4_MARCO_TEORICOl_LM_IV rox
Anuncio

IV.- MARCO TEÓRICO
En esta sección se desarrollará el modelamiento del sistema esfera bobina, así como la
implementación del control ubicación de polos discretos.
4.1 Modelamiento del Sistema Esfera Bobina
Todos los sistemas que utilicen levitación magnética para sustentar elementos
ferromagnéticos deben contar, por lo menos, con dos elementos: un sistema eléctrico,
constituido por una fuente variable de voltaje y una bobina; un sistema electromecánico,
que utiliza la energía eléctrica almacenada en la bobina en forma de campo magnético
para compensar la energía mecánica. Esta última relación se comprueba físicamente
como el equilibrio de fuerza magnética y mecánica.
J1
R.
1
V(t)
.
i(t)
1
J2
.
.L
X
Fm
Fg
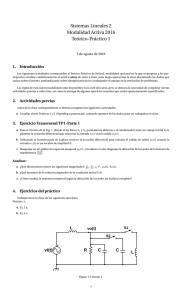
Figura 4 - 1. Esquema del sistema de levitación magnética
Usando la segunda ley de Newton se puede obtener la siguiente ecuación de
movimiento:
Donde:
m es la masa de la esfera,
k es el coeficiente de fricción viscoso,
Fb= fuerza de fricción magnética
g es la aceleración de la gravedad,
Fg=mg
F(y,i) es la fuerza generada por el solenoide,Fm
i es la corriente eléctrica.
8
En la Figura 4-1 se presenta un esquema de la planta a controlar. A continuación se
ilustra el desarrollo de algunas de las relaciones básicas para el modelamiento de la
planta:
( )=
=
∗
=
∗
=
∗
∗ ( )+
+
Ley de kirchoof
ec.4.1
Flujo magnético
ec,4,2
Ley de Newton
ec.4.3
Fuerza de gravedad
ec.4.4
La ecuación 4-1 expresa la suma de voltajes alrededor del lazo cerrado; la ecuación 4-2
muestra la relación entre flujo y corriente conocido como inductancia; y en la ecuación
4-3 se expresa la ecuación de equilibrio para las fuerzas presentes. La variable que
relaciona el sistema eléctrico y el mecánico es la fuerza magnética; es relativamente
simple mostrar que ésta se puede expresar como
v
=
ec.4.5
En donde L está definida por:
=
+
=
+
ec.4.6
Las constantes se hallan mediante pruebas experimentales. Teniendo en cuenta las
características del sistema a trabajar, esto es, masa de la esfera 66 gramos, y punto de
equilibrio 5 mm, se llega a:
L 0 =0.155 H,
L 1 =0.258 H,
g=9.81 m/s 2 ,
R=12.79 Ω ,
a = 0.00825.
9
Donde L0, L1 y a son constantes positivas. En la ec.4.6 Puede verificarse fácilmente que
el modelo presentado considera que la inductancia es máxima (L0+L1) cuando la pelota
está más cerca del solenoide y decrece a L0 cuando no hay pelota (x= ).
De las ecuaciones 4.1 a 4.6 se obtiene el modelo en variable de estado que se presenta
a continuación:
̇ =
̇ =−
∗
=
( −
∗
+
∗ +[ ∗
∗ ∗
ec.4.7
]
Una vez que se linealiza el modelo alrededor del punto de equilibrio, (5 mm), y
tomando en cuenta las constantes adicionales se tienen las siguientes relaciones:
= [
̇ =
=[
.
] ,
= ,
−
]∗
.
−
.
̅= .
.
∗
+
[ ],
.
= .
[
]
ec.4.8
En esta ecuación el vector de estado “x” corresponde a la posición, velocidad y
corriente, respectivamente.
4.2 Respuesta del Sistema en lazo Abierto
Una de las primeras cosas que queremos hacer con las ecuaciones de estado es encontrar
los polos del sistema; estos son los valores de s donde det(sI - A) = 0, o los eigenvalores
de la matriz A:
Mediante el siguiente archivo en matlab
A=[0 1 0;11.89 0 55.2; 0 -106.4 -37.3];
B=[0; 0; 2.9];
C=[1 0 0];
D=[0];
POLES=eig(A)
10
Este sistema posee la siguiente distribución de polos:
S 1 = 0.0756,
S 2 = -18.6878 +74.2629i,
S 3 = -18.6878 -74.2629i, es decir, es un sistema por naturaleza inestable, como lo
evidencia la ubicación del polo S 1 en el lado derecho del plano S.
