- Ninguna Categoria
ias noticias noticias noticias noticias noticias noti
Anuncio
Multi Programador en USB LAAmplificador REVISTA INTERNACIONALClase-T DE ELECTRONICA Y ORDENADORES Nº 291 4€ ClariTy 2x300 W Operador Silencioso al o lc igh py r .L. t. D 3 -1 98 : GU . 2001 Enero Febrero Marzo Abril Mayo Junio Julio Agosto Septiembre Octubre Noviembre Diciembre de s rio p ta pie ro uc ció n ar ep r od ,d ió ac lic up n, oa i lqu d ler e pa rte o in la e xpr esa aut ori za ció n de l os Todas las revistas del año 2001 en CD 0 DAB: diez años después Contenido Redacción VIDELEC, S.L. Dirección Eduardo Corral Colaboradores Jose Mª Villoch, Pablo de la Muñoza, Andrés Ferrer, José Muñoz Carmona. Coordinación Editorial Iberoa Espamer, S.L. Dirección Daniel Ripoll Publicidad Dirección: Julio Mollejo [email protected] Secretaria: Gema Sustaeta [email protected] Delegación Cataluña AD PRESS, S.L. Director: Isidro Ángel Iglesias Publicidad: Verónica Boada Comte d’Urgell, 165-167, B-1º-3ª 08036 Barcelona Tel.: +34 93 451 89 07 - Fax: +34 93 451 83 23 email: [email protected] Edita Nº 291 AGOSTO 2004 Montajes de Proyectos 6 Multi Programador 38 Amplificador Clase-T ClariTy 2x300 W 54 Operador Silencioso 58 Pocket Pong 70 Router de vías Larpress, S.A. Dirección de Producción Gregorio Goñi Dirección Financiero-Administrativa José María Muñoz C/ Medea Nº 4, 5ª planta (Edificio ECU) - 28037 MADRID Tel.: 91 754 32 88 - Fax: 91 754 18 58 Suscripciones y Pedidos: Belén Herranz Guío C/ La Forja, 27, 29. Pol. Ind. Torrejón de Ardoz - 28850 Madrid. España. Tel: 91 677 70 75 - Fax: 91 676 76 65 email: [email protected] Servicios Redacción y traducciones VIDELEC, S.L. Imprime IBERGRAPHI 2000 S.L.L. Distribución en España: COEDIS, S.A. Ctra. Nacional II Km. 602,5 - 08750 Molins de Rei - Barcelona. España Distribución en el Exterior Argentina Importador Edilogo S.A. Av. Belgrano 225, 1º, B C1276ADB Buenos Aires Chile Importador Iberoamericana de Ediciones, S.A. C/ Leonor de la Corte, 6035. Quinta Normal. Santiago de Chile México Importador y distribuidor exclusivo Compañía Importadora de Revistas S.A. de C.V. (“CIRSA”) Negra modelo Nº 6. Col. Alce Blanco Municipio de Naucalpan de Juárez. (53330) Estado de México Tel.: (52-55) 5360-4167 - Fax: (52-55) 5560-7774 Distribución Estados: Citem Distribución D.F.: Unión de Voceadores Portugal Importador Ediber-Edicao e distrib. de Public. L.D.A. Rua D. Carlos Mascarenhas, 15 - 1000, Lisboa Venezuela Distribuidora Continental Colombia Disunidas, S.A. Depósito legal: GU.3-1980 ISSN 0211-397X 31/Agosto/2.004 Reservados todos los derechos de edición. Se prohíbe la reproducción total o parcial del contenido de este número, ya sea por medio electrónico o mecánico de fotocopia, grabación u otro sistema de reproducción, sin la autorización expresa del editor. Las opiniones expresadas a lo largo de los distintos artículos, así como el contenido de los mismos, son responsabilidad exclusiva de los autores. Así mismo, del contenido de los mensajes publicitarios son responsables únicamente los anunciantes. Copyright=1996 Segment BV Articulos Informativos 32 Esto es Clase... 46 Diseño de Nuestro Propio Circuito Integrado (2) 62 Diez años después Regulares 20 Noticias 31 Ojeada al próximo número 37 PCB 45 Nuevos Libros 53 Libros 67 EPS 38 ClariTy Amplificador Clase-T 2x300 W 6 Multi Programador El tamaño determina todo 32 Esto es Clase... Amplificadores de audio, de la A a la T 62 Diez años después DAB en Europa 54 Operador Silencioso Para cambios de vías en modelismo y semáforos 58 Pocket Pong Un juego de televisión sin televisión 70 Router de vías Rutador para trenes de modelismo con un PC Multi Programador el tamaño determina todo Andreas Oyrer Los programadores de microcontroladores están dedicados normalmente a dispositivos de un fabricante en particular. Sin embargo, este multi-programador puede programar no solamente los más importante microcontroladores de rango medio de la casa Atmel (y pronto también los de la casa Microchip), sino también las memorias EEPROM. Gracias a su interfaz USB, la programación es sencilla, flexible y rápida. 6 elektor Este multi-programador está pensado para los requerimientos de un usuario semiprofesional. No ha sido diseñado para el rango completo de microcontroladores de un fabricante en particular, sino más bien para un uso general con microcontroladores estándar de ocho bits que tienen una capacidad de memoria limitada. El circuito es capaz de realizar la programación de microcontroladores de más de un único fabricante (actualmente de las casas Atmel y Microchip), así como memorias serie EEPROM. Como estos componentes utilizan diferentes tensiones y algoritmos de programación, esta característica todavía es algo inusual. "Semiprofesional" también significa que el programador dispone de una herramienta de desarrollo y que por lo tanto se puede utilizar mientras se están realizando tareas de depuración. El programador debe ser rápido, de manera que conseguir un programa que trabaje adecuadamente no suponga una tarea pesada. El programador también debe ser controlable, lo que se consigue a través de una interfaz USB. La interfaz hombremáquina (IHM) tiene una gran compatibilidad, lo que significa que el dispositivo trabajará sin problemas con versiones de Windows 98 SE en adelante. Todo lo que necesitamos para comenzar a trabajar con el multi-programador es un puerto USB libre en nuestro ordenador. El programador toma su tensión de alimentación del propio puerto USB (lo que quiere decir que se alimenta a través del bus), por lo que no se necesita ninguna fuente de alimentación adicional. El microcontrolador utilizado no tiene su propia memoria de programa, por lo que su aplicación interna se descarga directamente desde el ordenador, a través del puerto USB, cuando se realiza su conexión a dicho puerto. Esto significa que la actualización del programa de aplicación tan sólo elektor requiere cambiar el fichero correspondiente en nuestro ordenador. También es posible almacenar el programa de la aplicación en una memoria EEPROM sobre la placa del programador, a la que se accederá por medio del microcontrolador en el momento del encendido. En este caso, el puerto USB debe emplearse para volcar las nuevas versiones de la aplicación sobre la memoria EEPROM. Una característica especial de este proyecto es que el microcontrolador que tiene que ser programado no tiene porqué ser retirado del circuito de destino y colocado sobre el zócalo de programación. En su lugar, el programador dispone de dos interfaces ISP (“in-system programming”, es decir, “programación en el sistema”), una para los microcontroladores de la casa Microchip y otra para los componentes de la casa Atmel. Microcontrolador con USB En el corazón del circuito nos encontramos con el circuito integrado TUSB 3210 (IC1), de la casa Texas Instruments. Se trata de un microcontrolador compatible con el 8052, con una interfaz USB de gran velocidad (12 Mbits/s), que nos ofrece cuatro puertos de E/S, con ocho terminales por cada puerto, una UART, un temporizador de vigilancia y una interfaz I2C. El circuito integrado TUSB 3210 no dispone de su propia memoria flash, por lo que el programa de aplicación tiene que cargarse cada vez que se alimenta el dispositivo. El programa se carga en una memoria RAM de 8K por 8 bits (es decir, 8 Kbytes), por medio de un programa cargador de arranque interno. Esta carga se puede realizar a través de la interfaz USB o, como alternativa, el programa puede estar almacenado en una memoria serie EEPROM IC5 (una 24LC64). La memoria EEPROM está conectada a los terminales SDA y SCL de la interfaz I2C del TUSB 3210. Su contenido se lee cada vez que el dispositivo se reinicia y se copia en la memoria RAM del TUSB 3210. Si se utiliza la opción del puerto USB necesitamos disponer del controlador adecuado en el ordenador, de manera que podamos enviar el programa correspondiente al circuito integrado TUSB 3210. Independientemente de que el programa haya sido cargado desde una memoria EEPROM o desde el ordenador, una vez que todo el programa ha sido copiado sobre la memoria RAM, el programa cargador de arranque desconecta el dispositivo del puerto USB. Seguidamente, el programa almacenado en la memoria RAM se ejecuta y el circuito se reinicia sobre el puerto USB. Tensiones de programación El circuito integrado IC1 controla todas las señales de programación y las tensiones correspondientes sobre sus 32 terminales de E/S. Para poder generar las tensiones de programación requeridas para los distintos microcontroladores, la tensión de + 5 V, proveniente de la interfaz USB, se convierte a una tensión de, aproximadamente, 13 V, utilizando un regulador elevador. Normalmente, la tensión de salida del regulador de conmutación debe ser constante y de un valor de unos 12 V, pero el diodo colocado en el camino de realimentación del circuito integrado IC3 aumenta esta tensión de salida, debido a la caída de tensión de realimentación provocada por el diodo: esta tensión más elevada permite que se puedan programar microcontroladores PIC. Las tensiones de programación se conmutan, según se desee, utilizando transistores FET de canal P y de canal N. Así, podemos conseguir una tensión 7 62 17 R1 P0.0 PUR P0.1 1k5 1 39 10 P0.2 P0.3 18 2 4 D+ P0.4 P0.5 3 19 D– P0.6 P0.7 13 37 16 38 14 15 20 100n 100n IC1 RST P1.0 VDDOUT P1.1 P1.2 SUSP P1.3 VREN P1.4 R6 C4 180k 100k R7 C10 1 +5V 2 3 4 R15 2k2 2k2 R14 6 7 TEST0 P1.5 TEST1 P1.6 TEST2 P1.7 RSV P2.0 NC P2.1 NC P2.2 RSV P2.3 NC P2.4 NC P2.5 8 1 2 3 A0 A1 A2 IC5 P2.6 SDA SCL 5 11 6 12 63 24LC64 WC 7 1 10k IC4.F 13 P01 R13 12 PIN9 10 PIN5 R2 K1 USB-B +VCC +5V 100n 470Ω R3 180k 100k R8 R12 10k C3 +5V +5V PIN31 IC2 LP2950CZ-3.3 D1 ACTIVE PIN40 PIN1 PIN5 PIN9 +VCC 64 TUSB3210 SDA P2.7 SCL P3.0/S0/RX NC P3.1/S1/TX NC P3.2 P3.3 P3.4 4 8 9 21 S2 P3.5 S3 P3.6 SELF/BUS P3.7 43 P00 44 P01 45 P02 46 P03 47 P04 48 P05 X1 60 33p P00 5 2 39 P17 P22 3 38 P16 R10 P10 P23 4 37 P15 10k 31 32 P11 33 P12 34 P13 35 P14 36 P15 40 P16 41 P17 22 P20 23 P21 25 P22 26 P23 27 P24 28 P25 29 P26 30 P27 P30 57 P31 56 P32 55 P33 54 P34 53 P35 52 P36 51 P37 5 36 P14 6 35 P13 P26 7 34 P12 P27 8 33 P11 9 32 P10 10 31 11 30 12 29 13 28 P03 14 27 P04 15 26 P35 16 25 P34 17 24 P33 18 23 P32 19 22 P31 20 21 P30 P36 T1 P37 C12 33p X2 C11 33p MISO MOSI BS250 9 ISP (Atmel) D5 T2 1N4148 D4 IC4.D GND MCLR PIN1 BS250 P20 T3 BAT43 8 1 P02 +5V BS170 +5V +13V K3 R4 MCLR 10k T5 IC4.A P05 1 DATA PIN31 +5V R5 GND BS250 10k ISP (Microchip) D7 T4 1N4148 D6 PIN31 BS250 IC4.B +13V D2 18μH P06 3 1 CLK 2 1 ZIF Socket L1 MCLR P24 12MHz +5V SCK P24 +5V P21 P07 P25 RST PIN31 6 1 P06 T6 BAT43 4 BS170 OA5 R11 1 10k D3 SHDN LX SS 1N4148 UOUT VREF +5V PIN40 BS250 C8 CC C9 7 MAX734 16V T8 6 IC3 C7 59 C1 12MHz 40 50 58 K2 +13V PIN1 49 2 33p +5V R9 1 47μ C2 1 IC4.C X2 61 +5V IC4.E 11 P24 10k 3 X1 10μ 10V IC6 24 42 C6 100n PIN9 8 5 C5 47μ +5V T7 25V 4 1n 14 T9 BS170 5 IC4 = 7407 P07 C13 IC4 7 100n BS170 020336 - 11 Figura 1. El circuito integrado TUSB 3210 incluye una interfaz I2C y otra USB, por lo que la única circuitería adicional necesaria es un conversor ascendente y unos pocos transistores MOSFET. de 0, 5 ó 12 V en el terminal 1 o en el 31 del zócalo de programación. Para la señal MCLR, presente en el conector ISP K3, disponemos de una tensión de unos 13 V, que se utiliza para la programación de los PICs. Los diodos D5 y D7 reducen esta tensión hasta los 12 V: esta tensión más baja, se emplea cuando queremos programar los microcontroladores de la casa Atmel. Las puertas TTL (tipo 74LS07), con sus salidas de colector abierto, se utilizan para controlar los transistores FETs. Esto permite que nos aparezca una tensión de 0 V entre la puerta y la fuente del transistor, lo que nos asegura que el transistor estará totalmente desconectado. Si utilizásemos estas señales de manera directa, la tensión en los terminales de E/S del puerto sólo alcanzarían la tensión de 3,3 V, lo que proporcionaría una tensión puertafuente de sólo 10 V, con lo que el transistor continuaría conduciendo. 8 Algunos microcontroladores requieren una tensión de programación en la entrada de "reset" o en la entrada del cristal de cuarzo. En este caso, como puede ser el ejemplo del 90S1200, se necesita una tensión mínima de 0,85 VCC = 4,25 V ( si suponemos una tensión de alimentación de + 5 V) en la entrada de reset. Como el circuito integrado TUSB 3210 trabaja con una tensión de alimentación de 3,3 V, solamente puede proporcionar un nivel lógico alto de 3,3 V. Las puertas que quedan en IC4 se utilizan para producir un nivel de tensión más elevado que esté por encima de los 4 V. Zócalos de programación La mayoría de los componentes se pueden programar directamente sobre el zócalo IC5. El cristal de cuarzo X2 proporciona una fuente de reloj para los microcontroladores de la familia 89Cxx y 89Sxx de la casa Atmel. Debido al número limitado de terminales de E/S ofrecido por el circuito integrado TUSB 3210, sólo podemos llegar a programar un cierto número de microcontroladores. Sin embargo, también podemos llegar a programar microcontroladores de otro tamaño utilizando los conectores ISP. En una ojeada más detenida, podemos darnos cuenta de que no existe una conexión a masa en el terminal 10, tal y como lo requeriría, por ejemplo, un circuito integrado como el 89Cx051. Como la corriente de alimentación no es particularmente elevada durante el proceso de programación, es suficiente proporcionar un camino de masa a través del terminal P3.6 de IC1. La tensión es estable por encima del valor de masa, pero permanece constante y dentro de unos límites razonables. elektor Figura 2. El menú de configuración. Programa para el ordenador El programa que corre en el ordenador está escrito en Delphi 7. La opción de idioma en el menú (bajo “Setup”, como se muestra en la Figura 2), se puede configurar en inglés, francés o alemán. Esta configuración, junto con el resto de las configuraciones, se almacena en los registros y se vuelve a llamar, de Figura 3. Selección de dispositivo. 10 manera automática, cada vez que se ejecuta un programa de nuevo. También bajo la opción de “Setup” (Configuración) disponemos de opciones para controlar si deseamos leer los bytes de la firma lógica o si deseamos verificar el contenido de la memoria del microcontrolador, una vez que se ha hecho una programación. El tipo de componente se selecciona bajo la opción de menú “Device” (ver Figura 3). Bajo esta opción existen dos sub-menús disponibles: ”Socket“ (“Zócalo”) (por ejemplo, IC5) e “ISP connector” (“Conector ISP”) (por ejemplo, utilizando los conectores K2 y K3). Actualmente sólo está disponible la opción “Socket”. La siguiente opción está entre Atmel MCU y EEPROM serie. Bajo la opción “Atmel MCU” los modelos de microcontroladores que hay son 89Cx051, 89C5x, 89Sx y los dos microcontroladores 90S1200 y 90S2313. Por supuesto, se puede acceder a funciones tales como “bit de bloqueo” (“lock bit”) y bit de protección en programación (“fuse bit programming”). En los microcontroladores de la familia 89C5x sólo están disponibles los bits 1 y 2 para ser programados como bits de bloqueo, ya que no hay suficiente cantidad de terminales en el puerto del TUSB 3210 disponibles, de manera que permitan programar también un tercer bit de bloqueo. Por otro lado, en los microcontroladores de la familia 89Sx no se puede programar ningún bit de bloqueo. Si seleccionamos un modelo de microcontrolador 90S1200 ó 90S2313, cuando configuramos el segundo bit de protección se nos muestra en dos variantes: el bit de protección RCEN y el bit de protección FSTRT. Si se detecta el modelo de microcontrolador, de texto cambia para mostrar el nombre del bit de protección soportado por el dispositivo en cuestión. Si se ha seleccionado un dispositivo con memoria EEPROM serie, es posible que en algunos casos tengamos más de un modelo de componente que acabe con los mismos dígitos (los dígitos finales se corresponden con el tamaño de memoria). Sin embargo, los dispositivos de las series 24AAxx y 24CxxC, que tienen la misma capacidad de memoria, difieren en su tamaño de página, es decir, el número de bytes que forman una "fila" en la memoria que puede ser programada en un ciclo (aproximadamente elektor Figura 4. Usando la función “Detect Device” (“Detectar Componente”), se pueden mostrar en pantalla los bytes de la firma y otros datos adicionales, sobre la esquina superior derecha de la pantalla. 2 ms). Cuanto más grande sea el tamaño de página más rápido se realizará el proceso de programación. Todas las funciones específicas de la programación, como programar, verificar, borrar, leer, programar memoria EEPROM, leer memoria EEPROM, leer bits de bloqueo o de protección y detectar dispositivo, están disponibles directamente mediante los botones correspondientes o bajo el menú “Action” (Acción) (ver Figura 4). Si se ha seleccionado que el microcontrolador sea detectado de manera automática, entonces podremos verificarlo utilizando la opción “Detect Device” (Detectar Dispositivo). Esto provoca que los bytes que forman la firma del componente puedan ser leídos. Estos bytes y la información que contienen, incluyendo la capacidad de memoria, la tensión de programación y el número exacto de elementos, se muestran en la esquina superior derecha de la ventana de dicho dispositivo. Cuando se selecciona una acción, los bytes de la firma se leen en primer lugar, de manera automática, fuera del microcontrolador y antes de que la acción correspondiente haya sido ejecutada. La verificación del byte de firma puede ser inhabilitada desactivando la opción de “Read signaute bytes” (Leer bytes de firma), en el menú “Setup”. Esto puede ser necesario si un fallo en el microcontrolador hace imposible llegar a poder leer los bytes de firma. La acción “Read” (Leer) lee el contenido completo de la memoria del dispositivo en cuestión. El número de bytes que tienen que ser leídos viene determinado por la información obtenida en los bytes de firma, o con los distintos dígitos que configuran la parte final del código del componente y que está escrito en el encapsulado del mismo, en este caso el de una memoria EEPROM. Si, en el caso de que trabajásemos con un microcontrolador, no ha sido leído el byte de firma, se utiliza el tamaño máximo posible de memoria en la serie seleccionada. Por ejemplo, si se ha seleccionado la serie 89Cx051, se usarán 4 kbytes, ya que ésta es la capacidad de memoria del componente más grande de la serie, es decir, del 89C4051. Bajo la opción de menú “Buffer”podemos elegir que el dato almacenado en el búfer pueda ser modificado utilizando un editor hexadecimal (Buffer editable) o que el dato almacenado en el buffer esté sincronizado con el dato almacenado en el fichero que se acaba de abrir, antes de que se inicie cualquier acción de escritura o de verificación (Update buffer from file, es decir, Actualizar buffer desde fichero). HID La ventaja de una inicialización como dispositivo compatible HID es que no se requieren controladores específicos para Windows para conseguir que haya una comunicación de datos entre el ordenador y el programador. Las versiones de Windows 98 SE y sucesivas soportan este estándar. Bajo el estándar HID se realiza el intercambio de datos en los denominados informes. Durante la configuración del puerto USB 12 el ordenador proporciona un cierto número de descriptores. El descriptor del dispositivo incluye información del tipo ID Vendedor (VID), ID del producto (PID) y la versión de USB soportada por el dispositivo conectado. El descriptor de configuración incluye información del consumo de corriente del circuito y del número de puntos finales disponibles. El descriptor del informe proporciona el tamaño y el número de informes que tienen que ser intercambiados entre el ordenador y el programador. Este descriptor especifica cuántos bytes tienen que ser enviados o recibidos y la función del dispositivo conectado (ratón, teclado, joystick, memoria stick, etc.). Podemos encontrar información más detallada sobre USB y HID en la página web de USB, en: www.usb.org/home. elektor D5 HOEK2 K1 C1 C2 R3 D1 D4 T1 X1 HOEK3 T3 T2 C4 T8 T9 T7 IC1 IC5 D6 IC6 T4 T5 R11 020336-1 K2 T6 R5 R6 R8 R7 R4 C5 D7 R15 R14 R2 R1 D3 R13 R12 IC4 X2 R9 HOEK1 C11 R10 C13 HOEK4 C8 C9 L1 C7 K3 C12 C3 C6 IC3 IC2 D2 C10 Figura 5. Plano de montaje de componentes para la placa de circuito impreso de doble cara. nen que ser leídos. Por lo general, el tamaño viene especificado en kilobytes o kilobits. El programa almacenado en el programador puede deducir cómo interpretar el valor proveniente de los primeros bytes que han sido enviados. Después de cada acción el programador envía un número determinado de bytes de vuelta hacia el ordenador, para indicar que ya está listo para que se puedan enviar más datos o comenzar a ejecutar la siguiente acción. Programa para el programador Figura 6. Fino y delicado de soldar: el microcontrolador USB viene en un encapsulado SPFP de 64 terminales. Protocolo Por supuesto, es necesario el uso de un protocolo para asegurar que la comunicación de datos entre el ordenador y el programador se mantenga de manera correcta. El primer byte que se envía desde el ordenador hacia el programador contiene información del microcontrolador seleccionado o de la memoria elegida: el valor 1 es específico de la serie 89Cx051, el valor 2 de las series 89C5x y 89Sx. El segundo byte proporciona información de la acción seleccionada: 1 para leer los bytes de firma, 2 para borrar, y así sucesiva- 14 mente. Los bytes que continúan contienen información adicional de, por ejemplo, la tensión de programación para un microcontrolador 89C5x o el tamaño de página de una memoria EEPROM serie. Cuando pasamos a programación, se utiliza un byte adicional que proporciona la información del número de bytes que se van a enviar en cada paquete. Un byte adicional indica si el paquete de datos enviado es el último (si el byte es cero) o si se continúa con la transmisión de paquetes (el byte está a 1). Cuando estamos en el proceso de lectura, se envía al programador una cuenta del número de bytes que tie- El programa que se ejecuta en el programador ha sido escrito utilizando el compilador Keil μVision2 C. La rutina principal lo primero que hace es inhabilitar el temporizador de vigilancia y colocar todos los terminales del zócalo del programador a 0 V utilizando la función ResetProgrammer (). A continuación se configuran los registros del puerto USB. Cuando el programa del cargador de arranque, presente en el circuito integrado IC1, se completa, se desconecta del puerto USB haciendo que la salida del terminal PUR pase a nivel bajo, con lo que la resistencia R1 ya no mantiene los 3,3 V. El programa volcado debe configurar el bit SDW en el registro MCNFG para volver a activar esta salida: de esta manera el programador reaparece en el bus. A continuación, el ordenador envía un cierto número de llamadas de SETUP para identificar al dispositivo y configurar su interfaz USB. Estas llamadas son procesadas por el punto final 0. El dato transferido incluye la dirección única del dispositivo, la cual se utilizará a continuación para comunicar con el programador. Al mismo tiempo, también son transmitidos elektor Componentes soportados en la actualidad El programa interno del programador puede ser actualizado fácilmente a la última versión que haya, en cualquier momento: tan sólo necesitamos la nueva versión del programa en la memoria EEPROM y, si fuese necesario, cambiar también el programa que se ejecuta en el ordenador. varios descriptores hacia el ordenador durante la fase de configuración, proporcionando la información necesaria sobre el dispositivo y sus funciones y características. En esta información se incluye el descriptor de informe, el cual, en este caso, identifica al programador como a un dispositivo compatible HID. Una vez que todos los descriptores han sido enviados al ordenador, se completa la fase de inicialización de la interfaz USB en el dispositivo y se deja listo para comenzar a trabajar. La dirección de la transferencia de datos se especifica por medio de una llamada. Si el circuito integrado TUSB 3210 detecta una llamada IN, el dato, así como la información de estado o un paquete de datos, se envían desde el programador hacia el ordenador. Si se recibe una llamada de OUT, entonces el paquete de datos es desempaquetado por el programador y se carga sobre el componente del programador (asumiendo que esa ha sido la acción seleccionada). 16 Actualmente, el programa almacenado en el interior del programador es capaz de programar los microcontroladores y las memorias EEPROM que aparecen en los listados siguientes. Se espera que haya una nueva actualización en breve que soporte la programación de microcontrola- Rutinas de programación El dato recibido es descodificado por la rutina DecodeProgrammerData() en el fichero Prog.c. El primer byte del informe de 64 bytes, contiene el código para el microcontrolador seleccionado, mientras que en el segundo byte proporciona información sobre la acción deseada. Estos valores son utilizados para hacer una llamada a uno de los numerosos algoritmos de programación diferentes que existen para los distintos dispositivos, tal y como se muestra en las hojas de características de los microcontroladores. Cada serie de dispositivo tiene su propia rutina de encendido, la cual aplica la tensión de alimentación a los terminales correctos y configura las señales de programación utilizadas a los niveles definidos. Una vez que una determinada acción ha sido completada de manera exitosa, se hace una llamada a la rutina que reinicia el programador, la cual configura de nuevo todas las señales en el zócalo de pro- dores PIC y de componentes de la casa ATmega. Todo esto, junto con las futuras actualizaciones, se incluirá en el programa para ordenador disponible en nuestra sección descargas gratuitas de nuestra página web de Elektor, bajo el código de producto 020336-11. gramación a 0 V. Como, de manera general, se desea programar más de los 64 bytes contenidos en un informe, el ordenador debe enviar un paquete de datos adicionales hacia el programador tan pronto como el anterior ha sido procesado. El programador envía un mensaje, ya definido, hacia el programa que se ejecuta en el ordenador, para notificarle que puede enviar el siguiente paquete. En ese momento, el ordenador prepara el siguiente paquete informe y lo envía hacia el circuito. El último paquete que se envía al programador USB contiene un byte cero. Cuando se lee el dispositivo, los datos también son transferidos en informes de 64 bytes cada uno, donde el primer byte proporciona el número de bytes válidos en el paquete. La descripción anterior del funcionamiento del programa que se ejecuta en el programador, solamente puede dar una ligera idea de dicho funcionamiento. Para obtener información más detallada, tendremos que dirigirnos al propio programa donde podremos encontrar información comentada y claramente estructurada. Montaje y funcionamiento La colocación de los componentes sobre la placa de circuito impreso debería ser un juego de niños si no fuese por el pequeño circuito integrado TUSB 3210, que se suministra en un encapsulado del tipo S-PFPG64, con unos terminales realmente delgados. El proceso de soldadura para circuitos integrados SMD de este tipo, requiere no solamente una mano diestra, sino también nervios de acero y una buena cantidad de confianza en uno mismo. Una vez que hemos fijado el circuito integrado en su lugar con una gota de pegamento, elektor 6ªedición Premios de revistas ARI 2004 La Asociación de Revistas de Información convoca la Sexta Edición de los Premios de Revistas ARI, a la excelencia editorial, dirigidos a publicaciones y profesionales que desarrollen una labor en el medio revistas dentro del ámbito nacional. SOLICITAR LAS BASES EN: Asociación de Revistas de Información (ARI) Teléfonos: 91 360 49 40 • Fax: 91 521 12 02 E-mail: [email protected] www.revistas-ari.com Plaza del Callao, 4, 10º A (Palacio de la Prensa). 