Algoritmos para redes. - Departamento de Electrónica
Anuncio

1
Algoritmos para el análisis
de redes.
El disponer de herramientas computacionales que resuelvan
sistemas de ecuaciones no lineales dinámicos y que permitan
desplegar las formas de ondas de las respuestas, puede llevar a
desconocer la forma en que estas herramientas ocupan los
conceptos y teorías en que están basadas.
Se desea usar herramientas computacionales para resolver
los problemas matemáticos asociados a la teoría de redes y a la
vez ilustrar en qué aspectos de la teoría están basados los
programas y aplicaciones de análisis de redes de tipo
electrónicas.
A partir de la teoría básica de las redes eléctricas se
modelará la red en términos de un sistema de ecuaciones.
Debido a los diferentes modelos matemáticos de representación,
primero se expondrán los algoritmos numéricos simplificados,
para resolver:
un sistema algebraico de ecuaciones,
un sistema de ecuaciones diferenciales de primer orden,
un sistema de ecuaciones no lineales,
la linealización de un sistema no lineal para señales
pequeñas en comparación con los valores de polarización.
A través de Maple se ilustrarán algoritmos simplificados que
realizan las mismas funciones que los sofisticados algoritmos
internos que emplea SPICE para los diferentes análisis que
efectúa.
La reproducción de los ejemplos propuestos frente a un
computador permite la asimilación más rápida de los conceptos
que se exponen.
Profesor Leopoldo Silva Bijit
30/12/2009
2
Algoritmos para el análisis de redes.
1. Métodos de análisis para redes estáticas.
Están basados en resolver un sistema lineal de ecuaciones.
1.1. Formulación de ecuaciones.
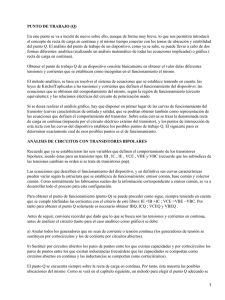
La siguiente red se estudia en condiciones estacionarias. Si
existieran condensadores éstos se reemplazan por circuitos
abiertos; los inductores por cortocircuitos. Las resistencias se
consideran elementos lineales.
R1
1
i01
v1
R3
2
3
R5
4
I(R2)
E
v2
R4
R2
v3 R6
v4
0
Figura 1. Red resistiva.
Aplicando método nodal, considerando una
adicional por cada fuente de tensión se obtienen:
i01 (v1 v2 ) / R1
v1
incógnita
0
E
(v2 v1 ) / R1 v2 / R2 (v2 v3 ) / R3
0
(v3 v2 ) / R3 v3 / R4 (v3 v4 ) / R5
0
(v4 v3 ) / R5 v4 / R6
0
Además de las cuatro incógnitas de los voltajes de nodos,
aparece la corriente i01 en la fuente de tensión.
Expresando en forma matricial, se obtiene:
Profesor Leopoldo Silva Bijit
30/12/2009
Teoría de Redes Eléctricas.
1
0
0
3
1
R1
1
R1
0
0
1
1
R1
0
1
R2
0
1
R3
0
1
R1
0
0
1
R3
0
0
0
1
R3
1
R3
1
R4
0
1
R5
1
R5
1
R5
1
R5
i01
v1
v2
v3
v4
0
E
0
0
0
1
R6
La matriz de coeficientes resulta no simétrica y no densa
(sparse en inglés); es decir, con numerosos elementos con valor
cero.
1.2. Modelo matemático.
Si se aplica método nodal con modificaciones, para tratar
fuentes de voltajes controladas e independientes, se obtiene un
sistema de ecuaciones, del tipo:
A x
b
Donde A es la matriz nodal aumentada, x es el vector de
incógnitas y b el vector de excitaciones.
Existen dos esquemas generales para resolver sistemas
lineales de ecuaciones: Métodos de eliminación directa y
Métodos Iterativos. Los métodos directos, están basados en la
técnica de eliminación de Gauss, que mediante la aplicación
sistemática de operaciones sobre los renglones transforma el
problema original de ecuaciones en uno más simple de resolver.
De entre los variados esquemas, basados en la eliminación
de Gauss, el método de descomposición en submatrices
triangulares (LU, de Lower y Upper) es preferentemente
empleado en implementaciones computacionales, para sistemas
de menos de 300 ecuaciones.
Profesor Leopoldo Silva Bijit
30/12/2009
4
Algoritmos para el análisis de redes.
Para sistemas de un mayor número de ecuaciones se
emplean métodos iterativos.
La mayoría de estos procedimientos están basados en el
método de Gauss Seidel, con aceleraciones para la
convergencia.
1.3. Descomposición LU.
Está basado en descomponer la matriz de coeficientes en dos
matrices triangulares L y U, según:
A
L U
Donde L es una matriz triangular inferior (lower), y U es una
matriz triangular superior (upper).
El sistema original de ecuaciones, queda:
L U x
Que puede
ecuaciones:
ser
b
interpretado
como
L d
b
U x
d
dos
sistemas
de
Los dos sistemas anteriores son sencillos de resolver, como
se verá más adelante. El sistema con matriz L, puede ser
resuelto por substituciones hacia adelante; el sistema con
matriz U se resuelve por substituciones hacia atrás.
El procedimiento está basado en obtener las matrices L y U,
a partir de A; luego en obtener el vector d; y finalmente en
calcular la solución en el vector x.
Existen varias formas de efectuar la descomposición, el
método de Doolittle asigna unos a los elementos de la diagonal
principal de L.
Veremos a través de un ejemplo, las principales ideas,
intentando obtener un algoritmo para el cálculo.
Se tiene la matriz A de 4x4 y se desea obtener L y U.
Profesor Leopoldo Silva Bijit
30/12/2009
Teoría de Redes Eléctricas.
A
a11 a12
a21 a22
a31 a32
a41 a42
a13
a23
a33
a43
a14
a24
a34
a44
5
1
0
1
l21
l31 l32
l41 l42
0 0
0 0
1 0
l43 1
u11 u12 u13
0 u22 u23
0
0 u33
0
0
0
u14
u24
u34
u44
Efectuando la multiplicación de las matrices L y U, se
obtiene:
A
u11
l21u11
l31u11
l41u11
u12
l21u12 u22
l31u12 l32u22
l41u12 l42u22
u13
l21u13 u23
l31u13 l32u23 u33
l41u13 l42u23 l43u33
u14
l21u14 u24
l31u14 l32u24 u34
l41u14 l42u24 l43u34 u44
El primer renglón de A permite, por comparación, determinar
el primer renglón de U.
u11
a11 ; u12
a12 ; u13
a13 ; u14
a14
Una vez conocido u11, la primera columna de A permite
determinar el primer renglón de L, se obtienen:
l21
a21 / u11 ; l31
a31 / u11 ; l41
a41 / u11
El segundo renglón de A, permite calcular el segundo renglón
de U, una vez conocidos los elementos del primer renglón de U,
se tienen:
l21u12 u22
a22 ; l21u13 u23
a23 ; l21u14 u24
a24
Despejando los elementos del segundo renglón de U, se
obtienen:
u22
a22 l21u12
u23
a23 l21u13
u24
a24 l21u14
Profesor Leopoldo Silva Bijit
30/12/2009
6
Algoritmos para el análisis de redes.
La segunda columna de A, permite calcular la segunda
columna de L.
l31u12 l32u22
a32 ; l41u12 l42u22
a42
Despejando los elementos de la segunda columna de L. se
obtienen:
l32
(a32 l31u12 ) / u22
l42
(a42 l41u12 ) / u22
Del tercer renglón de A, resultan:
l31u13 l32u23 u33
a33 ; l31u14 l32u24 u34
a34
Las que permiten despejar los elementos del tercer renglón
de U:
u33
a33 l31u13 l32u23
u34
a34 l31u14 l32u24
De la tercera columna de A, se puede calcular la tercera
columna de L:
l43
(a43 l41u13 l42u23 ) / u33
Finalmente, el cuarto renglón de A, permite calcular el cuarto
renglón de U.
u44
a44 l41u14 l42u24 l43u34
Si bien se ha desarrollado para una matriz de 4x4, de las
expresiones obtenidas puede inducirse que el n-avo renglón de
U se obtiene según:
ln, n 1
n 1
un,i
an,i
ln, k uk ,i
k 1
Para: i
n,..., N ;
Y la n-ava columna de L con:
Profesor Leopoldo Silva Bijit
30/12/2009
Teoría de Redes Eléctricas.
7
n 1
l j,n
a j,n
l j , k uk , n / un, n
k 1
Para: j n 1,..., N
Donde N es el número de renglones y columnas de A.
De la relación:
L d
b
Se obtiene:
l11 0 0 0 d1
l21 l22 0 0 d 2
l31 l32 l33 0 d3
l41 l42 l43 l44 d 4
b1
b2
b3
b4
Efectuando las multiplicaciones, en el lado derecho, se tiene:
l11d1
l21d1 l22 d 2
l31d1 l32 d 2 l33d3
l41d1 l42 d 2 l43d3 l44 d 4
b1
b2
b3
b4
Las componentes del vector d, se obtienen según:
d1
b1 / l11
d2
(b2 l21d1 ) / l22
d3
(b3 l31d1 l32 d 2 ) / l33
d4
(b4 l41d1 l42 d 2 l43d3 ) / l44
Una vez obtenido d1, se substituye en la expresión siguiente
para calcular d2; con d1 y d2, se puede calcular d3; y así
sucesivamente. Por esta razón, al procedimiento se lo denomina
substitución hacia adelante (forward).
El vector d, puede recalcularse para diferentes valores del
vector b, que es la situación que se produce en un barrido DC.
Debido a que en el método de Gauss se ocupa, desde el inicio
Profesor Leopoldo Silva Bijit
30/12/2009
8
Algoritmos para el análisis de redes.
de las operaciones, los valores de b; el efectuar cálculos con b
variable lo realiza con ventajas el método de descomposición
triangular.
La relación anterior, permite deducir una expresión para
calcular los di, en una matriz de orden N.
i l
di
(bi
lij d j ) / lii
j 1
Para: i
1, 2,
,N
Para la triangular superior:
U x
d
Se tiene:
u11 u12
0 u22
0
0
0
0
u13 u14
u23 u24
u33 u34
0 u44
x1
x2
x3
x4
d1
d2
d3
d4
Efectuando las multiplicaciones, se obtiene:
u11 x1 u12 x2 u13 x3 u14 x4
u22 x2 u23 x3 u24 x4
u33 x3 u34 x4
u44 x4
d1
d2
d3
d4
Despejando los xi, se obtienen:
x4
d 4 / u44
x3
(d3 u34 x4 ) / u33
x2
(d 2 u23 x3 u24 x4 ) / u22
x1
(d1 u12 x2 u13 x3 u14 x4 ) / u11
Que entrega la solución del sistema de ecuaciones. Nótese
que primero se obtiene x4; y luego x3, que se calcula en
Profesor Leopoldo Silva Bijit
30/12/2009
Teoría de Redes Eléctricas.
9
términos de x4; y así sucesivamente. Por esta razón a este
algoritmo se lo denomina substitución hacia atrás (back).
En general:
xN
d N / u NN
N
di
xi
Para: i
( N 1), ( N 2),
uij x j
j i 1
uii
,3, 2,1
1.4. Implementación en Maple.
De las ecuaciones generales desarrolladas antes, se puede
traducir la descomposición LU, mediante:
Para: n 1,..., N ;
> for n from 1 to N do
l[n,n]:=1:
for i from n to N do
s:=0;
for k from 1 to (n-1) do
s:=s+l[n,k]*u[k,i]:
od:
u[n,i]:=a[n,i]-s:
#print(u[n,i]):
od:
for j from (n+1) to N do
s:=0:
for k from 1 to (n-1) do
s:=s+l[j,k]*u[k,n]:
od:
l[j,n]:=(a[j,n]-s)/u[n,n]:
#print(l[j,n]):
od:
od:
ln, n 1
Para: i
n,..., N ;
n 1
s
ln, k uk ,i
k 1
un,i
an,i s
Para: j
n 1,..., N
n 1
s
l j , k uk , n
k 1
l j,n
(a j , n
s ) / un , n
Se han colocado a la derecha las sumatorias obtenidas
antes.
El código para la substitución hacia adelante:
Profesor Leopoldo Silva Bijit
30/12/2009
10
Algoritmos para el análisis de redes.
> for i from 1 to N do
s:=0:
for j from 1 to (i-1) do
s:=s+l[i,j]*d[j]:
od:
d[i]:=(b[i]-s)/l[i,i]:
#print(d[i]);
od:
Para: i
1, 2,
,N
i l
s
lij d j
j 1
di
(bi s) / li ,i
El código para la substitución hacia atrás:
> x[N]:=d[N]/u[N,N]:
xN
d N / uNN
Para: i ( N 1), ( N 2),
for i from (N-1) by -1 to 1 do
s:=0;
N
for j from (i+1) to N do
s
uij x j
s:=s+u[i,j]*x[j]:
j i 1
od:
x[i]:=(d[i]-s)/u[i,i]:
xi (di s) / uii
#print(x[i]):
od:
, 3, 2,1
Para probar los algoritmos pueden definirse, antes de los
códigos anteriores, en forma simbólica los coeficientes, según:
> N:=3:
a[1,1]:=a11:a[1,2]:=a12:a[1,3]:=a13:
a[2,1]:=a21:a[2,2]:=a22:a[2,3]:=a23:
a[3,1]:=a31:a[3,2]:=a32:a[3,3]:=a33:
b[1]:=b1:b[2]:=b2:b[3]:=b3:
Y sacando los comentarios (#) se pueden observar la
generación de las fórmulas, para el caso N=3.
Si se dan valores numéricos a los coeficientes de la matriz A,
y al vector de excitaciones:
> datos:={a11=1,a12=2,a13=3,
a21=3,a22=2,a23=1,
a31=1,a32=-1,a33=-2,
b1=1,b2=2,b3=3}:
Se obtienen los valores de las incógnitas:
Profesor Leopoldo Silva Bijit
30/12/2009
Teoría de Redes Eléctricas.
11
> for i from 1 to N do
print(eval(x[i],datos)):
od:
Para los valores anteriores, se obtienen:
x1
13
, x2
4
21
, x3
4
11
4
En Maple, está implementado el algoritmo para resolver un
sistema de ecuaciones lineales, con el comando solve. Para el
mismo sistema anterior:
> ecs:={x1+2*x2+3*x3=1,3*x1+2*x2+x3=2,x1-x2-2*x3=3}:
> solve(ecs,{x1,x2,x3});
{ x3
11
, x2
4
-21
, x1
4
13
}
4
Dando iguales resultados.
1.5. Comandos Maple de álgebra lineal.
En el paquete de álgebra lineal, se tienen comandos para la
descomposición y las substituciones hacia adelante y hacia
atrás. Para la red de la Figura 1, se tienen:
> restart;with(linalg):
> A := array(1..5,1..5,[
[1,-1/R1,1/R1,0,0],
[0,1,0,0,0],
[0,-1/R1,1/R1+1/R2+1/R3,-1/R3,0],
[0,0,-1/R3,1/R3+1/R4+1/R5,-1/R5],
[0,0,0,-1/R5,1/R5+1/R6] ]):
> b:=vector([0,E,0,0,0]):
> LUdecomp(A,L='l',U='u'):
d := forwardsub(l,b):
x := backsub(u,d):
Con los datos para la red de la Figura 1:
> datos:={R1=1, R2=5, R3=3,R4=4, R5=1,R6=3, E=10}:
Se obtienen:
>i01:=eval(x[1],datos);v1:=eval(x[2],datos);
v2:=eval(x[3],datos); v3:=eval(x[4],datos);
i01
20 / 7, v1 10, v2
50 / 7, v3
Profesor Leopoldo Silva Bijit
20 / 7, v4 15 / 7
30/12/2009
12
Algoritmos para el análisis de redes.
1.6. Solución usando ecuaciones de la red y
solve de Maple.
