control y monitoreo remoto de un proceso utilizando el plc s7-300
Anuncio

INSTITUTO TECNOLÓGICO Y DE ESTUDIOS SUPERIORES DE MONTERREY
CAMPUS TOLUCA
DISEÑO Y CONSTRUCCIÓN DE UN LABORATORIO VIRTUAL
UTILIZANDO REDES DE PETRI
TESIS
Que para obtener el grado académico de
MAESTRO EN CIENCIAS
En Ingeniería Electrónica
PRESENTA
CARLOS VÁZQUEZ HURTADO
ASESOR
DR. LUCIANO CHIRINOS GAMBOA
CO-ASESOR
M. EN C. ALAÍN CÉSAR GONZÁLEZ GARCÍA
TOLUCA, MÉXICO
DICIEMBRE 2002
ÍNDICE
Resumen...........................................................................................................
vi
Capítulo 1. Introducción..................................................................................
1
Introducción..................................................................................
Antecedentes...............................................................................
Definición del problema................................................................
Objetivo........................................................................................
Justificación..................................................................................
Limitación y delimitación..............................................................
Organización de la tesis...............................................................
1
2
4
6
6
7
7
Capítulo 2. Marco teórico................................................................................
9
1.1.
1.2.
1.3.
1.4.
1.5.
1.6.
1.7.
Introducción..................................................................................
Sistemas de Eventos Discretos...................................................
Introducción a las redes de Petri..................................................
2.3.1. Estructura de redes de Petri..............................................
2.3.2. Gráficas de redes de Petri.................................................
2.3.3. Marcajes de redes de Petri................................................
2.3.4. Reglas de ejecución de las redes de Petri........................
2.3.5. Espacio de estados de redes de Petri...............................
2.3.6. Propiedades de las redes de Petri....................................
2.3.6.1. Seguridad..........................................................
2.3.6.2. Acotamiento.......................................................
2.3.6.3. Conservación.....................................................
2.3.6.4. Vivacidad ..........................................................
2.3.6.5. Alcanzabilidad...................................................
2.3.7. Técnicas de análisis
2.3.7.1. Árbol de alcanzabilidad
2.3.7.2. Métodos matriciales
2.3.8. Redes de Petri temporizadas
2.3.8.1. Inclusión del tiempo en un modelo de RdP.......
2.3.8.2. Redes de Petri con transiciones temporizadas.
Estabilidad, control y regulación..................................................
9
9
10
10
11
12
13
14
15
15
15
15
15
16
16
16
16
18
18
18
19
Capítulo 3. Metodología..................................................................................
20
2.1.
2.2.
2.3.
2.4.
3.1.
3.2.
3.3.
Introducción..................................................................................
Diagrama de flujo de la metodología...........................................
Metodología..................................................................................
3.3.1. Definición del problema.....................................................
3.3.2. Diagrama técnico...............................................................
3.3.3. Diagrama de estados........................................................
3.3.4. Reglas de ejecución..........................................................
3.3.5. Definición de plazas y transiciones...................................
3.3.6. Asignación de marcas.......................................................
20
20
21
21
21
22
23
24
24
ii
3.3.7. Gráfica de la red de Petri...................................................
3.3.8. Análisis de estabilidad.......................................................
3.3.9. Control y regulación...........................................................
3.3.10. Simulación........................................................................
3.3.11. Redes de Petri temporizadas...........................................
25
26
26
27
27
Capítulo 4. Pruebas y resultados...................................................................
29
4.1.
Pruebas........................................................................................
4.1.1. Validación del modelo de RdP del sistema.......................
4.1.2. Tiempo de respuesta del programa WinCC......................
4.1.3. Tiempos de acceso dentro del Campus............................
4.1.4. Tiempos de acceso fuera del Campus..............................
4.1.5. Pruebas del Laboratorio Virtual en quipos de trabajo.......
Resultados...................................................................................
4.2.1. Experimento virtual, la forma tradicional...........................
4.2.1.1. Definición del problema....................................
4.2.1.2. Diagrama técnico..............................................
4.2.1.3. Grafcet..............................................................
4.2.2. Modelado del experimento virtual utilizando RdP.............
4.2.2.1. Definición del problema....................................
4.2.2.2. Diagrama técnico..............................................
4.2.2.3. Diagrama de estados........................................
4.2.2.4. Reglas de ejecución..........................................
4.2.2.5. Definición de plazas y transiciones...................
4.2.2.6. Asignación de marcas.......................................
4.2.2.7. Gráfica de la red de Petri..................................
4.2.2.8. Análisis de estabilidad.......................................
4.2.2.9. Control y regulación..........................................
4.2.2.10. Simulación........................................................
4.2.3. Implementación.................................................................
4.2.3.1. Elección de Hardware y Software.....................
4.2.3.2. Modos de operación..........................................
4.2.3.3. Manipulación de los modos de operación.........
4.2.3.4. Organización del programa...............................
4.2.3.5. Descripción de las funciones............................
4.2.3.6. Asignación de entradas y salidas.....................
4.2.4. Interfase gráfica con WinCC.............................................
4.2.4.1. Descripción de la pantalla.................................
4.2.5. Visualización mediante cámara de red.............................
29
29
29
29
31
31
33
33
33
34
34
35
35
35
36
36
37
38
39
39
40
42
43
43
45
46
47
48
49
51
51
52
Capítulo 5. Resultados y conclusiones.........................................................
53
4.2.
Conclusiones................................................................................
Trabajo futuro...............................................................................
53
54
Referencias......................................................................................................
55
5.1.
5.2.
iii
RESUMEN
El objetivo de este proyecto es el de proveer a los estudiantes tanto del ITESM Campus
Toluca como de la Universidad de Ciencias Aplicadas de Esslingen, con acceso remoto, al
proyecto del Laboratorio Virtual. El Laboratorio Virtual se compone en este momento por
un experimento electro-neumático conectado a una computadora personal (servidor) vía un
Controlador Lógico Programable (PLC). El usuario puede utilizar un navegador de Internet
para acceder al servidor de VNC (Virtual Network Computing) y enviar los parámetros o
comandos requeridos al PLC.
El modelado puede ser hecho usando redes de Petri o herramientas tradicionales como
Grafcet o diagrama de estados. Se ha diseñado un simulador propio para el experimento
virtual de manera tal que los estudiantes puedan probar e implementar sus controladores de
forma segura. Con el propósito de llevar un seguimiento más real del proceso se añade una
cámara de red al servidor.
iv
CAPÍTULO 1
INTRODUCCIÓN
1.1.
INTRODUCCIÓN
El propósito de está tesis es modelar, simular e implementar un experimento electroneumático. Dicho experimento supone un proceso industrial sencillo en donde el
dispositivo toma y coloca piezas. Para ubicar al experimento dentro de un contexto global
denominado en adelante “Laboratorio Virtual” se conectará el sistema electro-neumático a
una computadora personal vía un Controlador Lógico Programable (PLC, acrónimo en
inglés de Programmable-Logic Controller). La computadora funcionará como servidor de
VNC [5] (Virtual Network Computing) y proveerá a los estudiantes de acceso remoto a
través de Internet al Laboratorio Virtual.
El proyecto del Laboratorio Virtual surge en el año 2001. Es un trabajo coordinado entre
dos universidades para ofrecer a sus estudiantes la oportunidad de trabajar juntos, de
resolver problemas considerando diferentes puntos de vista, de aprender nuevos idiomas y
de intercambiar culturas.
El Laboratorio Virtual brinda desde el punto de vista técnico el uso de herramientas
industriales de hardware y software reales. En cuanto al hardware se utilizan actuadores
neumáticos de FESTO
y
para control se emplean PLCs S7-300 de SIEMENS [2].
Hablando de software se utiliza STEP 7 [3] para programar los PLCs. Para visualización y
control se usa WinCC. Este último es un sistema industrial y tecnológicamente neutral
capaz de manejar despliegue de gráficas y tareas de control de sistemas en procesos de
automatización y producción [4].
El concepto de Laboratorio Virtual se ha manejado ya con un enfoque diferente dentro del
ITESM Campus Toluca, así por ejemplo se puede citar el proyecto de dos estudiantes que
en el 2002 trabajaron bajo el sistema operativo en tiempo real QNX y utilizando los
lenguajes de programación Java y C++ [1] desarrollaron un programa para control de
procesos a distancia basado en una plataforma determinística.
_____________________________________________________________________________ 1
Capítulo 1. Introducción
1.2.
ANTECEDENTES
El Internet fue creado en 1974 como una herramienta de comunicación para institutos de
investigación, universidades y la milicia [6]. Las aplicaciones del Internet en la industria
son relativamente nuevas y se refieren principalmente al uso de PLCs conectados en línea.
Realizar el control de un proceso de manera remota tiene la ventaja de descentralizar el
proceso de automatización y control. Una de las principales desventajas de usar este
método es que el tiempo desde que se envía un comando al controlador hasta que éste lo
recibe y actúa es impredecible. Éste tema ha sido abordado con anterioridad por
investigadores de diversas universidades y en la industria. A continuación se mencionan
algunos trabajos similares al que en este proyecto se propone:
Jorge Tuttas y Bernard Wagner trabajaron en un proyecto titulado “Distributed Online
Laboratories”. El objetivo de este proyecto es el desarrollo de nuevos métodos de
aprendizaje así como del equipo apropiado para el aprendizaje y entrenamiento basados en
experimentación distribuida [7]. Utilizando herramientas como HTML y Java para
construir un laboratorio remoto hace posible que estudiantes de las universidades de
Stanford (Stanford Learning Lab) y la universidad de Hannover (Learning Lab Lower
Saxony) diseñen, implementen y prueben controladores discretos.
Mohamed Shanen y sus colaboradores publicaron en 1998 un artículo titulado “Remote
Laboratory Experimentation” en donde describen un proyecto cuyo objetivo es el de
proveer a los estudiantes de Case Wetern Reserve y Copoper Union Universities con acceso
remoto al control de proceso bytronico [8]. Ellos se valían de un navegador para que el
usuario ingresara a su página desde cualquier parte del mundo. Por éste medio podían
enviar los parámetros hasta un servidor LabVIEW G conectado a la unidad de control a
través de un PLC.
Celal Batur y un grupo de investigadores publicaron en Junio del 2000 un artículo en donde
explican cómo sintonizar de manera remota un controlador de posición PID vía Internet [9].
En su publicación discuten principalmente dos problemas que encontraron al momento de
realizar su aplicación; el primero se refiere a los retardos impredecibles en la comunicación
_____________________________________________________________________________ 2
Capítulo 1. Introducción
en el sistema de Internet, el segundo se refiere a la confiabilidad de tal metodología de
control.
Jin Bin trabajó con su equipo para desarrollar un control jerárquico flexible para una línea
de ensamble automatizada [10]. Él y su equipo utilizan un controlador lógico programable
basado en redes Petri como estación de control para realizar operaciones de ensamble
individuales. Por otro lado, mediante un controlador de línea, forman un número de
operaciones de ensamble separadas dentro de una línea de ensamble. Finalmente para
interconectar las estaciones de control con los controladores de línea se utiliza una red de
área local de bajo costo.
