Antes que nada gracias a dios. - Biblioteca
Anuncio

Antes que nada gracias a dios.
A mis padres, Ramón y Felipa, a mis hermanos y especialmente a mi novia Zulema.
A mis amigos y compañeros del ITSON
A mis maestros
A Héctor mi asesor
Por su cariño, motivación y confianza.
ÍNDICE
LISTA DE TABLAS ............................................................................................. a
LISTA DE FIGURAS .............................................................................................. i
RESUMEN ............................................................................................................. V
INTRODUCCIÓN ................................................................................................... A
OBJETIVOS ........................................................................................................... B
I.
INTRODUCCIÓN AL ESTUDIO DE CORTOCIRCUITO
Importancia de un estudio de corto circuito........................................ 2
Transitorios en circuitos RL en serie................................................... 4
Fuentes de corrientes de corto circuito................................................ 6
Comportamiento de la máquina sincrona durante fallas..................... 7
II
DIAGRAMAS
EQUIVALENTES
PARA
EL
ESTUDIO
CORTOCIRCUITO
2.1
Diagramas equivalentes de los elementos del circuito...................... 18
2.2
Diagramas de impedancia y reactancia............................................. 20
2.3
Cantidades por unidad…………………………………………….. 22
DE
III
IV
V
COMPONENTES SIMÉTRICAS
3.1
Teoría de las componentes simétricas……………………………... 27
3.2
Componentes simétricos de vectores asimétricos………………..… 31
3.3
Impedancias de secuencia y redes de secuencia…………………… 34
3.4
Redes de secuencia positiva y negativa………………………......... 35
3.5
Redes de secuencia cero………………………………………….... 36
MATRIZ DE IMPEDANCIAS DE BARRA
4.1
Introducción…………………………………………………..….…. 46
4.2
Matriz nodal de admitancias………………………………………... 47
4.3
Matriz nodal de impedancias……………………………………….. 49
4.4
Significado de la matriz de impedancias…………………………… 50
4.5
Características de matrices………………………………………….. 52
4.6
Teorema de Thévenin y Zbus……………………………………… 53
4.7
Modificación de una Zbus existente…………………………...…... 60
4.8
Determinación directa de Zbus…………………………………….. 68
CÁLCULO DE FALLAS UTILIZANDO ZBUS
5.1
Introducción……………………………………………………….. 70
5.2
Fallas simétricas(falla trifásica)…………………………………… 72
5.3
Fallas asimétricas………………………………………………….. 78
5.3.1 Falla de fase a tierra.....……………………………….……………. 88
5.3.2 Falla de fase a fase………………….…………………………….… 91
5.3.3 Falla de doble línea a tierra………………………………………… 93
VI
DESCRIPCION DEL PROGRAMA PARA EL CÁLCULO DE LA
CORRIENTE DE CORTOCIRCUITO
6.1
Descripción general del programa ………………………………….……… 97
CONCLUSIONES.................................................................................................. 104
BIBLIOGRAFIA……………………………………………………………….… 105
a
LISTA DE TABLAS
Tabla 4.1
Características de las Matrices Y y Z……………………………….. 52
Tabla 4.2
Modificación de la Zbarra existente…………………………………. 67
i
LISTA DE FIGURAS
Figura 1.1. Corriente en función del tiempo en un circuito RL para
α - θ = 0…….. 5
Figura 1.2. Corriente en función del tiempo
de un circuito RL cuando α - θ = ± π /2………………………………….. 5
Figura 1.3
Diagrama vectorial de un Generador con rotor cilíndrico, con corriente
atrasada……………………………………………………………………. 9
Figura 1.4. Circuito equivalente de un generador con rotor de polos lisos………….. 10
Figura 1.5
Diagrama vectorial de un Generador con rotor de polos salientes, con
corriente atrasada……………………………………………………...… 11
Figura 1.6
Diagramas vectoriales del generador con rotor polos salientes, con
corriente atrasada……………………………………………………… 12
Figura 1.7
Corriente en función del tiempo en un generador cortocircuitado
funcionando en vacío. La corriente unidireccional transitoria de la
corriente ha sido eliminada………………………………………………. 13
Figura 2.1
Diagrama equivalente de un generador síncrono………………………... 18
Figura 2.2
Diagrama equivalente de un transformador de dos devanados…………. 18
Figura 2.3
Diagramas equivalentes de líneas de transmisión, dependiendo de su
longitud. ……………………………………………………………….... 20
Figura 3.1
Conjuntos de vectores equilibrados que son los componentes
simétricos de tres vectores desequilibrados…………………………...… 28
Figura 3.2 Suma gráfica de los componentes representados en la figura 3.1
para obtener tres vectores desequilibrados………………………………. 29
ii
Figura 3.3
Diagrama vectorial de las potencias del operador “a”…………………. 30
Figura 3.4
Redes de secuencia cero para cargas conectadas en Y………………… 38
Figura 3.5
Carga conectada en delta y su red de secuencia cero………………….. 39
Figura 3.6
Circuitos equivalentes de secuencia cero de transformadores trifásicos
junto con los esquemas de conexiones y símbolos para diagramas
unifilares……………………………………………………………….. 43
Figura 3.7
Diagrama unifilar de un sistema de energía pequeño
y su red de secuencia cero equivalente………………………………… 44.
Figura 3.8
Diagrama unifilar de un sistema de energía pequeño
y su red de secuencia cero equivalente………………………………… 44
Figura 4.1 Determinación de la ecuación nodal para el nodo i………………….… 47
Figura 4.2 Distribución de corrientes en un sistema con una sola inyección de
Corriente……………………………………………………………….. 51.
Figura 4.3. a) Red original con la barra K y el nodo de referencia extraídos ……... 56
Figura 4.4. a) Red original con fuentes de corriente ΔIJ en la barra J y ΔIK en la barra K;
b) circuito equivalente de Thévenin; c) conexión de corto circuito;
d) impedancia Z b entre las barras J y K………………………………. 59.