Se plantean las ecuaciones de equilibrio de las componentes,
LVK en las mallas y LCK en los nodos, y se emplea el comando
solve, para resolver para todos los voltajes y corrientes de la
red. Para la red de la Figura 1, se tienen:
ecs:={v1=E, v12=R1*i12, v2=i20*R2, v23=i23*R3,
v3=R4*i30, v34=R5*i34, v4=R6*i40,
v1=v12+v2,v2=v23+v3,v3=v34+v4,
i01=i12,i12=i20+i23,i23=i30+i34,i34=i40};
incognitas:={v1,v12,i12,v2,i20,v23,i23,v3,i30,v34,i34,
v4,i40,i01}
sol:=solve(ecs, incognitas);
#Se asignan valores a las componentes:
valores:={E=10, R1=1, R2=5, R3=3, R4=4, R5=1, R6=3};
subs(valores, sol);
Se obtiene la solución para todas las variables de la red:
{i01 = 2.857142857, i40 = .7142857143, i30 = .7142857143,
v23 = 4.285714286, i20 = 1.428571429, v34 = .7142857143,
v2 = 7.142857143, v4 = 2.142857143, i23 = 1.428571429,
v3 = 2.857142857, v12 = 2.857142857, i12 = 2.857142857,
i34 = .7142857143, v1 = 10.};
1.7. Solución SPICE.
Se describe la red de la Figura 1, mediante un netlist, y se
emplea el modo .op, que resuelve el sistema de ecuaciones.
Red simple
*Descripción de la red.
V1 1
0
DC
10.0V ; Fuente de voltaje:
*
Comienza con V. Polaridad de 1 a 0
R1 1
2
1.0
; Resistencias comienzan con R
R2 2
0
5.0
R3 2
3
3.0
R4 3
0
4.0
R5 3
4
1.0
R6 4
0
3.0
.OP
; Cálculo punto de operación.
.END
Profesor Leopoldo Silva Bijit
30/12/2009
Teoría de Redes Eléctricas.
13
Se obtienen los valores en el archivo de salida .out:
SMALL SIGNAL BIAS SOLUTION TEMPERATURE =27.000 DEG C
********************************************************************
NODE VOLTAGE
NODE VOLTAGE
NODE VOLTAGE
( 1)
10.0000
( 2) 7.1429
( 3)
2.8571
NODE VOLTAGE
( 4)
2.1429
VOLTAGE SOURCE CURRENTS
NAME
CURRENT
V1
-2.857E+00
TOTAL POWER DISSIPATION 2.86E+01 WATTS
Los resultados son similares a los obtenidos antes.
1.8 Métodos iterativos.
Para deducir expresiones generales que permitan escribir
algoritmos iterativos, consideremos el sistema lineal de tres
ecuaciones:
a11 a12
a21 a22
a31 a32
a13 x1
a23 x2
a33 x3
b1
b2
b3
Despejando de la primera ecuación, la variable x1 ; de la
segunda x2 ; y de la tercera x3 , obtenemos:
x1
(b1 a12 x2 a13 x3 ) / a11
x2
(b2 a21 x1 a23 x3 ) / a22
x3
(b3 a31 x1 a32 x2 ) / a33
Si consideramos conocidos los valores de las variables del
lado derecho, podremos estimar un nuevo valor para las
variables del lado izquierdo de las ecuaciones. Podemos anotar
lo anterior, mediante:
Profesor Leopoldo Silva Bijit
30/12/2009
14
Algoritmos para el análisis de redes.
x1[n 1] (b1 a12 x2 [n] a13 x3[n]) / a11
x2 [n 1] (b2 a21 x1[n] a23 x3[n]) / a22
x3[n 1] (b3 a31 x1[n] a32 x2 [n]) / a33
Durante el proceso iterativo se verifica la convergencia
calculando el mayor cambio relativo entre una iteración y la
siguiente, y comparando el valor absoluto de esta diferencia con
la tolerancia deseada.
| xi [n 1] xi [n] |
tolerancia
Si el error es menor que la exactitud requerida el proceso
termina; en caso contrario se realiza una nueva iteración.
Si se tienen N variables, pueden generalizarse las iteraciones
según:
j i 1
xi [n 1] (bi
j N
aij x j [n]
j 1
aij x j [n]) / aii
j i 1
El esquema anterior se reconoce como método de Jacobi.
Si el cálculo de las variables se realiza en orden, desde x1
hasta x N , puede observarse que una vez obtenido x1 puede
usarse este valor para calcular
x2 ; y así sucesivamente.
Entonces en el cálculo xi se pueden emplear los nuevos valores
de las variables desde x1 hasta xi 1 .
Entonces el esquema iterativo puede plantearse:
j i 1
xi [n 1] (bi
j N
aij x j [n 1]
j 1
aij x j [n]) / aii
j i 1
El que se denomina método de Gauss Seidel.
Mejores resultados se logran calculando las variables en
orden decreciente de los valores de la diagonal principal.
Profesor Leopoldo Silva Bijit
30/12/2009
Teoría de Redes Eléctricas.
15
Una mejora notable de la convergencia se logra empleando
un promedio ponderado de los resultados de las dos últimas
iteraciones para obtener el nuevo valor. Esto se denomina
método de sucesivas sobre relajaciones (SOR Successive OverRelaxation).
xi [n 1] axi [n 1] (1 a) xi [n]
Con: 0
a
2
Si a es 1, se tiene la fórmula de Gauss Seidel. Con a>1, el
nuevo valor, en la iteración (n+1), tiene mayor importancia. Con
a<1, se tiene subrelajación. La elección de este valor, y su
influencia en la convergencia debería aclararse en un curso de
análisis numérico.
Ejemplo.
Para el siguiente sistema lineal de ecuaciones:
1
3
1
2
2
1
3 x1
1 x2
2 x3
1
2
3
Las siguientes líneas implementan el algoritmo de Gauss
Seidel con sucesivas subrelajaciones.
> x1[0]:=0:x2[0]:=0:x3[0]:=0:nmax:=300:
err:=1e-6:alpha:=0.69:
> for n from 0 to nmax do
x1[n+1]:=(2-2*x2[n]-x3[n])/3;
x3[n+1]:=(1-x1[n+1]-2*x3[n])/3;
x2[n+1]:=(-3+x1[n+1]-2*x3[n+1])/2;
x1[n+1]:=(alpha*x1[n+1]+(1-alpha)*x1[n]):
x2[n+1]:=(alpha*x2[n+1]+(1-alpha)*x2[n]):
x3[n+1]:=(alpha*x3[n+1]+(1-alpha)*x3[n]):
if (abs(x1[n+1]-x1[n])<err) and
(abs(x2[n+1]-x2[n])<err) and
(abs(x3[n+1]-x3[n])<err)
then
# solución dentro de la tolerancia
break ;
fi ;
od:
Profesor Leopoldo Silva Bijit
30/12/2009
16
Algoritmos para el análisis de redes.
Se obtiene la respuesta en 13 iteraciones con el factor a=0,69.
Si se aplica factor a=1, se logra el resultado en 83 iteraciones.
Con factor a sobre 1,05 se requieren más de 300 iteraciones;
con valores del factor un poco mayores el algoritmo no
converge.
2. Métodos de análisis para redes dinámicas.
Los diferentes métodos generales de análisis de redes
permiten generar sistemas de ecuaciones diferenciales de
primer orden, en términos de los voltajes en los condensadores
y las corrientes en los inductores.
Para esto basta plantear los sistemas de ecuaciones en algún
conjunto de variables independientes, y luego expresar en
términos de las variables de las componentes dinámicas. Se
ilustra la metodología empleando el método de mallas y luego el
método mixto.
2.1. Método de mallas.
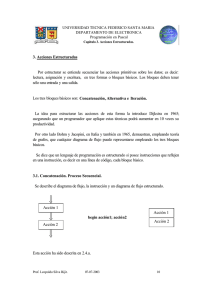
Analizar la siguiente red, aplicando método de mallas a la
red de la Figura 2.
a
b
ic
vf(t)
if(t)
C
R
kic
L
c
d
Figura 2. Diagrama de la red.
2.1.1. Identificación de las corrientes de
mallas.
Se identifican las corrientes de mallas:
Profesor Leopoldo Silva Bijit
30/12/2009
Teoría de Redes Eléctricas.
17
a
b
if(t)
ic
i2
C R
vf(t)
vi
i1
vC
i3
kic vic
L
c
d
Figura 3. Mallas.
La red es dinámica de segundo orden por lo cual las
variables de interés son el voltaje en el condensador, y la
corriente en el inductor.
2.2.2. Ecuaciones:
LVK en mallas:
vi
vf
vC ; L
di2
dt
R(i2 i3 ) vC ; vic
R(i3 i2 );
Ecuaciones de equilibrio:
C
dvC
dt
i1 i2 ; i1
i f ; i3
k (i1 i2 )
Hasta aquí la formulación del problema empleando la teoría
de redes. Se ha logrado un sistema de 6 ecuaciones
independientes en 6 incógnitas. Lo que resta es resolver el
sistema, y éste es un problema matemático.
2.1.3. Un método para papel y lápiz:
Deben eliminarse todas las variables, que no sean las de
interés.
Se reemplazan las ecuaciones de equilibrio en las de mallas,
resultando un sistema de ecuaciones diferenciales de primer
orden:
Profesor Leopoldo Silva Bijit
30/12/2009
18
Algoritmos para el análisis de redes.
di2
R(i2 (k (i f
dt
dv
C C
i f i2
dt
L
i2 )) vC
En caso de redes no planas la formulación es similar. Pero
debe usarse en forma explícita LCK.
Podría discutirse si es mejor exponer un método de análisis
en lugar de varios. Algunos opinan que el método nodal podría
ser suficiente, ya que el de mallas no puede emplearse en redes
no planas.
Pero en el método nodal se tiene que resolver: el tratamiento
de fuentes de tensión, el caso transitorio y la introducción de
elementos no lineales controlados por corrientes.
Sin embargo, el método que mejor se adapta a todo tipo de
situaciones es el método mixto. Consiste en escoger como
variables independientes: las corrientes de cuerdas y los
voltajes de ramas. La adecuada elección del árbol permite la
formulación dinámica de la red, en forma de un sistema de
ecuaciones diferenciales de primer orden.
2.2. Método mixto.
Analizar la siguiente red, aplicando método mixto a la red de
la Figura 4.
a
b
ic
vf(t)
if(t)
C
R
kic
L
c
d
Figura 4. Diagrama de la red.
Profesor Leopoldo Silva Bijit
30/12/2009
Teoría de Redes Eléctricas.
19
2.2.1. Elección de un árbol.
Se identifican las variables, empleando un árbol.
a
b
3
4
6
1
5
2
c
d
Figura 5. Árbol y variables.
La red es dinámica de segundo orden por lo cual las
variables de interés son el voltaje en el condensador, y la
corriente en el inductor.
2.2.2. Ecuaciones:
LCK. Corrientes de ramas en función de corrientes de
cuerdas:
i3
i4 ; i1
i2 i4 ; i5
i2 i6
LVK. Voltajes de cuerdas en función de voltajes de ramas.
v4
v1 v3 ; v2
v1 v5 ; v6
v5
Ecuaciones de equilibrio:
i1
C
dv1
; v2
dt
L
di2
; v3
dt
v f ; i4
i f ; i5
v5
; i6
R
ki1
Hasta aquí la formulación del problema empleando la teoría
de redes. Se ha logrado un sistema de 12 ecuaciones
independientes en 12 incógnitas. Lo que resta es resolver el
sistema, y éste es un problema matemático.
Profesor Leopoldo Silva Bijit
30/12/2009
20
Algoritmos para el análisis de redes.
2.2.3. Un método para papel y lápiz:
Deben eliminarse todas las variables, que no sean las de
interés.
Se reemplazan las ecuaciones de equilibrio en LCK y LVK:
dv1
dt
i3
if ;C
v4
v1 v f ; L
i2 i f ;
di2
dt
v5
R
i2 kC
v1 v5 ; v6
dv1
dt
v5
Se elimina v5 resultando las ecuaciones de estado:
dv1
i2 i f ;
dt
di
L 2 v1 R(1 k )i2
dt
C
Rki f ;
Que resultan iguales a las obtenidas empleando el método de
mallas, salvo que se ha empleado v1 , en lugar de vC .
Las ecuaciones que quedan, permiten calcular el resto de las
variables.
i3
i f ; v4
v1 v f ; v5
Ri2 kRC
dv1
; v6
dt
v5 ;
Se ha logrado un modelo matemático que describe la
conducta dinámica de la red, y resta resolver el sistema de
ecuaciones diferenciales de primer orden en las variables de
interés (variables de estado).
2.3. Solución Maple, para obtener las
ecuaciones de estado, y resolver las
ecuaciones diferenciales.
Empleando el procesador matemático Maple:
Profesor Leopoldo Silva Bijit
30/12/2009
Teoría de Redes Eléctricas.
21
> restart;
LCK
> lck:={i3=14, i1=i2-i4,i5=-i2-i6}:
LVK:
> lvk:={v4=v1-v3,v2=v5-v1,v6=v5}:
Ecuaciones de equilibrio:
> eq:={i4=ift,v3=vf,i1=C*DV1,v2=L*DI2,v5=R*i5,i6=k*i1}:
> ecs:= lck union lvk union eq:
> ec1:=eliminate(ecs,{i1,i3,i4,i5,i6,v2,v3,v4,v5, v6}):
> ec2:=solve(ec1[2], {DV1,DI2}):
>ecestado:=subs(v1=v1(t),i2=i2(t),DV1=diff(v1(t),t),
DI2=diff(i2(t),t),ec2):
> solresto:=subs(v1=v1(t),i2=i2(t),DV1=diff(v1(t),t),
DI2=diff(i2(t), t),ec1[1]):
> varestado:={v1(t), i2(t)}:
estadoinicial:={v1(0)=2, i2(0)=1}:
>estado1:=dsolve(estadoinicial union ecestado,
varestado);
Resultan las soluciones en forma simbólica:
estado1 := i2 ( t ) C
e
R 2 k C ift
2RkC
2 R 2 k2 C2
RC
e
R 2 k C ift
2
2 R 2 k C2
R 2 C2
R 2 C2
( 2 ift L R 2 C ift
2 R 2 k C2
4LC
4LC)
R 2 C2
2 L)
2RC
4 L C R ift
(L C
1
4
R 2 k2 C2 2 R 2 k C2 R 2 C2 4 L C )
2 2 2
2
2
R k C 2R kC
2LC
2RkC
R 2 k2 C2
R 2 k2 C2
R 2 k2 C2
2 R 2 k C2
(R k C R C
(R k C
R 2 k2 C2 2 R 2 k C2 R 2 C2 4 L C )
2 2 2
2
2
2 2
R k C 2R kC R C 4LC)t
2LC
(R k C R C
R 2 k2 C2
1
(R k C R C
4
4LC)t
( 2 ift L R 2 C ift
2RC
R 2 k 2 C 2 2 R 2 k C 2 R 2 C 2 4 L C R ift
2 R 2 k C2
2 R 2 k C2
2 2
R C
R 2 C2
R 2 C2
Profesor Leopoldo Silva Bijit
4LC
4LC)
2 L)
(L C
ift , v1( t )
1
2
30/12/2009
22
Algoritmos para el análisis de redes.
2 2
2
2
C (R C k 2 R C k R C 4 L) )
2LC
t (R k C R C
e
R 2 k C ift 2 R k C
( 2 ift L R 2 C ift 2 R C
R 2 k 2 C2 2 R 2 k C2 R 2 C2 4 L C R ift
2 R 2 k2 C2 2 R 2 k C2 R 2 C2 4 L C
1
R 2 k2 C2 2 R 2 k C2 R 2 C2 4 L C
2
2 2
2
2
C (R C k 2 R C k R C 4 L) )
2LC
t (R k C R C
e
R 2 k C ift
R 2 k2 C2
2RkC
2 R 2 k2 C2
R 2 k2 C2
2 R 2 k C2
R 2 C2
2 R 2 k C2
R 2 C2
2 L)
( 2 ift L R 2 C ift 2 R C
2 R 2 k C2
4LC
R 2 C2
4 L C R ift
2 L)
4LC
R ift
Si se desea efectuar cálculos numéricos, se asignan valores a
los datos. En el caso del ejemplo, se emplea una fuente
continua y una sinusoidal, para ilustrar lo general de la
solución.
> datos:={R=1, L=1, C=1, vf=2, ift=5*cos(2*t),k=3}:
>estado:=dsolve(estadoinicial union
eval(ecestado, datos), varestado);
Ahora se tienen soluciones específicas.
211
( 2 t t 3 ) 45 3
( 2t t
estado := { i2 ( t ) 2 e
e
73
146
2e
( 2t t 3)
45 3
73
211
146
225
( 2t
cos( 2 t ), v1( t ) e
73
65
70
cos( 2 t )
sin ( 2 t ) }
73
73
t 3)
e
45 3
73
( 2t t 3)
45 3
73
3)
211
146
e
45 3
73
211
146
( 2t
211
146
3
t 3)
3
130
sin ( 2 t )
73
45 3
73
211
146
Si se desean formas numéricas, se evalúa con flotantes:
> assign(estado):
> evalf(i2(t));
( 0.267949192 t )
0.673331677 e
1.408860100 e
3.082191781 cos( 2. t )
Profesor Leopoldo Silva Bijit
( 3.732050808 t )
30/12/2009
1.780821918 sin ( 2. t )
Teoría de Redes Eléctricas.
