7. Capítulo 2
Anuncio

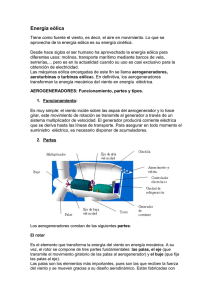
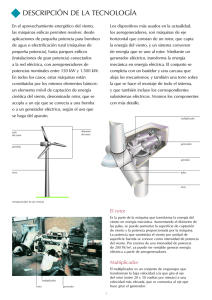
CAPÍTULO 2. Generación eólica 2.1 El Aerogenerador. Tipos y clasificación 2.1.1 Partes de un aerogenerador El aerogenerador es la máquina encargada de transformar la energía cinética del viento en energía eléctrica. Para ello dispone de una parte mecánica, la cual extrae energía mecánica del viento y otra eléctrica, la cual transforma la energía mecánica en eléctrica en condiciones adecuadas para ser evacuada. Para ello, un aerogenerador se compone de los elementos que se muestran en la Fig 2.1.1: Fig 2.1.1. Partes de un aerogenerador 11 CAPÍTULO 2.Generación eólica Imagen extraída de [5]. En la góndola se encuentran los componentes principales del aerogenerador, incluyendo el generador y multiplicador de velocidad. En su parte delantera se encuentra el rotor, formado por las palas y el buje. Las palas son las encargadas de extraer la energía mecánica del viento y transmitirla al buje, en cual está acoplado al eje de baja velocidad. Además de las partes mostradas en la figura, también tiene un mecanismo de orientación activado por un control eléctrico, que sitúa al aerogenerador en la dirección del viento, el anemómetro y la veleta para medir la velocidad y dirección del viento. En [5] se describen las partes más importantes de los aerogeneradores comerciales: Rotor Compuesto por las palas y el buje, es el elemento del aerogenerador que recibe la energía cinética, normalmente está constituido por tres palas. Los bujes son mayoritariamente fijos, reservando los bujes basculantes para el caso de aerogeneradores monopala o bipala, en los que es necesario para relajar las cargas dinámicas que se presentan en este tipo de diseños. Normalmente el rotor se encuentra situado a barlovento. Esta disposición permite reducir las cargas de fatiga, al reducir el efecto de sombra de torre y evitar el ruido aerodinámico producido por las palas cuando el rotor se sitúa a sotavento. Respecto a los perfiles aerodinámicos, los diseños actuales utilizan familias de perfiles avanzados, diseñados específicamente para su utilización en aerogeneradores según criterios de incremento de la captación energética, disminución de cargas, facilidad de fabricación y disminución del ruido aerodinámico, así como mejora de las características de pérdida aerodinámica, disminuyendo la sensibilidad a agentes externos como la suciedad superficial, etc. Las palas, en su mayoría, se construyen de materiales compuestos como fibra de vidriopoliéster y fibra de vidrio epoxy. Actualmente se emplean laminados híbridos fibra de carbón/fibra de vidrio/kevlar con resinas epoxy haciendo las palas más ligeras. Este tipo de palas se emplea sobre todo en aerogeneradores con cambio de ángulo de palas, en los que se impone la ligereza de las palas tanto para disminuir las cargas en los rodamientos de anclaje, como para facilitar los cambios de ángulo de pala rápidos. Sistema de transmisión El multiplicador une los dos ejes, el de baja y el de alta velocidad que está unido al generador eléctrico. Su función es adaptar la velocidad de giro del rotor (alrededor de 20 r.p.m) a la del generador (1500 r.p.m para un generador de dos pares de polos). El eje de alta velocidad está dotado de un freno mecánico de emergencia, que se utiliza en caso de fallo del freno aerodinámico. 12 CAPÍTULO 2. Generación eólica Los tipos de cajas de multiplicación que se utilizan con mayor frecuencia son cajas de ejes paralelos de 2 ó 3 etapas. En la actualidad y especialmente en los nuevos diseños de grandes aerogeneradores se utilizan cajas multiplicadoras de ejes planetarios que permiten diseños más ligeros y compactos. Generador El generador es la parte principal del aerogenerador, ya que su misión es la de transformar la energía mecánica en energía eléctrica. En los aerogeneradores modernos el que más se emplea es el generador asíncrono. Sistema de orientación La mayoría de los aerogeneradores en el mercado utilizan un sistema de orientación asistida mediante un servomotor que acciona los engranajes que actúan sobre la corona dentada del rodamiento de acoplamiento de la góndola con la torre soporte. Los sistemas de orientación pasivos son utilizados principalmente en