Para verificar qué sucede con este sistema inestable en condiciones iniciales no nulas,
agregue las líneas siguientes a su archivo-m,
A=[0 1 0;11.89 0 55.2; 0 -106.4 -37.3];
B=[0; 0; 2.9];
C=[1 0 0];
D=[0];
POLES=eig(A)
t = 0:0.01:600;
u = 4.54*t;
x0 = [5 0 0.355];
[y,x] = lsim(A,B,C,0,u,t,x0);
h = x(:,1); %Delta-h es la salida de interés
plot(t,h)
4.2.1 Simulación del sistema en lazo abierto
Escribir el programa en maltaba y ejecutar el programa del archivo denominado LAB1.m
Figura 4-2 Respuesta del sistema en lazo abierto
11
Se aprecia cómo la distancia entre la bola y el electro magneto tiende a infinito, pero
probablemente la bola golpee la mesa o el piso primero (y también probablemente se
salga del rango donde nuestra linealización es válida).
4.3 Diseño de Control por Ubicación de Polos
4.3.1 Introducción
En esta sección diseñaremos el control en tiempo discreto usando la técnica
control ubicación
de
de polos. Asumimos que las variables de estado son medidas y
halladas por realimentación. En el sistema se considera que es completamente
controlable, y que los polos en lazo cerrado del sistema son reemplazados por polos
deseados del sistema de lazo cerrado con una apropiada matriz de realimentación de
estados. La presente técnica de diseño empieza con la ubicación de los polos en lazo
cerrado basado en la respuesta transitoria y/o los requerimientos de la respuesta en
frecuencia. Asumimos los polos deseados en lazo cerrado, estos son:
z = µ1 , z = µ2 , ... , z = µn (cuando se escoge el periodo de muestreo, se debe tener
cuidado que el sistema deseado no presente una señal de control grande, porque puede
ocurrir el fenómeno de saturación indeseable para el control).
Por otro lado se debe escoger una matriz de ganancia de estados realimentada apropiada
para que el sistema pueda ser completamente controlable.
Sea la ecuación de estado
x(k + 1) = Gx(k) + Hu(k)
(1)
Donde
- x(k) es el vector de estado (vector-n) en k- eximo instante de muestreo.
- u(k) es la señal de control (escalar) en k-eeximo instante de muestreo.
- G es la matriz de n × n.
- H es la matriz de n×1.
12
Asumimos la magnitud de la señal de control u(k) ilimitada. La señal de control es:
u(k) = −Kx(k)
(2)
Donde K es la matriz de ganancia de realimentación de estados de orden (1×n),
podemos reemplazar (2) en (1)
x(k + 1) = (G − HK)x(k)
(3)
Se debe de observar que los valores propios de (G − HK) son los polos deseados µ1 , µ2 ...
En lazo cerrado
Es necesario y es una condición suficiente para la ubicación de polos deseados, que el
sistema sea completamente controlable.
El método para determinar la matriz de ganancia de realimentación de estados K para el
sistema de control en tiempo discreto es el mismo que en tiempo continuo. Estos método
son los siguientes:
(i)
Método basado en la matriz de transformación
(ii)
Formula de Ackerman’s
4.3.1.1.
Método Basado en la Matríz de Transformación
Este método basado en la matriz de transformación de una sistema de forma canó
nica controlable, la matriz K es dada por.
K = [αn − an, αn−1 − an−1 , . . . ,.α1 − a1 ]T−1
(4)
Donde, ai i=1,2,...n son los coeficientes de la ecuación característica.
zI − G| = zn + a1 zn−1 + a2 zn−2 + ... + an −1 z + an = 0
(5)
y donde, αi i=1,2,...n son los coeficientes de la ecuación característica deseada del sistema
realimentado del sistema, es decir.
13
La matriz T es dada por.
T = MW
(7)
Donde M y W es dada por.
M = [H.GH. . . . .Gn−1 H]
(8)
Y
En el sistema la ecuación de estado es de la forma canónica controlable. La determinación de
la matriz de ganancia de realimentación de estados K es hallada en forma simple, porque la
matriz de transformación T es una matriz identidad. En este caso la matriz K se escribe como.
K = [αn − an , αn−1 − an−1, . . . . .α1 − a]T−1
(10)
Donde T = I.
4.3.1.2.
Método Basado en la Formula de Ackerman
La matriz de ganancia de realimentación de estados K puede darse por la formula de Ackerman.
K = [0
= [0
. . . 0 1][H.GH. . . . .Gn−1 H]ϕ (G)
. . . 0 1]M−1 ϕ (G)
(11)
Dónde.
M = [H.GH. . . . .Gn-1
Además .
La ecuación característica es el polinomio.
14
La matriz de estados realimentados K es determinado cuando el error es reducido a cero con
suficiente velocidad. Note que la matriz K no es única para el sistema dado, pero depende
de la ubicación de los polos deseados en lazo cerrado. La selección de los polos deseados o
la ecuación característica es un compromiso entre la rapidez de la respuesta del vector de
error y la sensitividad de los disturbios y medidas de ruidos.. Es decir si incrementa la respuesta
de la velocidad del error entonces el efecto adverso del disturbio y medidas de ruidos estos se
incrementan.