23
Si se desea visualizar las soluciones:
> plot({i2(t),v1(t)},t=0..10);
Figura 6. Formas de ondas.
2.4. Solución de las ecuaciones
diferenciales usando SPICE.
1
2
ic
Vf
If(t)
VC
R
4
C
F1=kic
L
0
3
Figura 7. Diagrama de la red.
2.4.1. Netlist y estímulos transitorios.
Con: vf(t)=2, if(t)=5cos(2t), R=1, C=1, L= 1, vC(0)=2, iL(0)=1,
k=3.
El estímulo SIN (<ioff> <iampl> <freq> <td> <df> <phase>),
puede programarse para generar el estímulo sinusoidal,
empleando:
Profesor Leopoldo Silva Bijit
30/12/2009
24
Algoritmos para el análisis de redes.
f
2 f
1
2
0.31832
Como la excitación es coseno, al seno se le suman 90 grados
de desfase. Con offset cero ioff=0, sin retardo td=0, y sin
amortiguamiento exponencial df=0)
Resulta: SIN(0, 5, 0.31832 , 0, 0, 90)
Para la fuente de corriente controlada por corriente F1, se
define una fuente de tensión continua de 0 volts, Vc, que se
emplea para definir la corriente de control.
2.4.2. Análisis transitorio
*
R 231
C 4 0 1 IC=2
L 3 0 1 IC=1
Vf 1 2 2
If 1 0 SIN(0, 5, 0.31832 , 0, 0, 90)
F1 2 3 Vc 3
Vc 2 4 DC 0
.TRAN 0s 10s 0 0.1s
.probe
.end
2.4.3. Formas de ondas.
El modo transitorio de análisis genera la solución como
series de puntos, con los que pueden dibujarse las formas de
ondas.
Profesor Leopoldo Silva Bijit
30/12/2009
Teoría de Redes Eléctricas.
25
Figura 8. Variables de estado, en el tiempo.
3. Solución numérica de sistemas de
ecuaciones diferenciales.
Una ecuación diferencial de primer orden puede resolverse
numéricamente mediante integración.
Si se tiene:
dr (t )
dt
Entonces:
F (t )
t
r (t )
r (0)
F ( )d
0
F (t ) considera la variación de r(t) y de las excitaciones que
producen la respuesta r(t).
Una manera simple y aproximada de realizar la integración
es calcular el área mediante la suma de rectángulos, que
estudiaremos como el método de Euler.
Una mejor aproximación se logra sumando trapecios con la
regla de Simpson; y si se desea mayor precisión y la no
acumulación de errores se emplea aproximación por segmentos
polinomiales mediante el método de Runge-Kutta.
Profesor Leopoldo Silva Bijit
30/12/2009
26
Algoritmos para el análisis de redes.
3.1. Formulación de ecuaciones de estado.
La formulación de las ecuaciones de una red eléctrica en
términos de las variables de estado permite encontrar la
solución de un sistema de ecuaciones diferenciales de primer
orden en el dominio del tiempo. La solución numérica, que
veremos a continuación, puede aplicarse a sistemas no lineales.
La representación se logra con un sistema de ecuaciones
diferenciales de primer orden:
dx
dt
Ax Bu
Donde x es el vector de estado, u es el vector de entrada o de
excitaciones.
El resto de las variables del sistema puede expresarse en
términos del estado, según:
y Cx Du
Donde y es el vector de salida.
A se denomina matriz de estado del sistema, B es la matriz
de entrada, C es la matriz de salida, y D se denomina matriz de
alimentaciones directas (feedforward).
Veamos un ejemplo:
v(t)
a
i(t)
C
R
vL
L
b
Figura 9. Red RLC.
Formulando las ecuaciones de estado, se obtienen:
Profesor Leopoldo Silva Bijit
30/12/2009
Teoría de Redes Eléctricas.
27
v Ri L
i C
di
dt
0
dv
dt
Con las condiciones iniciales: v(0) e i(0).
Del modelo de ecuaciones de estado pueden obtenerse las
ecuaciones diferenciales, de mayores órdenes, para cada una de
las variables de la red, por ejemplo para el voltaje en el
condensador, se obtiene eliminando i:
v RC
dv
dt
d 2v
dt 2
R dv
L dt
Arreglando:
LC
d 2v
dt 2
0
1
v 0
LC
Con C=1, R=2/3 y L=1/3, v(0)=1, i(0)=0, se tiene una
ecuación diferencial de segundo grado, sin excitaciones:
v 2v 3v 0
v(0) 1,
v(0)
1
i(0) 0
C
Volviendo al problema de calcular soluciones numéricas en
el dominio de tiempo, se desea obtener la solución v(t) para el
intervalo desde t=0 hasta t=6.
A partir de las ecuaciones de estado, con los valores de los
parámetros, se tiene:
dv
dt
di
dt
i
3v 2i
Expresando matricialmente, se obtiene la matriz de estado A:
Profesor Leopoldo Silva Bijit
30/12/2009
28
Algoritmos para el análisis de redes.
dv
dt
di
dt
0
3
1 v
2 i
3.2. Método de Euler.
A partir de la expansión en serie de Taylor, para una variable
escalar y, se tiene:
y(t
t)
y(t )
dy(t )
t
dt
1 dy 2 (t ) 2
t ....
2 dt 2
La relación anterior, puede generalizarse considerando y
como un vector. Pueden calcularse, aproximadamente, los
valores en el instante siguiente (k+1) a partir de los valores en
el instante k-ésimo, mediante:
vk
ik
1
1
vk
ik
dv(tk )
t
dt
di(tk )
t
dt
Este procedimiento iterativo se denomina esquema simple de
Euler.
Los valores de las derivadas, en un instante determinado, se
obtienen mediante la matriz de estado.
A partir de la ecuación de estado se determina el valor de las
derivadas en un punto.
dv(0)
dt
di (0)
dt
Sea
t
mediante:
0
3
1 v(0)
2 i(0)
0
3
1 1
2 0
0
3
0.1 , entonces los valores en t=0.1 se obtienen
Profesor Leopoldo Silva Bijit
30/12/2009
Teoría de Redes Eléctricas.
29
v(0.1)
i(0.1)
dv(0)
dt
di(0)
dt
v(0)
i(0)
t
Numéricamente, se obtiene:
v(0.1)
i (0.1)
1
0
0
0.1
3
1
0.3
Para el siguiente punto, se efectúan los siguientes cálculos:
t
0.2
dv(0.1)
dt
di (0.1)
dt
v(0.2)
i (0.2)
0
3
1
0.3
1
2
v(0.1)
i (0.1)
0.3
0.1
2.4
0
3
1
2
1
0.3
0.3
2.4
0.97
0.54
Y así sucesivamente, hasta llegar al valor final de t deseado.
La solución exacta de la ecuación de segundo orden,
obtenida por un método analítico es:
v 2v 3v 0
v(0) 1, v(0) 0
1
sin 2t )
2
v(t ) e t (cos 2t
3.3. Solución analítica.
El siguiente segmento Maple, obtiene la solución de las
ecuaciones de estado y los diagramas temporales de v(t) e i(t).
Profesor Leopoldo Silva Bijit
30/12/2009
30
Algoritmos para el análisis de redes.
v(t
)
i(t)
Figura 10. Solución transitoria analítica.
> restart; with(plots):
> ci:= {v(0)=1,i(0)=0};
ci := { v( 0 )
1, i( 0 )
0}
> ed:={diff(v(t),t)=i(t),diff(i(t,t)=-2*diff(v(t),t)3*v(t)};
ed := {
d
v( t )
dt
i( t ),
d
i( t )
dt
2
d
v( t )
dt
3 v( t ) }
El conjunto de ecuaciones diferenciales y de condiciones
iniciales, se resuelve para el conjunto de funciones que se
coloca como último argumento (El conjunto: v(t), i(t) en este
caso). dsolve resuelve un conjunto de ecuaciones diferenciales.
> sol:= dsolve(ed union ci, {v(t),i(t)});
sol := { v( t )
1 (
e
3
t)
3
2 sin( 2 t ) 3 cos( 2 t ) , i( t )
2
3 (
e
2
t)
2 sin( 2 t ) }
> assign(sol);
Se almacena gráfica de v(t) en la variable exacta; y se
efectúan las gráficas de v e i, que se muestran en la Figura 2.
> exacta:=plot(v(t), t=0..6, thickness=2, color=red):
> plot([v(t),i(t)],t=0..6,thickness=2,color=[red, blue]);
3.4. Solución numérica.
La obtención de una solución numérica puede obtenerse de la
siguiente forma:
Primero se establecen los valores iniciales de las variables:
Profesor Leopoldo Silva Bijit
30/12/2009
Teoría de Redes Eléctricas.
> v[0]:=1: i[0]:=0: t[0]:=0:
31
Delta:=0.1:
La generación de los puntos se almacena en listas, usando
notación de arreglos. Las ecuaciones de recurrencia se
resuelven mediante una iteración.
Si Delta disminuye, la solución aproximada de Euler es más
exacta.
Se repite desde n igual 0 hasta 60 lo que está entre do y od,
mediante el comando for.
> for n from 0 to 60 do
t[n+1]:=t[n]+ Delta:
i[n+1]:=i[n]+(-3*v[n]-2*i[n])*Delta:
v[n+1]:=v[n]+i[n]*(Delta):
od:
di
dt
dv
dt
3v 2i
i
Se genera secuencia de puntos, como pares ordenados (t, v)
mediante seq.
> S:=[seq([t[k],v[k]], k=0..60)]:
La gráfica formada por los puntos de la lista S, se genera
empleando pointplot.
> puntos:=pointplot(S,symbol=circle):
Display muestra los dos gráficos simultáneamente.
> display(exacta, puntos);
Figura 11. Solución transitoria numérica.
La solución aproximada, por el esquema simple de Euler,
puede ser suficiente en muchos casos. Existen numerosos
métodos numéricos que dan mejores soluciones que el método
de Euler, cuando las variables son funciones que tienen
Profesor Leopoldo Silva Bijit
30/12/2009
32
Algoritmos para el análisis de redes.
crecimientos o cambios muy grandes entre los intervalos en que
se calculan los puntos.
En Sistemas Lineales se estudian métodos que permiten
pasar de la representación de variables de estado a funciones
de transferencia. Las funciones de transferencia modelan la
representación de sistemas en el dominio de la frecuencia.
Pueden
obtenerse
importantes
propiedades
del
comportamiento del sistema en el espacio de estado. Esto se
logra dibujando los valores de las variables de estado en
términos del parámetro tiempo.
La secuencia de puntos (v, i) se logra con:
> espacio:=[seq([v[k],i[k]],k=0..60)]:
> pointplot(espacio,symbol=circle);
t=
t=0
Figura 12. Espacio de estado.
4. Redes No Lineales.
Las redes que se estudian en cursos básicos de electrónica
usan componentes no lineales; para su análisis se requiere
disponer de una herramienta especializada para este tipo de
redes.
Profesor Leopoldo Silva Bijit
30/12/2009
Teoría de Redes Eléctricas.
33
Se ilustra el uso de SPICE en diferentes situaciones de
análisis de redes sencillas en base a diodos y transistores.
SPICE posee modelos internos con las características no
lineales, tanto estáticas como dinámicas, de diversas
componentes semiconductoras, incluidos diodos y transistores.
Los modelos pueden ser ajustados cambiando sus parámetros
internos.
4.1. Redes con diodos.
4.4.1. Característica.
Una configuración simple permite visualizar la característica
del modelo de un diodo.
1
Vin
+
D1
0
Figura 13. Característica exponencial de diodo.
Característica exponencial
*diodo
Vin 1 0 DC 0
D1 1 0 mod1
.model modelo D (IS=1e-14 )
.DC Vin 0.60 0.85 .1
.probe I(D1)
.end
Al efectuar un análisis en modo DC se calcula la corriente en
el diodo para cada uno de los voltajes de los voltajes de entrada,
desde 0,65V hasta 0,85V, en incrementos de 0,1V. El comando
probe almacena los valores de la corriente en el diodo para los
diferentes valores del voltaje de entrada.
Profesor Leopoldo Silva Bijit
30/12/2009
34
Algoritmos para el análisis de redes.
Figura 14. Análisis DC.
Puede visualizarse el crecimiento exponencial aumentando el
barrido hasta 950 mV, el simulador muestra que la corriente
que circulará en el diodo es de tipo 15 A. Si se aumenta aún
más el voltaje en la fuente, el simulador calculará corrientes
enormes. Este sencillo ejemplo muestra que los analizadores de
redes no lineales deben emplearse con criterios adicionales,
para obtener resultados que puedan ser útiles en el laboratorio.
En cursos de electrónica se ilustran las mejores prácticas de
diseño empleando componentes como diodos y transistores;
ellas resumen la experiencia acumulada por los ingenieros y
diseñadores en muchos años de creativos aportes y constituyen
los criterios de diseño.
Puede refinarse el modelo propuesto, que ha idealizado la
fuente de tensión al asumir que éste no tiene una pequeña
resistencia interna, y también puede mejorarse el modelo del
diodo, considerando una pequeña resistencia interna.
Si se agrega en el modelo del diodo una resistencia serie de 1
ohm, RS=1, en la lista de parámetros del modelo, mediante:
.model modelo D (IS=1e-14 RS=1)
La nueva simulación se muestra en la Figura 15, si bien las
corrientes no son tan elevadas, podrían exceder las máximas
corrientes de conducción soportadas por el diodo. Los valores
de éstas dependen del tipo de diodo que se esté empleando; en
diodos rectificadores y de potencia las corrientes suelen ser
mucho mayores que las empleadas en dispositivos de
conmutación o que los usados en diseños con diodos de
pequeña señal.
Profesor Leopoldo Silva Bijit
30/12/2009
Teoría de Redes Eléctricas.
35
Figura 15. Efecto de la resistencia interna del diodo.
4.4.2. Diodo con resistencia limitadora de
corriente.
Un circuito que limita la máxima corriente que circula en un
diodo se muestra en la Figura 16.
2
1
Vin
+
R
D1
0
Figura 16. Resistencia para limitar la corriente en el diodo.
Limitación de corriente en diodo
Vi 1 0 2V
R 1 2 100 ; Resistencia serie.
D1 2 0 mod1
.model mod1 D (IS=1e-14 EG=0.7 RS=0.01 CJO=100pF)
*Comandos de análisis:
.DC Vi 0V 2.5V 10mV
.op
.probe
.end
El modelo contempla una pequeña resistencia serie del diodo
(RS) y un voltaje de EG=0,7V (bandgap voltage) que es típico en
diodos de silicio.
Profesor Leopoldo Silva Bijit
30/12/2009
36
Algoritmos para el análisis de redes.
Un cálculo simplificado de la corriente se logra asumiendo
que el diodo en conducción tiene un voltaje de 0,7 V, entonces:
I ( D1)
Vin 0, 7
R
2 0, 7
13 mA
100
Se ha calculado la corriente para Vin=2.
Los valores que da el comando .op, que calcula el punto de
operación, son: V(2) = 0,7211 e I(D1)= 1.279E-02 = 12,8 mA.
Nótese que .op considera Vi con el valor que ha sido definido
2V; las variaciones de Vi que se establecen en el comando DC
son para este comando.
El barrido DC, entrega la gráfica que se muestra en la Figura
17. Muestra 720 mV y 12,5 mA para Vin =2 V.
Figura 17. Corriente y Voltaje en el diodo.
4.4.3. Simulación paramétrica.
Puede visualizarse el efecto de cambiar un parámetro
mediante los comandos .param y .step. En el ejemplo se define
el valor del parámetro Rlim, por defecto en 100; luego en el
valor de la resistencia R, se coloca, entre paréntesis cursivos, el
parámetro Rlim. Finalmente se efectúan 5 simulaciones
variando en pasos de 100 el parámetro Rlim, a partir de un
valor inicial 100 y uno final de 500.
Simulación paramétrica
Profesor Leopoldo Silva Bijit
30/12/2009
Teoría de Redes Eléctricas.
37
* se analiza efecto de limitación de corriente.
