III Concurso de Robótica SEDI UIS 2012
Anuncio

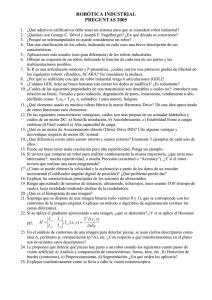
Grupo de Electrónica & Robótica Aplicada Facultad Ingenierías Físico-Mecánicas Ciudad Universitaria, carrera 27 calle 9, edificio Físico-mecánicas, oficina 150 PBX: (7) 6344000 Ext 1305 Bucaramanga Colombia E-mail: [email protected] Sitio web: www.grupoera.com.co III Concurso de Robótica SEDI UIS 2012 Información General La Facultad de Ingenierías físico-mecánicas de la Universidad Industrial de Santander en el marco del primer congreso nacional de diseño e ingenierías físico-mecánicas UIS 2012 de manera conjunta con el Grupo de Electrónica & Robótica Aplicada (Grupo ERA) realizará los días 15 y 16 de noviembre de 2012 en el edificio de Laboratorios Pesados (LP) el III Concurso de Robótica SEDI UIS 2012. Para esta versión se tendrá tres (3) categorías; seguidor de línea, donde dos (2) robots se enfrentarán en una competencia tipo NASCAR y quien posea mayor destreza, velocidad y control logrará avanzar. La segunda categoría comprende batallas de Sumo 3kg, por último se tiene la categoría de laberinto interactivo, donde a medida que el robot avanza en el recorrido la pista cambia de acuerdo a como se mueve el robot dentro de ella. CARRERA 27 - CALLE 9. CIUDAD UNIVERSITARIA - APDO. AÉREO 678 – BUCARAMANGA - COLOMBIA TEL. 6344000 - Ext.(s) 2472 - 1306 TELEFAX (97) 6346140 WEB: www.uis.edu.co/unidades académicas/facultades/facultad de Ingenierías Fisicomecanicas E-mail: [email protected] Descripción de las categorías Laberinto Interactivo El laberinto interactivo consiste en un recorrido guiado por una línea de referencia de color negro sobre una superficie blanca, el laberinto posee diferentes niveles (pisos o plantas) a los cuales podrá acceder por distintas rutas, adicionalmente cuenta con diferentes rampas de acceso rectas y curvas tipo caracol; una de las rampas de acceso que permite el cambio entre el primer y segundo piso es de tipo móvil, es decir en algún momento permitirá el acceso y en otro lo bloqueará; en el primer piso existe otro sistema de cambio de rutas (intercambiador circular), el cual permitirá seleccionar 4 rutas diferentes dentro de mismo piso, el robot modificará la posición de estas a medida que navegue dentro del laberinto, sabiendo de antemano la posición inicial de estas y los puntos sobre los cuales deberá acceder el móvil para efectuar un cambio de ruta (similar a un intercambiador de vías en un sistema ferroviario). CARRERA 27 - CALLE 9. CIUDAD UNIVERSITARIA - APDO. AÉREO 678 – BUCARAMANGA - COLOMBIA TEL. 6344000 - Ext.(s) 2472 - 1306 TELEFAX (97) 6346140 WEB: www.uis.edu.co/unidades académicas/facultades/facultad de Ingenierías Fisicomecanicas E-mail: [email protected] Seguidor de línea La categoría de seguidor de línea consiste en una competencia de velocidad, destreza y control para robots autónomos que deben recorrer, en el menor tiempo posible y cometiendo el menor número de faltas, un circuito construido con una línea negra sobre una superficie de fondo blanco. Dos robots harán parte de cada recorrido y el primero en cruzar la meta avanzará a la siguiente fase. La competencia se hará una (1) ronda. La cual se cumplirá haciendo el recorrido en sentido horario o haciendo el recorrido en sentido anti-horario (Se define por sorteo el día de la competencia). En cada ronda los robots deberán realizar un circuito que consta de 3 vueltas a la pista. Al cumplir la tercera vuelta, los robots se deben detener en la marca de inicio que está sobre la pista. Luchador de Sumo 3Kg CARRERA 27 - CALLE 9. CIUDAD UNIVERSITARIA - APDO. AÉREO 678 – BUCARAMANGA - COLOMBIA TEL. 6344000 - Ext.(s) 2472 - 1306 TELEFAX (97) 6346140 WEB: www.uis.edu.co/unidades académicas/facultades/facultad de Ingenierías Fisicomecanicas E-mail: [email protected] La categoría de robots consiste en una competencia en la que se enfrentan dos robots, simulando la lucha de dos guerreros sumo, en la que por medio de sus habilidades; tales como fuerza, velocidad y destreza; deben encontrar la forma de empujar y sacar a su oponente del área de combate. Dicha área está definida por una zona circular de color negro, llamado dohyo, bordeado externamente por una línea de color blanca. En cada combate se realizarán tres enfrentamientos y en cada enfrentamiento a cada robot se le suman puntos si resulta vencedor o se le restan puntos si comete faltas. Al final, ganará el robot que más puntos tenga. Inscripciones Para cada categoría el valor de la inscripción para las personas que no hacen parte del congreso, es de $ 80.000 hasta septiembre 28, y $100.000 hasta noviembre 14. Esto comprende la inscripción de cada robot (equipo). Si un mismo robot desea participar en diferentes categorías deberá cancelar el valor de la inscripción de la categoría a la cual va a participar. Por el pago de la inscripción, el equipo (robot representado por máximo tres personas) será acreedor a un certificado de participación en el concurso (para cada uno de los integrantes), y en caso de figurar en uno de los tres primeros lugares, recibirán un certificado a nombre del robot. Requisitos El evento es abierto a todo el