caracerísticas y funcionamiento de la tarjeta Enconor
Anuncio

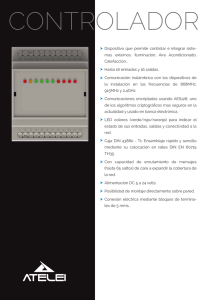
CONTROLADORA EDUCATIVA ENCONOR PLUS. (CONTROL POR ORDENADOR) CONTROLADORA ENCONOR PLUS. Índice 1. Introducción. 2. Definición de controladora, tipología. 3. Características y zonas de la controladora Enconor Plus. 4. Programas a utilizar. 5. Conexión de la placa al ordenador. 6. Salidas: digitales y analógicas. 7. Entradas: digitales y analógicas. 8. Consejos de mantenimiento. 9. Documentación. 1. Introducción. En este tema vamos a conocer una controladora educativa. Estudiaremos sus diferentes partes, entradas, salidas y la conexión de elementos eléctricos-electrónicos. Estos conocimientos junto con los que ya tenemos sobre Logo y sus principales primitivas nos permitirán el control de maquetas. 2. Definición de controladora, tipología. Una controladora es un dispositivo que se conecta al PC haciendo de intermediario entre el mundo físico, sensores, motores... y un programa. Si cambiamos el programa las acciones realizadas cambian. Si recordamos las diferencias entre automatización y robótica llegaremos a la conclusión de que la controladora, por ser programable, nos permite la entrada al mundo de los robótica. Las controladoras educativas no son fáciles de encontrar, por lo menos a día de hoy, seis son los modelos más usuales, a saber: * Controladora educativa de investrónica (Albertina). * Controladora educativa de BSP (Binary Systems Precision, S.A.). * Controladora del Pntic o Cnice. * Controladoras Enconor (Enconor, Enconor 2 y Enconor Plus). 3. Características y zonas de las Controladoras Enconor. La controladoras de la empresa Enconor presentan las características siguientes: CONTROLADORA ENCONOR: * 8 Entradas digitales, activas al unir sus dos terminales. * 4 Salidas de tipo interruptor activadas mediante relé. Carga nominal de 10 Amperios a 250 Voltios en c. a. * 4 Salidas de tipo conmutador de cruce activadas mediante relé. Carga nominal de 5 Amperios a 250 Voltios en c. a. * Comunicación con el ordenador a través del puerto serie RS232 (COM1 o COM2). * Velocidad de comunicación con el ordenador 9600 baudios. * La unión al ordenador se hace mediante un cable de 3 hilos. * Alimentación de 9 Voltios mediante alimentador de 9 voltios 1 Amperio incluido (fuera de la placa controladora). * Todo el circuito está montado en una única placa de circuito impreso de doble cara y serigrafiada para facilitar la colocación de los componentes. * Control mediante lenguaje WINLOGO y MSWLOGO. Concretamente tenemos procedimientos de control en WinLogo para MS-DOS y WinLogo para Windows, además de para MSWLOGO. CONTROLADORA ENCONOR 2: * Para quienes, además de control digital, deseen medir parámetros de tipo analógico y actuar en consecuencia. * Programable en WinLogo de MS-DOS, WinLogo de Windows y MSWLOGO. * Esta controladora es de idénticas características que la ENCONOR, a la que se ha añadido 5 entradas analógicas con tensión comprendida entre 0 y 5 voltios y 8 bits de resolución. * Todo el software escrito en LOGO para la ENCONOR funciona igualmente en la ENCONOR 2. * Además de las instrucciones de control de la ENCONOR, se ha añadido una nueva que permite leer el valor de las entradas analógicas. * La presentación es de similares características a la ENCONOR (montaje totalmente transparente). CONTROLADORA ENCONOR PLUS * Diseñada para los que necesiten las mayores prestaciones en control por ordenador: control digital, lectura de magnitudes analógicas y control analógico de elementos o actuadores eléctricos. * Programable en WinLogo de MS-DOS, WinLogo de Windows y MSWLOGO. * Esta controladora es de idénticas características que la ENCONOR 2, a la que se ha añadido 4 salidas analógicas, con un margen de tensión