2.2.1. Redes de ´Area Personal o PAN (Personal Area Net
Anuncio

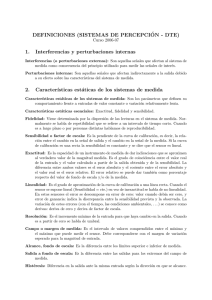
Grupo 802.1 802.3 802.8 802.11 802.15 802.16 Temática Protocolos de nivel superior en LANs Ethernet Tecnologı́as de Fibra Óptica Redes de Área Local Inalámbricas(WiFi) Redes de Área Personal Inalámbricas (Bluetooth, ZigBee) Redes de Área Metropolitana Inalámbricas (WiMAX) Tabla 2.2: Principales grupos de trabajo de la IEEE. [22, 52, 99] A continuación se presentan los conceptos fundamentales de las redes utilizadas en el sistema de telemonitorización. 2.2.1. Redes de Área Personal o PAN (Personal Area Network) Tienen una cobertura limitada, alrededor de unos pocos metros. Este tipo de redes se implementan para interconectar dispositivos como PDAs, celulares, computadores portátiles, etc. Sus tasas de transmisión se encuentran entre los 10 bps hasta los 10Mbps. El grupo de trabajo IEEE 802.15 es el encargado del estudio de las redes WPAN o Wireless-PAN. Las implementaciones más importantes de redes PAN se basan en enlaces infrarrojos (IrDA-Infrared Data Association), Bluetooth y ZigBee. Este tipo de redes se caracterizan por su baja complejidad en su diseño, bajos costos y reducido consumo de potencia. [22] A continuación se identifican las principales caracterı́sticas de Bluetooth, tecnologı́a de transmisión utilizada en el proyecto para implementar una red WPAN. Bluetooth: El área de cubrimiento es de 10 a 15 metros aproximadamente. Esta especificación industrial elimina el uso de cables entre dispositivos que se encuentren en un área limitada, permitiendo la transmisión de voz y datos en un sistema de comunicación basado en picored o piconets (unidad básica del sistema Bluetooth13 ), conformada por un nodo maestro y hasta 7 nodos esclavos. Adicionalmente pueden haber 254 dispositivos esperando 13 Diseñado por SIG (Bluetooth Special Interest Group http://www.bluetooth.com/ bluetooth/), grupo fundado por Ericsson, IBM, Intel, Nokia, y Toshiba en 1994. 13 a unirse a la picored. Bluetooth opera con bajos niveles de potencia, la mayor parte de los dispositivos comerciales transmiten a 1 o 10mW, en la banda de 2.4GHz con una modulación por desplazamientos de frecuencias. El ancho de banda pueden ser de 721 Kbps en una dirección y 57.6 Kbps en el otro sentido para una configuración asimétrica, o de 432.6 Kbps en ambas direcciones para una configuración simétrica. En la última versión (v2.0) se alcanzan anchos de banda de 2.1 Mbps. Figura 2.9: Arquitectura de la pila de protocolos de Bluetooth [109]. En la pila de protocolos del estándar Bluetooth (Ver Figura 2.9) encontramos RFCOMM, el cual emula un puerto serial y permite la implementación del protocolo Point to Point Protocol (PPP) o el manejo de comandos AT para el establecimiento de comunicaciones por internet. [1, 26, 49, 56, 64, 88, 99, 105] 2.2.2. Redes de Área Local o LAN (Local Area Network) Su alcance cubre unos cuantos kilómetros, aproximadamente de 10 m a 10 Km. Generalmente son redes privadas implementadas para compartir recursos. Se distinguen por: Su tamaño: Al estar restringido se tienen tiempos de transmisión limitados y conocidos. 14 Tecnologı́a de transmisión: las LAN operan de 10 a 100M bps. Tienen un bajo retardo, del orden de microsegundos(µs) o nanosegundos(ns). Las nuevas LAN funcionan hasta 10Gbps. Topologı́a: en las LAN alambradas de difusión. Se encuentran dos principales topologı́as: bus (Ejemplo: Ethernet-IEEE 802.3) y anillo (Ejemplo: Token Ring de IBM-IEEE 802.5). Las redes inalámbricas de área local o WLAN trabajan con el estándar IEEE 802.1114 , en el cual se encuentran tanto las especificaciones de la capa fı́sica como de la capa de control de acceso al medio “MAC”. Una de las tecnologı́as de mayor uso que trabajan con este estándar es WiFi. Estas redes operan con anchos de banda entre 2 y 10 Mbps, menores que las ofrecidas con las LAN alambradas. A continuación se presentan las caracterı́sticas de las redes LAN (Ethernet) y WLAN (WiFi), utilizados en el sistema de telemonitorización. Ethernet: es la red LAN de mayor uso a nivel mundial, está descrita en el estándar IEEE 802.3, el cual se definen caracterı́sticas de la capa fı́sica y de la capa de enlace de datos, como son el tipo de cableado, la señalización y las tramas de los datos. Ethernet es un conjunto de tecnologı́as LAN que puede operar con anchos de banda desde los 10M bps hasta los 10Gbps en las últimas versiones. Un aspecto muy importante en estas redes es el método usado para acceder al medio, que se denomina CSMA/CD (Acceso Múltiple por Censado de Portadora con Detección de Colisiones) [24]. WiFi: es una tecnologı́a de WLAN basada en las especificaciones del estándar IEEE 802.1115 . Es una de las tecnologı́as más comunes para las conexiones de los computadores portátiles con las redes alambradas. WiFi generalmente se usa para referirse a las redes del estándar 802.11(b, a, g, n, . . . ). Las redes modernas, como las diseñadas con el estándar 802.11n, operan con anchos de banda cercanos a los 108Mbps. [1, 47, 61] 14 Un aspecto sensible en este tipo de redes es la seguridad, para lo cual se implementan algunos protocolos de cifrado de datos entre los que tenemos WEP (Wired Equivalent Privacy), WPA (Wi-Fi Protected Access), o WPA2 (Wi-Fi Protected Access 2). 