público en general, es decir estudiantes universitarios, colegios, profesionales y empresas. No se permite el uso de robots o sistemas comerciales, el robot participante debe ser autónomo de total autoría de los participantes. Las demás restricciones son de tipo técnico, lo cual se considera especificar en la reglamentación de cada categoría. Sistema de Competencia y Cronograma de actividades Para cada una de las categorías, los participantes competirán por clasificar entre los cuatro primeros lugares, esto se llevará a cabo el primer día de competencia (Nov 15), es decir al finalizar la jornada de competencia tendremos cuatro robots de laberinto, cuatro de sumo y la misma cantidad de robots seguidores de línea. Cada uno de ellos al siguiente día de competencia (Nov 16) se batirá en la arena, buscando el triunfo, de acuerdo al siguiente cronograma: CARRERA 27 - CALLE 9. CIUDAD UNIVERSITARIA - APDO. AÉREO 678 – BUCARAMANGA - COLOMBIA TEL. 6344000 - Ext.(s) 2472 - 1306 TELEFAX (97) 6346140 WEB: www.uis.edu.co/unidades académicas/facultades/facultad de Ingenierías Fisicomecanicas E-mail: [email protected] Hora Competencia 8:00 AM 10:00 AM Pruebas Libres Eliminatoria Seguidor de Línea 2:00 PM Eliminatoria Laberinto Interactivo 4:00 PM Eliminatoria Sumo 3kg Competencias Noviembre 15 de 2012 Hora 10:00 AM Competenci Final Seguidor de a Línea 2:00 PM Final Sumo 3kg 4:00 PM Final Laberinto Interactivo Competencias Noviembre 16 de 2012 Premiación El representante de cada robot recibe la premiación, y ésta se hará de la siguiente manera: Un premio en efectivo, para el primero puesto. Un premio en efectivo, para el segundo puesto. Premios en especie para el tercer puesto. Certificado de participación para el representante principal y cada uno de los acompañantes. Categoría Primer puesto Segundo Puesto Tercer Puesto Laberinto Interactivo $ 1,000,000 $ 500,000 detalle Patrocinador Luchador de Sumo 3Kg $ 1,000,000 $ 500,000 detalle Patrocinador Seguidor de Línea $ 1,000,000 $ 500,000 detalle Patrocinador CARRERA 27 - CALLE 9. CIUDAD UNIVERSITARIA - APDO. AÉREO 678 – BUCARAMANGA - COLOMBIA TEL. 6344000 - Ext.(s) 2472 - 1306 TELEFAX (97) 6346140 WEB: www.uis.edu.co/unidades académicas/facultades/facultad de Ingenierías Fisicomecanicas E-mail: [email protected] Reglamento Competencia Laberinto Interactivo El laberinto interactivo consiste en un recorrido guiado por una línea de referencia de color negro sobre una superficie blanca, el laberinto posee diferentes niveles (pisos o plantas) a los cuales podrá acceder por distintas rutas, adicionalmente cuenta con diferentes rampas de acceso rectas y curvas tipo caracol; una de las rampas de acceso que permite el cambio entre el primer y segundo piso es de tipo móvil, es decir en algún momento permitirá el acceso y en otro lo bloqueará; en el primer piso existe otro sistema de cambio de rutas (intercambiador circular), el cual permitirá seleccionar 4 rutas diferentes dentro de mismo piso, el robot modificará la posición de estas a medida que navegue dentro del laberinto, sabiendo de antemano la posición inicial de estas y los puntos sobre los cuales deberá acceder el móvil para efectuar un cambio de ruta (similar a un intercambiador de vías en un sistema ferroviario). Descripción General La competencia se desarrollará con un robot por turno dentro del laberinto, cada equipo estará formados por uno, máximo tres integrantes, un equipo consta de un robot y su equipo de desarrolladores, uno de los cuales es el líder, quien será el único autorizado a entrar en la zona de competencia y de manipular el robot al que representa. El resto de los integrantes, tendrán que observar los acontecimientos desde el área de participantes. CARRERA 27 - CALLE 9. CIUDAD UNIVERSITARIA - APDO. AÉREO 678 – BUCARAMANGA - COLOMBIA TEL. 6344000 - Ext.(s) 2472 - 1306 TELEFAX (97) 6346140 WEB: www.uis.edu.co/unidades académicas/facultades/facultad de Ingenierías Fisicomecanicas E-mail: [email protected] Figura 1: Vista en perspectiva del laberinto interactivo El objetivo de la prueba consiste en recolectar dos (2) bolas de tenis estándar y llevarlas a la zona de descarga, una de ellas estará localizada en el segundo nivel del laberinto, exactamente al finalizar el puente (ver Fig. 2), la otra bola se sorteará de manera aleatoria dentro del laberinto. Figura 2: posibles posiciones de la bola dentro del laberinto y posición de la bola en el puente. NOTA: la circunferencia interna que se muestra en el intercambiador corresponde a la separación de la parte fija respecto a la móvil, NO se trata de una línea guía. Solo corresponde a la guía la línea demarcada como L la cual corresponde a ¼ de circunferencia. CARRERA 27 - CALLE 9. CIUDAD UNIVERSITARIA - APDO. AÉREO 678 – BUCARAMANGA - COLOMBIA TEL. 6344000 - Ext.