entre 1,6 y 10,7 voltios y 700 mA por salida. Todas ellas están protegidas contra sobrecarga y cortocircuito. La tensión de alimentación de dichas salidas es externa a la placa y de un valor de 15 voltios. * Todo el software escrito en LOGO para la ENCONOR y ENCONOR 2 CARACTERÍSTICAS ENCONOR ENCONOR2 ENCONOR PLUS Salidas digitales tipo interruptor 4 4 4 Salidas digitales tipo conmutador de cruce 4 4 4 entradas digitales 8 8 8 entradas analógicas -- 5 5 Salidas analógicas (tensión programable) -- -- 4 funciona igualmente en la ENCONOR PLUS. * Además de las instrucciones de control de la ENCONOR 2, se han añadido dos nuevas que permite escribir el valor de las salidas analógicas. * La presentación es similar a la ENCONOR y ENCONOR PLUS, aunque de mayores dimensiones. A modo de resumen y conclusión podemos decir que las controladoras Enconor son muy similares entre si, con la única salvedad que en los modelos superiores se le van añadiendo características adicionales. Por tanto nos bastará estudiar el modelo ENCONOR PLUS para conocer el funcionamiento de todas las controladoras Enconor. La controladora Enconor Plus presenta el siguiente esquema con la indicación de sus partes: 1. Entradas digitales. 2. Salidas digitales por relé. 3. Diodos Led indicadores de activación o desactivación de salidas digitales. 4. Entradas analógicas. 5. Alimentación a 9V y masa. 4. Programas a utilizar. Para su control debemos de utilizar un lenguaje de programación, son varias las alternativas con las que contamos. * C: Se trata de un lenguaje muy rápido, pero difícil de aprender. * Basic. Se trata de un lenguaje en el que podemos probar las ordenes de forma directa, aunque es sencillo no nos parece adecuado para aprenderlo en muy poco tiempo. * Logo. Al igual que Basic es un lenguaje interpretado, es decir podemos probar las órdenes, pero además sus instrucciones están es español y son muy intuitivas, nos permite crear nuestras propias órdenes. Tiene como inconveniente el ser lento. Por su simplicidad, difusión, y posibilidad de crear procedimientos que se llaman unos a otros será el lenguaje que utilicemos. Dentro de las múltiples versiones de Logo hemos elegido: - Winlogo -Mswinlogo. Las principales razones que nos llevan a esta elección son: · Las primitivas están en español. · WINLOGO Tiene una versión para MS-DOS que nos permitirá utilizarla tanto en ordenadores antiguos (PC 286 y 386) como en ordenadores mas modernos que puedan ejecutar un programa de MS-DOS. Esta versión tiene un entorno de ventanas parecido a los de Windows y por tanto mas amigable para trabajar. · WINLOGO Tiene otra versión para Windows, que podemos utilizar en caso de disponer de equipos mas modernos y potentes. · MSWLOGO Es un lenguaje de libre distribución y, por tanto, gratuito. Además al estar basado en Windows nos permite hacer programas con ventanas, botones, etc. Aspecto del software de control con MSWlogo Si queremos utilizar nuestra controladora con Mswinlogo tenemos que cargar en memoria un programa para que la controladora se pueda comunicar con el PC y para que se carguen las primitivas de uso de la controladora. 5.- Conexión de la Placa al ordenador. Antes de cargar en memoria el programa que nos permitirá el control de nuestra placa es necesario asegurarse del buen funcionamiento de esta y conectarla al ordenador. La primera prueba de buen funcionamiento se obtiene al conectar la fuente de alimentación a la placa controladora y a la red 220 V, sin ninguna otra conexión (la conexión al ordenador). Si no hay problemas el diodo amarillo D 17 comenzará a parpadear. Puede ocurrir que en el momento de la conexión todos los diodos de color rojo se encienda un instante y se vuelva a apagar, esto es normal, aunque no tiene por que ocurrir. Si el diodo