4.4. Diseño del sistema en tiempo continúo
Construyamos un controlador para este sistema. El esquema de un sistema de
realimentación completa de estado es el siguiente
Figura 4.3 Esquema del sistema con realimentación de estado
Recordemos que el polinomio característico para este sistema a lazo cerrado es el
determinante de (sI-(A-BK)).
Como las matrices A y B*K son ambas 3 por 3, el sistema tendrá 3 polos.
Usando realimentación completa de estado podemos ubicar los polos donde queramos.
Podríamos usar la función place para hallar la matriz de control, K, la cual nos dará los
polos deseados.
4.4.1 Condiciones de diseño y simulación
Antes de probar este método, tenemos que decidir dónde queremos que estén los polos
de lazo cerrado. Suponga que los criterios para el controlador son:
15
tiempo de establecimiento < 0.5 seg.
y sobrepico < 5%,
Entonces trataríamos de ubicar los dos polos dominantes en -10 +/- 10i (en zeta = 0.7 o
45 grados con sigma = 10 > 4.6*2).
El tercer polo lo ubicaríamos en -100 para empezar, y podemos cambiarlo luego
dependiendo en cómo es el comportamiento a lazo cerrado.
Borre el comando lsim de su archivo-m y todo lo demás después del mismo, entonces
agregue las líneas siguientes a su archivo-m,
A=[0 1 0;11.89 0 55.2; 0 -106.4 -37.3];
B=[0; 0; 2.9];
C=[1 0 0];
D=[0];
POLES=eig(A)
t = 0:0.001:1;
u = 4.54*t;
x0 = [5 0 0.355];
p1 = -10 + 10i;
p2 = -10 - 10i;
p3 = -100;
K = place(A,B,[p1 p2 p3])
lsim(A-B*K,B,C,0,u,t,x0);
Figura 4-4 Respuesta del sistema con control por ubicación de polos
16
4.4.2 Eliminación de sobre pico y simulación
El sobrepico es muy grande (habrán también ceros en la función de transferencia que
pueden incrementar el sobrepico; y no se los puede ver en la formulación espacio de
estado). Trate de poner los polos más lejos a la izquierda para ver si mejora la respuesta
transitoria (esto debería hacer también más rápida la respuesta).
A=[0 1 0;11.89 0 55.2; 0 -106.4 -37.3];
B=[0; 0; 2.9];
C=[1 0 0];
D=[0];
POLES=eig(A)
t = 0:0.001:1;
u =0*t;
x0 = [5 0 0.355];
p1 = -30 + 30i;
p2 = -30 - 30i;
p3 = -100;
K = place(A,B,[p1 p2 p3]);
lsim(A-B*K,B,C,0,u,t,x0);
Figura 4-5 sistema mejorado con ubicación de polos más alejados del eje imaginario
Donde el Ahora el sobrepico de la respuesta del sistema es menor
17
4.4. 3 Diseño del sistema con entrada de referencia
Ahora, tomaremos el sistema de control como el arriba definido y le aplicaremos un escalón de
entrada (elegimos un valor chico para el escalón, de modo que permanezcamos en la zona donde
es válida la linealización efectuada). Reemplace t, u y lsim en su archivo-m con lo siguiente,
A=[0 1 0;11.89 0 55.2; 0 -106.4 -37.3];
B=[0; 0; 2.9];
C=[1 0 0];
D=[0];
POLES=eig(A)
t = 0:0.001:2;
u = 0.001*ones(size(t)); ;
x0 = [5 0 0.355];
p1 = -30 + 30i;
p2 = -30 - 30i;
p3 = -100;
K = place(A,B,[p1 p2 p3]);
lsim(A-B*K,B,C,0,u,t,x0)
El sistema no copia para nada al escalón; no sólo en la magnitud que no es uno
Recordemos el esquema de arriba, no comparamos la salida con la referencia; en su
lugar medimos todos los estados, multiplicamos por el vector ganancia K, y entonces
restamos el resultado de la referencia. No hay razón para esperar que K*x vaya a ser
igual a la salida deseada. Para eliminar este problema, podemos escalar la entrada de
referencia para hacerla igual a K*x_ss (ss: estado estacionario). Este factor de escala se
llama a menudo (N-barra) Nbar; se introdujo como se muestra en el siguiente esquema:
Podemos obtener Nbar de Matlab usando la función rscale (Copie la siguiente línea de
código después de K =...).
