Tema 3: Fuerzas aplicadas a un sólido rígido
Anuncio

AT
EU
I-
Capı́tulo 3
Introducción. Sólido rı́gido
AP
3.1.
LIC
AD
AI
Fuerzas aplicadas a un sólido
rı́gido
TO
.
FIS
I
CA
En el capı́tulo anterior estudiamos la estática de sistemas fı́sicos que, por las
caracterı́sticas del problema estudiado, podı́amos considerar como una única
partı́cula. Sin embargo, ese punto de vista no es siempre posible. Para estudiar
la dinámica de ciertos sistemas hay que tener en cuenta su tamaño, geometrı́a
y estructura interna, ası́ como el hecho de que las fuerzas puedan actuar sobre
puntos diferentes. Nosotros describiremos los sistemas mecánicos como un conjunto de partı́culas. Para muchos problemas de arquitectura e ingenierı́a no es
necesario un modelo tan general, basta con el modelo de sólido rı́gido.
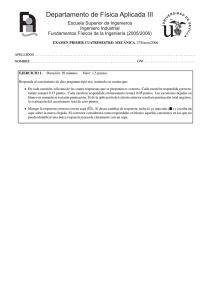
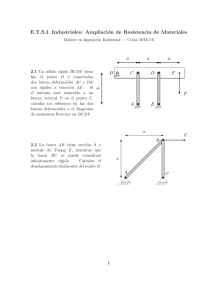
Un sólido rı́gido es un sistema de puntos materiales en el que la distancia
entre dos cualesquiera de ellos no cambia ante la acción de un sistema de fuerzas
(fig. 3.1). Es decir, un sólido rı́gido no se puede deformar.
Los sistemas fı́sicos reales no son rı́gidos, se deforman bajo la acción de
fuerzas. Sin embargo, el modelo de sólido rı́gido es aplicable cuando estas deformaciones son pequeñas comparadas con las dimensiones del sistema mecánico.
Del estudio de las deformaciones se ocupa la resistencia de materiales.
Dado que un sólido rı́gido es un sistema de puntos materiales, las fuerzas
que actúan sobre un sólido rı́gido pueden dividirse en:
Fuerzas interiores, que son aquéllas que se ejercen entre sı́ las partı́culas
que forman el sólido rı́gido y mantienen constantes las distancias entre
ellas.
DP
Fuerzas exteriores, que son las que ejercen otros cuerpos sobre el sólido
rı́gido considerado.
Las fuerzas exteriores son las únicas relevantes en el estudio del equilibrio y
movimiento del sólido rı́gido.
En este capı́tulo y en los capı́tulos 4 y 5 nos ocuparemos únicamente de
fuerzas exteriores que actúan sobre sólidos rı́gidos.
57
sólido rı́gido
i
rij
j
FIGURA 3.1: N puntos materiales forman un sólido rı́gido si cumplen la condición de rigidez: |rij | =
cte ∀ i, j = 1, 2, . . . , N , donde rij es
el vector con origen en el punto material i y extremo en el punto material j.
Fuerzas aplicadas a un sólido rı́gido
AT
58
Principio de transmisibilidad
EU
3.2.
I-
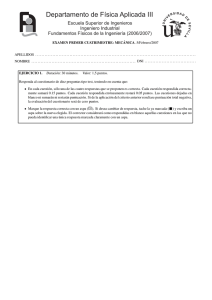
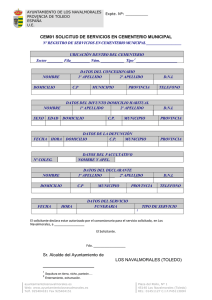
El principio de transmisibilidad afirma que las condiciones de equilibrio o
movimiento de un sólido rı́gido se mantendrán inalteradas si una fuerza F
que actúa en un punto dado del sólido rı́gido se sustituye por una fuerza F de igual módulo, dirección y sentido, pero que actúa en un punto diferente,
siempre que las dos fuerzas tengan la misma recta de acción (fig. 3.2). En ese
caso, las dos fuerzas F y F producen el mismo efecto mecánico (traslación,
rotación) sobre el sólido rı́gido, y se dice que son mecánicamente equivalentes.
Este principio tiene una base experimental. No puede ser deducido de ninguna
de las propiedades establecidas en este texto1 .
Nótese que dos fuerzas F1 y F2 , con el mismo módulo, la misma dirección
y el mismo sentido no son, en general, mecánicamente equivalentes, ya que sus
rectas de acción no tienen por qué ser coincidentes.
Nuestro estudio de la estática del sólido rı́gido se basará en cuatro principios:
F
AD
=
AI
F
FIGURA 3.2: Si el cuerpo es un sólido
rı́gido, dos fuerzas de igual módulo,
dirección y sentido que estén aplicadas sobre sendos puntos de la misma
recta de acción provocan el mismo
efecto mecánico (principio de transmisibilidad).
La regla del paralelogramo para la suma de fuerzas.
LIC
El principio de transmisibilidad.
La primera ley de Newton.
La tercera ley de Newton.
3.3.
Sistemas equivalentes de fuerzas
DP
TO
.
FIS
I
CA
AP
En el capı́tulo 2 indicábamos que las fuerzas aplicadas sobre una partı́cula
podı́an representarse mediante vectores. Estos vectores tenı́an un punto de
aplicación bien definido —la propia partı́cula— y eran, por tanto, vectores
ligados.
El principio de transmisibilidad nos dice que en el caso de fuerzas aplicadas
a un sólido rı́gido, el punto de aplicación de la fuerza no importa, siempre que
pertenezca a la recta de acción de la fuerza. Por tanto, las fuerzas aplicadas
sobre un sólido rı́gido se representarán mediante vectores deslizantes.
En este capı́tulo y en los capı́tulos 4 y 5, cada vez que hablemos de una
fuerza F nos estaremos refiriendo a una fuerza aplicada a un sólido rı́gido y,
por tanto, descrita mediante un vector deslizante. No obstante, las operaciones
y relaciones matemáticas entre vectores que se emplearán en el texto deben
entenderse como operaciones y relaciones entre vectores libres, por lo que F
representará en estos casos un vector libre con el módulo, dirección y sentido
de la fuerza. Ası́, la expresión F1 = F2 se interpretará como igualdad en módulo,
dirección y sentido de las fuerzas F1 y F2 , pero no como coincidencia de sus
rectas de acción. Si además las fuerzas tienen idéntica recta de acción, dicha
igualdad se expresará como F1 ≡ F2 .
sistema de fuerzas
Se llama sistema de fuerzas a un conjunto de fuerzas que actúa sobre un
sistema mecánico.
sistemas mecánicamente equivalentes Dos sistemas mecánicamente equivalentes son aquéllos que producen el mismo efecto mecánico si se aplican sobre un mismo sólido rı́gido.
1 Pero
sı́ del estudio de la dinámica del sólido rı́gido.
59
AT
Sistemas equivalentes de fuerzas
x
O
F2
=
F
x
O
I-
F1
(a)
Fy
O
(b)
y
y
O
x
=
−F
O
CA
(c)
x
Fx
AP
F
AD
x =
LIC
F
AI
y
y
O
EU
y
y
x
y
=
FIS
I
y
x
O
−F
F
x
O
(d)
y
TO
.
y
F
O
DP
3.3
F
x =
(e)
P
O
x
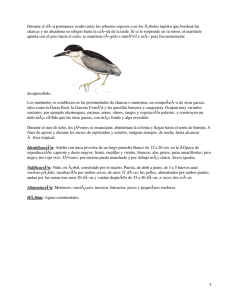
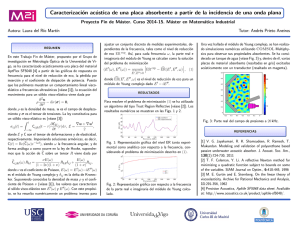
FIGURA 3.3:
Operaciones que
transforman un sistema de fuerzas
que actúa sobre un sólido rı́gido en
otro mecánicamente equivalente.
Fuerzas aplicadas a un sólido rı́gido
B
A
F
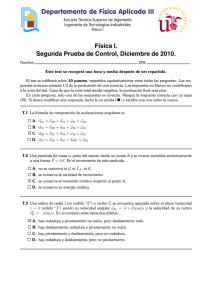
FIGURA 3.4: Dos sistemas de fuerzas mecánicamente equivalentes.
−F
B
=
−F F
A
B
−F F
A
=
B
=
A
B
A
B
AI
A
=
EU
F
I-
−F
AT
60
AD
Un sistema de fuerzas que actúa sobre un sólido rı́gido puede transformarse
en otro mecánicamente equivalente mediante una o varias de las operaciones
elementales siguientes:
(a) Sustituir dos fuerzas que actúan sobre la misma partı́cula por su suma
vectorial (ver fig. 3.3 a).
LIC
(b) Descomponer una fuerza en dos componentes aplicadas en la misma
partı́cula (ver fig. 3.3 b).
(c) Anular fuerzas iguales y opuestas que actúan sobre la misma partı́cula
(ver fig. 3.3 c).
AP
(d) Aplicar a una partı́cula dos fuerzas iguales y opuestas (ver fig. 3.3 d).
(e) Deslizar una fuerza a lo largo de su recta de acción (ver fig. 3.3 e).
DP
TO
.
FIS
I
CA
El hecho de que las operaciones (a)–(d) transformen un sistema en otro
mecánicamente equivalente se justifica a partir de la regla del paralelogramo.
El hecho de que la operación (e) transforme un sistema en otro equivalente se
justifica por el principio de transmisibilidad.
El principio de transmisibilidad y el concepto de sistemas mecánicamente equivalentes tienen limitaciones debidas al hecho de que el sólido rı́gido es
únicamente un modelo ideal; los sólidos reales no son perfectamente rı́gidos.
Por ejemplo, desde el punto de vista de la mecánica del sólido rı́gido, los dos
sistemas de fuerzas de la fig. 3.4 izda. son mecánicamente equivalentes, como se ve aplicando sucesivamente las operaciones (e) (fig. 3.4 centro) y (c)
(fig. 3.4 dcha.). Sin embargo, las fuerzas interiores son distintas y, si el sólido
no es perfectamente rı́gido, las deformaciones que provocarı́an los dos sistemas
serı́an distintas. La barra de la fig. 3.4 izda. arriba está sometida a tracción y, si
no es absolutamente rı́gida, se alargará ligeramente; la barra de la fig. 3.4 izda.
abajo está sometida a compresión y, si no es absolutamente rı́gida, se acortará ligeramente.
momento de f
3.4.
Momento de una fuerza en un punto
Sean F una fuerza aplicada sobre un sólido rı́gido, A un punto cualquiera
de la recta de acción de F y O un punto arbitrario en el espacio.
y F (ver fig. 3.5):
El momento de F en O es el producto vectorial de OA
O (F ) = OA
× F .
M
(3.1)
61
MO (F )
OA
O d
q
F
A
I-
O (F ) es un vector ligado al punto O. El punto O se llama punto de reducción
M
(en la sec. 3.8 se justificará esta denominación).
En el SI el momento de una fuerza se expresa en newton-metro (N m).
O (F ), es perpendicular tanto a OA
Nótese que el momento de F en O, M
como a F y, por tanto, perpendicular al plano definido por O y la lı́nea de
O (F ),
acción de F (ver fig. 3.5). El módulo de M
AT
Momento de una fuerza en un punto
EU
3.4
O (F )| = |F | |OA|
sen θ
|M
= |F | d,
AI
(3.2)
FIGURA 3.5: El momento de F en O,
), es perpendicular al plano
O (F
M
y F . La distancia
que determinan OA
entre O y la recta de acción de F es
)|/|F
|.
O (F
d = |M
AD
O (F )
donde d es la distancia entre O y la lı́nea de acción de F . El módulo de M
mide la tendencia de la fuerza F a imprimir al sólido rı́gido una rotación alrededor de un eje que pasa por O y es perpendicular al plano que contiene a la
fuerza F y al punto O.
O (F ) es independiente de qué punto de la recta de acción de F se elija
M
para su cálculo.
LIC
En efecto, consideremos otro punto B de la recta de acción de F . Entonces,
× F = OA
+ AB
× F
OB
AP
× F + AB
× F
= OA
O (F ) + 0 = M
O (F ),
=M
(3.3)
y F tienen la misma dirección.
puesto que AB
CA
El momento de una fuerza F en dos puntos O y P diferentes es, en
general, distinto.
En efecto,
FIS
I
P (F ) = PA × F
M
× F
= PO + OA
× F
= PO × F + OA
O (F ).
= PO × F + M
(3.4)
DP
TO
.
P (F ) puede coincidir con M
O (F ) si PO es paralelo a F .
M
Nótese que el momento de una fuerza F en un punto O determina, junto
con sus componentes, la recta de acción de la fuerza. En efecto, conocidas las
O (F ), y el punto O, podemos hallar la recta de acción
componentes de F y M
de F de la siguiente manera: Por un lado, sabemos que F está en el plano
O (F ) que pasa por O. Además sabemos que la distancia
perpendicular a M
O (F )|/|F |. La dirección de la
entre la recta de acción y O debe ser igual a |M
recta de acción debe ser la de F . Pero hay dos rectas con estas caracterı́sticas,
O (F ) determina cuál de las dos rectas es
una a cada lado de O; el sentido de M
la correcta (ver fig. 3.6).