(s) 2472 - 1306 TELEFAX (97) 6346140 WEB: www.uis.edu.co/unidades académicas/facultades/facultad de Ingenierías Fisicomecanicas E-mail: [email protected] Para la manipulación del intercambiador, se adecuaron 3 (tres) sensores en diferentes partes de la pista el primero de ellos se encuentra en el sendero de entrada-salida del laberinto, el segundo de ellos en la parte alta del caracol y el tercero en la parte superior de la rampa levadiza. La plataforma rotatoria o intercambiador se activa cada vez que el robot pasa por uno de los sensores anteriormente indicados, dando de esta manera una única ruta posible. Para la activación del puente el robot deberá acceder al punto A el cual activara el puente levadizo y dará acceso automático a la segunda bola, de igual manera se hará para dar acceso al primer piso una vez recoja la bola. La distribución de los sensores que determinan cada una de las acciones o movimientos de la pista se pueden ver en la figura 3. Figura 3: Distribución de sensores dentro del laberinto interactivo, posición inicial del intercambiador y puente. Para colocar el intercambiador y la rampa a sus posiciones iniciales, se dispone de un interruptor manual de RESET el cual colocará la pista en su estado inicial antes de que el robot inicie el recorrido (será manejado por el juez). CARRERA 27 - CALLE 9. CIUDAD UNIVERSITARIA - APDO. AÉREO 678 – BUCARAMANGA - COLOMBIA TEL. 6344000 - Ext.(s) 2472 - 1306 TELEFAX (97) 6346140 WEB: www.uis.edu.co/unidades académicas/facultades/facultad de Ingenierías Fisicomecanicas E-mail: [email protected] A) C) B) D) Figura 4: Posiciones del intercambiador: a) posición inicial, b) posición después de ingresar al laberinto, c) posición cuando llega a la cumbre del caracol, d) posición al subir el puente. Figura 5: Posiciones del puente: acceso inferior (izquierda) y acceso superior (derecha). CARRERA 27 - CALLE 9. CIUDAD UNIVERSITARIA - APDO. AÉREO 678 – BUCARAMANGA - COLOMBIA TEL. 6344000 - Ext.(s) 2472 - 1306 TELEFAX (97) 6346140 WEB: www.uis.edu.co/unidades académicas/facultades/facultad de Ingenierías Fisicomecanicas E-mail: [email protected] ESPECIFICACIONES DE LA PISTA DE COMPETENCIA La pista está construida en madera, con posibles desajustes de +/- 3 m.m. entre sus diferentes anclajes. Las barreras de protección tienen una altura de 10 cm. y son de color verde claro, algunas de ellas pueden llevar publicidad alusiva el evento, por lo cual se recomienda no hacer uso de estas para determinar la ruta del robot, dichas paredes son de protección a los robots en caso de que alguno de ellos se salga de la ruta, evitando de esta forma que caiga y se averíe debido al golpe. Las líneas guía serán hechas con cinta aislante negra las cuales tienen un ancho de 18 mm +/-2 m.m. (referencia: 3M electric tape o Cobra – black), el piso de la pista es color blanco mate. Las rampas de acceso tendrán una inclinación de 17 grados máximo. Esta totalmente prohibido apoyarse sobre la pista o sobre alguno de sus soportes, existen zonas por las cuales el encargado del robot podrá desplazarse libremente y actuar oportunamente en caso de alguna eventualidad. ESPECIFICACIONES DEL ROBOT Los robots deberán tener un volumen máximo de 25 cm. X 25 cm. X 25cm. Esto se exige ya que el ancho del sendero del laberinto es de 35 cm. El peso del robot (incluyendo accesorios y baterías) no debe exceder 3 kilogramos. (sin excepción alguna). No hay restricciones en el tipo de circuitos de control usado en los robots. NOTA: NO ESTA PERMITIDO EL USO DE PROTOBOARDS. No hay restricciones en cuanto a la marca o capacidad del control utilizado en los robots, pueden usarse FPGA’s, CPLD’s, Microprocesadores OnBoard, etc. La fuente de energía debe estar contenida dentro del robot. El robot debe ser totalmente autónomo, sin ningún tipo de control externo. CARRERA 27 - CALLE 9. CIUDAD UNIVERSITARIA - APDO. AÉREO 678 – BUCARAMANGA - COLOMBIA TEL. 6344000 - Ext.(s) 2472 - 1306 TELEFAX (97) 6346140 WEB: www.uis.edu.co/unidades académicas/facultades/facultad de Ingenierías Fisicomecanicas E-mail: [email protected] El robot debe tener una identificación asignada por los organizadores en un lugar visible sobre su estructura. RESTRICCIONES EN EL DISEÑO DEL ROBOT Cualquier incumplimiento de estas, es causal de descalificación inmediata: El robot no debe incluir partes que puedan dañar o deformar la pista. El robot no debe incluir substancias peligrosas, corrosivas, inflamables o explosivas. Solo serán permitidas las baterías tipo acido que estén selladas desde su fabricación (tipo Gel). El robot no debe incluir partes que permitan que se adhiera a la superficie de la pista (tales como; copas de succión, adhesivos, etc.) El robot debe ser totalmente autónomo y autocontenido, no tener ningún enlace alámbrico ni inalámbrico de cualquier (Infrarrojo, bluetooth, xbee, etc.) puede índole El robot deberá contar con un único interruptor de encendido colocado en un lugar visible. Los robots que cuenten con más de un interruptor iniciarán la prueba con un puntaje de -5 (menos cinco). CARRERA 27 - CALLE 9. CIUDAD UNIVERSITARIA - APDO. AÉREO 678 – BUCARAMANGA - COLOMBIA TEL. 6344000 - Ext.