Nbar=rscale(A,B,C,0,K)
Note que esta función no es estándar en Maltaba necesitará copiarla a un archivo-m nuevo para
usarla. Ahora, si queremos hallar la respuesta del sistema bajo realimentación de estados con la
18
introducción de la referencia, simplemente notemos el hecho de que la entrada está multiplicada
por este nuevo factor, Nbar:
lsim(A-B*K,B*Nbar,C,0,u,t)
El programa completo es el siguiente:
A=[0 1 0;11.89 0 55.2; 0 -106.4 -37.3];
B=[0; 0; 2.9];
C=[1 0 0];
D=[0];
POLES=eig(A)
t = 0:0.001:2;
u = 0.001*ones(size(t)); ;
x0 = [5 0 0.355];
p1 = -30 + 30i;
p2 = -30 - 30i;
p3 = -100;
K = place(A,B,[p1 p2 p3]);
Nbar=rscale(A,B,C,0,K)
lsim(A-B*K,B*Nbar,C,0,u,t)
Respuesta del sistema
Figura 4-6 Respuesta del sistema en lazo cerrado con entrada escalón unitario
19
4,5 Discretizacion del sistema levitador magnético
4.5.1 Espacio de estado Discreto
Lo primero a hacer es convertir las anteriores ecuaciones de espacio de estado continuas
a espacio de estado discreto.
Para hacerlo, usaremos la función del Matlab denominada c2dm.
Para usarlo c2dm, necesitamos especificar seis argumentos:
Cuatro matrices de espacio de estado (A, B, C, y D),
Tiempo de muestreo (Ts en seg/muestra),
y el 'method'.
Ya debería estar al tanto de cómo ingresar las matrices A, B, C, y D.
El tiempo de muestreo debería ser menor que 1/(30*BW) seg., donde BW es el ancho
de banda a lazo cerrado.
El método que usaremos es el mantenedor de orden cero ('zoh').
Asumiendo que la frecuencia del ancho de banda a lazo cerrado anda en 1 rad/seg. tanto
hacer el tiempo de muestreo 1/100 seg/muestra.
Ya estamos listos para usar c2dm. Ingrese los siguientes comandos a un archivo-m.
A=[0 1 0;11.89 0 55.2; 0 -106.4 -37.3];
B=[0; 0; 2.9];
C=[1 0 0];
D=[0];
Ts=1/100;
[G,H,C,J]=c2dm (A,B,C,D,Ts,'zoh')
Ejecutando el archive se obtiene:
G=
1.0006 0.0091 0.0023
0.1086 0.7524 0.4171
-0.0535 -0.8041 0.4700
H=
20
0.0000
0.0068
0.0219
C=
1 0
D= 0
0
Hemos obtenido el modelo en espacio de estado discreto
( + )
.
( + ) =
.
( + )
− .
.
.
.
.
.
− .
( )=[
4.5.2 Controlabilidad y Observabilidad
]
( )
( )
( )
( )
( ) +
( )
.
.
.
( )
El paso siguiente es verificar la controlabilidad y la observabilidad del sistema. Para que
el sistema sea de estado completamente controlable, la matriz de controlabilidad
=[
]
Debe ser de rango n. El rango de la matriz es el número de renglones independientes (o
columnas).
Análogamente, para que el sistema sea de estado completamente observable, la matriz
de observabilidad
También debe tener rango n
=
Como nuestra matriz de controlabilidad y matriz de observabilidad son '3x3', el rango
de ambas matrices debe ser 3. La función rank puede darle el rango de cada matriz. En
un archivo-m nuevo, ingrese los siguientes comandos y ejecútelo en la ventana de
comandos.
En la ventana de comandos, debería ver
21
Controllability = 3
Observability = 3
Esto prueba que nuestro sistema discreto es de estado completamente controlable y de
estado completamente observable.
4.5.3 Diseño del servo con estados realimentados y control integral
Consideremos un diseño de control digital para una planta de tipo 0. EL controlador digital
involucra estados realimentados y un control integral. Hallamos la ecuación del sistema
mostrado en la Figura 2, donde la planta no contiene integrador.
Para el diseño consideremos la ecuación de estado y de salida dados por
Figura 4.7 levitador magnético con realimentación de estados y control integral
La ecuación para el integrador es:
v(k)=v(k-1)+r(k)-y(k)
Entonces
Obtenemos:
22
También.
Obtenemos la ecuación de estado y de salida para el sistema en lazo cerrado.
Para una entrada escalón unitario rk r.
Para una entrada escalón, como k se aproxima al infinito, xk, uk, y vk aproxima un
valor constante x(∞), u(∞), y v(∞) respectivamente, también:
v(∞)=v(∞)+r(∞)-y(∞)
o
y(∞)=r(∞)=r
No hay estado estacionario. Sustituimos k = ∞ en la ecuación anterior, con ello
obtenemos.
Definimos:
Entonces tenemos:
23
Definimos
Finalmente obtenemos
La ecuación de estado puede ser reescrita como:
Dónde.
Usamos las líneas de código para encontrar las matrices de estado en lazo cerrado
G1= [G
-C*G
zeros(3,1)
1
]
H1=[ H
-C*H]
Obtenemos la ecuación de estado en lazo cerrado es:
w(k)
24
4.5.3.1 Matrĺz de Controlabilidad y Polos deseados discreto
El sistema controlable en todos sus estados si el rango de la matríz de controlabilidad es
del orden del sistema.