28013 Madrid Microcontroladores de la casa Atmel : 89C1051, 89C2051, 89C4051, 90S1200, 90S2313, 89C51, 89C52, 89C55, 89LV51, 89LV52, 89LV55, 89S53, 89S8252 debemos coger el soldador y hacer aquello que normalmente tratamos de evitar a toda costa: en lugar de soldar los distintos terminales del circuito integrado a sus correspondientes puntos de la placa, soldaremos todos los terminales juntos. Esto se debe hacer lo más rápidamente posible, de manera que el componente no llegue a alcanzar una temperatura demasiado elevada. Una vez que este gran cortocircuito presente en el circuito integrado se ha enfriado, pasaremos una malla de desoldar a lo largo de los terminales, e iremos retirando el exceso de estaño. De nuevo tendremos que tener cuidado en no dar demasiado calor al circuito integrado. Por último, nos equiparemos con una lente de aumento, que disponga de una buena luz, y con un multímetro. Usando este último verificaremos que todos los terminales han sido soldados correctamente y que no hay ningún cortocircuito presente entre cada terminal y sus terminales vecinos. Una vez que el circuito integrado TUSB 3210 ha sido soldado correctamente a la placa de circuito impreso, el resto del montaje de los componentes es relativamente sencillo. Todos los circuitos integrados (excepto el pequeño regulador de tensión), deberán ir provistos de su correspondiente zócalo. Incluso el zócalo con fuerza de inserción cero debería ir montado sobre un zócalo adicional en lugar de ir directamente soldado sobre la placa. Cuando hayamos completado el proceso de montaje y verificado e inspeccionado la placa, podremos pasar a realizar la primera prueba. Si ya disponemos de una memoria EEPROM programada, no necesitaremos usar ningún controlador para Windows. Si en este momento conectamos el programador al puerto USB del ordenador, el gestor de dispositivos nos debe presentar a nuestro programa- 18 Memorias EEPROMs: 24xx00, 24xx01, 24xx02, 24xx04, 24xx08, 24xx16, 24xx32, 24xx64, 24xx128, 24xx256, 24xx512 dor como un dispositivo compatible HID. En este momento ya estamos listos para programar nuestro primer microcontrolador. Si no se ha montado ninguna memoria EEPROM serie, el programa interno del programador debe volcarse por medio del puerto USB. El circuito integrado TUSB 3210 arranca el propio cargador de registros, con lo que Windows reconoce el nuevo dispositivo. A partir de este momento es cuando necesitaremos el controlador de dispositivos de la casa Texas Instruments. Este controlador (llamado TI Apploader Driver, es decir, Controlador TI Aploader), no se suministra como parte del disco que proporciona Elektor, ni se puede descargar de su página web. Sin embargo, sí que se puede obtener, de manera gratuita, de la página web de TI, www.ti.com. Seleccionaremos el directorio que contiene el fichero TUSB3210.inf e instalaremos el controlador, para lo cual descargaremos el fichero Aploader.sys y lo copiaremos en el mismo directorio. Por último, se nos preguntará por la ubicación del directorio que contiene el programa de trabajo e introduciremos el camino donde se encuentra el fichero TUSB3210.bin. Este fichero será copiado de manera automática en el directorio /System32/drivers, junto al fichero Aploader.sys. Si se vuelve a conectar ahora el programador, el controlador enviará el programa a ejecutar desde el fichero /System32/drivers/TUSB3210.bin. Después de un breve retardo, el código cargado comenzará a ejecutarse sobre el programador. En ese momento, el programador será enumerado de nuevo como un dispositivo compatible HID. LISTA DE MATERIALES Resistencias: R1 = 1k5 R2 = 470Ω R3,R6 = 180k R4,R5,R9-R13 = 10k R7,R8 = 100k R14,R15 = 2k2 Condensadores: C1,C2,C12,C13 = 33pF C3,C4,C5,C10,C13 = 100nF C6 = 10 μF condensador electrolítico de 16 V radial C7,C9 = 47 μF condensador electrolítico de 16 V radial C8 = 1nF Semiconductores: D1 = Diodo Led Rojo D2 = 0A5 o 1N5817 (Farnell # 573-097) D3,D5,D7 = 1N4148 D4,D6 = BAT43 IC1 = TUSB3210PM IC2 = LP2950CZ-3.3 o LE33CZ (Farnell # 302-4568) IC3 = MAX734CP IC4 = 74LS04 IC5 = 24LC64 IC6 = Zócalo ZIF (con ranuras amplias) T1,T2,T4,T5,T8 = BS250 T3,T6,T7,T9 = BS170 Varios: K1 = Conector para USB “B”, en ángulo recto para montaje en placa de circuito impreso K2 = Conector tipo “pinheader” de 6 terminales K3 = Conector tipo “pinheader” de 5 terminales L1 = Bobina de choque en miniatura de 18 μH X1,X2 = Cristal de cuarzo de 12 MHz PCB, Placa de Circuito Impreso, disponible a través de Servicio de Lectores Disco con los ficheros del proyecto para el ordenador y los ficheros con el código fuente, con código de pedido 020336-11. También se pueden obtener a través de la descarga gratuita de nuestra página web. (020336-1) elektor pubpress COMPLETA TU COLECCIÓN 279 280 281 282 283 284 285 286 287 288 289 290 Sí, deseo recibir contra reembolso los números de ELEKTOR que indico a continuación, al precio de portada, más gastos de envío. (Se servirán sólo los números que no estén agotados al tiempo de recibir la orden de pedido). Deseo Recibir los números: _______________________________________________________ Nombre:..................................... Apellidos:.................................................................................................... Dirección:..................................................................................................................... Nº:......... Piso:........... Tel.:.....................C.P.:............ Población:....................................................................................................... Provincia:...............................................e-mail:.............................................................................................. Enviar este cupón a LARPRESS, S.A. C/ La Forja, 27-29 Torrejón de Ardoz 28850 Madrid. Tel.: 91 677 70 75 Fax: 91 676 76 65 [email protected] Usted tiene derecho a acceder a la información que le concierne, recopilada en nuestro fichero de datos y a cancelarla o rectificarla de ser erronea. Si no desea recibir información comercial de esta u otras empresas, le rogamos nos lo haga saber mediante comunicación escrita con todos sus datos personales. ias noticias noticias noticias noticias noticias noti eMobility 2004® mostrará la aplicación práctica de la movilidad en el mundo profesional El III Congreso Internacional de Tecnología Móvil e Inalámbrica se consolida como referente en cuanto a nuevos desarrollos y sus aplicaciones. eMobility 2004®, III Congreso Internacional de Tecnología Móvil e Inalámbrica, reunirá del 10 al 12 de noviembre en el Centro de Convenciones Norte de IFEMA, y dentro del marco de SIMO TCI, a los principales actores del mercado de la movilidad. El Congreso se afianza en su tercer año de celebración como punto de referencia para los profesionales del sector, que encuentran en eMobility el foro ideal para el intercambio de conocimientos y experiencias relacionadas con la tecnología móvil, así como su aplicación en diferentes sectores de la economía. eMobility 2004 contará con importantes novedades que permitirán que los asistentes perciban de manera práctica las ventajas que las tecnologías móviles e inalámbricas suponen en el mercado profesional. Con este objetivo, eMobility 2004 se ha estructurado entorno a grandes bloques: - Sesiones horizontales, que se dividirán en los apartados de seguridad, aplicaciones para el usuario final, infraestructuras y aplicaciones empresariales. En estas sesiones se darán cita todos los actores que están tomando parte en el desarrollo de la tecnología: fabricantes, desarrolladores y usuarios provenientes de sectores como administración pública, consumo, banca, educación, integración de discapacitados, educación, logística o sanidad. - Exposición comercial, que reunirá a los actores que están 20 La tecnología móvil aplicada al mundo profesional. tomando parte en el desarrollo de estas tecnologías: proveedores de infraestructuras, fabricantes, desarrolladores, etc. - DeMobility es otra de las grandes apuestas en la nueva edición del Congreso. En un espacio de 400 m 2 y en un entorno realista, se expondrán físicamente las aplicaciones empresariales de las tecnologías móviles e inalámbricas que ya están disponibles e incluso funcionando. DeMobility contará con escenarios inalámbricos como un hospital, un hotel, un banco o un almacén entre otros. - CafeMobility: Un recinto en el que se combinan el área de descanso y café, donde el congresista dispondrá de equipamiento y ancho de banda suficiente para poder trabajar durante la jornada. IFEMA y Tech Events, organizan por tercer año consecutivo el Congreso Internacional de Tecnología Móvil e Inalámbrica, eMobility, que en palabras de Alfonso Acebal Neu, consejero delegado de Tech Events, “ofrece una respuesta profesional a las necesidades del sector, combinando, el desarrollo de seminarios, conferencias, charlas magistrales y demostraciones de producto con la exposición comercial a través de stands”. Después del éxito de las dos primeras ediciones del Congreso, y de que en el segundo año se aumentara en un 100% el número de empresas expositoras, la organización ha previsto un aumento de un 50% tanto en asistentes como expositores. III Edición Premios eMobility Este reconocimiento a las empresas o instituciones que apuestan decididamente por las tecnologías móviles e inalámbricas y están poniendo en marcha iniciativas en este sentido. Las categorías que serán premiadas este año serán: - Premio a la empresa o institución pública o privada que haya desarrollado o contribuido al desarrollo de una o varias aplicaciones móviles y/o inalámbricas con un fin de carácter eminentemente social - Premio a la pequeña empresa que haya desarrollado o contribuido a desarrollar una o varias aplicaciones móviles y/o inalámbricas que hayan ayudado de manera significativa a crear valor para alguna compañía o institución. - Premio a la empresa española que haya apostado decididamente por la tecnología móvil y/o inalámbrica creando valor para sus usuarios o clientes. - Premio a la institución u organismo público o privado que haya desarrollado o contribuido al desarrollo de una o varias elektor ias noticias noticias noticias noticias noticias noti aplicaciones móviles y/o inalámbricas que hayan ayudado a mejorar las condiciones de vida de los ciudadanos. Las candidaturas se aceptarán hasta el 22 de octubre de 2003. Sobre eMobility eMobility es el Congreso Internacional de Tecnología Móvil e Inalámbrica de referencia en nuestro país. Organizado por IFEMA y Tech Events desde 2002, eMobility reúne a los actores más importantes del mercado de la tecnología móvil e inalámbrica así como a empresas e instituciones pioneras en la implantación de éstas. En sus dos ediciones anteriores, más de 400 empresas han colaborado con eMobility y más de 2.400 asistentes han acudido a las sesiones paralelas y la exposición comercial. Para más información: FUNCORP CONSULTING Gustavo Higes Tfno: 91 702 09 11 Email: [email protected] IC cargador de batería con temporizador de carga redundante La familia SC802 protege a los productos portátiles alimentados por baterías de litio-ión / litio-polímero de posibles sobrecargas Semtech Corp., empresa representada en España por Anatronic, S.A., anuncia la disponibilidad de la serie SC802 de IC cargadores de batería litio-ión / litio-polímero. Los dos nuevos dispositivos se caracterizan por un temporizador de carga programable y un sensor de entrada de voltaje de termistor que permiten a los diseñadores programar funciones de finalización de carga para proteger productos portátiles de fallos en las baterías. Los diseñadores de productos portátiles pueden programar el cargador SC802 para finalizar la carga automáticamente después de cualquier espacio de tiempo de hasta seis horas. El sensor de entrada de termistor puede leer cambios de voltaje que indican condiciones térmicas cambiantes y puede finalizar la carga cuando estas condiciones superan los rangos programados. El SC802 protege a los productos portátiles. Al igual que el resto de IC cargadores de batería, el SC802 detecta automáticamente los niveles de voltaje en una batería e inicia una corriente de pre-carga para baterías completamente descargadas con menos de 2.8 V de potencia o una corriente de carga rápida para baterías con niveles superiores a 2.8 V. Una vez que la batería alcanza el 70% de capacidad, la corriente se reduce mientras el voltaje permanece constante, hasta que la batería está cargada totalmente. Cuando la carga se ha completado, el SC802 se queda en un modo ‘mantenimiento’ para garantizar que la batería permanece con toda su capacidad al conectar un adaptador de carga. El SC802 se caracteriza por un rango de voltaje de entrada de 14 V que elimina la circuitería de protección adicional requerida por otros cargadores de 5 V en el caso de fallo de los adaptadores. El nuevo IC cargador se encuentra disponible encapsulado MLP (4 x 4 x 0.9 mm) libre de carga que es ideal para teléfonos celulares, teléfonos inteligentes y PDA. MCU de 32 bit con controlador LCD color y USB 1.1 EPSON, empresa representada en España por Anatronic, S.A., introduce el S1C33L05 que, basándose en el núcleo RISC C33 de 32 bit, se caracteriza por 8 kB de RAM interna, un USB1.1 periférico, interface MMC y un convertidor A/D de 10 bit. El controlador LCD integrado con 40 kB de VRAM interna, que también puede ser utilizada 22 como memoria de sistema, soporta displays LCD monocromos y color con resoluciones QVGA de hasta 4 bpp. Si la memoria SDRAM externa se usa para ampliar el buffer de display del controlador LCD, es posible alcanzar una intensidad de 16 bpp. La memoria externa (SDRAM, SRAM, DRAM o Burst ROM) se puede incorporar al microcon- trolador mediante un bus de direcciones / datos con señales de selección de chip. Hasta siete periféricos se pueden planificar directamente en el espacio de memoria. El núcleo C33 ofrece funcionalidad DSP, usando la instrucción MAC (multiplicación y acumulación) interna. Esta característica permite un proceso rápido de los algoritmos que suelen ser requeridos por aplicaciones multimedia. La integración del controlador LCD ofrece una solución de bajo coste, pequeñas dimensiones y elevado rendimiento para dispositivos hand-held, equipos PDA y sistemas de display de capacidad media. Optimizado para aplicaciones con batería, el S1C33L05 ofrece muy bajo consumo en modo elektor y consigue 15 números pagando el precio de 12 También puedes renovar tu suscripción haciendo uso de nuestra... LÍNEA DE SUSCRIPCIONES pubpress 91 - 677 70 75 BOLETÍN DE SUSCRIPCIÓN Envíe este cupón a :Editorial LARPRESS S.A. C/ La Forja Nº 27 - 28850 Torrejón de Ardoz (Madrid) Tel.: 91 677 70 75 - Fax: 91 676 76 65 E-mail: [email protected] (Oferta válida únicamente en España. *Válido hasta fin de existencias) Deseo suscribirme a ELEKTOR por el período de un año. El precio de esta suscripción (48 €) incluye 15 números de la revista al precio de 12. DATOS BANCARIOS (si elijo domiciliación) Nombre y apellidos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Dirección . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . C. Postal . . . . . . . . Población . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Provincia . . . . . . . . . . . . . . . . .Teléfono . . . . . . . . . . . . . . . . . . . . . . NIF . . . . . . . . . . . . . . . . . . . . Edad . . . . . . . . . . . . . E-Mail . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . ❑ Particular ❑ Empresa . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . NIF . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . FORMA DE PAGO ❑ DOMICILIACIÓN BANCARIA ❑ CHEQUE A NOMBRE DE LARPRESS. S.A. adjunto a este boletín. ❑ CONTRA REEMBOLSO ❑ TARJETA DE CRÉDITO ❑ Visa ❑ 4B DATOS TARJETA: Nº. de la tarjeta Titular de la cuenta . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Banco o Caja . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Rogamos atiendan los recibos que les presente LARPRESS S.A., en concepto de suscripción de la revista. Firma del titular de la cuenta o tarjeta CUENTA LIBRETA Entidad Oficina DC (Imprescindible en pago con tarjeta y domiciliación) Número de cuenta caduca mes año Usted tiene derecho a acceder a la información que le concierne recopilada en nuestro fichero de datos, y rectificar si es errónea o cancelaria. Si no desea recibir información comercial de esta u otras empresas le rogamos nos lo haga saber mediante comunicación escrita junto con sus datos personales. ias noticias noticias noticias noticias noticias noti ‘run’ y ‘sleep’, aumentando los periodos stand-by y operativos para equipos móviles. Con la flexibilidad del esquema de expansión de memoria, la capacidad de sistema se puede escalar en función de los requerimientos de aplicación. El entorno de desarrollo para el S1C33L05 incluye un compilador C y un In-Circuit-Debugger fácil de usar que permiten a los diseñadores comprobar y depurar el código de programa en el propio sistema. Las tarjetas de desarrollo también poseen un display LCD y un conector USB. Basado en el núcleo RISC C33 incluye entre otras muchas cosas un USB1.1. Filtro SAW para Bluetooth La introducción de servicios de telefonía con tecnología UMTS requiere una supresión adecuada de su frecuencia de 2.1 GHz para Bluetooth, que opera a 2.4 GHz. Por estos motivos, EPCOS, empresa representada en España por Anatronic, S.A., anuncia el filtro SAW B7766 que supone una magnífica alternativa a los filtros cerámicos multicapa en aplicaciones con teléfonos móviles. El filtro, que mide 2.5 x 2.0 mm con una altura de inserción de 0.8 mm, tiene una salida balanceada y está optimizado para uso con chipsets Bluecore de CSR. La pérdida de inserción típica en la banda de paso de 2400 a 2483.5 MHz es de 3 dB, mientras que la atenuación de la banda UMTS alcanza los 40 dB. Además, la impedancia de salida balanceada de 50 _ simplifica el diseño de circuito. El nuevo filtro SAW está especificado para un rango de temperatura operativa de -40 a +85 °C. El B7766 supone una alternativa a los filtros cerámicos multicapa. Nuevo transistor PNP compacto El ZX5T2E6 aumenta la capacidad de gestión de potencia Zetex, empresa representada en España por Anatronic, S.A., anuncia el lanzamiento de uno de los primeros productos con proceso bipolar Generation 5, el ZN5T2E6, un transistor PNP que eleva las prestaciones de componentes con encapsulado SOT23-6 miniatura, logrando una capacidad de gestión de potencia de 70 W. Destacando por el bajo voltaje de saturación de Generation 5, gracias a una reducción de la resistencia, el 24 ZX5T2E6 ofrece a los diseñadores una solución eficiente para carga de batería, conversión DCDC y tareas generales de gestión de potencia. Este transistor PNP de 20 V destaca por un Vce(sat) máximo de -130 mV para un Rsat de 31 m_ y puede soportar una elektor cias noticias noticias noticias noticias noticias noti corriente continua de colector de 3.5 A. Su elevada capacidad hFE también ayuda a minimizar los requeri- mientos del drive, logrando, por ejemplo, que la ganancia a 1 A sea al menos 300. Esta última incorporación a la gama ‘Miniature Package Power Solutions’ de Zetex tiene un footprint de 3 mm_ y una altura off-board de 1.45 mm del encapsulado SOT236 para ayudar a los diseñadores a optimizar el tamaño de tarjeta. Nuevo chipset Parrot4 para aplicaciones inalámbricas multiservicio en entornos móviles Permite operación ‘manos libres’ con dispositivos personales Bluetooth en vehículos Atmel Corporation, empresa representada en España por Anatronic, S.A., y Parrot, S.A., anuncian la disponibilidad del Chipset de Gestión de Comunicación de Automoción Parrot4, que es el resultado de una colaboración entre ambas compañías, dirigida al diseño y producción de IC multiservicio leadingedge para uso móvil, incluyendo aplicaciones de automoción. El Parrot4 de baja potencia soporta funcionalidades GSM / GPRS, Bluetooth y GPS, así como CODEC analógicos de alta especificación y un DSP 50 MIPS para micrófonos y altavoces. GSM/GRPS, Bluetooth y GPS en un chip. ias noticias noticias noticias noticias noticias noti El Chipset Parrot4 es el núcleo de las innovaciones en telemática a bordo de vehículos, ofreciendo a la industria de la automoción una solución on-chip modular, fiable y económica para dispositivos electrónicos en vehículos. Diseñado para su inclusión en las líneas Parrot de kits de manos libres Bluetooth sin instalación para vehículos, el nuevo chipset permite el control inalámbrico de los teléfonos móviles. El Parrot4 se incluirá en las nuevas plataformas de Parrot CK3100, CK3300 y CK3500. El chipset ha sido fabricado usando la tecnología CMOS de Atmel, que maximiza las prestaciones y minimiza el consumo de potencia (13 μA en modo standby y entre 10 y 100 mA en modo operativo). El Parrot4, que incluye un núcleo DSP embebido, es un ejemplo de la estrategia SiliconCITY de Atmel para desarrollo y soporte ASIC. Para más información: Anatronic, S.A. Tel: 913660159 Fax: 913655095 E-Mail: [email protected] Solución de almacenamiento basada en Flash para telecomunicaciones, seguridad pública y transporte El disco Flash en estado sólido IDE 4000 reemplaza drives de disco duro en formatos 1.8 y 2.5” con capacidades de hasta 4 Gigabytes M-Systems, empresa representada en España por Ibérica de Componentes, S.A., anuncia el lanzamiento de su nuevo disco Flash en estado sólido, el IDE 400, que ofrece la solución de memoria basada en Flash más asequible para los mercados de telecomunicaciones, seguridad pública y transporte. Con un interface ATA en estuches de 1.8 y 2.5” y capacidades de hasta 4 Gigabytes, el IDE 4000 responde a la tendencia de estos mercados, ofreciendo formatos más pequeños y soluciones alternativas a los drives de discos duros convencionales. Los sistemas encontrados en los sectores de telecomunicaciones, seguridad pública y transporte requieren una tecnología fiable. El IDE 400 ofrece una alta integridad de datos, cumpliendo con NEBS level-3, y opera en altitudes elevadas, así como con shocks y vibraciones en rangos de temperatura industrial. Además del ahorro en los costes de mantenimiento en comparación con un drive de disco duro mecánico, el IDE 400 también mejora el nivel (y márgenes) total para productos que integran este nuevo producto. Al igual que las otras líneas IDE y SCSI de M-Systems, el IDE 4000 es un disco Flash en estado sólido state-of-theart diseñado para un reemplazo de discos duros mecánicos y soporta entrada / salida programada (PIO) y modos de transferencia de discos duro de acceso directo de memoria (DMA). Discos de estado sólido de hasta 4 Gigabytes. Tarjeta PC ATA Flash de 8 / 16 GB La mayor capacidad del mundo Pretec Electronics Corp., empresa representada en España por Ibérica de Componentes, S.A., anuncia su tarjeta PC ATA Flash de 8 / 16 GB tipo II (5.0 mm) de elevado rendimiento, que establece un nuevo récord para este tipo de dispositivos. Entre las múltiples aplicaciones de la nueva tarjeta PC ATA 26 Flash, destacan instrumentos, servidores de red, sistemas de información y cámaras digitales de alta resolución, que necesitan gran capacidad de almacenamiento para cumplir los requerimientos de elevada rapidez en el proceso de datos. La tarjeta PC ATA Flash de 8 / 16 GB de la serie Cheetah es totalmente compatible con ATA / True IDE y opera en plataformas de 5 y 3.3 V. Con velocidades de lectura de 13 Mbps y de escritura de 12 Mbps, la nueva tarjeta se convierte en dispositivo PC Flash más rápido del mercado. El rango de capacidades de 16 MB a 16 GB hace que la introducción de la tarjeta PC ATA Flash de 8 / 16 GB sea la mejor respuesta a la creciente necesidad de un almacenamiento de datos de mayor densidad y elevada velocidad en productos y sistemas leading-edge. Pretec también ha anunciado la tarjeta CF de 12 GB, que aumenta su capacidad un 300 por ciento con respecto a cualquier producto del mercado. elektor cias noticias noticias noticias noticias noticias noti Tarjeta SD 45X de 1 GB La aparición de cámaras digitales de alta resolución y el creciente número de dispositivos multimedia han provocado que las tarjetas de memoria deban tener una capacidad mucho mayor. Transcend Information Inc., empresa representada en España por Ibérica de Componentes, S.A., anuncia el aumento de la capacidad de sus tarjetas Secure Digital (SD) 45X hasta 1 GB, lo que supone la mayor capacidad de cualquier tarjeta SD del mundo. Con esta tarjeta SD de elevada capacidad, se puede almacenar más de trece mil fotografías JPEG con resolu- ciones de 640 x 480 píxeles. También se pueden registrar seis horas de vídeo MPEG 4 en esta tarjeta SD con el tamaño de un sello. A diferencia de otros fabricantes, Transcend insiste en usar sólo chip Flash NAND SLC (SingleLevel-Cell) que tienen una superior velocidad de escritura, menor consumo de potencia y mayor duración en comparación con tarjetas Secure Digital realizadas con chip MLC (Multi-Level-Cell). Además, esta tarjeta SD 45X Ultra Performance puede alcanzar una velocidad de lectura de de hasta 7.7 MBps y una velocidad de escritura de hasta 6.8 Mbps. Por lo tanto, se convierte en la mejor elección para cámaras digitales y otros dispositivos handheld. Para más información: Ibérica de Componentes, S.A. Tel: 916587320 Fax: 916531019 www.ibercom.net E-mail: [email protected] Más capacidad para cámaras digitales. Nuevas memorias Flash NAND