(s) 2472 - 1306 TELEFAX (97) 6346140 WEB: www.uis.edu.co/unidades académicas/facultades/facultad de Ingenierías Fisicomecanicas E-mail: [email protected] PRINCIPIOS DE LA COMPETENCIA Y PUNTUACIÓN La competencia se hará con un solo robot, el cual recorrerá la pista según preferencias del programador, se tendrán en cuenta la limpieza de la ejecución de las tareas asignadas. En el siguiente cuadro se muestra la puntuación para cada una de las tareas a realizar: Acción Puntaje Puntaje Máx Tocar la bola 2 4 Recoger la bola 3 6 Llegar a la meta 6 6 Descargar la bolas 2 4 Penalización interruptor Intentos fallidos -5 -5 -1 -3 Mejor tiempo por ronda Puntaje máximo total 2 2 22 INICIO Y FINAL DE LA COMPETENCIA Una vez los robots sean expuestos ante los jueces y estén debidamente pesados y medidos se procederá al sorteo del orden de partida, posteriormente se sorteará la posición de la bola aleatoria por cada ronda de competencia. El competidor deberá colocar el robot en su posición de inicio y activarlo cuando los jueces den la orden de salida el tiempo se tomara cuando cruce el punto S. (ver figura 3). El tiempo será detenido cuando el robot descargue las bolas en cualquiera de los tres depósitos disponibles. Si el robot pierde su trayectoria durante el recorrido y es ayudado por el participante, deberá reiniciar la prueba y tendrá una penalización de -1 (menos uno) punto, la prueba se podrá repetir un máximo de tres veces. Se tendrá en cuenta solo el máximo puntaje obtenido en las tres oportunidades. Los cuatro (4) robots que finalicen el recorrido con mayor puntaje pasarán a la final. CARRERA 27 - CALLE 9. CIUDAD UNIVERSITARIA - APDO. AÉREO 678 – BUCARAMANGA - COLOMBIA TEL. 6344000 - Ext.(s) 2472 - 1306 TELEFAX (97) 6346140 WEB: www.uis.edu.co/unidades académicas/facultades/facultad de Ingenierías Fisicomecanicas E-mail: [email protected] El competidor deberá alejarse de la pista de competencia una vez oprima el botón de inicio del robot, y deberá permanecer por fuera de la zona de seguridad (1 metro alrededor de la pista), hasta que la prueba termine o hasta que el juez lo autorice; de violarse esta condición, se asignaran -10 puntos. SUSPENSION DE LA COMPETENCIA Si el robot entra en un estado repetitivo no deseado, pero el participante no decide retirarlo debido a que en algún momento se espera regrese a su estado normal, podrá permanecer en ese estado por un máximo de 1 minuto. Si después de este tiempo el robot no regresa a su estado normal, se deberá reiniciar la prueba.} Puede pedirse una suspensión (la cual es de 10 minutos como máximo) por parte del competidor dado el caso de un accidente o daño al robot (no esta permitido modificar ni el software ni el hardware). CONSIDERACIONES Se les pide muy comedidamente a los participantes no objetar las decisiones de los jueces ya que estos han sido seleccionados para velar por las reglas con justicia y equidad. Los jueces tienen total autoridad sobre las reglas del evento. Si alguno de los integrantes del equipo se dirige a los jueces de manera irrespetuosa o vulgar, el robot será penalizado. En caso de repetirse esta acción, el robot será descalificado. Se exige buena fe y juego limpio, por lo tanto se invita a usar comportamientos, lenguaje, nombres y logos humorísticos y creativos, evitando alusiones soeces u ofensivas. Cada grupo participante deberá traer los materiales, instrumentos y herramientas que requiera para la calibración y puesta a punto de su robot. Los organizadores no prestarán ninguno de estos recursos. Si existe algún caso especial que no haya sido considerado en este reglamento, el coordinador del evento y los jurados lo analizarán y tendrán la autoridad de tomar la decisión más idónea y/o conveniente. De igual manera para la corrección de errores que sean detectados antes y/o durante la competencia. NOTA: ni la Universidad Industrial de Santander, ni los organizadores de este evento se hacen responsables por las lesiones causadas por alguno de los competidores. CARRERA 27 - CALLE 9. CIUDAD UNIVERSITARIA - APDO. AÉREO 678 – BUCARAMANGA - COLOMBIA TEL. 6344000 - Ext.(s) 2472 - 1306 TELEFAX (97) 6346140 WEB: www.uis.edu.co/unidades académicas/facultades/facultad de Ingenierías Fisicomecanicas E-mail: [email protected] RECLAMOS Un competidor que tenga algún reclamo en cuanto al reglamento, debe expresarlo pacíficamente al comité organizador antes del inicio de la competencia. Nota: este reglamento está sujeto a cambios por parte de los organizadores, sin previo aviso. Reglamento Competencia Seguidor de Línea La categoría de seguidor de línea consiste en una competencia de velocidad, destreza y control para robots autónomos que deben recorrer, en el menor tiempo posible y cometiendo el menor número de faltas, un circuito construido con una línea negra sobre una superficie de fondo blanco. Dos robots harán parte de cada recorrido y el primero en cruzar la meta avanzará a la siguiente fase. La competencia se hará una (1) ronda. La cual se cumplirá haciendo el recorrido en sentido horario o haciendo el recorrido en sentido anti-horario (Se define por sorteo el día de la competencia). En cada ronda los robots deberán realizar un circuito que consta de 3 vueltas a la pista. Al cumplir la tercera vuelta, los robots se deben detener en la marca de inicio que está sobre la pista. Descripción del área de competencia El área máxima de la zona de competencia es un tablero de forma rectangular de 3.66 m de largo por 2.44 m de ancho. El radio máximo de