Estabilidad de discretizaciones espaciales de la
Anuncio

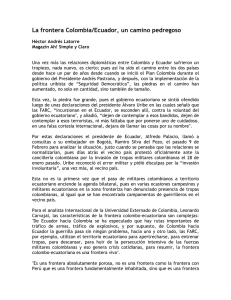
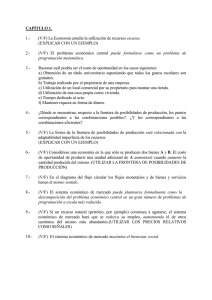
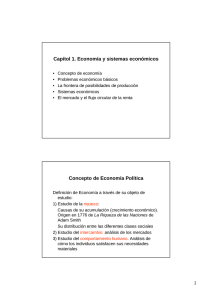
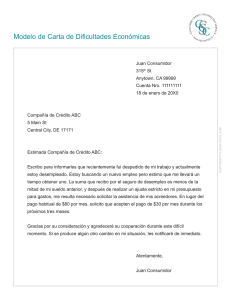
Estabilidad de discretizaciones espaciales de la ecuación de ondas con condiciones de frontera absorbentes Isaı́as Alonso Mallo, Dpto. de Matemática Aplicada, Universidad de Valladolid [email protected] Ana M. Portillo Dpto. de Matemática Aplicada, Universidad de Valladolid [email protected] Resumen El problema puro de valor inicial en dominios no acotados para la ecuación de ondas ocurre con frecuencia en muchos campos de la Matemática Aplicada. Para obtener una aproximación numérica, se tiene que realizar la computación en un dominio acotado e imponer condiciones de contorno artificiales. Una idea es usar condiciones de frontera transparentes que están diseñadas para evitar cualquier reflejo hacia el interior del dominio computacional. Con mucha frecuencia, estas condiciones de frontera transparentes no son locales y su implementación puede ser difı́cil y costosa. Las condiciones de frontera absorbentes pueden ser consideradas como una alternativa. La idea es permitir pequeños reflejos, pero con una condición de frontera que ahora es local. Consideramos condiciones de frontera absorbentes para la ecuación de ondas unidimensional introducidas en [4]. Mostramos que las ecuaciones diferenciales ordinarias que se obtienen están únicamente débilmente bien puestas si se considea la norma euclı́dea discreta. Para ello probamos condiciones necesarias con la única restricción de que los sistemas de ecuaciones diferenciales ordinarias al imponer las condiciones de frontera absorbentes sean de segundo orden en tiempo. Obtenemos también una descripción completa del error de de la discretización completa, probando que el término debido a la discretización temporal puede crecer. Sin embargo, la posible inestabilidad es tan débil que puede ser compensada usando un integrador temporal adecuado. Todos los resultados están confirmados por experimentos numéricos. Sección en el CEDYA 2011: AN 1. Notación y preliminares Consideramos la ecuación de ondas unidimensional utt = uxx , x ∈ R, t ≥ 0. (1) Nuestro primer paso para obtener una aproximación adecuada de (1) es la dicretización espacial. Sea h > 0 un tamaño de paso en espacio y consideramos los nodos xj = jh para j ∈ Z. Tomamos d2 U j Uj+1 − 2Uj + Uj−1 = , dt2 h2 j ∈ Z, t ≥ 0. (2) donde Uj (t) ≈ u(xj , t). Elegimos un intervalo finito y añadimos las condiciones de frontera absorbentes obtenidas en [4] mediante la aproximación para frecuencias bajas de las condiciones de frontera transparentes usando para ello desarrollos de Padé de grados (p, q), en cuyo caso usaremos la notación ABC(p, q). Si consideramos los casos (p, q) = (1, 0), (2, 0), (1, 2), (2, 2), cubrimos todos los casos que originan sistemas de ecuaciones diferenciales ordinarias de segundo orden en tiempo d2 uh (i) (i) duh = Ah uh + Bh , dt2 dt (i) (3) (i) donde Ah y Bh , 1 ≤ i ≤ 4 son matrices de gran dimensión que dependen de h (1 ≤ i ≤ 4 denota las diversas condiciones de frontera absorbentes). 