S.C. Lauzon desarrolló en colaboración con otros tres investigadores una aplicación de la
teoría para sistemas de eventos discretos en la manufactura flexible [11]. En su artículo
presentan la implementación del modelo de Sistemas de Eventos Discretos en conjunción
con la tecnología de PLCs para realizar el control en la manufacturación de celdas de carga.
Los autores proponen el uso de una computadora personal que posea la capacidad para
generar automáticamente estrategias de supervisión y control en línea, así como su
consecuente descarga en el PLC.
William Burke y Eamonn Byrne desarrollaron un sistema de control de temperatura
confiable para el tanque de vació Alcator C-MOD [12]. Mediante un PLC monitorean 472
termocoples tipo K para medir las temperaturas y controlar los calentadores usando bancos
de relevadores de estado sólido. Además el PLC ofrece logging de datos y capacidad para
realizar diagnósticos en línea.
Noriichi Kanaya desarrolló junto con Asaoka y Maezawa un sistema de control de una
bomba de vació usando controladores lógicos programables sobre una red TCP/IP para el
anillo de almacenamiento 2.5-GeV [13]. Los investigadores utilizan un PLC para controlar
la corriente de dieciséis relevadores de estado sólido, logrando con ello el control
simultaneo de dieciséis bombas. Puesto que los PLCs que usan cuentan con un puerto de
red TCP/IP es posible conectarlos a una computadora personal (PC). Entonces la PC puede
_____________________________________________________________________________ 3
Capítulo 1. Introducción
controlar automáticamente los PLCs enviando un conjunto de instrucciones a través de la
red.
En el tema de los simuladores Yaobin Chain desarrollo un simulador para control en tiempo
real de sistemas de manufactura automatizados utilizando redes de Petri [14]. El software
ofrece una herramienta de diseño intuitivo con enfoque gráfico y con capacidad para
corregir errores, muy conveniente para modelado y control de sistemas de manufactura.
Gasper Music y Drago Matko presentan un artículo llamado “Petri net based control of a
modular production system” [15] en donde plantean un enfoque sistemático para diseño de
control secuencial. Su primera meta es mostrar como los modelos con redes de Petri pueden
ser usados como herramienta para la especificación del control secuencial que permita el
desarrollo sistemático y el análisis de un modelo de especificación. En segundo lugar
muestran como el modelo de especificación puede ser usado como dato de entrada para el
segundo nivel de coordinación empleando conceptos de control de supervisión. Al final
presentan un método de implementación.
El doctor Zvi Retchkiman escribió un artículo sobre la teoría de estabilidad para una clase
de sistemas dinámicos [16]. En ellos ofrece la teoría de estabilidad básica que se necesita
para entender las contribuciones del autor al campo de los sistemas de eventos discretos.
Ofrece además fórmulas simplificadas para el análisis de estabilidad de sistemas modelados
con redes de Petri.
1.3.
DEFINICIÓN DEL PROBLEMA
¿Qué ventajas ofrece a los estudiantes del sistema ITESM Campus Toluca contar con un
Laboratorio Virtual que les permita modelar, simular, monitorear y controlar procesos
industriales?
La creciente demanda por cursos en línea con una validez y respaldo académico fue uno de
los motores que llevaron al ITESM a crear la universidad virtual. Este concepto funciona en
_____________________________________________________________________________ 4
Capítulo 1. Introducción
el ámbito teórico conceptual, sin embargo, a la fecha no se ofrecen cursos prácticos en línea
para que el estudiante interactúe con un proceso industrial.
Bajo el concepto del Laboratorio Virtual el alumno está en contacto con estudiantes de
universidades en el extranjero para resolver un problema común. Dicho problema comienza
al modelar ya sea con Grafcet o con redes de Petri el sistema de manufactura asignado, una
vez que se ha conseguido el modelo es necesario validarlo aplicando la teoría de estabilidad
para sistemas modelados con redes de Petri y simularlo. La simulación puede ser hecha con
simuladores genéricos o con el simulador desarrollado para éste proyecto. Finalmente la
implementación se realiza con herramientas como actuadores neumáticos, PLCs y software
de visualización y control industrial.
Entre las ventajas de ésta propuesta se pueden mencionar:
•
El estudiante puede aplicar sus conocimientos teóricos en la práctica aún desde una
localidad remota.
•
El estudiante tiene la oportunidad de intercambiar y aplicar ideas para la solución de
problemas con estudiantes de otras universidades, aún cuando éstas se encuentren en
continentes diferentes.
•
El estudiante está más motivado a aprender nuevas lenguas que le permitan interactuar
de manera más natural con estudiantes de otros países.
•
El estudiante puede intercambiar aspectos culturales de su país al relacionarse con
otros estudiantes por un período considerable de tiempo a la vez que resuelven el
problema del experimento asignado.
•
El estudiante realiza la implementación de manera más rápida y efectiva al contar con
un modelo valido con Grafcet o redes de Petri.
•
El estudiante verifica y corrige errores oportunamente mediante la simulación del
proceso.
•
El profesor puede difundir sus conocimientos a mayor distancia, así como aprender o
compartir técnicas didácticas con profesores de otras universidades.
_____________________________________________________________________________ 5
Capítulo 1. Introducción
1.4.
OBJETIVO
El presente trabajo tiene como objetivo diseñar un Laboratorio Virtual y construir un
experimento que simule un proceso industrial controlado y visualizado desde Internet.
Dicho proceso será modelado con redes de Petri.
1.5.
JUSTIFICACIÓN
Este proyecto surge de la inquietud de dotar a los estudiantes de ingeniería o postgrado, con
una herramienta que les permita poner en práctica desde su hogar o una localidad remota el
conocimiento adquirido en las aulas.
Este trabajo se realiza en coordinación con la universidad alemana Esslingen University of
Applied Sciences. Lo anterior permitirá un intercambio de ideas y experiencias a través de
la red toda vez que los alumnos del Campus tendrán acceso a los experimentos por ellos
propuestos y viceversa.
Otra de las razones por las que se concibió este proyecto es porque los alumnos que
estudian a través de la universidad virtual carecen de talleres prácticos en línea. Aquí se
proponen algunos procesos para que el alumno pueda controlar y aportar soluciones
creativas.
Entre las principales aportaciones de este proyecto están:
•
La construcción de un Laboratorio Virtual que fomenta la colaboración entre distintas
universidades.
•
Presenta una metodología para modelar con Grafcet, diagramas de estado y
principalmente con redes de Petri.
•
Ofrece un simulador gráfico propio para el proceso del primer experimento virtual.
•
Optimiza recursos e innova al equipo de automatización.
•
Permite adquirir habilidades técnicas de nueva generación.
•
Fomenta el intercambio de ideas y culturas.
_____________________________________________________________________________ 6
Capítulo 1. Introducción
1.6.
LIMITACIÓN Y DELIMITACIÓN
Este proyecto está delimitado a diseñar el Laboratorio Virtual y ofrecer una metodología
para modelar sistemas de manufactura con redes de Petri ordinarias y temporizadas.
Las limitaciones del proyecto son:
1) Las sesiones de práctica del estudiante están limitadas por el número de PLCs
conectados en línea.
2) Dichas sesiones están afectadas por los retardos de Internet que se generan por la carga
de la red.
3) En este momento sólo se cuenta con un experimento así que cada grupo de trabajo
tiene un tiempo asignado para su sesión de entrenamiento.
4) El simulador de proceso desarrollado sólo puede simular el experimento actual.
1.7.
ORGANIZACIÓN DE LA TESIS
En el capítulo uno se ofrece un marco introductorio y de referencia en el cual se explica el
problema del Laboratorio Virtual, presenta un panorama de trabajos relacionados, se dan
los objetivos, la justificación y se delimita el trabajo de tesis.
En el capítulo dos se explica la teoría necesaria para comprender el proceso de modelado
con redes de Petri. Se divide en tres secciones: Sistemas de eventos discretos, Introducción
a las redes de Petri y Análisis de estabilidad, control y regulación para sistemas modelados
con RdP.
En el capítulo tres se presenta la metodología propuesta para modelado y simulación de
sistemas de manufactura utilizando redes de Petri. Se explica dicha metodología utilizando
un ejemplo sencillo resuelto paso a paso hasta obtener el modelo en redes de Petri a partir
del sistema físico.
En el capítulo cuatro se exponen las pruebas realizadas sobre el Laboratorio Virtual y se
muestran los resultados obtenidos como son: modelado del experimento del Laboratorio
_____________________________________________________________________________ 7
Capítulo 1. Introducción
utilizando Grafcet, modelado del experimento utilizando redes de Petri, la implementación
de éste último modelo, la interfase gráfica de control y visualización con WinCC y la
visualización del proceso con una cámara de red.
En el capítulo cinco se brindan las conclusiones del trabajo, las aportaciones del mismo y se
enlistan algunas ideas de trabajo a futuro que puede seguir a partir de esta tesis.
_____________________________________________________________________________ 8
Capítulo 1. Introducción
CAPÍTULO 2
MARCO TEÓRICO
2.1. INTRODUCCIÓN
En este capítulo se explica la teoría necesaria para comprender el proceso de modelado
con redes de Petri expuesto en el capítulo tres. Así mismo se ofrecen técnicas como
estabilidad y regulación que permiten crear un modelo libre de errores.
Las Redes de Petri (RdP), son una herramienta que sirve para modelar sistemas. El
modelo obtenido ofrece información acerca de la estructura y comportamiento dinámico
del sistema. Esta información puede ser utilizada para evaluar, sugerir cambios o mejoras
y para validar el sistema.
2.2. SISTEMAS DE EVENTOS DISCRETOS
Los sistemas de eventos discretos (DES) son aquellos que están compuestos por
elementos que manejan entidades discretas, es decir numerables y diferenciables entre sí
[17]. Su funcionamiento está caracterizado por una sucesión finita o infinita de estados
estables delimitados por eventos que ocurren, generalmente, de manera asíncrona.
La mayor parte de los DES han sido construidos por el hombre; como ejemplo se pueden
citar los sistemas de cómputo y los sistemas de producción discretos conocidos también
como sistemas de manufactura.
En lo que se refiere al diseño y construcción de sistemas de eventos discretos, el
modelado constituye una etapa importante. Las pruebas efectuadas sobre el modelo
(validación), las cuales incluyen la simulación y pruebas formales, permiten detectar
problemas de diseño debidos generalmente a: especificaciones incompletas, ambiguas y a
veces erróneas (o irrealizables). La aplicación iterada de pruebas y ajustes conducen a un
modelo cuya implementación será confiable.
_____________________________________________________________________
9
Capítulo 2. Marco Teórico
2.3. INTRODUCCIÓN A LAS REDES DE PETRI
A continuación se presentan los conceptos básicos de las redes de Petri [18]. Se ofrecen
las nociones fundamentales de la teoría de RdP y su aplicación al modelado de sistemas
de eventos discretos [25].