giro será de 50 cm. El radio mínimo de giro será de 5 cm. El tablero de la zona de competencia de seguidores de línea, no tiene paredes, ni externas ni internas. Tampoco existen paredes o bloques 3D que interrumpan la ruta definida por la línea negra. La ruta consistirá de una línea negra continua de 20±2 mm sobre fondo blanco. La ruta tiene una línea negra perpendicular a la línea de competencia de 10 cm de largo y de igual grosor a ésta, que se usa como línea de INICIO para los robots. La ruta del sendero se hará con cinta aislante negra, y por lo tanto existirán empates. Es responsabilidad de los participantes, garantizar que el robot sea inmune a estos detalles constructivos reales y por lo tanto que no lo afecten dichos empates. Los robots deben ser capaces de soportar hasta 2mm de desnivel en la superficie del tablero. CARRERA 27 - CALLE 9. CIUDAD UNIVERSITARIA - APDO. AÉREO 678 – BUCARAMANGA - COLOMBIA TEL. 6344000 - Ext.(s) 2472 - 1306 TELEFAX (97) 6346140 WEB: www.uis.edu.co/unidades académicas/facultades/facultad de Ingenierías Fisicomecanicas E-mail: [email protected] Iluminación en el sitio de competencia: El sitio de competencia estará iluminado de forma artificial y/o natural y las condiciones de luz pueden ser cambiantes, por lo cual no se garantiza que no existirán sombras. Durante la competencia existirán equipos de filmación y cámaras fotográficas que podrán generar haces infrarrojos por sus sistemas de autofoco, por lo tanto los robots deben estar preparados para que estas radiaciones y condiciones de luz cambiante no los afecten. La forma del recorrido a seguir por los robots, no será conocido de antemano por los participantes. Dicho recorrido se dará a conocer tres semanas antes el día del evento. ESPECIFICACIONES DEL ROBOT No hay restricciones en el tipo de circuitos de control usado en los robots. NOTA: NO ESTA PERMITIDO EL USO DE PROTOBOARDS. No hay restricciones en cuanto a la marca o capacidad del control utilizado en los robots, pueden usarse FPGA’s, CPLD’s, Microprocesadores OnBoard, etc. La fuente de energía debe estar contenida dentro del robot. El robot debe ser totalmente autónomo, sin ningún tipo de control externo. El robot debe tener una identificación asignada por los organizadores en un lugar visible sobre su estructura. RESTRICCIONES EN EL DISEÑO DEL ROBOT Cualquier incumplimiento de estas, es causal de descalificación inmediata: El robot no debe incluir partes que puedan dañar o deformar la pista. El robot no debe incluir substancias peligrosas, corrosivas, inflamables o explosivas. Solo serán permitidas las baterías tipo acido que estén selladas desde su fabricación (tipo Gel). El robot no debe incluir partes que permitan que se adhiera a la superficie de la pista (tales como; copas de succión, adhesivos, etc.) CARRERA 27 - CALLE 9. CIUDAD UNIVERSITARIA - APDO. AÉREO 678 – BUCARAMANGA - COLOMBIA TEL. 6344000 - Ext.(s) 2472 - 1306 TELEFAX (97) 6346140 WEB: www.uis.edu.co/unidades académicas/facultades/facultad de Ingenierías Fisicomecanicas E-mail: [email protected] El robot debe ser totalmente autónomo y autocontenido, no puede tener ningún enlace alámbrico ni inalámbrico de cualquier índole (Infrarrojo, bluetooth, xbee, etc.). El robot deberá contar con un único interruptor de encendido colocado en un lugar visible, además de indicador(es) luminosos para verificar si está encendido. INICIO Y FINAL DE LA COMPETENCIA Una vez los robots sean expuestos ante los jueces se procederá al sorteo del orden de partida. El competidor deberá colocar el robot en su posición de inicio y activarlo cuando los jueces den la orden de salida . El tiempo será detenido cuando el robot finalice la tercera vuelta y pase por la línea de meta. (Sin no se detiene al finalizar será penalizado con 90 segundos). Si el robot pierde su trayectoria durante el recorrido y es ayudado por el participante, deberá reiniciar la prueba y tendrá una penalización de 30 segundos, la prueba se podrá repetir un máximo de tres veces. Las penalizaciones serán sumadas mejor tiempo realizado por el robot. Se tendrá en cuenta solo el mejor tiempo obtenido en las tres oportunidades. Los cuatro (4) robots que finalicen el recorrido con mayor puntaje pasarán a la final. El competidor deberá alejarse de la pista de competencia una vez oprima el botón de inicio del robot, y deberá permanecer por fuera de la zona de seguridad (1 metro alrededor de la pista), hasta que la prueba termine o hasta que el juez lo autorice; de violarse esta condición, se penalizará con 60 segundos sobre el tiempo de recorrido. SUSPENSION DE LA COMPETENCIA Si el robot entra en un estado repetitivo no deseado, pero el participante no decide retirarlo debido a que en algún momento se espera regrese a su estado normal, podrá permanecer en ese estado por un máximo de 30 segundos. Si después de este tiempo el robot no regresa a su estado normal, se deberá reiniciar la prueba. CARRERA 27 - CALLE 9. CIUDAD UNIVERSITARIA - APDO. AÉREO 678 – BUCARAMANGA - COLOMBIA TEL. 6344000 - Ext.