grua marina - Universidad de Cádiz
Anuncio

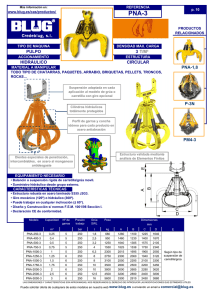
APLICACIONES PRACTICAS DE UNA GRUA MARINA A LA DOCENCIA EN INGENIERIA MECANICA Raúl Martín García; Antonio Illana Martos; Fco. Javier Vicario Llerena; José Cano Infante. Departamento de Ingeniería Industrial e Ingeniería Civil Universidad de Cádiz [email protected]; Tfno.: 956028034; Fax 956028038. Esta comunicación muestra una forma de hacer más prácticas las asignaturas que se imparten en la Universidad, y concrentamente en el área de conocimiento de Ingeniería Mecánica. Se pretende con ello acercar al alumno la realidad práctica de la mecánica industrial y contribuir de alguna manera a la mejora en su formación. Existen muchos profesores que además de la docencia desarrollan una actividad industrial de la que se puede sacar mucho partido aportando casos prácticos reales de la industria exterior al interior del aula. La mayoría de los ejercicios que se realizan en las escuelas de ingeniería tienen como base los textos clásicos de la mecánica (Beer & Johnston, Riley Sturges, etc.), los cuales contienen multitud de ejercicios de ingeniería mecánica que han servido durante muchos años para la formación inicial y fundamental de los ingenieros. Sin embargo, son ejercicios individuales, esto es que no se localizan en un contexto de interrelación con otros ejercicios de otras áreas de la misma ingeniería mecánica. Además, son a veces demasiado teóricos, abusando del plano y de la esquematicidad. No decimos que esto sea malo, pues creemos que este tipo de ejercicios es necesario como punto de partida. Pero a medida que se supera el nivel inicial de fundamentos, creemos muy beneficiosa para el alumno una asimilación de ejercicios enfocados, cuanto más mejor, a la realidad práctica con la que se van a encontrar en la industria, donde van a tener que situar el problema en el contexto general de la obra, relacionarlo con otras disciplinas de la mecánica para ver como inciden en las mismas, etc.. El alumno obtiene así una formación de carácter más práctico que le ayudará a desarrollar determinadas habilidades y capacidades, consiguiendo así un mejor desenvolvimiento a la hora de tener que resolver determinados problemas de ingeniería mecánica en el mundo industrial. Como metodología empleada para conseguir nuestro objetivo, en primer lugar mostraremos al alumno el funcionamiento general de la grúa marina, protagonista de nuestro trabajo, desde el punto de vista mecánico para situarlo en el contexto general. Posteriormente y una vez conocido el funcionamiento, plantearemos al alumno determinados ejercicios que consideraremos serán de aprovechamiento para el mismo. De estos, sólo resolveremos uno a modo de ejemplo, ya que lo que pretendemos como base no es mostrar una serie de ejercicios resueltos, y sí mostrar un caso práctico que sirve para orientar unos conocimientos a la práctica. Animamos a nuestors colegas deprofesión que disponen por los motivos que sea de determinada información práctica, que la gestionen adecuadamente (empleo de cámara digital, software de trabajo, etc.) y la lleven al aula, para el consiguiente aprovechamiento por parte del alumno. Es decir, animar a acercar de esta manera la industria al aula con menos material teórico y más real, fruto del trabajo en profesional. Esto por supuesto que es de interés no solo para el campo de la mecánica, sino para todos los campos, como Medicina, Empresariales, Derecho, etc.. 1. ANTECEDENTES E INTRODUCCION La inquietud que lleva a la realización de esta comunicación viene como consecuencia de la realidad práctica de la que adolecen muchas asignaturas que se imparten en la formación técnica universitaria, y