pequeños aerogeneradores y, en especial los diseños de aerogeneradores con rotor a sotavento. Sistema de regulación de potencia La potencia disponible en una corriente de aire aumenta según una ley cúbica con la velocidad [6]: La potencia captada por el aerogenerador se relaciona con la potencia disponible en el viento mediante el coeficiente de potencia Cp. Este se define como la relación entre la potencia mecánica extraída por la turbina y la potencia total del viento. Todo aerogenerador necesita un sistema de control que permita, por un lado, limitar su velocidad y por el otro optimizar el funcionamiento. Es necesario limitar la velocidad del aerogenerador para evitar tensiones estructurales en el aerogenerador más allá de los límites tolerables. Si la fuerza centrífuga supera la resistencia de la raíz de la pala ésta podría desprenderse. En las tormentas, la dirección del viento cambiante induce a la máquina a cambiar su orientación mientras que la hélice, girando a elevadas revoluciones, tiende a mantener fijo su plano de rotación debido a un efecto giroscópico, aún cuando el eje de la hélice cambia de dirección. Este fenómeno produce un flexión tan importante en las palas que puede hacer que éstas toquen la torre. En general, la potencia está relacionada con la velocidad de viento mediante la curva de potencia del aerogenerador. Esta curva está caracterizada por tres velocidades: - Velocidad de viento de arranque: velocidad del viento para la cual la máquina comienza a generar electricidad. - Velocidad nominal: velocidad del viento para la cual la máquina entrega la potencia nominal. 13 CAPÍTULO 2.Generación eólica - Velocidad de viento de parada: velocidad del viento sobre la cual la turbina debe detenerse para evitar daños en su estructura. Torre La torre de un aerogenerador ha de resistir, por una parte su propio peso, y por otra, la presión que el viento realiza sobre la superficie de las hélices y que tiende a volcar la máquina. Normalmente es una ventaja disponer de torre alta ya que la velocidad del viento aumenta conforme aumenta la altura, aunque, por otro lado el mayor coste de la torre asociado a una mayor altura y resistencia estructural hace que exista un compromiso de diseño. Las torres pueden ser tubulares o de celosía. La mayoría de los aerogeneradores son de tipo tubular en acero, debido a su gran solidez y a su menor impacto visual. La optimización estructural conduce a la forma troncocónica, con una reducción gradual del diámetro desde la base hasta la góndola, aunque ello repercute en mayor complejidad de fabricación y coste superior. 2.1.2 Clasificación Un aerogenerador es una máquina capaz de captar la energía del viento y convertirla en energía eléctrica. El proceso de conversión atraviesa una fase de conversión de energía eólica en mecánica y otra de mecánica en eléctrica. Existen diferentes tipos de aerogeneradores que pueden clasificarse atendiendo a diversos criterios. En [5] se muestran algunas de las posibles clasificaciones: Según la posición del eje de giro: • Aerogeneradores de eje vertical. • Aerogeneradores de eje horizontal, mayoritariamente empleados debido a su mayor rendimiento. Aerogeneradores de eje horizontal atendiendo al número de palas: • La mayoría de aerogeneradores actuales disponen de tres palas, con el rotor a barlovento, usando motores eléctricos en sus mecanismos de orientación. • También existen diseños bipala de aerogeneradores, que tienen la ventaja de ahorrar el coste de una pala y, por supuesto, su peso. Sin embargo, no son muy utilizados debido a que necesitan una mayor velocidad de giro para producir la misma energía de salida. • Aerogeneradores monopala, de muy poco uso por las mismas razones que el anterior 14 CAPÍTULO 2. Generación eólica Aerogeneradores de eje horizontal según la situación del rotor • La mayoría de los aerogeneradores modernos utilizan la disposición a barlovento en las que el rotor o hélice se sitúa delante de la torre, evitándose el efecto de la sombra propia. No obstante, necesitan de un mecanismo de orientación para mantener la posición. • En las turbinas con rotor a sotavento, el rotor o hélice se encuentra aguas abajo de la torre. Como ventaja diremos que no necesita de sistema de orientación. Sin embargo