15 WiFi surge como una iniciativa realizada por “Wireless Ethernet Compatibility Alliance (WECA), la cual fue creada por Nokia y Symbol Technologies en 1999, en el 2003 paso a denominarse Wi-Fi Alliance, la página principal es http://www.wi-fi.org/)”. 15 2.2.3. Redes Celulares Se enmarcan en el alcance de las redes WANs. Comprenden áreas extensas como paı́ses y continentes. En la prestación de los servicios de Telemedicina se busca tener acceso a este tipo de redes porque permiten eliminar las barreras geográficas en la atención de los pacientes. Constituye la principal red a implementar en el sistema de telemonitorización de señales biomédicas propuesto, fundamentalmente por el amplio cubrimiento en el territorio nacional, además de ofrecer condiciones técnicas apropiadas para la transmisión de las señales biomédicas. CELDAS BTS BTS BSC Otras Redes BTS BTS MS BTS MSC BTS BTS BSC Figura 2.10: Esquema general de las redes celulares. El funcionamiento del sistema de telefonı́a móvil se basa en la división del terreno a cubrir con celdas teóricamente hexagonales (Ver Figura 2.10), motivo por el cual recibe el nombre de Red Celular. Este esquema permite la reutilización de frecuencias en celdas no contiguas. Cada celda esta asociada a una Estación Base (BTS-Base Transceiver Station) responsable de establecer la comunicación con la Estación Móvil (MS-Mobile Station), la cual puede ser un celular, un módem GSM, un PC portátil, etc. [61,83,91,99] 2.3. Sistemas Embebidos Son sistemas Hardware/Software de propósito especı́fico, diseñado para realizar una o más actividades. Esto permite su optimización con el objetivo de mejorar el desempeño, eficiencia y confiabilidad, teniendo la posibilidad de reducir el tamaño y costo de producción. 16 Estas caracterı́sticas hacen a los sistemas embebidos herramientas tecnológicas útiles en el desarrollo de dispositivos médicos para la telemonitorización de señales biomédicas. [46] Las principales diferencias de los sistemas embebidos con los computadores personales son [19, 82]: El costo de producción es bajo. Pueden ser implementados en diferentes arquitecturas de procesadores. Su desarrollo implica un diseño particular de hardware y software, con el objetivo de satisfacer la tarea especı́fica que se desea cumplir. Poseen recursos limitados de hardware, por ejemplo: en cuanto a la memoria RAM, ROM y al manejo de los dispositivos de Entrada/Salida (E/S). En los sistemas embebidos el consumo de potencia es un aspecto muy importante, porque permiten implementar soluciones con bajos consumos de energı́a. Generalmente, los sistema embebidos poseen restricciones de tiempo, motivo por el cual, gran parte del estudio se enfoca al desarrollo de Sistemas de Tiempo Real. A continuación se presentan los componentes principales que integran la arquitectura de estos sistemas. 2.3.1. Hardware Los tres principales componentes de un sistema embebido son: Unidad de Procesamiento Los sistemas embebidos basan su implementación en un amplio rango de arquitecturas de procesadores, que pueden ser microprocesadores o microcontroladores, entre las que se encuentran: ARM [5], AVR, x86, MIPS, Hitachi SuperH, IBM/Motorola PowerPC, Motorola 68000 y Blackfin. En el Apéndice C se especifica la información básica de estas arquitecturas. Una de las más importantes arquitecturas de procesadores en los Sistemas Embebidos es la ARM. Esto se debe principalmente a [55]: 17 Su arquitectura es abierta. Se dispone de gran cantidad de información para los usuarios o diseñadores, entre las que se encuentran manuales, guı́as de usuario y especificaciones técnicas. Se utilizada en un amplio rango de aplicaciones (Ejemplo: PDAs, Celulares, Cámaras Digitales e Impresoras). Es una arquitectura moderna con una amplia gama de soportes en la interconexión de periféricos. Estos criterios determinaron la seleccionada de esta arquitectura de procesadores para el desarrollo de la tesis. A continuación se presenta la información principal de los procesadores ARM. [29, 33, 110] ARM (Advanced RISC Machines) [55, 109, 110]: 16 es una familia de procesadores RISC (Reduced Instruction Set Computer) diseñado por Acorn Computers y desarrollado por Advanced RISC Machines Ltd. En desarrollo de la tesis se utilizó el núcleo ARM920T de la familia de procesadores ARM9TDMI17 . En el Apéndice C, Figura C.1 se presenta el diagrama de bloques de la arquitectura interna de este núcleo. Dispositivos de Almacenamiento Los sistemas embebidos necesitan tener uno o varios dispositivos de almacenamiento de información para inicializar el sistema, ejecutar los programas y administrar los recursos. Los dispositivos de almacenamiento se pueden clasificar como: a. Memorias Volátiles: [62] son dispositivos que requieren estar constantemente energizados para mantener la información almacenada. Generalmente son utilizadas como memorias de acceso aleatorio (RAM), principalmente por el bajo tiempo de acceso de lectura/escritura. Algunos ejemplos de este tipo de memorias son: SRAM o RAM estáticas, DRAM o RAM dinámica y SDRAM (Synchronous Dynamic Random Access Memory), la cual es una memoria DRAM con interfaz sincrónica y es la que más se utiliza en los sistemas embebidos. 