(s) 2472 - 1306 TELEFAX (97) 6346140 WEB: www.uis.edu.co/unidades académicas/facultades/facultad de Ingenierías Fisicomecanicas E-mail: [email protected] Puede pedirse una suspensión (la cual es de 10 minutos como máximo) por parte del competidor dado el caso de un accidente o daño al robot (no está permitido modificar ni el software ni el hardware). CONSIDERACIONES Se les pide muy comedidamente a los participantes no objetar las decisiones de los jueces ya que estos han sido seleccionados para velar por las reglas con justicia y equidad. Los jueces tienen total autoridad sobre las reglas del evento. Si alguno de los integrantes del equipo se dirige a los jueces de manera irrespetuosa o vulgar, el robot será penalizado. En caso de repetirse esta acción, el robot será descalificado. Se exige buena fe y juego limpio, por lo tanto se invita a usar comportamientos, lenguaje, nombres y logos humorísticos y creativos, evitando alusiones soeces u ofensivas. Cada grupo participante deberá traer los materiales, instrumentos y herramientas que requiera para la calibración y puesta a punto de su robot. Los organizadores no prestarán ninguno de estos recursos. Si existe algún caso especial que no haya sido considerado en este reglamento, el coordinador del evento y los jurados lo analizarán y tendrán la autoridad de tomar la decisión más idónea y/o conveniente. De igual manera para la corrección de errores que sean detectados antes y/o durante la competencia. NOTA: ni la Universidad Industrial de Santander, ni los organizadores de este evento se hacen responsables por las lesiones causadas por alguno de los competidores. RECLAMOS Un competidor que tenga algún reclamo en cuanto al reglamento, debe expresarlo pacíficamente al comité organizador antes del inicio de la competencia. Nota: este reglamento está sujeto a cambios por parte de los organizadores, sin previo aviso. CARRERA 27 - CALLE 9. CIUDAD UNIVERSITARIA - APDO. AÉREO 678 – BUCARAMANGA - COLOMBIA TEL. 6344000 - Ext.(s) 2472 - 1306 TELEFAX (97) 6346140 WEB: www.uis.edu.co/unidades académicas/facultades/facultad de Ingenierías Fisicomecanicas E-mail: [email protected] Reglamento Competencia Robot Sumo 3kg La categoría de robots macro-sumo consiste en una competencia en la que se enfrentan dos robots, simulando la lucha de dos guerreros sumo, en la que por medio de sus habilidades; tales como fuerza, velocidad y destreza; deben encontrar la forma de empujar y sacar a su oponente del área de combate. Dicha área está definida por una zona circular de color negro, llamado dohyo, bordeado externamente por una línea de color blanca, como se muestra la figura 1. En cada combate se realizarán tres enfrentamientos y en cada enfrentamiento a cada robot se le suman puntos si resulta vencedor o se le restan puntos si comete faltas. Al final, ganará el robot que más puntos tenga. DESCRIPCIÓN DEL ESPACIO DE COMPETENCIA La superficie de combate es una zona circular llamada dohyo, que consiste en un cilindro de madera de 150 cm de diámetro por 5 cm de alto. La parte interior del dohyo es de color negro mate y en la parte exterior es bordeado por una zona blanca de 5 cm de ancho, tal como se muestra en la figura 1 (en esta figura, la parte interna del dohyo se ve de color gris, pero en el dohyo real es de color negro). Figura 1. Vista superior del Dohyo robots sumo 3Kg CARRERA 27 - CALLE 9. CIUDAD UNIVERSITARIA - APDO. AÉREO 678 – BUCARAMANGA - COLOMBIA TEL. 6344000 - Ext.(s) 2472 - 1306 TELEFAX (97) 6346140 WEB: www.uis.edu.co/unidades académicas/facultades/facultad de Ingenierías Fisicomecanicas E-mail: [email protected] En el centro del dohyo hay dos marcas hechas con marcador de color negro y que corresponden a las posiciones iniciales de combate de los robots (shikiri). Estas marcas son dos líneas paralelas, cada una de 5 cm de largo, de ± 1 cm de ancho y separadas 5 cm una de la otra, como se muestra en la figura 1. También hay una línea central hecha con marcador de color negro para distinguir cada uno de los hemisferios del dohyo. El sitio de competencia estará iluminado de forma artificial y/o natural y las condiciones de luz pueden ser cambiantes, por lo cual no se garantiza que no existirán sombras. Durante la competencia existirán equipos de filmación y cámaras fotográficas que podrán generar haces infrarrojos por sus sistemas de autofoco, por lo tanto los robots deben estar preparados para que estas radiaciones y condiciones de luz cambiante no los afecten. Alrededor del dohyo, habrá una zona de seguridad con un perímetro de 30 cm de protección dentro de la cual no puede estar ningún competidor ni ningún jurado, cuando los robots estén compitiendo, para evitar interferencias o lecturas falsas de los sensores de los robots. CARACTERÍSTICAS DE LOS ROBOTS En esta categoría, las dimensiones máximas del robot serán: 20 cm de largo y 20 cm de ancho. No hay restricción de altura. Las medidas pueden ser inferiores a los límites máximos. Si un robot supera dichas dimensiones máximas, quedará descalificado. Basados en la norma internacional, el robot debe tener un peso máximo de 3 Kg. En las exigencias del peso, se permite una desviación del 1% (30 g). La tolerancia de la balanza que se va a utilizar para pesar los robots es de 1 g. Se recomienda