esta manera de orientar a la hélice se ve obstaculizada por la forma en que se puede transmitir la corriente saliente desde el generador. Aerogeneradores de eje horizontal atendiendo a la tecnología de control Los aerogeneradores pueden clasificarse atendiendo al control de velocidad y potencia. Atendiendo a la velocidad con la que gira el rotor, los aerogeneradores pueden clasificarse en: • Aerogeneradores de velocidad fija • Aerogeneradores de velocidad variable Siendo los segundos cada vez más utilizados. En los aerogeneradores de velocidad fija, la velocidad de giro del rotor permanece constante y viene determinada por la frecuencia de la red, la relación de la multiplicadora y el diseño del generador, sin importar la velocidad de viento. En estos, el generador asíncrono está conectado directamente a la red, con un arrancador y un banco de condensadores para compensar la reactiva. Están diseñados para alcanzar una eficiencia máxima a una velocidad determinada. Para incrementar la producción de energía, algunos aerogeneradores de velocidad fija tienen dos juegos de devanados: uno para velocidades de viento bajas y otro con menor número de pares de polos para velocidades medias y altas. Las principales ventajas de los aerogeneradores de velocidad fija son su simplicidad, robustez y fiabilidad, además de su precio. Su principal desventaja es el consumo incontrolable de potencia reactiva y la pobre calidad de la energía generada, ya que todas las fluctuaciones de la velocidad de viento se transmiten como fluctuaciones mecánicas en el par mecánico y éstas pueden provocar fluctuaciones en la tensión. Los aerogeneradores de velocidad variable están diseñados para alcanzar la máxima eficiencia aerodinámica para un amplio rango de velocidades de viento, lo que significa aumentar la potencia generada, suavizar las oscilaciones de potencia debidas a la variabilidad del viento reduciendo las solicitaciones mecánicas del aerogenerador y mejorando la calidad de la energía entregada [7]. 15 CAPÍTULO 2.Generación eólica En la operación a velocidad variable es posible adaptar la velocidad de giro del rotor a la velocidad del viento incidente de forma que opere con un coeficiente de potencia máximo. Además, al contrario que los aerogeneradores de velocidad constante, los aerogeneradores de velocidad variable son capaces de mantener el par del generador prácticamente constante de manera que las fluctuaciones de la velocidad de viento no se transmiten a la red. El sistema eléctrico de los aerogeneradores de velocidad variable es más complicado que los de velocidad fija. Generalmente van equipados con generadores asíncronos o síncronos y se conectan a la red a través de un convertidor de potencia. El convertidor de potencia controla la velocidad del generador, y por tanto, las fluctuaciones de potencia causadas por las variaciones de viento son absorbidas por cambios en la velocidad del rotor. Las principales ventajas de los aerogeneradores de velocidad variable son el incremento de la energía capturada, la mejora de la calidad de la energía entregada y la reducción de las cargas mecánicas. Como principal desventaja está la pérdida de energía en el convertidor de potencia, el uso de más componentes y el incremento del coste debido al uso de la electrónica de potencia. La manera más simple, robusta y barata de hacerlo es el control mediante entrada en pérdida aerodinámica, en la que las palas están sujetas al buje con un ángulo fijo. El diseño aerodinámico del rotor está optimizado para un determinado valor de velocidad de viento de forma que cuando la velocidad de viento supera ese valor existe una pérdida de potencia, es decir, la potencia que las palas pueden extraer del viento en esas condiciones es limitada. Como principal desventaja frente a otros métodos es la menor eficiencia a bajas velocidades de viento. Por otra parte, debido a la imposibilidad de modificar el ángulo de paso de las palas no se puede optimizar el par durante el arranque. Otro tipo de control de potencia consiste en la variación del ángulo de pala o control de pitch, en el que las palas pueden girar en caso de que la potencia captada del viento sea demasiado alta o demasiado baja. Los aerogeneradores provistos de este tipo de control de