16 La página web de ARM es http://www.arm.com/. La lista completa de las arquitecturas y núcleos puede consultarse en la página http: //www.arm.com/products/processors/index.php 17 18 b. Memorias no Volátiles: son dispositivos que almacenan información por largos perı́odos de tiempo, ası́ no estén energizados. Algunos ejemplos de estos dispositivos son: DVD, Disco duro, memorias EPROM (Erasable Programmable Read-Only Memory), flash (Tipo NOR o NAND) [19, 82, 110], NVRAM (Non-volatile random access memory) y ROM (Read Only Memory)18 . Periféricos Estos dispositivos se emplean principalmente para adquirir, transmitir y almacenar la información de los procesos realizados en el sistema. [20, 82, 86, 110] Algunos de los periféricos, interfaces y buses que pueden ser usados son: Interfaces de comunicación serial o SCI (Serial Communication Interfaces): RS-232, RS-422, RS-423, RS-485. Generalmente se emplea un puerto RS-232 para realizar las actividades de desarrollo y depuración entre el host y el sistema embebido. Interfaces de comunicación serial sincrónicas: I2 C (Inter Integrated Circuit), SPI (Serial Peripheral Interface Bus) y ESSI (Enhanced Synchronous Serial Interface). Dispositivos de comunicación: modems, tarjetas de red (Ethernet), tarjetas inalámbricas. Puertos: USB (Universal Serial Bus), paralelos, ISA (The Industry Standard Architecture), PCI (The Peripheral Component Interconnect), PCMCIA (Personal Computer Memory Card International Association), GPIO (General Purpose Input/Output), IEEE1394 (FireWire). Conversores Análogos/Digitales o Digitales/Análogos (ADC/DAC), monitor, pantalla táctil, teclado y ratón. Componentes de depuración: soporte JTAG (Joint Test Action Group), ISP (In-system programming), ICSP (In Circuit Serial Programming), interfaz BDM (Background Debug Mode). 18 En los sistemas embebidos generalmente se usa la memoria ROM para almacenar el firmware, el cual es un programa de propósito especı́fico ligado al hardware que funciona como una interfaz para controlar la electrónica del dispositivo, con el objetivo de realizar correctamente las instrucciones externas que recibe. 19 Controladores para memorias: Compact Flash, NAND flash, DataFlash, SDRAM, SD/MMC. Es importante aclarar que uno de los aspectos que varı́a con frecuencia entre los diferentes sistemas embebidos es el manejo de los dispositivos de E/S, interfaces y/o buses. 2.3.2. Software En estos sistemas se implementa un Sistema Operativo Embebido, diseñado para ser compacto y eficiente, capaz de administrar los recursos y permitir la comunicación hardware/software con el fin de realizar las tareas especı́ficas para las que está diseñado. Algunos de los principales S.O. Embebidos son: Symbian OS: 19 diseñado para dispositivos móviles y celulares, opera con licencia Nokia Symbian bajo un modelo de código compartido, es decir es Software propietario. Soporta arquitecturas ARM y es compatible con x86. Windows CE (Microsoft Windows CE)20 : Software propietario que opera con una licencia MS-EULA. Soporta la plataforma x86 y es compatible con arquitecturas de procesadores MIPS y ARM. [98]. Palm OS (Garnet OS)21 Software propietario que opera con una licencia EULA, utilizado en las PDAs (Personal Digital Assistants). Soporta arquitecturas ARM. Linux embebido22 las principales ventajas de utilizar este S.O. con respecto a los otros son [19, 109]: • Existe gran cantidad de información, software y soporte en lı́nea. • Es libre su código fuente, está disponible (código abierto). • Se tiene independencia del vendedor. • Es estable y pequeño(ocupa alrededor de 2MB). • Ofrece portabilidad del código y 19 La página web de Symbian es: http://symbian.nokia.com/ La página web de Windows CE es: http://www.microsoft.com/windowsembedded/ en-us/windows-embedded.aspx 21 La página web de Garnet OS es:http://www.access-company.com/products/ platforms/garnet/index.html 22 La página web de Linux Embebido es: http://elinux.org/Main_Page 20 20 • Soporte a una gran variedad de hardware entre las que se encuentra ARM, MIPS, x86. Estas ventajas son las principales motivaciones por las cuales se emplea el Linux embebido en el desarrollo de la tesis. A continuación se presenta las principales caracterı́sticas de este S.O.. Linux Embebido Corresponde al uso del sistema operativo Linux en el sistema embebido23 , de tal forma que se pueda implementar el kernel o núcleo de Linux junto con otras utilidades o herramientas del software libre en el limitado espacio disponible24 . Actualmente, existen varias distribuciones que pueden ser implementadas en los sistemas embebidos, entre la que se encuentran: Ångström distribution, Openembedded, Embedded Debian, OpenZaurus, BlueCat, SlugOS, MontaVista, RTLinux, Maemo (basado en Debian), Openmoko Linux y Android [2, 77, 80, 82, 110]. Arquitectura del Sistema de Linux Embebido La estructura de estos sistemas es similar a cualquier arquitectura de un Linux genérico, fundamentalmente por estar diseñados al mismo nivel de abstracción. En la Figura 2.11 se muestra una arquitectura general para estos sistemas, identificando en una forma muy resumida sus principales componentes. [19, 76, 78, 82, 100, 110] El kernel es el componente fundamental del Sistema Operativo, su principal tarea es administrar el hardware, de tal forma que ofrezca a las aplicaciones de nivel de usuario un nivel de abstracción elevado que facilite su manipulación, por ejemplo mediante la implementación de APIs (Application Programming Interface). Algunas de las actividades que realiza son: manejar los dispositivos, controlar los accesos de E/S, administrar los procesos y el manejo de la memoria compartida. 