led amarillo no parpadea accionar y soltar el pulsador reset situado sobre la placa. Si con esto sigue sin parpadear es que hay algún error. El resto de pruebas de funcionamiento las podemos realizar activando los botones gráficos que aparecen en el programa Mswinlogo con el ratón. Si utilizamos Winlogo debemos en primer lugar realizar la instalación de programas y archivos, así como de la conexión de la placa al ordenador. Instalación de Programas y archivos de comunicación con la controladora. Para instalar WINLOGO o MSWINLOGO en el ordenador, seguiremos las instrucciones del programa. Instalado el programa debemos de copiar los correspondientes controladores o procedimientos de comunicación de la placa controladora, en el mismo directorio donde se ha instalado Winlogo o Mswlogo. Los controladores cambiaran atendiendo a la versión de Winlogo o Mswlogo que estemos utilizando y de la placa Enconor que tengamos. Conexión de la placa al ordenador. Realizaremos las siguientes conexiones. 1.- Conectaremos un extremo del cable serie al conector tipo D de 9 patillas de la placa controladora, y el otro extremo de este cable al puerto serie del ordenador, será un conector D macho de 9 o 25 patillas según el modelo del ordenador. 2.- Conectaremos la clavija del alimentador a la placa controladora y por el otro extremo a la red a 220 V. 3.- Encendemos el ordenador, ejecutamos el programa Winlogo o Mswlogo y escribimos en la ventana de trabajo «carga encoplus», si utilizamos Winlgo o «carga encoplus.log», si utilizamos Mswlogo y pulsamos intro. (Los símbolos «» no se escriben) 4.- Cuando realicemos todo este proceso la pantalla se dividirá en dos ventanas, la superior será la pantalla de mensajes y la inferior la de trabajo, o sea donde escribiremos las ordenes. Nos aparecerá un menú de opciones para determinar el canal de comunicación serie que se empleará para el control de la tarjeta. Las opciones son: *Detección automática del canal de comunicación. Esta opción es la que debemos de elegir. Si aparece alguna anomalía, como que el ratón deje de funcionar o se bloque el programa... hay que salir de programa y volver a entra y elegir una de las siguientes opciones. *Canal de comunicación COM 1. El programa intenta ponerse en comunicación con la tarjeta controladora a través del puerto COM 1. Si lo consigue mostrará un mensaje de aviso «Comunicación establecida por el canal 1». Este será el canal que utilizaremos en el futuro. Si no se consigue la comunicación, aparecerá el correspondiente aviso. Se saldrá del programa y entraremos de nuevo probando la siguiente opción. *Canal de comunicación COM2. El sistema de proceder es idéntico al caso anterior. Puede ocurrir que en un primer momento nos aparezca un mensaje de error en la comunicación, con frecuencia este error se subsana desconectando la fuente de alimentación y volviéndola a conectar, si después de esto sigue sin funcionara ninguno de las tres opciones puede que haya algún problema en la tarjeta controladora, en el cable de conexión o el los dos. 5.- Cargamos en memoria los procedimientos de control y prueba. Los procedimientos de control los estudiaremos más adelante. Los procedimientos de prueba nos permitirán comprobar a fondo el buen funcionamiento de nuestra placa si utilizando Winlogo. Estos procedimientos se encuentran en el archivo «Pruebas.log», archivo que copiaremos en el mismo directorio en el que hayamos instalado Winlgo. 