Carlos Armando Bravo Corona
Anuncio

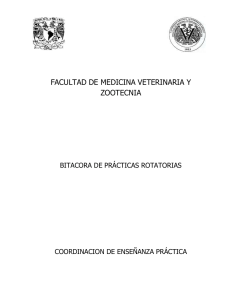
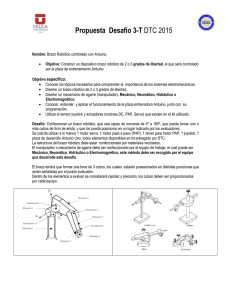
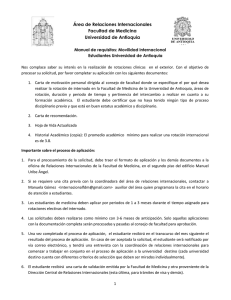
SISTEMA ROBÓTICO PARA CELULAS DE MANUFACTURA FLEXIBLE Bravo Corona, Carlos Armando CECYTEG, Avilés Ferrera, José Josías Universidad Tecnológica del Suroeste de Guanajuato, UTSOE RESUMEN Este artículo presenta el desarrollo del modelo de cinemática directa de un robot LEGO para la simulación de un sistema de manufactura flexible. La cinemática se clasifica como cinemática directa e inversa; la primera permite conocer las coordenadas de cualquier punto en función de los grados generados por las articulaciones mediante matrices que representan un sistema de coordenadas ubicadas a lo largo del manipulador. La cinemática inversa busca obtener los movimientos de cada grado de libertad partiendo de la posición final de robot [1]. El algoritmo para desarrollar el movimiento del brazo robótico se diseñó en el software LEGO Mindstorm EV3 Home Edition. INTRODUCCIÓN Un sistema de manufactura flexible (SMF) son un conjunto de máquinas automáticas, que se unen para crear un producto; con el fin de automatizar el funcionamiento de estos sistemas, las máquinas deben estar en constante comunicación y trabajar en conjunto en la fabricación de piezas [2]. Una de las ventajas trabajar con los SMF es que se puede optimizar la fabricación por lotes, se optimiza el empleo de sistemas de amarre de piezas, herramientas, tiempos y mejora la gestión de la producción [3]. La cinemática es la parte de la física que estudia el movimiento de sistemas mecánicos y puede aplicarse para determinar los movimientos de un robot. La cinemática directa, es el estudio analítico del movimiento de un robot de acuerdo a un sistema cartesiano de referencias fijo [4]; por otra parte en la cinemática inversa, se trata de resolver la configuración que debe adoptar el robot para una posición y orientación del extremo conocidas [5]. Figura 1. Diagrama de relación entre la cinemática directa e inversa. Los movimientos que puede realizar un robot en cada articulación con respecto a un punto anterior se denominan grados de libertad (GDL), el número de grados de libertad de una cadena cinemática se obtiene mediante la fórmula de Grübler [6] e indica lo siguiente: Dónde: λ: GDL del espacio de trabajo n: Número de eslabones j: Número de articulaciones fj: GDL permitidos de la articulación j OBJETIVO El objetivo de este trabajo es diseñar un brazo robótico como parte de una célula de manufactura flexible para que permita identificar tres colores y a partir de este reconocimiento el brazo efectúe movimientos específicos. Construir un brazo con tres grados de libertad adaptando bloques LEGO Mindstorm EV3. Diseñar el modelo de cinemática directa del brazo de un robot para identificar bloques de tres colores utilizando el programa LEGO Mindstorm EV3 Home Edition. MATERIALES Y MÉTODOS El material utilizado en este experimento es el sensor de color [7], dos motores grandes y un motor mediano [8], ladrillos y piezas de ensable variados del set LEGO Home edition. También se requiere del software del mismo nombre. 8vo. Verano Estatal de Investigación CONSEJO DE CIENCIA Y TECNOLOGÍA DEL ESTADO DE GUANAJUATO SISTEMA ROBÓTICO PARA CELULAS DE MANUFACTURA FLEXIBLE Bravo Corona, Carlos Armando CECYTEG, Avilés Ferrera, José Josías Universidad Tecnológica del Suroeste de Guanajuato, UTSOE Armado del brazo robótico. Ya que el kit LEGO Home Edition no contempla el armado de un brazo robótico, se retomaron varios pasos para su diseño del set principal designado como robot arm 45544 del kit Mindstorm de la serie Education. Se adaptaron algunos engranes con piezas del mismo kit Home Edition para completar su diseño. De igual forma se tuvo que programar completamente el algoritmo en el programa para indicar los movimientos de brazo robótico. Movimiento de los servomotores. Hay dos tipos de motores: el motor mediano y el motor grande como se muestra en la Figura 2, la diferencia entre ambos es la forma y el tipo de movimiento que podría lograrse de con ellos. Motor Mediano Motor Grande Sensor de color Figura 2. Características del motor mediano, el motor grande el sensor de color. Para este experimento se programaron los motores en la función de encendido por rotaciones, en esta elección el sensor de rotación interna del motor grande mide los grados de rotación. La siguiente Tabla 1 muestra los grados de rotación que pueden indicarse en los motores. Rotaciones 1 2 0.5 1.25 7.2 Grados 360 720 180 450 2592 Diagrama de flujo. El algoritmo utilizado en experimento es el siguiente: este Figura 3. Diagrama de flujo