2. Carácter de bien puesto en norma euclı́dea Consideramos la norma euclı́dea discreta para estudiar si (3) está bien puesto. Empezamos usando la cota kuh k2 ≤ kuh k2 + kduh /dtk2 , (4) donde uh (t) es la solución de (3). Entonces podemos reescribir (3) como el sistema diferencial de primer orden · ¸ · ¸ · ¸· ¸ 0 I d uh uh (i) uh = Ah = ,1≤i≤4 (5) (i) (i) vh vh dt vh Ah Bh donde vh = duh /dt, y estudiar entonces si (5) está bien puesto. Notemos en primer lugar que la matriz de coeficientes no es normal y, por tanto, no es posible usar técnicas clásicas para el estudio. Sin embargo, podemos probar una condición necesaria. Supongamos que (i) (i) (i) (i) Ah = Ph Dh (Ph )−1 , (i) 1 ≤ i ≤ 4, (6) (i) donde Dh es la matriz diagonal de autovalores. Sea βh = {máx <(µ) : µ ∈ (i) (i) (i) (i) (i) σ(Ah )} la abscisa espectral de Ah y sea κh = kPh kk(Ph )−1 k el número de (i) condición de Ph . (i) Teorema 1. Para cada 1 ≤ i ≤ 4, sea Ah la matriz de coeficientes de (5). (i) Entonces, <(µ) ≤ 0 para todo µ ∈ σ(Ah ). (i) Deducimos de este teorema que βh ≤ 0 y por tanto k[uTh (t), duTh (t) T ] k ≤ dt ≤ (i) (i) κh exp(tβh )k[uTh (0), (i) κh k[uTh (0), duTh (0) T ] k dt duTh (0) T ] k. dt (i) Es decir, el problema está bien puesto con la salvedad de que el valor κh puede crecer cuando la discretización espacial es refinada. La figura siguiente muestra (i) el comportamiento de κh para todos los casos estudiados. 9 10 8 Condition number of a matrix of eigenvectors 10 ABC(1,0) ABC(2,0) ABC(1,2) ABC(2,2) 7 10 6 10 5 10 4 10 3 10 2 10 1 10 0 10 0 10 1 2 10 10 3 10 N 3. Discretización completa y estabilidad temporal Finalmente, realizamos la discretización temporal. Consideramos el uso de un método Runge-Kutta A-estable. Sea ∆t > 0 un tamaño de paso en tiempo y denotamos tn = n∆t para n ∈ N. Si la función de estabilidad del método Runge-Kutta es r(z), obtenemos una aproximación de (5) dada por · ¸ · ¸ uh,n+1 uh,n (i) = r(∆tAh ) (7) vh,n+1 vh,n El error global completamente discreto en t = tn está dado por eh,n = Ph Qh u(tn ) − uh,n (8) donde Ph es la restricción al intervalo computacional y Qh es la proyección sobre la red espacial. Nuestro objetivo es obtener una cota adecuada de máx keh,n k[x1 ,xM ],h . 0≤tn ≤T El error (8) puede ser descompuesto en tres partes originadas, respectivamente, por la discretización espacial, la incorporación de condiciones de frontera absorbentes y la discretización temporal final. Estamos interesados en este último término que está dado por eeh,n = [(uh (tn ) − uh,n )T , (vh (tn ) − vh,n )T ]T , Con un argumento estándar, resulta (i) ke eh,n k = κh O(∆tp ), donde p es el orden clásico del método Runge-Kutta (i) Por tanto, κh es un valor decisivo para evaluar la estabilidad de la dis(i) cretización completa. Podemos ver en la figura anterior que κh crece con el tamaño de las matrices y con el orden de absorción (cf. [1, 2]). Otra manera de medir la no normalidad de estas matrices de coeficietnes está dada por los llamados pseudoatovalores [5]. La parte real máxima de los ε-pseudoautovalores para N = 512 y h = 0,15625 × 10−2 , que es una medida de la posible inestabilidad numérica, se muestra en tabla siguiente, mostrando un buen comportamiento. ²\ ABC 10−14 10−12 10−10 10−8 10−6 10−4 4. ABC(1,0) 1,09 × 10−11 7,97 × 10−10 8,13 × 10−8 9,85 × 10−6 7,97 × 