada pordeformadora unidad de superficie E • Sólo depende del material (no de la forma, geometría) • Sólo tiene sentido por debajo del límite elástico • Es tanto mayor cuanto más elástico sea el material 15 ELASTICIDAD y DEFORMACIÓN. LEY DE HOOKE (3) Alargamiento relativo Formulación más general de la ley de Hooke. Tracción y compresión. Módulo de Young. Más elástico TRACCIÓN. Cambio de forma y de volumen Fuerza por unidad de superficie (compresión) Límite elástico Menos elástico Fuerza por unidad de superficie (tracción) Límite elástico Acortamiento relativo Diferente comportamiento elástico en tracción y en compresión. (La gráfica representa un material más elástico bajo tracción que en compresión). COMPRESIÓN. Cambio de forma y de volumen Los materiales homogéneos (p. ej. el acero) tienen módulos de Young iguales en tracción y en compresión. Pero los materiales 16 heterogéneos (p. ej. el hormigón o los huesos) tienen módulos de Young diferentes en tracción y en compresión.