más concretamente en la especialidad de mecánica. La causa reside fundamentalmente en la falta de medios, equipos y laboratorios para la simulación de aspectos mecánicos, y en la falta de colaboración entre Universidad y Empresa. El resultado es que muchos alumnos formados en centros universitarios tienen una formación muy buena en aspectos teóricos que se ve descompensada con la formación y realidad práctica. Un alumno que ha cursado asignaturas técnicas en ingeniería mecánica puede llevar conceptos más que sobrados sobre el diseño, funcionamiento y mantenimiento de un determinado mecanismo, pero a la hora de la verdad, de enfrentarse en la práctica al mismo, a su diseño, a su funcionamiento, a su mantenimiento, se encuentra con serios obstáculos, consecuencia de los inconvenientes mencionados anteriormente. Además, el alumno pocas veces conecta lo aprendido en unas asignaturas con otras con la consecuente falta de interdisciplinariedad y de asimilación de un contexto global práctico como el que se encontrará al terminar su formación en la industria. 2. OBJETIVOS El objetivo primordial de esta comunicación es contribuir hacer las asignaturas más prácticas, acercando así al alumno a la realidad práctica de la mecánica industrial, y contribuyendo de alguna manera a la mejora de la calidad en su formación. Para ello nos basaremos en el aprovechamiento práctico de una grúa marina real que desempeña su actividad actualmente en el Puerto Deportivo de Sotogrande. Existen muchos profesores que además de la docencia desarrollan una actividad industrial de la que se puede sacar mucho partido aportando casos prácticos reales de la industria al interior del aula. En primer lugar mostraremos al alumno el funcionamiento general de la grúa desde el punto de vista mecánico. Posteriormente y una vez conocido el funcionamiento, plantearemos al alumno ejercicios de índole mecánico situados en un contexto general basados en el diseño, funcionamiento y mantenimiento de dicha grúa. Dichos ejercicios tendrán carácter real (dimensiones, cargas, etc.) buscando siempre la implicación del alumno en la práctica. Serán expuestos de manera que acerquen la realidad lo mejor posible, mediante aprovechamiento de recursos informáticos, que reflejen la parte de la grúa actuante correspondiente. Se pretende que el alumno interprete y sitúe un problema determinado en el contexto general del sistema, y lo resuelva tomando conciencia y práctica de la disciplina de su problema con las otras que interactúan con ésta. Además de situar al alumno en la práctica real, estaremos fomentando el concepto de interdisciplinariedad en la resolución de un particular dentro del general. Este aspecto innovador tratará de diferenciar nuestros ejercicios de los típicos que se exponen en los libros más conocidos de mecánica, sobre todo en el aspecto de contexto e interdisciplinariedad de aspectos mecánicos. Por ejemplo un ejercicio consiste en la identificación e interpretación del reductor de velocidad de los motores hidráulicos que se encargan de trasladar la grúa (medida de los dientes, módulo, relación de transmisión, etc.). El alumno relacionará los conceptos aprendidos en ingeniería mecánica con su aplicación a un caso real, con el consiguiente acercamiento a la realidad práctica. Además, experimentará la interrelación mecánica - hidráulica - estructura. 