Figura 4.5. Adición de una barra nueva P que se conecta a través de una impedancia
Z b a una barra K existente…………………………………………….. 61
Figura 4.6
Adición de una impedancia Z b entre las barras existentes J y K……. 66
Figura 5.1
Falla trifásica en un sistema de potencia……………………………… 72
Figura 5.2
Diagrama de reactancias del equivalente monofásico de
una red trifásica balanceada…………………………………………. … 73
Figura 5.3
Circuito que muestra una falla trifásica en la barra 2 simulada
por V f y - V f en serie…………………………………………….…… 74
iii
Figura 5.4
Diagrama unifilar de un sistema trifásico, tres redes de secuencia
del sistema y el equivalente de Thévenin de cada red para la falla en P, que
se denomina barra K…………………………………………………… 82
Figura 5.5
Falla de fase a tierra en un sistema de potencia……………………….. 88
Figura 5.6 Conexión de los equivalentes de Thévenin de las redes de secuencia para
simular una falla monofásica a tierra de la fase a en la barra K……... 90
Figura 5.7
Falla de fase a fase en un sistema de potencia en la barra K………… 91
Figura 5.8
Conexión de los equivalentes de Thévenin de las redes de secuencia
positiva y negativa para una falla línea a línea entre las fases b y c en la
barra K del sistema…………………………………………………… 92
Figura 5.9
Falla de dos fases a tierra en un sistema de potencia. El punto de falla se
denomina barra K…………………………………………………….. 93
Figura 5.10 Conexión de los equivalentes de Thévenin de las redes de secuencia para
una falla bifásica a tierra de las fases b y c en la barra K……………. 94
Figura 6.1
Diagrama a bloques de los pasos a seguir del programa de cortocircuito
………………………………………………………………………. 97
Figura 6.2 Sistema eléctrico de potencia pequeño, con falla de línea a tierra en la
barra 3……………………………………………………………………………….101
V
RESUMEN
El contenido de este trabajo trata del estudio de cortocircuito en sistemas eléctricos de
potencia, siendo apoyado mediante un programa computacional, para el cálculo del
mismo.
El primer capítulo trata de la importancia del estudio de cortocircuito, las fuentes que
son aportadoras de corriente y el estudio de la máquina síncrona.
El segundo capítulo comprende los diagramas equivalentes de los diferentes elementos
que componen un sistema eléctrico de potencia, así como también de los diagramas de
impedancia y reactancia y las cantidades por unidad.
El estudio de las componentes simétricas ocupa el tercer capítulo, al igual que las redes
de secuencia del sistema.
En el capítulo cuatro se aborda la matriz de impedancia de barra, su significado y una
comparación con la matriz de admitancia de barra, así como también del teorema de
Thévenin.
En el quinto capítulo se estudian los diferentes tipos de fallas, como lo son la falla
trifásica, falla línea a tierra, falla línea a línea y la falla de dos líneas a tierra, haciendo
uso de la matriz de impedancias de barra.
V
VI
En el sexto y último capitulo se describe del programa computacional, en el cual nos
apoyaremos para el cálculo de la corriente de cortocircuito, con un ejemplo
implementado.
En este trabajo se logra conjuntar la teoría del cálculo y el diseño básico de un software
para el análisis de cortocircuito, siendo este para fines académicos.
VI
A
INTRODUCCIÓN
El estudio de cortocircuito, es importante para diseñar y operar sistemas eléctricos de
potencia, ya que nos permite seleccionar las capacidades de interruptores, cables, así
como también, los ajustes de los relevadores que operan a los interruptores.
Un estudio de este tipo tiene que ser exacto, ya que si seleccionamos mal las
capacidades de los elementos, podría ser peligroso, en caso de seleccionarlos por debajo
de la corriente verdadera de cortocircuito y puede ser muy costosa para el caso de andar
muy por encima de la corriente real.
El motivo de este trabajo es disponer de una herramienta que es muy importante en este
tipo de estudio y además muy rápida, como lo es un programa computacional, que nos
evita el problema de estar realizando largos y cansados cálculos, cada vez que se quiera
analizar una falla en un sistema.
Este trabajo será de gran beneficio para los alumnos que quieran analizar las corrientes
de cortocircuito en un sistema eléctrico de potencia (SEP), ya que la realización del
programa es puramente para fines académicos, y se invita a continuar la mejoría de este.
El objetivo de este proyecto es de presentar
los conocimientos necesarios para
comprender un estudio de cortocircuito y así poder llevar a cabo un análisis mediante un
programa para su estudio.
B
OBJETIVOS
Al término de la lectura de este libro, se espera que se comprendan los conceptos que
intervienen en el cálculo de cortocircuito, siendo herramienta principal la matriz de
impedancia de barra y las componentes simétricas.
Otra de las finalidades es desarrollar un algoritmo para un programa de cortocircuito y
que el lector pueda aprovechar el programa que viene con el proyecto, para poder
realizar análisis de cortocircuito en diferentes barras en un sistema eléctrico de potencia.
CAPÍTULO I
INTRODUCCIÓN AL ESTUDIO DE
CORTOCIRCUITO
2
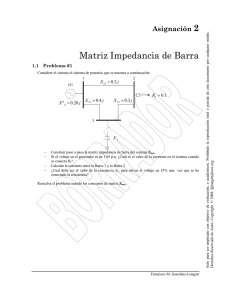
1.1 Importancia de un estudio de cortocircuito.
Un cortocircuito es una conexión anormal que genera un camino de baja impedancia, y
por lo tanto un excesivo flujo de corriente. En un Sistema Eléctrico de Potencia se
considera a los cortocircuitos como FALLAS y se clasifican según su naturaleza; cada
tipo de falla involucra distintas condiciones de operación y cada una debe estudiarse en
forma separada para lograr comprenderlas de una mejor manera. Los cortocircuitos o
fallas más comunes en un sistema eléctrico de energía son las de fase a tierra, debidas a
innumerables causas, las más comunes son descargas atmosféricas sobre aisladores y la
contaminación orgánica por aves que proporcionan un camino a tierra para la corriente.
Este tipo de fallas constituyen entre un 70 y 80% del total de fallas ocurridas. Le siguen
en nivel de ocurrencia las fallas de fase a fase y por último representando un 5% del
total se encuentran las fallas trifásicas.
Cualquier tipo de cortocircuito provoca un incremento de corriente y abatimiento de
voltaje, condiciones indeseables en sistemas eléctricos de energía, de tal forma que los
sistemas de protección deben de aislar
la falla en el menor tiempo posible,
desenergizando la sección donde ocurrió la perturbación. Por lo tanto es de vital
importancia conocer el valor de la corriente al ocurrir un cortocircuito en cualquier
punto del sistema para seleccionar los interruptores de potencia que deberán de
interrumpir la corriente para aislar la falla; además para el ajuste de los relevadores y
equipo de protección que activan el disparo de los interruptores que deben aislar una
parte del sistema cuando la corriente y voltaje salgan de sus límites normales.