Como el momento de una fuerza en un punto determina, junto con la propia
fuerza, la recta de acción de esta última, el principio de transmisibilidad se
puede reformular de la manera siguiente: dos fuerzas F y F aplicadas sobre
MO (F )
F
d
O d
FIGURA 3.6: En el plano perpendicu ) que pasa por O hay dos
O (F
lar a M
a una
rectas con la dirección de F
distancia d de O.
Fuerzas aplicadas a un sólido rı́gido
AT
62
EU
un sólido rı́gido son mecánicamente equivalentes (F ≡ F ) si tienen el mismo
módulo, la misma dirección, el mismo sentido y el mismo momento en un
punto O. Esto lo expresaremos escribiendo:
F = F ,
(3.5)
O (F ).
O (F ) = M
M
(3.6)
AI
I-
O (F ) = M
O (F ) para un
Si dos fuerzas F y F cumplen F = F y M
punto O, también cumplirán que MP (F ) = MP (F ) para cualquier otro
punto P . Es decir, el que dos fuerzas sean mecánicamente equivalentes
es independiente del punto de reducción elegido para comprobarlo.
En efecto,
F
P (F ) = M
O (F ) + PO × F
M
O (F ) + PO × F = M
−F
O
AD
MO
MO (F )
O
−MO (F )
P (F ).
= M
LIC
En el caso de un sólido rı́gido plano sobre el que sólo actúa una fuerza F conO
tenida en ese plano, el momento de F en un punto O del plano es un vector M
perpendicular al plano (fig. 3.7). Si el sentido de ese vector es hacia fuera del
plano, el vector se representa mediante una flecha orientada antihorariamente,
es decir, contraria al movimiento de las agujas del reloj (fig. 3.7 izda.). Si el
sentido es hacia dentro del plano, el vector se representa mediante una flecha
orientada horariamente, según las agujas del reloj (fig. 3.7 dcha.). Además, estas flechas indican cómo tenderı́a a girar el sólido rı́gido bajo la acción de F y
supuesto fijo el punto O.
Resultante y momento de un sistema de fuerzas
CA
3.5.
AP
cambia
FIGURA 3.7: Si la fuerza F
sólo de sentido, su momento en O
también cambia de sentido.
(3.7)
FIS
I
3.5.1.
TO
.
resultante
DP
momento del sistema en un punto
Definiciones
Consideremos un sistema formado por N fuerzas F1 , F2 , . . . , FN , que actúan
sobre un sólido rı́gido, en los puntos A1 , A2 , . . . , AN , respectivamente.
del sistema de fuerzas a las suma (vectorial) de las
Se llama resultante, R,
fuerzas que forman el sistema:
=
R
N
Fi .
(3.8)
i=1
La resultante es un vector libre. Los efectos de traslación de un sólido rı́gido
vienen determinados por la resultante del sistema de fuerzas.
O , a la suma (vectorial)
Se llama momento del sistema en un punto O, M
de los momentos en O de todas las fuerzas:
O =
M
N
O (Fi )
M
i=1
=
N
i=1
i × Fi ).
(OA
(3.9)
63
El momento en O es un vector ligado a O. Los efectos de rotación de un sólido
rı́gido vienen determinados por los momentos del sistema de fuerzas.
3.5.2.
Teorema del centro de reducción
I-
En general, el momento de un sistema de fuerzas es distinto en cada punto.
Cuando se conoce la resultante y el momento en un punto, el momento en
cualquier otro punto puede obtenerse mediante el siguiente resultado llamado
teorema del centro de reducción:
AT
Resultante y momento de un sistema de fuerzas
EU
3.5
P = M
O + PO × R.
M
P =
M
N
P (Fi )
M
i=1
=
N
(PAi × Fi )
=
AP
i=1
N
i ) × Fi ]
[(PO + OA
i=1
N
i × Fi )
(PO × Fi + OA
i=1
=
N
CA
=
(3.10)
LIC
En efecto,
AD
AI
El momento de un sistema de fuerzas en un punto P es igual al momento
del sistema en otro punto O, más el producto vectorial del vector PO por
del sistema. Este producto vectorial puede interpretarse
la resultante R
como el momento en P de una fuerza Ftot con las mismas componentes
aplicada en O:
que R
(PO × Fi ) +
i=1
N
i × Fi )
(OA
i=1
FIS
I
N
= PO ×
O
Fi + M
i=1
+M
O.
= PO × R
(3.11)
TO
.
El teorema del centro de reducción permite demostrar los siguientes resultados:
Cualquier sistema de resultante nula tiene el mismo momento en todos
los puntos del espacio.
DP
En efecto, usando el teorema del centro de reducción,
O + PO × R
P = M
M
O.
= M
(3.12)
El lugar geométrico de los puntos en los que el vector momento tiene las
mismas componentes es una recta con la misma dirección que la resultante
del sistema (si ésta es no nula, pues si es nula estamos en las condiciones
del resultado anterior).
Fuerzas aplicadas a un sólido rı́gido
AT
64
EU
O = M
P . Entonces,
En efecto, sean O y P dos puntos distintos tales que M
usando (3.10), P O × R = 0. Suponiendo que R = 0, y dado que PO = 0, la
conclusión es que PO es paralelo a R.
En las siguientes secciones vamos a estudiar dos sistemas de fuerzas sencillos:
los sistemas de fuerzas concurrentes y los pares de fuerzas.
F1
F3
A
F4
AI
LIC
F2
Un sistema de fuerzas F1 , F2 , . . . , FN es un sistema de fuerzas concurrentes
si todas las fuerzas están aplicadas en el mismo punto A o sus rectas de acción
se cortan en un mismo punto A (ver fig. 3.8).
Obsérvese que, utilizando las operaciones elementales (e) y (a) que permiten
transformar un sistema en otro equivalente (ver la sec. 3.3), es fácil comprobar
que cualquier sistema de fuerzas concurrentes es mecánicamente equivalente
aplicada sobre una recta de
a otro formado por una única fuerza, Ftot = R,
acción que pasa por el punto de concurrencia.
Un resultado aplicable a los sistemas de fuerzas concurrentes es el teorema
de Varignon:
AD
fuerzas concurrentes
Sistemas de fuerzas concurrentes. Teorema de
Varignon
I-
3.6.
FIGURA 3.8: Sistema de 4 fuerzas
concurrentes en el punto A.
AP
Si F1 , F2 , . . . , FN es un sistema de fuerzas concurrentes en A, el momento
O , es igual al momento en O de Ftot = R
del sistema en el punto O, M
aplicada en A, es decir
× R.
O = OA
(3.13)
M
CA
En efecto, aplicando el teorema del centro de reducción,
O = M
A + OA
×R
M
= OA × R,
(3.14)
TO
.
FIS
I
A = 0, al ser M
A (Fi ) = 0
puesto que A es el punto de concurrencia y por tanto M
para todo i.
DP
par
3.7.
Pares de fuerzas
3.7.1.
Momento de un par
Se llama par al sistema formado por dos fuerzas que tienen el mismo módulo,
la misma dirección, sentido opuesto y rectas de acción paralelas (ver fig. 3.9).
La resultante de un par es el vector nulo. Por tanto, un par no producirá traslación del sólido rı́gido.
Sin embargo, el momento de un par en un punto O no es, como vamos a
ver, el vector nulo. Un par hará que el sólido rı́gido tienda a girar.
Para calcular el momento en O de un par debemos sumar los momentos
en O de las dos fuerzas que forman el par:
2 × (−F ) = (OA
1 − OA
2 ) × F ,
1 × F + OA
OA
(3.15)
65
siendo A1 un punto cualquiera de la recta de acción de F y A2 un punto
1 − OA
2 , la
cualquiera de la recta de acción de −F . Llamando A2A1 = OA
suma de los momentos de las fuerzas del par o momento del par es
O = A2A1 × F ,
M
(3.16)
AT
Pares de fuerzas
EU
3.7
MO=MP
y su módulo vale
I-
O
O | = |F | |A2A1 | sen θ
|M
= |F | d.
AI
(3.17)
LIC
AD
O es perpendicular a los vectores F y A2A1 o, dicho de
La dirección de M
otro modo, perpendicular al plano que contiene a las fuerzas F y −F .
En principio, cabrı́a pensar que el momento en O de un par es un vector
ligado al punto O (i.e., no tiene ningún sentido colocado en cualquier otro punto). Sin embargo, nótese que la expresión (3.16) no depende de la posición de O.
El momento de un par es independiente del punto de reducción que elijamos.
Por tanto, podemos considerar que el momento de un par es un vector libre.
O . Este resultado no es sorpren par en lugar de M
Ası́ pues, podemos escribir: M
dente, pues ya vimos en el apartado 3.5.2 que cualquier sistema de resultante
nula tiene el mismo momento en todos los puntos del espacio.
En resumen, el momento de un par es un vector:
AP
Perpendicular al plano definido por las dos fuerzas.
De módulo |F | d, donde d es la distancia entre las rectas de acción de las
fuerzas.
De sentido determinado por la regla de la mano derecha (ver fig. 3.9).
Pares mecánicamente equivalentes. Suma de pares
FIS
I
3.7.2.
CA
Que puede considerarse un vector libre, puesto que es igual en todos los
puntos del espacio.
Dos pares son mecánicamente equivalentes si provocan el mismo efecto
mecánico.
Puede demostrarse, mediante las operaciones descritas en la sec. 3.3, que
dos pares son mecánicamente equivalentes si tienen el mismo momento.
DP
TO
.
EJEMPLO: El par formado por la fuerza F = (0, 1, 0) N aplicada en el punto A(2, 0, 0) m y la fuerza −F aplicada en el punto B(−2, 0, 0) m es mecánicamente equivalente al par formado por la fuerza F = (−4, 0, 0) N aplicada en
el punto C(1, 1, 0) m y la fuerza −F aplicada en el origen de coordenadas. En
ambos casos el momento del par es (0, 0, 4) N m.
Esta propiedad que acabamos de enunciar es muy importante para comprender la mecánica del sólido rı́gido. Lo único que caracteriza el efecto mecánico de
un par es su momento. Luego existen infinitos pares que provocarı́an un mismo
efecto mecánico sobre un sólido rı́gido dado. Los módulos y direcciones de las
fuerzas que constituyen estos pares pueden ser muy distintos y pueden estar
A1A2
A2
−F
F
q
MP=MO
A1
P
d
FIGURA 3.9: Par de fuerzas formado
y −F
. El sentido del
por las fuerzas F
momento del par es hacia fuera del
plano, si las fuerzas tienden a imprimir un giro antihorario, como en este
ejemplo, y hacia dentro, si tienden a
imprimir un giro horario.
Fuerzas aplicadas a un sólido rı́gido
AT
66
EU
F
F
=
OA
F
=
OA
O
F
−F
MO
O
AI
I-
O
FIGURA 3.10: Descomposición de
una fuerza aplicada en A en una fuerza aplicada en O y un par.
A
A
A
LIC
AD
aplicadas en puntos muy diferentes del sólido, con tal de que ambas fuerzas
estén contenidas en un plano perpendicular al momento del par, la distancia
entre sus lı́neas de acción sea el cociente entre el módulo del momento y el de
las fuerzas y sus sentidos sean tales de originar el sentido correcto del momento
dado.
2 es otro par
1 y M
La suma o composición de dos pares de momentos M
cuyo momento, M es la suma vectorial de sus momentos:
=M
1 +M
2.
M
(3.18)
3.8.
Reducción de sistemas de fuerzas
Descomposición de una fuerza en una fuerza en un
punto arbitrario O y un par
CA
3.8.1.
AP
1 y M
2 son vectores libres.
Esta suma tiene sentido puesto que M
DP
TO
.
FIS
I
Cualquier fuerza F que actúa sobre un sólido rı́gido puede ser trasladada a
un punto arbitrario O, sin más que añadir un par cuyo momento sea igual al
momento de F en O (fig. 3.10).
Supongamos un sólido rı́gido sobre el que actúa una fuerza F aplicada en
el punto A (fig. 3.10 izda.). En otro punto O se pueden aplicar dos fuerzas, F
y −F , sin modificar el efecto de la fuerza inicial sobre el sólido (fig. 3.10 centro).
Como resultado de esta transformación, se tiene una fuerza F aplicada en O,
más un par formado por las otras dos fuerzas (F aplicada en A y −F aplicada
par = M
O = OA
× F (fig. 3.10 dcha.).
en O) cuyo momento es M
Es decir, un sistema formado por una única fuerza siempre se puede sustituir
por un sistema mecánicamente equivalente formado por una fuerza colocada
sobre un punto arbitrario, más un par de momento adecuado. Un sistema de
este tipo se llama sistema fuerza-par. En esta descomposición el momento del
par es perpendicular a la fuerza.
3.8.2.
Reducción de un sistema de fuerzas a una fuerza en un
punto O y un par
Muchos cuerpos en arquitectura e ingenierı́a se pueden modelar mediante
sólidos rı́gidos. En general, sobre cada sólido rı́gido estará actuando un gran
67
número de fuerzas. Por ello, es extremadamente útil ser capaces de convertir
un sistema de muchas fuerzas en otro lo más sencillo posible.
Reducir un sistema de fuerzas es hallar otro sistema mecánicamente equivalente más sencillo.
AI
I-
Todo sistema de fuerzas sobre un sólido rı́gido puede reducirse a una
fuerza con las mismas componentes que la resultante del sistema, aplicada
en un punto arbitrario O, que llamaremos centro de reducción, y un par
de fuerzas cuyo momento sea el momento en O del sistema (fig. 3.11).