% controlabilidad
M=[H1 G1*H1 G1*G1*H1 G1*G1*G1*H1];
rankM=rank(M)
Los polos deseados
Ts=0.01;
zeta=0.7;
wn=4.6/(Ts*zeta);
u1=exp((-zeta*wn+1j*wn*sqrt(1-zeta^2))*Ts);
u2=conj(u1);
u3=0.95;
u4=0 .05;
La Figura muestra los polos deseados en el plano z
Figura 4.8 Plano z
25
4.5.3.2 Diseño del Controlador discreto
Para completar el diseño encontramos la ganancia de realimentación de estado y la
ganancia integral, desde el método de Ackerman.
J = [u1 0 0 0
0 u2 0 0
0 0 u3 0
0 0 0 u4];
% Ecuación característica
deseada
Pj=poly(j);
% Hallamos Phi(G), la función polyvalm evalua j en función de G
Phi=polyvalm(poly(j),G1);
% Fo
rmula de A c ke r ma n
KK=[0 0 0 1]*inv(M)*Phi;
eigK=eig(G1-H1*KK);
k1=KK(1);
k2=KK(2);
k3=KK(3);
kI=-KK(4);
K=[k1 k2 k3];
Resultan las ganancias
K =[798.0193 49.6036 44.2040]
y kI = [19.6592}
La ecuación en lazo cerrado integra las ganancias de estado e integral halladas previamente.
GG=[ G-H*K
-C*G+C*H*K
H*kI
1-C*H*kI];
CC=[C 0];
HH=[0
0
0
1];
DD=0;
[num,den]=ss2tf(GG,HH,CC,DD);
F=tf(num,den,Ts);
Resultando
26
GG = [ 0.9817 0.0080 0.0013 0.0005
-5.2892 0.4169 0.1181 0.1330
-17.5380 -1.8909 -0.4985 0.4307
-0.9817 -0.0080 -0.0013 0.9995]
CC = [ 1
0
0
0]
HH = [ 0
0
0
1]
DD = [0]
.
( + )
− .
=
( + )
− .
− .
.
.
− .
− .
Transfer function:
( )=[
.
.
− .
− .
]
.
.
.
.
( )
( )
( )
+
( )
rk)
.
0.0004656 z^2 + 0.00165 z + 0.0003857
G(z) = ------------------------------------------------------------------------z^4 - 1.9 z^3 + 0.9019 z^2 + 0.0001609 z + 9.119e-005
4.5.3.3 Respuesta a una Entrada Escalón Unitario
La respuesta del sistema en lazo cerrado debido a una entrada escalón unitario se
muestra en la Figura.
tk=0:Ts:8;
u=ones(size(tk));
yd=lsim(F,u,tk);
plot(tk,yd)
title('Respuesta del sistema ante una entrada escalon')
ylabel('desplazamiento en mm')
xlabel(' time en seg')
grid
27
Figura 4.9 respuesta del sistema ante escalón unitario
4.6 Construcción del sistema de levitación Magnética
En esta sección se describen cada uno de los pasos necesarios para el desarrollo de un
sistema de levitación magnética: soporte, actuador, sensores y etapa de potencia; se
detallan cada una de las partes y las dimensiones que componen el sistema de levitación
magnetica , así como los tipos de material utilizados y el motivo de su selección
A continuación se describirá de forma detallada cada uno de los modelos que componen
todo el sistema, luego se presentara un diagrama circuital correspondiente a cada uno de
los bloques
28
Figura 4.10 14. Diagrama de bloques del Levitador Magnético
4.6.1 Estructura del soporte del levitador magnético
En la construcción de un soporte para un levitador magnético se deben considerar los
siguientes factores: dimensiones, rigidez mecánica y la no magnetización del material
para evitar el desvió de las líneas del campo magnético. Haciendo consideración de los
factores mencionados anteriormente, se ha seleccionado el policarbonato, ya que a pesar
de ser un material plástico cumple con la rigidez necesaria para nuestra aplicación, es no
magnetizable y fácil de manipular, entre otras de sus características. En la Tabla 4.1 se
pueden ver las especificaciones de la hoja de policarbonato utilizada.
Tabla 4.1: Especificaciones del material utilizado.
Descripción
Dimensiones (in)
Largo
Ancho
espesor
24
16
1/4
La idea básica de la estructura del prototipo se muestra en la Figura 4.11. El soporte está
conformado de seis piezas: una base superior, la cual es utilizada como soporte del
actuador; dos paredes laterales donde son colocadas las dos partes que constituyen el
29
sensor de posición; una pared trasera que es utilizada para simular un cubo y además
ayudar a la base superior con el peso del actuador; una base inferior que da soporte al
conjunto de piezas antes mencionadas; y dos piezas pequeñas que son colocadas debajo
de la base inferior con el fin de elevar la plataforma unos centímetros extras. Las
dimensiones de cada una de las piezas que constituyen al soporte fueron elegidas
considerando el ´área suficientes para cada una de las partes que constituyen un
levitador magnético. En la Tabla 4.2 se muestran las dimensiones de cada una de las
piezas.