por tanto que el diseño del robot no considere la tolerancia como factor de ventaja, pues esta no es discutible ante el jurado. Si un robot supera este peso máximo, quedará descalificado. Los robots deberán ser capaces de superar desniveles en la pista de hasta ±2 mm de altura. El robot debe ser completamente autónomo con inteligencia a bordo, no debe estar conectado a fuentes de alimentación externa, ni a ningún dispositivo inalámbrico que permita ser controlado a distancia por el participante. El robot no debe tener ninguna parte que se desconecte o separe del robot principal. Partes extensibles serán aceptadas, siempre y cuando permanezcan dentro de las dimensiones máximas permitidas. En la CARRERA 27 - CALLE 9. CIUDAD UNIVERSITARIA - APDO. AÉREO 678 – BUCARAMANGA - COLOMBIA TEL. 6344000 - Ext.(s) 2472 - 1306 TELEFAX (97) 6346140 WEB: www.uis.edu.co/unidades académicas/facultades/facultad de Ingenierías Fisicomecanicas E-mail: [email protected] competencia un robot no puede perder alguna de sus piezas, es decir, ninguna de sus partes puede dejar de tener contacto con el cuerpo principal del robot. No está permitido el uso de bombas de vacío, imanes o algún otro medio que le permita al robot adherirse o fijarse a la superficie del doyho. Tampoco se permitirá que pueda dividirse en múltiples robots. El robot no debe marcar, modificar o dañar de ninguna forma el dohyo. El robot no debe lanzar líquido, ni gas, ni fuego, etc., ni utilizar herramientas cortantes que dañen al oponente. El robot debe tener un sólo interruptor de encendido general, en un lugar visible para los jurados, con el cual deberá iniciar o detener al robot. Sólo este interruptor puede ser manipulado por el participante después de colocar el robot en el punto de inicio en el dohyo. Después de manipular dicho interruptor deben transcurrir 5 s antes que el robot comience a moverse. Este retardo de 5 s para que el robot comience a moverse, es un requisito que se debe cumplir para que el representante tenga el tiempo suficiente para retirarse por fuera de la zona de seguridad y no interfiera en la lectura de los sensores. Sustancias pegajosas para mejorar la tracción de los robots no están permitidas. Las llantas y otros componentes del robot en contacto con el ring no deben tener capacidad de sostener una carta de 3x5”estándar por más de cinco segundos. De no cumplir las anteriores condiciones el robot podría ser descalificado del evento. CARRERA 27 - CALLE 9. CIUDAD UNIVERSITARIA - APDO. AÉREO 678 – BUCARAMANGA - COLOMBIA TEL. 6344000 - Ext.(s) 2472 - 1306 TELEFAX (97) 6346140 WEB: www.uis.edu.co/unidades académicas/facultades/facultad de Ingenierías Fisicomecanicas E-mail: [email protected] DESCRIPCIÓN DE LA COMPETENCIA Un combate consiste de 3 rounds, cada uno de un máximo de 3 minutos, exceptuando si en algún caso los jueces extienden este tiempo. El equipo que gane dos rounds o reciba dos puntos Yuhkoh primero, dentro del tiempo límite, ganara el combate. Un equipo recibe un punto Yuhkoh cuando ganan un round. Si el tiempo límite se ha alcanzado antes que un equipo obtenga dos puntos Yuhkoh, y uno de los equipos ha recibido un punto Yuhkoh, este equipo con un punto Yuhkoh ganara. Cuando el combate no es ganado por ningún equipo dentro del tiempo establecido, un combate adicional puede ser realizado, durante el cual el primer equipo que reciba un punto Yuhkoh ganara. Alternativamente, el ganador/perdedor del combate será definido por los jueces, por sumatoria de puntos o mediante un juego adicional. Un punto Yuhkoh debe ser dado al ganador cuando la decisión de los jueces es requerida o la suma de puntos es requerida para definir ganador/perdedor. Luego de la instrucción del juez, los dos equipos se saludan en las afueras del ring. Luego se acercan al r ing y ubican al robot en su lado correspondiente, detrás de las líneas Shikiri. (No está permitido ubicar al robot en una posición diferente.) Cuando el juez anuncia el inicio del round, los equipos inicializan sus robots, y luego de 5 segundos de pausa los robots pueden empezar a operar. Durante estos 5 segundos, los líderes de equipo saldrán del área del ring. El combate se detiene y se reinicia cuando el juez así lo anuncia. El combate finaliza cuando el juez principal lo anuncia. Los dos equipos retiran los robots del ring y se saludan mutuamente. Un combate será realizado por un total de 3 minutos, iniciando y terminando al comando del juez. El reloj debe contar 5 segundos después que el arranque sea anunciado. Un combate extra, si así lo decide conveniente el Juez, deberá durar máximo 3 minutos. Entre cada uno de los enfrentamientos, se les dará un tiempo de 30 s a los equipos participantes para ajustar sus robots. No se permite ni el cambio ni la recarga de baterías. Tampoco se permitirán modificaciones de tipo electrónico o de software. Entre combates se dará un tiempo de 3 m Lo siguiente no está incluido en el tiempo de combate: 1. El tiempo transcurrido luego que el juez anuncia un punto Yuhkoh y antes que el juego se reanude. El retraso estándar antes que un combate se reanude es de 30 segundos. CARRERA 27 - CALLE 9. CIUDAD UNIVERSITARIA - APDO. AÉREO 678 – BUCARAMANGA - COLOMBIA TEL. 6344000 - Ext.