potencia utilizan un sistema activo de giro de las palas de la siguiente manera [8]: - Durante el funcionamiento a carga parcial el ángulo de calado se mantiene en un valor que hace máxima la potencia desarrollada por la turbina (β ~ 0). - Para velocidades de viento elevadas, el sistema de control del ángulo de paso de pala aumenta el ángulo de paso β para mantener la potencia constante y reducir las fuerzas de empuje en el rotor. Este tipo de control mejora la potencia captada a velocidades de viento altas, además asiste durante la conexión del aerogenerador o en caso de parada de emergencia. La principal desventaja es la complejidad del mecanismo de movimiento de la pala y las mayores fluctuaciones de potencia a velocidades de viento elevadas, ya que la potencia en esos casos fluctúa en torno a la potencia nominal debido a las ráfagas de viento y a la reducida velocidad con la que el sistema es capaz de cambiar el ángulo de la pala. 16 CAPÍTULO 2. Generación eólica Un sistema intermedio es el denominado “entrada en pérdida aerodinámica activa” en el que la entrada en pérdidas de la pala se controla mediante la variación del ángulo de la pala. A velocidades de viento bajas el movimiento de las palas es similar al del control mediante cambio de ángulo de pala, el objetivo es alcanzar la máxima eficiencia, mientras que a velocidades de viento elevadas las palas se mueven en dirección opuesta a la del control de pitch, aumentando de esta manera el efecto de la entrada en pérdidas. Con este sistema, el control de potencia es más suave, sin que se produzcan las variaciones de potencia que se producirán en el control de pitch. Este sistema también puede dar apoyo en caso de arranque o parada de emergencia. A continuación, van a describirse las configuraciones de aerogenerador más empleadas clasificándolas según su control de velocidad y su control de potencia. El aerogenerador de jaula de ardilla Esta configuración permite la generación a frecuencia constante aun cuando la velocidad varía entre un 1 y un 2 % de la nominal por lo que a esta configuración se le denomina de velocidad fija. Está compuesto por un generador asíncrono de jaula de ardilla conectado directamente a la red a través de un transformador, mientras el rotor se encuentra cortocircuitado. En este tipo de aerogeneradores se suelen utilizar arrancadores suaves para la sincronización y conexión a la red, quedando directamente conectados en régimen permanente. • Ventajas El generador asíncrono de jaula de ardilla es el generador más barato, simple, robusto y con menor mantenimiento, lo que hace que sea muy interesante para su aplicación en la generación eólica. • Desventajas No es capaz de generar reactiva y, más aún, la necesidad de consumir reactiva para su magnetización tanto en vacío como a plena carga, lo que hace necesario la utilización de bancos de condensadores. Esta situación empeora en presencia de un hueco de tensión producto de una falta. En estos casos, la máquina consume más reactiva mientras la generación reactiva por parte del banco de condensadores disminuye con el cuadrado de la tensión, es decir, genera menos reactiva cuando más se necesita, poniendo en peligro la estabilidad de tensión del sistema. Los aerogeneradores de velocidad fija convierten las fluctuaciones de la velocidad de viento en fluctuaciones mecánicas y éstas en fluctuaciones de potencia independientemente del sistema de control de potencia empleado. En caso de redes débiles, estas fluctuaciones pueden provocar fluctuaciones de tensión en el punto de conexión. Esta configuración supone una baja inserción de la generación eólica en la red, ya que no ayuda a mantener la estabilidad de frecuencia en la red y deja esa labor a la generación síncrona convencional. 