3. CONTENIDO 3.1. PRESENTACIÓN DE LA GRÚA MARINA. La Grúa Marina protagonista de esta comunicación constituye un elemento imprescindible en el Puerto Deportivo de Sotogrande (Cádiz). Su misión es transportar del mar a suelo firme a las embarcaciones deportivas de las proximidades de Sotogrande. Esta actividad permite al personal del PDS realizar las correspondientes tareas de reparación y mantenimiento, con el consiguiente beneficio económico. Actualmente el PDS cuenta con una demanda de trabajo bastante grande a la vez que exigente. Esto acrecienta el protagonismo de la Grúa Marina o Travelift ya que una Puerto Deportivo de Sotogrande parada por avería ocasionaría bastantes costes por pérdida de trabajo, que acudirían en tal caso a otros puertos deportivos de la zona como Club Náutico de Algeciras, Puerto Banus e incluso Puerto Sherry. Esto se traduce en altos costes no sólo por la pérdida actual de la tarea, sino también por la probabilidad de que el cliente no vuelva. La grúa desempeña su función desde 1987. Desde entonces ha tenido una actividad continua, realizando una media aproximada de 125 transportes mensuales. Hace 6 años se le reforzó la estructura principal, para alzar naves de 180 toneladas. Desde el punto de vista ingenieril se distinguen en la grúa las siguientes partes: • • • Imagen 1 Sistema Estructural: debe garantizar que se resista la carga de manera estable en el tiempo. Sistema Hidráulico: encargado de aportar la potencia necesaria al sistema mecánico. Sistema Mecánico: encargado de garantizar todos los movimientos con o sin carga de la grúa mediante el aprovechamiento y conversión de la energía hidráulica en mecánica. Para entender el funcionamiento de la grúa, pasaremos a desarrollar cada uno de estos sistemas por separado. 3.1.1. SISTEMA ESTRUCTURAL La estructura de la grúa se aprecia en imagen superior. Sobre dicho sistema van dispuestos los otros dos sistemas, hidráulico y mecánico. Como hemos comentado está compuesto por el pórtico principal, a popa, del que salen dos pórticos laterales menos rígidos, a modo brazos; los cuales contienen la maquinaria. Este sistema es el que menos vamos a tratar, por estar enfocada la comunicación a la mecánica de máquinas. Sólo lo tendremos en cuenta en la obligada interactuación de dicho sistemas con los otros dos, mecánico e hidráulico, que si desarrollaremos con más profundidad. No obstante, comentar que el peso propio va a influir sobre los requerimientos de potencia para levantar el conjunto o trasladarlo. Más importantes son las influencias de la falta de rigidez, provocada por la elevada carga y la imposibilidad de cerrar la zona de proa con otro pórtico. Cuando la grúa carga la estructura se deforma: el pórtico de popa es bastante rígido, pero los laterales se abren de popa hacia proa en la zona inferior y se van cerrando por arriba. En consecuencia, las columnas se inclinan, provocando desalineamientos en diversas juntas cinemáticas. Cuando la grúa está parada, el rozamiento neumáticos-solera se opone a las deformaciones en la zona inferior, a costa de esfuerzos axiales en las ruedas y en sus bujes. En movimiento, sobre todo en la maniobra de giro, se produce la antedicha pérdida de verticalidad, la cual afectará en la maniobra de descarga al alineamiento vástago-cilindro de los gatos, así como a las zapatas de apoyo de los gatos. 3.1.2. SISTEMA HIDRÁULICO Es el responsable de aportar la potencia necesaria para las diferentes funciones de la grúa. Estas funciones vienen representadas por las secciones de potencia siguientes: Sección A. Levantar grúa con o sin barco. Es necesario levantar la grúa evitando así el contacto de los neumáticos con el suelo para permitir así el giro de los mismos (Sección B). Para ello se dispone de 12 gatos o cilindros de elevación de doble vástago y dos cuerpos, 6 a babor y 6 a estribor. Cuando la grúa este elevada nunca podrá actuar la traslación Imagen 2 Sección B. Movimiento de giro de los bloques de neumáticos. Una vez ha actuado la sección A, lo puede hacer la