.PARAM Rlim = 100
Vi 1 0 2V
R 1 2 {Rlim}
D1 2 0 mod1
.model mod1 D (IS=1e-14 RS=0.01 VJ=0.7 CJO=100pF)
.STEP PARAM Rlim 100, 500, 100
.DC Vi 500mV 2500mV 100mV
.probe
.end
Si la resistencia aumenta, la corriente disminuye, se
obtienen:
R=200
ohms
Figura 18. Simulación paramétrica.
4.4.5. Rectificador de media onda.
En la Figura 19, se muestra una red no lineal cuyo propósito
es rectificar una onda sinusoidal. En la resistencia de carga Rc,
circula corriente cuando el diodo conduce.
2
1
Vin
+
R
3
D1
Rc
0
Figura 19. Simulación transitoria.
Profesor Leopoldo Silva Bijit
30/12/2009
38
Algoritmos para el análisis de redes.
Media Onda
Vi 1 0 SIN(0, 10, 1, 0 , 0, 0)
R 1 2 100
D1 2 3 mod1
Rc 3 0 1000
.model mod1 D (IS=1e-14 CJO=100pF)
.tran 0 3 0.1ms
.probe
.end
Se ha utilizado un estímulo sinusoidal, sin offset, con
amplitud 10 y una frecuencia de 1 Hertz. Se efectúan cálculos
en el tiempo con incrementos de 0.1mseg desde 0 a 3 segundos,
mediante el comando .tran.
Figura 20. Respuesta transitoria.
4.4.5. Red no lineal dinámica.
Si agregamos un condensador en paralelo con la resistencia
de carga se mejora el valor medio de la señal rectificada. Para
lograr esto, el condensador se descarga cuando el diodo no
conduce; si la descarga es lenta, mayor será el valor medio.
El modelo matemático es una red no lineal dinámica, que
difícilmente puede ser estudiada con modelos para papel y
lápiz.
Profesor Leopoldo Silva Bijit
30/12/2009
Teoría de Redes Eléctricas.
2
1
Vin
+
39
R
3
D1
Rc
C
0
Figura 21. Simulación transitoria con condensador.
Media Onda con condensador.
Vi 1 0 SIN(0, 10, 1, 0 , 0, 0)
R 1 2 100
D1 2 3 mod1
Rc 3 0 1000
C 3 0 1000u
.model mod1 D (IS=1e-14 CJO=100pF)
.tran 0 3 0.1ms
.probe
.end
Cuando el diodo conduce, se carga el condensador; cuando
el diodo no conduce, el condensador se descarga a través de la
resistencia.
Figura 22. Efecto del condensador.
Puede efectuarse una simulación paramétrica para el
dimensionamiento del condensador.
Profesor Leopoldo Silva Bijit
30/12/2009
40
Algoritmos para el análisis de redes.
4.4.6. Característica
circuitos con diodos.
+
transferencia
de
2
1
Vin
de
R
D2
D1
3
4
V1
V2
0
Figura 23. Limitador en base a diodos.
Limitador con diodos.
Vi 1 0 5V
R121
D1 2 3 mod1
V1 3 0 10V
D2 4 2 mod1
;de ánodo a cátodo
V2 4 0 6
Ro 2 0 100
.model mod1 D (IS=1e-14 RS=.01 VJ=0.7V CJO=100pF)
.DC Vi 0V 15V 1V
.probe
.end
El barrido DC, permite obtener la característica de
transferencia de un circuito limitador en base a diodos.
Cambiando los valores de V1 y V2, se modifica la característica.
Figura 24. Transferencia V(2)/V(1).
Profesor Leopoldo Silva Bijit
30/12/2009
Teoría de Redes Eléctricas.
41
4.2. Redes con transistores.
4.2.1. Modelos del transistor.
Lo primero es visualizar las características no lineales del
transistor. Es un dispositivo de tres terminales, y sus
características suelen representarse por las curvas:
Ib(Vbe, Vce) y Ic(Vce, Ib)
Debido a que son superficies en un espacio tridimensional,
suelen dibujarse empleando Vce como parámetro para la
característica de entrada, e Ib para la característica de salida.
4.2.2. Característica de entrada.
1
2
NPN
+
+
Vbe
Vce
0
Figura 25. Medición Ib(Vbe) con Vce constante.
Para el transistor bipolar se emplea el modelo npn.
Características Ib(Vbe) en BJT
Vce 1 0 DC 10V
Vbe 2 0 DC 0;
* CBE
Q1 1 2 0 transistor
.model transistor NPN (Is=1.8104e-15A Bf=100 VAf=35V)
*Análisis DC
*Vbe varía desde 0.7V a 0.85V en incrementos de 10mV
.DC Vbe 700mV 850mV 10mV
.probe
; se visualiza la corriente en la base
.end
Profesor Leopoldo Silva Bijit
30/12/2009
42
Algoritmos para el análisis de redes.
Figura 26. Característica Ib(Vbe) con Vce constante.
Si se efectúa una simulación paramétrica variando Vce, se
visualiza que esta característica no varía prácticamente con
Vce.
4.2.3. Característica de salida.
1
2
NPN
+
Ib
Vce
0
Figura 27. Medición Ic(Vce) con Ib constante.
Características Ic(Vce) en BJT
Vce 1 0 DC 0V
Ib 0 2 DC 10uA ; SE INYECTA CORRIENTE CONSTANTE EN LA BASE
* CBE
Q1 1 2 0 transistor
.model transistor NPN (Is=1.8104e-15A Bf=100 VAf=35V)
* Análisis DC Vce
.DC Vce -2V +10V 100mV
.probe
; se visualiza la corriente en el colector
.end
Profesor Leopoldo Silva Bijit
30/12/2009
Teoría de Redes Eléctricas.
43
Figura 28. Característica de salida Ic(Vce) con Ib constante.
Para estudiar la influencia de la corriente de base, en la
característica de salida, se efectúa una simulación paramétrica.
Características Ic(Vce) en BJT con Ib como parámetro.
.PARAM IbVAL = 10uA
Vce 1 0 DC 0V
Ib 0 2 DC {IbVal} ;
.step param IbVal 10uA 2mA 500ua
* CBE
Q1 1 2 0 transistor
.model transistor NPN (Is=1.8104e-15A Bf=100 VAf=35V)
.DC Vce -2V +10V 100mV
.probe
; se visualiza la corriente en el colector
.end
Se aprecia para corrientes muy bajas en la base que la
corriente en el colector es cero (zona de corte). Para valores
mayores de la corriente de base, la de colector es tipo 100 veces
mayor que la de base, para voltajes Vce mayores que 0.7 (zona
lineal). También se aprecia que, prácticamente independiente
de la corriente de base, el transistor se comporta como una
fuente de voltaje de 0,2 V (zona de saturación); en la Figura 29,
esta zona está representada por los segmentos prácticamente
verticales en Vce=0,2.
Profesor Leopoldo Silva Bijit
30/12/2009
44
Algoritmos para el análisis de redes.
Ib=1,5 mA
Ib=1,0 mA
Figura 29. Influencia de la corriente de base.
4.2.4. Punto de operación.
Aplicando método de mallas, a la red de la Figura 30, se
tienen:
Vce
Rc I c
Vcc
Vb
I b Rbp
Vbe
La intersección de estas rectas con las características no
lineales de entrada y de salida del transistor son la solución del
sistema no lineal de ecuaciones; los valores de la solución
suelen denominarse punto de operación. La solución
simultánea son los cuatro valores: (Ib,Vb) (Ic, Vce); un punto en
la característica de entrada, el otro en la de salida.
De la familia de rectas de salida del transistor, debe
considerarse sólo la correspondiente al valor actual de la
corriente en la base. La resistencia Rbp y Vb fijan la corriente
de base.
Profesor Leopoldo Silva Bijit
30/12/2009
Teoría de Redes Eléctricas.
45
4
+Vcc
Rc
3
2
NPN
Rbp
6
+
Vb
0
Figura 30. Punto de operación.
Se estudia la variación del punto de operación, cambiando
los valores de la fuente de polarización de la base Vb.
Punto de operación
Vcc 4 0 10
Vcb 6 0 10
Rc 4 3 1k
Rbp 6 2 19.85k
Q1 3 2 0 npn-trans
.DC Vcb .45 +5.V 10mV ;
.model npn-trans npn (is=2e-15 bf=50 vaf=200)
.op ; calcula punto operación
.probe
.end
El cálculo .op obtiene el punto de operación para los valores
de las fuentes y resistencias, se obtienen:
V(2)=0.7574 V(3)=0.0959 V(4)=10.0000 V(6)=10.0000
La variación de Vb muestra el lugar geométrico de los puntos
de operación del voltaje colector-emisor. En la Figura 31, se
muestran las zonas de funcionamiento denominadas: corte,
lineal y saturación. La zona lineal es la comprendida entre las
zonas de corte y saturación.
Puede estudiarse las variaciones del punto de operación
variando las resistencias de polarización.
Profesor Leopoldo Silva Bijit
30/12/2009
46
Algoritmos para el análisis de redes.
corte
Zona lineal
saturación
Figura 31. Variación del punto de operación.
En amplificadores se ubica el punto de trabajo en la zona
lineal; en dispositivos de conmutación el punto de operación se
alterna entre las zonas de corte y saturación.
La Figura 32, ilustra en diversas escalas para la magnitudes,
la variación de la ganancia de corriente del colector versus la
corriente de la base, y las corrientes de base y colector.
Figura 32. Corrientes en las zonas.
Profesor Leopoldo Silva Bijit
30/12/2009
Teoría de Redes Eléctricas.
47
Nótese la variación prácticamente lineal de la corriente de
base, y la abrupta caída de la ganancia en la zona de
saturación; lo cual se refleja en la saturación de la corriente de
colector. Se denomina saturación ya que la corriente de colector
no sigue aumentando a pesar del aumento de la corriente de
base.
4.2.5. Característica de transferencia.
Colocar al transistor en un punto de operación a través de
las mallas de polarización, permite obtener la característica de
transferencia entre el voltaje de salida y el voltaje o señal de
entrada Vin.
4
+Vcc
Rc
3
Rb
2
1
NPN
Rbp
+
Vin
6
+
Vb
0
Figura 33. Característica de transferencia.
Característica de transferencia
Vcc 4 0 10
*Vcb 6 0 5.45 ; desplaza característica. Fijando umbrales.
Vcb 6 0 10
Rc 4 3 1k
Rbp 6 2 19.85k ; 19.85k a Vcc produce Vo=5 para Vi=0
Rb 1 2 2k
Q1 3 2 0 npn-trans
Vin 1 0
.DC Vin -.5 +.5V 10mV ; calcula transferencia con barrido DC
.model npn-trans npn (is=2e-15 bf=50 vaf=200)
.op ;calcula punto operación
.probe
.end
Las variaciones de Rbp o Vcb desplazan la característica.
Profesor Leopoldo Silva Bijit
30/12/2009
48
Algoritmos para el análisis de redes.
Figura 34. Característica Vce versus Vin.
4.2.6. Pequeña señal.
De la característica de la Figura 34, puede observarse que si
se elige una señal sinusoidal de entrada de amplitud no mayor
a 150 mV se tendrá en la salida una señal sinusoidal
amplificada, con offset de 5 V y una amplitud cercana a los
3,5V.
Podemos visualizar esto mediante una simulación
transitoria.
Pequeña señal alterna en la entrada.
Vcc 4 0 10
Vcb 6 0 10
Rc 4 3 1k
Rbp 6 2 19.85k ; 19.85k a Vcc produce Vo=5 para Vi=0
Rb 1 2 2k
Q1 3 2 0 npn-trans
Vin 1 0 SIN(0, 150mV, 1k, 0, 0, 0)
.tran 0 2.0m 0.1u
.model npn-trans npn (is=2e-15 bf=50 vaf=200)
.op ;calcula punto operación
.probe
.end
La Figura 35, muestra en escalas diferentes, los voltajes
sinusoidales de entrada y de salida. Observando con atención
los máximos y mínimos del voltaje de salida puede concluirse
Profesor Leopoldo Silva Bijit
30/12/2009
Teoría de Redes Eléctricas.
49
que se produce una pequeña distorsión debido a las no
linealidades del transistor.
Figura 35. Amplificación.
Obteniendo la transformada rápida de Fourier, se aprecia la
aparición de componentes de segunda armónica en el voltaje de
salida.
Segunda
Armónica
Figura 36. Distorsión de segunda armónica.
Si la amplitud de la señal de entrada se aumenta a 350mV,
la salida será claramente no sinusoidal. Debido a las no
linealidades de la característica de transferencia, el
amplificador genera nuevas frecuencias; en el caso del ejemplo,
en la Figura 38, se muestra que la salida contiene ahora una
componente importante de tercera armónica.
Profesor Leopoldo Silva Bijit
30/12/2009
50
Algoritmos para el análisis de redes.
Figura 37. Distorsión por no linealidad.
Figura 38. Distorsión de tercera armónica.
4.2.7. Amplificador.
De las experiencias acumuladas en el diseño de
amplificadores, un circuito típico es el que se muestra en la
Figura 39. Las razones de la configuración corresponden a
cursos de diseño electrónico; lo que nos interesa es analizar la
red no lineal con componentes dinámicas y sometida a
estímulos variables en el tiempo.
Las redes de polarización se separan de las señales alternas
de entrada y de salida mediante los condensadores C1 y C2.
Nótese que se ha agregado una resistencia en el emisor, y que
Profesor Leopoldo Silva Bijit
30/12/2009
Teoría de Redes Eléctricas.
51
se emplea solamente una fuente para la polarización del
transistor.
6
Rc
R1
Rs
2
C2
4
C1
1
+Vcc
7
3
NPN
R2
5
RL
RE
0
Figura 39. Amplificador en base a transistor bipolar.
Amplificador en base a transistor bipolar.
Vin 1 0 SIN(0V 0.1V 440Hz 0 0 0)
Rs 1 2 10
Rc 6 4 1K
R1 6 3 10K
R2 3 0 1K
Re 5 0 47
C1 2 3 10e-6
C2 4 7 10e-6
RL 7 0 1k
Vcc 6 0 dc 12
q1 4 3 5 npn-trans
.model npn-trans npn (is=2e-15 bf=100 vaf=200)
.op ;calcula punto operación
.tran 50us 6e-3s 0s 50us
.probe
.end
Se efectúa un análisis transitorio para generar la forma de
onda de la salida. El estímulo transitorio es una señal
sinusoidal en el rango de frecuencia audible.
La salida no tiene una componente continua, debido al
condensador C2. Se tiene también una pequeña distorsión, lo
cual puede observarse ya que el máximo positivo y negativo son
levemente diferentes.
Profesor Leopoldo Silva Bijit
30/12/2009
52
Algoritmos para el análisis de redes.
Figura 40. Entrada y salida sinusoidal.
Si se aumenta la frecuencia de la señal de entrada la
amplificación de la salida tenderá a disminuir. Para simular
esto puede modificarse los parámetros del transistor, para
considerar las capacidades de las junturas, o bien colocar un
condensador pequeño en paralelo con la resistencia de salida.
Un amplificador real tendrá un ancho de banda de frecuencias
a las cuales les proporciona una amplificación constante. Éste y
otros aspectos del diseño de amplificadores se cubren en cursos
de electrónica.
4.2.8. Inversor lógico.
El ejemplo anterior empleaba el transistor en la zona lineal
de operación. Otro importante uso de los transistores es en
circuitos de conmutación, en los cuales el transistor opera en
las zonas de saturación o corte.
4
+Vcc
Rc
Vc
3
Rb
1
NPN
2
C
0
Figura 41. Inversor simple.
Profesor Leopoldo Silva Bijit
30/12/2009
Teoría de Redes Eléctricas.
53
En estos dispositivos digitales, las entradas se consideran 0
ó 1 lógicos dependiendo de sus niveles.
Inversor simple
*
Rb 1 2 10k ; influye en el rise-time
Rc 4 3 4k ; si se aumenta Rc aumenta rise-time
C 3 0 10n ; condensador de la línea.
*
CBE
Q1 3 2 0 Q2N2222
Vcc 4 0 5V
Vs 1 0 PULSE(0V 3.5V 0s 1ms 1ms .5ms 4ms )
*Vs 1 0 SIN(0V 2.7V 100Hz 0 0 0)
.model Q2N2222 npn (BF=80 CJE=0.6p CJC=0.58p CJS=2.8p
+ VJE=0.715)
*Comandos de análisis:
.TRAN 0ms 3ms 0 0.01ms
.probe
.end
Se aplica un pulso en la entrada. Para voltajes de entrada
menores que 0,8V la salida es mayor que 3 V. Para voltajes de
entrada mayores que 1,2V la salida es menor que 0,3V.