Tabla 4.2: Medidas para la elaboración del cubo de policarbonato.
Nombre de la pieza
Descripción
Medidas (pulgadas)
A
Base inferior
(11x8.5)in
B
Soporte inferior derecho
(8.5x1)in
C
Soporte inferior izquierdo
(8.5x1)in
D
Pared lateral derecha
(9x6)in
E
Pared trasera
(9x6)in
F
Pared lateral izquierda
(9x6)in
G
Base superior
(6x6)in
Figura 4.11: Soporte principal del levitador
30
4.6.2. Actuador
El dispositivo actuador es un electroimán del tipo solenoide de 2.75in de altura por
1.54in de dinámetro, el cual está constituido por 600 vueltas de cable de cobre del No.
23, enrollado alrededor de un núcleo de hierro de 4in de largo y 0.312in de diámetro.
La consideración tomada para el diseño de este dispositivo, ha sido la corriente máxima
capaz de soportar, considerando hasta 10A como máximo. La resistencia promedio de la
bobina es de aproximadamente 5.6Ω y una inductancia promedio de 38.2mH.
En la Figura 4.12, se muestra el actuador y el núcleo de hierro, así como las
dimensiones de cada uno de ellos.
Figura 4.12: Diseño del actuador implementado.
4.6.3. Sensor
La selección de los sensores viene a ser de suma importancia, ya que no es posible hacer
levitar una esfera de material ferromagnéticos sin un buen sensado de la posición en que
se encuentra dicho objeto. Para el diseñó de la plataforma de levitación se ha
considerado un sensor de tipo ópticos eligió la tecnología optoelectrónica por las
siguientes características que presenta:
1. La tecnología de sensado por infrarrojo no requiere unión mecánica alguna.
2. El tiempo de respuesta es inferior a 40µs.
3. La alimentación es sencilla y el consumo de energía.
31
4. El tamaño, peso y costo es muy reducido.
De entre varios sensores estudiados fueron elegidos el clásico Diodo Emisor de Luz
Infrarroja (IRED) y el opto transistor. El IRED utilizado es el IR383, es un diodo emisor
de luz infrarroja azul transparente de 5mm de diámetro, con longitud de onda de 440nm,
1.3v típicos en polarización directa y un ´ángulo de 12 grados para transmisión a mayor
distancia. El opto transistor seleccionado es el PT1302B/C2, el cual cuenta con un filtro
de luz de día, 7v de colector a emisor y 5ms de tiempo de respuesta. Es importante
señalar que el filtro de luz con el que cuentan los opto transistores utilizados para el
dise˜no del sensor no elimina en su totalidad el error causado por los efectos de la luz
ambiente sobre ´el, debido a que el material utilizado para el soporte base es
transparente y la retención de luz es muy escasa. Para la eliminación del error por causa
de la luz ambiente, viene a ser necesario el diseñar de un circuito capaz de eliminar este
error.
4.6.4. Minimización del error en el sensor por perturbaciones y
sensado de la posición
En la Figura 4.13 se muestra el circuito diseñado para el correcto sensado de la
posici´on del objeto a levitar. Como se puede apreciar, el circuito cuenta con un diodo
emisor de infrarrojos (IRED), el cual incide su luz sobre dos optotransistores.
Inicialmente por razón de la distancia y la luz ambiente que es incidida, evita que la luz
emitida por el IRED sea recibida en un 100 % en los optotransistores, dando as´i una
lectura inicial de 1.8v aproximadamente en cada dispositivo. Esta lectura es considerada
como el error inicial.
Eliminación del error inicial. El error de valor inicial es el primer problema a resolver.
Por lo que, se ha hecho la suma del error en cada optotransistor, el cual da un valor
32
aproximado de 3.6v. Este error es eliminado implementando un circuito restador con
op-amp’s, donde la señal sumada es una de las entradas de un amplificador de diferencia
y la otra entrada es se˜nal de referencia constante de 3.6v, con esto el error es eliminado
y aproximado a cero.
En la Figura 4.13 además de mostrarse el circuito de eliminación del error en el sensor,
también es agregada la parte del acondicionamiento de la señal que nos proporciona la
posición en que se encuentra la esfera de hierro. Este circuito esta constituido por un
amplificador de diferencia, al cual es colocado en su entrada no inversora la señal de
referencia que indica la posición de levitación deseada. En la entrada inversora es
colocada la señal de error proveniente de los sensores, donde la diferencia entre ambas
entradas se considera como la posición actual de la esfera. En la Tabla 3.3 son
mostrados cada uno de los voltajes reales obtenidos del circuito
Figura 4.13: Circuito diseñado para el sensado de la posición.