23 Algunas de las ventajas que ofrece el uso del Linux embebido son: existe gran cantidad de información, software y soporte en lı́nea, es libre su código fuente, está disponible (código abierto), se tiene independencia del vendedor, es estable y pequeño(ocupa alrededor de 2MB), ofrece portabilidad del código y soporte a una gran variedad de hardware. 24 No es necesario desarrollar un kernel especial para el sistema embebido, se pueden emplear los kernel oficiales de Linux, realizando las modificaciones necesarias para ser integrado al sistema. 21 APLICACIÓN LIBRERÍAS Kernel Abstracción de Alto Nivel Sistema de Protocolos Archivos de Red Interfaz de Bajo Nivel HARDWARE Figura 2.11: Arquitectura general de un Sistema de Linux Embebido. [110] Como se identifica en la Figura 2.11 el Kernel básicamente se compone de: una Interfaz de Bajo Nivel 25 , en la que se gestionan y controlan directamente los recursos de hardware, unos Componentes de alto nivel o “Abstracción de Alto Nivel”, que generalmente es independiente del hardware y provee abstracciones comunes a todos los sistemas Unix, incluyendo procesos, archivos, sockets y señales, y entre estos dos niveles se encuentran los Componentes de interpretación que captan e interactúan con las estructuras de datos recibidas o transmitidas por los dispositivos. Los tipos de sistemas de archivos (FAT32, NTFS, EXT2, EXT3, EXT4 . . . ) y los protocolos de red son ejemplos de estructuras de datos. Cuando el kernel se encuentra operando, requiere manejar una estructura adecuada del sistema de archivo, que se denomina Root Filesystem o Sistema de Archivos Raı́z, cargado al momento del arranque del sistema operativo, que es una estructura de directorios jerárquicos en forma de árbol, donde se almacenan las aplicaciones, librerı́as y archivos relacionados con los programas ejecutados. En el Root Filesystem el directorio principal se denomina Root y se simboliza por / . El nivel de abstracción ofrecido por el 25 La interfaz de Bajo Nivel es especifica para cada una de las arquitecturas de Hardware que se estén usando, por ejemplo: es diferente el manejo de la memoria para las arquitecturas de procesadores MIPs y ARM. 22 kernel aún no es adecuado para la ejecución de las aplicaciones, es necesario la implementación de librerı́as y programas Demonios (Deamons) en el nivel de usuario que ofrezcan, por ejemplo, APIs capaces de interactuar con el Kernel y a su vez ofrecer la funcionalidad deseada. Algunas librerı́as son: Qt, XML, MD5, µClibc y GNU C (Principal librerı́a usada en los sistemas embebidos). Herramientas de Desarrollo En el diseño de los sistemas embebidos, generalmente, es necesario el uso de un computador que ofrezca las herramientas de hardware y software necesarias para el desarrollo, eliminando las limitaciones existentes. De esta forma, se busca implementar una plataforma acondicionada para la creación, compilación y prueba de los programas o componentes de software que se necesiten incorporar al sistema. Este tipo de herramientas se denominan plataformas cruzadas de desarrollo (Cross-Platform Development Tools) y contienen compiladores, sistemas de enlace (Linkers), interpretes, ambientes de desarrollo integrados, etc. Estas plataformas se basan en la compilación cruzada26 , que consiste en crear o generar un código ejecutable para el sistema embebido en un computador personal denominado Host, permitiendo separar el entorno de desarrollo. 2.4. Marco Legal Para evitar o minimizar los riesgos que pueda presentar un dispositivo médico para la telemonitorización de señales biomédicas, es de vital importancia considerar los requerimientos contenidos en las normas técnicas durante todo el proceso de diseño. Esto permitirá, a su vez, una reducción tanto en el tiempo como en los costos de fabricación al momento de la comercialización del equipo. Un diseño minucioso garantiza la detección temprana de errores o fallos, que de otra forma habrı́an surgido al final del proceso. A continuación se presentan las normas más relevantes que están ligadas a este tema. (La información contenida en esta sección se basa en el reporte técnico “Marco Legal de los Dispositivos Médicos en Colombia”, realizado en el proceso de desarrollo de la Tesis, el cual se encuentra en el CD.) 26 Para realizar la compilación cruzada es necesario instalar, las librerı́as (ejemplo: glibc), el compilador (ejemplo: gcc) y los Binutils (colección de herramientas de programación). 