AT
Reducción de sistemas de fuerzas
EU
3.8
N
LIC
Ftot =
AD
En efecto, hemos visto que cualquier fuerza se puede descomponer en una
fuerza aplicada en un punto y un par (fig. 3.10). Dado un sistema de N fuerzas
F1 , F2 , . . . , FN , que actúan sobre un sólido rı́gido, en los puntos A1 , A2 , . . . ,
AN , podemos descomponer las N fuerzas que forman el sistema en otras N
fuerzas, todas ellas aplicadas en O, y en N pares (de momentos los momentos
en O de las respectivas fuerzas). La suma de las N fuerzas aplicadas en O es
una fuerza Ftot aplicada en O,
Fi
i=1
= R.
(3.19)
par =
M
N
AP
Los N pares se pueden sumar y esta suma coincide con el momento en O del
sistema,
par i
M
i=1
N
CA
=
i × Fi
OA
i=1
O.
= M
FIS
I
(3.20)
F1
TO
.
Nótese que, en general, aun cuando el momento de cada fuerza es un vector
O no es perpendicular a R.
perpendicular a dicha fuerza, M
En resumen, en el caso más general posible, cualquier sistema de fuerzas
que actúe sobre un sólido rı́gido se puede reducir a una fuerza y un par. Como
veremos más adelante, ciertos sistemas de fuerzas se pueden incluso reducir
más.
MO
MO(F3)
A1
DP
O
OA3
F3
A3
MO(F1)
=
OA2
A2
MO(F2)
F1
OA1
O
F3
F2
F2
=
Ftot=R
O
FIGURA 3.11: Reducción del siste2 , F3 a una fuer1 , F
ma de fuerzas F
aplicada en O
za deslizante Ftot = R
O.
y un par de momento M
Fuerzas aplicadas a un sólido rı́gido
Equivalencia mecánica de dos sistemas de fuerzas
EU
3.8.3.
AT
68
I-
Dos sistemas de fuerzas sobre un sólido rı́gido son mecánicamente equivalentes si pueden reducirse al mismo sistema fuerza-par en un punto
dado O. Es decir, dos sistemas de fuerzas son mecánicamente equivalentes si, y sólo si, las resultantes son iguales y los momentos del sistema en
un punto dado O son iguales. Si ambas condiciones se cumplen para un
punto O, entonces también se cumplirán para cualquier otro punto P .
AI
yM
O son la resultante y el momento en O de un sistema y
En efecto, si R
y M
la resultante y el momento en O de un sistema equivalente (es decir,
R
O
=R
y M
O = M
), usando el teorema del centro de reducción, el momento
R
O
del primer sistema en el punto P
P =
M
=
AD
O + PO × R
M
+ PO × R
M
O
,
=M
P
(3.21)
TO
.
FIS
I
invariante escalar
Llamaremos invariantes de un sistema de fuerzas a aquellas cantidades caracterı́sticas del sistema e independientes del punto de reducción. Los invariantes fundamentales son dos, si bien de ellos pueden derivarse otros.
que recibe el
El primer invariante fundamental es la propia resultante R,
nombre de invariante vectorial.
queda justificado por el hecho de ser un vector
El carácter invariante de R
libre. Obviamente, si R es invariante, lo son su módulo, dirección y sentido.
que recibe
A · R,
El segundo invariante fundamental es el producto escalar M
el nombre de invariante escalar, invariante fundamental o automomento.
Demostremos que la cantidad ası́ definida es efectivamente independiente
del punto de reducción.
Usando el teorema del centro de reducción (3.10) y la propiedad distributiva
del producto escalar:
CA
invariante vectorial
DP
tercer invariante
Invariantes de un sistema de fuerzas
AP
3.8.4.
LIC
el momento del segundo sistema en P .
siendo M
P
Recuérdese que el que un sistema sea mecánicamente equivalente a otro
implica que puede pasarse de uno a otro mediante una o varias operaciones de
las operaciones elementales descritas en la sec. 3.3.
A · R
= (M
B + AB
× R)
·R
M
B ·R
+ (AB
× R)
· R,
= M
(3.22)
donde el último sumando es cero porque el producto vectorial de un vector por
es perpendicular a R,
y el producto escalar de R
por un vector perpendicular
R
=M
B · R.
A · R
es cero. Por tanto, M
Un invariante derivado, a veces llamado tercer invariante, es
m=
A ·R
M
,
|R|
(3.23)
que es invariante por ser el cociente de dos invariantes: el invariante escalar y
el módulo del invariante vectorial. El tercer invariante tiene una interpretación
69
geométrica sencilla: es el módulo del vector proyección del momento (en un
punto cualquiera) sobre la resultante, si el vector proyección y la resultante
tienen el mismo sentido, o menos el módulo, si tienen sentido opuesto. Su
= 0)
importancia reside en que, como veremos, su valor absoluto coincide (si R
con el módulo del momento mı́nimo del sistema.
Eje central. Momento mı́nimo
I-
3.8.5.
AT
Reducción de sistemas de fuerzas
EU
3.8
eje central
AD
AI
En general, el momento de un sistema de fuerzas es distinto en cada punto.
El eje central es el lugar geométrico de los puntos del espacio en los cuales
el momento del sistema de fuerzas es mı́nimo (es decir, su módulo es mı́nimo).
= 0 el momento es el mismo en todos
Recordemos que en los sistemas con R
los puntos del espacio. Por tanto, en estos sistemas el “eje” central es todo el
espacio.
= 0. Para determinar las
Estudiemos qué sucede en los sistemas con R
caracterı́sticas del eje central de tales sistemas empecemos por escribir el invariante escalar
= |M
A | |R|
cos θ,
A · R
(3.24)
M
FIS
I
CA
AP
LIC
A y R.
Como M
A ·R
y |R|
son invariantes,
donde θ es el ángulo que forman M
|MA | cos θ ha de ser también invariante. Por tanto, |MA | será mı́nimo en aquellos puntos donde el valor absoluto de cos θ sea máximo. Ello ocurrirá cuando
sean paralelos. Es decir, el eje central es el lugar geométrico de los
A y R
M
puntos del espacio en los cuales el momento del sistema es paralelo a la resultante.
Como el eje central es un lugar geométrico de momento constante (en par (ver sec. 3.5.2).
ticular, el momento mı́nimo), ha de ser una recta paralela a R
Para hallar la ecuación del eje central en un sistema de referencia cartesiano
{O; x, y, z} procederemos de la manera siguiente: calcularemos el momento del
O = (Mx , My , Mz ) y la resultante del
sistema de fuerzas en el origen O, M
sistema R = (Rx , Ry , Rz ). A continuación, llamaremos E (xE , yE , zE ) a un
punto particular del eje central: aquél que se encuentra más próximo al punto
·R
= 0, pues el eje central es paralelo
O. Por tanto, el punto E cumplirá que OE
a la resultante.
Según el teorema del centro de reducción, los momentos del sistema fuerzas
en los puntos O y E se relacionan según
E + OE
× R.
O = M
M
(3.25)
TO
.
Por otro lado, hemos visto que el momento mı́nimo es paralelo a la resultante,
se obtiene
por lo que si multiplicamos vectorialmente la ecuación anterior por R
×M
O = R
× (OE
× R).
R
(3.26)
DP
Teniendo en cuenta la identidad del doble producto vectorial2 resulta finalmente
×M
O = |R|
2 OE,
R
(3.27)
= R × MO .
OE
2
|R|
(3.28)
y, por tanto,
2 Dados
tres vectores a, b y c, se cumple que a × (b × c) = (a · c)b − (a · b)c.
Fuerzas aplicadas a un sólido rı́gido
AT
70
EU
Conocidas las coordenadas del punto E del eje central, y dado que el eje central
la ecuación del eje central se
tiene la misma dirección que la resultante R,
obtiene inmediatamente como
x − xE
y − yE
z − zE
=
=
.
(3.29)
Rx
Ry
Rz
LIC
AD
AI
I-
En resumen: El eje central es el lugar geométrico de los puntos del espacio
en los cuales el momento del sistema de fuerzas es mı́nimo. Es también el lugar
de los puntos del espacio en los cuales el momento del sistema es paralelo a la
resultante. Conocidos la resultante y el momento del sistema en el origen, la
ecuación (3.28) nos proporciona un punto del eje central. Conocidos la resultante y un punto del eje central, la ecuación del eje central está dada por la
ecuación (3.29).
Para determinar el momento mı́nimo utilizamos el hecho de que en el eje
central el momento y la resultante son paralelos. Como el tercer invariante es,
salvo signo, el módulo del vector proyección del momento sobre la resultante,
se llega a la conclusión de que el módulo del momento mı́nimo tiene, necesariamente, que equivaler —salvo signo— al tercer invariante. Por tanto, el momento
mı́nimo de un sistema de fuerzas es el vector proyección del momento del sistema en un punto cualquiera sobre la resultante:
min = MA · R R .
M
|R|
|R|
(3.30)
3.8.6.
AP
Es decir, el momento mı́nimo tiene la misma dirección que la resultante y su
módulo y sentido vienen dados por el valor del tercer invariante.
Clasificación de los sistemas de fuerzas
CA
Podemos clasificar los sistemas de fuerzas en cuatro tipos:
FIS
I
= 0 y M
P · R
= 0. En este caso el momento mı́nimo del
Sistemas con R
sistema es no nulo. Estos sistemas no se pueden reducir ni a una única
fuerza ni a un único par. En cambio, se pueden reducir en cualquier
punto P a una fuerza deslizante Ftot , con las mismas componentes que
y un par de fuerzas {Fpar , −Fpar } de momento M
P.
R,
DP
TO
.
= 0 y M
P · R
= 0. En este caso el momento mı́nimo del
Sistemas con R
sistema es nulo. Además, en cualquier punto P que no sea del eje central,
ya que, por el teorema del centro de
el momento es perpendicular a R,
reducción,
E + PE × R
P = M
M
= P E × R,
(3.31)
siendo E un punto del eje central. Estos sistemas se pueden reducir a una
aplicada sobre
fuerza deslizante Ftot , con las mismas componentes que R,
el eje central, o a una fuerza deslizante Ftot , con las mismas componentes
aplicada en P y un par de fuerzas {Fpar , −Fpar } de momento M
P,
que R,
si P no es un punto del eje central.
= 0 y M
P = 0 (por tanto, M
·R
= 0). En este caso, el
Sistemas con R
momento es el mismo en todos los puntos del espacio. Estos sistemas se
pueden reducir a un par de fuerzas {Fpar , −Fpar } con dicho momento.
Reducción de sistemas de fuerzas
71
AT
3.8
EU
y
y
y
x
F3
=
x
O
=
R
O
x
d=MO /R
AI
O
R
I-
F1
MO
AD
F2
= 0 y M
P = 0 (por tanto, M
·R
= 0). En estos sistemas,
Sistemas con R
el momento es nulo en todos los puntos del espacio. Estos sistemas se
pueden reducir a un vector nulo. Se llaman sistemas nulos.
PROBLEMA RESUELTO 3.1:
AP
LIC
Puede demostrarse que los sistemas de fuerzas coplanarios (fig. 3.12), concurrentes y paralelos tienen invariante escalar igual a cero, por tanto pertenecen
a alguno de los tres últimos casos.
Llegados a este punto, es muy recomendable detenerse a hacer los problemas
propuestos 3-1, 3-2 y 3-3.
CA
Consideremos el sistema formado por las fuerzas
F1 = (6, −3, 1) N aplicada en A1 (1, 0, 2) m,
F2 = (2, 0, −1) N aplicada en A2 (−5, 3, 1) m,
FIS
I
F3 = (−5, −4, 1) N aplicada en A3 (0, 1, 2) m,
F4 = (2, 5, 0) N aplicada en A4 (0, 0, 0) m.
Determina:
TO
.
(a) La resultante, el momento del sistema en el origen y la ecuación del eje
central del sistema.
(b) El momento en P (3, 0, 1) m. Si P es un punto del eje central, utilı́zalo para
obtener de nuevo la ecuación del eje central.
DP
(c) El vector momento mı́nimo.
Solución:
FIGURA 3.12: Un sólido rı́gido plano sobre el que actúa un sistema de
2 , F
3 de re1 , F
fuerzas coplanarias F
sultante no nula (izda.) es equivalente a una fuerza igual a la resul del sistema aplicada en un
tante R
punto cualquiera O más un par cuyo momento es el momento del sistema en el punto O (centro) y tam con
bién a una única fuerza igual a R
recta de acción cuya distancia a O
y que está a la de 0 |/|R|
es d = |M
recha de O (dcha.). Esta recta es el
eje central.
(a) Calculemos la resultante:
= F1 + F2 + F3 + F4 = (5, −2, 1) N.
R
(P1.1)
Fuerzas aplicadas a un sólido rı́gido
AT
72
EU
Calculemos ahora el momento del sistema en el origen O:
O (F1 ) = OA
1 × F1 = (6, 11, −3) N m,
M
O (F2 ) = OA
2 × F2 = (−3, −3, −6) N m,
M
O (F3 ) = OA
3 × F3 = (9, −10, 5) N m,
M
(P1.2)
I-
O (F4 ) = OA
4 × F4 = (0, 0, 0) N m,
M
O = M
O (F1 ) + M
O (F2 ) + M
O (F3 ) + M
O (F4 )
M
AI
= (12, −2, −4) N m.