2.3.1. Estructura de redes de Petri
Una RdP C, es una cuadrupleta:
C = (P,T,I,O)
(2.1)
donde:
P = {p1 ,..., pn } es un número finito de plazas, n ≥ 0 .
(2.2)
T = {t1 ,..., t m } es un número finito de transiciones, m ≥ 0 .
(2.3)
Los multiconjuntos de plazas y transiciones son disjuntos: P ∩ T = Φ .
I : T → P ∞ es la función de entrada.
(2.4)
O : T → P ∞ es la función de salida.
(2.5)
DEFINICIÓN
Un lugar pi es una plaza de entrada a una transición t j ⇔ pi ∈ I (t j ) . Un lugar pi es una
plaza de salida de la transición t j ⇔ pi ∈ O(t j ) .
DEFINICIÓN
La multiplicidad de un lugar de entrada pi para una transición tj es el número de
ocurrencias de pi en I (t j ) , lo cual es igual a # ( pi , I (t j )) .
De forma similar la multiplicidad de un lugar de salida pi para una transición tj es el
número de ocurrencias de pi en O(t j ) , lo cual es igual a # ( pi , O(t j )) .
DEFINICIÓN
Las funciones de entrada (2.4) y salida (2.5) se extienden de la siguiente manera:
_____________________________________________________________________ 10
Capítulo 2. Marco Teórico
I : P →T∞
# (t j , I ( pi )) = # ( pi , O(t j ))
(2.6)
O: P →T∞
# (t j , O( pi )) = # ( pi , I (t j ))
(2.7)
2.3.2. Gráficas de redes de Petri
DEFINICIÓN
Una gráfica de RdP G, es una multigráfica bipartita
G = (V , A)
(2.8)
Donde:
V = {v1 , v2 ,..., vs } es el multiconjunto de nodos (vértices)
(2.9)
A = {a1 , a2 ,..., ar } es un multiconjunto de arcos dirigidos a j = (v j , vk )
con v j , vk ∈ V .
(2.10)
El multiconjunto V puede ser partido en dos multiconjuntos distintos P y T, tal que
V = P ∪ T ; P ∩ T = Φ y para cada arco dirigido ai ∈ A si a j = (v j , vk ) entonces v j ∈ P
y vk ∈ T o v j ∈ T y vk ∈ P .
Nota: Una estructura de RdP consiste de plazas y transiciones, por lo tanto se tienen dos
clases de vértices (nodos). Un círculo representa un a plaza y una línea una transición.
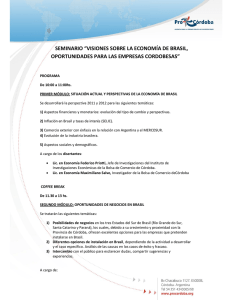
Ejemplo 2.1. Dibujar la gráfica de la red de Petri que se da a continuación:
C = ( P, T , I , O )
P = {p1 ,..., p3 }
T = {t1 ,...,t3 }
_____________________________________________________________________ 11
Capítulo 2. Marco Teórico
I (t1 ) = {p1}
O(t1 ) = {p1 , p2 }
I (t 2 ) = {p1 }
O(t 2 ) = {p2 , p3 }
I (t3 ) = {p2 , p3 }
O(t3 ) = {p3 }
Entonces la gráfica de la RdP anterior es:
Figura 2.1. Gráfica de la RdP.
Donde las tres plazas se dibujaron como círculos, las tres transiciones como líneas, los
arcos están definidos por las funciones de entrada y salida.
2.3.3. Marcajes de redes de petri
Un marcaje µ es una asignación de “marcas” a las plazas de la Red de Petri.
DEFINICIÓN
Un marcaje µ en una RdP C = ( P, T , I , O) es una función µ : P → Ν ( Ν = Naturales).
El marcaje también se define como un vector µ
µ = ( µ1 , µ 2 ,..., µ n )
(2.11)
con n =| P | y cada µ i ∈ Ν , es decir, µ = Ν m con µ i el número de marcas de la i-ésima
plaza. El marcaje inicial µ 0 es el marcaje original del sistema.
_____________________________________________________________________ 12
Capítulo 2. Marco Teórico
DEFINICIÓN
Una RdP con marca M = (C , µ ) es una red de Petri C = ( P, T , I , O) y un marcaje
µ : P → Ν que también suele denotarse por:
M = ( P, T , I , O, µ )
(2.12)
2.3.4. Reglas de ejecución para las redes de Petri
La ejecución de una RdP está controlada por el número y distribución de las marcas en la
red. Las marcas residen en las plazas y controlan la ejecución de las transiciones. Una
RdP se ejecuta disparando transiciones, lo cual significa remover marcas de las plazas de
entrada a la transición y creando nuevas marcas (distribuidas) en las plazas de salida. Las
transiciones solo pueden ser disparadas si están habilitadas.
DEFINICIÓN
Una transición t j ∈ T en una RdP con marca M = ( P, µ ) está habilitada si ∀pi ∈ I (t j )
µ ( pi ) ≥ # ( pi , I (t j ))
(2.13)
Una transición se dispara removiendo todas las marcas habilitadas de sus plazas de
entrada y depositando en cada una de sus plazas de salida una marca por cada arco de la
transición a la plaza.
DEFINICIÓN
Una transición tj en una RdP con marca M = (C , µ ) se dispara cuando tj esta habilitada.
Si tj es disparada, esto resulta en un nuevo marcaje definido por µ ' :
µ ' ( pi ) = µ ( pi ) − # ( pi , I (t j )) + # ( pi , O(t j ))
(2.14)
_____________________________________________________________________ 13
Capítulo 2. Marco Teórico
2.3.5. Espacio de estados de redes de Petri
Definiciones:
i)
El estado de una RdP está definido por su marcaje.
ii)
El espacio de estados de una red de Petri con m plazas es el conjunto de todas
las posibles marcas Ν m .
DEFINICIÓN
La función “Próximo estado” δ : Ν m × T → Ν m para una RdP C = ( P, T , I , O) con marca
µ y transición t j ∈ T está definida si y sólo si se cumple (2.13), y si δ ( µ , t j ) esta
definida, entonces δ ( µ , t j ) = µ ' , donde µ ' es igual a (2.14)
DEFINICIÓN
Para una RdP C = ( P, T , I , O) con marcaje µ , un marcaje µ ' es “inmediatamente
alcanzable” desde µ si existe una transición t j ∈ T tal que δ ( µ , t j ) = µ ' .
DEFINICIÓN
El conjunto de “alcanzabilidad” R(C , µ ) de una RdP C = ( P, T , I , O) con marca µ es el
“más pequeño” conjunto de marcas definido por:
1. µ ∈ R(C , µ )
2. Si µ '∈ R(C , µ ) y µ ' ' = δ ( µ ' , t j ) para alguna t j ∈ T ⇒ µ ' '∈ R(C , µ )
DEFINICIÓN
La “función extendida de próximo estado” está definida para un marcaje µ y una
sucesión de transiciones σ ∈ T como:
δ ( µ , t j , σ ) = δ (δ ( µ , t j ), σ )
(2.15)
_____________________________________________________________________ 14
Capítulo 2. Marco Teórico
2.3.6. Propiedades de las redes de Petri
2.3.6.1. Seguridad
Una plaza pi ∈ P de una RdP C = ( P, T , I , O) con un marcaje inicial µ es segura si
∀µ '∈ R(C , µ ), µ ' ( pi ) ≤ 1 . Una RdP se dice ser segura si cada plaza en la red es segura.
2.3.6.2. Acotamiento
Una plaza pi ∈ P de una RdP C = ( P, T , I , O) con un marcaje inicial µ es k-segura o kacotada si ∀µ '∈ R(C , µ ) existe µ ' ( pi ) ≤ k .
2.3.6.3. Conservación
Una red de Petri
con marcaje inicial µ es "estrictamente"
C = ( P, T , I , O )
conservativa si ∀µ '∈ R(C , µ ) tiene:
∑ µ( p ) = ∑ µ' ( p )
i
pi ∈P
(2.16)
i
pi ∈P
Nota: En términos de las funciones de entrada y salida se tiene que:
| I (t j ) |=| O(t j ) | ∀t j ∈ T
(2.17)
DEFINICIÓN
Una red de Petri C = ( P, T , I , O) con marcaje inicial µ se dice ser conservativa
"con respecto a un vector de peso ω " si ∀µ '∈ R(C , µ )
∑ω µ( p ) = ∑ω µ' ( p )
i
i
i
i
i
(2.18)
i
2.3.6.4. Vivacidad
i)
Un bloqueo en una RdP es una transición (o una sucesión de transiciones) que no
puede(n) ser disparadas.
_____________________________________________________________________ 15
Capítulo 2. Marco Teórico
ii)
Una RdP esta viva si no esta bloqueada.
2.3.6.5. Alcanzabilidad
Dada una red de Petri C = ( P, T , I , O) con marcaje µ , se dice que µ ' es alcanzable si
µ '∈ R(C , µ ) .
2.3.7. Técnicas de análisis
2.3.7.1. Árbol de alcanzabilidad
Se trata de obtener una representación finita de todas las posibles sucesiones de disparo
de transición.
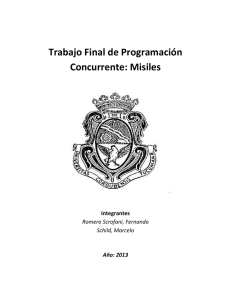
Ejemplo 2.2. A continuación se obtendrá el árbol de alcanzabilidad de la gráfica de la
RdP del ejemplo 2.1 considerando que el marcaje inicial es µ 0 = {1,0,0} .
Figura 2.2. Gráfica de RdP.
Figura 2.3. Árbol de alcanzabilidad.
2.3.7.2. Métodos matriciales
Otra alternativa consiste en definir la RdP de la siguiente forma:
Una RdP consiste en la cuatrupleta ( P, T , A+ , A− ) donde P y T son multiconjuntos de
plazas y transiciones con:
A− ( j , i ) = # ( pi , I (t j ))
Entradas a las transiciones
(2.19)
_____________________________________________________________________ 16
Capítulo 2. Marco Teórico
A + ( j , i ) =# ( pi , O(t j ))
Salidas a las transiciones
(2.20)
son matrices de m renglones (| T |= m) y n columnas (| P |= n) . (Evidentemente el
proporcionar estas matrices es equivalente a dar I : T → P ∞ y O : T → P ∞ , ya que por
medio de A+ y A− se puede construir O e I respectivamente y viceversa), la ventaja de
esta definición es que ahora es posible rescribir todo en forma matricial.
