Robot CY 1206iL
Anuncio

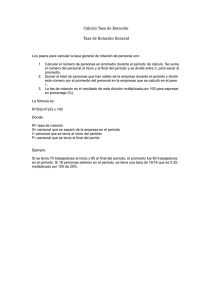
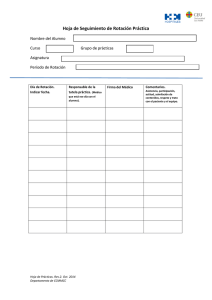
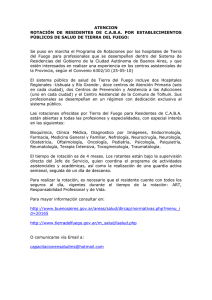
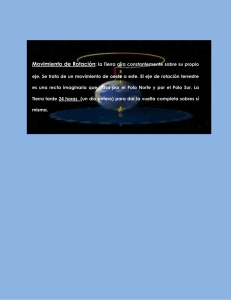
El robot de soldadura por arco CY 1206iL mejora su productividad gracias a su gran velocidad. Su amplia cobertura de trabajo y la flexibilidad de sus desplazamientos son ideales para las células de trabajo compactas. La versión alargada CY 1206iL se adapta perfectamente a una gran variedad de piezas voluminosas. CY 1206iL Fuerte carga La capacidad de carga al puño es de 10 kg para la inercia admisible al puño, el aumento es de 160%. Una carga adicional de 20kg se puede instalar en el eje 3 así como 30kg sobre la base del eje 2. Opciones para aplicaciones específicas Están disponibles diversas opciones para optimizar los rendimientos de ciertas aplicaciones: Coordinated Motion, permite un desplazamiento conjunto entre posicionador y robot, TIG Welding package y ARC SENSOR (seguido de junta a través del arco) autorizan funcionalidades incrementadas en soldadura. Gran cobertura de trabajo El CY 1206iL tiene una carrera vertical de 2770 mm para una carrera horizontal de 1074 mm. Pudiendo el eje 3 alcanzar la zona posterior, un montaje invertido incrementa su espacio de trabajo. Tiene, entonces, una carrera vertical de 3187 mm y una carrera horizontal de 1329 mm. CARACTERISTICAS TECNICAS Ítem CY 1206iL Tipo Poliarticulado Ejes controlados 6 ejes (J1, J2, J3, J4, J5, J6) Radio de acción 1813 mm Instalación (Nota 1) En el suelo, en el techo, en la pared, en el ángulo Carga útil 10 kg Margen de movimiento Rotación eje J1 (Nota 2) 330° (140°/s) (velocidad máxima) Rotación eje J2 240° (140°/s) Rotación eje J3 (Note 3) 410 ° (140°/s) Rotación eje J4 400° (330°/s) Rotación eje J5 280° (330°/s) Catálogo Oerlikon - 1 - Momento máx. al puño Inercia máx. al puño Rotación eje J6 (Note 4) 900° (450°/s) Eje J4 2.2 kgfm (22.0 Nm) Eje J5 2.0 kgfm (19.6 Nm) Eje J6 1.0 kgfm (9.8 Nm) Eje J4 5.3 kgfcms² (0.52 kgm²) Eje J5 4.3 kgfcms² (0.42 kgm²) Eje J6 1.2 kgfcms² (0.12 kgm²) Tipo de motorización Servomotores eléctricos de corriente alterna Repetibilidad 0,1 mm Peso (Nota 5) 370 kg Medio ambiente Temperatura ambiente: 0 – 45°; Humedad ambiente (Nota 3): Normal: < 75% Aceptable para un mes: < 95% Vibraciones : 0.5 G máx. Nota 1: Para los robots instalados en la pared y en ángulo, las carreras de los ejes J1 y J2 están limitadas. Nota 2: Rotación de 360° sobre el eje 1 es posible opcionalmente. Nota 3: Las carreras de los ejes J2 y J3 están limitadas por el ángulo del eje J1. Nota 4: La carrera ilimitada del eje J6 es opcional. Nota 5: Controlador incluido. Vista de frente Catálogo Oerlikon - 2 - Vista de lado Vista desde arriba Catálogo Oerlikon - 3 -