El voltaje Va es considerado como la suma de los voltajes en los optotransistores 1 y 2,
que son causados por los efectos de la luz ambiente sin la presencia de la esfera de
hierro; Va está representado por [8; 4].
=
+
33
Donde Vs1 y Vs2 son los voltajes medidos en los optotransistor 1 y 2 respectivamente.
El voltaje Vb es considerado como la diferencia del voltaje Va y el voltaje de referencia
Vref1, esto con el fin de eliminar el voltaje Va a proveniente de los sensores. Vb está
representado por [8; 4],
Vb = 2Vref1- Va
El voltaje de salida del circuito mostrado en la Figura 4.13 es considerado como el error
de posición e(t) el cual está dado por la diferencia de Xo y X(t), por lo que el error de
posición es representado por,
e(t) = X0 - X(t),
Donde X0 es considerada como la posición deseada o referencia de levitación y X(t) es
la posición actual donde se encuentra la esfera.
Tabla 4.3: Valores de voltajes medidos sin la presencia de la esfera en el circuito de
sensado.
Sensor de velocidad
El diseño del sensor de velocidad corresponde a un derivador aproximado con un
tiempo de respuesta de 1 mS, como se muestra en la Figura 4 .14 . Como es sabido, un
derivador análogo es muy sensible a ruidos de cualquier tipo, por lo que es
indispensable utilizar un filtro, que para el caso es de primer orden. Adicionalmente se
agregó un segundo filtro a la salida. Esta configuración tuvo excelentes resultados en
cuanto a insensibilidad al ruido; y además, el tiempo de retardo asociado a los filtros de
34
POS
1
X
1/105s
1/1055s+1
Derivador
Aproximado
k
Ganancia
1
1/5000s+1
Fitro de Salida
VEL
1
vel
Figura 4.14. Función de transferencia del derivador aproximado, sensor de velocidad
Primer orden fue suficientemente pequeño; así el valor de velocidad fue lo
suficientemente actual para el controlador. En este caso se habla de un retardo igual a 5
mS
El derivador aproximado fue construido con base en integradores, los cuales son menos
propensos a los ruidos que los primeros. El filtro de salida se construyó como la
configuración de un RC serie.
C. Sensor de corriente
Para su construcción se utilizó un sensor de efecto hall análogo lineal, el cual posee un
rango de funcionamiento de ± 900 Gauss, con una salida de 0 a 5 voltios y cero campo
en 2.5 voltios. La corriente que se desea medir pasa por una pequeña bobina de
medición, la cual se encuentra arrollada alrededor de un núcleo en forma de toroide;
esta corriente crea un campo que gira alrededor del núcleo, el cual posee una ranura en
la que se instala el sensor de efecto hall; de esta manera la lectura de corriente se
traduce a campo y este finalmente en voltaje. El número de vueltas de la bobina de
medición es tal que la corriente máxima de operación del sistema corresponda a la mitad
de la salida máxima del sensor, es decir 1.25 voltios. Un diagrama de este montaje
puede verse en la Figura 4.15.
35
Figura 4.15. Sensor de corriente
La función de transferencia correspondiente es:
La ganancia del sensor se obtuvo experimentalmente alimentando con corriente y
tomando la lectura de voltaje de salida. El tiempo de retardo se midió realizando el
diagrama de Bode del sensor; en este caso se introdujo una señal de corriente senoidal
de frecuencia controlada, lo que resulto en una frecuencia de corte de 300 Hz.
4.6.5. Etapa de potencia
La etapa de potencia es la que provee la energía eléctrica necesaria al actuador
(electroimán).. Se ha cuidado aislar la etapa del circuito que maneja potencia de las
etapas de baja potencia para evitar ruidos inducidos, interferencias o posibles voltajes
inversos inducidos por el electroimán que puedan causar un daño al circuito.
Este módulo es de vital importancia para el manejo del electroimán ya que este se
encargará de suministrar la corriente necesaria al mismo, asimismo brindara un
aislamiento total del circuito de control para evitar problemas de ruido y transientes que
puedan incidir sobre el funcionamiento de dicho circuito y/o su destrucción. A
36
continuación se mostrara el diagrama circuital y una explicación detallada de cada una
de las partes que lo componen.
Figura 4.16. Módulo de potencia con optoacoplador.
Como se menciono antes este circuito cumple con dos funciones: aislamiento y
potencia. La primera está compuesta por el optoacoplador que tomará una señal de
entrada desde la terminal 1 para excitar el LED que esta en su interior y a su ves el
fototransistor, este por su lado cumple con la puesta a tierra de la resistencia R4,
llevando así la base del transistor Q1 a tierra y por tanto poniendo el transistor en corte.