∆
Sea e[ j ] = (0,...,0,1,0,...,0) entonces t j = e[ j ]lxm . Ahora suponiendo que tj esta habilitada
−
con un marcaje µ , i.e., µ lxm ≥ e[ j ]lxm Amxn
y como resultado de disparar tj en el marcaje
µ , el nuevo marcaje µ ' es:
δ ( µ , t j ) = µ − e[ j ] A− + e[ j ] A+
= µ + e[ j ](− A− + A+ )
= µ + e[ j ] A
(2.21)
donde:
A = A+ − A−
(2.22)
Ahora en el caso de tener una sucesión de disparos
σ = t j , t j ,..., t j
1
2
k
entonces:
δ ( µ , σ ) = µ + e[ j1 ] A + e[ j2 ] A + ... + e[ jk ] A
= µ + (e[ j1 ] + e[ j2 ] + ... + e[ jk ]) A
= µ + f (σ ) A
(2.23)
_____________________________________________________________________ 17
Capítulo 2. Marco Teórico
donde: f (σ ) = e[ j1 ] + e[ j2 ] + ... + e[ jk ] es llamado "Vector de disparo" de la sucesión
σ = t j , t j ,..., t j . El i-esimo elemento de f (σ ) , f (σ ) i denota el número de veces que la
1
2
k
transición ti ha sido disparada en la sucesión σ = t j1 , t j2 ,..., t jk .
2.3.8. Redes de Petri temporizadas
2.3.8.1. Inclusión del tiempo en un modelo de RdP
La inclusión del tiempo en una RdP puede ser hecha asignando tiempos a las transiciones
o a los lugares. El nombre que recibe una RdP con restricciones temporales es red de
Petri temporizada (RPT) [17]. En general, el tiempo puede ser asignado a los lugares, a
las transiciones, o a ambos; sin embargo el tratamiento de los modelos en RPT se ve
simplificado cuando se temporiza un solo tipo de nodo.
2.3.8.2. RdP con transiciones temporizadas
Una RPT a la cual el tiempo esta asociado a las transiciones se le llama RdP con
transiciones temporizadas (RPTT).
Una RPTT se define como: (C, D, Γ ) donde:
•
C es una RdP ordinaria
•
D (D ={di}; i = l,...,n) es un conjunto de retardos (o duraciones) asociados a
transiciones
•
Γ un conjunto ordenado cuyos elementos ( tj, τ k ) ∈ ( T × R + ) representan el instante
de disparo de una transición.
Una RdP es un caso especial de una RPTT donde cada di = 0. En esta convención el
retardo dj ligado a una transición tj indica la duración del disparo de ésta.
Además el árbol de alcanzabilidad de una red de Petri plaza-transición es un conjunto del
árbol de alcanzabilidad de una RPT, porque en el mejor de los casos todas las
transiciones de la RPT son disparadas.
_____________________________________________________________________ 18
Capítulo 2. Marco Teórico
2.4. ESTABILIDAD, CONTROL Y REGULACIÓN
En ésta sección se presenta el problema de estabilidad y regulación de sistemas de
eventos discretos modelados con redes de Petri usando la teoría de funciones de
Lyapunov. Primero se darán algunas caracterizaciones matemáticas que garanticen la
estabilidad y regulación [16]
Proposición. Sea PN una red de Petri. PN es uniforme y prácticamente estable si existe
un m vector estrictamente positivo φ tal que
∆v = u T Aφ ≤ 0
(2.24)
Para su demostración ver [16]
Lema. Suponiendo que la ecuación (2.24) se cumple, entonces
∆v = u T Aφ ≤ 0 ⇔ Aφ ≤ 0
(2.25)
Definición. Sea PN una red de Petri. PN puede estabilizarse si existe una secuencia de
disparo de transición con un vector de conteo de transición u tal que la siguiente ecuación
se satisface
∆v = AT u ≤ 0
(2.26)
Comentario 1. Es importante mencionar que escogiendo un vector u particular, que
satisfaga (2.26) el árbol de alcanzabilidad se restringe a las marcas finitas de u. Ésta
técnica puede utilizarse para obtener algunos vectores u de regulación y quitar algunos
eventos no deseados.
_____________________________________________________________________ 19
Capítulo 2. Marco Teórico
CAPÍTULO 3
METODOLOGÍA
3.1. INTRODUCCIÓN
El laboratorio virtual tiene como primer experimento un sistema posicionador de piezas
neumático. El problema es tradicionalmente resuelto utilizando herramientas como Grafcet
o diagramas de estado que permiten llevar un seguimiento secuencial del proceso. En este
capítulo se describe la metodología para modelar y simular sistemas de manufactura
utilizando la teoría de redes de Petri descrita en el capítulo dos.
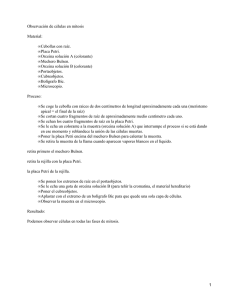
3.2. DIAGRAMA DE FLUJO DE LA METODOLOGÍA
El proceso metodológico puede resumirse en el siguiente diagrama de flujo.
Figura 3.1. Diagrama de flujo.
______________________________________________________________________ 20
Capítulo 3. Metodología
3.3. METODOLOGÍA
Con el fin de facilitar la comprensión del modelado con redes de Petri, se partirá de un
ejemplo sencillo en el cual se sigue la metodología propuesta en el diagrama de flujo para
así obtener la RdP a partir de un problema físico.
3.3.1. Definición del problema
Consiste en explicar la forma en que evoluciona el sistema elegido, es decir, mencionar
bajo que condiciones se acciona cada actuador para ejecutar un ciclo de operación
completo. Es aconsejable asignarle a cada actuador, sensor, etc. un nombre o sigla para
identificarlo. A continuación se define el problema para el ejemplo auxiliar (en adelante se
hará referencia a éste como ejemplo 3.1)
El sistema está compuesto de dos vagones que se desplazan sobre vías independientes por
la acción de las señales Di (Movimiento a la derecha) e Ii (Movimiento a la izquierda) con
i=1,2. Las posiciones de los extremos se detectan por los sensores a, b, c y d. Un botón M
sirve para iniciar la operación del sistema desde su posición inicial (vagones en reposo a la
izquierda): cuando se oprime ambos vagones parten hacia la derecha; al llegar éstos a su
extremo derecho deben regresar y detenerse al alcanzar la posición inicial. Solo se puede
comenzar un nuevo ciclo cuando los dos vagones estén en la posición inicial. Las
velocidades de los vagones pueden ser cualesquiera.
3.3.2. Diagrama técnico
Una vez que se ha planteado el problema se puede obtener el diagrama técnico del sistema.
En el diagrama técnico se realiza una representación grafica del proceso que permita
comprender de manera visual el funcionamiento dado en la definición del problema.
Es aconsejable dibujar los actuadores, sensores y acciones e identificarlos con el nombre o
sigla previamente asignada. El diagrama técnico del ejemplo 3.1 se ilustra en la figura 3.2.
______________________________________________________________________ 21
Capítulo 3. Metodología
Figura 3.2. Diagrama técnico del sistema.
3.3.3. Diagrama de estados
El diagrama de estados se obtiene dibujando un círculo por cada estado y un arco para cada
transición. Los estados representan acciones y las transiciones representan condiciones.
Dentro de cada círculo se escribe un número que identifica al estado, el estado inicial se
indica con el número más pequeño. Las acciones de los estados se escriben fuera del circulo
utilizando la nomenclatura del diagrama técnico y las condiciones de las transiciones se
escriben al lado de la flecha de los arcos.
Dibujar el diagrama de estados en este caso es opcional pues ocurren múltiples ocurrencias
y solo se incluye como parámetro de comparación entre el diagrama de estados y la red de
Petri. La figura 3.3. muestra el diagrama de estados reducido del ejemplo 3.1.
En el diagrama de estados simplificado se obtienen nueve estados y veintiún transiciones.
Si se utiliza una tabla de estados se tendrían que considerar 25 posibles combinaciones de
los sensores.
La figura 3.3. Diagrama de estados del sistema.
______________________________________________________________________ 22
Capítulo 3. Metodología
3.3.4. Reglas de ejecución
Los sistemas de producción fueron desarrollados por Newell y Simon para su modelo de
cognición humana [19]. Los sistemas de producción son esquemas de representación
modular del conocimiento, encontrados principalmente en aplicaciones de inteligencia
artificial. La idea básica de estos sistemas está en que el conocimiento se presenta en forma
de reglas de producción (reglas de ejecución) con el formato de pares condición-acción: “
Si tal condición (o premisa, o antecedente) se cumple, Entonces alguna acción ocurre (o
resultado, o colusión, o consecuencia). Por ejemplo:
Si la luz del semáforo está en verde
Y el auto de adelante avanza
Entonces avanza tu también.
Para el ejemplo 3.1. las reglas de ejecución son las siguientes:
1. Si ambos vagones están detenidos en la izquierda (a,c implica sincronización)
Y se presiona el botón M
Entonces mover los vagones a la derecha (D1,D2)
2. Si el vagón 1 llega a la derecha (b)
Entonces mover vagón 1 a la izquierda (I1)
3. Si el vagón 2 llega a la derecha (d)
Entonces mover vagón 2 a la izquierda (I2)
4. Si el vagón 1 llega a la izquierda (a)
Entones detenerse
5. Si el vagón 2 llega a la izquierda (c)
Entonces detenerse
______________________________________________________________________ 23
Capítulo 3. Metodología
3.3.5. Definición de plazas y transiciones
Una plaza es un lugar físico dentro del sistema, (i.e. una banda transportadora, las vías de
un montacargas, una pila de piezas, el montacargas moviéndose sobre un tramo
determinado – en cuyo caso la plaza seria el tramo de vías sobre el que se mueve -, etc.) las
transiciones son eventos o resultados de esos eventos (acciones) que ejecuta el sistema (i.e.
un botón oprimido, el efecto de presionar dicho botón –moverse, detenerse-, etc.).
Formalmente las redes de Petri ordinarias o plaza-transición se definen en la ecuación (2.1).
En el mismo apartado 3.2.1. se ofrecen definiciones importantes sobre la interacción entre
plazas y las transiciones mediante funciones de entrada y salida.
Para el ejemplo 3.1 es necesario definir las plazas y transiciones de la red de Petri. Observar
que en este caso las plazas corresponden a las posiciones de los vagones y las transiciones a
eventos que permiten la evolución de las marcas en las plazas.
•
Definición de plazas
P1: Vagón 1 en reposo.
P2: Vagón 1 moviéndose a la derecha.
P3: Vagón 1 moviéndose a la izquierda.
P4: Vagón 2 en reposo
P5: Vagón 2 moviéndose a la derecha.
P6: Vagón 2 moviéndose a la izquierda.
•
Definición de transiciones
T1: Botón M presionado
T2: Detector b oprimido
T3: Detector a oprimido
T4: Detector d oprimido
T5: Detector c oprimido
3.3.6. Asignación de marcas
Las marcas son puntitos que se colocan dentro las plazas y corresponden a los recursos del
sistema (i.e. en un montacargas sobre las vías, la plaza son las vías y el montacargas es la
______________________________________________________________________ 24
Capítulo 3. Metodología
marca -recurso-, es decir, un puntito dentro de la plaza vías). El marcaje es la asignación de
marcas a las plazas, formalmente definido por (2.11).