3
La corriente que circula por los distintos puntos de la red, inmediatamente después de
ocurrir una falla, es diferente de la que circula unos pocos ciclos después, poco antes de
enviar la orden de disparo a los interruptores para que corten la corriente a los dos lados
de la falla; y ambas corrientes son distintas a la de régimen estacionario, si la falla no se
hubiera aislado al abrir interruptores. Para seleccionar un interruptor deben considerarse
dos factores indispensables; el primero la corriente máxima que pasa inmediatamente
después de presentarse la falla; y el segundo el valor de la corriente que el interruptor
debe de cortar. Por ello el estudio de cortocircuito tiene por objeto determinar estas
corrientes para los diferentes tipos de fallas, en diferentes puntos de la red, para que a
partir de los datos obtenidos se seleccionen interruptores, transformadores de corriente,
conductores, etc.; así como los valores de ajustes de los diferentes relevadores de
protección para aislar la falla.
La protección inadecuada contra cortocircuito es frecuentemente la causa de fallas de
gran magnitud, que ocasionan daños cuantiosos, interrupción de energía, lesiones al
personal e interrupciones costosas. Por lo tanto es de suma importancia determinar con
exactitud la índole del cortocircuito en un sistema de potencia eléctrico.
4
1.2
Transitorios en circuitos RL en serie.
Cuando se aplica una tensión alterna a un circuito con valores constantes de resistencia
e inductancia, considerando V = Vmax Sen (wt + α ), siendo t = 0 en el momento de
aplicar la tensión por lo tanto α determina el módulo de la tensión cuando se cierra el
circuito. Si la tensión instantánea es cero y aumenta en sentido positivo cuando se
aplica, α vale cero. Si la tensión instantánea tiene su valor instantáneo máximo positivo
α vale π / 2.
La ecuación diferencial es:
Cuya solución es:
En donde
Y
El primer término varía con el tiempo en forma senoidal, el segundo término disminuye
exponencialmente con una constante de tiempo L / R; este término se denomina
componente continua de la corriente . El término senoidal es el valor de régimen
permanente de la corriente en un circuito RL para la tensión aplicada dada.
5
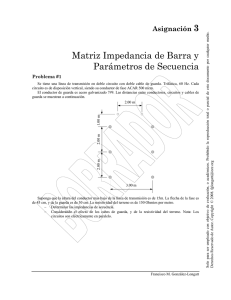
El término continuo no existe si el circuito se cierra en un punto de la onda de tensión
tal que α - θ = 0
ó α - θ = π . La figura 1.1 representa la variación de la corriente,
de acuerdo a la ecuación cuando α - θ = 0.
Figura 1.1. Corriente en función del tiempo en un circuito RL para
α - θ = 0.
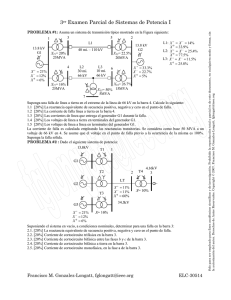
Si el interruptor se cierra en un punto de la onda de tensión tal que α - θ = ± π /2, la
componente continua tiene un valor inicial máximo que es igual a la amplitud máxima
de la corriente senoidal. La figura 1.2 muestra la variación de la corriente de acuerdo a
la ecuación cuando α - θ = ± π /2.
Figura 1.2. Corriente en función del tiempo de un circuito RL
Cuando α - θ = ± π /2.
6
La componente continua puede tener un valor cualquiera desde 0 hasta Vmax / Z,
según el valor instantáneo de la tensión al cerrar el circuito y del factor de potencia del
circuito. En el instante de aplicar la tensión, las componentes continua y permanente
tienen siempre el mismo valor absoluto, pero son de signo opuesto, para expresar el
valor cero de la corriente en ese instante.
Es importante el conocimiento de transientes en circuitos serie RL, por que el
comportamiento del generador síncrono en cortocircuito es similar, ya que su circuito
equivalente esta compuesto de una reactancia y una resistencia en serie con un voltaje
generado, pero existen unas diferencias que se verán mas adelante
1.3
Fuentes de corrientes de cortocircuito.
La magnitud de las corrientes de cortocircuito depende de las diversas fuentes que las
generan, de sus reactancias y de las reactancias del sistema hasta el punto de la falla.
Las fuentes de corriente de cortocircuito son: generadores, motores síncronos y de
inducción.
Los generadores del sistema están impulsados por motores primarios, como turbinas de
vapor o gas, motores diesel y ruedas hidráulicas. Cuando se presenta un cortocircuito, la
energía primaria impulsa al generador y este continúa produciendo voltaje, ya que la
excitación del campo se mantiene debido a la rotación del generador a velocidad
normal. Este voltaje produce una corriente de gran magnitud que fluye hacia la falla.
7
Los motores síncronos se comportan en forma similar a los generadores síncronos
Cuando ocurre una falla y el voltaje del sistema se reduce a un valor muy bajo, el motor
síncrono deja de tomar energía del sistema para continuar su rotación y comienza a
disminuir su velocidad, pero la inercia de la carga tiende a evitar que esta disminución
sea muy rápida. De este modo la inercia hace las veces de un motor primario y dado que
la excitación se mantiene, el motor se comporta como un generador suministrando
corriente de cortocircuito durante varios ciclos después de que ocurre el cortocircuito.
Los motores de inducción aportan corriente de cortocircuito cuando, después de
ocurrir una falla, el motor continúa en movimiento debido a la inercia de la carga y el
rotor y se comporta como un generador. El flujo de campo del motor de inducción se
produce por la inducción del estator. Debido a que este flujo disminuye rápidamente
después de la falla, la aportación del motor de inducción disminuye con rapidez y
desaparece por completo después de unos pocos ciclos.
1.4
Comportamiento de la máquina síncrona durante fallas
La corriente que circula cuando se cortocircuita un alternador es similar a la que circula
cuando se aplica súbitamente una tensión alterna a una resistencia y a una inductancia
en serie. Sin embargo hay diferencias significantes, porque la corriente en el inducido
afecta al campo giratorio.
8
Los generadores síncronos son de dos tipos, dependiendo de la velocidad de la turbina.
Con turbinas de vapor, son posibles altas velocidades 3600, 1800 r.p.m. para 60 Hz con
dos y cuatro polos respectivamente; debido a la gran velocidad periférica se requiere
que el rotor sea cilíndrico o sea fabricado de una sola pieza de acero forjado con ranuras
longitudinales donde se aloja el devanando de los polos.