17 CAPÍTULO 2.Generación eólica Desde el punto de vista del promotor de la central eólica, al no poder variar la velocidad de giro implica que no puede seguir el coeficiente de potencia máximo, lo que conlleva una menor extracción de energía a velocidades de viento menores. En este tipo de sistemas la potencia se regula mediante sistemas mecánicos como el ángulo de pala o la pérdida aerodinámica, bien sea activa o pasiva. Además, en ocasiones se emplean generadores con dos devanados, cada uno con diferente número de pares de polos para poder trabajar a dos velocidades. Uno de los devanados con menor velocidad de sincronismo se emplea para bajas potencias, y el otro, de mayor velocidad de sincronismo para potencias mayores Aerogenerador con control dinámico de deslizamiento Esta configuración consiste en aerogeneradores de velocidad variable limitada mediante la variación de la resistencia conectada al rotor. Este sistema emplea generadores asíncronos de rotor bobinado cuyo estator se conecta directamente a la red. Al igual que para el aerogenerador de jaula de ardilla, la conexión a la red se realiza de forma suave mediante el uso de un arrancador. Aerogenerador doblemente alimentado (DFIG) El aerogenerador doblemente alimentado se caracteriza porque el rotor está conectado a la red a través de un convertidor de frecuencia mientras el estator se conecta directamente a la red mediante un transformador. Con esta configuración se consigue controlar la potencia activa y reactiva [9], con bajos niveles de armónicos tanto en el lado del generador como en el de la red. Las prestaciones están limitadas por el dimensionamiento que se haga del equipo. Además, presenta la ventaja de poder entregar a red una potencia superior a la nominal de la máquina en funcionamiento supersíncrono. El tamaño requerido para el convertidor en esta configuración la hace muy atractiva económicamente. Su principal desventaja es el uso de escobillas y la necesidad de protección adicional en caso de faltas en la red. Un hueco de tensión en la red produce un incremento de corriente en los devanados del estator, y, debido al acoplamiento magnético entre estator y rotor, esta corriente también fluirá por el rotor y el equipo de potencia pudiendo llegar a destruirlo [10]. Por esta razón, son incapaces de hacer frente directamente a los huecos de tensión. Ello obliga a disponer de equipamiento suplementario como el denominado “crowbar activo”. Un generador asíncrono de rotor bobinado puede generar una tensión de valor eficaz y frecuencia constante aunque su eje gire a velocidad variable [8] cuando se alimenta el rotor de la máquina con un convertidor de frecuencia compuesto por 18 CAPÍTULO 2. Generación eólica dos convertidores electrónicos CA/CC reversibles [11]. El convertidor conectado al rotor del generador regula la amplitud, la frecuencia y fase de la tensión aplicada al rotor, lo cual permite realizar un control vectorial de la máquina para regular el par electromagnético y el factor de potencia del generador en un amplio margen de velocidades de giro, tanto por encima como por debajo de la velocidad de sincronismo. De forma semejante, el control vectorial del convertidor conectado en el lado de red hace que sea posible realizar una regulación independiente de la potencia activa y reactiva, lo que permite extraer o inyectar la potencia activa generada en el rotor de la máquina y controlar la potencia reactiva intercambiada entre este convertidor y la red. A continuación se explican los fundamentos de su funcionamiento [8]. En una máquina asíncrona cuyo estator está conectado a una red trifásica de frecuencia fs, el campo magnético giratorio tiene una velocidad: Si se alimenta el rotor con un sistema trifásico de tensiones de frecuencia fr, el rotor también creará un campo magnético que girara a una velocidad: Si el rotor está girando a una velocidad n, la velocidad del campo rotórico respecto a un observador fijo será n+nr. Para que una máquina desarrolle un par con un valor medio distinto de cero se precisa que los campos magnéticos de estator y de rotor giren a idéntica velocidad. De lo anterior se deduce, que la relación entre la frecuencia estatórica, la frecuencia rotórica y la velocidad es: La velocidad n puede ser mayor o menor a ns. En caso de ser ns mayor que n la velocidad nr debe ser positiva, sin embargo, en el caso de que ns sea inferior a n, nr debe ser negativa. Debe tenerse en cuenta que el sentido de giro del campo magnético creado por un devanado depende de la secuencia de fases aplicada al devanado, con lo que si se desea que la velocidad del rotor sea mayor a la velocidad de sincronismo se ha de aplicar al rotor un sistema trifásico de secuencia inversa respecto a la del estator. Por el contrario, para