En este momento se conocen las plazas y las transiciones del ejemplo 3.1, también se les ha
dado un significado físico (basándose en las reglas de ejecución), pero falta asignar las
marcas. Físicamente existen dos vagones, estos son los recursos del sistema y en redes de
Petri cada uno equivale a una marca colocada originalmente en las plazas P1 y P4
respectivamente. Entonces el marcaje inicial es µ 0 = (1,0,0,1,0,0)
3.3.7. Gráfica de la red de Petri
Una gráfica de RdP es una representación de una estructura de una RdP como una
multigráfica dirigida bipartita, definida en (2.8). Para dibujarla se toman las siguientes
consideraciones: Un círculo representa una plaza, una línea una transición, una flecha un
arco. Las plazas contienen a las marcas que se dibujan solamente en la posición inicial, los
arcos van de plazas a transiciones, o de transiciones a plazas, pero nunca de plazas a plazas
o transiciones a transiciones.
Ahora es posible dibujar la gráfica de la red de Petri para el ejemplo 3.1. Primero se dibujan
seis círculos (correspondientes a cada plaza) y cinco líneas (aquí se dibujaron verticales
pero pueden estar en cualquier orientación). Los arcos se dibujan siguiendo el flujo del
problema, por ejemplo: la transición uno modela el problema de sincronización (ambos
vagones -marcas- deben estar en reposo –plazas uno y cuatro- para que dicha transición se
habilite, T1 se dispara si esta habilitada y se presiona el botón M ), las demás transiciones se
habilitan cuando su respectiva marca esta en la plaza de entrada y se disparan cuando se
satisface la condición de sensado.
Figura 3.4. Gráfica de la red de Petri del sistema.
______________________________________________________________________ 25
Capítulo 3. Metodología
3.3.8. Análisis de estabilidad
Se comprueba mediante el análisis de estabilidad práctica para sistemas de eventos
discretos modelados con redes de Petri usando la teoría de funciones de Lyapunov (ver
sección 2.4). Éste tipo de análisis como su nombre lo indica es práctico y entre los aspectos
más importantes que revisa están: que no se creen ni destruyan recursos (marcas), que los
estados sean alcanzables, que el sistema no sufra bloqueo y para determinar los vectores de
disparo f (σ ) válidos.
Para el ejemplo 3.1 primero se obtiene la matriz de incidencias utilizando la ecuación
(2.22), A = A+ − A− . Después se tiene que satisfacer la implicación de la ecuación (2.25)
Aφ ≤ 0 , donde φ es un vector estrictamente positivo.
1
0 −1 1
0 0
− 1 1
0 −1 1
1 0
0
0
0
1
Aφ = 1
0 −1 0
0
0 = 0
1
−
0
0
0
0
1
1
1 0
0
0
0 1
0 − 1 0
1
Como la ecuación (2.25) se satisface, es decir Aφ = 0 , entonces el sistema es uniforme y
prácticamente estable.
3.3.9. Control y regulación
Mediante el análisis de control y regulación se pueden determinar los vectores de disparo
f (σ ) validos en el sistema. Además se puede observar que transiciones se disparan y
cuales no.
Para realizar el análisis de control y regulación se debe satisfacer la ecuación (2.26)
AT u ≤ 0 , donde u es un vector perteneciente al espacio nulo de la matriz AT.
______________________________________________________________________ 26
Capítulo 3. Metodología
Calculando u para el ejemplo 3.1 se tiene que:
k
k
k
u =
k
k
k
El vector u resultante satisface (2.26), es decir AT u = 0 y significa que el sistema es
completamente controlable y regulable, físicamente quiere decir que todas las transiciones
pueden ser disparadas k veces. Desde el punto de vista de vector de disparo se tiene que
f (σ ) = {k , k , k , k , k , k} donde σ = {t1 , t 2 , t3 , t 4 , t5 , t 6 } .
3.3.10. Simulación
Para verificar que la red de Petri sea viva se pueden utilizar simuladores de redes de Petri,
estos se encuentran en Internet.
Este ejemplo fue simulado satisfactoriamente utilizando HPSIM V1.1 [20]. Como no sufrió
bloqueo el sistema es vivo.
3.3.11. Redes de Petri temporizadas
Un caso particular de las redes de Petri son las RPT, dichas redes fueron descritas en el
capítulo dos. A continuación se extiende el ejemplo 3.1 al caso de RPTT.
Primero se obtiene el árbol de alcanzabilidad del sistema como apoyo (ver figura 3.5).
Figura 3.5. Árbol de alcanzabilidad.
______________________________________________________________________ 27
Capítulo 3. Metodología
Ahora, si se toma el vector d = {0,4,4,5,5} se tiene la sucesión de disparo resaltada en el
árbol σ = {t1 , t 2 , t 4 , t3 , t5 } . Se supondrá que τ 1 = 0 , es decir, la transición t1 se dispara en
cuanto se presione M. Para comprender la evolución del marcaje se dibuja un diagrama de
tiempos.
Figura 3.6. Diagrama de tiempos.
Lo que genera el vector ϕ = {(t1 ,0), (t 2 ,0), (t 4 ,0), (t3 ,4), (t5 ,5)}
______________________________________________________________________ 28
Capítulo 3. Metodología
CAPÍTULO 4
PRUEBAS Y RESULTADOS
4.1. PRUEBAS
Entre las pruebas aplicadas al sistema se encuentran las siguientes:
•
Validación del modelo de RdP del sistema.
•
Tiempo de respuesta del programa WinCC.
•
Tiempos de acceso dentro del Campus.
•
Tiempos de acceso fuera del Campus.
•
Pruebas del Laboratorio Virtual en equipos de trabajo.
A continuación se detalla cada una de las pruebas que fueron realizadas diariamente a lo
largo de una semana.
4.1.1. Validación del modelo de RdP del Sistema.
El modelo se puede verificar simulándolo y comprobando sus propiedades. La simulación
ya fue descrita en la sección 3.5.8. y se comprobó que el sistema era vivo. Estabilidad y
regulación se comprobaron en 3.5.9 y 3.5.10.
4.1.2. Tiempo de respuesta del programa WinCC.
El programa WinCC tiene diferentes tiempos de respuesta para entrada y salida de datos y
estos se resumen en la tabla 4.1.
Operación
Salida de datos
Entrada de datos
Tiempo
En tiempo real
1.5 seg
Tabla 4.1. Tiempo de respuesta de WinCC.
4.1.3. Tiempos de acceso dentro del Campus.
En la tabla 4.2. se resumen los tiempos de acceso al servidor de VNC y el retardo de la
pantalla mostrada con respecto a los cambios reales de acuerdo a la hora del día.
_____________________________________________________________________ 29
Capítulo 4. Pruebas y resultados
Hora
Tiempo (seg) Retardo (seg)
8:00
20
2
9:00
23
2
10:00
20
2
11:00
30
3
12:00
50
3
13:00
54
3
14:00
52
3
15:00
47
3
16:00
50
3
17:00
49
3
18:00
30
2
19:00
20
2
20:00
20
2
Tabla 4.2. Tiempo de acceso al servidor de VNC.
En la tabla 4.3. se resumen los tiempos de acceso y el retardo para recibir la imagen de la
cámara de red de acuerdo a la hora del día.
Hora
Tiempo (seg) Retardo (seg)
8:00
3
0.5
9:00
3
0.5
10:00
4
1
11:00
4
1
12:00
7
2
13:00
6
2
14:00
8
2
15:00
8
3
16:00
7
3
17:00
8
2
_____________________________________________________________________ 30
Capítulo 4. Pruebas y resultados
18:00
4
2
19:00
4
1
20:00
3
1
Tabla 4.3. Tiempo de acceso a la cámara de red.
4.1.4. Tiempos de acceso fuera del Campus.
En la tabla 4.4. se resumen los tiempos de acceso al servidor de VNC y el retardo de la
pantalla mostrada con respecto a los cambios reales de acuerdo al lugar desde donde se
accede.
Lugar
Tiempo (seg)
Retardo (seg)
Toluca
20-30
3-6
Alemania
50-90
3-10
Distrito Federal
30-40
3-8
Tabla 4.4. Tiempo de acceso al servidor de VNC.
En la tabla 4.5. se resumen los tiempos de acceso a la cámara de red y el retardo para
recibir la imagen de acuerdo al lugar desde donde se accede.
Lugar
Tiempo (seg)
Retardo (seg)
Toluca
5-10
3-10
Alemania
10-20
5-20
Distrito Federal
5-10
5-15
Tabla 4.5. Tiempo de acceso al servidor de VNC.
4.1.5. Pruebas del Laboratorio Virtual en equipos de trabajo.
La metodología ofrecida para que el estudiante desarrolle el experimento propuesto en esta
tesis es la siguiente:
1.
Organizar grupos de trabajo constituidos por estudiantes del ITESM Campus Toluca y
estudiantes de la Universidad de Ciencias Aplicadas de Esslingen. Se propone que los
_____________________________________________________________________ 31
Capítulo 4. Pruebas y resultados
equipos de trabajo cuenten como máximo con cuatro integrantes de los cuales dos
serán mexicanos y dos serán alemanes.
2.
Una vez organizados los grupos de trabajo se asignarán las tareas a desarrollar por
cada uno de ellos, entre las posibles tareas están:
•
Modelar y validar el sistema de manufactura utilizando la herramienta apropiada
según sea el objetivo de la práctica.
3.
•
Implementar el modelo obtenido en un PLC utilizando para ello el programa VNC.
•
Desarrollar la interfase gráfica correspondiente utilizando WinCC.
Ya que se han cumplido las tareas anteriormente propuestas es tiempo de realizar
pruebas para lo cual la coordinación entre ambos bandos es imprescindible.
4.
La comunicación entre ambos bandos se realiza con herramientas comerciales como
Yahoo Messenger o correo electrónico.
Se probó la metodología con un grupo de estudiantes tanto mexicanos como alemanes
obteniendo resultados satisfactorios en cuanto a tiempos de acceso, organización de grupo,
manejo de liderazgo y realización en el tiempo propuesto de las tareas asignadas para cada
estudiante.
El sistema fue probado dentro y fuera del Campus. Tanto estudiantes como personal
académico del ITESM Campus Toluca y la Universidad de Ciencias Aplicadas de
Esslingen pudieron firmarse en el servidor del proyecto, enviar los parámetros requeridos,
correr, simular y controlar el experimento de manera satisfactoria.
La limitación del proyecto es que actualmente solo se cuenta con un experimento y los
equipos de trabajo tienen que esperar su turno para la sesión asignada, que además esta
limitada en tiempo. Lo anterior no seria tan critico de no presentarse los retardos por carga
en la red que ocasionan tiempos de acceso muy lentos.
_____________________________________________________________________ 32
Capítulo 4. Pruebas y resultados
Otra limitante encontrada fue en cuanto a que los horarios de trabajo entre ambas
universidades están desfasados entre si.
Entonces el intervalo de tiempo real entre
universidades es de seis horas y se muestra en la tabla 4.6.
Inicio común de actividades
Fín común de actividades
(hora local)
(hora local)
ITESM
7:00 A.M.
12:00 P.M.
FHTE
12:00 P.M
18:00 P.M.
Tabla 4.6. Horario de actividades.
