+ = + 1 2 d d r r
Anuncio

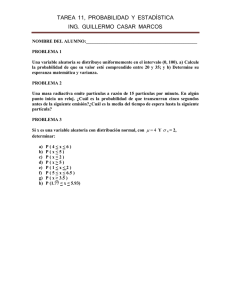
DINÁMICA DE CHOQUES 1. Probabilidad de reacción depende de: A. Violencia de choque B. Proximidad - diferencia entre colisión frontal vs roce C. Orientación relativa D. Rotación y Vibración E. Propiedades físicas: conductividad termal, viscosidad, difusión, etc. 2. Modelo de esferas rígidas: A. B. La velocidad con que se mueven la partícula es inversamente proporcional a la masa de la partícula. C. Se define σ (sigma) como la distancia entre los centros de las esferas de acuerdo a la ecuación 1 2 d A d B rA rB para un sistema de dos esferas rígidas A y B. Esta relación se representa por la figura siguiente. D. Sección transversal de colisión es el área que incluye los centros de las partículas y se define por la expresión: A = πσ2 = π(rA +rB)2 (área de un círculo) © 1997 - 2001 I. Nieves Martínez Página - 23 - DINÁMICA DE CHOQUES E. El desplazamiento de estas partículas en un tiempo dado se puede definir por la ecuación de velocidad: v desplazamiento d unidad de tiempo dt d v dt F. Asumiendo que una de las partículas se mueve (la más liviana = A) y que la otra se mantiene estática (la más pesada = B) con una velocidad promedio <v> en un área equivalente a la sección transversal A, podemos representar esta situación con el diagrama a continuación: Las partículas sombreadas tienen la capacidad de chocar efectivamente ya que el centro deben estar dentro del cilindro formado por le movimiento para que choquen. El desplazamiento de las partículas dentro del cilindro con la velocidad promedio <v> se representa por la expresión: Volumen del cilindro A x d 2 x v dt rA rB v dt 2 G. El número de choques de las partículas livianas, A, con las partículas pesadas, B, dependerá de la cantidad de partículas pesadas que haya dentro del cilindro o de su densidad (número de partículas pesadas NB por unidad de volumen, V). Si definimos el número de choques de partícula liviana por unidad de tiempo (dt = 1) como zAB entonces, z AB H. NB 2 rA rB v V Cuando ambas partículas se mueven se considera el movimiento relativo y la velocidad relativa se representa: 1 v AB v 2A v B2 2v A v B cos 2 vA vB © 1997 - 2001 I. Nieves Martínez Página - 24 - DINÁMICA DE CHOQUES Si se asumen los siguientes ángulos entre los vectores de velocidad tenemos las situaciones a continuación: Se asume que el ángulo más probable es 90E, entonces el cos 90E = 0. 1. Cuando A = B la expresión para la velocidad relativa es: 1 2 2 v AA 2v A 2v A cos 2 v 2A 21 cos 1 2 v 21 cos 1 2 Para θ = 90E: v AA v AA 2 2. Cuando A … B y θ = 90E la velocidad relativa es: v AB v 2 A vB 2 1 2 8 RT 8 RT M A MB 1 2 Se sustituyó la definición de velocidad promedio que predice la Teoría Cinético Molecular de los gases ideales: 8 RT M A vA I. El número de colisiones cuando ambas partículas se mueven entonces es: z AA 2 vA d 2 z AB rA rB J. 2 NA V para A = B y 8 RT 1 1 M A MB 1 2 NB V La rapidez de colisión total por unidad de volumen se representa por ZAB o ZAA y se expresa: 1 Z AB N 1 2 8 RT 1 A z AB rA rB M M V A B Z AA 8 RT N 1 1 1 N 2 v A d A2 A z AA A d A2 V 2 2 V M A 2 2 © 1997 - 2001 I. Nieves Martínez 2 N A NB V V 1 2 PA N 0 RT 2 Página - 25 -