conseguir que la velocidad del rotor sea menor a la del campo se debe alimentar el rotor con un sistema trifásico de la misma secuencia que la tensión aplicada al estator. La f.e.m. generada en el rotor depende de la velocidad de giro. De modo que si se denomina Eor a la f.e.m. a rotor parado, la f.e.m. cuando el rotor está en movimiento es: Generador síncrono conectado a través de convertidor Esta configuración permite el control de la velocidad en todo su rango. El estator del generador síncrono se conecta a la red mediante un convertidor. Existes dos tipologías diferentes para el generador síncrono: - Con convertidor de frecuencia con puente rectificador de diodos - Con convertidor de frecuencia con puente rectificador de tiristores La primera tipología es la más empleada ya que el uso de diodos hace que el sistema sea más robusto y barato [8]. En este caso, el control aplicado sobre el generador tiene fundamentalmente dos funciones: gobernar el par de la máquina e 19 CAPÍTULO 2.Generación eólica impedir que se supere la máxima tensión en la etapa de corriente continua. El puente de diodos no permite ninguna acción de control, por lo que en este caso el control del generador se lleva a cabo mediante el devanado de excitación de la generación. En el segundo tipo, los objetivos de control aplicado sobre el generador son gobernar el par de la máquina y mantener constante el factor de potencia. Para mantener constante el factor de potencia se trabaja con el ángulo de disparo del rectificador de tiristores constante. La corriente de excitación del generador se controla de modo que se consiga una relación lineal entre la tensión y la velocidad de giro; ello significa que el flujo en el generador se mantiene constante. Existen otras tipologías que emplean puente rectificador de IGBT’s controlado por modulación del ancho de pulso (PWM) pero no suelen usarse debido a su elevado precio. Las configuraciones de imanes permanentes presentan la ventaja de eliminar el sistema de excitación, aunque a cambio su coste es muy elevado. Además, los generadores de imanes permanentes pueden construirse en configuraciones multipolo que permiten eliminar la caja multiplicadora. Generador asíncrono conectado a través de convertidor Esta configuración, al igual que la anterior, permite el control de la velocidad en todo su rango. El estator del generador se conecta a la red a través de un convertidor. En comparación con al aerogenerador doblemente alimentado, este presenta la ventaja de ser más fiable, robusto y económico. No obstante, tiene el inconveniente de que para la misma potencia del aerogenerador necesita un convertidor de mayor potencia, como mínimo igual a la potencia aparente nominal del generador, debido a que toda la potencia generada se entrega por el estator. El convertidor electrónico consta de dos puentes IGBT’s, uno conectado al estator del generador funcionando como rectificador y otro conectado a la red funcionando como inversor. En esta configuración el puente situado en el lado del generador se encarga de hacer que éste trabaje en las condiciones de máxima eficiencia posible, a la vez que le entrega la corriente de excitación necesaria para cada velocidad. El puente situado en el lado de red, se encarga de entregar la energía, tanto activa como reactiva, con bajo contenido armónico y factor de potencia controlado. A pesar de que el equipo de potencia debe ser dimensionado por lo menos para la potencia nominal aparente, esta configuración despierta mucho interés por la posibilidad de aplicar en aerogeneradores con generador de inducción y arrancador suave, convirtiéndoles de aerogeneradores de velocidad fija a velocidad variable por la sustitución del equipo electrónico. 20 CAPÍTULO 2. Generación eólica 2.2 Conexión de la generación eólica en la red 2.2.1 Introducción Los sistemas eléctricos de potencia están evolucionando para la incorporación de la generación de electricidad por parte de energías renovables sin que esta sufra problemas de inestabilidad. Anteriormente la red se basaba en relativamente pocos generadores síncronos, mientras en la actualidad va adquiriendo el carácter de una red con generación agregada. Con este fin, los operadores del sistema han tenido que desarrollar procedimientos de operación que establecen las condiciones a cumplir por los nuevos generadores, de forma que su incorporación no afecte a la seguridad y fiabilidad del sistema eléctrico de potencia. 