Figura 42. Conmutación.
Cuando la salida está en 1 lógico el transistor está cortado;
cuando la salida está en 0 lógico el transistor está saturado. La
energía consumida por el transistor es mayor cuando la salida
conmuta de 1 a 0, pasando brevemente por la zona lineal.
Profesor Leopoldo Silva Bijit
30/12/2009
54
Algoritmos para el análisis de redes.
En los circuitos de conmutación es de interés dimensionar
las componentes de tal modo de fijar los umbrales del 1 y 0
lógicos dentro de los rangos deseados. También resulta
importante el retardo de la propagación de los cambios y los
tiempos de levantamiento y caída de los pulsos de la salida.
4.2.9. Inversor TTL.
Un diseño más elaborado de un inversor es el de la familia
lógica TTL (transistor-transistor-logic), que tiene transistores en
la entrada y en la salida.
4
R2
R1
2
7
Q2 D2
Q1
3
R3
Q3
5
1
D1
+Vcc
6
8
9
Q4
R4
0
Figura 43. Inversor TTL.
El principio de funcionamiento y las razones de la estructura
del inversor TTL corresponden a un curso de electrónica. El
análisis de la red no lineal puede realizarse mediante la
descripción del siguiente netlist:
Inversor TTL
*
R1 4 2 4k
R2 4 5 1.6k
R3 4 7 80k ;simulación sensible a esta resistencia. Puede
bajarse a 40K para pulsos. (130 Ohms)
R4 6 0 1k
Q1 3 2 1 Q2N2222
Q2 5 3 6 Q2N2222
Q3 9 6 0 Q2N2222
Q4 7 5 8 Q2N2222
Vcc 4 0 5V
Vs 1 0 PULSE(0V 3.5V 0s 4ms 4ms 2ms 12ms )
Profesor Leopoldo Silva Bijit
30/12/2009
Teoría de Redes Eléctricas.
55
*Vs 1 0 SIN(0V 2.7V 100Hz 0 0 0)
D1 8 9 mod1
D2 0 1 mod1
.model mod1 D (IS=1e-14 RS=16 CJO=100pF)
.model Q2N2222 npn (is=2e-15 bf=100 vaf=200)
.TRAN 10ms 20ms 0 0.01ms
.probe
.end
Figura 44. Conmutación inversor TTL.
4.3. Ejercicios propuestos.
Ejercicio 1.
Describir el netlist para analizar la red de la Figura 45.
Con Rc =4K, Rb = 10k, Vcc = 12V, Re=47
Con Vin=0 determinar Vb para que la salida tenga un offset
continuo de 6V.
Determinar la característica V(3)/Vin.
Determinar formas de ondas de V(1)-V(6), y V(3).
Profesor Leopoldo Silva Bijit
30/12/2009
56
Algoritmos para el análisis de redes.
5
+Vcc
Rc
3
Rb
1
+
+
2
NPN
6
Vin
Vb
4
RE
0
Figura 45. Ejercicio 1.
Ejercicio 2.
Dibujar el esquemático asociado al siguiente netlist.
Determinar que tipo de análisis se efectúa.
Dibujar las formas de ondas, de las entradas y la salida.
NAND TTL
* Simulacion de multiemisor
R1 4 2 4k
R2 4 5 1.6k
R3 4 7 50k ;
R4 6 0 1k
*se simula multiemisor con transistores Q11 y Q12 en paralelo.
Q11 3 2 11 Q2N2222
Q12 3 2 12 Q2N2222
Q2 5 3 6 Q2N2222
Q3 9 6 0 Q2N2222
Q4 7 5 8 Q2N2222
Vcc 4 0 5V
Vs1 11 0 PULSE(0V 3.5V 0s 2ms 2ms 2ms 14ms )
Vs2 12 0 PULSE(0V 3.5V 3ms 2ms 2ms 2ms 10ms )
D1 8 9 mod1
.model mod1 D (IS=1e-14 RS=16 CJO=100pF)
.model Q2N2222 npn (is=2e-15 bf=100 vaf=200)
.TRAN 10ms 20ms 0 0.01ms
.probe ; entradas v11 y v12, salida v9
.END
Profesor Leopoldo Silva Bijit
30/12/2009
Teoría de Redes Eléctricas.
57
Parámetros modelo transistor bipolar.
*Model: npn2 -- Gummel and Poon model
*IS = 14.34f [A] transport saturation current
*BF = 255.9 [ - ] ideal maximum forward beta
*VAF = 74.03 [V] forward Early voltage
*IKF = 0.2847 [A] forward-beta high-current roll-off "knee" current
*ISE = 14.34f [A] base-emitter leakage saturation current
*NE = 1.307 [ - ] base-emitter leakage emission coefficient
*BR = 6.092 [ - ] ideal maximum reverse beta
*IKR = 0 [A] corner for reverse-beta high-current roll-off
*RB = 10 [] zero-bias (maximum) base resistance
*RC = 1 [] collector ohmic resistance
*CJE = 22.01p [F] base-emitter zero-bias p-n capacitance
*VJE = 0.75 [V] base-emitter built-in potential
*MJE = 0.377 [ - ] base-emitter p-n grading factor
*CJC = 7.306p [F] base-collector zero-bias p-n capacitance
*VJC = 0.75 [V] base-collector built-in potential
*MJC = 0.3416 [ - ] base-collector p-n grading factor
*FC = 0.5 [ - ] forward-bias depletion capacitor coefficient
*TF = 411.1p [s] ideal forward transit time
*XTF = 3 [ - ] transit time bias dependence coefficient
*VTF = 1.7 [V] transit time dependency on VBC
*ITF = 0.6 [A] transit time dependency on IC
*TR = 46.91n [s] ideal reverse transit time
*XTB = 1.5 [ - ] forward and reverse beta temperature coefficient
5. Algoritmos
lineales.
para
análisis
de
redes
no
SPICE es una aplicación muy útil para el análisis de redes no
lineales dinámicas en su modo .tran, para análisis transitorio.
Se desarrolla a continuación los procedimientos matemáticos
que están en el interior de SPICE, para resolver sistemas
simultáneos de ecuaciones no lineales, estos algoritmos se
muestran en forma simplificada a través de programas Maple.
Profesor Leopoldo Silva Bijit
30/12/2009
58
Algoritmos para el análisis de redes.
5.1. Formulación de ecuaciones no lineales.
2
1
Vin
R
+
D1
0
Figura 46. Diodo no lineal con resistencia serie.
La ecuación no lineal de equilibrio del diodo es:
I s (ev /Vt 1)
id
Vt es el voltaje térmico del diodo. Vt = KT/q, donde K es la
constante de Boltzmann, T es la temperatura absoluta (300
grados Kelvin temperatura ambiente), y q es la carga de un
electrón. Vt toma valor cercano a 0.026 Volts a temperatura
ambiente. Is es la corriente inversa de saturación y un valor
típico para este parámetro es 10-14 A.
El modelo del diodo es simplificado. En la formulación del
modelo matemático, basado en consideraciones de la física de
semiconductores, no se representan, entre otros, los efectos
capacitivos ni el voltaje inverso de ruptura.
Aplicando método nodal, a la red de la Figura 46, se obtiene:
Vin
Rid
v
Dados Vin , R , y los parámetros I s , Vt del diodo, se requiere
calcular v .
Eliminando id de las ecuaciones anteriores, se obtiene la
ecuación no lineal, en términos del voltaje de nodo.
f (v) Vin
RI s (ev /Vt 1) v 0
Profesor Leopoldo Silva Bijit
30/12/2009
Teoría de Redes Eléctricas.
59
La solución de f (v) 0 , puede ser difícil de encontrar
analíticamente, pero como veremos es sencilla de resolver
iterativamente.
5.2. Método de Newton-Raphson.
Para resolver f ( x)
0 , se parte de un valor x0 y se genera
una serie de iteraciones xi que se acerquen a la solución x s ,
donde f ( xs ) 0 .
En cursos de análisis numérico se responden las preguntas:
¿Cuándo la secuencia xi converge a la solución correcta?
¿Cuán rápido se converge? ¿La convergencia depende del
intento inicial x0 ? ¿Cuándo detener las iteraciones?.
El método de Newton-Raphson consiste en reemplazar,
mediante la expansión de Taylor, la función por su versión
lineal, en torno a la solución:
f ( x)
f ( xs )
df
( xs )( x xs )
dx
Para un punto cualquiera se obtiene:
f ( xk 1 )
f ( xk )
df
( xk )( xk
dx
1
xk )
Efectuando: f ( xk 1 )
0 , se obtiene la fórmula de la iteración
de Newton-Raphson, despejando xk 1 :
xk
1
xk
df
( xk )
dx
1
f ( xk )
Podemos interpretar la fórmula de la iteración, planteando la
relación anterior en x0 , y calculando x1 . Situación que se
ilustra en la Figura 47.
Profesor Leopoldo Silva Bijit
30/12/2009
60
Algoritmos para el análisis de redes.
f(x)
f(x0)
f(x1)
xs
0
x2
x1
x0
Figura 47. Iteración Newton-Raphson.
Resulta, de la interpretación gráfica de la derivada en x0 :
tg ( 0 )
df
( x0 )
dx
f ( x0 )
x0 x1
Despejando x1 , se obtiene el primer valor de aproximación
del método de Newton-Raphson:
x1
x0
df
( x0 )
dx
1
f ( x0 )
Nótese que f ( x1 ) no es cero, lo cual implica que x1 es una
aproximación de x s . También debe notarse que para calcular la
siguiente aproximación deben calcularse la función y la
derivada en el punto anterior.
El proceso debe repetirse hasta que: xk
1
xk
tolerancia
Donde el valor de tolerancia debe ser un valor lo
suficientemente pequeño, para que la solución se considere
aceptable. Con números reales de precisión simple (float en C),
un valor razonable de tolerancia es 10-6, que es el valor del
número real más pequeño representable, en el formato interno
normalizado IEEE754.
Si el valor inicial es adecuado conviene limitar el número
máximo de iteraciones, de este modo si no existe convergencia
se asegura que el algoritmo termine.
Profesor Leopoldo Silva Bijit
30/12/2009
Teoría de Redes Eléctricas.
61
También puede verificarse que la ordenada en los puntos
sucesivos esté dentro de cierto rango:
f ( xk 1 )
tolerancia
Emplearemos el método anterior para calcular, usando
Maple, el punto de operación para el circuito de la Figura 46.
5.4. Implementación Maple de NewtonRaphson.
Se definen los parámetros de la red no lineal:
> restart; with(plots):
> Vin:=2: R:=100: Is:=1e-14: Vt:=.026: id:=Is*(exp(v/Vt)-1):
Se calcula la función f(v)=0 y la derivada de f respecto a v.
> f:=Vin-R*id-v: df:=diff(f,v):
La característica del diodo, con la ordenada en mA, se
obtiene con:
> plot(1000*id, v=0.6..0.8, thickness=2);
Figura 48. Característica diodo no lineal.
Los valores que da el comando .op, de SPICE, que calcula el
punto de operación, son: V(2) = 0,7211 e I(D1)= 1.279E-02 =
12,8 mA.
Se efectúa un gráfico detallado de f(v), en la zona de solución,
mediante:
> plot(f,v=0.72..0.73,thickness=2);
Profesor Leopoldo Silva Bijit
30/12/2009
62
Algoritmos para el análisis de redes.
Se obtiene:
Figura 49. Punto de operación.
Se procede ahora a implementar el algoritmo de NewtonRaphson. Se ha puesto un límite de 100 iteraciones y una
tolerancia de 10-8. Se emplea la fórmula:
vn
1
vn
f (v vn ) /
df
(v vn )
dx
> v[0]:=2: nmax:=100: tolerancia:=1e-8:
Se repite desde n igual 0 hasta nmax lo que está entre do y
od, mediante el comando for.
El break, dentro del if, detiene las iteraciones. Note el uso del
then, y del fi, con que termina el if.
> for n from 0 to nmax do
v[n+1]:=v[n]-subs(v=v[n],f)/subs(v=v[n],df);
if abs( v[n+1] - v[n] ) < tolerancia
then
# solución dentro de la tolerancia
break ;
fi ;
od:
Al salir del lazo for, v[n+1] contiene el valor de la última
iteración, siendo la solución buscada.
La secuencia de valores de v, para acercarse a la solución,
pueden visualizarse colocando un punto y coma en lugar de los
dos puntos, en el comando siguiente:
> S:=[seq([k,v[k]],k=0..n+1)]:
Profesor Leopoldo Silva Bijit
30/12/2009
Teoría de Redes Eléctricas.
63
Una gráfica de los valores de v calculados en cada paso de la
iteración, se logra con:
> pointplot(S,symbol=circle);
Figura 50. Convergencia hacia la solución.
5.5. Punto de operación.
El valor de la solución obtenida, se despliega mostrando el
voltaje y la corriente en el diodo, mediante:
> v[n+1];eval(id,v=v[n+1]);
.7247286818
.01275271318
Valor de voltaje que coincide con el cruce por cero de la
gráfica de la Figura 4; y también con el punto de operación
obtenido con .op en SPICE.
El método de Newton-Raphson está incorporado en Maple,
mediante el comando fsolve, se obtiene prácticamente igual
solución a la anterior, ejecutando simplemente:
> fsolve(f);
.7247286819
El algoritmo fsolve de Maple considera refinaciones del
algoritmo anterior que se ha descrito en forma simplificada.
El análisis DC repite el cálculo anterior para diferentes
valores de Vin.
Profesor Leopoldo Silva Bijit
30/12/2009
64
Algoritmos para el análisis de redes.
5.6. Análisis DC.
Se implementa el comando de Spice:
.DC Vi 0V 2.5V 25mV
Empleando el comando fsolve de Maple.
El algoritmo para efectuar un barrido DC, calculando los
puntos de V(2) y la corriente en el diodo Id, para los voltajes
Vin desde 0 a 2.5V, en incrementos de 25 mV, se logra con:
> restart;with(plots):
> R:=100:Is:=1e-14:Vt:=.026:id:=Is*(exp(v/Vt)-1):
> f:=Vini-R*id-v:
> Vin[0]:=0:DeltaV:=0.025:nmax:=2.5/DeltaV:
> for n from 0 to nmax do
V2[n]:=fsolve(subs(Vini=Vin[n],f)):
Id[n]:=eval(id,v=V2[n]):
Vin[n+1]:=Vin[n]+DeltaV;
od:
Las trazas se confeccionan mediante las secuencias:
> S1:=[seq([Vin[k],1000*Id[k]],k=0..nmax)]:
S2:=[seq([Vin[k],V2[k]],k=0..nmax)]:
> p1:=pointplot(S1,symbol=circle,color=red):
p2:=pointplot(S2,symbol=circle,color=blue):
display(p1);display(p2);
Nótese que se almacenan los puntos (Vin, Id), y que la gráfica
de la corriente se expresa en miliamperes.
Figura 51. Corriente en el diodo en [mA] versus Vin.
Profesor Leopoldo Silva Bijit
30/12/2009
Teoría de Redes Eléctricas.
65
Figura 52. Voltaje en el diodo versus Vin.
Esta es la forma en que SPICE realiza los cálculos en forma
interna, pero con algoritmos más eficientes.
5.7. Generalización
ecuaciones no lineales.
para
sistemas
de
Para un sistema de ecuaciones no lineales, se emplea la
expansión de Taylor para varias variables.
La expansión es una linealización en torno a la solución:
F ( x)
F ( xs ) J ( xs )( x xs )
Las cantidades F ( x ) y ( x
xs ) se expresan como vectores, y
J ( xs ) como una matriz, denominada Jacobiano.
Para un punto cualquiera, con aproximación de primer
orden, se tiene:
F ( xk 1 )
F ( xk ) J ( xk )( xk
1
xk )
Para entender la relación anterior se ilustra la forma que ella
toma para dos funciones de dos variables x1 y x2, se tiene:
Profesor Leopoldo Silva Bijit
30/12/2009
66
Algoritmos para el análisis de redes.
F1 ( x1k , x 2 k )
F1 ( x1k , x 2k )
F1 ( x1k 1 , x 2k 1 )
F1 ( x1k , x 2k )
x1
x2
x1k
1
x1k
F2 ( x1k 1 , x 2 k 1 )
F2 ( x1k , x 2k )
F2 ( x1k , x 2 k )
F2 ( x1k , x 2k )
x 2k
1
x 2k
x1
x2
Una explicación del cambio de la función de dos variables,
puede efectuarse considerando el plano tangente a la superficie,
en el punto (x10, x20) que pasa también por el punto (x1 1, x21).