6. Salidas. Las salidas se encargan de recoger los datos suministrados por el microcontrolador de la placa y conectar o desconectar los relés en función de los datos. Cuando activamos alguna de las ocho salidas de estas tarjetas (Serie de Tarjetas Enconor), lo que hacemos realmente es mover los contacto de uno de los relés internos que lleva. Las salidas las utilizaremos con los «actuadores» bombillas, motores, pues con ellas podremos controlar su funcionamiento. Las controladoras Enconor disponen, en general, de dos tipos de salidas, las digitales y las analógica. Salidas Digitales. Las salidas digitales sólo pueden tomar dos estados, activadas («uno») y desactivada («cero») En esta salidas nos encontramos además de los relés unos diodos led indicadores. Cuando reciben un «uno» se conecta el relé correspondiente y se enciende el diodo led que nos indica que la salida se encuentra conectada. Si se recibe un «cero» el relé se desconecta y el diodo led se apaga. Las salidas digitales que estas tarjetas presentan son las siguientes: * Cuatro salidas de tipo interruptor activadas mediante relé. Carga nominal de 10 Amperios a 250 Voltios c.a. Se trata de las salidas 1 a 4, estas tienen dos terminales cada una. Cuando activamos una de ellas, lo que hacemos realmente es unir estos dos terminales, es decir, actúan como un interruptor. Salida 1 1 1 2 2 * Cuatro salidas de tipo conmutador de cruce activadas mediante relé. Carga nominal de 5 Amperios a 250 Voltios c.a. Se trata de las salidas 5 a 8, estas tienen cuatro terminales cada una, y se corresponden con las patillas de una llave de cruce (interruptor DPDD). Salida 5A 3 5B 1 5A 4 2 Salida 5B Estas salidas se pueden utilizar como elementos de control en los circuitos de los siguientes tipos: 1.- Interruptores del tipo UPUD, entradas 1 a 4. 2.- Interruptores del tipo UPUD, entradas 5 a 8, para esto utilizaremos las dos clemas exteriores o las dos interiores de las cuatro disponibles en una salida. 3.- Conmutadores DPDD, entradas 5 a 8, lo que nos permitirá controlar el sentido de giro de un motor. 4.- Conmutadores de cruce, entradas 5 a 8, se utilizarán como entradas al conmutados las dos etiquetadas como A, y como salidas del conmutador de cruce las dos etiquetada como B. ORDENES DE CONTROL. Las órdenes o procedimientos adecuados para el control de las salidas serían: <Conecta «n> o <conecta n> (siendo n un número comprendido entre el 1 y el 8). Esta orden conecta la salida indicada en el número n y deja las demás como estaban. Por ejemplo «conecta 3» activa la salida número 3 y deja el resto como estaban. <Apaga «n> o <apaga n> (siendo n un número comprendido entre el 1 y el 8). Apaga la salida indicada en el número n y deja las demás como estaban. Por ejemplo, «apaga 3» desactiva la salida 3 y deja el resto como estaban. <EnviaOcteto n> . Con esta orden podemos actuar sobre varios motores, tanto para conexión como para desconexión. Para comprender la orden te remitimos al manual de mswinlogo. Conexión de receptores a las salidas digitales. Estas salidas no están alimentadas eléctricamente, por lo tanto necesitaremos una fuente de alimentación externa para alimentar cualquier receptor, pues en estas controladoras las salidas no serían más que elementos de control en un circuito. Debemos de recordar que la carga nominal no debe de superar los 10 A a 250V en c.a. en las salidas tipo interruptor, ni los 5 A a 250V en c.a. en las de tipo conmutador de cruce. Conexión de un motor. Si lo que pretendemos es una simple conexión, basta con utilizar una de las salidas tipo interruptor (salidas 1 a 4) como el elemento de control del circuito en el que se encuentra el motor. Si lo que se pretende es conectar un motor y controlar su sentido de giro utilizaremos las salidas 5 a 8 y se procederá como el siguiente esquema. Salida 5A Salida 5B M En esta situación el motor se encontraría girando en una dirección y cuando se active la salida 5, los contactos de la llave de cruce bajarán, cambiando el sentido de giro del motor. Para actuar sobre la puesta en marcha o el paro de este motor deberíamos de usar una