2.2.2 Requisitos establecidos por Red Eléctrica de España El operador del sistema en España, Red Eléctrica, regula el funcionamiento de la red de transporte mediante los procedimientos de operación. Tanto las instalaciones pertenecientes a la red de transporte como todas las conectadas a ella deben cumplir estos procedimientos de operación. Los principales procedimientos de operación que afectan a la conexión y funcionamiento de los parques eólicos son: • P.O. 3.7. Programación de la generación renovable no gestionable. • P.O. 12.1. Solicitudes de acceso para la conexión de nuevas instalaciones a la red de transporte. • P.O. 12.2. Instalaciones conectadas a la red de transporte: Requisitos mínimos de diseño, equipamiento, funcionamiento y seguridad y puesta en servicio. • P.O. 12.3. Requisitos de respuesta frente a huecos de tensión de las instalaciones eólicas. El P.O. 3.7 describe los flujos de información y los procesos necesarios para la programación de la generación renovable no gestionable. En él se describen las modificaciones de producción que pueden ser necesarias para garantizar la calidad y la continuidad de suministro. Distingue cinco tipos de reducción de la producción: 1. Congestión en la evacuación de la generación, en caso de que existan sobrecargas inadmisibles en la red de transporte de evacuación debido a un exceso de producción. 21 CAPÍTULO 2.Generación eólica 2. Problemas de estabilidad asociados a la máxima pérdida de generación instantánea que el sistema puede soportar en caso de hueco de tensión. 3. Potencia de cortocircuito, en caso de que el Operador del Sistema detecte potencias de cortocircuito en los nudos de la red de transporte que pongan en peligro la seguridad del sistema. 4. Viabilidad de los balances de potencia, ya que el Operador del Sistema debe asegurar la viabilidad de los balances de potencia activa y reactiva. Para ello, debe tener en cuenta las circunstancias singulares de operación y los límites técnicos de las plantas gestionables que sean imprescindibles para cubrir la demanda en periodos horarios próximos al periodo afectado, de lo que podrán resultar restricciones técnicas sobre las plantas no gestionables. 5. Excedentes de generación no integrables en el Sistema, en caso de que la demanda sea inferior a la prevista y la producción mediante generación renovable no gestionable sea superior a las previsiones. En todos estos casos el Operador del Sistema dará las instrucciones de modificación de la producción de las unidades de generación renovable no gestionable. En este procedimiento se indica que estas medidas se tomarán “sólo en aquellos casos en los que no existan otros medios para evitar dicho riesgo actuando en tiempo real o con la antelación suficiente, bien porque ya se haya actuado sobre la generación gestionable o bien porque el problema a resolver sólo sea resoluble con la actuación sobre la generación renovable no gestionable”. El P.O. 12.1 establece las condiciones y el desarrollo del proceso de acceso y del proceso de la conexión de nuevas instalaciones a la red de transporte o ampliación de la potencia y condiciones declaradas en instalaciones existentes ya conectadas a dicha red. En el anexo 3 de dicho procedimiento se incluyen los datos mínimos que el promotor de la instalación eólica debe facilitar al Operador del Sistema para cursar la solicitud de acceso. El P.O. 12.2 y P.O. 12.3 describen los requisitos de funcionamiento que los generadores eólicos deben cumplir. Dada su importancia, se prestará especial importancia a los huecos de tensión, cuyas condiciones de operación se explican con detalle en el siguiente apartado. 2.2.3 Huecos de tensión Un hueco de tensión es una disminución transitoria de la tensión de alimentación que puede ser provocada, bien por cortocircuitos y fallos en el sistema hasta que son despejados, o por el arranque de motores cercanos, cuyo gran consumo de intensidad provoca grandes caídas de tensión en las redes de alimentación. 