(P1.3)
AD
= ( 1 , 16 , 7 ), y usando (3.29)
De (3.28) obtenemos un punto del eje central, OE
3 15 15
obtenemos la ecuación continua del eje central, que podemos después expresar de
forma implı́cita, como la intersección de los dos planos siguientes:
LIC
2x + 5y − 6 = 0
y + 2z − 2 = 0
(b) Aplicando el teorema del centro de reducción
AP
P = M
O + PO × R
M
= (12, −2, −4) + (−3, 0, −1) × (5, −2, 1)
= (10, −4, 2) N m.
(P1.4)
CA
P es paralelo a R.
Por
Se puede ver que P es un punto del eje central porque M
tanto, usando (3.29), la ecuación del eje central resulta
x−3
y
z−1
=
=
.
5
−2
1
(P1.5)
FIS
I
(c) El momento mı́nimo se obtiene usando (3.30),
min = MO · R R = 2(5, −2, 1) = (10, −4, 2) N m.
M
|R|
|R|
(P1.6)
DP
TO
.
Obviamente, el momento mı́nimo ası́ calculado coincide con el momento del sistema
en el punto P , puesto que dicho punto pertenece al eje central.
73
3.9.
Sistemas de fuerzas paralelas
3.9.1.
Sistemas de fuerzas paralelas
AT
Sistemas de fuerzas paralelas
I-
Un sistema de fuerzas F1 , F2 , . . . FN , cuyas rectas de acción pasan respectivamente por los puntos P1 , P2 , . . . PN es un sistema de fuerzas paralelas si
∀ i Fi = λi u (fig. 3.13), donde u es un vector que tiene la dirección de todas
las fuerzas.
La resultante de un sistema de fuerzas paralelas se puede expresar como
EU
3.9
λi u
i=1
=
AI
N
N
AD
=
R
sistema de fuerzas paralelas
λi
u.
u
Pi
(3.32)
LIC
i=1
Fi
El momento de un sistema de fuerzas paralelas respecto al origen de coordenadas se puede expresar como
N
i × λi u
OP
i=1
=
N
AP
O =
M
FIGURA 3.13: Un sólido rı́gido plano sobre el que actúa un sistema de
fuerzas paralelas.
i
λi OP
i=1
× u,
(3.33)
3.9.2.
FIS
I
CA
i es el vector que va del origen de coordenadas a un punto cualquiera
donde OP
Pi de la recta de acción de la fuerza Fi .
es paralela a u y M
O es perpendicular a u. Por lo tanto, los
Es decir, R
sistemas de fuerzas paralelas tienen invariante escalar igual a cero, aun cuando
ni M
O fuesen nulos.
ni R
Centro de un sistema de fuerzas paralelas
DP
TO
.
= 0.
Supongamos un sistema de fuerzas paralelas en la dirección u y con R
¿Existe algún punto del eje central de ese sistema que se pueda calcular sin
conocer u ? Si ese punto existiera, siempre podrı́amos aplicar en él una fuerza
que serı́a equivalente
deslizante cuyas componentes coinciden con las de R
al sistema de fuerzas paralelas fuese cual fuese la orientación del sistema de
fuerzas paralelas.
Llamemos G a ese punto. Por ser un punto del eje central de un sistema de
= 0, sabemos que M
G = 0, de manera que
invariante escalar igual a cero y R
el momento en el origen de coordenadas O (0, 0, 0), no es más que (usando el
teorema del centro de reducción):
×R
O = OG
M
N
× u.
λi OG
=
i=1
(3.34)
Fuerzas aplicadas a un sólido rı́gido
AT
74
N
λi
=
OG
EU
Comparando (3.33) y (3.34), observamos que una posible solución es
N
i=1
i.
λi OP
(3.35)
i=1
Entonces, el vector posición del punto G vendrá dado por
i=1
i
λi OP
.
N
(3.36)
AI
=
OG
I-
N
i=1
λi
LIC
AD
Nótese que aunque G es independiente de la dirección de las fuerzas, sı́ depende de los puntos Pi donde se consideraron aplicadas las fuerzas. Por tanto,
sólo podremos aplicar en G una única fuerza, equivalente al sistema de fuerzas e independiente su orientación, en tanto que no cambien los puntos Pi de
aplicación de las fuerzas.
se suele emplear la notaPara escribir las componentes cartesianas de OG
ción
= xGı + yGj + zGk.
OG
(3.37)
N
xG =
TO
.
FIS
I
CA
AP
Si llamamos (xi , yi , zi ) a las componentes cartesianas de los vectores de posición
i , entonces las componentes cartesianas de OG
se calcularán de la siguiente
OP
manera:
λi xi
i=1
N
i=1
N
yG =
i=1
zG =
(3.38)
,
(3.39)
.
(3.40)
λi
λi yi
i=1
N
N
,
λi
λi zi
i=1
N
i=1
λi
El punto G cuyas coordenadas se calculan mediante las ecs. (3.38)–(3.40) es lo
que se denomina el centro de un sistema de fuerzas paralelas.
DP
PROBLEMA RESUELTO 3.2:
Consideremos el sistema de fuerzas formado por los pesos de tres partı́culas puntuales de 1 kg colocadas en los vértices de un triángulo descritos por las coordenadas A (−3, 0) m, B (0, 0), y C (0, 4) m. Calcula:
(a) la ecuación del eje central.
Centro de gravedad y centro de masa
75
AT
3.10
Supongamos ahora que el triángulo cambia de posición de manera que el vértice
A pasa a estar en el punto A (0, 3) m, B permanece en el origen y C pasa a estar
en el punto C (4, 0) m.
AI
I-
(c) Calcula la ecuación del eje central del sistema formado por los pesos de la
partı́culas.
EU
(b) las coordenadas del centro del sistema.
Solución:
AP
LIC
AD
(a) Por el hecho de ser un sistema plano de fuerzas, el momento del sistema y la
resultante son perpendiculares, luego el invariante escalar es igual a cero. Por tanto,
el momento mı́nimo del sistema es nulo. Por ser un sistema de fuerzas paralelas,
sabemos que el eje central ha de tener la misma dirección que todas esas fuerzas;
será pues un eje vertical. Para averiguar en qué punto del eje horizontal corta el
eje central, un procedimiento sencillo es el siguiente: se traslada a lo largo de su
recta de acción la fuerza que está aplicada en C hasta colocarla en B. El sistema
se reduce pues a dos fuerzas paralelas y con el mismo sentido, la de la derecha de
doble módulo que la de la izquierda y separadas por 3 m. Por tanto, el eje central
deberá estar entre ambas fuerzas al doble de distancia de la fuerza de la izquierda.
Luego el eje central es la recta de ecuación x = −1 m.
(b) Aplicando (3.38) y (3.39) obtenemos (xG , yG ) = (−1, 43 ) m.
FIS
I
CA
(c) Al girar el triángulo, el centro del sistema pasa a tener coordenadas (xG , yG ) =
( 43 , 1) m. Como sabemos que el eje central es una recta vertical que pasa por el
centro del sistema de vectores paralelos, su ecuación será ahora x = 43 m.
3.10.
Centro de gravedad y centro de masa
3.10.1.
Centro de gravedad
DP
TO
.
El centro de gravedad de un sistema de partı́culas materiales es el centro del
sistema de fuerzas formado por los pesos de las partı́culas.
Consideremos el sistema formado por N partı́culas de pesos m1 g1 , m2 g2 ,
. . ., mN gN colocadas en los puntos P1 , P2 , . . ., PN (gi es la aceleración de
la gravedad en el punto Pi ). Suponiendo que todas las gi son paralelas, gi =
−gi k, aplicando la definición (3.36), el vector posición del centro de gravedad
vendrá dado por:
N
i
mi gi OP
i=1
OG =
,
(3.41)
N
mi g i
i=1
centro de gravedad
Fuerzas aplicadas a un sólido rı́gido
AT
76
N
x̄ =
mi gi xi
i=1
N
i=1
i=1
N
,
(3.43)
,
(3.44)
mi g i
mi g i z i
i=1
N
AD
z̄ =
(3.42)
mi g i y i
i=1
N
AI
ȳ =
,
mi g i
I-
N
EU
cuyas componentes cartesianas son:
i=1
mi g i
3.10.2.
Centro de masa
El centro de masa de un sistema de partı́culas materiales de masas m1 , m2 ,
. . ., mN colocadas en los puntos P1 , P2 , . . ., PN , es el punto G que viene dado
por:
N
i
mi OP
i=1
OG =
,
(3.45)
N
mi
AP
centro de masa
LIC
i.
siendo (xi , yi , zi ) las componentes cartesianas de OP
i=1
DP
TO
.
FIS
I
CA
cuyas componentes cartesianas son:
N
x̄ =
mi xi
i=1
N
i=1
N
ȳ =
i=1
z̄ =
(3.46)
,
(3.47)
.
(3.48)
mi
mi y i
i=1
N
N
,
mi
mi z i
i=1
N
i=1
mi
El centro de gravedad (3.41), supuesta la aceleración de la gravedad constante, coincide con el centro de masa de dicho sistema de partı́culas. Esta
condición se cumple, con muy buena aproximación, para los cuerpos que se
manejan habitualmente en Arquitectura Técnica.
Para calcular el centro de masa de cuerpos continuos (y no sólo para conjuntos de puntos materiales aislados) basta sustituir los sumatorios en (3.46)–
(3.48), respectivamente, por integrales. Ası́, las coordenadas del centro de masa
Centro de gravedad y centro de masa
77
AT
3.10
x dm
M
x̄ = dm
,
(3.49)
M
y dm
M
,
ȳ = dm
M
z dm
M
z̄ = ,
dm
AI
I-
(3.50)
(3.51)
M
FIS
I
CA
AP
LIC
AD
donde dm es ρ dV en una distribución volumétrica de masa, σ dS en una distribución superficial de masa, λ dl en una distribución lineal de masa. Las cantidades ρ, σ, λ son, respectivamente, las densidades volumétrica, superficial y
lineal de la correspondiente distribución de masa. Si la densidad de masa es
constante diremos que el cuerpo es homogéneo. Para cuerpos homogéneos, las
densidades que aparecen en (3.49)–(3.51) se cancelan y el centro de masa se
convierte en una caracterı́stica puramente geométrica del cuerpo y recibe el
nombre de centroide.
En el caso de que nuestro sistema de puntos materiales sea un sólido rı́gido
(y por tanto las fuerzas aplicadas, en este caso los pesos, se comporten como
vectores deslizantes), el centro de masa (o el centro de gravedad) es el punto
en el que se puede aplicar el vector peso total para que sea equivalente al
sistema de vectores peso con la particularidad de que su posición no depende
de la dirección de los vectores peso (por tanto, no depende de la orientación del
cuerpo con respecto a la superficie terrestre), ni del sistema de referencia elegido
(aunque sus coordenadas serán distintas en sistemas de referencias distintos).
La posición del centro de masa puede no coincidir con ningún punto material del sistema. Por ejemplo, en el sistema formado por cuatro masas iguales
dispuestas en los vértices de un cuadrado, el centro de masa está en el centro
del cuadrado.
El centro de masa puede ser un punto exterior al sistema. Por ejemplo, en
un sólido rı́gido plano homogéneo con forma de L el centro de masa puede no
estar en ningún punto del sólido.
3.10.3.
Centro de masa de cuerpos compuestos
DP
TO
.
Sea un sistema de N puntos materiales de masas mi cuyos vectores posición
i . Dividamos mentalmente el sistema en dos partes, la formada por los
son OP
S primeros puntos y la formada por los restantes N − S puntos. Es fácil ver
que
N
S
N
mi =
mi +
mi .
(3.52)
i=1
i=1
i=S+1
Además, empleando (3.45), podemos escribir
OG
N
i=1
mi =
N
i=1
i
mi OP
EU
serı́an:
Fuerzas aplicadas a un sólido rı́gido
y
=
x
O
S
=
O
I-
x
O
+
AI
FIGURA 3.14: Para calcular el centro de masa de la figura de la izquierda se puede proceder dividiendo
en las dos porciones de la derecha y
aplicando la ec. (3.57).
y
EU
y
AT
78
i+
mi OP
i=1
N
i.
mi OP
x
(3.53)
i=S+1
AD
Ahora bien, los S primeros puntos forman un subsistema cuyo centro de masa
G1 está definido por:
S
S
i.
1
OG
mi =
mi OP
(3.54)
i=1
i=1
LIC
De la misma manera, los restantes N − S puntos forman otro subsistema cuyo
centro de masa G2 está definido por:
AP
2
OG
N
N
mi =
i=S+1
i.
mi OP
(3.55)
i=S+1
CA
Llamando
M1 =
S
mi ,
i=1
M2 =
N
mi ,
(3.56)
i=S+1
DP
TO
.
FIS
I
podemos reescribir (3.53) como
momento estático
= M1 OG1 + M2 OG2 .
OG
M1 + M2
(3.57)
Esta propiedad es muy útil para el cálculo de centros de masa de sistemas
compuestos a partir de otros cuyo centro de masa sea sencillo de calcular.
También es útil para el cálculo del centro de masa de sistemas que se puedan
expresar como resta de sistemas sencillos.
En el apéndice C se presentan los centros de masa de algunas lı́neas y
superficies planas homogéneas.
3.10.4.
Momento estático. Teoremas de Arquı́medes
El momento estático de un sistema de puntos materiales respecto a un plano
es la suma de los productos de las masas por sus respectivas distancias al plano.