Con turbinas hidráulicas la velocidad varía en un rango de 150 a 600 r.p.m. a 60 Hz,
dependiendo del tipo de rueda móvil de la turbina y de la carga hidrostática; debido a
que la velocidad periférica es pequeña, se requiere que el estator sea de gran diámetro
con un número grande de polos. Estas máquinas tienen polos laminados sujetos al
“Spider” razón por la cual se designan como de “polos salientes “.
Desde el punto de vista eléctrico existen dos diferencias entre las máquinas con rotor de
polos lisos y las de polos salientes. La primera: las variaciones cíclicas del rotor con
respecto a la velocidad síncrona se amortiguan mediante la producción de corrientes
parásitas en el rotor.
La máquina de polos salientes no es autosuficiente para
amortiguar esas desviaciones, es por esto que generalmente se adiciona el devanado
amortiguador, que no es otra cosa que una jaula de ardilla ubicada en la superficie de
los polos, donde las corrientes inducidas pueden circular. La segunda y más importante
diferencia es que la reluctancia del entrehierro en la de rotor liso es casi uniforme en
toda la circunferencia del rotor; en la de polos salientes varía enormemente de un valor
máximo entre polos (eje q) a un valor mínimo frente a la superficie del polo (eje d); es
por esta razón que los dos tipos de máquinas tienen para el análisis de regulación
diagramas vectoriales distinto.
9
Una máquina de rotor liso puede ser representada mediante un circuito equivalente
previa aceptación de los siguientes razonamientos: El flujo en el entrehierro se
considera como la suma vectorial de dos flujos, uno producido por el campo y otro por
la reacción de armadura (la corriente de armadura produce este último); éstos flujos se
pueden traducir también como fmm generadas y así:
Figura 1.3 Diagrama vectorial de un Generador con rotor cilíndrico, con corriente
atrasada.
Er, el voltaje en el entrehierro es la suma vectorial de E, voltaje de excitación y Ea
generado por la reacción de armadura.
Entonces:
E - j Ia Xm = Er
Xm es una constante de proporcionalidad relacionando Ea con Ia y se denomina
reactancia magnetizante.
10
Er, el voltaje en el entrehierro difiere del voltaje terminal (V) sólo por la caída en la
resistencia (I a) y la reactancia de dispersión de la armadura (X l) o sea:
Figura 1.4. Circuito equivalente de un generador con rotor de polos lisos
Xl, involucra no sólo el flujo de dispersión sino también el flujo asociado con las
armónicas creadas debido a que el flujo no es senoidal.
Xs, se conoce como reactancia síncrona y en este caso (rotor liso) Xd = Xs
Para la máquina de polos salientes los conceptos anteriores no son aplicables por la
siguientes razones: el flujo ϕ
e
(con la máquina en vacío produce la fem. E) se
modifica por el flujo ϕ a (reacción de armadura) de tal modo que el flujo resultante ϕv
genera el voltaje terminal V.
11
Figura 1.5 Diagrama vectorial de un Generador con rotor de polos salientes, con
corriente atrasada.
Este voltaje se obtiene si ϕa se resuelve en dos componentes, una en fase con E (eje en
cuadratura q) y otra a 90° (eje directo d).
El ángulo ϕ
q
causa un desfasamiento de ϕ
v
; ϕ
d
refuerza o debilita a ϕe ,
dependiendo del factor de potencia. Evidentemente, la reluctancia en eje en cuadratura
(trayectoria en aire) es mayor que la reluctancia en eje directo (trayectoria en hierro) y
como cualitativamente
Flujo = fmm / Reluctancia
Inductancia = flujo / corriente
Xd > Xq
X d = X l + Xϕ d
X q = X l + Xϕ q
12
Figura 1.6 Diagramas vectoriales del generador con rotor polos salientes, con corriente
atrasada.
Cuando el rotor gira para generar el valor máximo de voltajes en orden ABC se dice que
la secuencia es ABC. Aceptado que el rotor gira a velocidad síncrona también no habrá
movimiento relativo entre el rotor y el campo producido por el estator y por lo tanto no
habrá fem inducida en campo ni corrientes parásitas en el hierro del rotor.
Si invertimos la secuencia del estator, existirá una frecuencia relativa entre el campo del
estator y los conductores y metal del rotor de 120 ciclos; la máquina se comporta como
un transformador con secundario en cortocircuito, operando a 120 ciclos cuya reactancia
se llama REACTANCIA DE SECUENCIA NEGATIVA;
es generalmente más
pequeña que Xd ó Xq en la máquina de polos lisos, es igual a ( Xd + Xq) / 2 en la de
polos salientes.
Para analizar el efecto de un cortocircuito en las terminales de un alternador sin carga,
un procedimiento excelente consiste en tomar un oscilograma de la corriente de corto
13
circuito en una de la fases al presentarse la falla. Como las tensiones generadas en las
fases de una máquina trifásica están desfasadas unas de otras en 120° eléctricos, el
cortocircuito se aplica en puntos diferentes de la onda de tensión de cada fase. Por esta
razón la componente unidireccional o de régimen transitorio de la corriente es diferente
en cada fase.
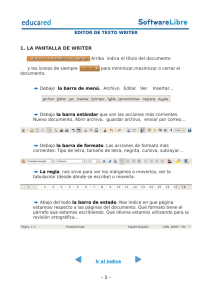
Si se elimina la componente continua de la corriente de cada fase, la representación
gráfica de la corriente de cada fase en función del tiempo corresponde a la figura
siguiente
Figura 1.7 Corriente en función del tiempo en un generador cortocircuitado
funcionando en vacío. La corriente unidireccional transitoria
de la corriente ha sido eliminada.
14
La corriente de armadura crece y dado que el factor de potencia de ésta es atrasado y
muy pequeño, el efecto de la reacción de armadura es netamente desmagnetizante.
El flujo en el entrehierro es mucho mayor en el instante en que se produce el
cortocircuito que unos pocos ciclos más tarde. La reducción del flujo se debe a la fmm
de la corriente en la armadura, o sea a la reacción de inducido.
Sin embargo, el flujo en los polos, debido a la inductancia grande del circuito de campo,
no puede cambiar instantáneamente y como respuesta natural, se induce una corriente
en el campo que se opone al cambio y que tendrá la misma dirección que la corriente If,
antes de aplicar el cortocircuito. Al final de cuentas, la reacción de armadura logra
modificar el flujo principal, no sólo en el entrehierro sino también en el hierro, de tal
modo que la corriente de armadura decrece exponencialmente hasta estabilizarse en un
valor.