22 CAPÍTULO 2. Generación eólica Debido al comportamiento de las instalaciones eólicas frente a huecos de tensión, REE ha elaborado un Procedimiento de Operación en el que se establecen los requisitos que deben cumplir las instalaciones de producción en régimen especial con el fin de garantizar la continuidad de suministro. Según este Procedimiento, el titular de la instalación deberá adoptar las medidas oportunas de diseño y/o control para que todas las instalaciones de generación bajo su titularidad se mantengan acopladas al sistema eléctrico, sin sufrir desconexión debida a huecos de tensión directamente asociados a la existencia de cortocircuitos correctamente despejados que puedan presentarse en el sistema eléctrico. La propia instalación de producción y todos sus componentes deberán ser capaces de soportar sin desconexión huecos de tensión, en el punto de conexión a red, producidos por cortocircuitos trifásicos, bifásicos a tierra o monofásicos, con los perfiles de magnitud y duración indicados en la Fig 2.2.1. Es decir, no se producirá la desconexión de la instalación para huecos de tensión en el punto de conexión a red incluidos en el área sombreada de la Fig 2.2.1. Fig 2.2.1. Hueco de tensión En el caso de cortocircuitos bifásicos aislados de tierra, el área sombreada de hueco de tensión en la que no se deberá producir la desconexión de la instalación será de forma semejante a la de la Fig 2.2.1, pero estando situado el valor del límite inferior de tensión en 0.6 pu, en lugar de 0.2 pu. 23 CAPÍTULO 2.Generación eólica Los tiempos de recuperación del sistema eléctrico representados en la Fig 2.2.1 se verifican, con carácter general, para una producción de origen eólico inferior al 5% de la potencia de cortocircuito en el punto de conexión Además, el Procedimiento de Operación exige que durante faltas, tanto durante el período de mantenimiento de la falta, como durante el período de recuperación de tensión posterior al despeje de la misma, no pueda existir en el punto de conexión a la red, consumo de potencia reactiva por parte de la instalación. No obstante, se admiten consumos puntuales de potencia reactiva durante los 150ms inmediatamente posteriores al inicio de la falta y los 150ms posteriores al despeje de la misma. Para faltas equilibradas trifásicas, que son las que se analizarán en este proyecto, tanto durante el período de mantenimiento de falta, como durante el período de recuperación de tensión posterior al despeje de la misma, no podrá existir en el punto de conexión a la red, consumo de potencia activa por parte de la instalación. No obstante, en este caso se admite también la existencia de consumos puntuales de potencia activa durante los 150ms inmediatamente posteriores al inicio de la falta y los 150ms posteriores al despeje de la misma. Adicionalmente se permiten consumos de potencia activa durante el resto de la falta, siempre que no sean superiores al 10% de su potencia nominal registrada. Tanto durante el período de falta como durante el período de recuperación de tensión posterior al despeje de la misma, la instalación deberá aportar al sistema eléctrico la máxima intensidad posible. Esta aportación de intensidad por parte de la instalación al sistema eléctrico se efectuará de forma que el punto de funcionamiento de la instalación se localice dentro del área sombreada de la Fig 2.2.1, antes de transcurridos 150ms desde el inicio de la falta o desde el instante de despeje de la falta. Así, para tensiones inferiores a 0.85 pu, en el punto de conexión a red, la instalación deberá generar potencia reactiva, mientras que para tensiones comprendidas entre 0.85 pu y el valor de la tensión mínima admisible para la operación normal del sistema eléctrico, la instalación no deberá consumir potencia reactiva. Para valores de tensión superiores a la tensión mínima admisible en operación normal aplicará lo establecido en los procedimientos de operación para dicha operación normal. 24 CAPÍTULO 2. Generación eólica Fig 2.2.2. Áreas de funcionamiento admisible durante el período de falta y recuperación Con los actuales Procedimientos de Operación, REE quiere que los parques eólicos no sólo mantengan la continuidad del suministro ante los huecos de tensión, sino que también aporten potencia adicional al sistema para contribuir a su recuperación. 25 CAPÍTULO 2.Generación eólica 26