Las distancias van afectadas de un signo que depende de si las partı́culas están
a un lado u otro del plano.
79
Ası́, el momento estático de un sistema de N masas mi a distancias di del
plano Π vendrá dado por
N
MΠ =
mi di .
(3.58)
i=1
V
En el SI el momento estático se mide en kilogramo-metro (kg m).
AI
I-
En el caso de sistemas continuos de densidad ρ = ρ(x, y, z), el momento estático
respecto al plano Π vendrá dado por
MΠ =
d ρ dV.
(3.59)
AT
Centro de gravedad y centro de masa
EU
3.10
AD
El momento estático de un sistema de puntos materiales respecto a un
cierto plano es igual al momento estático del centro de masa suponiendo
que toda la masa del sistema estuviese concentrada en él.
MΠ =
N
mi z i
i=1
N
mi
i=1
= d¯
N
AP
= z̄
mi ,
i=1
LIC
En efecto, sea eligiendo un sistema de referencia cartesiano de manera que
el plano xy coincida con Π, se puede escribir:
(3.60)
FIS
I
CA
donde d¯ es la distancia del centro de masa al plano Π. Por tanto, el momento
estático respecto a cualquier plano que contenga al centro de masa es cero (ya
que d¯ = 0) y viceversa: cualquier plano de momento estático cero contiene al
centro de masa.
Consecuencia de la propiedad anterior son los llamados teoremas de Arquı́medes, muy útiles para determinar el centro de masa de cuerpos homogéneos
simétricos:
Si un cuerpo homogéneo tiene un plano de simetrı́a el centro de masa
está en dicho plano.
TO
.
En efecto, basta con observar que un plano de simetrı́a es un plano respecto
al cual el momento estático del sistema de puntos materiales es nulo, por tener
el sistema masas iguales a distancias iguales y opuestas respecto al plano.
DP
Si un cuerpo homogéneo tiene un eje de simetrı́a el centro de masa está en
dicho eje.
En efecto, basta con observar que cualquier eje de simetrı́a es la intersección
de dos o más planos de momento estático nulo.
Si un cuerpo homogéneo tiene un centro de simetrı́a dicho punto coincide
con el centro de masa.
Arquı́medes (Siracusa, hacia 287
a. de J. C.; Siracusa, 212 a. de
J. C.): Es uno de los más grandes pensadores de la Antigüedad.
En Matemáticas, entre otras cosas, determinó el área del cı́rculo, el perı́metro de la circunferencia
y un valor aproximado para π. En
Fı́sica, es el fundador de la Estática (con las leyes de las palancas) y
de la Hidrostática (con el teorema
de Arquı́medes).
Fuerzas aplicadas a un sólido rı́gido
FIGURA 3.15: En general, un plano
que pase por el centro de masa no divide al sistema mecánico en dos partes de igual masa ni de igual volumen
ni de igual longitud.
G
I-
G
EU
AT
80
3.11.1.
Densidad de carga
LIC
Sistema de fuerzas distribuidas
Las fuerzas aplicadas al sólido rı́gido pueden ser de naturaleza discreta o
continua, es decir, pueden estar aplicadas sobre puntos discretos o bien sobre
una cierta región (por ejemplo, la superficie de apoyo de un sólido rı́gido con el
suelo). En este último caso se dice que las fuerzas están distribuidas en dicha
región.
En el caso de fuerzas distribuidas, la densidad de fuerza o densidad de
carga es la fuerza que actúa por unidad de volumen (o por unidad de superficie
o longitud, según el sistema de fuerzas esté distribuido sobre un volumen, una
superficie o una longitud).
En general, la densidad de fuerza es distinta en cada punto. Supondremos
que se puede expresar como una función vectorial de las coordenadas cartesianas del punto,
DP
TO
.
FIS
I
CA
densidad de carga
3.11.
AP
densidad de fuerza
AD
AI
En efecto, basta con observar que cualquier centro de simetrı́a es la intersección de tres o más planos de momento estático nulo.
En general, un plano de momento estático nulo (es decir, un plano que pase
por el centro de masa) no divide al sistema mecánico en dos partes de igual
masa ni de igual volumen ni de igual longitud; lo que es igual en ambas partes
es la suma de los productos de las masas por sus correspondientes distancias
al plano.
f(x, y, z) = fx (x, y, z)ı + fy (x, y, z) j + fz (x, y, z) k.
(3.61)
EJEMPLO: La densidad de carga que corresponde a una fuerza total de F =
−6 j kp repartida de modo uniforme a lo largo de 3 m de longitud es f =
−2 j kp/m.
Como ocurrı́a en los sistemas de fuerzas discretas, un sistema de fuerzas
distribuidas también se puede reducir a una fuerza deslizante con las mismas
componentes que la resultante aplicada en un punto cualquiera Q más un par
cuyo momento sea el momento en Q del sistema. Consideremos, por ejemplo, un
sistema de fuerzas distribuidas en un cierto volumen V del sólido rı́gido. Sobre
cada elemento infinitesimal de volumen dV actuará una fuerza dF = f dV . La
resultante vendrá dada entonces por:
R =
dF
Sistema de fuerzas distribuidas
81
y
y
f (x)
R
=
O
x
x
I-
x
O
EU
AT
3.11
f (x)
x
O
x
AD
O
R
=
f dV,
=
LIC
AP
V
x
(3.62)
V
y el momento en Q del sistema por:
× dF
QP
MQ =
× f dV,
=
QP
FIGURA 3.17: Densidad de carga y
superficie de carga de una carga rectangular (arriba izda.) y de una triangular (abajo izda.). Esas cargas son
mecánicamente equivalentes a una
cuya lı́nea de acción
única carga R
pasa por centroide de la superficie de
carga (dcha.).
AI
y
y
(3.63)
donde P indica el punto de cada elemento de volumen dV .
3.11.2.
Cargas planas rectas
DP
TO
.
FIS
I
CA
Una carga plana recta es un sistema de fuerzas paralelas y con el mismo
sentido distribuidas a lo largo de una lı́nea recta.
En este texto estudiaremos únicamente cargas planas aplicadas perpendicularmente a una recta. Por ejemplo, el peso de la nieve que se ha acumulado
sobre una viga horizontal se puede estudiar como una carga plana de este tipo.
Si suponemos que el eje x de nuestro sistema de referencia coincide con la lı́nea
de la viga, la carga distribuida se representa por la función densidad lineal de
carga, f (x), que se mide en unidades de fuerza por unidad de longitud (N/m
en el SI). Representaremos esta función sobre el eje y de nuestro sistema de
referencia (fig. 3.16). En esta representación, a la superficie limitada por la densidad de carga se le llama superficie de carga. Esta superficie tiene dimensiones
de fuerza puesto que en el eje horizontal tenemos longitudes y en el vertical
densidades lineales de carga.
Según la forma que tenga la superficie de carga hablaremos de cargas rectangulares o uniformemente distribuidas, en las que la densidad lineal de carga es
constante en todos los puntos (fig. 3.17 arriba izda.), triangulares o uniformemente variables (fig. 3.17 abajo izda.), trapezoidales, parabólicas, irregulares,
etc.
Las cargas planas que estamos considerando en este texto pueden representarse mediante un sistema de fuerzas paralelas de la forma
dF = dF (−j)
= f (x) dx (−j).
(3.64)
carga plana recta
y
f (x)
O
x
FIGURA 3.16: Densidad de carga
f (x) de una carga distribuida perpendicularmente sobre el eje x.
Fuerzas aplicadas a un sólido rı́gido
AT
82
I-
EU
Dado que la resultante del sistema es no nula, éste siempre puede reducirse
a una fuerza única igual a la resultante aplicada en el centro del sistema. La
resultante tendrá la misma dirección y sentido que la carga distribuida y su
módulo se calcula como:
R=
dF
=
f (x) dx,
(3.65)
x
O
AP
FIGURA 3.18: Densidad de carga
f (x) de una carga distribuida perpendicularmente sobre el eje x. El
“área” sombreada, de anchura dx,
vale f (x) dx.
AI
dx
donde la integral se extiende a la región de aplicación de la carga plana. Ahora
bien, puesto que el integrando f (x) dx representa el elemento de área dS bajo
la curva f (x) (fig. 3.18), el módulo de la resultante del sistema de fuerzas es
igual al área encerrada bajo la función f (x), que es el área de la superficie de
carga y que suele denominarse carga total.
Para hallar la coordenada x del centro del sistema de fuerzas paralelas basta
sustituir, en la expresión (3.38), el sumatorio de las fuerzas extendido a todas
las fuerzas discretas por la integral extendida a las fuerzas infinitesimales dF :
x dF
xG = dF
xf (x) dx
= f (x) dx
x dS
= dS
= x̄,
(3.66)
AD
f (x)
LIC
y
FIS
I
f (x)
y
CA
donde x̄ es la coordenada x del centroide de la superficie de carga. Nótese que,
al ser las fuerzas distribuidas verticales, conociendo la coordenada x̄ del centroide de la superficie de carga la lı́nea de acción de la fuerza única equivalente
al sistema queda perfectamente determinada, sin necesidad de determinar la
coordenada ȳ (fig. 3.17 dcha.).
3.11.3.
O
x
DP
TO
.
FIGURA 3.19: Sistema de fuerzas paralelas cuya densidad de cargas f =
f (x) es directamente proporcional a
la distancia al eje y.
viga
Fuerzas proporcionales a la distancia. Flexión pura.
Momento de inercia
Estudiaremos a continuación un caso particular de fuerzas distribuidas: las
fuerzas paralelas cuya densidad de carga es directamente proporcional a la
distancia a un eje (fig. 3.19).
Fuerzas de este tipo aparecen en dos aplicaciones de interés en arquitectura:
Vigas sometidas a una flexión pura.
Fuerzas hidrostáticas sobre una superficie plana.
A continuación estudiaremos el caso de vigas sometidas a flexión pura; el otro
caso lo estudiaremos en el capı́tulo 6.
En este apartado abandonaremos momentáneamente el modelo de sólido
rı́gido; supondremos que un sistema de fuerzas que actúa sobre un sólido puede producir su deformación. En particular, estudiaremos un tipo sencillo de
deformaciones.
Una viga es un sólido homogéneo e isótropo engendrado por una sección
83
fibra de una viga
y
(x,y)
dS k
x
O
z
FIGURA 3.20: Sección transversal de
la viga y sistema de referencia elegido.
directriz de la viga
elástica de la viga
FIS
I
CA
AP
LIC
AD
AI
I-
plana S, que generalmente admite un plano de simetrı́a, y cuyo centroide describe una curva denominada directriz de modo que el plano que contiene a S
es normal en cada punto a dicha directriz.
Una fibra de una viga es el elemento de volumen generado por un elemento infinitesimal de superficie de la sección transversal de la viga cuando esta
sección se desplaza a lo largo de la directriz. En particular, la fibra que se engendra a partir de un elemento de superficie tomado alrededor del centroide de
la sección se denomina fibra media.
Consideremos una viga homogénea cuya sección transversal tiene dos ejes
de simetrı́a y en la que la distribución de masa es uniforme (σ = cte). En esa
sección, elijamos un sistema de referencia cartesiano {O; x, y} con origen en el
centro de masa de la sección transversal, es decir (x̄, ȳ) = (0, 0) (fig. 3.20).
Supongamos que sobre la viga actúan dos pares de fuerzas iguales y opuestos
aplicados en sus extremos (fig. 3.21). Se dice entonces que la viga está sometida
a una flexión pura.
Se llama directriz de la viga al lugar geométrico de los centros de masa de
las secciones transversales de la viga. La directriz es, por tanto, perpendicular
a cada una de las secciones transversales.
La curva que adopta la directriz después de una deformación se llama elástica de la viga.
Para simplificar nuestro análisis, consideraremos que la deformación que
sufre la viga cumple la hipótesis de Navier, es decir: toda sección plana perpendicular a la directriz permanece plana y perpendicular a la directriz después de
la deformación.
Al deformarse la viga, se alargan las fibras longitudinales del lado convexo,
que están sometidas a tracción, y se acortan las fibras del lado cóncavo, que
están sometidas a compresión. Entre ellas siempre existe una fibra que mantiene
constante su longitud (fig. 3.22).
Se llama lı́nea neutra o fibra neutra a aquella fibra que mantiene constante
su longitud.
El alargamiento por unidad de longitud de una fibra situada a una distancia
y de la lı́nea neutra (fig. 3.22) viene dado por
AT
Sistema de fuerzas distribuidas
EU
3.11
y
∆l
= ,
l0
r
(3.67)
TO
.
donde l0 es la longitud de la fibra antes de la deformación y r es el radio de
curvatura de la lı́nea neutra tras la deformación (fig. 3.22).
Suponiendo que los alargamientos sufridos por las fibras cumplen la ley de
Hooke, es decir que el alargamiento por unidad de longitud de cada fibra es
proporcional a la fuerza e inversamente proporcional al área de la sección de la
fibra, podemos escribir
1F
∆l
,
(3.68)
=
l0
ES
y
z
y
M
−M
z
FIGURA 3.21: Viga antes (arriba) y
después (abajo) de ser sometida a
una flexión pura.