de 1 GB y 512 MB La disponibilidad de estos dispositivos de elevada densidad ofrece soluciones de almacenamiento de datos para drives Flash USB, productos digitales, reproductores MP3, cámaras y teléfonos celulares de tercera generación STMicroelectronics anuncia la disponibilidad de sus productos de memoria Flash NAND de 1 GB y 512 MB, que son los primeros dispositivos del catálogo de Flash NAND de la compañía. Las NAND1G y el NAND512 se presentan en versiones de 1.8 y 3 V. Las aplicaciones de las memorias Flash NAND son fundamentalmente los Sistemas Multimedia en los que se espera un gran crecimiento para 2004. Las memorias Flash NAND cumplen las necesidades de productos de pequeño tamaño, de elevada densidad, que requieren grandes cantidades de memoria de almacenamiento de datos, tales como dispositivos de almacenamiento masivo para cámaras digitales, reproductores MP3, PDA y teléfonos elektor celulares de tercera generación (3G). Los productos NAND1G y NAND512 ofrecen un rendimiento de datos muy elevado, un factor esencial en aplicaciones de almacenamiento masivo, junto con elevada densidad, rapidez de escritura y bajo consumo, características demandadas por los equipos portátiles. Las nuevas memorias se encuentran disponibles en dos versiones para fuentes de alimentación de 3.0 (NAND01G W3A, NAND512W3A) y 1.8 V (NAND01GR3A, NAND512R3A). Las memorias NAND512 y NAND1G están organizadas en un total de 32 páginas por 4096 y 8192 bloques nominales, respectivamente, que se puede leer y programar como un todo; el tiempo de borrado de un bloque es de 2 ms. El tamaño de la página es de 528 Bytes (512 + 16 libres) o 264 palabras (256 + 8 libres), dependiendo de si el dispositivo tiene un ancho de bus x8 o x16. Cada bloque está especificado para 100.000 ciclos de programa y borrado y retención de datos de diez años. Las líneas de dirección y las señales de entrada / salida de datos son multiplexadas en un bus de 8 bit, reduciendo la cantidad de pines y permitiendo el uso de un patillaje de salida modular que hace posible actualizaciones de sistema para dispositivos de mayor densidad sin cambiar el footprint. Cada dispositivo tiene un Programa Caché que mejora el rendimiento de ficheros grandes. Este programa carga los datos en una memoria caché, mientras que los datos previos se transfieren al buffer de página y se programan en el array de memoria. Para más información: STMicroelectronics Iberia, S.A. Juan Esplandiú, 11, 7ºB 28007 Madrid Tel: 914051615 Fax: 914031134 Web: www.st.com 27 ias noticias noticias noticias noticias noticias noti Adaptador USB 2.0 WiFi de 54 Mbps para red inalámbrica Corega International S.A., anuncia el adaptador USB 2.0 WiFi 802.11g WLUSB2GT, que permite conectar ordenadores e impresoras sin cables y transmitir datos de manera segura, usando el estándar de encriptación y seguridad WEP64 y WEP128. Esta tarjeta USB con utilidad de software para red inalámbrica, compatible con otros equipos IEEE 802.11g y WiFi, ofrece servicio técnico gratuito 24 horas multilingüe, a través de la Web, con una base de datos P+F (Preguntas más Frecuentes) muy fácil de usar, que responde directamente todo tipo de preguntas. El adaptador, que posee dos años de garantía, tiene una cobertura en interiores de entre 35 y 100 metros, mientras que en exteriores también puede llegar a los 100 metros, dependiendo del entorno. Otras características son rango de frecuencias de 2,412 a 2,4835 GHz (Banda industrialcientífica-médica), indicadores LED (conexión y potencia) temperatura operativa de 0 a +40 °C (almacenamiento entre -20 y +60 °C), consumo de 5 VDC – USB, MTBF de 100.000 horas estimadas y certificación CE Class B. Acerca de Corega (www.corega-international.com – Tel: 915 591 055 Ext: 102) Corega International S.A. es una filial de Corega Holdings KK (Japón). Con su sede central en Chiasso (Suiza), la empresa se constituyó en febrero de 2002 con el objetivo de ofrecer al mercado de consumo una gama de productos para redes de valor añadido a través de los canales de venta por catálogo, Internet, minorista y distribuidores. KONTRON presenta la primera tarjeta CPU de su línea CompactPCI 3U Informática embebida high-end sin ventilador al mejor precio KONTRON Modular Computers ha introducido la tarjeta CPU CompactPCI CP303V (Value Line), que se basa en los procesadores Celeron Ultra Low Voltage / Low Voltage (ULV / UL). Esta nueva tarjeta suplementa el módulo CP303 más complejo que alberga procesadores Intel Pentium III M. Con un rendimiento escalable de 400 MHz a 1GHz, la CP303-V ofrece una alternativa atractiva a las tarjetas basadas en Pentium III M de superiores prestaciones, ampliando la familia de productos CP303 para incluir mercados lower-end. La CP303-V contiene un interface Ethernet menos, sin embargo, los paneles frontal y trasero disponen de este interface Ethernet para comunicaciones de red. La memoria se ha reducido a 256 kByte, que es más que suficiente para muchas aplicaciones embebidas. Aunque las características son casi idénticas a las del CP303, incluyendo el nivel de soporte gráfico, el CP303-V es más atractivo para aplicaciones sensibles a los costes, ya que su precio es un tercio menor. A pesar de un ancho mínimo 28 Informática embebida high-end al mejor precio. de 4HP, la tecnología de bajo voltaje permite al CP303-V trabajar con un solo heatsink pasivo. La versión de ultrabajo voltaje consume un máximo de 10 W a 400 MHz, haciendo posible que todo el sistema opere sin ventilación activa. Los procesadores son soldados directamente en la tarjeta y una memoria de hasta 512 MByte se acomoda vía un socket SODIMM de 144 pines. La conectividad versátil se mantiene con la inclusión de una tarjeta CompactFlash Tipo II opcional y módulos de transición I/O para el cableado de la parte trasera. Las áreas de uso del CP303V incluyen aplicaciones industriales, tales como control de actividad de producción, fabricación de máquinas y equipos, así como ordenadores de comunicación en sistemas de información de pasajeros. La CP303-V está recomendado para su disposición en el encapsulado CP-Pocket de Kontron para sistemas CompactPCI, ya que supone una alternativa a los ordenadores elektor cias noticias noticias noticias noticias noticias noti DIN rail compactos en aquellos segmentos de mercado donde existe gran competitividad en el precio. Además, las tarjetas intercambiables desde el panel frontal, algo muy apreciadas por los integradores y personal de servicio en un sistema CompactPCI, ofreciendo mayor sofisticación y flexibilidad a precios comparables. El nuevo CP303-V es totalmente compatible en software con el CP303. Si una aplicación requiere superiores prestaciones de proceso en el futuro, el diseño 4HP permite una fácil actualización a las tarjetas CP303 y CP306 basadas en Pentium M. Driver LED RGB de tres canales con control de color El MBI1009 está especialmente indicado para aplicaciones con fuentes de luz RGB-mixed Macroblock, empresa representada en España por Lober, S.A., anuncia el lanzamiento de un nuevo driver LCD RGB de tres canales con color controlable. El MBI1009 no sólo ofrece a los diseñadores tres canales de salida de corriente constante para dirigir LEDs RGB, sino que también puede implementar diferentes corrientes para ajustar la corriente de salida en cualquier momento. Los LEDs RGB, por lo tanto, pueden variar entre 250 colores. El nuevo driver dota de un amplio control de color e intensidad a dispositivos electrónicos portátiles, tales como PDA, MP3, teléfonos móviles o paneles frontales de PC. Con el MBI1009, los diseñadores de sistemas pueden controlar las variaciones de color para cumplir los requerimientos de cada aplicación. Por ejemplo, los colores de la iluminación de cualquier dispositivo electrónico pueden cambiar siguiendo a una melodía musical, los elementos de un panel pueden variar su color según vibraciones mecánicas, o los jugadores pueden disfrutar de feedback de iluminación en sus juegos. Para más información: Lober, S.A. Tel: 913589875 Fax: 913589710 Nueva gama NV-Power de fuentes de alimentación AC / DC Una fuente de alimentación sin compromisos es el sueño de todo diseñador. Con la nueva gama NV-Power, LAMBDA ha convertido este sueño en realidad. Eliminando las barreras, las fuentes de alimentación AC / DC de elevada densidad NVPower ofrecen a los diseñadores una solución sin problemas eléctricos. La gama NV-Power se basa en un transformador plano configurable y emplea tecnología Multiple Efficiency Gain (MEG) para lograr su eficiencia insuperable en PSU de salida múltiple. LAMBDA utiliza rectificadores síncronos en una topología multi-resonante (MRT), la cual es el elektor núcleo del nuevo diseño y mejora en un 5% la eficiencia respecto a métodos tradicionales. Los productos AC / DC suelen usar post-reguladores ‘Megamp’ y conversión en dos fases. Sin embargo, la nueva topología MRT emplea control de bucle cerrado de las salidas principales, conversión monofase y canales auxiliares que utilizan postregulación DC / DC de alta eficacia. Cada una de las salidas está totalmente aislada y no existen requerimientos de carga mínima en los canales de salida. La nueva topología permite el uso de inductores y componentes más pequeños. Las Diagrama de conexión. Para más información: KONTRON Embedded Computers, AG. Gobelas, 21 28023 Madrid Tel: 917102020 Fax: 917102152 ias noticias noticias noticias noticias noticias noti mejoras en condensadores cerámicos multicapa y condenadores funcionales de polímero orgánico hacen posible la implementación de circuitos de filtro sin inductor mucho más sencillos, que disminuyen las pérdidas, incrementan la eficiencia y reducen el tamaño. Además, la utilización de diodos Schottky de carburo de silicio en el circuito PFC ofrece otra mejora de eficiencia del 4%, así como una reducción de emisiones EMI. La gama NV-Power emplea un microcontrolador de 8 bit para gestionar rutinas internas, reemplazando a comparadores, amplificadores operativos y otros componentes discretos usados en diseños menos integrados. Esto logra una reducción de componentes del 50%, que permite un 40% más de espacio para componentes de potencia. La construcción abierta de las nuevas fuentes de alimentación facilita su ventilación, junto con los beneficios combinados del diseño MRT y MEG, que reduce un 50% la generación de calor y elimina la necesidad de heatsinks. Las fuentes de alimentación son productos que no dañan el medio ambiente, ya que superan las directrices ‘Energy Star’ para lograr baja dispersión de potencia en modo operativo, mejorando en un 50% los resultados de otros productos del mercado. Estos nuevos modelos han sido diseñados como una solución libre de carga y cumplen la directiva RoHS. Para más información: LAMBDA, S.A.S. E-mail: [email protected] Fuentes de alimentación sin compromisos. Microswitches desde 0,1 hasta 5 A ZIPPY Technology, empresa representada en España por Master Coelectrónic, S.L., anuncia sus series VMN/VMO-P1, VMN/VMO03, VMN/VMO-06, VMN/ VMO-10 y VMN/VMO-15 de microswitches miniatura, que destacan por un mecanismo elástico que prolonga la vida operativa de los dispositivos, activador con bisagra y diseño en función de las necesidades del cliente. Las nuevas series, gracias a sus múltiples ventajas, están muy indicadas para gran variedad de aplicaciones, incluyendo joystick, videojuegos, registradores de tiempo, aire acondicionado, procesadores de comida, exprimidores, alarmas, mezcladores, máquinas trituradoras de papel y otros muchos dispositivos y electrodomésticos. 30 Las principales características de estas series de microswitches son: frecuencia mecánica y eléctrica de 300 y 10- 30 operaciones por minuto, respectivamente, resistencia de contacto inicial de 30 mW como máximo, resisten- cia de aislamiento (a 500 VDC) de 100 MW como mínimo, y potencia dieléctrica de AC1000 VRMS (50-60 elektor cias noticias noticias noticias noticias noticias noti Hz); todo ello con unas diminutas dimensiones. La temperatura de almacenamiento se sitúa de -25 a +85 °C, con una humedad relativa del 85%, logrando una vida de servicio de diez millones de operaciones me- cánicas y entre 6.000 y 100.000 operaciones eléctricas, dependiendo del tipo de microswitch. Para más información: Master Coelectrónic, S.L. email: [email protected] web: www.mastercoelectronic.com Tel: 902420052 próximo número próximo número próximo número próximo mes en elektor Mini servidor Web para Internet e Intranet Un nuevo desarrollo que añade una interface para nuestro increiblemente popular microcontrolador MSC1210 (también conocido como ‘Central de Medida de Precisión’) que proporciona conectividad de red e Internet, permitiendo al procesador publicar sus propias páginas web. Como ejemplo práctico, el artículo describe una mayor temperatura permitiendo al usuario entrar, a través de Internet, límites de temperatura y una alarma de dirección e-mail cuando se envía un mensaje predefinido. Por otro lado, el mini servidor web hace posible que los puertos de red puedan conmutarse o interrogarse, todo desde un PC conectado a internet, literalmente en cualquier parte del globo. No se pierda los mejores artículos de este año. Reserve su copia AHORA. Circuitos de verano 2004 En este número encontrará más de 50 circuitos pequeños, diseño de ideas, presentación de IC, notas de aplicación, trucos de hardware y software Otros artículos de tamaño regular Además de la colección de pequeños circuitos y nuestro proyecto puntero ‘mini servidor web’, tenemos los siguientes artículos completos: – Trabajando con Active X – Medida y control a través de Internet Harry Baggen ESTO ES CLASE... amplificadores de audio, de la A a la T El amplificador final es la fuente de potencia de toda instalación de audio. Su trabajo consiste en convertir una pequeña señal alterna en una señal potente, adecuada para poder trabajar con unos altavoces, con una distorsión lo más pequeña posible. A lo largo de los años, desde la invención de los sistemas de audio electrónicos, los diseñadores se han enfrentado a este problema aportando diferentes soluciones. Todo empezó con los amplificadores de Clase A... Un poco más de ruido, una gran cantidad de potencia adicional Para mucha gente, la cantidad de potencia que un amplificador puede producir es un factor importante a la hora de juzgar sus características (¡Ah!, ¿su amplificador le proporciona 2 x 40 vatios?, ¡el mío da 2 x 70!). Pero en la práctica, la potencia sólo juega un papel de menor importancia. Podemos generar una gran cantidad de ruido con tan sólo aumentar un poquito la potencia. Si utilizamos un conjunto de altavoces que puede proporcionar un nivel de presión de sonido de 86 dB con 1 vatio (lo cual es un valor que establecen frecuentemente los fabricantes en las especificaciones de los altavoces), este mismo sistema podría trabajar con 90 dB con tan sólo 2,5 vatios. Con 25 vatios tendremos potencia suficiente para alcanzar los 100 dB. Esto ya es una potencia bastante más sería (y también más perjudicial para nuestros oídos). Nuestros oídos perciben cada incremento de 6 dB en el nivel de presión de sonido como si se hubiese doblado el nivel de volumen de dicho sonido, pero esto requiere a su vez un incremento de la potencia en un factor de 4. Esto significa que si realmente queremos disponer de un amplificador final más grande, con más potencia de la que actualmente tiene, necesitaremos un amplificador que sea capaz de proporcionar, como mínimo, cuatro veces la potencia actual, para que notemos una diferencia apreciable. Generar una gran cantidad de potencia no es una tarea sencilla para un amplificador. Para proporcionar suficiente potencia a los altavoces conectados al amplificador es necesario realizar una amplificación de tensión y una amplificación de corriente. Esto se debe a que los altavoces tienen una eficiencia de un porcentaje bastante reducido, lo que significa que necesitaremos generar una cantidad de vatios relativamente grande, si queremos obtener un nivel de presión de sonido adecuado en nuestro salón. En el caso de la realización de conciertos y eventos al aire libre, se requiere bastante más presión de sonido, lo que equivale a que la potencia necesaria pueda alcanzar fácilmente la cantidad de varios kilovatios. Para producir una amplificación de potencia en un amplificador final se han desarrollado varios conceptos en los que se utilizan transistores normales bipolares o transistores FETs para generar señal de salida de alta calidad y/o mejorar la eficiencia de la etapa de salida. (en este caso dejamos a un lado los amplificadores a válvulas). Cuando diseñamos una etapa de salida el diseñador debe tener en cuenta, muy cla- ramente, las propiedades específicas de los componentes semiconductores que van a usarse. Si tuviésemos que trabajar con transistores bipolares o FETs "ideales" sería mucho más fácil llegar a construir buenos amplificadores. Por desgracia, todos los componentes semiconductores adolecen de una no linealidad en sus características de amplificación, lo que produce a su vez problemas mayores, especialmente cuando se trata del procesamiento de señales analógicas. Este problema se puede minimizar utilizando lazos de realimentación dimensionados adecuadamente. También se producen otros efectos desagradables que dependen de la configuración seleccionada, como puede ser el problema de la distorsión de cruce. Especialmente con los grandes amplificadores, la generación de calor es otro factor que debe tenerse muy en cuenta. Esto nos puede llevar a efectos a térmicos de gran alcance, tales como descontrol de la configuración de la corriente de reposo y la distorsión térmica de modulación. Los amplificadores finales están clasificados normalmente de acuerdo a la configuración de su etapa de salida. Esta configuración determina en gran medida su eficiencia y su calidad, y la etapa de salida es donde tiene lugar la verdadera amplificación de potencia. Las distintas configuraciones de amplificadores que pueden diseñarse utilizan letras del alfabeto, aunque dichas letras no dicen nada sobre cómo trabajan dichos amplificadores. Así, todo empieza con la primera letra del alfabeto. 33 Figura 1. Un amplificador de Clase A tiene muy baja eficiencia, pero está totalmente libre de distorsión de cruce. Clase A +UB Vamos a comenzar con la configuración más sencilla, el amplificador final de Clase A, el cual es una de las mejores configuraciones que podemos utilizar para reproducción de audio de alta calidad. En su forma más básica, esta configuración puede implementarse utilizando un seguidor de emisor estándar (ver Figura 1). La corriente de reposo a través del transistor es igual a la corriente de salida de pico en alterna (AC), lo que significa que el transistor está alimentado a la mitad de su rango de trabajo y sencillamente conduce más o menos corriente en función de una corriente alterna de control. La eficiencia de este amplificador es bastante baja: de un 25% con una amplitud de salida máxima, e incluso menos con niveles bajos de señal. Podemos mejorar la eficiencia utilizando un diseño con alimentación simétrica que utilice dos transistores. Pero incluso en este caso, la eficiencia más alta que se puede alcanzar es tan sólo del 50 %. +UB RL 0 040102 - 11 Figura 2. En una configuración en Clase B cada transistor conduce durante la mitad de un ciclo de la onda senoidal. En este modelo de amplificador el problema aparece en las cercanías del punto de paso por cero. +UB +UB +UB Clase B RL -UB -UB 040102 - 12 -UB Figura 3. Los amplificadores en Clase G utilizan una fuente de alimentación enganchada cuya tensión se ajusta continuamente para adaptarse a la amplitud de la señal. +UB var Detección de Señal Fuente de Alimentación Enganchada RL -UB var 040102 - 13 Figura 4. Los amplificadores en Clase H se limitan ellos mismos a conmutar entre varias fuentes de tensión diferentes (en este caso dos). UB2 UB1 RL Electrónica de control UB1 UB2 040102 - 14 34 La configuración de un amplificador en Clase B utiliza dos transistores, cada uno de los cuales conduce durante exactamente la mitad de un ciclo de la señal de entrada (ver Figura 2). En el estado de reposo, no circula ninguna corriente a través de los transistores. La eficiencia de una etapa de salida en Clase B esta próxima al 78%, pero la principal desventaja de esta configuración es la "distorsión de transferencia" que se produce cada vez que la carga debe transferir señal de un transistor al otro. Esto nos lleva al problema de la distorsión de cruce, el cual produce una degradación bastante audible de la forma de onda de la señal. Para solucionar este problema, los amplificadores en Clase A y los de Clase B se pueden combinar para producir amplificadores en Clase AB. Esta nueva configuración equivale a una configuración en Clase B en la que se permite que circule una pequeña corriente de reposo a través de los transistores, lo que provoca que la etapa de salida se comporte como si trabajase en Clase A con niveles bajos de potencia. Esta aproximación se utiliza actualmente de varias formas en una gran cantidad de amplificadores finales. La eficiencia de esta nueva configuración permanece aproximadamente igual a la de Clase B. Clase G y H ¡Alto, un momento! ¿No nos estamos saltando algunas clases de amplificación? Claro que sí, pero lo hemos hecho a propósito. Las Clases C, E y F también existen, pero actualmente sólo son adecuadas para amplificaciones con alta frecuencia, lo que significa que, más o menos, quedan fuera del objetivo inicial que nos propusimos en este artículo. Por otra parte, los diseños de amplificadores en Clase D son tan diferentes de los amplificadores en Clase A y Clase B que hemos decidido tratarlos de manera separada. Por todo esto, nos van a permitir que echemos en primer lugar una pequeña ojeada a los amplificadores de Clase G y H, los cuales tienen una característica importante en común. Dicha característica es que en ambas clases, la tensión de alimentación se ajusta de acuerdo al tamaño de la señal de salida. En una configuración en Clase G (ver Figura 3), la tensión de alimentación se ajusta de manera continua, para adaptarse a la amplitud deseada de la señal de salida. Este "seguimiento" de la tensión de alimenta- elektor Figura 5. Un amplificador de Clase D está formado por un modulador de ancho de pulso con una etapa de salida de potencia y un filtro paso/bajo. +UB Comparador RL Inversor -UB Generador de Onda Triangular 040102 - 15 ción se puede implementar relativamente fácil utilizando las fuentes de alimentación modernas conmutada aunque, claro está, también es importante disponer de un buen circuito regulador que permita que la tensión de alimentación responda suficientemente rápido a los cambios de la amplitud en la señal generada por la etapa de salida. En una configuración en Clase H (ver Figura 4), lo que sucede es esencialmente lo mismo que en una configuración en Clase G, excepto en el detalle de que la tensión de alimentación se conmuta entre diferentes niveles de tensión distintos (normalmente dos) en lugar de realizar una variación continua. Esto permite que la disipación de la etapa de salida se pueda reducir de manera considerable, especialmente cuando estamos trabajando con grandes cantidades de potencias de salida. Clase D Con una configuración de amplificador en Clase D, la letra “D”no tienen nada que ver con algo como "digital" (esto es tan sólo una coincidencia). Este tipo de amplificador hace referencia a un amplificador de conmutación que utiliza modulación de ancho de pulsos (ver Figura 5). La señal de entrada se compara con una forma de onda triangular y la señal proveniente del comparador conmuta la etapa de salida para trabajar con una tensión de alimentación positiva o negativa. Entrada de Datos Numérica Esto se hace utilizando frecuencias de conmutación de valores muy elevadas, normalmente 10 veces, como mínimo, más altas que el ancho de banda de audio (lo que significa un valor de 200 kHz o superior). Con esta forma de modulación, el ancho de pulsos depende del nivel de la señal de entrada. Si colocamos un filtro paso/bajo después de la etapa de salida, la señal de ancho de pulsos es integrada y lo que queda es una señal analógica con la misma forma que la señal de entrada pero, por supuesto, amplificada. Como la etapa de salida sólo tiene que conmutar, su eficiencia es muy elevada. Sin embargo, también existe un cierto número de desventajas en este comportamiento. Es bastante más difícil conseguir que la forma de onda de la señal esté libre de distorsión, por lo que se requiere un filtro de salida robusto y se tienen que tomar medidas más drásticas para limitar la radiación de interferencias. Para una amplificación con baja distorsión siempre es necesario utilizar un lazo de realimentación negativa (analógico o digital). Clases S y T Aunque el principio de funcionamiento de un amplificador en Clase D tiene ya una antigüedad de varias décadas, nunca llegó a ser considerada una aplicación de alta fidelidad verdadera- Generación de Reloj Maestro Recuperación del Ciclo de Muestreo Figura 6. Diagrama de bloques de un amplificador Master-S de la casa Sony. Control de Altura de Pulso Pulso de Audio de salida Conversión a Alta Velocidad de Muestreo Borrado del Ciclo de Datos Conversión de Datos a PLM Generación de Pulso de Audio de Alta Precisión Controlador de Pulso de Alta Potencia S-TACT Control de Altura de Pulso 040102 - 16 elektor 35 Figura 7. El amplificador Clase T de tres caminos es una elaboración “inteligente” del principio de funcionamiento del amplificador en Clase D. En este amplificador, un procesador monitoriza constantemente la señal de entrada y ajusta las señales de conmutación. Procesador de Acondicionamiento Adaptativo de la Señal Procesamiento Predictivo Entrada del Amplificador Control de Silencio Detección de Sobrecarga Detección de Fallo Conversión Digital Generación de Tensión 040102 - 17 mente establecida. Esto se debió principalmente a la distorsión excesiva y a las fugas de los componentes semiconductores buenos (transistores FETs de potencia rápidos). Mientras tanto, distintos fabricantes han desarrollado variantes de este tema y, en muchos casos, les han dado su propia designación. Así, por ejemplo, la casa Crown llegó a desarrollar su amplificador en Clase I; mientras que la casa Sony desarrollo su tecnología SMaster; y la casa Tripath diseñó su amplificador en clase T. Por desgracia, la graciosa secuencia alfanumérica ha sido abandonada en favor de las distintas designacioones generadas por los fabricantes específicos. En su tecnología S-Master, la casa Sony combinó distintas técnicas para conseguir obtener una configuración de amplificador en Clase D