B, girando cada bloque de neumáticos un ángulo determinado. Se trata de orientar las ruedas para que la grúa se pueda mover en sentido axial, transversal o girando sobre el sitio, consiguiendo así reorientar la grúa en la dirección deseada. El giro de cada bloque lo realiza un brazo hidráulico compuesto de dos cilindros de doble efecto acoplados, con tres cámaras en total. Las imágenes 3 y 4 muestran dicha situación. Imagen 3 Imagen 4 Sección C. Levantar barco. El barco es levantado mediante cables y cabrestantes (imagen 7), accionados por motores hidráulicos. El tambor donde se enrolla el cable se ancla mecánicamente cuando no actúa el motor, de modo que esta sección no requiera potencia una vez que el barco esté completamente levantado, asegurado y listo para ser transportado. Sección D. Movimiento de traslación de la grúa. Con carga o sin carga, para la traslación de la grúa se dispone de 4 mecanismos de cadena (accionados por 4 motores hidráulicos respectivamente), que accionan los 4 bloques de neumáticos situados en las esquinas (dos a cada banda). La imagen 5 muestra la cadena de traslación y su tensor de tornillo. Imagen 5 Sección E. Movimiento de los carros de pastecas fijo y móvil. Los carros de pastecas se mueven en vacío mediante dos motores pequeños. Las pastecas son 2 fijas (proa) y dos móviles (popa), y se reparten entre sí la carga de hasta 180 T. La imagen 6 muestra los carros fijo (derecha) y móvil (izquierda). Las imagen 8 muestra el motor hidráulico y la cadena que acciona dichos carros. Cuando la grúa tenga carga no deberá poder actuar esta sección. Si se deberá permitir el giro de las ruedas. Imagen 6 En general y por motivos de seguridad, cuando esté actuando una sección no deberán poder hacerlo cada una de las restantes. Todas las secciones son independientes, de manera que nunca actuarán dos a la vez. Podemos pues direccionar toda la potencia disponible a la sección que en cada momento lo requiera. El sistema está compuesto por los siguientes elementos: Un motor diesel marca VOLVO TWD 630 VE, de 126 CV a 1500 rpm. Una bomba volumétrica de cuatro cuerpos. Un conjunto de electroválvulas de direccionamiento del fluido, así como válvulas de seguridad, etc. Actuadores finales formados por cilindros y motores hidráulicos. Limitadores de presión así como de las válvulas de seguridad correspondientes. Puntos y dispositivos de medida adecuadamente situados. A continuación se describen esquemáticamente las maniobras: Carga: 1. Elevación gatos 2. Cabrestantes (elevación barco) 3. Bajada gatos Traslación (en carga): 1. Movimiento grúa axial Giro: (en carga) 1. Elevación gatos 2. Actuadores giro 3. Bajada gatos Descarga: 1. Elevación gatos 2. Bajada por gravedad aguantando contrapresión el circuito (bajada el barco) 3. Subida gatos hasta posición reposo 3.1.4. SISTEMA MECÁNICO Debe transmitir la potencia suministrada por el fluido hidráulico, según unos movimientos y fuerzas adecuados. En correspondencia con las secciones descritas en el sistema hidráulico tenemos: Sección A. Levantar grúa con o sin barco. La cinemática es elemental, salvo en que se debe atender como afectan las deformaciones de la estructura. En cuanto a la máxima fuerza que debe vencer cada gato (imagen 2) es un problema hiperestático estructural, cuya solución (unas 28 toneladas) es uno de los datos para su selección. Sección B. Movimiento de giro de los bastidores de neumáticos. El giro de los bastidores se realiza en vacío, cuando los gatos soportan todo el peso. Por consiguiente los brazos hidráulicos ejercen fuerzas comparativamente muy pequeñas. En cambio es de gran interés el problema cinemático. La traslación transversal de la grúa requiere un giro