Donde el punto 0 es el inicial, y el punto 1, se obtiene
pasando un plano tangente a la superficie en el punto 0.
x10
F1x1
x11
F1x2
x21
x1
x2
x20
Figura 53. Interpretación del Jacobiano de dos variables.
Aplicando la interpretación geométrica de las derivadas
parciales, se tienen:
)
F1 ( x10 , x 20 )
x1
F1x1
x10 x11
)
F1 ( x10 , x 20 )
x2
F1x 2
x 20 x 21
tg (
x1
tg (
x2
El cambio total de la función, resulta:
F1x1
F1x 2
F1 ( x10 , x20 )
( x10
x1
x11 )
F1 ( x10 , x20 )
( x 20
x2
x21 )
Aplicando el método de Newton-Raphson, que consiste en
asumir que el plano tangente pasa por el punto que es una
aproximación a la solución. Esto equivale a efectuar:
Profesor Leopoldo Silva Bijit
30/12/2009
Teoría de Redes Eléctricas.
67
F1 ( x1k 1 , x 2k 1 )
0
F2 ( x1k 1 , x 2k 1 )
Entonces la fórmula de iteración, resulta:
F1 ( x1k , x 2k )
F1 ( x1k , x 2 k )
x1
x2
x1k
1
x1k
F1 ( x1k , x 2k )
F2 ( x1k , x 2k )
F2 ( x1k , x 2 k )
x 2k
1
x 2k
F2 ( x1k , x 2k )
x1
x2
Finalmente, despejando el nuevo punto:
x1k
1
x1k
x 2k
1
x 2k
F1 ( x1k , x 2k )
F1 ( x1k , x 2k )
x1
F2 ( x1k , x 2k )
x2
F2 ( x1k , x 2k )
x1
x2
1
F1 ( x1k , x 2k )
F2 ( x1k , x 2k )
La que expresada en términos de vectores y la matriz inversa
del Jacobiano, resulta en general, para n variables:
xk
1
xk
J ( xk ) 1 F ( xk )
Una mejor visualización de la suma de los incrementos, se
logra observando los triángulos semejantes en la Figura 54.
Por el punto inicial (2, 2, 10) se pasa el plano z=2x+3y que
también pasa por el punto (0, 0, 0). Se han dibujado además
los planos de z constante, z=4 y z=6.
z
x
2,
z
y
3
Profesor Leopoldo Silva Bijit
z
x
x
4,
30/12/2009
z
y
y
6
68
Algoritmos para el análisis de redes.
Figura 54. Variación total de función de dos variables.
Volviendo al caso de dos variables, considerando el álgebra
de matrices, se tiene:
1 x
y
a b
c d
by dx
ad bc cx ay
1
Entonces las fórmulas de iteración de Newton-Raphson para
un sistema de ecuaciones no lineales de dos variables, resultan:
F1 (k )
F2 (k )
x2
F1 (k ) F2 (k )
x1
x2
F2 (k )
F1 (k ))
x2
F1 (k ) F2 (k )
x2
x1
F2 (k )
F1 (k )
x2
F1 (k ) F2 (k )
x1
x2
F1 (k )
F2 (k ))
x1
F1 (k ) F2 (k )
x2
x1
(
x1k
1
x1k
(
x 2k
1
x 2k
En caso de mayores órdenes debe invertirse el Jacobiano, o
alternativamente resolverse el sistema lineal de ecuaciones,
para las incógnitas xk 1 :
J ( xk )( xk
1
Profesor Leopoldo Silva Bijit
xk )
F ( xk )
30/12/2009
Teoría de Redes Eléctricas.
69
5.8. Sistema no lineal de dos ecuaciones.
2
1
Vin
R
+
D2 v2
D1
v1
3
i1
4
E1
i2
E2
0
Figura 55. Red no lineal con dos diodos.
Se tienen:
Vin
Ri
E1 v1
Vin
Ri
E2 v2
i i1 i2
Las ecuaciones exponenciales de los diodos, que se asumen
iguales son:
i1
I s (ev1 / Vt 1)
i2
I s (ev2 / Vt 1)
Eliminando las corrientes,
ecuaciones no lineales:
se
obtiene
el
F1 (v1 , v2 ) Vin
RI s (e v1 / Vt
e v2 / Vt ) E1 v1
F2 (v1 , v2 ) Vin
RI s (e v1 / Vt
ev2 /Vt ) E2 v2
sistema
0
0
Definiendo los valores de los parámetros, se tiene:
> restart;with(plots):
> datos:={R=1,Is=1e-14,Vt=.026,E1=10,E2=10,Vin=10.2}:
> F1:=Vin-R*Is*(exp(v1/Vt)-exp(v2/Vt))-E1-v1;
F1 := 11
R Is e
v1
Vt
e
v2
Vt
E1
v1
> F2:=Vin-R*Is*(exp(v1/Vt)-exp(v2/Vt))-E2+v2;
F2 := 11
R Is e
Profesor Leopoldo Silva Bijit
v1
Vt
e
v2
Vt
E2
30/12/2009
v2
de
70
Algoritmos para el análisis de redes.
Pueden obtenerse las gráficas de las funciones F1 y F2 en
términos de v1 y v2, mediante:
> rangos:= v1=-1..1,v2=-1..1:
p1:=implicitplot(eval(F1,datos),rangos,numpoints=10000,co
lor=red,thickness=2):p2:=implicitplot(eval(F2,datos),rang
os,numpoints=10000,color=blue,thickness=2):
display(p1,p2);
Se obtienen, para Vin =10.2 V:
Figura 56. Vin>10. D1 conduce, D2 no conduce.
Nótese que la solución se encuentra en el cuarto cuadrante,
debido a que el Vin es mayor que 10.
Cambiando el parámetro Vin a 9,8 V, se obtiene una
solución en el segundo cuadrante, como se muestra en la
Figura 57.
Figura 57. Vin<10. D1 no conduce, D2 conduce.
Profesor Leopoldo Silva Bijit
30/12/2009
Teoría de Redes Eléctricas.
71
5.9. Punto de operación.
La implementación de Newton-Raphson, para un sistema de
dos ecuaciones simultáneas de dos variables se logra mediante:
Se dan valores a los parámetros:
> Vin:=11:
> datos:={R=1,Is=1e-14,Vt=.026,E1=10,E2=10}:
Se calcula el Jacobiano:
> a:=diff(F1,v1):b:=diff(F1,v2):
c:=diff(F2,v1):d:=diff(F2,v2):
> det:=a*d-b*c:det1:=b*F2-d*F1:det2:=c*F1-a*F2:
> df1:=eval(det1/det,datos):df2:=eval(det2/det,datos):
Elección de punto de inicio.
> if Vin>10 then v1p[0]:=1: v2p[0]:=-1:
else v1p[0]:=-1: v2p[0]:=1:
fi:
De las Figuras 56 y 57, el punto para iniciar el proceso de
aproximación se elige adecuadamente, en puntos del segundo o
cuarto cuadrante.
Se repite desde n igual 1 hasta nmax lo que está entre do y
od, mediante el comando for. El break, dentro del if, detiene las
iteraciones. Note el uso del then, y del fi, con que termina el if.
> nmax:=100: tolerancia:=1e-8:
> for n from 0 to nmax do
v1p[n+1]:=v1p[n]+ eval(df1,{v1=v1p[n],v2=v2p[n]});
v2p[n+1]:=v2p[n]+ eval(df2,{v1=v1p[n],v2=v2p[n]});
if (abs(v1p[n+1]-v1p[n])<tolerancia)
and (abs(v2p[n+1]-v2p[n])<tolerancia)
then
# solución dentro de la tolerancia
break;
fi;
#printf("%f %f \n",v1p[n+1],v2p[n+1]);
od:
La solución para Vin dado, se obtiene con:
> v1p[n+1];v2p[n+1];
Profesor Leopoldo Silva Bijit
30/12/2009
72
Algoritmos para el análisis de redes.
Repitiendo esta iteración para diferentes valores de Vin, se
obtienen similares curvas de v1 y v2, a las generadas por
SPICE, que se muestran en la Figura 58.
v1(Vin)
v2(Vin)
Figura 58. Solución SPICE. Barrido DC 0<Vin<15.
5.10. Barrido DC.
Puede emplearse el siguiente segmento para obtener las
trazas de v1 y v2 en función de diferentes valores de Vin.
Se emplea fsolve, para resolver el sistema no lineal
simultáneo de ecuaciones. Debido a que este comando entrega
el resultado como un conjunto se requiere, antes de almacenar
los puntos, identificar la variable y su valor en cada conjunto;
para esto se emplean los operadores lhs y rhs (por left y right
hand side)
Usando instrucciones Maple, se implementa el comando de
SPICE: .DC Vi 0V 15V 75mV
> Vin[0]:=0: DeltaV:=0.2: nmax:=15/DeltaV:
datosDC:={R=1,Is=1e-14,Vt=.026,E1=10,E2=10,Vin=Vin[n]}:
> for n from 0 to nmax do
Cp[n]:=fsolve({eval(F1,datosDC),eval(F2,datosDC)},
{v1=0, v2=0});
if lhs(Cp[n][1])=v1
then V1[n]:=rhs(Cp[n][1])
else V2[n]:=rhs(Cp[n][1])
fi;
if lhs(Cp[n][2])=v2
Profesor Leopoldo Silva Bijit
30/12/2009
Teoría de Redes Eléctricas.
73
then V2[n]:=rhs(Cp[n][2])
else V1[n]:=rhs(Cp[n][2])
fi;
Vin[n+1]:=Vin[n]+DeltaV;
od:
Los siguientes comados generan las secuencias de puntos,
generan los gráficos en base a puntos y finalmente se
despliegan.
> S1:=[seq([Vin[k],V1[k]],k=0..nmax)]:
S2:=[seq([Vin[k],V2[k]],k=0..nmax)]:
> p1:=pointplot(S1,symbol=circle,color=red):
p2:=pointplot(S2,symbol=circle,color=blue):
display(p1,p2);
v1(Vin)
v2(Vin)
Figura 59. Solución Maple. Barrido DC 0<Vin<15.
Que es comparable con la Figura 58.
5.11. Transistor.
Las ecuaciones de Ebers-Moll para un transistor npn
consideran corrientes exponenciales en los diodos.
v /Vt
Ie
I EB 0 (e be
Ic
I CB 0 (e bc
Profesor Leopoldo Silva Bijit
v /Vt
1)
R c
I
1)
F e
I
30/12/2009
74
Algoritmos para el análisis de redes.
C
Ic
B
C
DR
FI e
Ib
DF
RI c
B
E
Ie
E
Figura 60. Modelo de Ebers-Moll.
Las siguientes relaciones se tienen entre los coeficientes, del
modelo de Ebers-Moll:
I EB 0
I SE (1
R
F
)
I CB 0
I SC (1
R
F
)
I
I
F EB 0
h fe
R CB 0
F
1
F
Spice emplea el modelo de Gummel-Poon que considera
parámetros adicionales que permiten ajustar el modelo a
cualquier transistor.
5.12. Parámetros del transistor.
Se planteará el modelo de Eber-Moll, empleando Maple, y se
ajustarán los parámetros para tener igual modelo en SPICE.
Planteando las ecuaciones de Ebers-Moll:
> restart;with(plots):
> ecs:={-ib-ic=-Iebo*(exp((vbe)/Vt)-1)-ar*ic,
ic=-Icbo*(exp(((vbe)-vce)/Vt)-1)+af*(ib+ic)}:
> ecs1:=solve(ecs,{ib,ic}):
> datos:={Icbo=0.19733360e-15,
af=0.990099,ar=0.90,Vt=25.8e-3}:
hf:= eval(af/(1-af),datos);Iebo:=eval(ar*Icbo/af,datos):
Ise:=eval(Iebo/(1-ar*af),datos):Isc:=eval(Icbo/(1ar*af),datos);
Profesor Leopoldo Silva Bijit
30/12/2009
Teoría de Redes Eléctricas.
75
hf := 99.99989900
Isc := .1811881088 10 -14
El modelo SPICE tiene los parámetros Is y BF, para describir
Isc y hfe.
Las curvas características del transistor se obtienen con:
> sol:=eval(ecs1,datos):assign(sol):
> plot({eval(ic,vbe=0.65),eval(ic,vbe=0.75)},vce=0.0..1,
color=[red,blue]);
> plot({eval(ib*1e6,vce=.1),eval(ib*1e6,vce=10)},
vbe=0.5..0.7,color=[red,blue]);
Vbe=0,70
Vbe=0,65
Figura 61. Características de salida.
Nótese que la unidad de la corriente de base es
Figura 62.
A, en la
Vce=0,1
Vce=10
Figura 62. Características de entrada.
Para comprobar el ajuste de los parámetros, la corriente de
base, en microamperes cuando vce=10 y vbe=0,68, resulta:
Profesor Leopoldo Silva Bijit
30/12/2009
76
Algoritmos para el análisis de redes.
> eval(ib*1e6,{vce=10,vbe=0.68});
4.559254875
Obteniendo la corriente de base y colector en el siguiente
modelo SPICE, en el cual se han ajustado los parámetros de la
corriente inversa de saturación y la ganancia del transistor BF,
que equivale a hfe. Se obtiene la gráfica que se ilustra en la
Figura 63.
Características Ib(Vbe) en BJT
Vce 1 0 DC 10V
Vbe 2 0 DC 0;
* CBE
Q1 1 2 0 transistor
.model transistor NPN (Is=.18111881088e-14A BF=100)
* Análisis DC Vbe varía desde 1 a 10 V en incrementos de 100mV
.DC Vbe 500mV 700mV 10mV
.probe
.end
ib=4,7 A
Figura 63. Corrientes en SPICE.
Nótese que ajustando sólo los valores de Is y BF, las
corrientes de colector y base tienen la misma forma. Mostrando
una ganancia constante de 100; esto observando las diferentes
escalas para las corrientes, en la Figura 63.
Profesor Leopoldo Silva Bijit
30/12/2009
Teoría de Redes Eléctricas.
77
Los valores de los parámetros son de fundamental
importancia en el ajuste del modelo. Pequeñas variaciones de
éstos mostrarán diferencias en las soluciones que se obtengan.
En el caso que se estudia, si los parámetros SPICE y Maple
difieren, las soluciones no serán comparables.
5.13. Punto de operación.
Agregando redes de polarización se deja al transistor
trabajando en un punto (ib, vbe) de la característica de entrada,
y en un punto (ic, vce) de la característica de salida. Los valores
pueden obtenerse aplicando método nodal, a la red de la Figura
64, calculando los voltajes vbe, vce. Mediante éstos pueden
calcularse ib e ic.
Resolveremos el problema no lineal, empleando SPICE, que
entrega los resultados; y empleando Maple para resolver las
ecuaciones no lineales. Mediante este proceder intentamos
ilustrar la forma de cálculos que están incorporados en SPICE.
Para poder comparar los resultados los parámetros del
transistor Maple y SPICE deben modelar la misma componente.
Esto se explicó en el punto anterior.
4
+Vcc
Rc
1
3
Rb
Vin
NPN
Vc
2
0
Figura 64. Redes de polarización.
Emplearemos los siguientes valores para las mallas de
polarización: Rb=10K, Rc=2K, Vcc=5, Vin=0,8.
El siguiente netlist representa la red de la Figura 64.
Profesor Leopoldo Silva Bijit
30/12/2009
78
Algoritmos para el análisis de redes.
Punto de Operación de transistor
*
Rb 1 2 10k
Rc 4 3 2k
* CBE
Q1 3 2 0 transistor
Vcc 4 0 5V
Vin 1 0 0.8
.model transistor NPN (Is=.1811881088e-14A BF=100 )
.op
.probe
.end
Los resultados quedan en un archivo con extensión .out,
resultan:
SMALL SIGNAL BIAS SOLUTION
TEMPERATURE = 27.000 DEG C
****************************************************************
NODE VOLTAGE NODE VOLTAGE NODE VOLTAGE NODE VOLTAGE
( 1)
.8000
(2)
.6994
(3) 2.9886
(4)
5.0000
Donde V(2) es el voltaje base-emisor, y V(3) es el voltaje
collector-emisor.
Las siguientes líneas, describen en Maple, las funciones no
lineales de las redes de polarización. El comando fsolve,
encuentra, empleando el método de Newton-Raphson, la
solución del sistema no lineal simultáneo de ecuaciones.