23 2.4.1. Normas Nacionales Las normas NTC-IEC 60601 homologadas por el ICONTEC para el ámbito nacional estandarizan los dispositivos médicos, principalmente en los temas de seguridad que garanticen un funcionamiento óptimo y adecuado de estos equipos en el campo de la medicina. En la Figura 2.12 se resaltan las normas aplicables a los dispositivos diseñados para la telemonitorización de las señales biomédicas, entre las que se encuentra la NTC-IEC 60601-1, la cual corresponde a la norma base o principal donde se especifican los requerimientos generales de seguridad. [51]. Figura 2.12: Normas NTC-IEC 60601, homologadas por el ICONTEC, aplicables a los dispositivos de telemonitorización. A continuación se presenta el objeto y/o aplicación extraı́dos de cada una de las normas. NTC-IEC 60601-1 EQUIPO ELECTROMÉDICO. PARTE 1: REQUISITOS GENERALES PARA LA SEGURIDAD: “El objeto de esta norma es el de especificar los requisitos generales para la seguridad de los equipos electromédicos y servir de base para los requisitos de seguridad de las normas particulares.” Esta norma presenta aspectos de seguridad tales como: las pruebas que se deben realizar a un equipo para su funcionamiento, los fallos en componentes electrónicos a evitar, las protecciones de tierra que se be24 ben tener, la aparición de tensiones eléctricas en las señales, presencia de tensiones eléctricas en los componentes que tienen contacto con el paciente, fallos en componentes mecánicos, condiciones de aislamiento y especificaciones de los mandos de control. En la Tabla 2.3 se identifican las medidas a realizar según la norma NTC-IEC 60601-1, con sus respectivos valores de referencia, para garantizar la seguridad eléctrica en el funcionamiento de este tipo de dispositivos. Medida Tensión de Red Corriente de Fuga a Tierra Condición de Primera Falla Corriente de Fuga al Chasis Condición Primera Falla Condición Segunda Falla Corriente Fuga Eléctrica Paciente a Tierra Condición Primera Falla Condición Segunda Falla Condición Tercera Falla Corriente Auxiliar Eléctrica Partes Aplicables Condición Primera Falla Condición Segunda Falla Condición Tercera Falla Resistencia a Tierra Unidad VAC µA µA µA µA µA µA µA µA µA µA µA µA µA Ohmios Valor 117,0 ≤ 500 ≤ 1000 ≤ 100 ≤ 500 ≤ 500 ≤ 10 ≤ 10 ≤ 10 ≤ 10 ≤ 10 ≤ 50 ≤ 50 ≤ 50 ≤ 0,2 Tabla 2.3: Especificaciones técnicas en seguridad eléctrica según la norma NTC-IEC 60601-1 NTC-IEC 60601-1-1 EQUIPOS ELECTROMÉDICOS. PARTE 1: REQUISITOS GENERALES DE SEGURIDAD. SECCIÓN 1: Norma Colateral. Requisitos De Seguridad Para Sistemas Electromédicos: “Esta norma se aplica a la seguridad de Sistemas Electromédicos. Describe los requisitos de seguridad para Sistemas Electromédicos con el fin de asegurar la protección del PACIENTE, del OPERADOR y del entorno. Se supone que las partes encargadas del montaje o modificación de los Sistemas Electromédicos deben tomar las medidas necesarias para asegurar la conformidad con esta norma.” NTC-IEC 60601-1-2 EQUIPOS ELECTROMÉDICOS. PARTE 1-2: REQUISITOS GENERALES DE SEGURIDAD. Norma Colateral. Compatibi- 25 lidad Electromagnética. Requisitos Y Ensayos: “Esta norma especifica los requisitos y ensayos relacionados con la Compatibilidad Electromagnética de Equipos y/o Sistemas, y sirve como base de posibles requisitos adicionales de Compatibilidad Electromagnética y de Normas Particulares.” NTC-IEC 60601-1-4 EQUIPOS ELECTROMÉDICOS. PARTE 1: REQUISITOS GENERALES PARA LA SEGURIDAD SECCIÓN 4: Norma Colateral. SISTEMAS ELECTROMÉDICOS PROGRAMABLES: “Esta Norma Colateral se aplica a la Seguridad de los Equipos Electromédicos y de los Sistemas Electromédicos que incorporan SUBSISTEMAS ELECTRÓNICOS PROGRAMABLES (SSEP), a los que de ahora en adelante nos referiremos como Sistemas Electromédicos Programables (SEMP).” NTC-IEC 60601-2-25 EQUIPOS ELECTROMÉDICOS. PARTE 2: REQUISITOS PARTICULARES PARA LA SEGURIDAD DE ELECTROCARDIÓGRAFOS: “El objeto de esta norma particular es especificar los requisitos particulares de seguridad de los equipos para la vigilancia de la presión sanguı́nea de funcionamiento automático, cı́clico e indirecto, prestando especial atención a la prevención de riesgos debidos al proceso de inflado.” NTC-IEC 60601-2-27 EQUIPOS ELECTROMÉDICOS. PARTE 2: REQUISITOS PARTICULARES PARA LA SEGURIDAD DE EQUIPOS DE SUPERVISIÓN ELECTROCARDIOGRÁFICA: “Esta norma especifica los requisitos particulares referentes a la seguridad de equipos de supervisión electrocardiográfica tal y como se definen en 2.101 y denominados también en lo que sigue como equipo.” NTC-IEC 60601-2-30 Equipos Electromédicos. PARTE 2-30: REQUISITOS PARTICULARES PARA LA SEGURIDAD DE LOS EQUIPOS DE SUPERVISIÓN DE LA PRESIÓN SANGUÍNEA, DE FUNCIONAMIENTO AUTOMÁTICO, CÍCLICO E INDIRECTO: “El objeto de esta norma particular es especificar los requisitos particulares de seguridad de los equipos para la vigilancia de la presión sanguı́nea de funcionamiento automático, cı́clico e indirecto, prestando especial atención a la prevención de riesgos debidos al proceso de inflado.” 26 Capı́tulo 3 Sistema de Telemonitorización de Señales Biomédicas Este capı́tulo describe el diseño e implementación del sistema embebido para la adquisición y transmisión de señales biomédicas a través de redes inalámbricas, y su integración en el sistema de telemonitorización. En la Sección 3.1 se identifica el problema y el contexto en el cual se desarrolla la tesis, en la Sección 3.2 se presenta la solución a implementar en el sistema de telemonitorización propuesto, en la Sección 3.3 se presenta el dispositivo de adquisición de señales biomédicas, en el cual se integra el sistema TES ROv2.0 diseñado, en la Sección 3.4 se presenta en forma detalla el desarrollo e implementación del hardware y el software del Sistema Embebido TES ROv2.0, en la Sección 3.5 se presenta la descripción del diseño de los módulos de adquisición y comunicación, identificando las configuraciones necesarias para que el sistema TES ROv2.0 transmita por varios tipos de redes, en la Sección 3.6 se presenta el proceso realizado para integrar el dispositivo de adquisición de señales con el sistema de información SARURO, presentando las capturas realizadas, y en la Sección 3.7 se presenta la implementación final del Dispositivos de Telemonitorización de señales biomédicas, el cual funciona con el sistema TES ROv2.0. 