En la figura 1.7 la distancia oa es el valor máximo de la corriente de cortocircuito en
régimen permanente (I). La tensión en vacío del alternador Eg dividida por la corriente
I, se llama reactancia síncrona del alternador o reactancia sincrónica directa Xd,
puesto que el factor de potencia es bajo durante el cortocircuito se desprecia la
resistencia relativamente pequeña del inducido.
Si la envolvente de la onda de corriente se hace retroceder hasta el instante cero y se
desprecian unos pocos ciclos en los que el decremento es muy rápido, la intersección
determina la distancia ob , este valor de corriente es conocido como corriente en
régimen transitorio ( I’ ) o simplemente corriente transitoria, en este caso se puede
15
definir la reactancia transitoria o reactancia transitoria directa X’d , que se obtiene al
dividir Eg entre I’ para un generador funcionando en vacío antes del fallo.
El valor eficaz de la corriente determinado por la intersección de la envolvente con el
eje de ordenadas en el tiempo cero, se denomina corriente subtransitoria (I ’’), distancia
oc en la figura 1.7. A este valor de corriente se le conoce como corriente eficaz
simétrica inicial, lo que es más descriptivo porque lleva consigo la idea de despreciar la
componente continua y tomar el valor eficaz de la componente alterna de la corriente,
inmediatamente después de presentarse el fallo. La reactancia subtransitoria directa
X’’d para un alternador que funciona en vacío antes de presentarse la falla trifásico en
sus terminales es Eg / I’’.
Las corrientes y reactancias antes estudiadas vienen definidas por las ecuaciones
siguientes:
I =
Siendo
=
I’ =
=
I’’ =
=
16
I
=
Corriente permanente, valor eficaz
I’
=
Corriente transitoria, valor eficaz
I’’
= Corriente subtransitoria, valor eficaz.
Xd
= Reactancia sincrónica directa
X’d
= Reactancia transitoria directa
X’’d =
Eg
Reactancia subtransitoria directa
= Valor eficaz de la tensión entre una fase y el neutro, en vacío
CAPÍTULO II
DIAGRAMAS EQUIVALENTES PARA EL
ESTUDIO DE CORTOCIRCUITO
18
2.1
Diagramas equivalentes de los elementos del circuito.
Para cada elemento de un sistema eléctrico de potencia existe un modelo o circuito
equivalente que asemejan el comportamiento del aparato y nos facilitan el cálculo y la
simulación de distintos eventos.
Como se mencionó anteriormente un sistema trifásico balanceado se puede representar
con un circuito monofásico, fabricado con los siguientes diagramas equivalentes:
Figura 2.1 Diagrama equivalente de un generador síncrono
La máquina síncrona se puede representar con una fuente de voltaje que asemeja el
voltaje generado de línea a neutro y una impedancia que representa la impedancia de
líneas a neutro bajo cargas balanceadas. Los devanados de las máquinas se pueden
conectar en Delta o Estrella; si la conexión es en delta, se debe reemplazar por una
estrella equivalente.
Figura 2.2 Diagrama equivalente de un transformador de dos devanados
19
En el estudio de cortocircuito se desprecian las corrientes de excitación y de pérdidas y
el circuito se transforma en el circuito mostrado en la figura 2.2., para el caso del
transformador.
Si el estudio se hace en alta tensión, por lo general la resistencia se desprecia y entonces
sólo se considera una inductancia. De aquí se concluye que el circuito equivalente que
se use debe corresponder a la precisión del problema.
La clasificación de líneas de transmisión
según su longitud, está basada en las
aproximaciones admitidas al operar con los parámetros de la línea. La resistencia, la
inductancia y capacitancia están uniformemente repartidas a lo largo de la línea y en el
cálculo exacto de líneas largas hay que considerarlo así. En líneas de longitud media se
considera que la mitad de la capacitancia está agrupada en cada extremo de la línea, sin
que por ello se cometa un error apreciable al calcular voltaje y corriente en sus
terminales. Por último en líneas cortas se desprecia la susceptancia capacitiva por ser
tan pequeña. Se consideran como líneas cortas las líneas aéreas a 60 Hz, de menos de 50
millas, las líneas de longitud media son aquellas comprendidas entre 50 y 150 millas,
aproximadamente, y las líneas de más de 150 millas se consideran líneas de longitud
larga.
Las cargas de un sistema eléctrico de potencia son en su inmensa mayoría de factor de
potencia atrasado, es decir, se componen de resistencia e inductancia, pero en un estudio
de corto circuito se supone que en el sistema no fluye corriente de carga antes de
simular una falla, para así simplificar el procedimiento aproximando los resultados a los
valores reales.
20
(a)
(b)
Figura 2.3 Diagramas equivalentes de líneas de transmisión, dependiendo de su
longitud.
(a) Línea corta; (b) Línea media
2.2 Diagramas de impedancia y reactancia.
Para estudiar el comportamiento de un sistema en condiciones de carga o al presentarse
un cortocircuito, el diagrama unifilar tiene que transformarse en un diagrama de
impedancias que muestre el circuito equivalente de cada componente del sistema,
referido al mismo lado de uno de los transformadores.
21
El diagrama de impedancias no incluye las impedancias limitadoras de corriente entre
los neutros de los generadores y tierra, porque en condiciones de equilibrio, no circulan
corrientes por la tierra y los neutros de los generadores están al mismo potencial que el
neutro del sistema.
En este diagrama se hacen las siguientes simplificaciones para efectuar un cálculo de
fallas:
La admitancia en paralelo de un transformador se suprime normalmente en el circuito
equivalente ya que la corriente magnetizante de éste, es insignificante comparada con la
corriente a plena carga.
Las cargas que no incluyen máquinas giratorias, tienen poco efecto sobre la corriente
total de la línea durante la falla, por lo que, frecuentemente se omiten.
La resistencia se omite ya que la reactancia inductiva de un sistema es mucho mayor
que su resistencia. La resistencia y la reactancia inductiva no se suman directamente y la
impedancia no es muy diferente de la reactancia inductiva si es muy pequeña la
resistencia.
Se desprecia también la capacitancia de las líneas de transmisión para simplificación.
Estos diagramas de impedancias y reactancias se conocen como diagramas de secuencia
positiva, puesto que representan impedancias para las corrientes equilibradas de un
sistema trifásico simétrico.