para identificar colores con el brazo robótico. A continuación se describe la dinámica directa que se programó con el brazo robótico señalando el centro como punto de inicio de las acciones. Utilizando los bloques de flujo bucle e interruptor (Figura 4) del programa activamos el sensor de color para identificar tres colores el rojo, verde y el azul, cuando identifica algún color el brazo actúa de manera distinta, con el color rojo, se levanta de la posición inicial cerrando las pinzas, gira a la derecha desciende, abre las pinzas, se levanta y gira a su posición de inicio; cuando identifica el color verde, cierra las pinzas, se levanta, gira a la izquierda, desciende abre las pinzas, se levanta y llega a su posición de inicio; con el color azul, se levanta y abre y cierra las pinzas tres veces y regresa a su posición original. El bucle hace que pueda repetirse la acción indefinidamente. Figura 4. Sensor de color inserto dentro del bucle. Tabla 2. Formas de obtener la rotación. 8vo. Verano Estatal de Investigación CONSEJO DE CIENCIA Y TECNOLOGÍA DEL ESTADO DE GUANAJUATO SISTEMA ROBÓTICO PARA CELULAS DE MANUFACTURA FLEXIBLE Bravo Corona, Carlos Armando CECYTEG, Avilés Ferrera, José Josías Universidad Tecnológica del Suroeste de Guanajuato, UTSOE Figura 5. Tres grados de libertad para el brazo robotico. Cinemática Directa. La secuencia de actividades que se diseñaron en el brazo robótico (Figura 5) fueron las siguientes: 1. Encendido del sensor de identificación de color. 2. Identificación del color rojo, y la promoción del trayecto del brazo robótico hacia la derecha. 3. Identificación del color verde, y la promoción del trayecto del brazo robótico hacia la izquierda. 4. Identificación del color azul, y la promoción del trayecto del brazo robótico hacia la arriba. RESULTADOS Para realizar la dinámica directa se diseñaron tres movimientos que se inician cuando el sensor de colores detecta el color rojo, verde o azul, la Tabla 2 muestra el tipo de encendido, la velocidad y la dirección que hacen los servomotores, se diseñaron los movimientos similares a imágenes de espejo, en donde se parte de un punto, luego se realiza el movimiento y al terminar vuelve el brazo a su posición original. C B A B C A B Rotaciones Rotaciones Rotaciones Rotaciones Rotaciones Rotaciones Rotaciones 15 15 20 15 15 25 10 -270 60 -75 -75 270 75 75 Color Azul B Bucle A A B Encendido Rotaciones Conteo Rotaciones Rotaciones Rotaciones Velocidad 5 Dirección -80 20 25 5 -75 75 80 Tabla 2. Movimiento de los servomotores. CONCLUSIONES Y DISCUSIÓN Se adecuo la tecnología LEGO para producir un brazo robótico e implementar una célula de manufactura flexible. El brazo robótico se programó para identificar tres colores específicos, y en cuyo caso la identificación de cada color produce una cinemática directa por cada color. La cinemática inversa, es un proceso que requiere mayor tiempo para su programación y no se logró finalizar para efectos de este brazo robótico. REFERENCIAS BIBLIOGRÁFICAS [1] M. S. D. John Faber Archila Diaz, «Estudio y modelamiento del robot KUKA KR 6 Rev. Fac. Ing. Univ. Antioquia, vol. 46, nº 46, pp. 132-144, 2008. [2] A. F. F. &. Cols, «Integración de una célula flexible de mecanizado de tipo docente, Ingeniare. Revista chilena de ingenier, vol. 15, nº 1, pp. 27-34, 29 Junio 2007. [3] E. T. S. d. Ingenieria, «Universidad del País Vasco,» 21 Marzo 2012. [En línea]. Available: http://www.ehu.eus/manufacturing/docencia/66_ca.pdf. [Último acceso: 15 Julio 2015]. [4] R. C. Fernando, MATLAB Aplicado a robótica y mecatrónica, México. D.F.: Alfaomega, 2012. [5] B. A. &. cols., Fundamentos de robótica, España: Mc Graw Hill, 2007. [6] J. J. Craig, Robótica, México: Pearson Prentice Hall, 2006. Movimientos de los servomotores. Color Rojo A A B C B A B C A B Color Verde A A B Encendido Rotaciones Rotaciones Rotaciones Rotaciones Rotaciones Rotaciones Rotaciones Rotaciones Rotaciones Rotaciones Encendido Rotaciones Rotaciones Rotaciones Velocidad 20 25 15 15 15 20 15 15 25 10 Dirección -75 75 -80 270 60 -75 -80 -270 75 75 Velocidad 100 20 15 Dirección 0 -75 -75 [7] Lego Mindstorm EV3, «Mindstorm EV3,» LEGO, n.d. n.d. 2014. [En línea]. Available: http://localhost:58401/localizedMapping_B90BDB05-F70E-4B0B-8CEA 031DCF197215/es/editor/page.html?Path=blocks%2FLEGO%2FMediumMotor.htm [Último acceso: 13 Julio 2015]. [8] LEGO, Mindstorm EV3, «Mindstorm EV3,» LEGO, n.d. n.d. 2014. [En línea]. Available: http://localhost:58401/localizedMapping_B90BDB05-F70E-4B0B-8CEA 031DCF197215/es/editor/index.html. [Último acceso: 13 Julio 2015]. 8vo. Verano Estatal de Investigación CONSEJO DE CIENCIA Y TECNOLOGÍA DEL ESTADO DE GUANAJUATO