27 3.1. Descripción Técnica del Problema La utilización de las Telecomunicaciones en la medicina ha permitido la implementación de nuevas estrategias para la prestación de los servicios de salud. En particular, la tesis se desarrolla en la estrategia correspondiente a la telemonitorización de señales biomédicas. El desarrollo de la tesis se apoya en la estructura del sistema de telemonitorización del Centro de Telemedicina, la cual se presenta en la Figura 3.1, y tiene como funciones capturar, procesar, adaptar y visualizar las señales. Figura 3.1: Esquema general del sistema de telemonitorización de señales biomédicas del Centro de Telemedicina, implementado con SARURO [104]. El funcionamiento del sistema inicia con la adquisición de las señales biomédicas utilizando un dispositivo electrónico y un Computador Personal, los cuales procesan y adecuan las señales para transmitirlas al sistema de información SARURO [104] (Ver Sección 2.1.4). El sistema de información esta instalado en el Computador, el cual posee la aplicación gráfica para visualizar la información localmente y permitir su envı́o al servidor de Telemedicina, desde el cual se transmite la información al centro de referencia o al lugar en donde se encuentre conectado el médico y/o especialista. En el dispositivo de adquisición de señales, se necesitaba diseñar e implementar una herramienta capaz de realizar la transmisión por redes inalámbricas al sistema SARURO [104], de la información proveniente de las tarjetas 28 de adquisición de señales biomédicas, aspecto puntual en el cual se trabajó la tesis. A continuación, se presentan los requerimientos a cumplir por la herramienta de comunicación a ser integrada en el dispositivo. 3.1.1. Análisis de Requerimientos Los requerimientos son: Ofrecer flexibilidad en el manejo de la información: el sistema debe tener la capacidad de almacenar, procesar y adaptar la información médica para realizar su transmisión por redes inalámbricas al sistema de información. Además, deber ser fácil de reprogramar, de tal forma que permita manejar diversos protocolos de transmisión y empaquetado de las señales biomédicas. Capturar la información proveniente de las tarjetas de adquisición de señales biomédicas seleccionadas. Permitir la integración de dispositivos de comunicación externos para transmitir la información por la red Celular, especialmente, en el manejo de un módem GSM con conexión por USB. El sistema debe ser fácil de adaptar al sistema de telemonitorización: el diseño debe permitir la interconexión en forma sencilla con el sistema de información clı́nico, adaptando las caracterı́sticas, especialmente del hardware, a las necesidades del sistema en la adquisición de la información de las señales. El sistema debe ser un diseño que integre los componentes necesarios para interconectarse con las tarjetas de adquisición de señales y los dispositivos externos de comunicación, de tal forma que no se requiera el uso de tarjetas o componentes electrónicos adicionales. Tener un tamaño limitado que permita su adaptación en el dispositivo: la solución a implementar debe tener un tamaño reducido que facilite su incorporación en el dispositivo, de tal forma que favorezca su transporte y su utilización en el campo de la Telemedicina. Ser una solución económica: la herramienta desarrollada debe ser una solución económica que reduzca los costos derivados por la utilización de componentes electrónicos comerciales1 . 1 Es importante destacar que implementar este tipo de soluciones con componentes 29 3.2. Sistema de Telemonitorización Propuesto La solución a implementar se basada en el diseño de un Sistema Embebido TES ROv2.02 , el cual funciona como una herramienta de comunicación entre la captura de las señales biomédicas3 , y la transmisión de la información por redes inalámbricas al sistema de información SARURO [104]. El sistema embebido (S.E.) TES ROv2.0 hace parte del dispositivo, como se presenta en la Figura 3.2, el cual es utilizado en el sistema de telemonitorización de señales biomédicas. En esta figura se especifica el esquema general de la solución a implementar, detallando los componentes, con los cuales se realiza la transmisión de la información en el dispositivo. Figura 3.2: Esquema general de la solución a implementar. El funcionamiento del sistema propuesto, consiste en capturar las señales biomédicas por medio de sensores, los cuales digitalizan la señales. Posterior comerciales, los cuales no son diseños a la medida, requieren la utilización adicional de más componentes y tarjetas, incrementando el costo de desarrollo. 2 La información sobre los sistemas embebidos esta disponible en la Sección 2.3. 3 La captura de las señales biomédicas se realizada con tres tarjetas comerciales, como se identifica en la Figura 3.2. 