22
Cuando se representa un transformador por un circuito equivalente, no hay
transformación de voltaje correspondiente a la transformación de voltaje real. La
corriente en ambos extremos del circuito equivalente es idéntica si se desprecia la
corriente magnetizante. En un transformador real, la corriente en el devanado primario
sería igual a la del devanado secundario únicamente si los dos devanados tuvieran el
mismo número de vueltas. En un circuito en el que los transformadores están
representados por sus circuitos equivalentes, las impedancias adecuadas son las del
circuito real, referido al lado del transformador para el que se construye el circuito
equivalente.
Para transferir el valor óhmico de la impedancia desde el nivel de voltaje sobre un lado
del transformador trifásico hasta el nivel de voltaje en el otro lado, el factor de
multiplicación es el cuadrado de la relación de los voltajes línea a línea sin importar la
conexión de transformador.
2.3
Cantidades por unidad.
Con frecuencia se expresa el voltaje, la corriente, la potencia y la impedancia de un
circuito en porcentaje, o bien, por unidad de un valor base o de referencia que se elige
para cada una de tales magnitudes. Por ejemplo, si se selecciona un voltaje base de 120
kV, los voltajes cuyos valores sean 108, 120 y 125 kV se transforman en:
= 0.9
23
= 1.0
= 1.041
90, 100 y 104.1 % respectivamente.
El valor por unidad de una magnitud cualquiera se define como el cociente de su valor
a un valor base expresado como decimal.
El valor porcentaje es 100 veces el valor por unidad. Los valores por unidad o en
porcentaje son mucho más sencillos de manejar que si se usan Volts, amperes o
Voltamperios. El método por unidad tiene una ventaja sobre el método en porcentaje, y
es que el producto de dos magnitudes que se expresan en aquel, está a su vez expresado
por unidad, en tanto que el producto de dos cantidades expresadas en porcentaje tienen
que dividirse por 100 para obtener el resultado en porcentaje.
En sistemas monofásicos:
Con voltaje y kVA como las dos cantidades base independientes y la base
numéricamente igual a la base en kVA, se tienen las siguientes relaciones:
Corriente base (A) =
Impedancia base (Ω) =
Impedancia base (Ω) =
24
Una impedancia Z dada en Ohms se puede expresar en porcentaje o por unidad de
impedancia base.
Z (%) =
* 100
Z (%) =
Y por unidad
despejando
donde
kVAbase = kVA monofásicos
kV base = Voltaje monofásico en kV
En sistemas trifásicos:
Para el equipo trifásico la capacidad se da para las tres fases y el voltaje de línea a línea.
Para cálculos en sistemas trifásicos balanceados, el circuito se puede reducir a un
circuito monofásico y entonces el voltaje será de línea a tierra.
Las ecuaciones planteadas para sistemas monofásicos se pueden aplicar en circuitos
trifásicos conectados en delta, si el voltaje base es línea a línea y los kVA base 1/3 de
25
los kVA trifásicos. En sistemas de potencia trifásicos balanceados el voltaje de línea a
línea es √3 veces el voltaje al neutro y las corrientes de los devanados en delta son 1/√3
veces las corrientes de línea que salen de la delta.
En un circuito de línea a neutro , una impedancia al neutro Z que se dé en Ohms se
puede calcular en porcentaje o por unidad de la impedancia base al neutro, por
ecuaciones que tengan kVA base trifásicos y voltaje base de la línea.
donde
Z = impedancia al neutro
kVA base = kVA trifásicos
kV base = Voltaje base de línea a línea
CAPÍTULO III
COMPONENTES SIMÉTRICAS
27
3.1 Teoría de las componentes simétricas.
En 1918 C. L. Fortescue, presentó en una reunión del “American Institute of Electrical
Engineers”, un trabajo que constituye una de las herramientas más poderosas para el
estudio de los circuitos polifásicos desequilibrados. Los fallos asimétricos en sistemas
de transmisión, que pueden ser cortocircuitos, impedancia entre líneas, impedancia de
una o más líneas a tierra o conductores abiertos, se estudian por el método de las
componentes simétricas. La parte fundamental de la teoría es sencilla y como tal, debe
entenderse sin complicaciones.
La separación de un vector en componentes para simplificar procedimientos de cálculo
es de uso común, así un voltaje o corriente de alterna formado por dos componentes en
cuadratura se expresa como:
V = V1 + j V 2
El número de componentes pudiera ser mayor que dos.
Así:
E = I Z = ( I1 + I2 ) Z es válido si: I = I1 + I2
E = I Z = ( I1 + I2 + I3) Z se cumple si: I = I1 + I2 + I3
En las relaciones anotadas arriba se puede decir en primer lugar que I1 e I2 son
“componentes” de la corriente I, y también que I1 , I2 e I3 son “componentes” de I en
el segundo caso.
Con un criterio similar se establece que
V a = V a(1) + V a(2) + V a(0)
28
V b = V b(1) + V b(2) + V b(0)
V c = V c(1) + V c(2) + V c(0)
o sea, en un sistema trifásico desbalanceado el vector voltaje de cada fase será igual a la
suma de tres componentes llamados de secuencia positiva, negativa y cero.
Los componentes de secuencia positiva, acompañados con superíndice 1, son tres
vectores de igual magnitud y separación angular de 120° entre ellas con secuencia
normal ABC.
Los componentes de secuencia negativa, acompañados con superíndice 2, son tres
vectores de igual magnitud y separación angular de 120° con secuencia ACB.
Los componentes de secuencia cero, acompañados con superíndice 0, son tres vectores
de la misma magnitud y de la misma dirección.
Se puede considerar que las componentes simétricas de determinado sistema trifásico
desbalanceado son las que se anotan enseguida:
Figura 3.1 Conjuntos de vectores equilibrados que son los componentes
Simétricos de tres vectores desequilibrados.
29
El sistema trifásico balanceado es fácil de graficar, si aplicamos las relaciones:
V a = V a(1) + V a(2) + V a(0)
V b = V b(1) + V b(2) + V b(0)
V c = V c(1) + V c(2) + V c(0)
Los vectores resultantes se muestran en la siguiente figura:
Figura 3.2 Suma gráfica de los componentes representados en la figura 3.1
para obtener tres vectores desequilibrados.
El operador “a” es un vector de magnitud unitaria y dirección 120°, puesto en forma
cartesiana será:
a =
De la misma forma el operador a2 será un vector de magnitud unitaria y dirección 240°
ó -120° que puesto en forma cartesiana es:
30
a2 =
Finalmente el operador a3 será un vector de magnitud unitaria y ángulo cero grados.