adecuado para aplicaciones de alta fidelidad doméstica. En este caso, el proceso de convertir la señal entrante en su correspondiente señal de ancho de pulso, se denomina "modulación por longitud de pulso complementario” (C-PLM, del inglés “complementary pulse length modulation”). Se puso una atención especial en la supresión de pequeños picos esporádicos. Esto se consiguió utilizando una señal de reloj extremadamente precisa y un circuito denominado “clean data cycle” (es decir, “borrado del ciclo de dato”), que corrige el posicionamiento de los pulsos de salida si fuese necesario (ver Figura 6). El método utilizado para implementar el control de volumen es verdaderamente una característica poco habitual del comportamiento de la casa Sony. En un diseño de amplificador normal en Clase D, la forma de onda de pulso completo esta siempre presente en la salida, con una amplitud comprendida entre 50 y 100 V pico a pico. Con señales de salida muy pequeñas en particular, es muy difícil eliminar completamente todas las componentes residuales de la forma de onda de pulso proveniente de la señal filtrada. En el diseño de la casa Sony, el volumen se regula a través del ajuste de la tensión de alimentación para la etapa de salida. Esto evita que cualquier información pueda llegar a perderse con niveles de señal bajos. Esta técnica tiene un rango efectivo de 50 dBs. Otra compañía diferente, Tripath, ha desarrollado una técnica que, de acuerdo con ellos, combina la calidad de una señal de un amplificador en Clase A con la eficiencia de los amplificadores en Clase AB (en torno al 80 ó 90%). Esto se hace utilizando una combinación de una circuitería analógica y digital, junto con algoritmos digitales que modulan la señal de entrada utilizando formas de onda de conmutación de alta frecuencia. Los algoritmos desarrollados por la casa Tripath han derivado de algoritmos adaptativos y predictivos ya utilizados en sistemas de tele- 36 Salida de Potencia y Lógica de Cualificación comunicación. Con el amplificador de la casa Tripath, la mayor parte de los circuitos analógicos y digitales están alojados en un único circuito integrado, el cual también puede incluir los transistores de salida (dependiendo de la potencia). El diagrama de bloques de este amplificador se muestra en la Figura 7. La señal de salida se almacena en primer lugar por medio de una etapa de entrada. A partir de aquí la señal pasa a un bloque de Procesamiento Digital de Potencia que contiene el procesador de señal, una función de conversión digital, una conmutación de silencio (“mute”), una protección de sobrecarga y una detección de error. La etapa de salida se controla por medio de una línea lógica de cualificación y los altavoces se conectan a un filtro colocado a continuación de la etapa de salida. Gracias a sus algoritmos especiales, el procesador de un amplificador en Clase T está adaptado de manera continua a la magnitud de la señal de entrada. Con niveles bajos de entrada, la frecuencia de conmutación es bastante elevada (alrededor de 1,2 MHz). Esto tiene un efecto beneficioso en la calidad de la señal. La frecuencia de conmutación cae de manera gradual a medida que se incrementa el nivel de entrada, de manera que se puede incrementar su eficiencia. La frecuencia de conmutación última alcanza su valor más bajo (alrededor de 200 kHz) cuando la salida está controlada por una amplitud máxima. A pesar de esto, un tipo de forma de ruido se aplica al pico de la señal de salida para mejorar la forma de onda de la señal. Como resultado de todas estas medidas, el amplificador en Clase T puede proporcionar una impresión de sonido que recordarán los oyentes aficionados a los amplificadores analógicos de audio. El futuro El constante avance del audio digital ha hecho posible que podamos encontrar últimamente alguna etapa de salida de forma digital en muchos amplificadores de gran consumo. Esto es debido a que disponen de una eficiencia más elevada, un tamaño más reducido y un coste de fabricación mucho más bajo. Es difícil estimar si estos desarrollos también llegarán a prevalecer en el reino de la alta calidad. Por ahora, tan sólo están presentes en el mercado una pequeña cantidad de amplificadores digitales de alta fidelidad. Pero si queremos intentarlo por nosotros mismos, podemos comenzar montando el amplificador Clarity que se describe en uno de los artículos de este número. (040102-1) elektor 1-633020 os circuitos impresos circuitos impresos circuitos impre Multi Programador 020336-1 (components side) ROTKELE )C( Multi Programador 020336-1 (solder side) 1-304030 Router de vías 030403-1 ROTKELE )C( 1-902030 Operador Silencioso 030209-1 elektor Todos los circuitos están a tamaño real (100%) excepto indicación en contra. 37 Amplificador Clase-T Ton Giesberts Este amplificador de gama alta suministra una alta potencia, lo que no significa un diseño grande y complicado. Este amplificador es muy eficiente (y compacto), y sus características técnicas superan fácilmente a varios diseños convencionales. ClariTy 2x300W Si tenemos la idea de que el amplificador completamente ensamblado sea tan ligero como una pluma, quizás debamos reconsiderar un poco nuestra decisión. Después de todo, 2 x 300 W de potencia real requieren una fuente de alimentación importante. Pero, éste es el único aspecto del amplificador que es comparable a otros tipos de amplificadores. Gracias al uso inteligente de la modulación por anchura de pulso, este amplificador es tan eficiente que podemos usar un disipador con unas dimensiones modestas, lo que significa que la caja puede ser relativamente pequeña. Es más, este amplificador no es un amplificador de anchura de pulso ordinario. Este diseño, que está bajado en el excitador de audio digital Tripath TA3020 Class-T, tiene unas excelentes especificaciones y entidad por sí mismo, frente a otros amplificadores de gama alta. Si desea más información sobre modulación de anchura de pulso en amplificadores finales de audio, deberá leer el artículo ‘Eso es clase...’. El diseño está basado en un ejemplo de aplicación estándar y la referencia de PCB del fabricante. Esto es así porque la placa total determina la calidad de todo el amplificador. Junto a esto, la naturaleza de este diseño (con altas frecuencias de conmutación y grandes corrientes) impone requisitos severos en varios de los componentes. Eso significa que en muchos sitios se utilizan elektor tipos especiales de condensadores electrolíticos y condensadores de desacoplo. Incluso para el acoplamiento térmico entre los transistores de salida y el disipador, los aislantes de mica o Kapton no son suficientes. En su lugar, usaremos aislantes cerámicos con una fina capa de varios milímetros. El integrado también necesita dos tensiones de alimentación auxiliares, para lo cual se ha desarrollado una placa de circuito impreso separada. Esta placa también incluye un retardo de encendido de tensión de red para el transformador principal y dos fusibles para las tensiones de alimentación de red. Para suprimir las interferencias electromagnéticas (EMC), se necesitan filtros extra que se incluyen en las entradas y salidas. Esto debería darnos una idea de lo que esperamos, pero en la primera parte de este artículo nos concentraremos en cómo trabaja el integrado Tripath. En la Figura 1 podemos ver claramente que el integrado consta esencialmente de tres secciones para cada canal: una etapa de entrada analógica (amplificador inversor), una unidad de modulación y procesamiento, y unas etapas de excitación para los MOSFETs de potencia. El integrado también proporciona protección contra sobre-corriente, sobre-tensión y bajatensión y una conexión para una señal de silencio externa. Todo esto determina si las salidas del amplificador están activas. Etapa de entrada La etapa de entrada analógica está implementada como un amplificador inversor para un dimensionado conveniente de la ganancia y ancho de banda. De acuerdo a las especificaciones de los integrados, el nivel de señal máximo permitido para excitar completamente el modulador es de 4 V pp. Con el dimensionado que usamos aquí, asumimos una sensibilidad de entrada de 1,13 V eff para una amplitud de salida máxima; la salida de la etapa de entrada puede entregar 3,2 Vpp. La relacion entre R3 y R2 (R24 y R23 para el segundo canal) determina la ganancia de la etapa de entrada, aquí la relación es 1, tal y como podemos ver en el esquema de la Figura 2. El condensador C2 (C15) incrementa la estabilidad del amplificador de entrada y suprime el ruido de RF para limitar el ancho de banda a aproximadamente 240 KHz. C1 (C14) fija la esquina de la frecuencia inferior, la cual está alrededor de 2,5 Hz. La ganancia para frecuencias de la banda de audio debe ser tan plana como sea posible. C1 y C14 son condensadores MKT estándar, porque, como principio intentaremos evitar el uso de condensadores electrolíticos en el camino de la señal. R4, R5 y P1, junto con el condensador de desacoplo C3 (R25, R26, P2 y C16), permite ajustar al mínimo la tensión de offset (desplazamiento). 39 TA3020 43 OCS1HP 44 OCS1HN OA OUT1 26 40 V BOOT1 V5 INV 1 25 - 45 HO1 + 46 HO1COM A GND Modulador V N10 Procesado y Modulación 48 LO1 47 LO1COM 42 OCS1LP 2.5V 41 OCS1LN 37 OCR1 33 OCR1 200K Ω BIASCA P 19 V5 MUTE 13 FBKOUT1 14 FBKGND1 24 15 HMUTE REF1 OA OUT2 32 8 OCS2HP 21 V5 INV 2 20 9 OCS2HN - 10 V BOOT2 + 5 HO2 A GND 4 HO2COM V N10 Procesado y Modulación BBM0 22 BBM1 23 DCOMP 17 V5 27 A GND 28 V5 35 A GND 34 V NNSENS 30 VPPSENS 2 LO2 3 LO2COM 7 OCS2LP 6 OCS2LN 12 OCR2 31 OCR2 V5 A GND 16 FBKOUT2 18 FBKGND2 V5 A GND V N10 1 V N10 V NNSENSE 29 VPPSENSE V NN 39 V NN 38 NC NC 11 NC 36 NC 030217 - 12 Figura 1. La estructura interna del Tripath TA3020. 40 El amplificador aumenta la señal de la etapa de entrada al nivel de salida. Es la segunda parte de la amplificación total, o mejor dicho, la etapa de ganancia real. El procesador proporciona una forma de onda conmutada que depende del nivel y frecuencia de la señal. Sin señal de entrada, el valor medio de la frecuencia de conmutación es aproximadamente de 700 KHz. Puede variar entre un rango máximo de 200 KHz a 1,5 MHz. Dos etapas de MOSFET complementarios convierten la señal al nivel adecuado para excitar las puertas de los MOSFETs. La tensión de alimentación de los drivers (10 V) se suministra a través del pin VN10. Primero se desacopla todo lo posible por medio de C38 y C39. Esos condensadores deben, por lo tanto, colocarse tan cerca como sea posible del pin asociado del circuito integrado. En el lado negativo, LO1COM (conectado a la fuente de T2) y VN10 proporciona las conexiones de alimentación para el driver. En el lado positivo, el condensador elevador C7 (C20) se carga a través de D5 (D12) a casi 10 V cuando la salida es negativa, y alcanza el máximo de tensión de salida cuando T1 comienza a conducir. Esta tensión es entregada a VBOOT, la cual junto con HO1COM (la fuente de T1 es también el puente de salida) forma la otra conexión de alimentación para este driver. Al nivel de recorte, C8 (C21) proporciona un buffer extra, porque la frecuencia de conmutación es más baja al nivel de recorte. R13 (R14) limita la corriente de carga de C8 (C21) cuando el amplificador está encendido. MOSFETs Dos MOSFETs de canal n (T1 & T2 o T3 & T4) forman un circuito de medio puente para cada canal. La elektor salida de las etapas complementarias excita de forma alternativa cada uno de los MOSFETs en conducción. Se mantiene un ‘tiempo muerto’ para asegurar que los dos MOSFETs nunca pueden conducir al mismo tiempo (sin que haya corrientes residuales). Esta vez puede establecerse usando dos jumpers (JP1 y JP2). Nosotros recomendamos experimentar con la configuración seleccionada. Es posible reducir el tiempo muerto si escogemos MOSFETs con una capacidad de puerta más pequeña (menor potencia de amplificación), pero mejor no hacerlo. Las resistencias de puerta R8 y R9 (R28 y R30) limitan el slew rate, y eso limita la saturación, debido a la conmutación, reduciéndose asimismo la cantidad de potencia que, por otro lado, se debería disipar en los drivers (resistencias de 1 W) para cargar y descargar las capacidades de puerta del MOSFET. D1 y D2 (D8 y D9) reducen el tiempo de descarga de la puerta, disminuyendo el tiempo de caída de los pulsos, y la cadena que tanto T1 como T2 puedan conducir al mismo tiempo. R8 y R10 (R29 y R31) se añaden por razones de seguridad. Si el integrado no está colocado, esto nos asegura que las puertas de los MOSFETs permanecen descargadas. Sin esas resistencias, los picos de corriente y tensiones de ruido podrían ocasionar consecuencias desastrosas. R6 y R11 (R27 y R32) son resistencias de baja inductancia que son necesarias para limitar la corriente, lo cual describiremos más tarde. R12 y C4 (R33 y C7) forman una red amortiguada que elimina los picos de alta frecuencia en la señal de salida. Esta red está colocada tan cerca como es posible de T2 (T4). Los diodos D6 y D7 (D13 y D114) están conectados entre la fuente y el drenador de cada uno de los transistores, para evitar saturaciones. elektor Tales saturaciones se originan principalmente en la bobina del filtro de salida cuando circulan grandes corrientes. Los diodos (en encapsulado SMD) también se colocan tan cerca como sea posible de los terminales asociados, principalmente para proteger el integrado. D3 y D4 (D10 y D11) son diodos adicionales conectados entre las fuentes y drenadores (respectivamente) de los MOSFETs para suprimir saturaciones. Todos esos diodos (D1 – D14) deben ser del tipo recuperación ultra-rápida. C5 y C6 (C18 y C19) desacoplan el circuito de medio puente y están especialmente indicados para suprimir picos en las líneas de tensión de alimentación. Esto también tiene un efecto benéfico en la operación de los MOSFETs. C6 (C19) debe ser un condensador electrolítico con un ESR extremadamente bajo y muy buenas características de HF. Aquí no debemos de usar una alternativa al modelo descrito, a menos que las especificaciones sean igual de buenas o mejores. Un condensador electrolítico normal probablemente explote o tenga una vida muy corta. La señal modulada en anchura de pulso en la salida del medio puente se aplica a los terminales de salida a través del filtro LC L1/C9 (L2/C22). Filtro de salida Gracias a la elevada frecuencia de conmutación, aquí sólo es necesario usar un filtro de segundo orden con una frecuencia de corte relativamente alta (frecuencia de resonancia de 101 kHz). Para mejorar el factor Q del filtro, el cual es primariamente importante si no hay cargas conectadas, se coloca una red Zöbel en la salida, porque por otro lado las corrientes de resonancia y señales de pitidos de la salida podrían reducir la fiabilidad del amplificador. Como la frecuencia de corte del filtro es más alta que la convencional de los amplificadores de Clase D, el sistema de altavoces conectado tiene un efecto considerablemente más pequeño. Debido a las grandes corrientes involucradas aquí, no se puede utilizar en la salida del filtro un choque ordinario de supresión de ruido. Debemos usar un núcleo de material especial para mantener baja la distorsión y alta la eficiencia. A este respecto, profundizaremos en la segunda parte de este artículo, que aparecerá en el mes de Septiembre del 2004. Configuración del amplificador La ganancia del modulador se fija usando una resistencia de realimentación R15 (R36) y un divisor de tensión R18/R20 (R39/R41). Estos componentes deben dimensionarse de acuerdo al valor de la tensión de alimentación usada aquí, lo cual es necesario para que el amplificador sea independiente del comportamiento de la fuente de alimentación (evitando así las fluctuaciones debidas a la amplitud de salida, variación de la tensión de red, etc.). La realimentación inversa adicional para contar ‘salto a masa’ la suministra R16 (R37) y el divisor de tensión R17/R19 ((R38/R40). Estas dos redes deben ser idénticas. Los valores de resistencia pueden calcularse de forma bastante fácil. Un valor de 1 K es el que se usa para R17 y R18, así que el valor de las otras resistencias sólo depende del valor de la tensión de alimentación VPP (asumiendo una fuente de alimentación completamente simétrica) y el valor seleccionado para R17. R19 = R17 ⫻ VPP ⫼ (VPP – 4) 41 VN10 11 NC 26 OAOUT1 OCS1HN 20k0 OCS1HP 25 D1 470k 100n 47μ 250V 160V 5Ω6 470k C3 R8 L1 46 24 VNN OCS1LN VPP R50 OCR1 OCR1 30 29 VNNSENSE FBKOUT1 VPPSENSE FBKGND1 1M2 HMUTE +5V 21 OAOUT2 VBOOT2 R24 33p R23 OCS2HN 20k0 C15 OCS2HP 20 20k0 33 D12 ERROR 10 9 R27 8 0Ω01 T3 HO2 470k R29 28 35 AGND LO2COM V5 OCS2LP 34 D11 5Ω6 220p 17 BBM0 220n 400V C23 100n 400V R37 OCR2 12 K4 15k4 FBKGND2 DCOMP VNN 39 220p LS2– 100n VNN 31 R42 13k0 BBM1 FBKOUT2 R40 VN10 16 VNN R41 18 VN10 C24 270p K6 1 VPP L3 K5 R36 0Ω01 1k07 0 C17 R39 R32 C26 23 R38 C25 OCR2 22 R31 7 6 LS2+ C22 3 AGND BBM0 1 BBM1 1 R35 +5V R30 2 C29 OCS2LN T4 K3 * 11μ3 R33 D9 V5 LO2 100n 240Ω C19 4 470k 27 +5V 47μ 25V L2 C28 +5V C21 100n R34 100n 47μ 250V 160V 5Ω6 D13 100n C18 C20 R28 5 D14 +5V 0 150p VN10 D10 TA3020 HO2COM JP2 C11 2k2 D8 100n JP1 R20 D15 R43 15 C16 10k R19 VN10 14 470k 330k 13k0 13 INV2 R26 P2 LS1– 100n R21 R25 3μ3 R22 220p VNN 470k C14 37 VPP +5V K2 15k4 0Ω01 R52 422k R51 100n 400V R16 1k07 4 220n 400V C10 C12 422k CNY17 392k 2 R15 R11 41 C13 R49 R18 22Ω 5 R17 15k4 6 R12 R10 42 MUTE LS1+ C9 47 1k07 1 R47 K10 LO1COM OCS1LP R45 1k00 IC2 REF 5Ω6 1k00 100k 8k25 32 D4 R9 48 1k5 mute LO1 15Ω R44 R48 1k00 BIASCAP 100n R46 +5V 220p 470k 19 R14 T2 C27 +5V 11μ3 C4 D2 22Ω D6 K1 * 15k4 HO1COM 1k00 100n 1k07 10k C5 240Ω C6 R7 45 D7 P1 47μ 25V 100n R13 T1 D3 470k 330k 0Ω01 IC1 HO1 C8 C7 R6 43 INV1 R4 R5 R1 44 1k00 20k0 3μ3 40 1k00 33p R2 D5 VPP VBOOT1 R3 C2 C1 38 NC 15Ω +5V 36 NC VN10 10μ +5V K7 * ver texto K8 T1 ... T4 = STW38NB20 D1 ... D4, D8 ... D11 = MUR120 D5 ... D7, D12 ... D14 = MURS120T3 K9 030217 - 11 C30 C31 C32 470μ 63V 470μ 63V 100n 100n 250V 250V C34 C35 C36 470μ 63V 470μ 63V 100n 100n 250V 250V C38 C39 47μ 25V 100n C33 C37 VNN VN10 Figura 2. El circuito alrededor del circuito integrado amplificador. 42 elektor Esto supone un valor de resistencia E96 de 1,07 K. Este valor es razonablemente independiente del de la tensión de alimentación. Si usamos una tensión de alimentación máxima de 51 V, sólo se debe incrementar a 1,10 K. Por último, el valor de R15 determina la ganancia del modulador: R15 = R17 ⫻ (VPP ⫼ 4) Nosotros asumimos una tensión de alimentación máxima de 62 V (los condensadores electrolíticos especiales de desacoplo de la placa amplificador son de una tensión de 63 V). Esto nos da un valor de 15,4 K para R15. La ganancia del modulador se puede calcular de la misma manera que para un amplificador estándar no inversor: Amodulator = (R15 ⫼ Rp) + 1 Donde Rp es el equivalente de resistencia en paralelo de R18 y R20. Los condensadores C11 y C24 filtran y retrasan la señal de realimentación del modulador. Tienen valores diferentes y evitan el ruido de RF con muy altas frecuencias desde la red de realimentación penetrante, usando valores diferentes debido a que los moduladores tienen diferentes frecuencias de conmutación. Esto evita interferencias mutuas entre los moduladores. Los valores se eligen para producir una diferencia mayor de 40 KHz. Protección Para proteger el amplificador, el integrado driver monitoriza las tensiones y las corrientes de alimentación a través de los transistores. La entrada VPPSENSE se usa para monitorizar la tensión positiva de alimentación para sobre-tensiones y bajo-tensiones; la elektor entrada VNNSENSE se usa de la misma forma para la tensión negativa. Si la tensión de alimentación está fuera de los límites permitidos, la etapa de salida se inhabilita (modo silencio). Si la tensión de alimentación vuelve a estar dentro de los límites permitidos, las salidas se habilitan de nuevo. Para calcular los valores de componentes asociados, vea las hojas de características. Teóricamente, el amplificador debería llegar a situación de bloqueo cuando se detecte una sobre-tensión de forma constante. Sin embargo, eso es muy improbable, porque la detección de ambas entradas necesita más de 68 V antes de responder. Esto es así principalmente para proteger el circuito integrado, porque varias de las tensiones de los condensadores deben ser al menos 63 V. Los cálculos para la protección de sobre-corriente son ciertamente más interesantes que los de protección contra tensión, debido a que ello determina la mínima impedancia de carga que el amplificador puede soportar a la potencia de salida máxima. Debido a que la etapa de salida opera en modo conmutado, los MOSFETs usados en el circuito determinan la capacidad de carga máxima del amplificador. Aquí nosotros hemos seleccionado un dispositivo relativamente pesado de ST Microelectronics, el STW38NB20. Este transistor, que está encapsulado en un TO-247, puede manejar hasta 38 A y tiene una tensión máxima de drenador-fuente de 200 V. La resistencia máxima de canal con una tensión de puerta-fuente (UGS) de 10 V es de 0,065 Ω (ID = 19 A). Una desventaja de los MOSFETs con esta clase de especificaciones es que su capacitancia de entrada (CISS) es más bien grande, en este caso como mucho 3.800 pF. Eso explica que los drivers en el integrado deben poder manipu- lar corrientes importantes para poder conmutar rápidamente los MOSFETs. Nosotros elegiremos principalmente esos transistores para reducir el riesgo de sorpresas desagrables cuando usemos sistemas de altavoces con impedancias desconocidas. Naturalmente, el que se produzca una perforación se hará en menos tiempo si la capacitancia del transistor es significativamente menor, lo cual reducirá el nivel de distorsión. Sin embargo, nuestra elección fue a favor de un diseño que pueda tolerar bajas impedancias. La detección de sobre-corriente se produce a través de las dos resistencias de baja inductancia R6 y R11 (R27 y R32), las cuales se conectan en serie con los transistores como una resistencia de sensado. R6 se utiliza para los medio ciclos positivos en serie con el drenador de T1, mientras que R11 se usa para el medio ciclo negativo en serie con la fuente de T2. La respuesta de nivel del circuito de protección se fija en combinación con R21. El integrado mide directamente las tensiones en las resistencias de sensado y utiliza esas tensiones para generar una corriente a través de R21. La salida máxima se determina comparando la tensión en R21 con la tensión VTOC producida por la sobre-corriente. C13 (C16) filtra la tensión del rectificador. La relación entre esos componentes viene dada por medio de las siguientes ecuaciones: Imax = 3580 ⫻ (VTOC – (Ibias ⫻ R21)) ⫼ (R21 ⫻ R6) R21 = (3580 ⫻ VTOC) ⫼ (Imax ⫻ R6 + 3580 ⫻ Ibias) Aquí VTOC es la tensión de disparo para la detección de sobre-corriente (típicamente 0,97 V) e Ibias es 20 μA. 43 La primera ecuación se puede recolocar fácilmente para permitir calcular los valores de los componentes. La segunda ecuación se puede usar para determinar el valor de R21 (R42). Nosotros hemos elegido una corriente de salida máxima de casi 20 A, así que una carga de menos de 3 Ω evita el disparo del modo silencio. El modo silencio sólo se puede resetear conmutando brevemente el nivel de la entrada Mute o apagando brevemente el amplificador. Cuando el modo silencio está activo, la salida HMUTE está a nivel alto, y esta señal excita un LED que se puede fijar en el panel frontal si lo deseamos. Debemos usar un LED rojo de alta eficiencia para este propósito, porque una reducción del valor de R43 sobrecargaría la salida. Tensión de alimentación Las tensiones de alimentación para la placa del amplificador se suministran en la segunda placa de circuito impreso. Esta placa incluye, entre otras cosas, las alimentaciones de +5 V y VN10, y los fusibles para las tensiones de alimentación de red. También suministra una señal retardada para evitar el ‘punteo’ que se produce en la conexión de alimentación. Para evitar crear un bucle de tierra y corrientes de rizado que circulen desde la etapa de entrada a masa, se aplica la señal de silencio (mute) al integrado, a través de un optoacoplador. Se coloca en la placa del amplificador. La entrada del optoacoplador está completamente aislada del amplificador, y se requiere una señal activa para conmutar la entrada Mute del amplificador. Las tensiones de alimentación de red (VPP y VNN) para el TA3020 están desacopladas tanto como es posible 44 usando condensadores electrolíticos especiales (C30, C31, C34 y C35) y condensadores MKT (C32, C33, C36 y C37). Para la tensión de alimentación de 5 V de los amplificadores de entrada sólo se usa una simple red de desacoplo. Para suprimir posibles interferencias del circuito de salida tanto como sea posible, las masas analógicas y masas del modulador (la cual también es la masa del resto del circuito) se deben mantener separadas y unidas en la cara de soldadura de la placa en un simple punto, usando una bobina SMD. Layout Como ya mencionamos al comienzo de este artículo, el diseño de la placa del amplificador se debe hacer con sumo cuidado. Las pistas deben formar una parte esencial de todo el amplificador. La casa Tripath recomienda encarecidamente copiar todas las pistas, ya que de otro modo las grandes corrientes de alta frecuencia producirán una caída con efectos no deseados. Naturalmente, algunos de los componentes seleccionados difieren de los usados en la placa de referencia, principalmente en cuanto a sus dimensiones. Esto es porque damos una especial atención a la disposición de los componentes. Algunas de las pistas han sido desplazadas sensiblemente en algunos lugares, y se han añadido unos pocos componentes, pero en general mantenemos la placa recomendada. Si tenemos algún problema ojearemos las fotografías de la placa de referencia en las hojas de características, para observar el ensamblaje del prototipo. Algunos de los componentes mostrados en el esquema que tenemos colocado en la cara de soldaduras de la placa de Tripath, los hemos colocado, en su lugar, en la cara de componentes. Esto es porque la placa del circuito está colocada en paralelo al disipador en nuestra versión, con los transistores montados debajo de la placa. Esto produce un módulo compacto, atractivo y robusto, que nos ahorrará comentarios para la construcción descrita en la segunda parte del artículo. Podemos afirmar que aunque el módulo parece muy sencillo a primera vista, un examen más profundo nos permitirá descubrir que comparado con el esquema, parece que algunas cosas se han perdido. Muchos de los componentes son de tipo SMD y están colocados en la cara de soldadura de la placa. Esto nos ayuda a evitar los problemas de interferencia y nos da como resultado una placa amplificadora con unas dimensiones muy modestas para una