salida como interruptor general, tal y como explicamos al principio de este apartado. Considerando el número de salidas tipos conmutador queda claro que la placa permitirá controlar con este sistema cuatro motores. Conexión de una Bombilla. Para conectar una bombilla se utilizarán las salidas 1 a 4, si bien conociendo las conexiones de las otras salidas, también se podrían montar en las otras salidas. Salidas Analógicas. Son cuatro salidas analógicas, cada una de ellas puede dar una tensión de salida de 1.6 a 10.5 V con una corriente máxima de 0.65 A (lo que nos permite el control de pequeños motores y dispositivos de pequeña potencia). Esta salidas están protegidas contra cortocircuito, cuando esto ocurre un led se ilumina intensamente. Para conseguir las tensiones señaladas la placa se deberá de alimentar con una tensión externa de 12 a 15 V. Se utilizarán estas salidas para controlar, por ejemplo la velocidad de giro de un motor o el diferente grado de iluminación de una bombilla. ORDENES DE CONTROL. Las órdenes o procedimientos adecuados para el control: <SalidaAnalogica n x> ó <salidaanalogica n x> (siendo n un número entre el 1 y el 4 y x un número entre el 0 y el 255): Fija en la salida analógica especificada en <n> el valor de tensión proporcional al valor de x. Para conocer el valor de tensión en la salida se calcula: x/23,8. Cada incremento de x provoca un incremento de tensión en la salida de 0,04 V. En cualquier momento podemos saber el valor de x en cualquier salida analógica y por tanto, de su tensión. Para ello existen unas variables <salanalogica1> <salanalogica2> <salanalogica3> y <salanalogica4> que guardan este valor para cada una de las salidas. Hay que tener cuidado de no modificar estas variables, ya que dejaría de corresponder su valor con la realidad de las salidas. Ejemplos: <salidaanalogica 1 120> Fija una tensión en la salida analógica 1 de 120/23,8= 5,04 Voltios. <salidaanalogica 3 255> Fija la máxima tensión en la salida analógica 3, que es 255/23,8= 10,7 Voltios. <voltaje n x> ó <Voltaje n x> (siendo n un número entre el 1 y el 4 y x un número entre el 0 y el 10.7): Fija en la salida analógica especificada en <n> el valor de tensión especificado en x. La precisión de la tensión en la salida estará dentro del margen de un 5% de la dada. El mínimo incremento de tensión en la salida será de 0,04 V. Ejemplos: <voltaje 1 5.2> Fija una tensión en la salida analógica 1 de 5,2 Voltios. <salidaanalogica 3 10> Fija una tensión en la salida analógica 3 de 10 Voltios. Si se especifica en x un valor menor de 1,6 Voltios, la salida quedará con 1,6 V. por ser éste el valor mínimo que da la controladora. 7. Entradas. Las entradas se encargan de recoger los datos suministrados por sensores externos y enviarlos al microcontrolador de la placa. Las salidas las utilizaremos con «sensores» tipo interruptores, pulsadores, LDR, NTC, PTC... Las controladoras Enconor disponen, en general, de dos tipos de entradas, las digitales y las analógica. Entradas Digitales. La controladora dispone de ocho entradas digitales que pueden tomar dos estados, que esté conectada la entrada (0) o que no esté conectada la entrada. Para activarlas basta unir sus dos terminales mediante un hilo conductor o similar. No debemos de conectar ninguna tensión a estas entradas. Las salidas digitales son los contactos de un relé, por lo que no suministran ningún tipo de tensión. En estas entradas conectaremos sensores digitales como interruptores, pulsadores... La conexión se realiza según el siguiente gráfico. E1 E2 E3 ORDENES DE CONTROL. Las principales órdenes de control son: <Entrada n> ó <entrada n> (Siendo n un valor comprendido entre 1 y 8): Devuelve «CIERTO» si la entrada está conectada y «FALSO» en caso contrario. <EsperaOn