Aplicando el operador “a” a un vector particular,
éste no cambiará su magnitud,
solamente su dirección que será “adelantada” de acuerdo con el ángulo asociado con el
operador “a”.
Figura 3.3 Diagrama vectorial de las potencias del operador “a”.
La propiedad de uso más general en el desarrollo de relaciones entre componentes
simétricas será la anotada enseguida:
a =
a2 =
_____________________
a + a2 = -1
Por lo tanto a2 + a + 1 = 0
31
3.2 Componentes simétricos de vectores asimétricos.
El operador “a” aplicado a las componentes simétricas del sistema trifásico
desbalanceado da las siguientes relaciones:
V b(1) = a2 V a(1)
V b(2) = a V a(2)
V b(0) = V a(0)
V c(1) = a V a(1)
V c(2) = a2 V a(2)
V c(0) = V a(0)
Por lo que las relaciones:
V a = V a(1) + V a(2) + V a(0)
V b = V b(1) + V b(2) + V b(0)
V c = V c(1) + V c(2) + V c(0)
se modifican y quedan:
V a = V a(0) + V a(1) + V a(2)
V b = V a(0) + a2 V a(1) + a V a(2)
V c = V a(0) + a V a(1) + a2 V a(2)
Va
=
Vb
Vc
1
1
1
V a (0)
1
a2
a
V a (1)
1
a
a2
V a (2)
Si denominamos:
A
=
1
1
1
1
a2
a
32
1
a2
a
La inversa de A será:
A -1
=
1
1
1
1
a
a2
1
a2
a
Puesto que se cumple A . A -1 = I
I
=
1
0
0
0
1
0
0
0
1
Y premultiplicando ambos miembros de ⏐ V fase ⏐ = ⏐A⏐ .⏐V s ⏐ por ⏐ A -1 ⏐
Se tiene:
V a (0)
V a (1)
V a (2)
= 1/3
1
1
1
Va
1
a
a2
Vb
1
a2
a
Vc
O bien:
3 V a (0) = V a + V b + V c
3 V a (1) = V a + a V b + a2 V c
3 V a (2) = V a + a2 V b + a V c
33
La primera ecuación de las últimas tres demuestra que no existe componente de
secuencia cero si la suma de los tres vectores desequilibrados es cero. Como la suma de
los vectores de tensión entre líneas en un sistema trifásico es siempre cero, los
componentes de secuencia cero no existen en las tensiones de línea, cualquiera que sea
el desequilibrio. La suma de los vectores de las tres tensiones entre línea y neutro no es
necesariamente cero y, por lo tanto, las tensiones, respecto al neutro, pueden tener
componentes de secuencia cero.
Estas ecuaciones pueden escribirse también para las corrientes de la misma manera que
para los voltajes y son las siguientes:
3 I a (0) = I a + I b + I c
3 I a (1) = I a + a I b + a2 I c
3 I a (2) = I a + a2 I b + a I c
En un sistema trifásico, la suma de las corrientes en las líneas, es igual a la corriente I n
en el retorno por el neutro. Por lo tanto,
Ia+Ib+Ic=In
3 I a (0) = I n
Si no hay retorno por el neutro de un sistema trifásico, In es cero y las corrientes en las
líneas no contienen componentes de secuencia cero. Una carga conectada en Delta no
tiene retorno por el neutro y por eso las corrientes que van a una carga conectada en
delta no tienen componentes de secuencia cero.
34
3.3 Impedancias de secuencia y redes de secuencia.
La caída de tensión que se origina en cualquier parte del circuito por la corriente de una
secuencia determinada, depende de la impedancia de la parte del circuito para la
corriente de dicha secuencia. La impedancia de un circuito cuando por él circulan
solamente corrientes de secuencia positiva se llama impedancia a la corriente de
secuencia positiva o bien impedancia de secuencia positiva. Similarmente, si sólo
existen corrientes de secuencia negativa, la impedancia se denomina impedancia de
secuencia negativa; y cuando existen únicamente corrientes de secuencia cero, la
impedancia se llama impedancia de secuencia cero.
El análisis de una falla asimétrica en un sistema simétrico consiste en la determinación
de los componentes simétricos de las corrientes desequilibradas que circulan. Como las
corrientes componentes de la secuencia de una fase dan lugar a caídas de tensión
solamente de la misma secuencia y son independientes de las corrientes de las otras
secuencias, en un sistema equilibrado, las corrientes de cualquier secuencia pueden
considerarse circulando en una red independiente formada solamente por las
impedancias a la corriente de tal secuencia. El circuito equivalente monofásico formado
por las impedancias a la corriente de cualquier secuencia exclusivamente, se denomina
red de secuencia para tal secuencia en particular. La red de secuencia incluye las f.e.m.
generadas de secuencia igual.
Las redes de secuencia que transportan las corrientes I a (1), I a (2) e I a (0) se interconectan
para representar diversas condiciones de fallas desequilibradas. Por lo tanto, para
35
calcular el efecto de un fallo por el método de los componentes simétricos, es esencial
determinar las impedancias de secuencia y combinarlas para formar redes de secuencia.
3.4 Redes de secuencia positiva y negativa.
Es sencillo trazar las redes de secuencia; para empezar las tensiones generadas son sólo
de secuencia positiva, ya que el generador está proyectado para suministrar tensiones
trifásicas. Por lo tanto la red de secuencia positiva de un generador está formada por una
f.e.m. en serie con la impedancia de secuencia positiva del generador. Las redes de
secuencia negativa no contienen f.e.m. pero incluyen las impedancias del generador a
secuencia negativa. La f.e.m. generada en la red de secuencia positiva, es la tensión en
las terminales sin carga, respecto al neutro, que es igual a las tensiones detrás de las
reactancias transitorias y subtransitorias y a la tensión detrás de la reactancia sincrónica
al considerar al generador sin carga. La reactancia del generador en la red de secuencia
positiva es la reactancia transitoria, subtransitoria o síncrona, dependiendo del tipo de
estudio que se esté realizando.
La barra de referencia para las redes de secuencia positiva y negativa es el neutro del
generador. Por lo que respecta a los componentes de secuencia positiva y negativa, el
neutro del generador está al potencial de tierra, ya que solamente circula corriente de
secuencia cero por la impedancia entre el neutro y tierra.