potencia de 2 x 300 W. La mayoría de los dispositivos SMD vienen en formato 0603, el cual no es el mejor para trabajar. Para hacer las cosas más fáciles, intentaremos alimentar la placa del circuito en un futuro próximo con los componentes SMD ya colocados. En la segunda parte de este artículo (Septiembre 2004), veremos con detalle la construcción de este inusual amplificador. (030217-1) Páginas web Hojas de características y notas de aplicación del TA3020: www.tripath.com/downloads/ TA3020.pdf Placa de referencia TA3020 -www.tripath.com/downloads/RBTA3020.pdf elektor libros libros libros libros libros libros libros libros CorelDRAW 12 Por Steve Bain ISBN 84-415-1727-4 656 páginas Editorial Anaya Multimedia Para desenvolverse en el mundo de la ilustración y el diseño gráfico, es necesario controlar los programas que se utilizan en el sector. CorelDRAW es una de las aplicaciones de diseño gráfico y animaciones vectoriales más conocidas en la actualidad, tanto para la impresión como para la Web. Esta nueva versión incluye interesantes novedades, donde destacan la herramienta de dibujo inteligente, con la que se pueden dibujar a mano alzada formas más o menos regulares, dejando que el propio programa trace con precisión la forma final; un sistema más avanzado de detección de puntos de anclaje y la introducción de las guías dinámicas, que aumentan la exactitud en la ubicación de los objetos. Este libro saca el máximo partido a todas las funciones de la aplicación. Aprenderá a dibujar objetos, añadir color y efectos, trabajar con texto y crear animaciones. Cientos de trucos y notas lo convierten en un recurso prácticamente obligatorio para los que deseen crear trabajos artísticos con CorelDRAW. elektor Diseño comercial con Photoshop Por Bert Monroy ISBN 84-415-1726-6 320 páginas Editorial Anaya Multimedia Photoshop CS inaugura una nueva etapa en el tratamiento digital de imágenes. A las ya habituales cualidades de este software de edición se suman ahora nuevas características dirigidas a facilitar el proceso creativo, y permiten el uso de este producto como medio artístico para producir trabajos comerciales. “Diseño Comercial con Photoshop CS” se convierte así en el libro fundamental para todos aquellos lectores que deseen descubrir la infinidad de técnicas y enfoques de los que disponen para encaminar sus proyectos comerciales. Mediante explicaciones descriptivas y muy accesibles, conocerá como este software constituye una parte integral e importante del proceso de producción. Esta obra facilita las claves para la creación de composiciones llamativas y profesionales. El CD-ROM adjunto contiene los numerosos ejemplos desarrollados a lo largo del libro, con el objetivo de mejorar y complementar la comprensión de la obra. Mac OS X Panther Por Brad Miser ISBN 84-415-1715-0 1.072 páginas Editorial Anaya Multimedia El CD-ROM adjunto incluye diversas herramientas, aplicaciones y utilidades para obtener el máximo partido. Crea y presenta tu Portafolio Digital Por Cynthia L. Baron ISBN 84-415-1729-0 320 páginas Editorial Anaya Multimedia La última versión que Apple ha lanzado al mercado de Mac OS X se ha revelado como la culminación de un sistema operativo que destaca en cuanto a su estabilidad, rendimiento y a su riqueza de prestaciones. Desde aplicaciones más eficaces y potentes, a un funcionamiento novedoso, o su desarrollada interfaz: esta nueva versión se convierte en definitiva en la última etapa de un proceso de perfeccionamiento encaminado a satisfacer las necesidades y requerimientos de los usuarios. La Biblia de Mac OS X tiene como finalidad proporcionar contenidos tanto de referencia como de utilidad para el aprendizaje, descubriendo herramientas y funciones cada vez más sofisticadas. En este manual el usuario hallará información accesible y práctica, desde un amplio tratamiento de las funciones centrales del escritorio, a aspectos específicos como la interacción del sistema con Internet o la posible incorporación de dispositivos para la expansión y optimización del rendimiento de Mac OS X. Tanto si está estudiando como si es un profesional del diseño, sabrá que un portafolio digital es la más importante de sus posesiones. Un portafolio cubre una amplia serie de elementos: adjuntos PDF, presentaciones en CD, demos en DVD, trabajo albergado en portátiles y sitios Web. Puede incluir texto, fotografía, ilustraciones, diseño gráfico, interactividad, animación y material de vídeo. Este libro es una guía para diseñar, producir y mostrar un portafolio digital, elemento muy importante a la hora de conseguir nuevos proyectos, clientes y trabajos. Contiene excelentes ejemplos provenientes de portafolios de trabajo de gran calidad. Siguiendo las pautas de este libro podrá organizar su trabajo para conseguir un mayor efecto en el mercado, evitando los riesgos que existen al digitalizar, organizar y entregar el producto final. 45 Paul Goossens Diseño de Nuestro Propio Circuito Integrado CPLDs en la práctica (II) Siguiendo la descripción del circuito que se entregó en el número del pasado mes, es el momento de comenzar a trabajar con la placa de experimentación. Suponemos que nuestros lectores ya tienen instalado el programa Altera y que han leído su correspondiente manual. 46 El diseño de circuitos digitales normalmente equivale a dividir repetidamente el problema en partes más pequeñas hasta que, finalmente, llegamos a un diseño que consiste en una variedad de funciones lógicas básicas. Basándonos en este fundamento, podemos desarrollar el circuito electrónico y, si fuese necesario, llegar a fabricar la placa de circuito impreso. Lenguajes descriptivos El diseño de circuitos lógicos digitales es más fácil si utilizamos un lenguaje descriptivo. El propósito de este tipo de lenguajes es el de permitirnos realizar funciones específicas y describirlas (de ahí su nombre). Un lenguaje descriptivo permite que se pueda utilizar un programa inteligente para diseñar un circuito electrónico que cumple con la descripción especificada por el diseñador. En la actualidad existen varios lenguajes descriptivos diferentes, dos de ellos han sido desarrollados por fabricantes independientes y son soportados por un gran número de fabricantes: Verilog y VHDL. En este artículo vamos a utilizar el lenguaje Verilog como nuestro lenguaje descriptivo. Verilog Hemos utilizado el lenguaje Verilog debido a que es algo más fácil de entender que el lenguaje VHDL. Sin embargo, los dos lenguajes son bastante similares en la mayoría de los aspectos. La mayor diferencia entre ellos estriba en cómo se formulan las distintas descripciones. Esto significa que muchas de las consideraciones, pequeñas dificultades y el modo de realizar las descripciones, que se van a ver en este artículo, son también aplicables directamente sobre el lenguaje VHDL. elektor Es posible generar diseños jerárquicos utilizando el lenguaje Verilog. Esto significa que el diseño se puede dividir en diseños más pequeños. Estos diseños más pequeños pueden, a su vez, dividirse en varios "sub-diseños” más pequeños si fuese necesario. En el idioma Verilog, estos subdiseños son denominados "módulos". La división de un diseño en muchos modelos tiene el beneficio de permitir volver a utilizar los módulos en otros diseños diferentes. Un contador es un ejemplo de un tipo de módulo que se puede utilizar relativamente a menudo, por eso sería una buena idea colocar un contador en un módulo independiente. CLK CPLD EPM7128 1 030385 - 2 - 11 Ejemplo 1 La mejor manera de aprender algo es hacerlo. En consecuencia, vamos a comenzar directamente con un ejemplo, pero antes debemos descargar los ejemplos de la página web de Internet de Elektor (www.elektor-electronics.co.uk). Los distintos ejemplos están localizados bajo el número 030385-11, dentro de los artículos del mes de Junio. Todo lo que tendremos que hacer, una vez descargado, es descomprimir el fichero .zip. El Ejemplo 1 lo podemos encontrar en el directorio Ex1. Tan sólo tendremos que hacer doble clic sobre el fichero ex1.quartus y el programa de diseño se iniciará de manera automática. En el diagrama eléctrico que se muestra podemos ver los distintos terminales de E/S del circuito integrado que está conectado al bloque en el que se indican un conjunto de distintas señales. Estas señales son las entradas y salidas de este bloque. Tal y como nuestros lectores han podido ver en el manual (suponemos que ya han leído el manual, ¿no?), podemos ver el correspondiente código fuente asociado haciendo doble Figura 1. Esquema eléctrico de un oscilador de cristal estándar. clic en el bloque correspondiente. En este caso, el código fuente está escrito en el lenguaje Verilog. El texto que se muestra en verde son todos los comentarios que están relacionados con el programa Verilog, por lo que no tendrá ningún efecto sobre el resultado final. Sin embargo, el lenguaje Quartus utiliza estas líneas para almacenar información, de manera que es buena idea dejarlas tal y como están. Estructura El código fuente del lenguaje Verilog siempre está organizado utilizando la misma estructura. Siempre se inicia con la declaración del módulo. Esta parte del código empieza con la palabra "module”, seguido por el nombre del mismo. A continuación, se acompaña con una colección de entradas y salidas colocadas entre paréntesis, y separadas por comas. El conjunto completo se termina por un punto y coma (;). Todo esto se puede ver en 47 Tabla 1. Funciones Booleanas & = AND ~& = NAND | = OR ~| = NOR ~ = NOT ^ = XOR ~^ = XNOR las líneas 30-35 de nuestro ejemplo. La siguiente cosa que tendremos que hacer es definir las direcciones de las señales (puertos) identificados en la declaración del módulo. Podemos ver cómo se hace esta tarea analizando las líneas 39-45 de nuestro ejemplo. Disponemos de tres opciones para cada señal: entrada (input), salida (output) y bidireccional (inout). En nuestro caso sólo hemos utilizado entradas y salidas. Cada línea está finalizada por un “;”. En la primera línea podemos ver que se han definido varias señales en una única línea, siempre y cuando se utilicen comas para separar las distintas definiciones. Las salidas requieren una especificación adicional. Si la función de una salida está descrita en una sentencia de un procedimiento (no se preocupen, más adelante explicaremos qué significa esto), dicha salida debe ser del tipo reg (register = salida de un biestable). En la línea 47, las señales D2, D3 y D4 se han definido como registros. Ahora que ya somos conscientes de las distintas dudas administrativas, podemos empezar a trabajar con nuestro diseño actual. Este ejemplo es muy sencillo. En él vamos a demostrar los modos en que pueden describirse las señales utilizando álgebra Booleana. El lenguaje de programación Verilog hace esta tarea de dos maneras diferentes: utilizando la sentencia “assign” (asignar), o mediante lo que se denomina una "sentencia de procedimiento". El Listado 1 muestra un ejemplo de cada uno de estos métodos. El primer método se demuestra en la línea 50. En dicha línea, la descripción dice que la señal D1 es el resultado de una operación AND con las señales S1–S4. Ésta es otra manera de decir que la señal D1 está activa solamente si las señales S1–S4 también están activas (1 lógico). En el resto de los casos la señal D1 está inactiva (0 lógico). 48 Tabla 2. Operadores aritméticos. Tabla 3. Operadores relacionales + = suma > mayor que - = resta > = mayor que o igual a * = multiplicación < menor que / = división < = menor que o igual a % = módulo = = igual a ! = no igual a El símbolo “&”representa la función AND. En la Tabla 1 se da un resumen de las distintas funciones Booleanas del lenguaje Verilog. Sentencias de procedimientos Las salidas que quedan (D1–D4) se describen en una sentencia de procedimiento. Las sentencias de procedimientos están siempre precedidas por la palabra “always” (siempre). Esta palabra clave se describe con más detalle en uno de nuestros últimos ejemplos. Al igual que sucede con el lenguaje de programación Pascal, podemos combinar un grupo de sentencias en una unidad utilizando las palabras clave “begin” y “end” (principio y fin). Todas las sentencias comprendidas entre estas dos palabras son tratadas de manera colectiva como si fuese una única sentencia. Si nos fijamos en la línea 54, veremos que la señal D4 ha sido descrita como una señal que pasa a estar activa si S1, S2, S3 o S4 están activas a su vez. Hemos utilizado las palabras “pasa a estar activa”en lugar de "está activa", de manera intencionada. El símbolo “<=” equivale a decir que "pasa a valer" o "asume el valor". Como regla general, podemos decir que este símbolo se utiliza en una sentencia de procedimiento en lugar del signo “=”. Teniendo esto presente, no nos debe resultar difícil imaginar las funciones de las señales D3 y D4 si utilizamos la Tabla 1 como una herramienta de ayuda. La ventaja de trabajar con señales en una sentencia de procedimiento en lugar de trabajar con la sentencia “assign” la veremos más clara en uno de los ejemplos finales. Por último, la palabra clave endmodule indica que la descripción del módulo correspondiente ha finalizado. La compilación En este momento ya estamos más cerca del punto en el que tenemos que "arremangarnos" y ponernos de lleno con el trabajo. En primer lugar, el diseño tiene que ser compilado. El compilador ya conoce exactamente qué señal debe estar conectada a cada terminal de la CPLD. Esto se debe a que nosotros ya hemos realizado este trabajo por nuestros lectores. Esto hace que el proceso de compilación sea un juego de niños. Así, tan sólo tendremos que pulsar sobre la opción Star Compilation (Iniciar Compilación) en el menú “Processing” (Procesamiento) y el programa comenzará a trabajar. En la pantalla se presentará un determinado número de mensajes y algunas barras de desplazamiento se moverán a lo largo de la pantalla. Después de un cierto tiempo, el programa informará que la compilación se ha realizado con éxito. Esto significa que se ha creado un fichero de programación que podemos utilizar para programar nuestro circuito integrado. La programación Como ya mencionamos en la primera parte de este artículo, para programar la CPLD necesitaremos el programador JTAG que se describió a finales del año 2002 en Elektor. Por supuesto, también necesitaremos un módulo Altera ByteBlaster original. Para hacer todo este trabajo, estamos suponiendo que nuestro programador está conectado al puerto de impresora de nuestro ordenador y que el conector JTAG de dicho programador está conectado al conector K2 de la placa de experimentación. En este momento daremos alimentación a la placa de experimentación. En el programa Quartus lo primero que tendremos que hacer será seleccionar el menú Tools (Herramientas) elektor Listado 1. Álgebra Booleana 50 assign D1 = S1 & S2 & S3 & S4; 51 52 always 53 begin 54 D2 <= S1 | S2 | S3 | S4; 55 D3 <= ( S1 & S2) | (S3 & S4); 56 D4 <= ~(S1 & S2 & S3 & S4); 57 end y dentro del la opción Programmer (Programador) se abrirá una nueva ventana. Verificaremos que el programador está configurado en “JTAG” y que tenemos seleccionado el interfaz correcto (ByteBlaster). En esta ventana, hay una línea que tiene el mensaje “EPM7128SLCM” en la columna Device (Componente). En la misma línea, el fichero de programación ex1.pof se muestra en la columna File (Fichero). En este momento todo está listo para programar la CPLD. Lo único que tenemos que hacer es decirle al programa que queremos programar este circuito integrado, colocando una pequeña marca bajó la columna Program/Configure (Programar/Configurar). Por último, pulsaremos sobre la opción Star Programming (Iniciar Programación), que está localizado en la parte más superior y que hace la función del botón Play (Ejecutar). La verificación Después de haber sido programada, la CPLD pasa a estar activa casi inmediatamente, lo cual significa que el diseño programado puede usarse a partir de este momento. Deberemos asegurarnos que los puentes JP1 y JP2 están montados. La verificación del diseño es bastante sencilla. El diodo LED D1 sólo debe encenderse si todos los conmutadores están en la posición”1”. En el resto de los casos, el diodo LED debe estar apagado. Por el contrario, el diodo LED D4 debe comportarse exactamente al contrario. Esto significa que si el diodo D1 está encendido, el diodo D4 debe estar apagado y viceversa. Anteriormente hemos descrito la señal D2 como una función OR, lo que significa que este diodo LED debe estar encendido si uno o más conmutadores están en la posición “1”. elektor El diodo LED D3 debe permanecer encendido siempre y cuando S1 y S2 estén ambos en el estado “1”, o S3 y S4 estén ambos en el estado “1”. Estas funciones se pueden verificar fácilmente utilizando los conmutadores. Ahora, el intento de modificar el diseño en el programa Quartus hará que el diodo LED D1 se encienda, siempre que S1 esté en la posición “1” y S2 esté en el estado “0”. El estado de los otros conmutadores no nos afecta. ¡Buena suerte con su diseño! Ejemplo 2 Como ya hemos mencionado anteriormente, el Ejemplo 1 es bastante sencillo. La potencia especial del lenguaje Verilog es que permite a los diseñadores desarrollar diseños de una manera más descriptiva. En ocasiones, el álgebra Booleana puede ser bastante práctica, aunque, en verdad, la intención real no es que los diseños relativamente más complejos tengan que estar creados enteramente con dicha álgebra Booleana. Esto se puede demostrar fácilmente utilizando el Ejemplo 2, en el que vamos a tratar de diseñar dos biestables y un circuito “latch”. Los ficheros para trabajar con el Ejemplo 2 podemos encontrarlos en el directorio ex2. En este directorio, abriremos el fichero ex2.quartus y el programa abrirá, de manera automática, el resto de los ficheros necesarios. En el esquema eléctrico del ejemplo (ex2.dbf) podemos ver que los conmutadores S1–S4 están conectados para trabajar como un bloque funcional denominado “flipflop” (biestable). El conmutador S1 está conectado a la entrada CLK, etc. Seguidamente, haremos doble clic sobre el bloque correspondiente para abrir el código fuente Verilog asociado. Siempre @ Hasta llegar a la línea 46 no hay nada distinto que ver. Pero en la línea 46 podemos ver algo nuevo que se ha añadido con la palabra clave always: el símbolo de carácter @ seguido por una comparación. Este segmento de código también se puede ver en el Listado 2. El carácter @ indica que en la sentencia de procedimiento que pertenece a esta sentencia always, sólo se permite que sea evaluada (aunque no ejecutada, es decir, sólo el procesador ejecuta la sentencia), si la siguiente condición de comparación ha sido satisfecha. En este caso, esto quiere decir que la siguiente sentencia solamente será aplicable en el momento en que la señal de reloj (CLK), o la señal de reset, o la señal SET, tengan un flanco de subida (posedge). Para evitar cualquier tipo de compilación, vamos a aclarar que un flanco de subida es la transición de un nivel bajo a un nivel alto. El lenguaje Verilog también dispone del modificador “negedge”, que traducido quiere decir "flanco negativo" o "flanco de bajada". Si cualquiera de estas condiciones se satisface, esta sección de código será evaluada. Primero se realiza una comprobación para ver si la señal de RESET está a nivel lógico “1”. Si ese es el caso, la salida OUT pasa a estar inactiva (nivel lógico “0”) y este segmento de código estará ejecutado. Por otro lado, se realiza una comprobación para ver si la señal SET está a nivel lógico “1”. Si eso es así, la salida OUT pasa a nivel lógico "1" y el código se ejecuta. Además de los valores lógicos "1” y “0”, cada señal también puede asumir el valor 'x" (desconocido) o “z” (alta impedancia). Si ninguna de las señales RESET o SET está a nivel lógico "1", la señal CLK debe tener un flanco de subida, ya que si no fuese así el código no habría sido evaluado. La intención es que, en el flanco de subida de la señal 49 Listado 2. Un biestable sincronizado 46 always @ (posedge CLK or posedge RESET or posedge SET) 47 begin 48 if (RESET) 49 50 OUT <= 1’b0; else if (SET) 51 52 OUT <= 1’b1; else 53 54 OUT <= D; end de reloj, la salida del biestable tome el valor presente en la entrada. Pero, ¿qué sucede con la salida cuando no hay un flanco de subida en las señales CLK, RESET o SET? La respuesta es muy sencilla, nada, la señal OUT ha sido definida para ser un registro, lo cual significa que el valor más reciente que se ha asignado a dicha señal debe mantenerse. En el caso de que el código no esté activo, el valor de este registro no sufrirá ningún cambio. Al añadir el carácter “@” a la sentencia always estamos indicando al programa que evalúe el trozo de código que sigue a esta sentencia. Durante el resto del tiempo, la salida que está controlada por este bloque debe permanecer inalterada. Observando detenidamente el código podemos ver claramente que la entrada RESET tiene una prioridad más elevada que la entrada SET. Sin embargo, esto no significa que el circuito integrado CPLD evalúe estas dos señales una después de la otra cuando entra en funcionamiento. La CPLD responderá con igual rapidez tanto a la señal RESET como a la señal SET. La secuencia sólo es importante para el compilador. El compilador evalúa una sección de código y determina qué debe suceder en la salida para cada combinación imaginable de las señales de entrada. Basándose en esta evaluación, el compilador "diseña" una especie de lógica digital que responde exactamente a la manera que se ha descrito en el código. Variaciones sobre un mismo tema En el esquema eléctrico ex2.dbf también se muestra un segundo biestable (nombrado muy apropiadamente “flipflop2”). El fichero Verilog asociado es muy similar al fichero para el 50 primer biestable. La única diferencia con respecto al primer biestable es que el estado de la señal SET se verifica antes que el estado de la señal RESET. Esto significa que para este biestable la entrada SET tiene una prioridad más elevada que la entrada RESET. Por lo tanto, la salida pasará a nivel lógico "1" si las entradas RESET y SET tienen las dos un valor lógico "1". En el primer biestable que hemos estudiado, la salida estaría a nivel lógico "0" en esta misma situación. Latch El bloque final del esquema eléctrico es un “latch” (básicamente un latch es un circuito que mantiene el estado de las señales de su entrada en su salida, aunque las entradas hayan variado su estado). Un latch es un componente electrónico que también se utiliza frecuentemente en diseños digitales. El funcionamiento de un latch es bastante sencillo. Mientras que su entrada de reloj permanezca a nivel lógico "1", las salidas del latch deben tomar el mismo valor lógico que sus entradas. Si el estado de las entradas cambia, las salidas deben seguir inmediatamente este cambio. Por el contrario, si la señal de reloj está inactiva (nivel lógico "0"), se retiene el último valor lógico conocido de las salidas, sin tener en cuenta cualquier cambio posterior que se haya producido en el estado de las entradas. El fichero Verilog latchexample.v muestra cómo se puede escribir este funcionamiento en el lenguaje Verilog. La señal de salida puede cambiar si el estado de la señal de reloj cambia o el estado de la entrada de datos cambia. Esto puede suceder tanto en el flanco de subida como en el flanco de bajada. Después del carácter @ podemos ver “(posedge CLK o D)”. Lo que tiene de especial esta sentencia es que la señal D ha sido declarada sin tener el indicativo”posedge” delante. Esto significa que el código debe ser evaluado para cada cambio que se produzca en el estado de la señal D. En el trozo de código que pertenece a la sentencia always , podemos ver que el compilador verifica primero el estado de la señal de reloj. Si la señal de reloj está activa (nivel lógico "1"), la salida toma el mismo valor que la entrada. En cualquier otra situación no se produce ningún cambio y el estado actual de la salida permanece sin variación. Podemos compilar este ejemplo y programarlo sobre la CPLD de la misma manera que hemos hecho para los ejemplos anteriores. Después de hacer esto, utilizaremos la tarjeta de experimentación para verificar que el diseño actualmente cargado hace lo que en teoría estamos esperando que haga. Después de todo esto, como ejercicio adicional, podemos ver qué sucede cuando proporcionamos al latch la opción de disponer de las entradas SET y RESET. Como suele decirse, la práctica es lo más perfecto. La aritmética Los ejemplos previos han demostrado cómo se describen las funciones sin tener que preocuparnos del estado de las puertas lógicas, del álgebra Booleana, y temas similares. Después de trabajar con el lenguaje Verilog durante un cierto tiempo, cualquier diseñador habrá podido darse cuenta de ello perfectamente. Nuestro tercer ejemplo nos muestra que la aritmética tampoco es una tarea difícil con el lenguaje Verilog. En este ejemplo vamos a utilizar contadores. Un contador necesita señales de reloj, por lo que será con esto con lo que comenzaremos. La Figura 1 muestra el esquema eléctrico de un oscilador de cristal estándar. elektor Listado 3. La sentencia “case” y el agrupamiento de señales en un array 59 always @ (COUNT) 60 begin 61 case (COUNT) 62 4’d0 : SEG=7’b1111110; 63 4’d1 : SEG=7’b0110000; ……………………………………………….. 