n> ó <esperaon n> (siendo n un numero entre el 1 y el 8) : El programa queda parado esperando que se active la entrada n. Cuando se activa, el programa sigue su curso. <EsperaOff n> ó <esperaoff n> (siendo n un numero entre el 1 y el 8) : El programa queda parado esperando que se desconecte la entrada n. Cuando se desconecta, el programa sigue su curso. Entradas Analógicas. Nos encontramos con cinco entradas analógicas con un margen de tensión de lectura de 0 a 5 V, esta entradas nos permiten evaluar la tensión que existe en ellas, para de esta forma actuar en consecuencia con alguna salida. Ojo no debemos de sobrepasar la tensión máxima, podríamos dañar el circuito. Si conectamos entre GND y la entrada analógica correspondiente una tensión comprendida entre 0 y 5 V nos mostrará en la pantalla un valor comprendido entre 0 y 255 equivalente al valor de tensión conectada a la entrada. La precisión de lectura es de 19.5 mV (5V/256). La siguiente tabla nos muestra los valores obtenidos según el voltaje de entrada, tanto en decimal como en binario. Voltaje de Entrada Nº Decimal Nº Binario 0V - 19.5 mV 0 00000000 19.5 mV - 39 mV 1 00000001 39mV - 54,5mV 2 00000010 .... ..... 255 11111111 ..... 4.98 - 5V En estas entradas conectaremos sensores como LDR, termistores (NTC, PTC) y potenciómetros. Es conveniente conectar a GND las entradas analógicas que no se vayan a utilizar. Para conectar un potenciómetro se utilizará en sus extremos una tensión fija y la salida del cursor a una de las entradas analógicas. GND EA1 +5V Potenciómetro Para la conexión de sensores como LDR o termistores se procederá como en el gráfico. (En este caso con alta luminosidad el valor de la tensión en la entrada analógica será alto. Cuanto menor sea la luminosidad menor será la tensión en la entrada analógica) +5V EA1 LDR GND Resistencia (10K) ORDENES DE CONTROL. Las principales ordenes de control son: <LeeAnalogica n> ó <leeanalogica n> (siendo n un número entre el 1 y el 255): Devuelve el valor de 8 bits de la entrada analógica especificada en el número n. La tensión en las entradas analógicas puede variar entre 0 y 5 voltios, por lo que la precisión en la lectura será de 0,0195 voltios. Ejemplos: <escribe leeanalogica 2> Aparece en pantalla el valor (de 0 a 255) correspondiente al valor de tensión existente en la entrada analógica 2. <si ((leeanalogica 2) > 140) [escribe [Valor alto de tensión]]> Mostrará en pantalla el mensaje <valor alto de tensión> si el valor que se lee de la entrada analógica 2 es mayor de 140 (2,74 voltios). En caso contrario no se visualiza nada. 8. Consejos de mantenimiento. Asegúrese de cumplir las siguientes recomendaciones para mantener en óptimas condiciones la tarjeta de control: *No golpee ni exponga a movimientos violentos la tarjeta de control. * Desconecte el ordenador y la tarjeta de control de la tensión de red, antes de proceder a la conexión o desconexión de la tarjeta en el puerto de impresora. *Cuando no esté utilizando la tarjeta de control desconecte el alimentador de la toma de red. * A la hora de desconectar los equipos, desconecte de la red primero la tarjeta de control y posteriormente el ordenador. * Evitar la utilización de la tarjeta en lugares donde exista agua o líquidos. * No manipule con las manos la tarjeta (tocando las pistas del circuito impreso) mientras el equipo este conectado. * Siempre que conecte o desconecte algún circuito con la tarjeta, asegúrese de que la alimentación de la tarjeta está desconectada. * Al conectar o desconectar circuitos con la tarjeta, asegúrese de que no se producen cortocircuitos entre los cables a conectar y los componentes de la tarjeta. 9.- Documentación. Alfredo Perucha Sanz. Tecnología 3º ESO. Ed. Akal. (2002) Manual Controladora Educativa Enconor Plus.