> F1:=vce+Rc*ic-Vcc:F2:=vbe+Rb*ib-Vin:
> datospol:={Vcc=5,Rb=10e3,Rc=2e3,Vin=.8}:
> fsolve({eval(F1,datospol),eval(F2,datospol)},{vbe,vce});
{ vce
3.004198067 , vbe
.7002098022 }
Los cuales son comparables a la solución obtenida por
SPICE.
vce
2.9886, vbe
0.6994
Empleando Maple, pueden graficarse las características no
lineales de las mallas de polarización:
> rangos:= vbe=0..0.8,vce=0..5:
p1:=implicitplot(eval(F1,datospol),rangos,
numpoints=10000,color=red):
Profesor Leopoldo Silva Bijit
30/12/2009
Teoría de Redes Eléctricas.
79
p2:=implicitplot(eval(F2,datospol),rangos,
numpoints=1000,color=blue):
display(p1,p2);
Se obtiene la gráfica de la Figura 65.
F2(vbe, vce)
F1(vbe, vce)
Figura 65. Redes de polarización.
5.14. Característica de transferencia.
En el programa SPICE, basta agregar el comando para
efectuar un barrido DC, variando el voltaje de entrada y
obteniendo el voltaje de salida.
Variaremos desde 0,4 hasta 1,4 el voltaje de entrada, en
intervalos de 10 mV:
.dc Vin 0.4 1.4 0.010
Se obtiene la gráfica de la Figura 66.
Profesor Leopoldo Silva Bijit
30/12/2009
80
Algoritmos para el análisis de redes.
Figura 66. Vout/Vin mediante SPICE.
En Maple es preciso repetir el cálculo anterior, para el punto
de operación, variando el voltaje de entrada y almacenando los
valores del punto de operación correspondiente en el arreglo
Cp[n].
> Vin[0]:=0.4:DeltaV:=0.05:nmax:=1/DeltaV:
datosDC:={Vcc=5,Rb=10e3,Rc=2e3,Vin=Vin[n]}:
> for n from 0 to nmax do
Cp[n]:=fsolve({eval(F1,datosDC),eval(F2,datosDC)},
{vbe,vce});
if lhs(Cp[n][1])=vbe
then Vbe[n]:=rhs(Cp[n][1])
else Vce[n]:=rhs(Cp[n][1])
fi;
if lhs(Cp[n][2])=vce
then Vce[n]:=rhs(Cp[n][2])
else Vbe[n]:=rhs(Cp[n][2])
fi;
Vin[n+1]:=Vin[n]+DeltaV;
#printf(" %f %f %f \n",Vin[n] ,Vbe[n],Vce[n]);
od:
Mediante los puntos generados, se generan gráficos, y se
obtiene la Figura 67.
> S1:=[seq([Vin[k],Vbe[k]],k=0..nmax)]:
S2:=[seq([Vin[k],Vce[k]],k=0..nmax)]:
> p1:=pointplot(S1,symbol=diamond,color=red):
p2:=pointplot(S2,symbol=circle,color=blue):
display(p1,p2);
Profesor Leopoldo Silva Bijit
30/12/2009
Teoría de Redes Eléctricas.
81
Figura 67. Transferencia Vout/Vin mediante Maple.
La cual puede compararse con la Figura 66.
6. Análisis de pequeña señal.
Se desea encontrar modelos equivalentes, para pequeñas
variaciones de las señales relativas a su punto de operación, en
redes no lineales.
Consideremos la red no lineal RNL conectada a la red R, y tal
que no existen dependencias entre las variables internas de
ambas redes, excepto la que se muestra entre los terminales de
ellas.
iin
va
+
i
R
RNL
v
Figura 68. Conexiones de RNL.
No pueden presentarse fuentes controladas en una red, que
tengan su elemento de control en la otra; tampoco inductores
acoplados, que tengan una inductancia en una red y su par
acoplado en la otra.
La fuente externa va, es un generador arbitrario, cuyas
componentes variables en el tiempo deben tener amplitudes
mucho menores que su componente continua.
Profesor Leopoldo Silva Bijit
30/12/2009
82
Algoritmos para el análisis de redes.
En la red no lineal pueden estar presentes generadores
continuos cuyo fin es polarizar o dar un punto de operación a
las componentes no lineales.
6.1. Modelo de pequeña señal.
Puede reemplazarse la red R por una fuente de corriente
para efectuar cálculos en la red no lineal, como se muestra en
la Figura 69.
iin
va
RNL
+
v
i
Figura 69. Substitución por fuente de corriente.
La solución de la RNL es la misma si tiene conectada la red R
o la fuente de corriente. La fuente i representa la corriente que
circularía hacia la red R, cuando a ésta se le aplique la tensión
v.
Si en la red de la Figura 69, se plantean las ecuaciones de la
red, y se eliminan las variables internas, se obtienen dos
relaciones no lineales, que dependerán de las fuentes o causas:
v
F1 (va , i, r )
iin
F2 (va , i, r )
Donde r representa a los generadores continuos dentro de la
red no lineal.
Para un sistema de ecuaciones no lineales, se emplea la
expansión de Taylor para varias variables. La expansión es una
linealización en torno a la solución:
F ( x)
F ( xs ) J ( xs )( x xs )
Profesor Leopoldo Silva Bijit
30/12/2009
Teoría de Redes Eléctricas.
83
Las cantidades F ( x ) y ( x
xs ) se expresan como vectores, y
J ( xs ) como una matriz, denominada Jacobiano.
Para una variación, respecto de un punto cualquiera, con
aproximación de primer orden, se tiene:
F ( xk 1 )
F ( xk ) J ( xk )( xk
1
xk )
Para entender la relación anterior, se ilustra la forma que
ella toma para dos funciones de dos variables x1 y x2, se
obtiene:
F1 ( x1k , x 2 k )
F1 ( x1k , x 2 k )
F1 ( x1k 1 , x 2 k 1 )
F1 ( x1k , x 2 k )
x1
x2
x1k 1 x1k
F2 ( x1k 1 , x 2 k 1 )
F2 ( x1k , x 2 k )
F2 ( x1k , x 2 k )
F2 ( x1k , x 2 k )
x2k 1 x2k
x1
x2
Para el caso que se estudia, se tienen las aproximaciones:
v(va , i ) v(vas , is )
iin (va , i ) iin (vas , is )
v(vas , is )
(va vas )
va
iin (vas , is )
(va vas )
va
v(vas , is )
(i is )
i
iin (vas , is )
(i is )
i
En las relaciones anteriores no se producen aportes de los
generadores continuos en el lado derecho de las ecuaciones.
6.2. Variables de pequeña señal.
Si definimos las variables de pequeña señal como las
variaciones respecto del punto de operación, tendremos:
v ps
v(va , i ) v(vas , is )
vaps
(va vas )
i ps
iinps
(i is )
iin (va , i ) iin (vas , is )
Profesor Leopoldo Silva Bijit
30/12/2009
84
Algoritmos para el análisis de redes.
Las que reemplazadas en las relaciones anteriores generan el
modelo para pequeñas señales:
v ps
v(vas , is )
vaps
va
v(vas , is )
i ps
i
iinps
iin (vas , is )
vaps
va
iin (vas , is )
i ps
i
6.3. Red equivalente en pequeña señal.
Consideremos ahora la siguiente red:
iinps
vaps
+
ips
Rin
+
gips
+
Rout
kvaps
vps
Figura 70. Red para pequeñas señales.
Para la Figura 70, se tienen:
v ps
kvaps
Rout i ps
vaps
Riniinps
gi ps
Comparando con las ecuaciones anteriores se pueden
definir:
k
Rin
v(vas , is )
va
1
iin (vas , is )
va
Rout
g
v(vas , is )
i
iin (vas , is )
i
iin (vas , is )
va
Donde k, sin unidades, es la ganancia de voltaje; g con
unidades de conductancia es la transconductancia incremental,
que refleja el efecto de corriente de salida en el circuito de
Profesor Leopoldo Silva Bijit
30/12/2009
Teoría de Redes Eléctricas.
85
entrada; Rin y Rout, con unidades de resistencia, se denominan
resistencia de entrada y salida respectivamente.
6.4. Ejemplo. Red lineal con polarización.
Sea la red lineal, que se muestra en la Figura 71. La red R,
de la Figura 68, se ha substituido por una fuente de corriente i.
Calcularemos el modelo para pequeña señal, considerando que
el punto de operación se calcula para los siguientes valores de
las fuentes:
va
1, vc
5, i
3/8
Consideramos los siguientes valores para las resistencias:
Ra
1, R c
1
Ra
5, R 1
2
iin
Rc
+
Va
3
+
Vc
i
R
v
0
Figura 71. Red lineal.
Se obtienen las siguientes ecuaciones, para el voltaje de
salida y la corriente de entrada.
v(va , i, vc )
iin (va , i, vc )
RRc va RRa Rc i RRa vc
RRa RRc Ra Rc
( R Rc )va RRci Rvc
RRa RRc Ra Rc
va i 5
3
2va i 5
3
Se obtiene el punto de operación:
v 15 / 8, iin
7 / 8, va
Profesor Leopoldo Silva Bijit
1, vc
5, i 3 / 8
30/12/2009
86
Algoritmos para el análisis de redes.
Aplicando las fórmulas de definición, los parámetros de
pequeña señal, resultan:
k
Rout
Rin
g
v(vas , is )
=
va
RRa
v(vas , is )
i
RRc
RRc Ra Rc
1/ 3
RRa Rc
RRa RRc Ra Rc
1/ 3
RR RRc Ra Rc
1
= a
= 3/2
iin (vas , is )
R Rc
va
iin (vas , is )
i
iin (vas , is )
va
RRc
R Rc
1/ 2
En la Figura 72, se muestra el plano, que representa la
función del voltaje de salida, en términos de las fuentes.
Resulta un plano, debido a que la red es lineal.
Se muestra el punto de operación (p.o.) para polarización
vc=5. Si se cambia el valor de polarización de v c a 10, el punto
de operación se desplaza a la curva superior, ahora v en el
punto de operación toma valor 3,54.
v(va,i,vc=10)
v(va,i,vc=5)
p.o
.
Figura 72. Red lineal.
Si ahora se inyecta una pequeña señal, sobre el punto de
polarización:
va 1 vaps (t ), vaps (t ) 0,3cos(t ), vc
Profesor Leopoldo Silva Bijit
5, i 3/ 8
30/12/2009
Teoría de Redes Eléctricas.
87
Se obtiene para el voltaje de salida que la señal total es:
v
15
0,1cos(t )
8
Entonces la pequeña señal del voltaje de salida es:
v ps
0,1cos(t )
Las formas de ondas se ilustran en la Figura 73, junto al
valor de polarización del voltaje de salida:
vs
15
8
vs
v(t)
vps(t)
Figura 73. Señal total y pequeña señal.
La red equivalente, con los valores de los parámetros de
pequeña señal, se muestra en la Figura 74.
iinps
vaps
+
ips
3/2
+
+
-ips/2 vaps/3
1/3
vps
Figura 74. Red equivalente para pequeñas señales.
6.4.1. Solución SPICE.
El análisis de característica de transferencia de SPICE,
permite obtener los parámetros de pequeña señal. El netlist que
describe la red de la Figura 71, se muestra a continuación, con
voltaje de salida V(2):
Profesor Leopoldo Silva Bijit
30/12/2009
88
Algoritmos para el análisis de redes.
pequeña señal
Va 1 0 1
Ra 1 2 1
Rc 2 3 1
Vc 3 0 5
R 201
I 2 0 0.375
.op
.tf V(2) Va
.end
Los resultados para el punto de operación, se encuentran en
el archivo de salida, y coinciden con los anteriores:
****SMALL SIGNAL BIAS SOLUTION TEMPERATURE =27.000 DEG C
******************************************************************************
NODE VOLTAGE
NODE VOLTAGE
NODE VOLTAGE
( 1) 1.0000
( 2) 1.8750
( 3) 5.0000
VOLTAGE SOURCE CURRENTS
NAME
CURRENT
Va
8.750E-01
Vc
-3.125E+00
TOTAL POWER DISSIPATION 1.48E+01 WATTS
Los parámetros de pequeña señal, se entregan según:
****
SMALL-SIGNAL CHARACTERISTICS
V(2)/Va = 3.333E-01
INPUT RESISTANCE AT Va = 1.500E+00
OUTPUT RESISTANCE AT V(2) = 3.333E-01
Nótese que no entrega el parámetro g, sólo los valores de k,
Rin y Rout.
Si se agrega una señal alterna, modificando el estímulo para
Va, y se realiza un análisis transitorio:
pequeña señal
Va 1 0 SIN(1V 0.3V 0.1592 0 0 90) ;pequeña señal
Ra 1 2 1
Rc 2 3 1
Profesor Leopoldo Silva Bijit
30/12/2009
Teoría de Redes Eléctricas.
89
Vc 3 0 5
R 201
I 2 0 0.375
.op
.tf V(2) Va
.tran 0.1s 15 0.01
.probe
.end
Se obtienen las formas de ondas que se muestran en la
Figura 75.
v(t
)
va(t)
iin(t)
Figura 75. Señales totales en análisis transitorio.
6.4.2. Solución Maple.
La siguiente secuencia de comandos produce las ecuaciones,
y efectúa los cálculos del punto de operación y de los
parámetros de pequeña señal.
> restart;with(plots):
> ecs:={v1=va,v2=Ra*(-iin),v3=Rc*i3,v4=vc,v5=R*i5,i6=i,
-iin+i3+i5+i6=0,v1+v2=v3+v4,v3+v4=v5,v5=v}:
datosop:={Ra=1,Rc=1,R=1,vc=5,va=1,i=3/8}:
Cálculo de ecuaciones
> solv:=eliminate(ecs,{v1,v2,v3,v4,v5,iin,i3,i4,i5,i6}):
ecv:=solve(solv[2],v);
ecv := { v
R ( vc Ra Rc i Ra Rc va )
}
Rc R Rc Ra Ra R
> soli:=eliminate(ecs,{v1,v2,v3,v4,v5,v,i3,i4,i5,i6}):
Profesor Leopoldo Silva Bijit
30/12/2009
90
Algoritmos para el análisis de redes.
eci:=solve(soli[2],iin);
eci := { iin
R va vc R Rc va Rc i R
}
Rc R Rc Ra Ra R
> assign(ecv,eci);
Cálculo punto de operación
> eval(iin,datosop);eval(v,datosop);
-7
8
15
8
Cálculo parámetros de pequeña señal:
> k:=diff(v,va);
k :=
Rc R
R Rc
Rc Ra
Ra R
> Rout:=-diff(v,i);
Rout :=
R Rc Ra
Rc R Rc Ra Ra R
> Rin:=1/diff(iin,va);
Rin :=
Rc R
Rc Ra Ra R
R Rc
> g:=-diff(iin,i)/diff(iin,va);
g :=
R Rc
R Rc
Evaluación de los parámetros de pequeña señal:
> datos:={Ra=1,Rc=1,R=1,vc=5}:
datos1:={Ra=1,Rc=1,R=1,vc=10}:
> eval(k,datos);
1
3
> eval(Rout,datos);
1
3
> eval(Rin,datos);
3
2
> eval(g,datos);
-1
2
Profesor Leopoldo Silva Bijit
30/12/2009
Teoría de Redes Eléctricas.
91
Cálculo valores punto de operación:
> eval(iin,datosop);eval(v,datosop);
-7
8
15
8
La gráfica de la Figura 72, se obtiene con:
> plot3d({eval(v,datos),eval(v,datos1)},va=0..2,i=3/8..2,
axes=boxed);
La gráfica de la Figura 73, se obtiene con:
> datosop:={Ra=1,Rc=1,R=1,vc=5,va=1+0.3*cos(t),i=3/8}:
> plot([15/8,eval(v,datosop),0.1*cos(t)],t=0..15,
y=-0.5..2.2,color=[red,blue,black]);
6.5. Ejemplo. Red no lineal basada en
transistor bipolar.
4
+Vcc
Rc
3
iin
Rb
2
1
NPN
Rbp
+
Vin
iload
6
+
Vb
0
Figura 76. Análisis de pequeña señal en red con transistor.
6.5.1. Modelo del transistor.
Se definen las ecuaciones de Ebers-Moll para el transistor.