71 4’d9 : SEG=7’b1111011; 72 default : SEG=7’b0000001; 73 endcase 74 end 75 76 always @(SEG) 77 {SEGA,SEGB,SEGC,SEGD,SEGE,SEGF,SEGG} = SEG; Si exceptuamos el circuito inversor, el resto de los componentes de ese esquema están presentes en la placa de experimentación. Si colocamos ahora un inversor entre los terminales 71 y 81 del circuito integrado CPLD, habremos creado un oscilador de cristal. Abra el Ejemplo 3 para ver el dibujo del inversor entre estos dos terminales del circuito integrado, en la parte superior del esquema eléctrico. Una vez que la CPLD ha sido programada, el resultado de esto es la creación de un oscilador cuya salida (terminal 81 en la placa del circuito) está conectada al terminal 83 de la CPLD. Esta entrada está diseñada especialmente para trabajar como una entrada de reloj. Los arrays Suponemos que nuestros lectores están familiarizados con ejercicios de aritmética en el sistema numérico binario. Si es así, también será fácil imaginar que los números normalmente también son representados como un grupo de señales. En el lenguaje Verilog distintas señales pueden ser agrupadas de manera conveniente en una estructura denominada “array”. En el fichero Verilog utilizado para el bloque Count (Contador), podemos ver lo siguiente en la línea 40: “output [7:0] D;”. Esta sentencia específica la creación de un array de ocho señales (D[7] ... D[0]). Este grupo de señales se puede escribir de manera colectiva como “D”. Para evitar posibles confusiones, vamos a explicar lo que se hace en la línea 47. En dicha línea se declara una nueva señal. Esta señal no está presente en el módulo de declaración, lo que significa que no es visible de manera externa (es decir, fuera del módulo). Por lo tanto, esta señal tan sólo se podrá utilizar de manera interna. elektor La siguiente línea interesante es la 51: “temp = temp +1;”. Esto nos indica que podemos contar en una unidad simplemente utilizando el signo “+”. La Tabla 2 muestra los operadores aritméticos adicionales que pueden ser utilizados con arrays en el lenguaje Verilog. En la línea 52 podemos ver la comparación (“= =”), que señala que hay que verificar que el término del lado izquierdo de este símbolo es igual al término colocado en el lado derecho del mismo. Todos los operadores de relación (tales como “= =”) están listados en la Tabla 3. El número 24’d4000000 puede parecer un poco extraño a primera vista. Ésta es la notación para describir números en el lenguaje Verilog. El primer número de dicha anotación indica cuántas señales están involucradas en dicho número (en este caso, 24). La letra “d” significa que la constante se ha introducido con anotación decimal. Por último, “4000000” es el valor actual de la constante. En este caso debemos utilizar 24 señales, ya que el registro temp está constituido por 24 señales. Debemos señalar que en el lenguaje Verilog, 24 ceros no es lo mismo que 23 ceros. Esto significa que debemos estar seguros de que en cada lado del símbolo “= =” está presente el mismo número de señales. El contador Si analizamos el código en el lenguaje Verilog podemos ver que el valor del registro temp se incrementa en una unidad con cada pulso de reloj. Tan pronto como el registro alcanza el valor de 4.000.000, el registro D se incrementa tomando el valor lógico "1", con lo que temp pasa a valer "0" lógico y la salida SLOW pasa a tomar un valor lógico "1". Si el registro temp no ha alcanzado todavía el valor 4.000.000, la salida SLOW recibe el valor lógico "0". Con una señal de reloj de 4,000 MHz, el valor del registro D se incrementa en una unidad por cada segundo, teniendo en cuenta que la salida SLOW toma brevemente el valor lógico "1". Así pues, la señal SLOW se comporta como una señal de reloj de 1 Hz. Contador BCD La señal de reloj de 1 Hz se lleva al bloque de entrada de un contador BCD. Esta entrada está etiquetada con el nombre “BCD counter” (contador BCD), en el esquema eléctrico del circuito. El código en el lenguaje Verilog para el contador BCD tiene tres secciones separadas, cada una de las cuales comienza con la sentencia always. Además, debemos señalar que se han declarado dos registros para su uso interno. Estos registros son SEG y COUNT. La primera función (que se inicia en la línea 52) es un contador que provoca que el registro COUNT cuente desde 0 a 9. Cuando dicho registro alcanza el valor 10, COUNT se vuelve a cargar con el valor 0. La segunda función se ejecuta cada vez que el registro COUNT cambia su estado. En la línea 60 encontraremos una nueva sentencia con nombre case. Un ejemplo de esta función lo podemos encontrar en el Listado 3. Los programadores en el lenguaje C encontrarán familiar este concepto. En esta instancia, la sentencia case dispone de un argumento (COUNT). Esto significa que las líneas siguientes: "4'd0 : SEG=7'b1111110; 4'd1 : SEG=7'b0110000;" pueden ser traducidas como: if (COUNT==4'd0) SEG=7'b... else if (COUNT ==4'd0 SEG=..." y así sucesivamente. 51 aplicaciones interesantes hechas por ellos mismos sobre la placa de experimentación. ¡Buena suerte! (030385-2) Direcciones en Internet La línea que comienza con la palabra “default”se procesa si el valor actual del registro COUNT no aparece en la lista. La última sección del código escrito en el lenguaje Verilog se inicia en la línea 75. Como podemos ver, esta línea se evalúa si el valor del registro SEG cambia. Una prestación interesante del lenguaje Verilog la podemos ver en la línea 76: distintas señales pueden agruparse en un array utilizando los caracteres “{“ y “}”. Puesto que el registro SEG se ha convertido en un array y las salidas de una pantalla de siete segmentos han sido declaradas como señales individuales, estas señales también deben combinarse en un array. Otra posible solución sería la de asociar cada señal con un elemento del array, utilizando por ejemplo: "SEGA = SEG[6];" Este método también trabaja bastante correctamente, pero hace que el código sea un poco más largo y parece algo más difícil de leer. Verificación Teniendo en mente la verificación de este ejemplo, tenemos que hacer mención de una deficiencia en la placa de experimentación. Cuando la CPLD está siendo programada, todas sus salidas asumen que están en un estado no activo. Inmediatamente después de haber sido programada, la CPLD pasa a estar activa. Como resultado de todo esto, el oscilador no se inicia de manera adecuada. Esto significa que, una vez que haya- 52 mos programado la CPLD, tendremos que hacer brevemente un reset sobre la misma. Podemos realizar esto colocando un pulsador de un solo contacto entre los terminales 2 y 20 del conector K6. Otra alternativa sería la de retirar brevemente la tensión de alimentación y volverla a colocar de nuevo. Conclusión Podemos realizar una gran cantidad de experimentos adicionales con el lenguaje Verilog, aparte de los que ya se han descrito en este artículo. En este ejemplo nos hemos limitado a utilizar las características más habituales del lenguaje Verilog. Aún así, estas características permiten a los usuarios hacer diseños de funciones digitales bastante complejas. En Internet podemos encontrar varios sitios donde se habla de una gran variedad de diseños que utilizan el lenguaje Verilog. Estudiando y simulando los diseños que aquí podemos encontrar, podremos adquirir rápidamente una experiencia interesante en este lenguaje. Un aspecto importante que no hemos sido capaces de tratar en este artículo (debido a la falta de espacio) es la simulación de diseños en el programa Quartus. El manual del programa Quartus nos debe ayudar bastante sobre este tema, aunque también tendremos siempre la ayuda de la función “Help”. Como comentario, es buena idea desarrollar un diseño en pequeñas partes y simular estos pequeños “subdiseños” uno por uno, de manera que sea más fácil determinar si están trabajando como deberían hacerlo. Nos gustaría recibir de nuestros lectores cartas que nos comenten las http://www.altera.com/support/ examples/verilog/verilog.html http://www.asic-world.com/verilog /index.html Advertencias - Un módulo puede estar formado por diferentes segmentos de código, cada uno de los cuales está precedido por la sentencia “always”. En nuestro caso, la limitación es que una salida solamente puede ser definida en un único segmento de código. Para poder superar esta limitación, el diseñador puede definir dos señales (como si fuesen hilos T1 y T2), y controlar estas dos señales utilizando segmentos de código separado. De esta manera, la salida actual puede ser definida como una función Booleana de estas dos señales. - Debemos asegurarnos que los biestables presentes en el diseño responden al mismo flanco de señal (tanto si es de subida como si es de bajada). Esto nos permite obtener un diseño más eficiente y rápido. - Siempre tendremos que tener en cuenta que el compilador evalúa el código. Lo principal de esto es que dicha evaluación es diferente de lo que sucede cuando un procesador ejecuta un segmento de código. Si un diseño contiene diferentes segmentos que utilizan la palabra clave “always”, estos segmentos se ejecutarán, en el momento adecuado, de manera simultánea. elektor libros libros libros libros libros libros libros libros Elektor ofrece a sus lectores una selección de libros técnicos de gran valor para aficionados y profesionales. Todos ellos están escritos en inglés, el idioma más utilizado en el ámbito técnico. SERIE 300. Circuitos y aplicaciones: 301 Circuits 302 Circuits Precio: 27,05 € Agotado Precio: 27,05 € 304 Circuits 305 Circuits Precio: 34,26 € Precio: 39,67 € 303 Circuits Precio: 29,45 € Agotado 307 Circuits Precio: 46,28 € Microprocesadores, periféricos y técnicas: Short course 8051/8032 microcontrollers and assemble Microprocessor Data Book Data Book 3 - Peripherical Chips Precio: 29,45 € Agotado Precio: 29,45 € Precio: 27,05 € Data Book 4 Peripherical Chips Data Sheet Book 2 Precio: 27,05 € Agotado SMT Projects Precio: 27,05 € Agotado Precio: 29,45 € ST62 Microcontrollers PICs in practice Precio: 66,11 € Precio: 66,11 € SCSI The ins and outs The I2C Bus Precio: 66,11 € Precio: 66,11 € ✂ Build your own Electronic test instruments Precio: 42,07 € Agotado Build your own High-end Audio Equipment Precio: 39,67 € ✂ Construcción de equipos completos: CUPON DE PEDIDO Por favor envíen este pedido a: ADELTRONIK Apartado de Correos 35128 28080 Madrid ESPAÑA Nombre Domicilio Tel. (91) 327 37 97 C.P. Tel. Build your own Audio Valve Amplifiers Fax Fecha Por favor envíenme los siguientes libros. Cant. Título Precio/unid. IVA incl. Total € Sub-total Gastos envio Total 3,01 Precio: 39,67 € Forma de pago (vea la página contigua para más detalles) Nota: Los cheques serán en pesetas y conformados por una entidad bancaria. ❏ Cheque (nominativo a VIDELKIT, S.L.) ❏ Giro postal. Cuenta Postal (BBVA) Los precios y las descripciones están sujetas a cambio. La editorial se reserva el derecho de cambiar los precios sin notificación previa. Los precios y las descripciones aquí indicadas anulan las de los anteriores números de la revista. Nº 0182-4919-74-0202708815 ❏ Fecha de caducidad: Firma: Número de tarjeta: elektor 53 Operador Si para cambios de vías en modelismo y semáforos Ray King En muchos trazados de raíles de modelismo los dispositivos electromagnéticos activan, de forma instantánea, los cambiadores de vía y semáforos de una posición a otra con un cierto ruido seco. Equipados con un microcontrolador PIC y un pequeño servo, el circuito descrito en este artículo proporciona a estos dispositivos mecánicos un funcionamiento mucho más lento, suave, tranquilo y, por lo tanto, mucho más realista. lencioso +5V R4 K5 R5 D3 C3 10k 10k R3 10k R2 10k R1 10k K1 pos 100n 1N4148 NC 14 K2 4 MCLR RB0 RB1 17 18 CNTRL 1 2 3 IC1 RA0 RB2 RA1 RB3 RA2 RB4 RA3 RB5 PIC16F84 RA4 RB6 RB7 OSC2 K4 15 JP1 S2 6 7 V+ 8 K6 9 10 D2 11 16 NO 12 13 com 1N4148 V23057 12V OSC1 X1 RE1 5 T1 R6 S1 10k C4 C5 BC547 22p 8MHz 22p 030209 - 11 IC2 +5V 7805 D1 K3 1N4001 C1 C2 100μ 25V 10μ 16V Figura 1. En el corazón del circuito podemos encontrar el seguro microcontrolador PIC 16F84. Existe un gran número de constructores de trenes de modelismo que utilizan vías y puntos de cruce en propiedad, de manera que les permiten hacer sus propios diseños de vías. Cuando se añaden controles remotos para controlar los puntos de cruce y cambios de vías, a menudo nos encontramos con grandes diferencias con la realidad, así como movimientos no deseados en el mecanismo. En el mercado están disponibles unidades motorizadas que suelen ser caras y difíciles de instalar. Otra desventaja adicional de estas unidades comerciales es que la fuerza que utilizan es, a menudo, exagerada para la delicada escala de los cambios de vía, de manera que elektor se pueden producir fácilmente daños, y no precisamente daños de ajuste y de mantenimiento. En una vía diferente El diseño que proporcionamos utiliza servomecanismos estándar de radio control (R/C) para controlar los cambios de vía. Se utiliza un microcontrolador PIC para generar los pulsos PWM (modulación de ancho de pulso) necesarios, realizando el control de un sencillo conmutador “on/off”. El circuito incluye una prestación adicional que permite conmutar la polaridad del cambiador de vía, dependiendo de la posición del cambio de vía. En la terminología de modelismo de trenes, un cambiador es una pieza de hierro estriada que se coloca en los raíles donde las vías se cruzan. También existe una señal de retorno para indicar al operador el funcionamiento correcto de la unidad, de manera que se pueda mostrar, por ejemplo, en un diagrama de vías. El cambiador de vías se moverá lentamente y suavemente desde una posición a la otra, de manera que no se supere el recorrido de las vías ni se aplique demasiada fuerza que pueda dañar el cambiador. Si estamos interesados en realizar nuestro propio par de cambiadores, podemos visitar la página web que se lista en la parte final de este artículo. 55 K4 T+ K2 NO NC C4 C1 RE1 C5 IC1 JP1 pos R6 H4 IC2 T1 D2 Figura 2. Esquema de la serigrafía de implantación de componentes de la placa de circuito impreso diseñada para el control de los cambios de vías. La placa está disponible ya fabricada, a través de Servicio de Lectores. LISTA DE MATERIALES Resistencias: R1-R6 = 10k Condensadores : C1 = 100μF condensador electrolítico de 25 V radial C2 = condensador electrolítico de 16 V radial C3 = 100nF C4,C5 = 22pF Semiconductores: D1 = 1N4001 D2,D3 = 1N4148 T1 = BC547 IC1 = PIC16F84-10P, programado, con código de pedido 030209-41 IC2 = 7805 Varios: JP1 = Conector tipo “pinheader” de 2 terminales con puente K1 = Conector tipo “pinheader” de 3 terminales K2 = Bloque terminal para placa de circuito impreso, de tres terminales, con separación entre terminales de 5 mm K3-K6 = Bloque terminal para placa de circuito impreso, de dos terminales, con separación entre terminales de 5 mm S1,S2 = Conmutador de un solo contacto, como por ejemplo, tipo D6-R X1 = Cristal de cuarzo de 8 MHz RE1 = Relé para montaje en placa de circuito impreso, 12 V SPDT, por ejemplo, el V23057 de la casa Siemens PCB, Placa de Circuito Impreso, disponible a través de Servicio de Lectores Disco con los ficheros con código fuente de Proton PIC Basic Plus, con código de pedido 030209-11. También se pueden obtener a través de la descarga gratuita de nuestra página web 56 Programa del microcontrolador PIC. Número de fichero: 030209-11.zip Serigrafias de la placa de circuito impreso en formato PDF. Número de fichero: 030209-1.zip www.elektorelectronics.co.uk/dl/dl.htm. K5 D3 H3 C2 K6 R2 R1 R4 R3 X1 K3 R5 K1 C3 D1 ROTKELE )C( 1-902030 + S2 T 0 030209-1 H1 + T Descargas Gratuitas H2 S1 Como el control se realiza por medio de un sencillo conmutador “on/off” que utiliza niveles TTL estándar, es fácil crear una interfaz con la unidad, que permita controlarla por un sistema automático o un sistema controlado por ordenador (como el que se describe en otro artículo de este número). Entonces, ¿por qué utilizar un microcontrolador PIC cuando el diseño se podría realizar utilizando componentes más sencillos? El diseño que aquí presentamos utiliza muy pocos componentes, es fácil de configurar y podemos ajustar la velocidad de movimiento cambiando los parámetros en el código de programa. Descripción del circuito La Figura 1 muestra el esquema eléctrico del circuito de control suave para cambiadores de trenes de modelismo. Básicamente, el circuito está formado por un microcontrolador PIC situado entre los conectores de entrada y de salida. Las entradas incluyen la señal de control del cambio de vía, suministrada por la unidad de control maestra o por un sencillo conmutador situado en nuestro panel de control. Esta señal llegará a la entrada RA2 del PIC a través del conector K4. Las otras dos entradas se corresponden con los pulsadores, S1 y S2, cuyos valores se leen por medio de las líneas de entrada RA1 y RA0, respectivamente, del microcontrolador. Estas Direcciones de Interés en Internet Cómo construir un par de puntos de cambio y dibujos de un modelo: www.worldrailfans.org/Garden Railway/SLRPointBuilding.shtml señales se utilizan para configurar la acción del servomecanismo que se requiere, de manera que el cambiador de vías consiga alcanzar sin problemas sus dos posiciones más extremas. Si nos fijamos en la conectividad de salida, nos encontraremos con los pulsos de control para el servomecanismo que suministra el microcontrolador a través de su línea RA3, y que llega al servo por medio del conector K1 y/o K2. La línea del puerto RA4 se lee para detectar la presencia o ausencia del puente JP1, el cual realiza la selección entre dos configuraciones de memoria (veremos esto más detenidamente en otro apartado de este artículo). La línea del puerto RB4 proporciona información de control sobre el estado de los cambiadores, de manera que se puede utilizar como señal de realimentación para el sistema de control maestro. Así, la línea RB5 controla efectivamente un relé que se utiliza con el cambiador. Dependiendo de la estructura de su mecanismo, el cambiador utiliza un contacto "normalmente abierto” (n.o.) o uno “normalmente cerrado” (n.c.), o ambos. El circuito dispone de su propio regulador de tensión, IC2, de + 5 V. El rango de tensión de entrada no debería exceder los 12 VDC. El microcontrolador dispone de un complemento de cuarzo estándar para su circuito oscilador, que consiste en un cristal de cuarzo, X1, de 8 MHz barato y de dos tradicionales y pequeños condensadores de carga, referenciados como C4 y C5. elektor Si fuese necesario, habría que repetir este ajuste para cada nivel de la señal de control, hasta que el servo controle, de manera precisa y suave, el cambio de posición de un lado a otro. La configuración obtenida se almacena de manera automática en la memoria EEPROM interna del PIC. El puente JP1 permite que el microcontrolador pueda utilizar una localización de memoria alternativa, de manera que tengamos disponible el uso de dos configuraciones diferentes. Pero como hemos dicho, esto es una funcionalidad opcional. El programa La placa de circuito impreso La placa de circuito impreso diseñada para el control de cambio de vías ha sido creada con bastante espacio. Además, la placa contiene sólo componentes de tamaño estándar. En la Figura 2 podemos ver el plano de serigrafía de situación de componentes. Como conectores se han utilizado los bloques terminales de montaje en placa de circuito impreso, que disponen de un espaciamiento entre terminales de 5 mm, excepto para K1, que se trata de un conector tipo “pinheader”, de tres terminales, que se utiliza con los cables para servomecanismos ya hechos. Sin embargo, en todos aquellos casos donde no estemos seguros de cuáles son las conexiones que presenta el servomecanismo, recomendamos utilizar el bloque terminal K2 en su lugar. Una vez que hemos completado y verificado toda la placa, deberemos montarla en un lugar donde no se vea, lo cual significa que, en prácticamente la mayoría de los casos, el elektor lugar más adecuado será la cara inferior de la mesa donde montemos nuestro sistema de vías. Si no necesitamos ningún control de cambio de vías, podemos omitir el montaje de los componentes R6, T1, D2, K6 y Re1. Configuración La placa dispone de los pulsadores de calibración, S1 y S2. Si presionamos estos dos pulsadores de manera simultánea el servo se colocará en su posición central. En esta situación, el cambiador de vía se mantendrá en su posición central y unido al brazo de movimiento del servo. Una vez que hemos hecho esto, colocaremos la entrada de control (RA2) a un nivel lógico alto y pulsaremos S1 y S2 de manera individual para ajustar el extremo opuesto a las agujas del reloj del servo (CCW, es decir, del inglés counter clockwise). Seguidamente colocaremos la señal RA2 a nivel lógico bajo y de nuevo pulsaremos S1 y S2 de manera individual hasta alcanzar la posición CW (clockwise) más extrema deseada. El fichero con el código fuente del programa (.BAS) ha sido escrito en el lenguaje Proton PIC Basic Plus y no debe ser demasiado difícil poder convertirlo a otros compiladores de microcontroladores. El entorno de trabajo del lenguaje Proton también genera un fichero ensamblador que, junto con el listado en Basic, debe proporcionar suficientes indicios para adaptar el programa y el fichero ensamblador a nuestro ensamblador favorito para el microcontrolador PIC 16F84. El circuito también podría emplearse para funcionar con señales de semáforo. Ajustando los parámetros para la velocidad de trabajo y/o modificando el código de programa, sería incluso posible reproducir los movimientos de rebote del brazo del semáforo en sus movimientos de subida y bajada. (030209-1) Fotografía de localización, por cortesía de South Limburg Sream Railway Fundation (www.zlsm.nl). 57 Pocket Pong un juego antiguo con hardware moderno Los más jóvenes, suponiendo que lo reconozcan, lo clasificarán como un videojuego clásico, como Pacman y Pong. Aunque históricamente estos juegos son de vídeo, la idea de los mismos se remonta a 1950. En este artículo encontraremos una versión moderna (de ordenador) de un juego "prehistórico" que no ha perdido nada de su carácter compulsivo. 58 elektor +5V +5V 8x R3 10k K1 R5 10k 10k R4 C6 C7 100n 100n 11 R1 BC547B T2 T3 32 1k RB5/PGM IC1 4 1k 5 6 C2 P4 7 100n 10 RB2/INT2 RA4/T0CKI RB1/INT1 RB0/INT0 RE1/WR/AN6 RD7/PSP7 RE2/CS/AN7 RD6/PSP6 S2 RD5/PSP5 35 15 16 +5V 17 18 10Ω R6 R11 T7 34 33 30 R12 T8 R13 T9 29 R14 28 PIC16F452 100k 19 20 RD4/PSP4 RC0/T1OSO/T1CKI RC1/T1OSI/CCP2 RC7/RX/DT RC2/CCP1 RC6/TX/CK RC5/SDO RC3/SCK/SCL RD0/PSP0 RC4/SDI/SDA RD1/PSP1 RD3/PSP3 RD2/PSP2 OSC1 27 26 25 R15 56Ω K3 24 R7 1 R6 3 R5 5 R4 7 R3 9 R2 11 R1 13 R0 15 2 4 6 8 10 12 14 16 23 22 21 IC5 D89 1N4001 +5V 4805 OSC2 13 X1 12 R10 T6 36 56Ω 100k RA3/AN3/VREF+ 37 RE0/RD/AN5 9 S1 RB3/CCP2 RA5/AN4/SS/LVDIN 8 P1 RB4 RA2/AN2/VREF- R9 T5 38 56Ω R2 39 56Ω RB6/PGC RA1/AN1 56Ω RA0/AN0 56Ω 3 40 56Ω 2 100n RB7/PGD 56Ω P3 MCLR/VPP K2 P2 R8 T4 1 C1 14 31 C10 C9 470μ 25V 10μ 63V S3 C3 C4 22p 22p 4MHz +5V +5V R7 10 10Ω C8 1 100n 24 3 T1 0 DMUX 1 BC547B C5 C20 1 2 3 IC2 BZ1 4 100μ 10V 5 6 2 20D 0 7 3 G 21 22 0 15 8 9 10 3 74HC4514 23 2 11 12 13 14 15 11 4 9 5 10 6 8 7 7 8 I1 +VS O1 I2 O2 I3 O3 IC3 I4 O4 I5 O5 I6 ULN2803 O6 I7 O7 I8 O8 6 VEE 5 9 18 C0 17 C2 16 C1 15 C3 14 C4 13 C5 12 C6 11 C7 4 18 10 17 20 1 19 2 14 3 13 4 16 5 15 6 7 12 8 I1 +VS O1 I2 O2 I3 O3 IC4 O4 I4 I5 I6 ULN2803 O5 O6 I7 O7 I8 O8 18 C10 17 C11 16 C8 K4 C0 1 2 C1 C2 3 4 C3 C4 5 6 C5 C6 7 8 C7 C8 9 10 C9 C10 11 12 C11 C12 13 14 C13 C14 15 16 C15 15 C9 14 C14 13 C15 12 C12 11 C13 VEE 9 Se olvida fácilmente que los primeros juegos electrónicos se jugaban en una TV. De hecho, por aquel entonces la tecnología no estaba totalmente preparada para televisión. En 1951, el técnico de TV Ralph Baer pensó que sería agradable utilizar la televisión como pantalla para un juego electrónico. Su jefe, sin embargo, no vio la revolucionaria idea y la abandonó rápidamente. Años después, sin embargo, comenzó a emerger otra vez y en 1966 Baer comenzó a construir uno de sus primeros prototipos. Nació el vídeo juego. El juego cubierto por este artículo es el “ Pong” de Atari que es realmente un derivado de uno de los conceptos originales de Baer. Las primeras versiones para el uso doméstico fueron diseñadas alrededor de 1974. En comparación con otros fabricantes, Atari encontró la gallina de los huevos de oro: se diseñó elektor un ASIC (Application Specific Integrated Circuit -circuito integrado de aplicación específica-) para Pong. El chip permitió que los costes de producción fueran bajos mientras que la funcionalidad del juego (incluyendo un marcador digital en pantalla y los efectos sonoros) era excelente comparada con los productos de la competencia. La versión casera de Pong fue lanzada en 1976. Hoy, 28 años más tarde, haremos que otros vayan en el bastidor de Pong en electrónica. Esta vez, no utilizaremos un aparato de TV como “pantalla”, sino una matriz de LEDs. El circuito Al igual que hizo Atari hace muchos años, diseñaremos un chip adaptado únicamente al juego. Afortunadamente, esto no quiere decir que tengamos que diseñar completamente un nuevo circuito e integrarlo en un chip. Utilizamos simplemente un software corriente de microcontrolador que le diga exactamente qué tiene que hacer. Elegimos el PIC18F452, un MCU de 40-pines que contiene, entre otros, 32 kBytes de la memoria del programa y un convertidor A/D de 10-bits. Como puede ver en la Figura 1, el PIC no es el único IC (circuito integrado) en el circuito. IC2, un decodificador de 4 a 16 líneas , junto con IC3 e IC4 manejan el display de control. El display consta realmente de dos partes: los display de 7 segmentos LD1 y LD2, que muestran la cuenta y una matriz de LED (D1D88) que imita el campo de juego. Las raquetas o los palos virtuales se mueven en el lado izquierdo y derecho de corte, permitiendo que la bola sea despedida hacia adelante y hacia atrás. 