Claude Louis Marie Henri Navier
(Dijon, 1785; Parı́s, 1836): Ingeniero y constructor de puentes, es
hoy fundamentalmente recordado
por la llamada ecuación de NavierStokes de la dinámica de fluidos.
r
DP
línea neutra
donde E es una constante caracterı́stica del material de la viga, que se llama
y fi
bras
n
ó
módulo de Young .
i
sometidas a compres
f ib
En la ec. (3.68) es fácil comprobar que E tiene dimensiones de fuerza/superficie.
ió n
ras s
ometidas a tracc
En el SI el módulo de Young se mide en newton por metro cuadrado (N/m2 ) o,
lo que es lo mismo, pascal (Pa). Los módulos de Young de diferentes materiales
pueden encontrarse en el capı́tulo 8.
FIGURA 3.22: Comportamiento de
las fibras longitudinales de una viga
sometida a flexión pura.
Fuerzas aplicadas a un sólido rı́gido
y
EU
F
k
f(x, y) =
S
E =
y k,
r
(3.69)
es decir, es directamente proporcional a la distancia al eje x (fig. 3.23).
En el sistema de referencia elegido al principio (fig. 3.23) la resultante de
las fuerzas internas tiene la siguiente expresión:
=
f dS
R
E
=
y dS k
r
E
=
y dS k
r
E
ȳ S k.
(3.70)
=
r
z
Por otro lado, si la viga está en equilibrio la resultante de las fuerzas internas
es nula porque las fuerzas internas equivalen a un par. Por tanto, ȳ = 0, de
donde se deduce que la fibra neutra coincide con la fibra media.
El sistema de fuerzas es equivalente a un par cuyo momento en O es
E O =
M
y k dS
(xı + y j) ×
r
E
E 2
= −
x y j dS +
y ı dS
r
r
E
=
(3.71)
y 2 dSı.
r
CA
AP
FIGURA 3.23: Perfil de la densidad de
cargas sobre la sección transversal.
LIC
O
AD
AI
f (x,y)
De (3.67) y (3.68) se llega a que la densidad superficial de carga viene dada
por
I-
Thomas Young [Milverton (Somerset), 1773; Londres, 1829]:
Además de por sus estudios sobre elasticidad y resistencia de materiales, también es famoso porque en 1801 demostró, mediante
un experimento de interferencia, la
naturaleza ondulatoria de la luz.
AT
84
FIS
I
Nótese que la primera integral en (3.71) es cero sólo si la viga y el sistema de
referencia elegido tienen las caracterı́sticas descritas antes.
Se llama momento de inercia (o momento de segundo orden) de la sección
respecto al eje x a la cantidad
Ix = y 2 dS.
(3.72)
TO
.
momento de inercia
DP
producto de inercia
El momento de inercia es es una cantidad positiva y, en el SI, se mide en
kilogramo-metro cuadrado (kg m2 ).
La integral
Pxy =
x y dS
(3.73)
se denomina producto de inercia y vale cero por ejemplo si algún eje (x ó y) es
de simetrı́a.
Cuanto mayor sea el momento de inercia, mayor será la resistencia a la flexión ofrecida por la viga. Ello explica por qué los perfiles habituales de las vigas
son en forma de I, L, C (cuadrada), U (cuadrada): estas formas geométricas
tienen momentos de inercia grandes y por tanto aumentan la resistencia a la
flexión.
85
El momento de inercia respecto al eje x de un sistema plano de N puntos
materiales de masas mi y coordenadas (xi , yi ) es
Ix =
N
mi yi2 .
(3.74)
i=1
AT
Sistema de fuerzas distribuidas
EU
3.11
I-
Un resultado (que no demostraremos) muy útil para el cálculo de momentos
de inercia, es el llamado teorema de Steiner:
Jakob Steiner (Utzenstorf, 1796;
Berna, 1863): Fue uno de los grandes contribuidores a la geometrı́a
proyectiva.
AD
AI
Si IG es el momento de inercia de un cuerpo de masa m respecto a un
eje lG que pasa por el centro de masa del cuerpo, entonces el momento
de inercia respecto a un eje paralelo a lG que esté a una distancia d de lG
es
(3.75)
I = IG + m d2 .
LIC
En el apéndice C se presentan los momentos de inercia de algunas lı́neas y
superficies planas frecuentes.
PROBLEMA RESUELTO 3.3:
CA
AP
Sobre un sólido rı́gido actúan cuatro fuerzas coplanarias, F1 , F2 , F3 y F4 , de las
que se conoce que sus rectas de acción pasan por los puntos (0, 0) m, (0, 1) m,
(1, 1) m y (1, 0) m respectivamente, según se muestra en la figura. Los módulos de
las fuerzas F1 y F2 son iguales a 10 N, los ángulos α y β son tales que tan α = 34
y tan β = 12 , y las componentes x e y de las fuerzas F4 y F3 valen F4x = −4 N y
F3y = 5 N.
(a) Determina el sistema fuerza-par equivalente en el origen de coordenadas.
FIS
I
(b) ¿Puede la fuerza 1ı N, aplicada en el origen de coordenadas, ser una de las
fuerzas del par?
(c) Si es ası́, y si tomamos la segunda fuerza del par aplicada en un punto del
eje OY , ¿dónde deberı́amos aplicarla?
(d) Reduce el sistema de las cuatro fuerzas iniciales a sólo dos fuerzas, una de
las cuales esté aplicada en el origen de coordenadas.
TO
.
(e) ¿Es posible reducir el sistema de fuerzas a una sola fuerza en algún punto del
espacio? Si es ası́, averigua sobre qué punto del eje OX deberı́a aplicarse.
DP
(f) Obtén la ecuación del eje central del sistema de fuerzas.
Fuerzas aplicadas a un sólido rı́gido
AI
I-
EU
AT
86
AD
PROBLEMA RESUELTO 3.3
Solución:
LIC
(a) Determinamos primero la expresión analı́tica de las fuerzas. Las fuerzas F1
y F2 son paralelas a los ejes coordenados y sus módulos son conocidos, por lo que
podemos escribir directamente,
F1 = 10ı = (10, 0) N,
F2 = 10j = (0, 10) N.
(P3.1)
(P3.2)
CA
AP
En cuanto a las fuerzas F3 y F4 , sabemos que
3
|F4y |
= ,
|F4x |
4
|F3y |
1
tan β =
= ,
|F3x |
2
tan α =
(P3.3)
(P3.4)
FIS
I
y dado que |F4x | = 4 N y |F3y | = 5 N resulta |F4y | = 3 N y |F3x | = 10 N. Teniendo
en cuenta la orientación de las fuerzas podemos escribir
F3 = 10ı + 5j = (10, 5) N,
F4 = −4ı + 3j = (−4, 3) N.
(P3.5)
(P3.6)
DP
TO
.
El sistema fuerza-par equivalente en el punto O estará formado por una fuerza
Ftot =
=
R
F1 + F2 + F3 + F4
= 16ı + 18j
= (16, 18) N,
(P3.7)
cuya lı́nea de acción pasa por O, y un par de fuerzas de momento
par = M
O
M
O (F1 ) + M
O (F2 ) + M
O (F3 ) + M
O (F4 )
= M
× F1 + OP
2 × F2 + OP
3 × F3 + OP
4 × F4
= OO
= (ı + j ) × (10ı + 5 j ) +ı × (−4ı + 3 j )
= −2 k N m,
(P3.8)
87
donde se ha tenido en cuenta que el producto vectorial de vectores paralelos es
nulo.
O.
(b) Las fuerzas que formen el par han de ser perpendiculares al momento M
Como
O = 0,
(P3.9)
1ı · M
I-
la fuerza 1ı N podrá ser efectivamente una de las fuerzas del par.
AT
Sistema de fuerzas distribuidas
EU
3.11
(c) Si la segunda fuerza del par, −1ı N, está aplicada sobre el eje OY , su punto
de aplicación tendrá por coordenadas Q(0, y). El momento del par será entonces
AI
par = OQ
× (−ı ) = y j × (−ı ) = y k.
M
(P3.10)
par resulta entonces y = −2 m.
O y M
Igualando M
AD
Por tanto, el sistema de fuerzas original puede reducirse a las siguientes tres fuerzas
equivalentes:
LIC
f1 = (16, 18) N, sobre una recta que pase por (0, 0) m,
f2 = (1, 0) N, sobre una recta que pase por (0, 0) m,
f3 = (−1, 0) N, sobre una recta que pase por (0, −2) m.
(d) Al ser las fuerzas f1 y f2 concurrentes en el punto O pueden reemplazarse por
su suma, con lo que el sistema puede reducirse también al sistema de fuerzas
AP
f1∗ = (17, 18) N, sobre una recta que pase por (0, 0) m,
f2∗ = (−1, 0) N, sobre una recta que pase por (0, −2) m.
CA
(e) Para que el sistema inicial de fuerzas pueda reducirse a una única fuerza equi min = 0 y, por tanto, que M
O · R
= 0, con R
= 0. En
valente se requiere que M
nuestro caso dicha condición se satisface, pues se trata de un sistema de fuerzas
coplanarias con resultante no nula.
La fuerza que sea equivalente al sistema completo ha de tener la misma resultante
y momento que el sistema completo. Por tanto,
FIS
I
= (16, 18) N.
Ftot = R
(P3.11)
Si suponemos que la fuerza está aplicada en un punto T del eje OX, de coordenadas
T (x, 0), el momento de la fuerza habrá de ser
O (Ftot ) = OT
× Ftot = 18xk = −2 k N m,
M
(P3.12)
O = −2 k N m. Resulta entonces x = − 1 m.
pues M
9
TO
.
En resumen, el sistema de fuerzas inicial puede sustituirse por la fuerza Ftot aplicada
en el punto T (− 91 , 0) m, o en cualquier otro punto de su recta de acción.
DP
(f) Puesto que el sistema es equivalente a una única fuerza aplicada en el punto T ,
el momento del sistema en dicho punto T es nulo y, consecuentemente, mı́nimo.
Por tanto, el punto T pertenece al eje central. Por otro lado, el eje central es
paralelo a la resultante, con lo que la ecuación de la recta del eje central resulta
ser
x + 19
y−0
=
,
(P3.13)
16
18
donde las coordenadas están expresadas en metros.
Fuerzas aplicadas a un sólido rı́gido
z
AT
88
z
O
D
O
y
x
D
EU
z
y
x
C
B
F1 = 100 N
I-
A
AI
B
A'
C
Mpar 1,2 = 10 N m
37o
37o
y
F3 = 5 0 N
A
F1 = 100 N
OD = DC = CA = 1/3 m
AB = A'B' = 1/5 m
AA' = BB' = 1/10 m
(b)
(c)
LIC
(a)
AD
A
D
x
C
F2 = F1 = 100 N
B'
O
F4 = 5 0 N
PROBLEMA RESUELTO 3.4:
AP
FIGURA 3.24:
CA
En la fig. 3.24 (a) se muestra una tuberı́a acodada anclada a un depósito por el
punto O. En su extremo A se ha colocado un codo que ya está prácticamente
enroscado y que se está asegurando aplicando una fuerza de módulo F1 = 100 N
a una llave.
(a) Calcula el momento de dicha fuerza en el punto A.
FIS
I
(b) Calcula el sistema fuerza-par equivalente en el punto O.
Se aplica a continuación una fuerza F2 de 100 N en el extremo de una nueva llave
anclada en el punto A tal y como se muestra en la fig. 3.24 (b).
DP
TO
.
(c) Determina el sistema fuerza-par equivalente en el punto A y en el punto O.
A continuación, se aplican dos fuerzas más, F3 y F4 , ambas de módulo 50 N, como
se observa en la fig. 3.24 (c). En esta nueva situación:
(d) Calcula el sistema fuerza-par equivalente en O.
(e) ¿Es posible reducir el sistema de fuerzas aplicadas a una fuerza única? En
caso afirmativo, halla el punto del plano OXY donde se puede aplicar una
sola fuerza F5 que anule al anterior sistema, y el valor de dicha fuerza. Explica
cómo podrı́a aplicarse a la tuberı́a.
Nota: Considera cos 37◦ = 45 , sen 37◦ = 35 .
Sistema de fuerzas distribuidas
89
AT
3.11
EU
Solución:
(a) Observamos a partir de la fig. 3.24 (a) que
A (F1 ) = AB
× F1
M
= 0,2ı × 100 j
= 20 k N m.
I-
(P4.1)
AD
AI
(b) El efecto de F1 en A es equivalente a una fuerza Ftot aplicada en O de
par es igual
componentes iguales a las de F1 y un par cuyo momento de par M
a MO = OB × F1 . Ası́, de la figura, y viendo que el punto B tiene de coordenadas
8 1
B( 15
, 3 , − 13 ) m, obtenemos
Ftot = F1 = (0, 100, 0) N,
(P4.2)
100
160
, 0,
) N m,
3
3
(P4.3)
AP
=(
LIC
que expresa una tendencia a la traslación según el eje OY , y además,
ı j k par = M
O = 8 1 − 1 M
3 15 3
0 100 0 que expresa la tendencia a la rotación.
CA
(c) Como es F2 = −F1 = (0, −100, 0) N, el sistema de fuerzas F1 , F2 forman un
par, cuyo momento tiene el mismo valor en todos los puntos del espacio. Ası́, tanto
en A como en O, el sistema fuerza-par equivalente estará formado únicamente por
una par de fuerzas cuyo momento de par sea
FIS
I
par = B B × F1
M
= −0,1 k × 100 j
= (10, 0, 0) N m.
(P4.4)
No es necesario la aplicación de una fuerza en el punto de reducción, pues
= F1 + F2 = 0,
Ftot = R
(P4.5)
DP
TO
.