(s) 2472 - 1306 TELEFAX (97) 6346140 WEB: www.uis.edu.co/unidades académicas/facultades/facultad de Ingenierías Fisicomecanicas E-mail: [email protected] 2. El tiempo transcurrido luego que un juez anuncia detener el combate y antes que el combate se reanude. PUNTUACIÓN Un punto Yuhkoh será otorgado cuando: 1. Un equipo legalmente empuje el cuerpo de su oponente robot hasta hacerlo tocar el espacio exterior del ring de Sumo y este a su vez permanezca dentro del dohyo. Si ambos salen del dohyo se declara empate. 2. Un punto Yuhkoh se da también en los siguientes casos: Cuando el robot oponente ha tocado el espacio exterior del ring por sí mismo. Cuando algo de lo mencionado anteriormente ocurra al mismo tiempo que el final del combate sea anunciado. 3. Cuando un Robot caiga sobre el ring de Sumo o algo parecido (dentro del ring), el punto Yuhkoh no será contado y el combate continuara. CONSIDERACIONES El combate deberá ser detenido y un nuevo combate será iniciado bajo las siguientes condiciones: Cuando los robots estén atascados u orbitándose uno con otro sin progreso perceptible durante 15 segundos. Si no es claro si hay o no progreso en el combate, el juez puede extender el tiempo límite para ver progreso en el mismo, por máximo 30 segundos. Cuando ambos robots se mueven, sin hacer algún progreso, o cuando se detienen (en el mismo tiempo) y permanecen detenidos por 10 segundos sin tocarse el uno con el otro. No obstante, si un robot detiene su movimiento primero, luego de 10 segundos será declarado como inhábil para la competencia. En este caso, el oponente recibirá un punto Yuhkoh, aun si el oponente también se detiene. Si ambos robots se mueven y no hay claridad si se está dando algún progreso en el combate, el juez podrá extender el tiempo límite hasta por 30 segundos. Si los dos robots tocan el exterior del ring, y el juez no se puede determinar quién toco esta superficie primero, serán llamados a un nuevo combate. CARRERA 27 - CALLE 9. CIUDAD UNIVERSITARIA - APDO. AÉREO 678 – BUCARAMANGA - COLOMBIA TEL. 6344000 - Ext.(s) 2472 - 1306 TELEFAX (97) 6346140 WEB: www.uis.edu.co/unidades académicas/facultades/facultad de Ingenierías Fisicomecanicas E-mail: [email protected] Antes de iniciar la competencia, se revisará que todos los participantes hayan cancelado el valor referente a la inscripción. Los organizadores no autorizarán, en ningún caso y sin apelación, la participación de competidores que no hayan realizado dicho pago. Antes de iniciar los combates los robots deben ser pesados, medidos y verificado el tiempo de inicio de 5 segundos, luego permanecerán apagados en un sitio determinado con anterioridad hasta que le corresponda el turno de competencia. La ubicación de inicio de los robots será sorteada y será igual para todos. Se otorgara una mesa y un tomacorriente El sitio de competencia estará iluminado de forma artificial ó natural y las condiciones de luz pueden ser cambiantes, por lo cual no se garantiza que no existirán sombras. Durante la competencia existirán equipos de filmación y cámaras fotográficas que podrán generar haces infrarrojos por sus sistemas de autofoco, por lo tanto los robots deben estar preparados para que estas radiaciones y condiciones de luz cambiante no los afecten. Se da entender que si hubiera algún mal entendido en el contenido de las bases, estas podrían corregirse y detallarse para el buen entendimiento de los concursantes, por tal motivo estos cambios se darán a conocer a todos los concursantes en su debido tiempo. Dependiendo de la cantidad de participantes, el día del evento se definirá la forma de clasificación. Se les pide muy comedidamente a los participantes no objetar las decisiones de los jueces ya que estos han sido seleccionados para velar por las reglas con justicia y equidad. Los jueces tienen total autoridad sobre las reglas del evento. Si alguno de los integrantes del equipo se dirige a los jueces de manera irrespetuosa o vulgar, el robot será penalizado. En caso de repetirse esta acción, el robot será descalificado. Se exige buena fe y juego limpio, por lo tanto se invita a usar comportamientos, lenguaje, nombres y logos humorísticos y creativos, evitando alusiones soeces u ofensivas. Cada grupo participante deberá traer los materiales, instrumentos y herramientas que requiera para la calibración y puesta a punto de su robot. Los organizadores no prestarán ninguno de estos recursos. Si existe algún caso especial que no haya sido considerado en este reglamento, el coordinador del evento y los jurados lo analizarán y tendrán la autoridad de tomar la decisión más idónea y/o conveniente. De igual manera para la corrección de errores que sean detectados antes y/o durante la competencia. Nota: este reglamento está sujeto a cambios por parte de los organizadores, sin previo aviso. CARRERA 27 - CALLE 9. CIUDAD UNIVERSITARIA - APDO. AÉREO 678 – BUCARAMANGA - COLOMBIA TEL. 6344000 - Ext.(s) 2472 - 1306 TELEFAX (97) 6346140 WEB: www.uis.edu.co/unidades académicas/facultades/facultad de Ingenierías Fisicomecanicas E-mail: [email protected]