59 Lista de componentes RD7 RD6 RD5 RD4 RD3 RD2 RD1 CD1 CD0 CD2 D32 D31 D30 D29 D28 D27 D26 D25 D24 D23 D22 D21 D20 D19 D18 D17 D16 D15 D14 D13 D12 D11 D10 D9 D8 D7 D6 D5 D4 D3 D2 D1 RD0 CD3 Resistencias: R1,R2 = 1 k R3-R6 = 10 k R7 = 10 Ω R8-R15 = 56 Ω P1,P2 = Potenciómetro 100 k RD7 K5 RD2 RD1 12 RD2 RD0 CD4 CD5 CD6 D64 D63 D62 D61 D60 D59 D58 D57 D56 D55 D54 D53 D52 D51 D50 D49 D48 D47 D46 D45 D44 D43 D42 16 RD0 D41 14 RD1 D40 rojos); caída de tensión a través de los drivers de Darlington en el ULN2803 (aproximadamente 1 V), caen cerca de 1,5 V a través de la resistencia. Si la corriente deseada es 10 mA: CD7 RD7 RD6 RD5 RD4 RD3 RD2 RD1 K6 CD8 CD0 1 2 CD1 CD2 3 4 CD3 CD4 5 6 CD5 CD6 7 8 CD7 CD8 9 10 CD9 CD10 11 12 CD11 CD12 13 14 CD13 CD14 15 16 CD15 RD1 RD2 RD3 RD4 RD5 RD6 RD7 10 a 9 b 7 c 5 d 4 e 2 f 1 g 6 dp RD1 RD2 RD3 RD4 RD5 RD6 RD7 3 CC 8 CD12 10 a 9 b 7 c 5 d 4 e 2 f 1 g 6 dp CC 3 D88 D87 D86 D85 D84 D83 D82 CC 8 CD13 Figura 1. En este juego, la pantalla está formada por un gran número de LEDs. El zumbador Bz1 proporciona los efectos sonoros. Se trata de un zumbador piezo-eléctrico (o activo) que es activado por el transistor T1. C5 y R7 producen el suficiente desacoplamiento de la tensión de alimentación de la fuente. La fuente de alimentación alrededor de IC5 es absolutamente estándar. El diodo D89 produce un grado de protección contra un adaptador polarizado accidentalmente a la inversa (con 9-12 VDC de salida). Con el PIC consumiendo apenas algunos miliamperios, es justo decir que el consumo de nuestro juego electrónico va en función de los LED. Sin embargo, gracias al esquema multiplexado usado aquí, el consumo medio de corriente permanece limitado a unos modestos 35 mA más o menos. Display Los LEDs del display de 7 segmentos y los de la matriz tienen sus cáto- 60 V=IxR 1,5 = 0,01 x R, 1,5/0,01 = 150 Ω. CD10 LD2 LTS4301E RD0 CC D81 D80 D79 D78 D77 D76 CD9 LD1 LTS4301E RD0 D75 D74 D73 D72 D71 D70 D69 D68 D67 D66 RD0 D65 15 RD3 RD4 D39 13 RD5 8 D38 11 6 10 RD3 Condensadores: C1,C2 = 100 nF C3,C4 = 22 pF D37 9 RD4 D36 7 RD5 RD6 D35 5 RD7 4 D34 3 RD6 2 D33 1 dos conectados vía ULN2803 al driver ICs (IC3 e IC4). Los ánodos están conectados a las líneas del puerto MCU, vía los transistores T2-T9. Podría parecer que los transistores son innecesarios, porque las líneas del puerto de PIC se especifican en 25 mA por cada uno, no obstante, esto puede que sea suficiente para los LED de alta eficiencia, pero no para los LEDs usuales, los cuales se iluminan débilmente con una corriente tan baja, reduciendo “la capacidad de juego”. Usando los valores de los componentes indicados (es decir, con los transistores y R8-R15 = 56 Ω) se obtiene una corriente del LED de cerca de 27 mA. A propósito, el valor de R8-R15 se puede cambiar sin problemas usando la Ley de Ohm. Asumiendo una tensión de fuente de 5 V y restando después lo siguiente: caída de colectoremisor (0,7 V); tensión en “on” del LED (aproximadamente 1,8 V para los LED Operación Para jugar se usan dos potenciómetros y dos interruptores. S1 sirve la bola, S3 es el selector de la velocidad. Cuando éste está cerrado, los movimientos de la bola son más rápidos y el juego más difícil. Hay una conexión para un tercer switch (S2) pero éste no se utiliza en el juego de Pong. P3 y P4 pueden ser un potenciómetro rotacional ordinario, pero los otros potenciómetros del juego, por supuesto, darán un control más realista de los palos en el campo. Estamos haciendo un joystick real. Los joysticks de PC “analógicos” generalmente contienen dos potenciómetros, uno para cada dirección (horizontal y vertical). En la mayoría de los casos se usan potenciómetros de 470 k de los cuales realmente se emplea la gama de la resistencia del 0 a 120 k. Para nuestro circuito, se requiere una gama de resistencia de 0 - 4,7 k, así que si está conectado un joystick, debe conectarse una resistencia en paralelo con la entrada (entre + 5 V y las patillas 2/3 del PIC) para cerciorarse de que se obtiene una resistencia mucho más baja. La resistencia equivalente de la red paralela se calcula así: 1/Req = 1/R1 + 1/R2 Así pues, si deseamos 4,7 k y el joystick R1 = 120 k entonces 1/R2 = 1/120k – 1/4.7k R2 = 4.89 k elektor D88 LD1 LD2 D83 D81 D82 D84 D85 D86 D87 D80 D79 D78 D77 D75 D73 D74 D76 D72 D71 D70 D69 D67 D65 D66 D68 D64 D59 D57 D58 D60 D61 D62 D63 D56 D51 D49 D50 D52 D53 D54 D55 D48 D43 D41 D42 D44 D45 D46 D47 D40 D39 D38 D37 D35 D33 D34 D36 D32 D27 D25 D26 D28 D29 D30 D31 D24 D23 D22 D21 D19 D17 D18 D20 D14 D13 D12 D11 D10 D9 D1 K5 K6 030320-1 S3 D89 R6 BZ1 T2 C9 T3 C5 + IC5 C10 X1 T5 T6 T7 T8 C7 C8 C6 T9 IC2 R8 R9 R10 R11 R12 R13 R14 R15 S2 K3 P1 K1 0 C3 C4 T4 R3 R4 R5 R7 IC1 T1 IC3 - IC4 + T elektor D15 D8 D7 D6 D5 D4 Construcción La placa de circuito impreso (Figura 2) consta de dos partes interconectadas con un trozo de cable plano. La construcción de la matriz de LEDs ocupará algún tiempo, aunque el trabajo en sí mismo es directo, debemos acentuar la importancia de comprobar la polaridad del LED, porque no se puede pensar en otra cosa más molesta que 88 LEDs incorrectamente colocados. Generalmente, el cátodo es la superficie más grande del LED, así como la patilla más corta. Generalmente... no siempre, así que debe cercionarse de la polaridad y en caso de duda usar un tester de conductancia. La orientación del display de 7 segmentos puede parecer incorrecta pero si sigue las indicaciones del recubrimiento del componente mostrado en la Figura 2 el circuito funcionará según lo esperado. La polaridad de los condensadores electrolíticos y los transistores en el circuito también merece una atención especial. Realizaremos asimismo una doble comprobación sobre la orientación del micro PIC antes de insertarlo en su zócalo, después de todo, el PIC es el componente más caro. La placa del circuito se montará lo mejor posible para que también se puedan colocar los interruptores, el enchufe del adaptador, los potenciómetros y los LEDs. Un bisel rojo encima de la separación de la matriz y los marcadores proporcionará el D16 Varios: K1 = P3 = potenciómetro lineal 4k7 mono (5k), y un conector SIL de 3 vías K2 = P4 = potenciómetro lineal 4k7 mono (5k), y un conector SIL de 3 vías K3, K4 = conector de caja de 16 pines D3 No tendremos problemas en la práctica si utilizamos una resistencia de 4,7 k. Los pines 1 y 3 en el joystick de 15 vías (un tipo sub-D) son para la dirección horizontal y los pines 1 y 6 para la dirección vertical. Finalmente, R1/C1 y R2/C2 suprimen el ruido generado por los potenciómetros mientras funcionan. K5, K6 = conector para cable plano de 16 vías para montaje en PCB S1 = pulsador, 1 contacto S2 = no colocado S3 = interruptor, on/off X1 = cristal de cuarzo 4 MHz BZ1 = zumbador piezoeléctrico de 5V (CC) D2 Semiconductores: D1-D88 = LED, rojo, alta eficiencia, 5 mm, e.g., HP HLMP-D101 (Farnell-Nr. 323-044) D89 = 1N4001 LD1, LD2 = LTS4301E (LiteOn) T1-T9 = BC547B IC1 = PIC18F452-I/P IC2 = 74HC4514 (74HCT4514 o 4514) IC3, IC4 = ULN2803 IC5 = 4805 T C5 = 100 μ/10 V radial C6,C7,C8 = 100 nF C9 = 10 μ/63 V radial C10 = 470 μ/25 V radial K4 P2 K2 R2 R1 C2 C1 S1 Figura 2. El PCB consiste en dos partes que se conectarán a través de un cable plano. toque final al juego. En caso de necesidad el juego puede funcionar con cuatro baterías del tipo AA. Sin embargo, en ese caso la corriente a través de los LED tiene que ser reducida, aumentando el valor de R8-R15. Esto es necesario para ahorrar energía de batería. Software Esto nos deja con el software quemado en el micro PIC, aquí, un PIC18F452. Puesto que estamos mirando un juego que no debe costar demasiado, buscamos un programador ultra-simple que permita que cualquier persona programe el chip usando su PC. El artículo “PICProg gratuito” en otro artículo de este número, nos servirá de muestra. Como de costumbre, el software del PIC para nuestro proyecto se puede obtener gratuitamente en nuestra página Web con el fichero 030320-11. El archivo del código ensamblador del PIC está bien comentado. (030320-1) 61 DIEZ AÑOS DESPUÉS DAB en Europa Hans Weber Operational Services Pre-Operational Services Los preparativos para lanzar al mercado la radio digital DAB comenzaron en Europa hace más de diez años. Aunque la preparación de la red de transmisores se realizó rápidamente en la mayoría de los países de Europa central y occidental, el inicio del mercado de los receptores fue muy modesto. En el Reino Unido, las ventas comenzaron a subir rápidamente a finales del 2002, recientemente ha habido un importante incremento que podría también pasar al continente. 62 elektor Realmente los estrategas y técnicos especialistas de la industria de la radiodifusión europea están de acuerdo en que los sistemas analógicos usados en las emisoras de FM (por no mencionar las emisoras de onda media) están técnicamente anticuados. La calidad de la recepción no es la ideal y las frecuencias disponibles son insuficientes para enfrentarse a la demanda. Sostienen que dentro de 15 años, las emisoras de radio se deberían convertir completamente de analógicas a digital. No obstante, la Radiodifusión Digital de Audio (DAB) inicialmente permanece atrancada en los bloques iniciales. Hasta hace poco, Alemania (de todos los países) era un claro ejemplo de una estrategia infructuosa. Por favor, espere... El descubrimiento del DAB fue anunciado cada dos años con maravillosa regularidad en la Exhibición de Emisoras de Berlín. Allí se presentaron planes para la construcción de la red de transmisores, y los suministradores de programas públicos y comerciales hicieron una declaración de intenciones para entrar en la era de la radiodifusión de la radio digital; además, varios fabricantes presentaron los prototipos y (después) los equipos se prepararon para la producción en serie, aunque a precios que todavía están alejados de la realidad comercial. Las asignaciones en frecuencia y la coordinación de ancho de banda fueron discutidas en los comités de administración organizados de forma federal. Se consultó a expertos de radiodifusión si se debían proporcionar a los oyentes programas en formato digital y analógico (‘simulcast’), o si eran necesarios nuevos programas para atraer a nuevos clientes. ¿La radiodifusión tradicional era suficiente como una aplicación, o el nuevo descubrimiento sólo vendría a complementar elektor el servicio de datos? En la cima de esta discusión imperaba una guerra de tipo ‘religioso’: ¿será DAB, DVB-T o incluso DRM? La decisión se anunció el año pasado: el sucesor digital de la radio VHF (FM) sólo podría ser el DAB. En un futuro próximo no es previsible esperar una red de transmisores DVB-T capaz de proporcionar cobertura nacional, porque no está claro quién podría pagarlo. Más aún, un multiplex DVB-T independiente para emisoras de radio no sería económicamente viable, excepto quizás en grandes áreas urbanas, lo cual significa que los programas de radio sólo servirían como ‘acompañamiento’ a los programas de TV y deberían tener un segundo puesto para ellos. En su formato actual, la tercera clase de radio digital terrestre, DRM, no es adecuada para un servicio de clientes regionales, sino sólo para clientes locales. La conclusión de una larga disputa era si se concebían DAB, DVB-T y DRM para tres áreas diferentes de aplicación, y aunque ellas pueden coexistir y complementarse unas a otras, no son intercambiables entre sí. Todas las personas involucradas están de acuerdo, al menos, en una cosa: la implantación del DAB sólo se puede llevar a cabo con una generosa ayuda estatal. En el área técnica, ya había una importante aportación de fondo estatal. La infraestructura para realizar la conversión a DAB está ahora en plena implantación en Alemania. En la actualidad al menos el 80% de los ciudadanos alemanes disfrutan de cobertura y a finales del año 2005 se pretende tener una completa cobertura del territorio. Ahora también hay un número suficiente de programas disponibles, aunque la cuestión de cuál es la estrategia correcta aún no ha recibido una respuesta unánime. Baviera, en particular, ha abrazado la estrategia de proporcionar nuevos programas Figura 1. que no se pueden recibir a través de VHF. La filosofía del Radiodifusión DAB simulcast todavía prevalece en otros muchos estados alemaInternacional. (source: World DAB Forum). nes, principalmente por razones de coste. 63 Figura 2. Cobertura DAB en el Reino Unido. Covertura de alta calidad existente. Covertura variable existente. Covertura de alta calidad a final de 2004. Covertura variable a final de 2004. Covertura de alta calidad en Noviembre de 2003. Covertura variable en Noviembre 2003. La BBC anticipa que cubrirá el 85% del territorio durante 2004. Figura 3. El sintonizador de alta calidad EDAB de Restek (www.restek.de). Figura 4. Actualmente están disponibles receptores DAB compactos para la banda L en Alemania por menos de 200 euros (www.thiecom.de). El receptor de la derecha también puede recibir emisoras VHF. 64 Los consumidores no han ganado al parecer mucho de todo esto: el número de receptores vendidos hasta ahora se estima en alrededor de 100.000. Eso es probablemente porque no hay un conocimiento suficiente del producto. La mayoría de los alemanes considera que el DAB es una marca de cerveza y la marca de fábrica que se usa actualmente es ‘Radio Digital’, lo cual no proporciona una clara diferencia con otros tipos de emisoras de radio digital. Como las organizaciones de mercado que se encuentran en casi todos los estados alemanes explican: ‘Primero invertimos mucho dinero en la tecnología y ahora tenemos que invertir mucho más en promoción’. El éxito todavía tardará un tiempo en alcanzarse. La radio de 99 libras esterlinas La situación en Gran Bretaña es bastante diferente. Aquí el mercado comenzó a moverse a finales del 2002. Se reconoció que la única forma de alcanzar una amplia penetración en el mercado de los receptores DAB era a través del precio. Lo mágico era considerar que el receptor estaba por debajo de las 100 libras. La iniciativa de producir una ‘radio de cocina de 99 libras’ no provenía de los fabricantes de emisoras, sino de los suministradores de programas. La BBC y las emisoras comerciales, en particular Digital One, mantenidos con los fondos de desarrollo, presentaron un integrado llamado ‘Chorus’. El coste de fabricación de este integrado era tan bajo que el precio del receptor podría bajar de esta mágica cantidad, aunque esto sólo era posible con subsidios adicionales. Poco antes de Navidad del 2002, se puso a la venta en tiendas especializadas el Pure Digital Evoke-1 con una amplia campaña publicitaria, y sus ventas comenzaron a las pocas horas. Esto fue la chispa que animó a otros fabricantes a entrar en el mercado con precios atractivos. Esto no sólo logró bajar los precios (en la actualidad, el receptor más barato cuesta alrededor de 70 libras esterlinas, lo que equivale a unos 105 euros), sino también aumentar el conocimiento y atrajo a otros clientes que incluso estaban dispuestos a pagar precios mayores. El número de receptores DAB vendidos en el Reino Unido alcanzó aproximadamente los 50.000 a mediados del año 2002 y en la actualidad llegan a más de medio millón de unidades, con un grado de cobertura originalmente comparable al de Alemania, aunque actualmente es un poco inferior. Por supuesto, la situación inicial en Gran Bretaña también era diferente. Las emisoras de onda media son mucho más comunes aquí que en cualquier otro sitio, así que las diferencias en la calidad de la recepción son más evidentes que con emisoras de FM. Además, los nuevos programas (que no se podían recibir usando receptores analógicos) se enfatizaron y fueron promovidos en los medios. Otra ventaja relativa con respecto a Alemania es que en el Reino Unido el DAB está disponible sólo en una banda de frecuencia (Band III, 174–240 MHz). En Alemania, DAB también se transmite en la banda L (1.452–1.492 MHz), con un desafortunado incremento de coste y reducción del rango del transmisor. Europa occidental: una situación diferente En Bélgica casi se ha completado la cobertura, la cual ha llegado hasta el 95% en toda Europa. En Francia, los focos estaban en las grandes áreas metropolitanas desde el principio. La programación DAB estaba disponible en Paris, Lyon, Marseille, Toulouse y Nantes, alcanzando casi del 25 al 30% de la población. elektor DAB por dentro Si buscamos componentes para receptores DAB, encontraremos rápidamente dos fabricantes ingleses: FrontierSilicon (www.frontiersilicon.com) y RadioScape (www.radioscape.com). La línea de productos FrontierSilicon está basada en el Chorus FS1010. Este circuito integrado lleva en su interior un procesador multimedia integrado con entrada ADC, procesador DSP, coprocesador DAB, memoria RAM y Caché en chip y varios periféricos en placa. El DAC no está integrado, por lo que los usuarios son libres de gastar tanto como quieran en este componente (o tan poco como deseen, si el coste es un objetivo). Para los fabricantes de equipos, FrontierSilicon también proporciona productos en forma de módulos completos que incluyen el frontal del sintonizador RF y varios componentes periféricos. Para producir un receptor completo, el fabricante sólo tiene que añadir esto a su propia interface de usuario (control de procesador, display y botones), la parte de audio (DAC, buffer, zócalos o Toslink, etc.) y una caja. RadioScape va un paso por delante con una pequeña placa del Módulo RS200, la cual utiliza el integrado DAB DRE200 de Texas Instruments e incorpora todas las funciones de una radio DAB/FM digital. Tal y como podemos ver en las ilustraciones, se puede hacer un completo sintonizador DAB/FM añadiendo simplemente unos pocos botones, un encoder rotatorio, un módulo LCD estándar (2 x 20 caracteres) y una fuente de alimentación. Con sus dimensiones compactas, el módulo RadioScape también puede usarse para construir radios de bolsillo. En los Países Bajos el funcionamiento del DAB comenzó el 27 de Febrero del 2004, después de cinco años de fase de prueba, lo que hizo que los Países Bajos fueran el último país comunitario en introducir un servicio DAB regular. Allí también hay disponibilidad en regiones con una alta densidad de población y, de acuerdo a las declaraciones oficiales, se cubre el 40% de la población actual. Todos estos países tienen en común que el número de receptores vendidos retrasó las inversiones técnicas en la red transmisora. Esto puede ser debido en parte al hecho de que al principio, los mercados relativamente pequeños no son especialmente atractivos para los grandes fabricantes. El mercado del receptor El mercado del usuario final está dividido en cuatro segmentos mayores. El primero de estos es el de la radio de automóviles, que en Alemania es considerado el segmento de mercado más importante. Los precios en este segmento son relativamente estables. El lider, Blaupunk, ofrece su modelo elektor Radio Scape RS200 Digital Audio FM/ DAB Input RF Downconvert Audio DAC DRE200 DSP Stereo Line Out Flash ROM 5V PSU Input General Purpose Input / Output Keypad / Display También plug-and-play: el módulo sintonizador RadioScape RS200 DAB/FM (www.radioscape.com). No es un secreto que la mayoría de los receptores DAB están montados usando estos módulos. Como ejemplo, las fotografías que muestran el interior del sintonizador DAB son las de un Minimódulo de la serie Audio Restek (www.restek.de). El módulo usado en el sintonizador DAB del Mini-módulo de la serie Audio Restek. Woodstock 53 (!) por 579 euros. El modelo Allixx de Grundig es algo menos caro, unos 399 euros. Los precios no varían mucho de un país a otro. Sólo en el Reino Unido está un poco por encima de la curva, con un modelo (Goodmans) disponible por menos de 200 libras. La situación con receptores móviles y portátiles es diferente. En el Reino Unido, el mercado está dominado por pequeños y no muy caros receptores que sólo pueden recibir la Banda III. Los receptores están disponibles a partir de unas 70 libras. Por el contrario, los precios en Alemania se mantienen a menos de unos 200 euros en la actualidad. Esta situación ha cambiado en la exposición CeBIT, donde TechniSat presentó un par de receptores de bajo precio: el DAB-Man por 169,99 euros y, para uso doméstico, el Digit-Radio DAB por 159,99 euros. Los visitantes del CeBIT también pudieron admirar el primer receptor DAM/DRM combinado, el Starwaves Prelude. Este receptor, que es fabricado por un pequeño fabricante en Hanover, no estará comercialmente disponible en el mercado hasta este año. El precio parece que en principio estará en la gama alta. 65 Las cosas son diferentes en USA: radio HD en lugar de DAB Additional Reference Subcarrier Lower Digital Sideband Upper Digital Sideband Main Main Primary Primary Additional Reference Subcarrier Analog FM Signal El artículo DAB de la revista del mes de abril de 1998 en Elektor reflejaba la oposición de la Asociación Nacional de emisoras (NAB) a la introducción del DAB y a favor de una banda de Radio Digital para operar en la banda de VHF en onda media. En ese momento, no había un método práctico para implementar tal soluLa señal de radio HD híbrida consta de una frecuencia modulada ción. La situación ha cambiado desde entonces: en la portadora principal (para programas de FM) y bandas bajo el nombre de ‘HD Radio’, iBiquity Digital laterales moduladas digitalmente para Radio HD. Corporation (www.ibiquity.com) desarrolló una técnica que permite transmitir los programas digitales en AM y FM utilizando los transmisores existentes. Esto se puede hacer junto con los programas convencionales de AM y FM, los cuales se pueden seguir radiando a las mismas frecuencias. Todo lo necesario para disfrutar de esta mejora de calidad de sonido y servicio de datos de radio HD es comprar un nuevo receptor con capacidad para Radio HD. La calidad CD se puede alcanzar con recepción FM, mientras que los programas AM tienen la misma calidad que las emisoras de FM. En ambos casos, la recepción está libre de ruido y se complementa con funciones de datos adicionales. La mayoría de los receptores de Radio HD también pueden recibir emisoras AM y FM normales. 10 frequency partitions -198,402 Hz # -546 10 frequency partitions -129,361 Hz # -356 0 Hz #0 129,361 Hz # 356 198,402 Hz # 546 Incluso antes de que un simple receptor esté comercialmente disponible, iBiquity ha concedido licencias para más de 280 emisoras de radio en 37 estados americanos. Los fabricantes del componente, tales como Alps (sintonizadores frontales, conversores A/D y D/A, y procesadores de señal) y Philips (Procesador de Radio SAF3350 HD) planean comenzar la producción en masa este año. En Alemania, los sintonizadores DAB para equipos hifi están todavía dominados por fabricantes de alta gama, tales como Restek (www.restek.de). Particularmente para los oyentes exigentes que puedan gastar más de 2.700 euros en un sintonizador DAB, mientras que en el Reino Unido un sintonizador DAB/FM de Acoustic Solutions para sistemas estéreo se puede obtener por menos de 115 libras. Las radios DAB basadas en ordenador, por el contrario, son escasas. El único modelo disponible en todos los países es el TerraTec DR Box 1 (con un coste de unos 300 euros). En Internet se pueden encontrar fácilmente sumarios de equipos y precios disponibles; algunas de las páginas son: www.digitalradio.de de Alemania y www.digitalradionow.com del Reino Unido. En cualquier caso, las esperanzas de Alemania están puestas en una ‘transición suave’ en lugar de un descubrimiento. La demanda de las emisoras de radio VHF simplemente se detendrá alrededor del 2015 (o incluso antes). (040101-1) Referencias: ‘Digital Audio Broadcasting (DAB)’ (I y II), Elektor Electronics, Marzo/Abril 1998. Páginas web: www.worlddab.org 66 ¿Cuál es el futuro? www.digitalradio.de En Alemania, DAB ha sido declarado en más de una ocasión como un sistema muerto. En la actualidad, la situación se puede considerar como más positiva. Parece que los precios pueden volver a caer de nuevo en un futuro cercano: la compañía Anglo-Israelí Sonarics está ofreciendo su módulo CSM DAB por unos 25 dólares americanos y el DSP Blackfin de Analog Devices, permite que el DAB funcione implementado por software y que esté disponible por 5 dólares en grandes cantidades. Al final, los grandes fabricantes (en particular Sony) están indicando su buena intención de entrar en el mercado. En paralelo con esto, se están incrementando los esfuerzos promocionales y la coordinación bajo la dirección de Iniciativa del Mercado de la Radio Digital (IMDR). www.radionumerique.be www.pure-digital.com www.drdb.org www.digitalradionow.com www.restek.de www.sonarics.com www.thiecom.de www.technisat.de www.radioscape.com www.frontier-silicon.com elektor es servicio lectores servicio lectores servicio lectores AGOSTO 2004 Los circuitos impresos, carátulas autoadhesivas, ROMs, PALs, GALs, microcontroladores y disquetes que aparecen en las páginas de ELEKTOR se encuentran a disposición de los lectores que lo requieran. Para solicitarlos es necesario utilizar el cupón de pedido que se encuentra en las páginas anexas. Este mismo cupón también puede utilizarse para efectuar pedidos de los libros de la colección de ELEKTOR (en versión original inglesa). - Los items marcados con un asterisco (*) tienen una vigencia limitada y su disponibilidad solo puede garantizarse durante un cierto periodo de tiempo. - Los items que no se encuentran en esta lista no están disponibles. - Los diseños de circuitos impresos se encuentran en las páginas centrales de la Revista. En ocasiones y por limitación de espacio no se garantiza la publicación de todos los circuitos. En estos casos los lectores interesados pueden solicitar los diseños, utilizando el mismo cupón de pedido y les serán enviados a su domicilio contra reembolso de 500 pts. (incluidos gastos de envio). - Los EPROMs, GALs, PALs, (E)PLDs, PICs y otros microcontroladores se suministrarán ya programados. Los precios y las descripciones de los diferentes productos estan sujetos a cambios. La editorial se reserva el derecho de modificar los precios sin necesidad de notificación previa. Los precios y las descripciones incluidas en la presente edición anulan los publicados en los anteriores números de la Revista. FORMA DE ENVIO Los pedidos serán enviados por correo a la dirección indicada en el cupón de las páginas anexas. Además los lectores pueden formular pedidos por teléfono llamando al número 91 327 37 97 de lunes a viernes en horario de 9,30 a 14 h y de 16 a 19 h. Fuera de este horario existe un contestador telefónico preparado para recoger las demandas. Los gastos de envio serán abonados por el comprador, tal como se indica en el cupón. Precio (€) 020336-1 020336-11 16,45 9,12 030320-11 9,12 030403-1 030403-11 030403-41 20,19 9,12 40,02 030209-11 030209-41 9,12 27,41 030385-1 29,00 020046-1 020046-2 020046-3 020046-11 020046-41 16,00 14,00 12,50 9,00 52,00 030371-11 030371-41 9,00 33,00 020148-1 020148-11 16,00 9,12 030402-1 030402-11 030402-41 20,00 9,12 38,50 020416-1 16,50 030365-1 030365-11 17,00 9,00 020434-1 020434-11 020434-41 14,40 9,00 27,41 020382-11 020382-41 9,00 16,24 030136-1 030136-11 030136-41 17,50 9,00 15,00 030096-11 030096-41 9,11 28,36 020163-11 020163-41 14,02 25,94 020435-1 16,00 030214-11 030214-41 9,12 11,49 030042-1 030042-11 030042-21 030042-31 17,45 9,12 18,66 11,38 030076-1 030076-11 14,44 9,12 030066-1 030066-11 19,03 31,74 030168-1 030168-11 030168-41 33,00 9,12 15,02 E291 AGOSTO 2004 Multi Programador: - PCB - Disco, firmware y código fuente CONDICIONES GENERALES Código Pocket Pong: - Disco, software PIC Router de vías: - PCB - Disco, software PC Y PIC - PIC16F877-20/P, programado Operador Silencioso: - Disco, PIC software - PIC16F84-10P, programado E290 JULIO 2004 Diseño de Nuestro Propio Circuito Impreso: - PCB Preamplificador de Gama Alta Controlado Digitalmente (2): - PCB placa principal - PCB placa de relés - PCB placa de alimentación - Disco - PIC18LF452-I/L, programado Medidor de Velocidad y Dirección del Viento: - Disco, software del proyecto - PIC16F871, programado E289 JUNIO 2004 FORMA DE PAGO Todos los pedidos deberán venir acompañados por el pago, que incluirá los gastos de envio, tal como se indicó anteriormente. El pago puede realizarse mediante cheque conformado de cualquier banco residente en territorio español, giro postal anticipado, tarjeta VISA (en este caso debe indicarse la fecha de caducidad, domicilio del propietario de la tarjeta y firma del mismo). Nunca se deberá enviar dinero en metálico con el pedido. Los cheques y los giros postales deben ser nominativos a la orden de VIDELEC S.L. Construya su Propio Receptor DRM: - PCB - Disco, proyecto ejemplo Caja De Música y el Sonido de Pandora: - PCB - Disco, código fuente y hex - PIC16F871/P, programado Explorador de VHF de Banda Baja: - PCB SUSCRIPCIONES A LA REVISTA Y EJEMPLARES ATRASADOS Las suscripciones o pedido de números atrasados, si se encuentran disponibles, se realizarán