La comunicación entre estudiantes de ambas universidades se dio exitosamente utilizando
herramientas comerciales como correo electrónico o el mensajero de Yahoo. No es
necesario desarrollar herramientas propias para este tipo de comunicación pues las antes
mencionadas funcionan adecuada y eficazmente para intercambio de mensajes, imágenes y
archivos.
4.2. RESULTADOS
4.2.1. Experimento virtual, la forma tradicional
El experimento virtual puede resolverse utilizando Grafcet si se considera como un sistema
secuencial en el cual solo ocurre un evento a la vez. En las siguientes líneas se ilustra el
proceso de modelado con Grafcet.
4.2.1.1. Definición del problema
Un disco metálico es movido a la derecha sobre una banda transportadora, al final del
recorrido cae por una rampa donde es empujado por un cilindro horizontal (posicionador),
cuando el posicionador está completamente extendido un cilindro vertical toma la pieza con
ayuda de una ventosa y se mueve a la izquierda, en donde regresa el disco a la banda
transportadora.
Solo se utiliza un disco y la banda puede permanecer siempre prendida.
_____________________________________________________________________ 33
Capítulo 4. Pruebas y resultados
4.2.1.2. Diagrama técnico
Figura 4.1. Diagrama técnico del sistema
4.2.1.3. Grafcet
El Grafcet del sistema se muestra en la figura 4.2. Se considera que la banda transportadora
siempre está prendida y solamente se utiliza un disco.
Figura 4.2. Grafcet.
La obtención Grafcet concluye el proceso de modelado para el sistema tradicional, y se
implementa utilizando máquinas de estado. La forma tradicional de solución y modelado no
implica múltiples ocurrencias, si se dibujara la red de Petri quedaría muy similar al
diagrama de estados (o al Grafcet), por está razón no se utiliza el enfoque de RdP.
_____________________________________________________________________ 34
Capítulo 4. Pruebas y resultados
4.2.2. Modelado del experimento virtual utilizando RdP
En el apartado anterior se resolvió el problema del Laboratorio Virtual utilizando Grafcet
de manera sencilla, ¿porqué utilizar entonces redes de Petri? La respuesta es por eficiencia,
el posicionador empuja la pieza hasta que el portador regresó a la derecha y esto es lento.
Realizar varios eventos al mismo tiempo reduce tiempo y optimiza los recursos, es por ello
que se plantea un modelo con redes de Petri. A continuación se resuelve el experimento
virtual utilizando la metodología propuesta para redes de Petri.
4.2.2.1. Definición del problema
Una banda transportadora mueve cilindros metálicos (piezas) de izquierda a derecha, al
llegar al final de dicha banda caen por una rampa. Desde allí son empujados pieza por pieza
por un cilindro neumático (posicionador) a la posición de home. El portador toma una pieza
usando para ello una ventosa y la coloca en la posición final como efecto del
desplazamiento a la izquierda del cilindro de accionamiento lineal. La pieza cae
deslizándose por el borde de la estructura en la banda transportadora. El ciclo se repite
mientras el sistema este encendido y en modo automático.
El sistema es capaz de manejar los siguientes procesos de manera simultanea:
•
Portador moviéndose a la izquierda o a la derecha y extender posicionador.
•
Portador moviéndose a la izquierda o a la derecha y apagar o encender la banda
transportadora.
4.2.2.2. Diagrama técnico
Figura 4.3. Vistas frontal y derecha del sistema neumático.
_____________________________________________________________________ 35
Capítulo 4. Pruebas y resultados
4.2.2.3. Diagrama de estados
Al igual que en el ejemplo del apartado 3.3. se tiene múltiple ocurrencia de eventos que
justifican el uso de redes de Petri, sin embrago se presenta el diagrama de estados sólo
como parámetro de comparación. Note que el diagrama no esta completo pues implica más
estados y transiciones pero basta para ilustrar que no es la herramienta de modelado más
sencilla.
Figura 4.4. Diagrama de estados del sistema
4.2.2.4. Reglas de ejecución
Una vez que ha sido definido el problema se puede rescribir en forma de sentencias. Para
conseguir los anterior hay que dictar las reglas de ejecución del sistema y son las
siguientes:
1.a. Si hay pieza en la rampa
1.b. Si no hay pieza en la rampa
O el posicionador no esta retraído
Y el posicionador está retraído
Entonces apagar la banda
Entonces prender la banda
2. Si hay pieza en la rampa
Y no hay pieza en home
Y el portador está arriba
Entonces empujar la pieza
_____________________________________________________________________ 36
Capítulo 4. Pruebas y resultados
3. Si hay pieza en home
Y el portador está en la derecha
Y el portador está arriba
Y el sensor de vació está en bajo
Entonces bajar por la pieza y encender el vació
4. Si hay pieza en home
Y el portador no está arriba
Y el sensor de vació está en alto
Entonces subir con la pieza
5. Si el sensor de vació está en alto
Y el portador esta en la derecha
Y el portador esta arriba
Entonces mover a la izquierda
6. Si el portador esta en la derecha
Y el portador está arriba
Y el sensor de vació esta en alto
Entonces soltar la pieza
7. Si el portador está en la izquierda
Y el portador está arriba
Y el sensor de vació está en bajo
Entonces mover a la derecha
4.2.2.5. Definición de plazas y transiciones
Existen nueve plazas en el modelo y son:
P1: Banda transportadora
P2: Rampa
P3: Home
_____________________________________________________________________ 37
Capítulo 4. Pruebas y resultados
P4: Portador en la derecha
P5: Portador moviéndose a la izquierda
P6: Portador en la izquierda
P7: Portador moviéndose a la derecha
P8: Error debido a un retardo al subir o bajar el portador o retardo al mover el portador a la
la izquierda
P9: Error debido a un retardo en la presencia de pieza o retardo al mover el portador a la
derecha.
Las once transiciones de éste modelo son las siguientes:
T1: Encender o apagar la banda transportadora.
T2: El posicionador empuja la pieza.
T3: El portador baja y sujeta la pieza.
T4: El portador sube la pieza.
T5: El portador se mueve a la izquierda.
T6: El portador suelta la pieza y se mueve a la derecha.
T7: Esta transición es temporizada, el sistema se detiene.
T8: Esta transición es temporizada, el sistema se detiene.
T9: Reestablece al sistema después de un error.
T10: Esta transición es temporizada, el sistema se detiene.
T11: Reestablece al sistema después de un error.
4.2.2.6. Asignación de marcas
Ya que han sido definidas las plazas hay que asignar las marcas de dichas plazas. Los
recursos con los que cuenta el sistema son las piezas y el portador.
Existen seis piezas que originalmente están en P1 (banda) y un portador que inicialmente se
encuentra ubicado a la derecha (P7).
Lo anterior indica que la marcación inicial es µ 0 = (6,0,0,0,0,0,1,0,0) .
_____________________________________________________________________ 38
Capítulo 4. Pruebas y resultados
4.2.2.7. Gráfica de la red de Petri
La gráfica de la red de Petri que considera todos los incisos anteriores se muestra en la
figura 4.5.
Figura 4.5. Gráfica de la RdP del sistema.
4.2.2.8. Análisis de estabilidad
Primero se obtiene la matriz de incidencias utilizando la ecuación (2.22), A = A+ − A− .
− 1
0
0
0
0
A = 1
0
0
1
0
0
1
−1
0
0
0
0
0
0
0
0
1
−1
0
0
0
0
0
0
0
0
2
− 2
0
0
− 2
0
0
0
0
0
2
−2
0
0
−2
0
0
0
0
0
2
−2
0
0
0
0
0
−1
0
0
1
0
0
1
0
0
0
0
0
0
2
2
− 2
0
0
0
0
0
0
0
0
0
0
−1
1
0
0
1
− 1
0
0
0
0
0
0
0
0
0
Se propone un vector φ positivo del tamaño del número de plazas: φ T = [1,1,1,1,1,1,1,1,1]
Para que el sistema sea estable se debe de cumplir que la implicación de la ecuación (2.25)
Aφ ≤ 0 se satisfaga.
_____________________________________________________________________ 39
Capítulo 4. Pruebas y resultados
− 1
0
0
0
0
Aφ = 1
0
0
1
0
0
1
−1
0
1
0
0
0
0
0
0
0
0
0
0
0
0
0
−1
0
0
2
−2
0
0
2
−2
0
0
2
−1
0
0
0
0
0
0
0
0
0
0
0
0
0
0
−2
0
0
0
0
−2
0
−2
0
0
0
1
0
0
1
0
2
2
−2
0
0
0
0
0
0
0
0
0
0
−1
1
0
0
0
0
0 1 0
0 1 0
0 1 0
0 1
0
0 1 = 0
0 1 0
0 1 0
0 1 0
1 1 0
− 1
0
Como la ecuación (2.25) se satisface, es decir Aφ = 0 , entonces el sistema es considerado
como uniforme y prácticamente estable.
4.2.2.9. Control y regulación
Para realizar el análisis de control y regulación se debe satisfacer la ecuación (2.26)
AT u ≤ 0 , donde u es un vector perteneciente al espacio nulo de la matriz AT.
0
0
1
0
0
1
0 0
− 1 0 0
1 1 0
0
0
0
0
0
0
0 0
0 −1 −1 0
0
0
0
0
0
0 0
0
0
2
2
0
0
2
0
0
0 0
−
−
AT = 0 0 0
2 −2 0
0 −2 0
0 0
0
2 −2 0
0
0
0 0
0 0 0
0 0 −1 0
0
1
0
0
1 −1 1
0
0
0
2
2 −2 0 0
0 0 0
0 0 0
0
0
0
0
0
0
1 − 1
Entre los vectores de disparo de sucesión de transiciones válidos están:
u =
1
1
1
1
1
1
0
0
0
0
0
,
0
0
0
0
0
0
0
0
0
1
1
,
1
1
1
0
0
0
1
0
1
0
0
,
1
1
1
1
0
0
0
1
1
0
0
,
1
1
1
1
1
1
0
0
0
1
1
_____________________________________________________________________ 40
Capítulo 4. Pruebas y resultados
Dado que el producto AT u = 0 , el sistema es controlable y ajustable.
La interpretación física de los vectores u válidos se ofrece a continuación:
•
El vector u1T = [1,1,1,1,1,1,0,0,0,0,0] corresponde a un ciclo completo sin errores, es decir,
la banda se enciende hasta que llegue la pieza a la rampa, es empujada por el
posicionador a home, el portador baja por ella y la transporta a la izquierda, allí la pieza
cae en la banda y el portador regresa a la derecha ( σ = {t1 , t 2 , t3 , t 4 , t5 , t 6 } ).
•
El vector u 2T = [0,0,0,0,0,0,0,0,0,1,1] es un ciclo con error de temporización por ausencia
de discos: cuando el portador está en la derecha (suponiendo condiciones iniciales)
transcurre un intervalo de tiempo de espera de disco, si éste ha transcurrido el sistema
se detiene y se enciende la lámpara de error ( σ = {t10 , t11} ).