Cuando el transistor interno del optoacoplador esta en corte entonces en la base del
transistor Q1 se ve un voltaje que es el resultado de aplicar un divisor de tensión entre la
resistencia R4 y R5, este voltaje es suficiente para excitar la compuerta del transistor Q1
y poner el mismo en saturación y permitir que por la bobina circule una gran corriente;
el diodo tener dispuesto entre la compuerta de Q1 y tierra compone un sistema de
protección contra sobre voltajes para evitar que Q1 se dañe debido a que el voltaje
máximo que tolera es de 20 V. El diodo D1 es un diodo Schottky que está dispuesto allí
37
para evitar que las corrientes transitorias de la bobina dañen el transistor, se escogió un
diodo de este tipo debido a que se requiere que la velocidad de conmutación sea lo mas
rápida posible para evitar que pasen corrientes a través del mismo cuando el circuito
trabaja a altas frecuencias.
Aparte de esto se logra notar que está dispuesta una pequeña fuente de poder, la misma
será utilizada para alimentar un cooler que enfriara el disipador tanto del propio
regulador (7812) como del transistor Q1.
4.6.6 Fuente de Poder
Este es una de las partes más importantes de todo el sistema debido a que es quien
suministra toda la corriente necesaria al electroimán, y brinda alimentación a los demás
módulos. Este módulo aunque esta descrito como un solo bloque en si está compuesto
por dos circuitos aislados totalmente uno de otro, para efectos de este proyecto debido a
que el transformador de potencia posee solamente un secundario el cual suministra
aproximadamente 34 Vp a la carga (electroimán).
Se procedió a utilizar dos transformadores, el descrito anteriormente y un transformador
de soporte que servirá para la alimentación del resto del circuito, el por qué de esto se
debe principalmente al aislamiento del circuito de control con el circuito de potencia ya
que se van a manejar amperajes que están por encima de los 10 amperios y se manejaran
cargas inductivas, entonces se quiere evitar que los picos inducidos por la corriente
almacenada en la bobina en un determinado instante afecten el rendimiento del circuito
de control, así como en el peor de los casos pudiera dañarlo y estropear todo. A
continuación se presentara el diagrama circuital
figura 4.17 de este módulo y se
explicara el funcionamiento del mismo.
38
Figura 4.17. Fuente de alimentación para el electroimán.
En este diagrama figura 4.17 se representa el circuito correspondiente a la fuente que
alimentara el electroimán. El funcionamiento es bastante sencillo, consta de un
transformador un puente rectificador y condensadores electrolíticos. El puente
rectificador tolera una corriente máxima de 35 amperios y debe llevar consigo un buen
disipador de calor debido a que cuando esta en pleno funcionamiento se calienta
bastante, los condensadores son 8 de 15000uF por 50V que suman unos 120000uF más
3 capacitores de 4700uF que suman 14100uF sumados a los 120000 anteriores
equivalen a un capacitor de 134100uF. Estos capacitares son los responsables del
filtrado de la señal saliente del rectificador que es el valor absoluto de la señal de
entrada, el por que de esta capacitáncia tan alta se debe a la cantidad de corriente que
deberá pasar por la terminal Vo lo que sugiere un descarga muy violenta de los
capacitares cuando el la señal saliente del rectificador comienza a bajar desde su valor
pico hasta cero. Cabe destacar que en este circuito no se muestra ningún otro elemento
de regulación de voltaje, esto se debe a que para evitar la mayor cantidad de perdidas
posibles el electroimán se alimentara directamente desde los 34V salientes de la
terminal Vo permitiendo controlar la corriente promedio que circulara por el
electroimán mediante un circuito PWM y su correspondiente transistor de potencia
(MOSFET para este caso), esta parte será descrita con más detalle en el módulo de
potencia.
39
Por otro lado en el diagrama siguiente figura 4.18 se explicara los elementos que
componen la fuente que alimentara los restantes módulos
Figura 4.18. Fuente de alimentación para los circuitos restantes.
Como se logra apreciar esta es una fuente de poder dual, esto se debe a que en el
circuito de sensado se utilizaran amplificadores operacionales que requieren
alimentación dual para su correcto funcionamiento.
En este circuito de la figura 4.18 se puede apreciar tres etapas: rectificación, filtrado y
regulación. La primera consta del puente rectificador que obtiene el valor absoluto de la
señal de entrada proveniente del transformador, seguido de este en la salida de dicho
rectificador le sigue dos condensadores de 100uF que harán que se obtenga una señal
completamente recta, esta a su ves será la entrada del circuito de regulación compuesto
principalmente por el circuito integrado LM7805 que es un regulador de voltaje muy
popular con una entrada de hasta 37V y una salida regulada de 5 voltios, en la terminal
3 de este CI se encuentra un capacitor necesario para estabilizar la señal de salida del
regulador (es requerido) y los diodos D1 y D2 son diodos de protección para conducir
las corrientes que circulen en sentido contrario a tierra mediante el diodo D1 y los
sobrevoltajes (voltajes por encima del voltaje que se encuentra en la terminal 1 del
7805) los conducirá hacia la fuente mediante el diodo D2.
40