Si comparamos este resultado con el obtenido en el apartado (b) observamos que
la aplicación de las dos llaves tiene ahora un menor efecto mecánico sobre el
conjunto de las tuberı́as. Por un lado, no hay fuerza neta que intente trasladar
el sistema de tuberı́as (Ftot = 0), y por otro no existe momento en dirección z que
intente hacerlas rotar (Mpar z = 0). Sin embargo, la llave AB, que está aplicada
directamente sobre el codo, ejerce un par sobre éste que tiende a hacerlo girar,
enroscándolo sin afectar sensiblemente al resto de las tuberı́as gracias a la aplicación
de la otra llave.
(d) En O el sistema fuerza-par equivalente se compone de una fuerza Ftot con
de las fuerzas aplicadas, y de un par
componentes iguales a las de la resultante R
par igual al momento del sistema en O, M
O . Para calcularlos necesitamos
de M
Fuerzas aplicadas a un sólido rı́gido
AT
90
EU
antes determinar de la fig. 3.24 (c) las componentes de las nuevas fuerzas y sus
momentos en O:
(P4.6)
(P4.7)
AI
I-
F3 = (0, 50 cos 37◦ , 50 sen 37◦ )
= (0, 40, 30) N,
F4 = (−40, 0, 30) N,
× F3
MO (F3 ) = OC
ı j k = 13 13 0 0 40 30 40
) N m,
3
(P4.8)
AD
= (10, −10,
LIC
O (F4 ) = OD
× F4
M
ı j k = 0 13 0 −40 0 30 = (10, 0,
40
) N m.
3
(P4.9)
Ası́, finalmente,
CA
AP
= 0 + F3 + F4
Ftot = R
= (−40, 40, 60) N,
par 1,2 + M
O (F3 ) + M
O (F4 )
Mpar = MO = M
80
= (30, −10, ) N m.
3
(P4.10)
(P4.11)
FIS
I
(e) Este sistema de fuerzas será reducible a una única fuerza si cumple que su
es no nulo y su invariante escalar, M
O · R,
sı́ es nulo. Lo
primer invariante, R,
primero es obvio, y lo segundo lo vamos a comprobar:
O ·R
= −1200 − 400 + 1600 = 0,
M
(P4.12)
luego sı́ es reducible a una única fuerza: Ftot aplicada en el eje central del sistema.
DP
TO
.
Entonces, para anular esa fuerza única equivalente (y por ello para anular el sistema
de partida) habrá que aplicar una fuerza opuesta también en el eje central.
= (40, −40, −60) N.
Ası́, ya sabemos el valor de la fuerza, F5 = −R
Y el punto E(x, y, 0) ∈ OXY donde se aplica lo hallaremos imponiendo que debe
pertenecer al eje central, donde el momento es mı́nimo y, además, nulo en nuestro
caso.
El eje central del sistema se obtiene aplicando el teorema del centro de reducción
O =
entre un punto donde se conoce el momento del sistema (tal como el O: M
(30, −10, 80
)
N
m)
y
un
punto
cualquiera
E
del
eje
central
(donde
también
se
3
conoce el momento, que es el mı́nimo, nulo en nuestro caso):
E + OE
× R,
O = M
M
(P4.13)
Sistema de fuerzas distribuidas
91
AT
3.11
O = OE
× R;
M
(P4.14)
ı j k 80
(30, −10, ) = x y 0 3
−40 40 60 I-
= (60y, −60x, 40x + 40y)
(P4.15)
AI
Ası́, resulta:
30 = 60 y
(P4.16)
−10 = −60 x
80
= 40 x + 40 y.
3
(P4.17)
AD
(P4.18)
LIC
Y el resultado es E( 16 , 12 , 0) m (no necesitaremos usar la ec. (P4.18) porque es
linealmente dependiente de las otras dos).
La manera de aplicar F5 a la tuberı́a, para ası́ anular el sistema de fuerzas sobre ella,
puede ser mediante una llave de longitud 16 m que cumpla las siguientes condiciones:
AP
(i) Que esté agarrada en el punto medio del segundo tramo recto de la tuberı́a,
CD. Ası́, la boca de la llave estará situada en x = 16 m, y = 13 m.
(ii) Que tenga el mango dispuesto en el plano OXY , perpendicular a CD. El
extremo del mango tendrá por entonces por coordenadas x = 16 m, y =
1
1
1
3 + 6 = 2 m.
CA
Sobre el extremo de la llave habremos de aplicar entonces la fuerza F5 .
FIS
I
PROBLEMA RESUELTO 3.5:
En la figura se muestra una viga sobre la que actúan dos sistemas de fuerzas
distribuidas y dos fuerzas puntuales.
TO
.
(a) Halla el módulo F de las fuerzas puntuales y el valor de la carga total Pt de
la distribución triangular si queremos que el sistema completo de fuerzas sea
nulo.
(b) Calcula en ese caso, de dos formas distintas, el centro de fuerzas paralelas
del sistema formado por todas las fuerzas distribuidas.
(c) ¿Es posible reducir el sistema de fuerzas distribuidas a una única fuerza aplicada sobre la viga? En caso afirmativo, calcula el valor y punto de aplicación
de dicha fuerza puntual.
DP
EU
que, en este caso, queda:
Fuerzas aplicadas a un sólido rı́gido
AT
92
Pt
2m
3m
2m
fr = 5 103 N/m
F
I-
PROBLEMA RESUELTO 3.5
EU
F
Pr
AI
Solución:
AD
(a) En la fig. P5a se indica a qué fuerzas se reducen los sistemas de fuerzas distribuidas triangular y rectangular, y cuáles son sus puntos de aplicación. Éstos se
calculan sabiendo que se sitúan en el centroide de la correspondiente superficie de
carga: el centroide del triángulo está a 13 de su base midiendo desde su altura, y el
del rectángulo a 12 de su base.
LIC
La carga total de la distribución rectangular es
Pr = b h = 104 N.
(P5.1)
AP
Nos piden hallar Pt y las fuerzas puntuales F de los extremos de forma que el sistema completo de fuerzas sobre la viga sea nulo. Eso significa imponer las siguientes
condiciones:
F = 0,
(P5.2)
I = 0,
M
(P5.3)
donde hemos elegido el extremo izquierdo I como punto de reducción.
CA
Como todas las fuerzas son (paralelas) verticales y coplanarias, elegimos los ejes
coordenados de la fig. P5a, donde el eje vertical es el IY , el plano IXY es el que
contiene todas las fuerzas que actúan sobre la viga, y el eje perpendicular a ese
plano es el IZ. De esa forma, teniendo en cuenta la figura, las únicas condiciones
escalares no triviales que resultan son las dos siguientes:
Fy = 0 :
DP
TO
.
FIS
I
FIGURA P5a: Resolución del apartado (a).
2F − Pt − Pr = 0.
(P5.4)
MIz :
−Pt 3 − Pr 6 + F 7 = 0.
(P5.5)
Sustituyendo, obtenemos el siguiente sistema de ecuaciones:
2F − Pt − 104 = 0,
7F − 3Pt − 6 × 104 = 0.
(P5.6)
(P5.7)
F = 3 × 104 N,
Pt = 5 × 104 N.
(P5.8)
(P5.9)
Resolviéndolo resulta:
Pt
Pr
+
93
←
←
F
←
7m
←
+
=
xG
7/2 m
←
AD
2F
AI
G
I-
Pt + P r
I
=
F
AT
Sistema de fuerzas distribuidas
EU
3.11
LIC
xG = 7/2 m
FIGURA P5b: Forma gráfica de calcular del centro de fuerzas paralelas del sistema formado por todas las fuerzas distribuidas
AP
(b) La primera forma de calcular el centro de fuerzas paralelas del sistema formado
por todas las fuerzas distribuidas la resumimos en la fig. P5b.
La segunda forma hace uso de la fórmula que determina en general al centro de
fuerzas paralelas, en este caso fijándonos sólo en las dos cargas puntuales equivalentes a las distribuidas en la fig. P5a.
CA
Ası́, el centro de fuerzas paralelas es el punto G(xG , yG ), con:
Pt xt + Pr xr
Pt + Pr
5 × 104 × 3 + 104 × 6
=
6 × 104
7
= m.
2
FIS
I
xG =
Pt y t + Pr y r
Pt + Pr
5 × 104 × 0 + 104 × 0
=
6 × 104
= 0 m.
(P5.10)
TO
.
yG =
(P5.11)
DP
· R=0)
(c) Sı́, por tratarse de un sistema de fuerzas paralelas (⇒ M
de resultante
= 0). La fuerza puntual equivalente Ftot estarı́a aplicada en el eje
no nula (R
central del sistema, del cual conocemos el punto G, y tendrı́a como componentes
Ftot = (0, −6 × 104 ) N, aplicada en G( 7 , 0) m.
las de R:
2
Fuerzas aplicadas a un sólido rı́gido
AT
94
EU
Problemas propuestos
AI
I-
3.1. Sea el sistema de fuerzas sobre un sólido rı́gido de (e) Si no es posible, ¿puede anularse añadiendo además
la figura, cuyos módulos son |F1 | = 4 N, |F2 | = 2 N, un par? ¿Qué valor tendrá éste?
|F3 | = |F4 | = 1 N, sus direcciones las de las aristas corresNota: Considera cos 37◦ = 45 , sen 37◦ = 35 .
pondientes del prisma dibujado en el sólido, sus sentidos
los indicados, y que se aplican en los puntos P1 (2, 2, 3) m,
P2 (0, 0, 3) m, P3 (2, 0, 0) m y P4 (0, 2, 0) m del sólido. Con
esta información:
(b) ¿Cuánto vale el invariante escalar? ¿Cuánto valdrá el
momento del sistema en un punto E del eje central?
LIC
(c) Justifica a partir de lo anterior si el punto de coordenadas P (6, 2, 0) m pertenece al eje central.
AD
(a) Determina la resultante y el momento del sistema en
el origen de coordenadas.
(d) Halla la ecuación del eje central del sistema de fuerzas.
z
P2
F1
F2
P1
←
O
P3
P4
←
F3
y
3.3. La plataforma flotante de embarque de la figura es
aproximada a su lugar de anclaje definitivo mediante cuatro
remolcadores. Cada remolcador ejerce una fuerza de 25 kN
en la dirección representada. Determina:
(a) El sistema fuerza-par equivalente a las fuerzas ejercidas por los remolcadores en el punto O.
(b) El punto del pantalán AB en el que un único remolcador más potente deberı́a empujar a la plataforma para
producir el mismo efecto que los cuatro remolcadores originales. ¿Con qué fuerza deberı́a empujar?
FIS
I
x
CA
F4
AP
←
←
PROBLEMA 3.2
y
PROBLEMA 3.1
30 m
TO
.
3.2. La figura representa una placa triangular rı́gida de peso despreciable sobre la cual se aplica el sistema de fuerzas
SI formado por las fuerzas FA , FB , FC . Sabiendo que los
módulos de las fuerzas son |FA | = |FB | = |FC | = 10 N:
DP
(a) Reduce el sistema SI a un sistema fuerza-par en el
punto B.
(b) Determina una única fuerza FI equivalente al sistema SI en algún punto del lado AB, indicando cuál es ese
punto.
(c) Halla el eje central del sistema SI .
(d) ¿Es posible anular el sistema SI aplicando una única
fuerza en el punto medio del lado AC?
20 m
15 m
20 m
O
A
4m
x
B
45º
60º
50 m
50 m
4m
50 m
4m
PROBLEMA 3.3
4m
95
AT
Problemas propuestos
LIC
(c) Reduce el sistema anterior a una única fuerza equivalente aplicada en el eje OY , indicando claramente las
componentes de la fuerza y las coordenadas de su punto
de aplicación.
AD
AI
I-
EU
3.4. En la figura se muestra el techo en voladizo de un es- de su centro de masa en el sistema de referencia de la figura
3 6
tadio deportivo, que junto a su soporte, se puede considerar son G( 10
, 5 ) m. En las condiciones descritas, el módulo de
de reacción en el apoyo es φ = 550 N.
como un sólido rı́gido de peso 200 kN aplicado en el centro la fuerza φ
de gravedad, de coordenadas G(3, 5) m. En el techo AB se
tiene una fuerza uniformemente distribuida debida a la nie- (a) Determina la fuerza equivalente, F , ejercida por el
ve, de densidad de carga 5/8 kN/m. En el lateral CD actúa viento sobre el panel e indica su punto de aplicación sobre
perpendicularmente una distribución triangular de fuerzas el mismo.
debidas al viento, cuya densidad máxima de carga se produ- (b) Halla el sistema fuerza-par equivalente al sistema de
ce en el punto C, donde su valor es 2/3 kN/m. Finalmente, fuerzas {F , P , φ}
en el punto O.
la tensión del cable en el punto A vale T = 112 kN.
a una fuerza
(c) Reduce el sistema de fuerzas {F , P , φ}
(a) Reduce cada fuerza distribuida a una sola fuerza equi- única aplicada sobre el panel, y determina su punto de
valente, indicando las componentes y punto de aplicación aplicación.
de cada una.
(d) Calcula la ecuación del eje central del sistema de fuer(b) Reduce el sistema formado por las fuerzas distribuidas, zas {F , P , φ}.
el peso y la tensión a un sistema fuerza-par equivalente en
el punto O.
y
200 N/m B
AP
(d) Halla la ecuación del eje central del anterior sistema
de fuerzas.