de 90º de cada bastidor, respecto a su posición normal; pero el giro sobre sí misma precisa que cada bastidor se oriente en perpendicular al centro de giro, y por tanto rote un ángulo distinto respecto de la posición normal. Ello se consigue mediante unas carreras distintas en cada brazo. Con el centro de giro en el centro de la planta de la grúa bastaría con tres juegos distintos de brazos hidráulicos. Sección C. Levantar barco. Se trata de una transmisión mediante cables. Se coge el barco por su casco mediante dos juegos de eslingas (correas). Cada extremo de estos juegos se levanta mediante un polipasto de cable único y seis Imagen 7 poleas (12 ramales). El cable se va enrollando en un tambor (imagen 7) accionado mediante motor hidráulico. El centro de gravedad de la carga puede estar desplazado, y un sólo polipasto puede soportar hasta 80 toneladas. La tensión del cable sólo superará ligeramente una duodécima parte de esta carga. Movimiento de traslación de la grúa. La traslación de la grúa se realiza por medio de transmisiones por cadenas (imagen 4) en cada uno de los bloques extremos, cuatro en total, dos a popa y dos a proa. El resto de bloques van libres. Hay que comentar que en realidad los bloques intermedios no aportan nada a la tracción. De hecho los tipos de grúas marinas que se fabrican actualmente no llevan tantos bloques de ruedas, sino que se limitan a los cuatro bloques extremos, en comparación con los doce de nuestra grúa. De todos modos, el pavimento del puerto exige que la carga no se concentre en cuatro únicos puntos porque en tal caso la consecuencia sería un desgaste extraordinario y rápido y continuo del suelo, con el consiguiente gran coste económico. Movimiento de los carros de pastecas. Para la correcta sujección del barco se disponen en cada pórtico lateral, de una pasteca fija y otra móvil (imagen 9). Esta última permite el ajuste de la carga. El movimiento de dicha pasteca se consigue con un motor hidráulico que acciona una cadena (imagen 8). Imagen 8 Imagen 9 3.2. EXPOSICION DE POSIBLES EJERCICIOS A continuación mostraremos algunos tipos de problemas que podemos sacar de la grúa para llevarlo a la clase. LOCALIZACIÓN APROXIMADA DEL C.D.G. DE LA ESTRUCTURA. CÁLCULO DE LAS TENSIONES QUE ACTÚAN EN LOS CABLES DE LAS PASTECAS CON UN DETERMINADO BARCO EN CARGA. ESTIMACIÓN DE LA CARGA DE ROTURA PARA UNA CADENA. POTENCIA DESARROLLADA POR LOS DIVERSOS ELEMENTOS DE UNA TRANSMISIÓN EN LA MANIOBRA DE ALZADA DEL BARCO. IDENTIFICACION DE LOS REDUCTORES DE VELOCIDAD ENCARGADOS DE LA TRASLACION CÁLCULO DEL ÁNGULO DE DESVIACIÓN DE LOS NEUMÁTICOS EN LA MANIOBRA DE GIRO DE LA GRÚA. SELECCIÓN DE DETERMINADOS COMPONENTES DEL CIRCUITO HIDRÁULICO. 3.3. EJEMPLO DE EJERCICIO RESUELTO Para una mejor compresión el ejercicio se estructura como sigue: Objetivo: Obtener medidas de reductor formado por piñón de entrada de motor hidráulico y rueda de salida que acciona cadena que acciona ruedas para traslación de la grúa. Estas medidas serán necesarias para tareas de diseño así como para identificar perfectamente el reductor (módulo, paso, relación de transmisión, etc.). Plan de trabajo: 1. 2. 3. 4. 5. 6. Desmontar motor hidráulico Interpretar colocación funcionamiento del reductor Obtener medidas piñón entrada (P) (Dext1, Dext2, N1, N2, etc.) Obtener medidas rueda salida (R). Nos llevamos rueda de repuesto que facilita el trabajo evitando desmontaje complejo total: retenes, etc. Obtener otras medidas (E, etc.) Realizar cálculos (módulos, pasos, relación de transmisión, etc.) Se incluyen fotos digitalizadas para mejor interpretación. Algunas permitirán estimar cualquier medida por comparación con otras conocidas (patrones de referencia). 