10−4 5,46 × 10−2 ABC(2,0) 3,02 × 10−12 7,58 × 10−10 7,45 × 10−8 8,57 × 10−6 6,83 × 10−4 4,83 × 10−2 ABC(1,2) 1,63 × 10−12 8,90 × 10−10 7,54 × 10−8 8,11 × 10−6 9,38 × 10−4 6,32 × 10−2 ABC(2,2) 4,83 × 10−12 6,72 × 10−10 6,65 × 10−8 4,87 × 10−6 5,23 × 10−4 5,37 × 10−2 Resultados numéricos Tomamos como condición inicial un perfil gaussiano con soporte incluido en el intervalo computacional. Nuestro primer experimento pretende estudiar la influencia de la discretización espacial y la elección de condiciones de frontera absorbentes sobre el error. Para ello, consideramos un método Runge-Kutta de oren 4 y elegimos un tamaño de paso temporal suficientemente pequeño. En la figura siguiente mostramos la evolución del error frente al tiempo para ABC(2,0) y valores creciente de N . −3 0.02 4 N=512 0.015 2 0.005 1 0 50 100 0 150 −3 1 N=1024 3 0.01 0 x 10 0 50 100 150 −4 x 10 3 2.5 N=2048 0.8 x 10 N=4096 2 0.6 1.5 0.4 1 0.2 0 0.5 0 50 100 0 150 0 50 100 150 Podemos ver que los errores interiores al intervalo y los reflejos decrecen cuando se refina la discretización espacial. Hemos repetido el experimento con las otras tres condiciones de frontera absorbentes y los resultados son similares. −10 5 −10 x 10 5 x 10 4.5 4 4 3.5 3 3 2.5 2 2 1.5 110 120 130 140 150 1 110 −10 5 120 130 140 150 120 130 140 150 −10 x 10 5 4.5 x 10 4.5 4 4 3.5 3.5 3 3 2.5 2.5 2 2 1.5 110 1.5 110 120 130 140 150 Quremos ahora estudiar la influencia en la estabilidad de las discretizaciones (i) totales. Elegimos ABC(2,2), que presenta el peor comportamiento de κh y tomamos un valor muy pequeño de h para conseguir que los errores debidos a la discretización espacial y el error de absorción sean muy pequeños. Finalmente, tomamos un integrador en tiempo de orden 2, A-estable y conservativo. De esta manera, cualquier error originado por la posible inestabilidad temporal es más fácilmente detectado. Mostramos en la figura final la evolución del error frente al tiempo con pasos en tiempo decrecientes. La perturbación observada en la frontera es pequeña y tiene un tamaño similar para todos los valores de ∆t. Cuando ∆t disminuye, las oscilaciones de las soluciones se reducen tanto en tiempo como en duración temporal. Concluimos que, incluso en el peor caso, la inestabilidad es muy pequeña. Bibliografı́a [1] I. Alonso-Mallo, N. Reguera, Weak Ill-posedness of spatial Discretizations of Absorbing Boundary Conditions for Schrödinger-type Equations, SIAM J. Numer. Anal. 40 (2002), 134-158. [2] I. Alonso-Mallo, N. Reguera, Discrete Absorbing Boundary Conditions for Schrödingertype Equations. Construction and Error Analysis, SIAM J. Numer. Anal. 41 (2003), 1824-1850. [3] T. Hagstrom, New results on absorbing layers and radiation boundary conditions. Topics in computational wave propagation, 1–42, Lect. Notes Comput. Sci. Eng., 31, Springer, Berlin, 2003. [4] L. Halpern, Absorbing Boundary Conditions for the Discretization Schemes of the OneDimensional Wave Equation, Math. Comput. Volume 38 (1982), 415–429. [5] L. N. Trefethen, Pseudospectra of linear operators, SIAM Review 39 (1997), 383–406. [6] L. N. Trefethen, L. Halpern, Well-posedness of one-way wave equations and absorbing boundary conditions, Math. Comput. 47 (1986), no. 176, 421–435.