30 a esto, la información se envı́a al sistema TES ROv2.0, el cual se encarga de almacenar, adaptar y transmitir la información a SARURO [104]. En este sistema se visualiza la información y se tiene la opción de realizar una monitorización local o remota por medio de una aplicación Web. 3.3. Dispositivo de Adquisición de Señales En la tesis se implementó un dispositivo de telemonitorización de señales biomédicas4 , cuyo plano interno se presenta en la Figura 3.3, en la cual se identifican las ubicaciones del Sistema Embebido TES ROv2.0 y las tres tarjetas de adquisición de señales. Figura 3.3: Plano interno del dispositivo de adquisición de señales. 3.3.1. Adquisición de las Señales Biomédicas Las señales biomédicas seleccionadas para el desarrollo del proyectos corresponden al electrocardiograma (ECG) (Ver Sección 2.1.1), la frecuencia cardı́aca (FC) (Ver Sección 2.1.1), la saturación de oxı́geno en la sangre (SO2 ) (Ver Sección 2.1.2) y la presión arterial (PA) (Ver Sección 2.1.3)5 . Estas señales biomédicas suministran información relevante, con la cual se 4 Este dispositivo se ha utilizado en el Centro de Telemedicina, y fue desarrollado en la tesis dentro del grupo de investigación BioIngenium. 5 Este grupo de señales biomédicas son usadas en el Centro de Telemedicina para monitorizar el estado de los pacientes en las Unidades de Cuidados Intermedios (UCIs), las cuales se implementaron y se utilizan en el servicio de Telemedicina prestado a CAPRECOM. Las UCIs han sido desarrolladas en las actividades de investigación del grupo BioIngenium. 31 puede monitorizar el estado de un paciente, ya sea en el diagnostico, seguimiento y/o control de una patologı́a. Para la adquisición de las señales biomédicas se utiliza un conjunto de componentes electrónicos OEM6 (Ver Figura 3.4), adquiridos por el Centro de Telemedicina7 . Estas tarjetas son fabricadas por la compañı́a alemana MEDLAB8 , los cuales cumplen con las disposiciones de la norma técnica EN 60601-1, en la cual se especifican los requerimientos generales de seguridad que deben cumplir los equipos médicos. Figura 3.4: Adquisición de las señales biomédicas. A continuación se presentan las tarjetas implementadas en el sistema de telemonitorización propuesto, con sus principales caracterı́sticas técnicas9 . Adquisición de la Señal del ECG Para la adquisición de esta señal se utiliza una tarjeta de referencia comercial EG01010 (ECG OEM Module - Medlab GmbH) 10 , presentada en la Figura 3.5, la cual está fabricada según la norma IEC 60601-1 y puede ser utilizada en el desarrollo de equipos para la monitorización de señales 6 OEM corresponde a las siglas de Original Equipment Manufacturer. La selección de estos componentes fue realizada en el grupo de investigación BioIngenium para el desarrollo de los proyectos implementados en el Centro de Telemedicina. 8 Medlab es una empresa reconocida en la fabricación de dispositivos médicos, especialmente en Europa, fundada en 1993, la cual ofrece un gran número de equipos incluyendo componentes electrónicos OEM, cumpliendo con estándares internacionales en los procesos de fabricación, entre los que se encuentra la ISO 9001:2000. [65] 9 Esta información ha sido extraı́da de los manuales y las hojas de datos, los cuales se encuentran en el CD. 10 La información de la tarjeta EG01010 puede ser consultada en la página Web http: //www.medlab.eu/english/modules/ekgmodules/eg01010/index.html 7 32 biomédicas. Figura 3.5: Componentes electrónicos para la captura del ECG. [65] Las señales son capturadas con electrodos superficiales de baja impedancia y permite la detección de las tres derivaciones bipolares de los miembros: I, II y III (Ver Sección 2.1.1). El protocolo de comunicación que establece esta tarjeta, usa el estándar RS232 ası́ncrono con la siguiente configuración: Velocidad de comunicación Número de bits de datos Modo ası́ncrono Bit de parada Paridad 9600 baudios. 8. bidireccional. 1. ninguna. Las caracterı́sticas técnicas de la tarjeta se presentan en la Tabla 3.1. CARACTERÍSTICA Tamaño: 77mm x 52.5mm, altura máxima de 10mm. Peso: 28g. Alimentación: 5V ± 10 %. Consumo de potencia: aproximadamente 150 mW. Consumo de corriente: 26 a 30 mA. Aislamiento galvánico de la tarjeta. Rango de detección de la frecuencia cardiaca: 30 - 250 lpm. Precisión frecuencia cardiaca: ± 1 %, ± 1 dı́gito. Filtro notch de 60 Hz. Cables conductores aislados galvánicamente para protección contra ruido externo y diseñados para soportar voltajes de desfibrilación. Tabla 3.1: Caracterı́sticas técnicas principales de la Tarjeta de Adquisición de ECG. 33 Medición de la Saturación de Oxı́geno en la Sangre Para la adquisición de esta señal se utiliza el sensor de Oximetrı́a y la tarjeta de referencia comercial PEARL 100 (SpO2 OEM Module - Medlab GmbH) 11 , presentada en la Figura 3.6. El módulo cumple con los siguientes estándares: IEC 60601-1:1996, IEC 60601-1-4:2001 y EN ISO9919:2005. Figura 3.6: Componentes electrónicos para la medición de SpO2 . [65] La tarjeta permite capturar y medir el nivel de SO2 , la componente AC de la luz absorbida en la región infrarroja y la frecuencia cardiaca (Ver Secciones 2.1.2 y 2.1.1). El protocolo de comunicación que establece esta tarjeta, usa el estándar RS232 ası́ncrono con la siguiente configuración: Velocidad de comunicación Número de bits de datos Modo ası́ncrono Bit de parada Paridad 9600 baudios. 8. unidireccional. 1. ninguna. Las caracterı́sticas técnicas de la tarjeta se presentan en la Tabla 3.2. 