> restart;with(plots):
> ecs:={-ib-ic=-Iebo*(exp((vbe)/Vt)-1)-ar*ic,
ic=-Icbo*(exp(((vbe)-vce)/Vt)-1)+af*(ib+ic)}:
> ecs1:=solve(ecs,{ib,ic}):
> datos:={Icbo=0.19733360e-15,af=0.990099,ar=0.90,
Vt=25.8e-3}:
hf:= eval(af/(1-af),datos);
Iebo:=eval(ar*Icbo/af,datos):
Ise:=eval(Iebo/(1-ar*af),datos):
Isc:=eval(Icbo/(1-ar*af),datos);
Isc := .1811881088 10 -14
> sol:=eval(ecs1,datos):assign(sol):
Profesor Leopoldo Silva Bijit
30/12/2009
92
Algoritmos para el análisis de redes.
Luego del assign(sol), quedan definidas expresiones para las
corrientes en el transistor: ib(vbe, vce) e ic(vbe, vce)
6.5.2. Punto de operación.
Para el cálculo del punto de operación se definen las
ecuaciones F1=0, F2=0 y F3=0. Las que se obtienen a partir del
circuito de la Figura 76.
> F1:=vce+Rc*(ic+iload)-Vcc:
F2:=vbe+Rb*iin-Vin:
F3:=vbe-(iin-ib)*Rbp-Vb:
Se definen datos para las mallas de polarización:
> datospol:={Vcc=10,Vb=10,Rb=2e3,Rc=1e3,Rbp=22.4e3,
iload=0.5e-3,Vin=0}:
Se resuelve el sistema de ecuaciones no lineales:
> fsolve({eval(F1,datospol),eval(F2,datospol),
eval(F3,datospol)},{vbe,vce,iin});
{ vce
5.083655665 , vbe
.7385850710 , iin
-.0003692925355 }
La solución SPICE para el punto de operación, entrega:
NODE VOLTAGE
( 1) 0.0000
( 4) 10.0000
NODE VOLTAGE
( 2) .7379
( 6) 10.0000
NODE VOLTAGE
( 3) 5.0470
VOLTAGE SOURCE CURRENTS
NAME
CURRENT
Vcc
-4.953E-03
Vbp
-4.135E-04
Vin
3.690E-04
La corriente iin, que circula del punto 1 al 2, es el valor
negativo de la corriente en la fuente Vin, ya que en ésta circula
de 1 a 0.
V(2) es el voltaje base emisor, vbe.
V(3) es el voltaje colector emisor, vce.
Profesor Leopoldo Silva Bijit
30/12/2009
Teoría de Redes Eléctricas.
93
6.5.3. Análisis de pequeña señal. Cálculo de
parámetros.
Las ecuaciones de la red, se evalúan de tal modo que las
variables queden en términos de la corriente en la carga iload,
y el voltaje Vin.
> ecs2:={vce+Rc*(ic+iload)-Vcc=0,
vbe+Rb*iin-Vin=0,
vbe-(iin-ib)*Rbp-Vb=0}:
datospeq:={Vcc=10,Vb=10,Rb=2e3,Rc=1e3,Rbp=22.4e3}:
> sol2:=solve(eval(ecs2,datospeq),{vbe,vce,iin}):
> assign(sol2):
Quedan asignadas las expresiones para vbe(Vin, iload),
vce(Vin, iload), iin(Vin, iload).
Los parámetros de pequeña señal se calculan evaluando las
derivadas parciales, y luego tomando su valor en el punto de
operación:
> k:=diff(vce,Vin):
k:=evalf(eval(k,{Vin=0,iload=0.5e-3}));
k := -37.93115109
> Rout:=-diff(vce,iload):
Rout:=evalf(eval(Rout,{Vin=0,iload=0.5e-3}));
Rout := 1000.
> Rin:=1/diff(iin,Vin):
Rin:=evalf(eval(Rin,{Vin=0,iload=0.5e-3}));
Rin := 2569.344490
> g:=-diff(iin,iload)/diff(iin,Vin):
g:=evalf(eval(g,{Vin=0,iload=0.5e-3}));
g := .3452697001 10 -6
Los cuales coinciden, dentro de la tolerancia de cálculo con
números reales con que se definen los parámetros del
transistor, con los obtenidos por SPICE, mediante el comando
.tf V(3) Vin.
Profesor Leopoldo Silva Bijit
30/12/2009
94
Algoritmos para el análisis de redes.
****
SMALL-SIGNAL CHARACTERISTICS
V(3)/Vin = -3.798E+01
INPUT RESISTANCE AT Vin = 2.566E+03
OUTPUT RESISTANCE AT V(3) = 1.000E+03
La forma de onda del voltaje de salida para una excitación
sinusoidal de 1KHz y amplitud 10mV, puede obtenerse con:
> plot(eval(vce,{iload=0.5e-3,
Vin=(10e-3)*sin(2*Pi*1e3*t)}),
t=0..1.4e-3);
Figura 77. Voltaje de salida. Maple.
La función no lineal vce, puede visualizarse en una gráfica
tridimensional, que se obtiene con:
Profesor Leopoldo Silva Bijit
30/12/2009
Teoría de Redes Eléctricas.
95
> plot3d(vce,iload=0.4e-3..0.6e-3,Vin=-0.2..0.2,
axes=boxed);
p.o
.
Figura 78. Característica no lineal de salida.
En la Figura 78, se ha marcado el punto de operación.
Una gráfica tridimensional de la función no lineal que
describe la corriente de entrada en términos de Vin y la
corriente en la carga, se obtiene con:
> plot3d(iin,iload=0.4e-3..0.6e-3, Vin=-0.2..0.2,
axes=boxed);
Figura 79. Característica no lineal de entrada.
Profesor Leopoldo Silva Bijit
30/12/2009
96
Algoritmos para el análisis de redes.
6.5.4. Netlist para
obtenidos con Maple.
comparar
resultados
Pequeña señal alterna en la entrada.
Vcc 4 0 10
Vbp 6 0 10
Rc 4 3 1k
Rbp 6 2 22.4k ;
Rb 1 2 2k
*Rload 3 0 10k
Iload 3 0 0.5mA
Q1 3 2 0 npn-trans
Vin 1 0 SIN(0, 10mV, 1k, 0, 0, 0)
.DC Vin -.5 +.5V 10mV ; calcula transferencia con barrido DC
.tran 0 2.0m 0.1u
.tf V(3) Vin
.model npn-trans npn (is=.1811881088e-14 bf=100 vaf=000)
.op ;calcula punto operación
.probe
.end
La fuente de corriente en la carga de 0,5mA simula una
resistencia de carga de 10K con vce=5 en el punto de operación.
Las formas de ondas del voltaje de salida y el de entrada,
obtenidas mediante el comando .tran de SPICE, se muestran en
la Figura 80.
Figura 80. Formas de ondas SPICE.
Profesor Leopoldo Silva Bijit
30/12/2009
Teoría de Redes Eléctricas.
97
7. Resumen.
Mediante Maple se muestra cómo se efectúan cálculos en
redes no lineales y dinámicas. Estos algoritmos, pero más
avanzados, se encuentran incorporados internamente en la
aplicación SPICE.
Debe considerarse a SPICE como un analizador de redes no
lineales dinámicas.
En un ambiente de diseño electrónico interesa cambiar el
valor de alguna componente o estudiar el efecto de agregar o
quitar una componente, con miras a posteriormente armar el
sistema para pruebas de laboratorio. Dependiendo de la
habilidad y experiencia del diseñador, pueden someterse a
análisis determinadas interconexiones de componentes,
considerando precisas definiciones de los modelos de cada una
(modelado). A este proceso suele denominarse simulación.
Mientras mayor sea la experiencia del diseñador, más
cercanos serán los resultados obtenidos por simulación a los
medidos experimentalmente en el laboratorio. Las diferencias
en los resultados se deben a modelos incompletos.
Referencia.
Leopoldo Silva Bijit, Redes Eléctricas, Pearson Prentice Hall,
2006. Apéndices 1 y 2.
Profesor Leopoldo Silva Bijit
30/12/2009
98
Algoritmos para el análisis de redes.
Índice general.
ALGORITMOS PARA EL ANÁLISIS DE REDES. ....................................... 1
1. MÉTODOS DE ANÁLISIS PARA REDES ESTÁTICAS. ........................................... 2
1.1. Formulación de ecuaciones. ................................................................. 2
1.2. Modelo matemático. ............................................................................. 3
1.3. Descomposición LU. ............................................................................ 4
1.4. Implementación en Maple. ................................................................... 9
1.5. Comandos Maple de álgebra lineal. ................................................... 11
1.6. Solución usando ecuaciones de la red y solve de Maple. ..................... 12
1.7. Solución SPICE. ................................................................................ 12
1.8 Métodos iterativos............................................................................... 13
2. MÉTODOS DE ANÁLISIS PARA REDES DINÁMICAS. ........................................ 16
2.1. Método de mallas. .............................................................................. 16
2.2. Método mixto. .................................................................................... 18
2.3. Solución Maple, para obtener las ecuaciones de estado, y resolver las
ecuaciones diferenciales................................................................................. 20
2.4. Solución de las ecuaciones diferenciales usando SPICE. .................... 23
3. SOLUCIÓN NUMÉRICA DE SISTEMAS DE ECUACIONES DIFERENCIALES. .......... 25
3.1. Formulación de ecuaciones de estado................................................. 26
3.2. Método de Euler................................................................................. 28
3.3. Solución analítica. ............................................................................. 29
3.4. Solución numérica. ............................................................................ 30
4. REDES NO LINEALES. ................................................................................. 32
4.1. Redes con diodos. .............................................................................. 33
4.2. Redes con transistores........................................................................ 41
4.3. Ejercicios propuestos. ........................................................................ 55
5. ALGORITMOS PARA ANÁLISIS DE REDES NO LINEALES. ................................. 57
5.1. Formulación de ecuaciones no lineales. ............................................. 58
5.2. Método de Newton-Raphson. .............................................................. 59
5.4. Implementación Maple de Newton-Raphson. ...................................... 61
5.5. Punto de operación. ........................................................................... 63
5.6. Análisis DC........................................................................................ 64
5.7. Generalización para sistemas de ecuaciones no lineales. .................... 65
5.8. Sistema no lineal de dos ecuaciones. .................................................. 69
5.9. Punto de operación. ........................................................................... 71
5.10. Barrido DC. ..................................................................................... 72
5.11. Transistor. ....................................................................................... 73
5.12. Parámetros del transistor. ................................................................ 74
5.13. Punto de operación. ......................................................................... 77
5.14. Característica de transferencia......................................................... 79
6. ANÁLISIS DE PEQUEÑA SEÑAL. .................................................................... 81
6.1. Modelo de pequeña señal. .................................................................. 82
Profesor Leopoldo Silva Bijit
30/12/2009
Teoría de Redes Eléctricas.
99
6.2. Variables de pequeña señal................................................................ 83
6.3. Red equivalente en pequeña señal. ..................................................... 84
6.4. Ejemplo. Red lineal con polarización. ................................................ 85
6.5. Ejemplo. Red no lineal basada en transistor bipolar. .......................... 91
7. RESUMEN. ................................................................................................. 97
REFERENCIA. ................................................................................................ 97
ÍNDICE GENERAL. .......................................................................................... 98
ÍNDICE DE FIGURAS. ...................................................................................... 99
Índice de Figuras.
Figura
Figura
Figura
Figura
Figura
Figura
Figura
Figura
Figura
Figura
Figura
Figura
Figura
Figura
Figura
Figura
Figura
Figura
Figura
Figura
Figura
Figura
Figura
Figura
Figura
Figura
Figura
Figura
Figura
Figura
1. Red resistiva........................................................... 2
2. Diagrama de la red. .............................................. 16
3. Mallas. ................................................................. 17
4. Diagrama de la red. .............................................. 18
5. Árbol y variables. .................................................. 19
6. Formas de ondas. ................................................. 23
7. Diagrama de la red. .............................................. 23
8. Variables de estado, en el tiempo. ......................... 25
9. Red RLC. .............................................................. 26
10. Solución transitoria analítica. ............................. 30
11. Solución transitoria numérica. ............................ 31
12. Espacio de estado. .............................................. 32
13. Característica exponencial de diodo. ..................... 33
14. Análisis DC. ........................................................ 34
15. Efecto de la resistencia interna del diodo. ............. 35
16. Resistencia para limitar la corriente en el diodo. ... 35
17. Corriente y Voltaje en el diodo. ............................. 36
18. Simulación paramétrica. ...................................... 37
19. Simulación transitoria. ........................................ 37
20. Respuesta transitoria. .......................................... 38
21. Simulación transitoria con condensador. .............. 39
22. Efecto del condensador. ....................................... 39
23. Limitador en base a diodos................................... 40
24. Transferencia V(2)/V(1). ....................................... 40
25. Medición Ib(Vbe) con Vce constante. ..................... 41
26. Característica Ib(Vbe) con Vce constante. ............. 42
27. Medición Ic(Vce) con Ib constante. ........................ 42
28. Característica de salida Ic(Vce) con Ib constante. .. 43
29. Influencia de la corriente de base. ........................ 44
30. Punto de operación. ............................................. 45
Profesor Leopoldo Silva Bijit
30/12/2009
100
Figura
Figura
Figura
Figura
Figura
Figura
Figura
Figura
Figura
Figura
Figura
Figura
Figura
Figura
Figura
Figura
Figura
Figura
Figura
Figura
Figura
Figura
Figura
Figura
Figura
Figura
Figura
Figura
Figura
Figura
Figura
Figura
Figura
Figura
Figura
Figura
Figura
Figura
Figura
Figura
Figura
Figura
Algoritmos para el análisis de redes.
31.
32.
33.
34.
35.
36.
37.
38.
39.
40.
41.
42.
43.
44.
45.
46.
47.
48.
49.
50.
51.
52.
53.
54.
55.
56.
57.
58.
59.
60.
61.
62.
63.
64.
65.
66.
67.
68.
69.
70.
71.
72.
Variación del punto de operación. ........................ 46
Corrientes en las zonas........................................ 46
Característica de transferencia............................. 47
Característica Vce versus Vin............................... 48
Amplificación. ..................................................... 49
Distorsión de segunda armónica. ......................... 49
Distorsión por no linealidad. ................................ 50
Distorsión de tercera armónica. ........................... 50
Amplificador en base a transistor bipolar. ........... 51
Entrada y salida sinusoidal. ................................ 52
Inversor simple. .................................................. 52
Conmutación. ..................................................... 53
Inversor TTL. ....................................................... 54
Conmutación inversor TTL. .................................. 55
Ejercicio 1. .......................................................... 56
Diodo no lineal con resistencia serie. .................... 58
Iteración Newton-Raphson. .................................. 60
Característica diodo no lineal. .............................. 61
Punto de operación.............................................. 62
Convergencia hacia la solución. ........................... 63
Corriente en el diodo en [mA] versus Vin. ............. 64
Voltaje en el diodo versus Vin. ............................. 65
Interpretación del Jacobiano de dos variables. ...... 66
Variación total de función de dos variables. .......... 68
Red no lineal con dos diodos. ............................... 69
Vin>10. D1 conduce, D2 no conduce. ................... 70
Vin<10. D1 no conduce, D2 conduce. ................... 70
Solución SPICE. Barrido DC 0<Vin<15. ................ 72
Solución Maple. Barrido DC 0<Vin<15. ................ 73
Modelo de Ebers-Moll. ......................................... 74
Características de salida. ..................................... 75
Características de entrada. .................................. 75
Corrientes en SPICE. ........................................... 76
Redes de polarización. ......................................... 77
Redes de polarización. ......................................... 79
Vout/Vin mediante SPICE. .................................. 80
Transferencia Vout/Vin mediante Maple. ............. 81
Conexiones de RNL.............................................. 81
Substitución por fuente de corriente. ................... 82
Red para pequeñas señales. ................................. 84
Red lineal. ........................................................... 85
Red lineal. ........................................................... 86
Profesor Leopoldo Silva Bijit
30/12/2009
Teoría de Redes Eléctricas.
Figura
Figura
Figura
Figura
Figura
Figura
Figura
Figura
73.
74.
75.
76.
77.
78.
79.
80.
101
Señal total y pequeña señal. ................................. 87
Red equivalente para pequeñas señales. ............... 87
Señales totales en análisis transitorio. .................. 89
Análisis de pequeña señal en red con transistor. ... 91
Voltaje de salida. Maple. ...................................... 94
Característica no lineal de salida. ......................... 95
Característica no lineal de entrada. ...................... 95
Formas de ondas SPICE. ...................................... 96
Profesor Leopoldo Silva Bijit
30/12/2009