•
El vector u3T = [1,1,1,0,0,0,1,0,1,0,0] es un ciclo de error de temporización por
atascamiento de portador: cuando el portador esta tomando la pieza puede atascarse, un
temporizador revisa el tiempo que toma ejecutar dicha acción y si es superado se
detiene el sistema y se enciende la lámpara de error ( σ = {t1 , t 2 , t3 , t 7 , t9 } ).
•
El vector u 4T = [1,1,1,1,0,0,0,1,1,0,0] es un ciclo de error de temporización por
atascamiento del cilindro de accionamiento lineal a la izquierda: se produce cuando el
portador esta transportando la pieza a la izquierda y el temporizador asociado es
rebasado,
entonces se detiene el sistema y se enciende la lámpara de error
( σ = {t1 , t 2 , t3 , t 4 , t8 , t9 } ).
•
El vector u5T = [1,1,1,1,1,1,0,0,0,1,1] es un ciclo de error de temporización por
atascamiento del cilindro de accionamiento lineal a la derecha: se produce cuando el
portador esta moviéndose a la derecha y el temporizador asociado se supera, entonces
se detiene el sistema y se enciende la lámpara de error ( σ = {t1 , t 2 , t3 , t 4 , t5 , t5 , t10 , t11} ).
_____________________________________________________________________ 41
Capítulo 4. Pruebas y resultados
4.2.2.10. Simulación
La red de Petri de la figura 4.5 fue simulada satisfactoriamente en el programa HPSIM
V1.1. El sistema no sufrió bloqueo por lo que la red de Petri es viva.
Se desarrolló además un simulador específico para este experimento. El simulador gráfico
desarrollado permite que el usuario introduzca tanto parámetros como acciones y
transiciones para cualesquiera de los dos modelos (Grafcet o RdP), pueda variar el tiempo
de las transiciones temporizadas y el número de discos. Una pantalla presenta una
animación gráfica del proceso y otras dos pantallas ilustran el avance en ambos modelos.
Además se puede realizar la animación en modo demostración para dar una idea al
estudiante de lo que se desea obtener.
La figura 4.6 muestra las diferentes opciones del simulador grafico. Dicho simulador
puede ser descargado desde la página web del proyecto:
http://tecweb.tol.itesm.mx/al00960636/
Figura 4.6a. Página de simulación.
Figura 4.6b. Página de Grafcet.
_____________________________________________________________________ 42
Capítulo 4. Pruebas y resultados
Figura 4.6c. Página de red de Petri.
4.2.3. Implementación
Ya se tiene el modelo en RdP y su interpretación física. Con toda esa información es
posible escribir el programa para el PLC así como realizar la interfase gráfica con WinCC.
El primer paso para implementar consiste en elegir adecuadamente el hardware y software.
Dicho proceso se describe a continuación.
4.2.3.1. Elección de Hardware y Software
1. Elección del hardware.
Existen tres tipos de hardware a considerar: (a) el sistema electro-neumático o
electromecánico con el que se va a trabajar , (b) el PLC para operar el sistema elegido
y (c) el procesador de comunicaciones del PLC.
a) Se escogió un sistema electro-neumático que consiste de tres cilindros y una banda
transportadora. La función del dispositivo es la de tomar piezas metálicas desde
una posición inicial y llevarlas a una posición final. Dicho sistema se eligió porque
es simple desde el punto de vista académico y lo suficientemente completo para
formar en el estudiante las bases que le permitan trabajar con equipo más complejo
durante el desempeño de su actividad profesional.
b) Se utilizan PLCs de la serie 300 de SIEMENS principalmente por su robustez y
aplicabilidad en la industria.
_____________________________________________________________________ 43
Capítulo 4. Pruebas y resultados
c) El procesador de comunicaciones originalmente elegido fue el CP 343-1 [24]. Con
este procesador se puede programar al PLC desde una posición remota por medio
de TCP/IP, sin embargo su compra se pospuso debido al alto costo del mismo.
2. Elección del software.
Aquí hay tres aspectos a considerar y cada uno de ellos requiere software especifico.
a. Programación del PLC: Se utilizó STEP 7 por ser el software que SIEMENS
ofrece para programar sus PLCs de las series 300 y 400.
b. Visualización y Control: La visualización y control se puede realizar de
diferentes maneras, utilizando Applets de java, ProTool o WinCC (todos ellos
de SIEMENS) o desarrollar una interfase propia.
Con los Applets únicamente se consigue visualizar indicadores y controlar por
botones simples. ProTool [22] pude manejar visualización y control de manera
sencilla pero no sale a Internet. WinCC es muy poderoso en el aspecto de que
permite manejar gráficos, control de procesos, generación de reportes,
manipulación de bases de datos y acceso a Internet a través de WebNavigator
[23]. Finalmente, la razón por la cual es muy difícil desarrollar una interfase
propia es que el protocolo de comunicación que SIEMENS utiliza con sus
PLCs no esta disponible al consumidor.
Se eligió WinCC por ser el software que mayores ventajas ofrece sin embargo
no se utilizó la opción de salir a Internet mediante WebNavigator por su alto
precio.
c. Acceso remoto: Como se vio en la elección de hardware y software es necesario
tener acceso remoto tanto al PLC como al programa de visualización. Este
problema se resolvió utilizando el software llamado VNC con el cual se puede
_____________________________________________________________________ 44
Capítulo 4. Pruebas y resultados
acceder a la computadora (servidor) en donde están instalados los programas
STEP 7 y WinCC.
Para conectarse al servidor es necesario ingresar un password, pueden firmarse
hasta tres usuarios simultáneamente (configurable por el administrador). Al
conectarse el cliente puede utilizar los programas del servidor como si
estuviesen en su propia computadora.
4.2.3.2. Modos de operación
El panel de operación que se muestra en la figura 4.7 se usa para manejar el sistema entre
los modos de operación que a continuación se muestran:
•
Manual
•
Inicio
•
Automático
Figura 4.7. Panel de operación.
a) Modo de Inicio
Antes de iniciar cualquier ciclo automático, el sistema debe comenzar en la posición inicial.
Dicha posición implica que el portador se encuentre a la derecha y arriba, la banda
transportadora apagada, el posicionador retraido y las plazas rampa y home vacías.
_____________________________________________________________________ 45
Capítulo 4. Pruebas y resultados
El ciclo de inicio se consigue colocando la llave de modos en “Inicio” y presionando el
botón “Comenzar”. Este ciclo termina cuando se cumplen todas las condiciones
mencionadas en el párrafo anterior.
El ciclo de inicio se detiene si:
•
El botón “Parar” se presiona; el ciclo de inició continua si se presiona nuevamente el
botón “Comenzar”.
•
Si se detecta un error.
b) Modo manual
Solamente disponible a través de panel virtual de WinCC. Para iniciarlo la llave de modos
debe estar en “Manual”. Cuando la llave de modos cambia de posición todas las
operaciones del modo se reinician.
En este modo cada actuador puede ser activado al presionar el botón apropiado. Cada
actuador esta deshabilitado en caso de que se desee operar de manera incorrecta (e.g. el
portador no puede moverse de derecha a izquierda cuando esta abajo).
c) Modo automático
Se inicia cuando la llave de modos está en “Automático” y
se presiona el botón
“Comenzar”. Es condición que se haya ejecutado anteriormente un ciclo de inicio. Cuando
la llave de modos cambia de posición todas las operaciones del modo se reinician.
El modo automático se detiene si:
•
El botón “Parar” se presiona; el ciclo automático continua si se presiona nuevamente el
botón “Comenzar”.
•
Si se genera un error.
4.2.3.3. Manipulación de los modos de operación
Como se mencionó anteriormente no se puede pasar de un modo a otro con completa
libertad. Existen restricciones y básicamente consisten en arrancar el sistema en modo
_____________________________________________________________________ 46
Capítulo 4. Pruebas y resultados
inicio para poder pasar a automático. El modo manual no tiene restricciones pero el paso de
manual a automático sí. Para facilitar la comprensión en la forma de manipular los
diferentes modos de operación se expone el diagrama de estados de la figura 4.8:
Figura 4.8. Diagrama de estados de los modos.
4.2.3.4. Organización del programa
El programa se organiza como se muestra en el esquema de la figura 4.9
Figura 4.9. Esquema del programa.
Se observa que la tarea de control y supervisión se divide en sub-funciones [21].
FC1: Control de los modos de operación
FC2: Control de modo manual
FC3: Control de modo automático
FC4: Control de modo de inicio
_____________________________________________________________________ 47
Capítulo 4. Pruebas y resultados
FC5: Control de los actuadores
FC6: Despliegue de lámparas de estado
FC7: Supervisión y corrección de errores
4.2.3.5. Descripción de las funciones
1. FC1: Control de los modos de operación
Se encarga de controlar los tres diferentes modos de operación
-
Lee la llave de modos
-
Pone las variables de memoria apropiadas
-
Llama a las funciones correspondientes
2. FC2: Control de modo manual
Se encarga de controlar el modo manual
-
Lee las variables de memoria del panel virtual
-
Controla las variables de memoria de los actuadores
3. FC3: Control de modo automático
Controla el modo automático
-
Lee los interruptores “comenzar” y “parar”
-
Lee las diferentes entradas de los sensores
-
controla las variables de memoria de los actuadores
4. FC4: Control de modo de inicio
Controla el modo de inicio
-
Lee los interruptores “comenzar” y “parar”
-
Lee las diferentes entradas de los sensores
-
controla las variables de memoria de los actuadores
5. FC5: Control de los actuadores
Controla los actuadores
-
Lee las variables de memoria de los actuadores
_____________________________________________________________________ 48
Capítulo 4. Pruebas y resultados
-
Lee las diferentes entradas de los sensores
-
controla la salida de los actuadores
6. FC6: Despliegue de lámparas de estado
Controla las lámparas de estado (es responsable de colectar información del proceso)
-
Lee las variables de memoria de los actuadores
-
Lee las variables de memoria de los modos
-
Lee las diferentes entradas de los sensores
-
controla la salida de las lámparas
7. FC7: Supervisión y corrección de errores
Controla el proceso en caso de error
-
Se usa para ejecutar alguna acción correctiva en caso de error.