1. Desmontar el motor hidráulico. En la imagen 10 se muestra el mismo. Imagen 10 2. Interpretar colocación funcionamiento del reductor La imagen 11 muestra los centros de ambas ruedas (piñón A y rueda B) y la distancia entre ejes E Imagen 11 Imagen 12 En imagen 12 se observa una zona-huella sombreada en piñón 1 a 47 mm en la que parece no atacar el diente. Asimismo muestra las dimensiones del piñón y se representa la zona donde se localiza la rueda 2 con un chaflán de entrada de 26 mm que restados a la profundidad total de 73 dan los 58 mm coincidentes con el ancho del piñón 1. La imagen 13 muestra las medidas del motor y la imagen 14 el detalle de alojamiento del piñón. Imagen 13 Imagen 14 3. Obtener medidas piñón entrada 1 (Dex1t, N, b) Utilizando los conocimientos teóricos previamente explicados sobre engranajes, así como la documentación correspondiente de cálculo (por ejemplo prontuario mecánico), desarrollamos los cálculos que solucionan el problema. Así, tenemos, Piñón (1): Engranajes cilíndricos rectos Dext1 = 80 mm N1 = 14 dientes Ancho del diente b1 = 58 mm Dext1 80 = =5 N 1 + 2 16 P1 = π ·M 1 = 3,14 · 5 = 15,70 mm M1 = Cálculos: Módulo M1 Paso P1 Diámetro primitivo DP1 Diámetro interior Di1 Espesor del diente e1 y espacio entre dientes c1 Altura total del diente h Imagen 15 DP1 = N 1 ·P1 π = 67,16 mm Di1 = DP1 − (2 M 1 ·1,167) = 55,49 mm P1 e1 = c1 = = 7,85 mm 2 h1 = M ·2,167 = 10,80 mm 4. Obtener medidas rueda 2. Dext 2 390 = =5 N 2 + 2 78 P 2 = π ·M 2 = 3,14 · 5 = 15,70 mm N 2 ·P 2 DP 2 = = 374.81 mm M2= Rueda (2): Engranajes cilíndricos rectos Dext2 = 390 mm N2 = 76 dientes Ancho del diente b2 = 38 mm π Di 2 = DP 2 − (2 M 2 ·1,167) = 363,14 mm Cálculos: Módulo M2 Paso P2 Diámetro primitivo DP2 Diámetro interior Di2 Espesor del diente e2 y espacio entre dientes c2 Altura total del diente h2 5. P2 = 7,85 mm 2 h 2 = M 2 ·2,167 = 10,80 mm e2 = c 2 = Obtener otras medidas (E, etc.) Distancia entre ejes E E= DP1 + DP 2 67,16 + 374,81 = = 220,98 mm 2 2 4. CONCLUSIONES FINALES Muchos profesores tienen un material muy valioso, bien fruto de su experiencia profesional en la empresa, o bien al que simplemente pueden acceder al mismo por su situación profesional. Y creemos, que dicho material tratado adecuadamente, puede ser introducido en el aula, consiguiendo los siguientes beneficios: Asignatura más prácticas, con sus consiguientes beneficios. Se acerca al alumno a la realidad industrial con todos los beneficios consecuentes en su formación. Mejor control del profesor sobre su trabajo profesional, ya que ha tenido que gestionar toda la información práctica propia del mismo, eliminando aquella que es excesiva o no aporta nada, clarificando y simplificando muchos aspectos de la misma, etc., ya que ésta tiene que se expuesta en público. El material obtenido puede ser difundido, permitiendo el intercambio de experiencias industriales a través de comunicaciones en congreso, etc.. Se obtiene una forma de aprovechar la conexión empresa-universidad a través del profesorado. 6. FUENTES DE DOCUMENTACION Información obtenida de trabajo OTRI (UCA) en Grúa protagonista de la comunicación (con el correspondiente permiso del Puerto Deportivo de Sotogrande) Materias para la calidad. Actas de las II Jornadas Andaluzas de calidad en la enseñanza universitaria. Desarrollo de planes de calidad para la universidad (Volumen I). ICE. Sevilla. Materias para la calidad. Actas de las II Jornadas Andaluzas de calidad en la enseñanza universitaria. Desarrollo de planes de calidad para la universidad (Volumen II). ICE. Sevilla. Máquinas. Cálculos de Taller. A.L. Casillas. Diseño en Ingeniería Mecánica. Joseph Edward Shigley, Charles R. Mischke. Mc Graw Hill