a LARPRESS, C/ La Forja, nº 27 - 28850 Torrejón de Ardoz (Madrid). Telf: 91 677 70 75, Fax: 91 676 76 65. E-mail: [email protected] Los precios de ejemplares atrasados son de 3,60 € más gastos de envio. COMPONENTES UTILIZADOS EN LOS PROYECTOS Todos los componentes utilizados en los proyectos ofrecidos en las páginas de la Revista se encuentran generalmente disponibles en cualquier establecimiento especializado o a través de los anunciantes de este ejemplar. Si existiera alguna dificultad especial con la obtención de alguna de las partes, se indicará la fuente de suministro en el mismo artículo. Lógicamente los proveedores indicados no son exclusivos y cualquier lector podrá optar por su suministrador habitual. CONDICIONES GENERALES DE VENTA Plazo de entrega: El plazo normal será de 2-3 semanas desde la recepción del pedido. No obstante no podemos garantizar el cumplimiento de este periodo para la totalidad de los pedidos. Devoluciones: Aquellos envios que se encuentren defectuosos o con la falta de alguno de los componentes podrán ser devueltos para su reposición, solicitando previamente nuestro consentimiento mediante llamada telefónica al número (91) 3273797 en horario de oficina. En este caso la persona que llame recibirá un número de devolución que deberá hacer constar al devolver el material en un lugar bien visible. En este caso correrá por nuestra cuenta el gasto de envio de la devolución, debiéndolo hacer así constar el remitente en su oficina postal. A continuación se le enviará nuevamente el pedido solicitado sin ningún gasto para el solicitante. En cualquiera de los casos anteriores, solo se admitirán las devoluciones en un plazo de tiempo de 14 dias contados a partir de la fecha de envio del pedido. Patentes: Algunos de los circuitos o proyectos publicados pueden estar protegidos mediante patente, tanto en la Revista como en los libros técnicos. La editorial LARPRESS no aceptará ninguna responsabilidad derivada de la utilización inadecuada de tales proyectos o circuitos para fines distintos de los meramente personales. Copyright: Todos los dibujos, fotografias, artículos, circuitos impresos, circuitos integrados programados, disquetes y cualquier otro tipo de software publicados en libros y revistas están protegidos por un Copyright y no pueden ser reproducidos o transmitidos, en parte o en su totalidad, en ninguna forma ni por ningún medio, incluyendo fotocopiado o grabación de datos, sin el permiso previo por escrito de Editorial LARPRESS. No obstante, los diseños de circuitos impresos si pueden ser utilizados para uso personal y privado, sin necesidad de obtener un permiso previo. Limitación de responsabilidad: Todos los materiales suministrados a los lectores cumplen la Normativa Internacional en cuanto a seguridad de componentes electrónicos y deberán ser utilizados y manipulados según las reglas universalmente aceptadas para este tipo de productos. Por tanto ni la editorial LARPRESS, ni la empresa suministradora de los materiales a los lectores se hacen responsables de ningún daño producido pos la inadecuada manipulación de los materiales enviados. E288 MAYO 2004 Construya su Propio Receptor DRM: - PCB - Disco, programa DRM.exe Cerradura Codificada: - PCB - Disco, código fuente y hex - PIC16F84A-4P, programado Multicanal Seguro para Modelos Controlados por Radio: - Disco, código fuente - AT89C52-24JI, programado Medidor de Frecuencia Multifunción: - PCB - Disco, software del proyecto - AT90S2313-10PC, programado E287 ABRIL 2004 Reloj Digital con Alarma: - Disco, PIC código fuente y hex - PIC16F84-04/P, programado iAccess: - Disco set, código fuente y control - AT89S8252-12PC, programado Sencillo Inversor de Tensión de 12V a 230V: - PCB Conmutador Controlado por Tacto: - Disco, PIC código fuente - PIC12C508A04/S08, programado E286 MARZO 2004 Placa flash 64-K 80C552: - PCB - Disco, misc. software del proyecto - 29F010, programado - GAL 16V8D15QP, programado Registrador Climático: - PCB - Disco, software Windows Codificador FMS para Simulador de Vuelo: CONSULTORIO TECNICO Existe un Consultorio técnico telefónico gratuito a disposición de todos los lectores. Este sevicio se presta todos los lunes y martes laborables en horario de 17 a 19 h. El número de teléfono para consultas es el 91 375 02 70. elektor - PCB - 87LPC767BN, programado Ruleta a Diodos Led: - PCB - Disco, código fuente y hex - 89C2051-12PC, programado 67 res servicio lectores servicio lectores servicio lector ✂ ✂ CUPON DE PEDIDO Por favor envíen este pedido a: ADELTRONIK Apartado de Correos 35128 28080 Madrid ESPAÑA Nombre Domicilio Tel. 91 327 37 97 C.P. Tel. Fax Fecha Por favor envíenme los siguientes materiales. Para circuitos impresos, carátulas, EPROMs, PALs, GALs, microcontroladores y disquetes indique el número de código y la descripción. Cant. Código Descripción Precio/unid. IVA incl. Los precios y las descripciones están sujetas a cambio. La editorial se reserva el derecho de cambiar los precios sin notificación previa. Los precios y las descripciones aquí indicadas anulan las de los anteriores números de la revista. Forma de pago (vea la página contigua para más detalles) Nota: Los cheques serán en euros y conformados por una entidad bancaria. ❏ Cheque (nominativo a VIDELKIT, S.L.) ❏ Giro postal. Cuenta Postal (BBVA) Total € Sub-total Gastos envio Total 3 Nº 0182-4919-74-0202708815 ❏ Fecha de caducidad: Firma: Número de tarjeta: Código Precio (€) E285 FEBRERO 2004 19,00 020350-11 020350-41 9,12 24,52 020127-11 9,12 020395-11 9,12 030204-1 16,24 Descubriendo el motor paso a paso (II): - Disco, código fuente Generador de Reloj Universal: - Disco, código fuente Contador de revoluciones para modelos de radio-control: 024111-1 024111-11 024111-41 33,00 9,00 16,00 020407-11 9,00 020374-1 020374-11 020374-41 14,00 9,00 25,00 Visualizador de Texto con Desplazamiento: - Disco, código fuente y hex Conversor USB analógico: - PCB - Disco, códigos hex y software Windows - PIC16C765, programado E283 DICIEMBRE 2003 68 020294-1 020294-11 020294-41 22,00 9,12 27,50 030060-2 14,00 010202-1 010202-11 010202-41 17,00 9,12 44,00 030060-91 68,00 020383-1 020383-2 020383-3 22,00 21,00 19,00 020403-11 9,46 034050-1 18,33 030030-1 030030-11 14,60 9,46 034039-1 16,79 Display de Cristal Líquido con Bus I2C: PICProg 2003: Central de Medida de Precisión (2): - Placa ensamblada y comprobada Preamplificador a válvulas (I): - PCB, placa amplificador - PCB, placa alimentación - PCB, placa I/O E281 OCTUBRE 2003 Mini Generador de Carta de Ajuste: - Disco, código fuente 020299-1 020299-2 020299-41 22,00 23,00 57,00 020290-1 17,00 - PCB Herramienta de Programación para el ATtiny 15: - PCB - Disco, software del proyecto Amplificador de coche en puente cuádruple: Detector de metal por inducción balanceada: - PCB - PCB - Disco, software del proyecto - PIC16F84A-20/P, programado Selector de Disco Duro: Generador de Señal de RF con DDS: - PCB, generador - PCB, control/alimentación - AT90S8515 8PC, programado 9,12 28,37 25,70 Interruptor remoto mediante teléfono DTMF: - PCB - Disco, software Windows - PIC16F874-20/P, programado E284 ENERO 2004 - PCB - Disco, código fuente y hex - 89C2051-12PC, programado - Disco, código fuente y hex - AT90S8515-8PC, programado - AT90S1200-12PC, programado - PCB Enlace RS232 sin hilos: - PCB 020295-11 020295-41 020295-42 Generador de imágenes ATV: 034044-1 Cronómetro de Proyectos: - Disco, códigos fuente y objeto - PIC16F84-10P, programado Precio (€) E282 NOVIEMBRE 2003 Receptor de Control Remoto en FM: - PCB Código - PCB elektor es servicio lectores servicio lectores servicio lectore Código Precio (€) E280 SEPTIEMBRE 2003 020293-11 020293-41 9,29 14,33 034036-1 17,50 020365-11 10,00 020337-11 020337-41 9,46 12,09 Mini display para texto en movimiento: - Disco, código fuente E279 AGOSTO 2003 030026-1 030026-2 030026-11 030026-41 15,40 16,70 9,46 29,43 Agenda electrónica de bolsillo: - Disco, software PC y controlador - AT90S2313-10PCprogramado 020115-11 020115-41 9,46 24,89 Bus DCI: 010103-1 010103-11 010103-21 010103-22 010103-31 25,55 9,46 19,36 19,36 9,30 020296-11 020296-41 9,40 26,00 012013-11 012013-21 9,40 28,00 020071-1 020071-2 28,40 18,80 Amplificador Final a Válvulas (2): E277 JUNIO 2003 010131-1 010131-4 25,34 44,70 010059-1 010059-11 36,00 9,00 020054-4 21,00 Simple chip para Control de Tono: - PCB 12,00 10,00 010113-1 010113-2 010113-11 010113-41 17,00 25,00 10,00 43,00 020307-11 10,00 020106-1 020106-11 020106-41 25,00 10,00 13,00 020178-1 22,00 024066-1 024066-11 024066-31 18,50 10,00 10,00 012019-11 012019-41 10,00 40,00 020189-1 18,50 012016-1 012016-11 012016-41 20,00 10,00 21,00 020138-1 18,50 024051-1 16,24 020026-1 020026-11 020026-41 26,00 10,00 40,00 020122-11 39,25 000191-1 000191-11 000191-41 000191-42 20,00 10,00 40,00 29,35 010097-1 28,47 012022-1 32,00 024107-11 024107-41 9,78 16,00 020002-1 9,13 020102-1 24,00 020008-1 18,00 Codec de audio USB con S/PDIF: - PCB E272 ENERO 2003 Emulador de EPROM: - PCB - Disco, listado JEDEC GAL - GAL 16V89, programado - Disco, software del proyecto - PIC12C672-04/SM, programado Comprobador de Nivel de Audio: Monitorizador telefónico de bebé: - PCB - Disco, código fuente y hex - AT90S1313-10PC, programado E271 DICIEMBRE 2002 Medidor de Nivel de Presión Sonora: 020181-1 27,00 Alarma de Robo para Moto: 020170-11 020170-41 10,00 23,50 020085-1 020085-11 020085-41 27,00 10,00 20,60 E270 NOVIEMBRE 2002 010134-1 010134-2 010134-11 010134-41 17,00 22,00 10,00 15,00 Comprobador de condensadores ESR: 020032-1 020032-11 020032-41 32,00 10,00 31,28 - PCB Vatímetro Digital de RF: - PCB - Disco, código fuente - PIC16F876-04/SP - PCB - PCB - Disco, código fuente - PIC16F84-04/P - PIC16F84-04/P Receptor de la banda de 20 m: - PCB - PCB Microprogramación para emulador EPROM: - Disco, código hex - AT89C2051-12P programado Comprobador de continuidad: Analizador Lógico 20/40 MHz: - PCB Placa controladora de alta velocidad (II): - PCB Interface paralela JTAG: Sistema de Altavoces Activo (II): elektor - PCB - Disco, software del proyecto - AT89C2051-1, programado 27,36 10,00 E275 ABRIL 2003 - PCB - Disco, programas BASCOM-51 020351-1 020351-11 Desplazamiento de luces bicolor: - PCB - Disco, programa demostración - AT90S8515-8PC, programado 020133-1 020133-11 Programador AT90S8535: Sustitución del SAA3049: - PCB, controlador - PCB, placa LED - Disco, software del proyecto - AT89C2051-12PC, programado 25,00 Dispositivo de bloqueo programable para números de teléfono: 19,00 10,00 32,00 Temporizador Inteligente para Ventilador: - PCB - Disco, código fuente y hex - 87LPC764BN, programado 020157-1 Ampliación de líneas y ADC: 020126-1 020126-11 020126-41 Caja de conmutación con efectos de guitarra: - Disco, software del proyecto - MSP430F1121, programado - PCB, conversor - PCB, terminal - Disco, software del proyecto and código fuente - AT90S8515-8PC, programado 19,40 Sistema de Desarrollo AVRee: - PCB - PCB - Disco, código fuente de la demo 020054-3 Unidad de conmutación complementaria para modelismo R/C: - PCB - Disco, programas ejemplo 27,00 - PCB - PCB Fuente de Alimentación Conmutada de 17 V/10 A: - PCB - Disco, código fuente y hex - PIC16C712-041/SO, programado 020110-1 Adaptador para Diagnóstico de Vehículo: E276 MAYO 2003 - PCB 23,00 11,14 70,24 E273 FEBRERO 2003 - PCB Pico PLC: - PCB - Disco, programa de test 020005-1 020005-11 020005-41 Linterna a LED: Controlador de luces de discoteca de 8 canales: - PCB - 87C750 or 87C71, programado 16,00 - PCB Interface CompactFlash para sistemas de microcontrolador: Grabador de audio USB: - Placa amplificador (1 canal) - Placa fuente alimentación 020054-1 Ahuyentador de roedores: 16,79 9,46 Temporizador descendente: - Disco, código EPROM - EPROM 27C512, programado - PCB - Disco, código fuente - AT90S4433-8PC, programado 020114-1 020114-11 E278 JULIO 2003 - Disco, código fuente y hex - AT90S1200, programado 38,00 10,00 32,00 - PCB 9,46 24,40 Tarjeta de desarrollo XA Universal (II): - PCB - Disco, código GAL, EPROM, XADEV - EPROM IC8, 27C256-90, programado - EPROM IC9, 27C256-90, programado - GAL 16V8, programado 020036-1 020036-11 020036-41 Sistema de altavoces activo (I): 020308-11 020308-41 Control de luz nocturna: - Disco, código fuente y hex - AT90S2313-10PC, programado - PCB - Disco, software del proyecto - PIC16F84A-04/P, programado Conectores de red controlados SMS: Controlador LCD de bajo coste (ii): - PCB - Disco, software del proyecto 15,00 10,00 32,00 Lanzador de Dado RPG Electrónico: Tenis TV con AVR: - PCB principal - PCB pulsadores - Disco, código fuente AVR - AT908515, programado 020144-1 020144-11 020144-41 E274 MARZO 2003 Control Remoto de Luz con Regulador de Intensidad: - Disco, código fuente y hex - AT89C2051-12, programado - PCB - Disco, código fuente y hex - PIC16F84A-20/P, programado Reloj de arena electrónico: Programador AT90S2313: - PCB Precio (€) Medidor de Capacidad con Escala Automática: Adición de un destello: - Disco, código fuente y hex - PIC12C509A-04/SM, programado Código 020054-2 16,46 - PCB 69 Route Ray King Un ‘operador suave’ utiliza servos para el control de modelos y excitar las vías muertas de un tren de modelismo ferroviario. Una de sus ventajas es que se puede activar a través de un sencillo cable, lo que lo hace ideal para controlarlo mediante un ordenador, tal y como describimos aquí. El Router de vías es una combinación hardware/software capaz de controlar hasta 127 vías. er de vías Rutador para trenes de modelismo con un PC El hardware del router de vías contiene una placa router master capaz de controlar directamente hasta 15 dispositivos y una placa esclava conectada a través de un cable plano y que añade el control de otras 16 vías. En la Figura 1 podemos ver el diagrama de bloques completo del sistema. Los circuitos master y esclavo utilizan la misma placa de circuito impreso para reflejar la función deseada. Los routers esclavos son opcionales (si estamos satisfechos con sólo 15 vías y/o semáforos nos bastará con la placa master). Un circuito de doble propósito... El esquema del circuito se puede ver en la Figura 2 y nos muestra además del circuito master el circuito esclavo. Las líneas a trazos y las conexiones se usan para indicar la diferencia entre los dos circuitos, los cuales se pueden construir en la misma placa. Eléctricamente la diferencia entre los dos circuitos está en la presencia o ausencia de jumpers y otras partes de circuito. El MAX232, un doble conversor de nivel RS232/TTL, por ejemplo, sólo es necesario para la función master, la cual (como ya supondrá) necesita la conexión a un PC en el que se esté ejecutando el software con el programa de Control del Router de vías (lo veremos un poco más adelante). El puerto RS232 del PC está conectado a la placa master del Router de vías a través de un conector sub-D marcado como K17. Sólo se utiliza Tx/Rx para el tráfico, sin protocolo de intercambio. En el corazón de la placa master y de la placa esclava tenemos un microcontrolador PIC16F877. Aunque el micro está cargado con el único y el elektor mismo software para la función master o esclavo, realmente selecciona entre dos códigos diferentes según el nivel lógico que esté definido en la línea del puerto RC5 por medio del jumper JP1. El PIC 16F877 tiene una frecuencia de reloj de 8 MHz por medio de un cristal de cuarzo X1 y sus condensadores de carga C1 y C2. Las placas master y esclavo del router requieren una fuente de alimentación de 8 V a 15 Vdc, que se puede suministrar por medio de un pequeño adaptador o desde la salida DC de un controlador de velocidad de trenes de modelismo. Operación master El micro PIC monitoriza de forma constante la información de la entrada serie, determinando si el dispositivo especificado en el comando está comprendido en las primeras 15 vías. Si es así, cambia el estado del control de vía (a través de K2 - K16). Si no es así, pasa la información hacia el buffer IC3 y desde aquí al conector K18 para comprobar las unidades esclavas. Cada salida del conector (K1 – K16) en la placa del router dispone de una tensión de alimentación no regulada (V+) y los terminales de control que requieren los circuitos del servo de control para el ‘Operador suave’. Observe que la salida #1 (K1) no se usa para la configuración master. Está pensada para dar otras facilidades en una etapa posterior. Operación esclava La operación de la placa esclava es idéntica a la de la master pero más sencilla, porque no dispone de la interface serie Rx/Tx con el PC. La única dirección de cada placa esclava está determinada por las configuraciones del interruptor DIP S1. La configuración de la dirección 001, por ejemplo, permite a la placa esclava operar desde las vías 16 a 31, donde el código 001 es RE2 = 0; RE1 = 0 7 RE0 = 1 en el PIC. … y una placa de circuito de doble propósito Como ya indicamos en el esquema del circuito, la placa del circuito diseñado para el sistema de Router de vías puede actuar como un master o un esclavo, dependiendo de la popularidad. Las dos diferentes placas con los componentes se pueden ver en la Figura 3a (Master) y 3b (Esclava). Estudie con cuidado las listas de componentes de cada placa para evitar encontrar problemas. Si es necesario, echaremos un vistazo al esquema del circuito. Todos los componentes de las dos placas tienen un tamaño regular, por lo que su montaje no debe de suponer ningún tipo de problema si ponemos atención a la colocación de los componentes con polaridad (circuitos integrados, transistores, condensadores electrolíticos). Nosotros recomendamos el uso de un zócalo de buena calidad para el PIC y la mayoría de los componentes caros del circuito. El software del PIC Podemos ver brevemente la ejecución del software en el PIC usado en este proyecto. Para todos aquellos programadores que quieran saber un poco cómo está hecho pueden descargar el código fuente de nuestra página web 71 PC Alimentación C.C. Rotador MASTER 15x max. Desvío serial lead Desvío Desvío ribbon connector Alimentación C.C. Rotador ESCLAVO 16x max. Desvío Desvío Desvío hasta 7 ESCLAVOS Alimentación C.C. Rotador SLAVE 16x max. Desvío Desvío Desvío 030403 - 11 Figura 1. Un sistema completo se debería configurar como éste. Las cajas marcadas como ‘turnout’ representan una unidad de ‘Operador Suave’. con la referencia 030403-11. Después de descargado, puede compilarlo y programar su PIC 16F877. Alternativamente usaremos el código hex directamente. Para todos aquellos que quieran tener el propio PIC programado podemos recurrir a nuestro Servicio de Lectores bajo el código 030403-41. Router de vías para el PC En la Figura 4 se muestra una pantalla del software del router de vía ejecutado en un PC. Cualquier número de vía diseñado se puede almacenar en el PC y cargar cuando el programa está en mar- cha, o en cualquier momento durante una sesión. El software escrito ofrece la facilidad para diseñar y alterar el dibujo de las vías antes de salvarlas a disco. La velocidad de transmisión al router master es de 9.600 bits/s. El software del PC está escrito en Visual Basic 6 (VB6). El código fuente (.VBP y componentes) además de la versión ejecutable están incluidos en el paquete de software del proyecto, ref. 030403-11. Ejecute el fichero railrout.exe y el programa será instalado en nuestro ordenador. Las últimas versiones y hardware añadido pueden encontrarse en la página web de Ray King (el diseñador del mismo). Diseño de un tramo de vía... Oprimiendo el botón ‘Change Layout Design’ aparecerá la pantalla de diseño. Pulsaremos en cualquier zona cuadrada LISTADO DE COMPONENTES Router Master Resistencias: R1 = 4k7 R2,R3,R4 = 10k R5 = 47k Condensadores: C1,C2 = 22pF C3-C7,C9 = 10μF 25V radial C8,C11,C12 = 100nF C10 = 1μF 16V radial Semiconductores: IC1 = PIC16F877-20/P, programado, código de pedido 030403-41 IC2 = MAX232 IC3* = 74HCT241 IC4 = 7805 Varios: JP1,JP2 = jumper K2-K16 = conector SIL de 3 vías 72 K17 = conector sub-D 9 (hembra) pines acodados, montaje PCB K18* = conector de caja de 10 pines K19 = regleta de 2 vías para PCB, separación de pines 5 mm X1 = cristal de cuarzo de 8 MHz PCB, código de pedido 030403-1 (ver página del Servicio de Lectores) Disco, todo el software del proyecto (PIC & PC), código de pedido 030403-11 o descarga gratuita * sólo se requiere cuando se conecta un Router Esclavo Router Esclavo Resistencias: R2,R3 = 10k R5-R8 = 47k Condensadores: C1,C2 = 22pF C9 = 10μF 25V radial C12 = 100nF C10 = 1μF 16V radial Semiconductores: T1 = BC550 IC1 = PIC16F877-20/P, programado, código de pedido 030403-41 IC4 = 7805 Varios: K1-K16 = conector SIL de 3 vías K18 = conector de caja de 10 pines K19 = regleta de 2 vías para PCB, separación de pines 5 mm S1 = Interruptores DIP de 3 ó 4 vías X1 = cristal de cuarzo de 8 MHz PCB, código de pedido 030403-1 (ver página del Servicio de Lectores) elektor +5V +5V 20 IC3 C11 IC3 19 EN 1 EN V+ +5V 100n 10 V+ SLAVE ONLY K1 MASTER ONLY K9 K18 R1 R2 2 S0 3 17 S7 3 16 4 S1 4 5 15 S6 5 14 6 S2 6 7 13 S5 7 12 8 S3 S0 2 8 9 11 S4 S1 3 S2 4 S3 5 SLAVE: CONNECT DASHED LINES S4 6 +5V S5 7 R3 S6 15 S7 16 9 10k 18 R4 23 10k JP1 24 25 26 T1 SLAVE ONLY MCLR 8 9 47k 10 K3 RB7 RA0/AN0 RA1/AN1 RB6 RA2/AN2 RB5 RA3/AN3 RB4 RA4/T0CK RB3 RB2 RA5/AN4 RC0 INT/RB0 40 O16 39 O15 38 O14 37 O13 36 O12 35 O11 34 O10 33 O9 RC2 RC3 O3 O4 K5 RC5 RD6 TX/RC6 RD5 RX/RC7 RD4 RE0/AN5 RD2 RE1/AN6 RD1 RE2/AN7 RD0 30 O8 29 O7 28 O6 27 O5 22 O4 21 O3 20 O2 19 O1 X1 O6 O7 O15 K8 C1– 13 3 7 8 R2OUT R2IN T1OUT T1IN R1OUT R1IN T2OUT T2IN C2+ C8 SLAVE ONLY C4 3 10μ 25V 9 V+ R8 1 22p R6 C1+ IC2 7 IC4 12 10 4 S1 C5 C2– 100n 5 8 7 6 5 SUB D9 1 2 3 4 C9 C10 10μ 25V 1μ 16V 10μ 25V V6 C7 +5V 7805 K19 11 MAX232 15 K16 O16 +5V C2 8MHz 47k 1 14 K15 14 31 47k V+ 10μ 25V O14 K7 R7 22p 16 2 K14 47k C1 2 K17 5 O13 O8 25V 8 K13 K6 C6 10μ C3 O12 OSC1 OSC2 6 K12 O5 RD7 MASTER ONLY 9 O11 K4 PIC16F877 RC4 12 13 +5V K11 RC1 BC550 4 O10 IC1 RD3 OPEN = SLAVE SHORT = MASTER R5 K10 O2 1 17 OPEN = SLAVE SHORT = MASTER JP2 K2 32 RB1 +5V O9 100n 11 74HCT241 IC3: MASTER: USE IC3 10 C12 10k 18 2 4k7 1 O1 030403 - 12 10μ 25V K1 K9 K10 K3 K11 K12 K5 K13 K14 K7 K15 K16 0 + H2 K9 K10 K3 K11 K12 K5 K13 K14 K7 K15 K16 0 1-304030 C9 K2 K4 K8 K6 R3 X1 C1 030403-1 C12 C11 C1 R3 IC3 1 R4 H4 T1 H4 H1 H1 (C) ELEKTOR K17 K18 K18 JP2 C7 JP1 C5 C4 C6 IC2 C8 R5 C3 C2 X1 R1 C2 IC1 R2 C10 K4 K6 K8 K2 030403-1 C12 IC4 C9 C10 IC4 R2 IC1 R6..R8 4 S1 1-304030 K19 K19 H2 H3 C11 H3 + Figura 2. Esquema del circuito combinado para las configuraciones de router Master y Esclavo. (C) ELEKTOR Figura 3. Componentes de la placa Master (izquierda) y de la placa Esclava (derecha) sobre los respectivos circuitos impresos. elektor 73 Descargas gratuitas Software para PC y microcontrolador. Fichero número: 030403-11.zip PCB layout en formato PDF. Fichero número: 030403-1.zip www.elektor-electronics.co.uk/dl/dl.htm existe una opción para cargar otra vía, habilitando el mismo software para usar un número de vías diferentes. Figura 4. Software del Router de vías para PC en marcha. …y poner un controlador de tren de la misma y después el símbolo requerido poniéndolo en este cuadrado. Continuaremos añadiendo símbolos hasta que completemos el dibujo de la vía. Nos aseguraremos que todas las vías muertas y vías de entrada y salida acaben con el símbolo ‘end’. Cuando lo hagamos, pulsaremos en ‘Save Design and Exit’ y escribiremos el nombre de la vía cuando salga el cursor parpadeando. Cuando la hayamos salvado, el programa recordará los detalles de todas las vías y asignará un hardware ‘puerto’ a cada una. Para comprobar la asignación, pulsaremos en ‘Check Port Assignment’ para producir una lista del número de vía en el diagrama y su puerto de hardware asociado. Este puerto hardware (por ejemplo, K2- K16 en la placa master, o K1 – K16 en una placa esclava) deberían ser cableados al control del ‘Operador suave’ para esa vía particular. Pulsaremos la sección de vía que intentemos rutar primero en el principio y después pulsamos en la sección de pista donde queramos acabar. Pulse en ‘Plot’ y el programa nos ayudará a encontrar el camino desde el principio al fin. Si lo consigue, la ruta se resaltará en amarillo. Si no, se hará visible un mensaje con ‘ruta no encontrada’. Si la ruta existe, pero creemos que existe un mejor camino simplemente pulse en el botón ‘Plot’ de nuevo hasta que seleccionemos la ruta preferida. La ruta en amarillo se puede manejar directamente utilizando el botón apropiado, alternativamente puede almacenarse de nuevo una de las tres rutas coloreadas y operar a cualquier tiempo. Hasta tres rutas diferentes se pueden almacenar de esta manera. Para evitar comenzar o acabar nuestra ruta desde un cruce, vía muerta o señal de final puede hacer que el software produzca resultados inusuales, mensajes de normalmente falso ‘No Route’, lo cual, a pesar de lo que podamos pensar, no es tan malo como el de ‘No Train Services Today’ (Hoy no hay servicio de trenes). En la instalación es posible que el mecanismo de cambio de vía trabaje en sentido opuesto al software, eso es, si se selecciona ‘adelante’ el cambio se mueve al revés. Esto se puede solucionar usando el botón ‘Change Turnout Sense’. Esta opción para un número de puerto dado invertirá el sentido (polaridad digital) del mismo. Esta información se visualiza en el puerto asignado en la pantalla. …cambiando la vía... Pulsaremos en ‘Change Layout Design’ y la vía actual se visualizará. Podemos añadir o borrar símbolos para cambiar tantas veces como sea necesario. Después, salvaremos el diseño modificado pulsando en el botón ‘Save and Exit Design’. Alternativamente, podemos abandonar los cambios pulsando en ‘Exit Design without Saving’. También (030309-1) Pagina web www.king.ray.btinternet.co.uk/ index.htm Figura 5. Router Master acoplado a un Router Esclavo por un cable plano. 74 La fotografía es cortesía de la Fundación South Limburg Steam Railway (www.zlsm.nl) elektor ¡Es fácil y divertido! S SERIE MX ¿Aprender tecnología? atractiva, resultado: se aprende sin darse cuenta para todos los niveles economicos para todos los niveles educativos MX - 901 LA RADIO DE CRISTAL I C S C I R C U I T Enseñanza tecnica y rigurosa, pero entretenida y E C T R O N MX - 902 MINI LABORATORIO ELECTRICO 4 EN 1 E L MX - 906 ENTRENADOR 130 PRACTICAS MX - 903 ENTRENADOR 30 EN 1 c e b e k . c tel.; 93 331 33 42 - fax: 93 432 29 95 o m
 0
0
Anuncio
Documentos relacionados

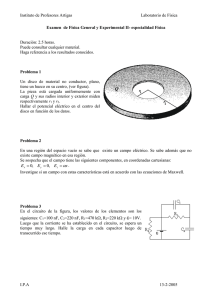




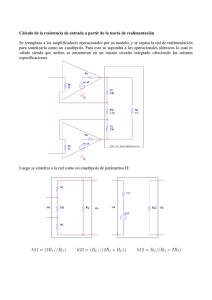
Descargar
Anuncio
Añadir este documento a la recogida (s)
Puede agregar este documento a su colección de estudio (s)
Iniciar sesión Disponible sólo para usuarios autorizadosAñadir a este documento guardado
Puede agregar este documento a su lista guardada
Iniciar sesión Disponible sólo para usuarios autorizados