4.2.3.6. Asignación de entradas y salidas
•
Sensores del sistema
Símbolo Función
Entrada
B1.0
Portador en la derecha
I0.0
B1.1
Portador en la izquierda
I0.1
B2
Pieza en rampa
I0.2
B3
Pieza en home
I0.3
B4
Parte en la ventosa
I0.4
B5
Portador arriba
I0.5
B6
Posicionador retraído
I0.6
•
Salida
Actuadores del sistema
Símbolo Función
Y1.0
Mover portador a la derecha
Entrada
Salida
Q4.0
_____________________________________________________________________ 49
Capítulo 4. Pruebas y resultados
Y1.1
Mover portador a la izquierda
Q4.1
Y2
Extender posicionador
Q4.2
Y3
Encender vacío
Q4.3
Y4
Bajar portador
Q4.4
Y5
Encender banda
Q4.5
•
Panel de operación
Símbolo Función
Entrada
Salida
Lámparas
H1
Lámpara de error
Q4.6
H2
Lámpara de modo manual
Q4.7
H3
Lámpara de modo inicio
Q5.0
H4
Lámpara de modo automático
Q5.1
H5
Lámparas de portador arriba
Q5.2
H6
Lámpara de pieza en rampa
Q5.3
H7
Lámpara de pieza en home
Q5.4
H8
Lámpara de posicionador retraido
Q5.5
H9
Lámpara de vacío encendido
Q5.6
H10
Lámpara de corriendo
Q5.7
S0
Paro de emergencia
I0.7
Llave de modos
S1.1
Modo manual
I1.0
S1.2
Modo de inicio
I1.1
S1.3
Modo automático
I1.2
Pulsadores
S2
Restablecer error
I1.3
S3
Parar
I1.4
_____________________________________________________________________ 50
Capítulo 4. Pruebas y resultados
S4
Comenzar
I1.5
Nota: Las señales de entrada y salida son activas en alto.
4.2.4. Interfase Gráfica con WinCC
El programa WinCC permite que se controle y visualice de forma remota el experimento
del laboratorio virtual. WinCC ofrece ventaja como protección por password y tiempo de
práctica limitado por lo que los usuarios deben firmarse en el servidor primero.
A la interfase de control y visualización de WinCC puede accederse desde la página web
del proyecto y se muestra en la figura 4.10.
Figura 4.10. Interfase gráfica de WinCC.
4.2.4.1. Descripción de la pantalla
En la esquina superior izquierda se muestran las lámparas indicadoras de modo, estas se
encienden hasta que se hayan cumplido todas las condiciones del mismo (i.e. para modo de
inicio se requiere que no exista pieza ni en home ni en rampa, que el portador este a la
derecha, arriba y sin pieza, etc.). Debajo de las lámparas de modo están las lámparas de
error y de estado del sistema que se encienden conforme a las condiciones del proceso.
_____________________________________________________________________ 51
Capítulo 4. Pruebas y resultados
En la parte central se muestra el diagrama animado del proceso que cambia con las
condiciones del proceso (la visualización con esta pantalla se demora aproximadamente un
segundo con respecto a los cambios reales cuando se esta accediendo directamente por
adaptador MPI). En la parte superior del recuadro de visualización esta la llave de modos y
el paro de emergencia.
En la esquina superior derecha están los botones de comienzo, paro y pasos. Debajo de
ellos están los botones para operar al sistema en modo manual.
4.2.5. Visualización mediante cámara de red
Se añadió al proyecto una cámara de red con servidor integrado para visualizar el proceso
mientras WinCC esta corriendo para obtener una idea física de lo que realmente está
ocurriendo. Una fotografía del experimento del laboratorio virtual se presenta en la figura
4.11.
Figura 4.11. Experimento de laboratorio virtual.
_____________________________________________________________________ 52
Capítulo 4. Pruebas y resultados
CAPÍTULO 5
CONCLUSIONES Y TRABAJO FUTURO
5.1. CONCLUSIONES
El proyecto del Laboratorio Virtual en el ITESM Campus Toluca ha provisto acceso
remoto al primer experimento en línea de manera exitosa. Los parámetros
pueden
enviarse al servidor de VNC usando cualquier navegador de Internet. El control y
monitoreo del proceso se realizan con la interfase gráfica de WinCC. La visualización se
realizó adecuadamente con la cámara de red. La programación remota del PLC se efectuó
satisfactoriamente.
Las redes de Petri demostraron ser una herramienta de modelado efectiva para sistemas
en donde suceden múltiples ocurrencias. Se consiguió optimizar recursos y tiempo puesto
que se pueden agregar hasta nueve discos al sistema y el tiempo que le toma al portador
llevar la pieza de la posición inicial a la final ya no depende de la velocidad de la banda.
El simulador de proceso diseñado comprobó ser de gran ayuda en el proceso de pruebas
preliminares a la implementación, los estudiantes pudieron detectar algunos de sus
errores y corregirlos en un intervalo de tiempo mucho menor. Pudieron también
visualizar gráficamente el resultado físico de las acciones obtenidas del modelo de redes
de Petri o Grafcet que con anterioridad habían obtenido.
La metodología propuesta para modelar con RdP fue rápidamente comprendida y seguida
por los alumnos. La implementación en el PLC depende de la habilidad del estudiante
que realiza el programa, pero el contar con un modelo claro y sencillo minimizó mucho el
tiempo de dicha implementación.
La metodología proporcionada para trabajar en equipos internacionales se siguió
adecuadamente logrando buenos resultados en cuanto a organización y desarrollo de las
tareas asignadas. El objetivo propuesto para cada estudiante fue satisfactoriamente
_____________________________________________________________________ 53
Capítulo 5. Conclusiones y trabajo futuro
concluido y el ensamble del proyecto por sus cuatro integrantes fue exitoso, consiguiendo
con ello no solo el buen funcionamiento del sistema sino una clara integración de los
elementos del equipo.
El Laboratorio Virtual es una aportación que conjuga la aplicación de tecnología de punta
y la colaboración interdisciplinaria entre universidades con miras hacia la solución de
problemas en un mundo globalizado.
Las contribuciones de la metodología de modelado con RdP y el simulador gráfico en el
ámbito académico y técnico son: la optimización de recursos, mejoras en el tiempo de
ejecución del proceso, obtención de un modelo confiable y libre de errores, menor tiempo
de implementación y la obtención de un sistema de manufactura que funciona conforme a
las especificaciones de diseño.
Finalmente, la aportación más importante sobre las indiscutibles habilidades técnicas que
los estudiantes adquieren es la capacidad formada en el alumno para relacionarse y
resolver problemas en un contexto internacional librando las barreras del lenguaje y la
distancia.
5.2. TRABAJO FUTURO
1) Construir una serie de experimentos tanto electro-neumáticos como electromecánicos
que puedan controlarse en línea ya sea con PLCs o con tarjetas de adquisición de
datos.
2) Construir una red de PLCs conectados en línea por TCP/IP, para lo cual es necesario
adquirir y configurar apropiadamente el procesador de comunicaciones CP 343-1.
3) Configurar el programa WinCC mediante WebNavigator para controlar remotamente
la red de PLCs.
4) Conectar algunas cámaras de video propiamente seleccionadas para llevar un
seguimiento visual del proceso.
5) Crear cuartos virtuales de dialogo y participación entre las diferentes universidades
involucradas.
_____________________________________________________________________ 54
Capítulo 5. Conclusiones y trabajo futuro
REFERENCIAS
[1]
Gaona, A. (2002). “Remote control system”, Thesis, ITESM Toluca, Mexico.
[2]
Siemens.
(1999).
“SIMATIC
S7-300
installation”,http://www4.ad siemens.de/
[3]
Siemens. (2001). “Getting Started STEP 7 ”, USA: Autor.
[4]
Siemens. (1997). “WinCC control center”, manual. Germany: http://www4.ad.siemens.de
[5]
AT&T Laboratories Cambridge. (1999). “Virtual Network Computing (VNC)”, Univeristy of
Cambridge. http://www.uk.research.att.com/vnc/
[6]
Alcatel. (1999). “Vinton Cerf, the father of the Internet”, Alcatel’s International Magazine. Vol. VII,
No. 2. Paris: http://www.alcatel.com/telecom/mbd/publi/newslink/9902/interview.htm
[7]
Wagner, B.; Tuttas, J. (2001). ”Team learning in an online lab”, Frontiers in Education Conference,
31st Annual , Volume: 1, 2001 Page(s): TIF -18-22 vol.1
[8]
Shaheen, M.; Loparo, K.A.; Buchner, M.R. (1998). “Remote laboratory experimentation”. American
Control Conference, Proceedings of the 1998 , Volume: 2 , 1998 Page(s): 1326 -1329 vol.2
[9]
Batun, C.; Ma, Q. (2000). “Remote tuning of a PID position controller via Internet”, Proceedings of
the American control conference, Volume: 6 , 2000, Page(s): 4403-4406. vol.6
Programmable
controller
hardware
and
[10] Bin Jin; Guez, A. (1994) “Flexible hierarchical control of an automated assembly line”, Industrial
Technology, Proceedings of the IEEE International Conference on , 1994, Page(s): 325-329.
[11] Lauzon, S.C.; Ma, A.K.L.; Mills, J.K.; Benhabib, B. (1996). “Application of discrete-event-systems
theory to flexible manufacturing”. IEEE Control Systems Magazine , Volume: 16 Issue: 1 ,
Page(s):41-48
[12] Burke, W.; Byrne, E. (1993). “A reliable temperature control system for the Alcator C-MOD
Vacuum Vessel”. Fusion Engineering, 15th IEEE/NPSS Symposium on , Volume: 1 , 1994 Page(s):
517-520 vol.1
[13] Kanaya, N.; Asaoka, S. (1999). “Vacuum pump control system using programmable logic
controllers on the TCP/IP network for the 2.5-GeV storage ring”, Proceedings of the 1999 particle
accelerator conference.Volume:2, Page(s): 667-669.
[14] Chen, Y.; Wongladkown, C. (1991). “A real-time control simulator design for automated
manufacturing systems using Petri nets”. Robotics and Automation, 1991. Proceedings., 1991 IEEE
International Conference on , Page(s): 2542 -2547 vol.3
[15] Music, G.; Matko, D. (1999). “Petri net based control of a modular production system”. Industrial
Electronics, ISIE '99. Proceedings of the IEEE International Symposium on , Volume: 3 , 1999
Page(s): 1383 -1388 vol.3
[16] Retchkiman, Z. (2000). “A vector Lyapunov function approach for the stabilization of discrete event
systems”, Vowrez, No. 7, pp 829-838.
[17] López, E. (1997). “Introducción a las redes de Petri”. Facultad de ciencias físico-matemáticas.
Universidad Autónoma de Nuevo León.
55
[18] Murata, T. (1989). “Petri Nets: Properties, Analysis and Applications”, Proceedings of the IEEE,
77(4), Page(s): 541-580.
[19] Turban, E. (1992).”Expert Systems and Applied Artificial Intelligence”, New York: Macmillan Pub.
Co.
[20] Anschuetz, H. (2002). “HPSim petri net simulator”,Ver.1.1.
http://home.tonline.de/home/henryk.a/petrinet/e/hpsim_e.htm
[21] Kayser K.-H. (2001). “Automation System 1, Tutorial PLC”, FHTE, Germany.
[22] Siemens. (2001). “Productos y sistemas para manejo y visualización”, Catálogo ST 80 - SIMATIC
HMI. Siemens AG.
[23] Siemens. (2001). “WinCC Web Navigator V1.1”, Manual. SIMATIC HMI. Siemens AG.
[24] Siemens. (1999). “Comunicación industrial”, Catálogo IK-10 - SIMATIC NET. Siemens.
[25] Zhou M.; Venkatesh, K. (1999) ”Modeling, Simulation, and Control of Flexible Manufacturing
Systems: A Petri Net Approach “, Book news, Inc. Portland, USA.
56