11 La información de la tarjeta PEARL 100 puede ser consultada en la página Web http://www.medlab-gmbh.de/english/modules/pulseoximetry/pearl/index.html 34 CARACTERÍSTICA Tamaño de 77mm x 53mm, altura máxima de 6mm. Peso: 23g. Alimentación: 2.5 - 5.5 V. Consumo de corriente: 33 a 60 mA. Consumo de potencia: 100 - 150 mW, dependiendo del voltaje de alimentación. Rango para la medición de la frecuencia cardiaca: 30 - 250 lpm. Precisión de la frecuencia cardiaca: ± 1 %, ± 1 dı́gito. Rango de medida del nivel de SO2 : 0 % a 100 %. Tabla 3.2: Caracterı́sticas técnicas principales de la Tarjeta de Adquisición de SpO2 . Medición de la Presión Arterial Para la adquisición de esta señal se utiliza el brazalete y la tarjeta de referencia comercial NIBP 2000 (OEM Module - Medlab GmbH) 12 , presentados en la Figura 3.7. El módulo se fabrica cumpliendo los estándares: EN IEC 60601-1, EN IEC 60601-2-30:2000, EN ISO 1060-1:1995, EN ISO 10603:1997 y EN ISO 1060-4:2004. Figura 3.7: Componentes electrónicos para la medición de PA. [65] El dispositivo permite la medición de: presión arterial media (PAM)13 , PA diastólica (DBP), PA sistólica (SBP) y frecuencia cardı́aca (Ver Sección 12 La información de la tarjeta NIBP 2000 puede ser consultada en la página Web http: //www.medlab.eu/english/modules/nibpmodules/nibp2000/index.html 13 Presión Arterial Media(PAM): corresponde a la presión promedio medida en un ciclo cardı́aco completo [42]. Se calcula con la ecuación 3.1: P AM = Pdiastólica + Psistólica − Pdiastólica 3 35 (3.1) 2.1.3). El módulo se puede configurar para realizar mediciones cı́clicas con intervalos de 1 a 90 minutos. El protocolo de comunicación que establece esta tarjeta, usa el estándar RS232 ası́ncrono con la siguiente configuración: Velocidad de comunicación Número de bits de datos Modo ası́ncrono Bit de parada Paridad 4800 baudios. 8. bidireccional. 1. ninguna. Las caracterı́sticas técnicas de la tarjeta se presentan en la Tabla 3.3. CARACTERÍSTICA Tamaño: 128mm x 68mm, altura máxima de 34mm. Peso: 170g. Alimentación: 7V ± 15 % ó 12V ± 15 %. Consumo de corriente: 50 a 750mA. Consumo de potencia: durante la medición: máximo 3.5W y en reposo: máximo 0.35W. Rango para la medición de la frecuencia cardiaca: 30 - 250 lpm. Tabla 3.3: Caracterı́sticas técnicas principales de la Tarjeta de Adquisición de PA. 3.4. Sistema Embebido TES ROv2.0 La herramienta de comunicación TES ROv2.0 creada en la tesis es un sistema embebido diseñado a la medida, el cual integrar los componentes necesarios para conectar e interactuar con los dispositivos de comunicación y las tarjetas de adquisición de señales, sin la necesidad de utilizar componentes electrónicos complementarios en el dispositivo de Telemonitorización. 3.4.1. Selección del Sistema Embebido Inicialmente, la telemonitorización de las señales biomédicas en el Centro de Telemedicina se realizaba utilizando un Computador Personal, solución que limitaba la portabilidad del sistema, al tener un tamaño considerable, e incrementaba los costos. Esta opción era un desarrollo sobredimensionado 36 para la función a implementar, la cual consiste en la captura y transmisión de las señales biomédicas por redes inalámbricas. Una de las más importantes restricciones que se tenı́an al utilizar un computador en el sistema consistı́a en la carencia de los periféricos especı́ficos para realizar la telemonitorización, siendo necesario utilizar dispositivos externos tanto para la captura como para la transmisión de la información de las señales biomédicas. A partir de estos aspectos, se planteo el desarrollo de la tesis que tenia como motivación principal generar una solución integrada, diseñando e implementando un S.E. como una herramienta de comunicación en el sistema de telemonitorización. Se escogió los S.E. para implementar el dispositivo de telemonitorización porque ofrecen gran versatilidad en el manejo de la información, permiten diseñar sistemas independientes de computadores, se pueden realizar aplicaciones especificas y gestionar en forma eficaz los recursos, tanto de software como de hardware, para realizar los procesos de captura, almacenamiento y transmisión de la información de las señales biomédicas. En este punto se tenı́an dos opciones las cuales correspondı́an a utilizar un sistema embebido comercial como: la BeagleBoard14 , DevKit325015 , o ATMEL ATEVK110016 o diseñar un sistema embebido propio. Para tomar la decisión de construir un S.E. propio se tuvieron en cuenta los criterios que se presentan en la Tabla 3.4 y se analizan a continuación, con los cuales se puedo establecer que diseñar e implementar el S.E. TES ROv2.0 era una de las mejores opciones en ese momento. a. Conocimiento de la Arquitectura del sistema: en los sistemas comerciales no se revela la arquitectura de hardware que lo compone por ser parte del negocio. Por otro lado, al diseñar una arquitectura propia 14 La página web del S.E. es: http://beagleboard.org/. Su costo es de $149, Trabaja con Linux Embebido y tiene un procesador OMAP3530. 15 La página web del S.E. DevKit3250 es: http://www.armkits.com/product/ devkit3250.asp. Tiene un costo de $199, funciona con Linux Embebido, tiene un procesador de 266MHz, ARM926EJ S core. 16 La página web del S.E. ATMEL ATEVK1100 es: http://www.newark.com/. Tiene un costo de $171, funciona con una arquitectura de procesador AVR32 y se trabaja con Linux Embebido. 37