Nota: Considera cos 53◦ = 35 , sen 53◦ = 45 .
y
A
¬
T
CA
8m
B
C
53
o
O
FIS
I
G (3,5) m
D
4,5 m
G(3/10, 6/5) m
1m
A
O
x
1,2 m
9m
PROBLEMA 3.5
x
DP
TO
.
3.6. Sobre las paredes de un muro homogéneo de 2 kN de
peso
actúa un conjunto de fuerzas distribuidas tal como se
1m
muestra en la figura. La densidad de carga máxima de la
PROBLEMA 3.4
distribución triangular de la izquierda es 80
3 kN/m, la carga
total de la distribución triangular de la derecha vale 20 kN
3.5. La figura representa un soporte publicitario forma- y la densidad de carga de la distribución rectangular es de
do por un panel OB unido rı́gidamente a una estructura 20 kN/m.
metálica. La estructura metálica está apoyada sin rozamiento en A. Sobre el panel actúa frontalmente la fuerza del (a) Calcula las coordenadas del centro de gravedad del
viento, que puede tratarse como una distribución de fuer- muro.
zas triangular, de modo que la densidad de fuerza en la (b) Calcula el sistema fuerza-par equivalente en el punto
zona superior es 200 N/m. El peso del conjunto del panel y B del conjunto de fuerzas formado por el peso del muro y
de la estructura metálica es P = 700 N, y las coordenadas las tres fuerzas distribuidas.
Fuerzas aplicadas a un sólido rı́gido
AT
96
(c) Calcula el momento del sistema en el origen de coordenadas. (Se recomienda que se calcule directamente y,
además, se compruebe a partir del momento en G).
2m
(d) Comprueba que el invariante escalar del sistema es
cero.
B
I-
3.9. Sobre una viga recta horizontal de 10 m de longitud se
aplica el sistema formado por las siguientes fuerzas:
3m
60
Una fuerza puntual de módulo 10 N, aplicada a 1 m
del extremo izquierdo de la viga, cuya dirección forma 53◦ con la viga y la empuja hacia abajo y hacia la
derecha.
0
AI
2.95 m
1m
0
80
aaaaaaaaaaaaaaaaaaaaaa
aaaaaaaaaaaaaaaaaaaaaa
aaaaaaaaaaaaaaaaaaaaaa
PROBLEMA 3.6
AP
LIC
3.7. La placa de cimentación rectangular de la figura soporta las cargas de 6 columnas, cargas que consideraremos
fuerzas puntuales aplicadas sobre la placa en la base cada
columna. Calcula las fuerzas que deben ejercer las columnas
A y B para que el centro del sistema de fuerzas ejercidas por
todas las columnas sobre la placa sea el centro geométrico
de la misma.
Una fuerza distribuida triangular normal a la viga y
orientada hacia abajo, que actúa en la zona de la viga
comprendida entre los 2 m y los 5 m medidos desde el
extremo izquierdo de la viga, y presenta una densidad
de carga máxima de 8 N/m en el punto situado a 5 m
del extremo izquierdo.
AD
A
EU
(c) Razone si es posible reducir el sistema a una única
fuerza equivalente en algún punto del tramo AB.
50 kN
100 kN
x
B
A
30 kN
FIS
I
200 kN
CA
z
y
6m
6m
6m
TO
.
PROBLEMA 3.7
Una fuerza de 16 N normal a la viga y orientada hacia
abajo, distribuida uniformemente en la zona de la viga
comprendida entre los 5 m y los 7 m, medidos desde
el extremo izquierdo de la viga.
Una fuerza puntual de 4 N normal a la viga y orientada hacia abajo, aplicada a 8 m del extremo izquierdo
de la viga.
Considerando la viga como un sólido rı́gido:
(a) Calcula el centro de fuerzas paralelas del sistema formado por las fuerzas distribuidas y la fuerza puntual
de 4 N.
(b) ¿Es posible reducir ese sistema de fuerzas paralelas
a una sola fuerza? En caso afirmativo, calcula su valor y
punto de aplicación.
(c) Reduce el sistema de fuerzas total a un sistema fuerzapar equivalente en el extremo izquierdo de la viga.
(d) ¿Es posible reducir el sistema completo a una sola
fuerza? En caso afirmativo, encuentra a qué distancia del
extremo izquierdo puede aplicarse esa única fuerza equivalente y calcula las componentes de dicha fuerza.
DP
3.8. Un sistema de fuerzas paralelas sobre un sólido rı́gido está constituido por F1 = (1, 2, 3) N, aplicada en el
punto P1 (0, 1, 1) m; F2 = (3, 6, 9) N, aplicada en el pun- Nota: Considera cos 53◦ = 35 , sen 53◦ = 45 .
to P2 (−2, 1, 5) m; y F3 aplicada en el punto P3 (3, 1, 1) m.
3.10. El momento de un sistema de fuerzas sobre un sóli
(a) Determina las componentes de F3 , de forma que el do rı́gido en el punto O (0, 0, 0) es MO = (2, 1, −3) Nm,
centro G del sistema sea el punto de intersección del eje en el punto A (1, 1, 0) m es MA = (0, 3, −1) Nm, y en el
punto B (1, 1, 1) m es MB = (−1, 2, −1) Nm. Halla:
central del sistema con el plano coordenado OY Z.
(b) En este caso, calcula las coordenadas del centro G del
sistema de fuerzas.
(a) La resultante, el invariante escalar y el tercer invariante.
97
(b) El momento mı́nimo del sistema.
AT
Cuestiones
Calcula:
EU
(c) La ecuación del eje central.
(a) La resultante del sistema.
(b) El momento mı́nimo.
3.11. De un sistema de fuerzas sobre un sólido rı́gido se sabe
que
(c) El momento del sistema en el origen de coordenadas O.
el eje central es la recta x = y = z,
I-
(d) El sistema fuerza-par equivalente en O.
(e) El momento del sistema en el punto Q (1, 1, 0) m.
el invariante escalar es 54 N2 m.
(f) El sistema fuerza-par equivalente en Q.
AD
AI
la resultante tiene√todas sus componentes positivas y
su módulo vale 3 3 N,
Cuestiones
3.1. Sea F , de componentes F = (Fx , Fy , 0), una fuerza
aplicada sobre un sólido rı́gido. Entonces su momento en el
punto Q(0, 0, 1)
(a) el momento del sistema en cualquier punto es nulo.
LIC
(b) el momento del sistema es siempre paralelo a la resultante.
(a) es un vector unitario.
AP
(b) tiene módulo igual a la distancia entre Q y la recta de
acción de F .
(c) el momento del sistema es perpendicular a la resultante sólo en puntos del eje central.
(c) es un vector perpendicular al plano que contiene a Q
y a la recta de acción de F .
(d) es un vector que tiene la dirección del eje z.
CA
3.2. Si el momento de una fuerza no nula F que actúa
sobre un sólido rı́gido es igual en dos puntos A y B,
B (F ), entonces, necesariamente,
A (F ) = M
M
FIS
I
tiene la misma dirección que F .
(a) el vector AB
(b) A y B están en la recta de acción de F .
(c) la distancia entre A y B coincide con el módulo de F .
(d) A y B coinciden.
(d) Ninguna de las otras afirmaciones es necesariamente
cierta.
3.5. Sea un sistema de fuerzas aplicadas sobre un sólido
= 0. Entonces
= 0 y M
P ·R
rı́gido tal que R
(a) el sistema puede reducirse a un conjunto de vectores
paralelos.
(b) el vector momento mı́nimo es, con toda seguridad, no
nulo.
(c) existen casos particulares en los que el sistema se puede reducir a un único vector en puntos del eje central.
(d) el sistema es mecánicamente equivalente a un par de
fuerzas.
TO
.
3.3. Sea F , de componentes F = (Fx , Fy , 0), una fuerza 3.6. Señala la afirmación correcta acerca del momento
aplicada sobre un sólido rı́gido, cuyo momento en el pun- mı́nimo de un sistema de fuerzas aplicadas sobre un sólido
Q (F ) = (0, 0, 1) N m. Entonces, necesariamente rı́gido:
to Q es M
(b) la distancia entre Q y la recta de acción de F es 1 m.
= 0.
O ·R
(a) Para que sea nulo es necesario que M
O · R
= 0.
(b) Para que sea nulo basta con que M
(c) Q pertenece al plano z = 0.
O ·R
= 0.
(c) Para que sea no nulo, es necesario que M
(d) Q pertenece al plano z =constante que contiene a la
recta de acción de F .
(d) Todas las otras respuestas son correctas.
DP
(a) F es un vector unitario.
3.7. Un sistema de fuerzas aplicadas sobre un sólido rı́gi = (1, 2, 1) N, concurre en el pun3.4. Si el invariante escalar de un sistema de fuerzas apli- do, de resultante R
cadas sobre un sólido rı́gido es nulo y la resultante no lo es, to P (0, 2, −1) m. Sea el punto Q(1, 0, 3) m del espacio. Se
entonces
cumplirá que
Fuerzas aplicadas a un sólido rı́gido
AT
98
EU
(a) el punto P es un punto del eje central, pero no el 3.11. Dado un sistema de fuerzas paralelas aplicadas sobre
punto Q.
un sólido rı́gido con resultante no nula, podemos afirmar
(b) el punto Q pertenece al eje central, pero no el pun- con toda seguridad que
to P .
(a) el momento en cualquier punto es nulo.
3.8. Si a un sistema no nulo de fuerzas aplicadas sobre un
sólido rı́gido se le añade cierta fuerza y se convierte en un
sistema nulo, podremos afirmar del sistema de partida que
(a) tenı́a invariante escalar no nulo.
(b) existe una infinidad de puntos en el espacio en los que
el momento del sistema es nulo.
I-
(d) ni el punto P ni el punto Q pertenecen al eje central.
(c) el centro del sistema es justamente el único punto en
el cual el momento del sistema es no nulo.
AI
(c) ambos puntos P y Q pertenecen al eje central.
(d) la resultante es perpendicular al eje central del sistema.
3.12. En una viga rı́gida horizontal de 12 m de longitud se
distribuyen 104 N de carga en los primeros 3 m, y otros
(c) tenı́a resultante no nula pero momento nulo en todos
104 N de carga en los restantes 9 m, siendo ambas distribulos puntos del espacio.
ciones de carga triangulares, como se muestra en la figura.
(d) era reducible a una sola fuerza deslizante.
Entonces, la carga total sobre la viga se puede reducir a
una carga puntual de valor 2 × 104 N aplicada
3.9. Sea un sistema de fuerzas aplicadas a un sólido rı́gido,
= 0, y momento en un punto del eje cen- (a) a 3 m del extremo izquierdo de la viga, donde termina
de resultante R
tral ME = 0. Podemos afirmar que es posible anular ese una carga y comienza la otra.
sistema si se le añade
(b) a 5,5 m del extremo izquierdo de la viga.
(a) una única fuerza deslizante cuyas componentes coin- (c) en el centro de la viga.
aplicada en un punto del eje central.
ciden con las de −R,
(d) en cualquier punto de la viga.
E.
(b) un par de momento −M
AP
LIC
AD
(b) era equivalente a un par de fuerzas.
CA
(c) una única fuerza deslizante cuyas componentes coin aplicada en un punto P , no necesaciden con las de −R,
riamente del eje central.
(d) Todas las otras respuestas son falsas.
FIS
I
3.10. Sea un sistema de N fuerzas aplicadas sobre un sólido
rı́gido. Tras efectuar operaciones que nos permiten reducirlo
obtenemos un sistema equivalente al de partida, integrado
sólo por DOS fuerzas. Señala la afirmación falsa.
I
3m
9m
D
CUESTIÓN 3.12
TO
.
3.13. En la figura se muestra un sistema material formado
(a) Si las dos rectas de acción se cruzan (no se cortan) por un cuadrado y un cuadrante circular, ambos de igual
en el espacio, siempre es posible la reducción del sistema masa. Sea E1 y E2 ejes de simetrı́a del cuadrado y del
cuadrante, respectivamente. Entonces,
a una única fuerza.
(b) Si las dos rectas de acción se cortan en un punto único, siempre es posible la reducción del sistema a una sola
fuerza.
DP
(c) Si las dos rectas de acción son paralelas y las fuerzas
tienen distinto módulo, siempre es posible la reducción del
sistema a una única fuerza.
(d) Si las dos rectas de acción son paralelas y los módulos
de las fuerzas coinciden, continuar reduciendo el sistema
puede NO ser posible.
(a) el centro de masa del conjunto está ubicado en el punto de intersección de ambos ejes.
(b) el conjunto de los dos cuerpos carece de centro de
masa, pues no posee ningún eje de simetrı́a global, pero
sı́ posee centro de gravedad.
(c) el centro de masa está situado en la lı́nea de contacto
entre los dos cuerpos, pues sus masas son idénticas.
(d) Ninguna de las otras respuestas es correcta.
99
(c) G(− 13 , 0) m.
(d) G( 13 , 0) m.
E1
I-
y
FIS
I
CA
AP
LIC
(a) G(−1, 0) m.
AD
3.14. Sea la placa cuadrada homogénea de la figura, de 8 kp
de peso. Si le quitamos la porción menos sombreada, el
nuevo peso de la placa, de módulo 6 kp, se aplicará en el
punto
2 2m
AI
CUESTIÓN 3.13
TO
.
EU
(b) G(1, 0) m.
E2
DP
AT
Cuestiones
CUESTIÓN 3.14
x