El paso de una red de secuencia positiva a negativa es sumamente sencillo. Las
36
impedancias de secuencia positiva y negativa son las mismas en un sistema simétrico
estático, la conversión de una red de secuencia positiva a negativa se lleva a cabo
cambiando, si es necesario, solamente las impedancias que representan máquinas
giratorias, y omitiendo las f.e.m. Dado que todos los puntos neutros de un sistema
trifásico simétrico están al mismo potencial cuando circulan corrientes trifásicas
equilibradas, todos los puntos neutros deben de estar al mismo potencial para las
corrientes de secuencia positiva o para las de secuencia negativa. Por lo tanto, el neutro
de un sistema trifásico balanceado es el potencial de referencia lógico para especificar
las caídas de tensión de secuencia positiva y negativa, y es la barra de referencia de
estas redes. La impedancia conectada entre el neutro de una máquina y tierra no es una
parte de la red de secuencia positiva ni de la red de secuencia negativa, porque ni la
corriente de secuencia positiva, ni la de secuencia negativa pueden circular por una
impedancia así conectada.
3.5 Redes de secuencia cero.
Un sistema trifásico funciona como monofásico en cuanto a corrientes de secuencia cero
se refiere, ya que las corrientes de secuencia cero tienen el mismo valor en magnitud y
dirección en cualquier punto en todas las fases del sistema. Por consiguiente, las
corrientes de secuencia cero circularán solamente si existe un camino de retorno por el
cual puede completarse el circuito. El punto de referencia para los voltajes de secuencia
cero es el potencial de tierra en el punto del sistema en el cual se especifica. Como las
corrientes de secuencia cero pueden estar pasando a tierra, dicha tierra no está
37
necesariamente al mismo potencial en todos sus puntos y la barra de referencia de la red
de secuencia cero no representa una tierra con potencial uniforme. La de tierra y los
cables de toma de tierra están incluidos en la impedancia de secuencia cero de la línea
de transporte, y el circuito de retorno de la red de secuencia cero es un conductor de
impedancia nula, que es la barra de referencia del sistema. La impedancia de tierra está
incluida en la impedancia de secuencia cero, por lo que las tensiones, medidas respecto
a la barra de referencia de la red de secuencia cero, dan la tensión correcta respecto de
tierra.
Si el circuito está conectado en estrella, sin conexión del neutro a tierra o a otro punto
neutro del circuito, la suma de las corrientes que van hacia el neutro en las tres fases es
igual a cero. Dado que las corrientes, cuya suma es nula, no tienen componentes de
secuencia cero, la impedancia a la corriente de secuencia cero es infinita más allá del
punto neutro, lo que se indica por un circuito abierto en la red de secuencia cero entre el
neutro de secuencia cero del circuito conectado en estrella y la barra de referencia,
como se representa en la figura 3.4a.
38
Figura 3.4 Redes de secuencia cero para cargas conectadas en Y.
Si el neutro del circuito conectado en Y se une a tierra a través de una impedancia nula,
se inserta una conexión de impedancia cero para unir el punto neutro y la barra de
referencia de la red de secuencia cero como se ve en la figura 3.4b.
Si la impedancia Zn se intercala entre el neutro y tierra de un circuito conectado en Y,
debe colocarse una impedancia 3Zn entre el neutro y la barra de referencia de la red de
secuencia cero, como se aprecia en la figura 3.4c. La caída de tensión de secuencia cero,
originada en la red de secuencia cero por el paso de Ia(0) por 3Zn, es la misma que en el
39
sistema real en el que pasa 3 I a (0), por Zn La impedancia formada por una resistencia o
una reactancia se conecta directamente entre el neutro de un generador y tierra para
limitar la corriente de secuencia cero durante un fallo. La impedancia de tal resistencia o
reactancia limitadora de corriente se representa en la red de secuencia cero de la manera
descrita.
Un circuito conectado en delta, por no disponer de camino de retorno, presenta una
impedancia infinita a las corrientes de línea de secuencia cero. La red de secuencia cero
está abierta en el circuito con conexión en triángulo. Las corrientes de secuencia cero
pueden circular dentro del circuito delta, puesto que éste es un circuito serie cerrado
para la circulación de corrientes monofásicas. Tales corrientes, sin embargo, tendrían
que ser producidas en el delta, por inducción de una fuente exterior o por las tensiones
generadas de secuencia cero.
En la figura 3.5 se representa un circuito delta y su red de secuencia cero. Aun cuando
se generan tensiones de secuencia cero en las fases del circuito delta, no existe tensión
de secuencia cero en las terminales, porque la elevación de tensión en cada fase del
generador es igual a la caída de tensión en la impedancia de secuencia cero de cada fase.
Figura 3.5 Carga conectada en delta y su red de secuencia cero
40
Merecen una atención especial los circuitos equivalentes de secuencia cero de los
transformadores trifásicos. Las diversas combinaciones posibles de los devanados
primario y secundario en estrella y delta varían la red de secuencia cero. La teoría de los
transformadores hace posible la construcción del circuito equivalente de la red de
secuencia cero. Se sabe que en el circuito primario no circula corriente, a menos que
circule una corriente en el secundario, si se desprecia la corriente magnetizante que es
relativamente pequeña; además la corriente primaria se determina por la corriente
secundaria y la relación de transformación de los arrollamientos, despreciando la
corriente magnetizante.
Las distintas conexiones se presentan en la figura 3.6, las flechas indican los caminos
posibles para la circulación de la corriente de secuencia cero. La no existencia de flecha
indica que la conexión del transformador es tal que no puede circular la corriente de
secuencia cero. Para cada conexión se presenta el circuito equivalente de secuencia
cero, con resistencia y un camino para la corriente magnetizante omitida. Las letras P y
Q identifican los puntos correspondientes en el diagrama de conexiones y el circuito
equivalente.
CASO 1. Conexión estrella - estrella. Un neutro a tierra.
Si uno de los dos neutros de un banco estrella - estrella no está puesto a tierra, la
corriente de secuencia cero no puede circular en ninguno de los dos arrollamientos. La
ausencia de camino por un arrollamiento impide la corriente en el otro. Para la corriente
de secuencia cero existe un circuito abierto entre las dos partes del sistema conectado
por el transformador.
41
CASO 2. Conexión estrella - estrella. Ambos neutros a tierra.
Cuando los dos neutros están puestos a tierra, existe un camino en los dos
arrollamientos para las corrientes de secuencia cero. Si la corriente de secuencia cero
puede seguir un circuito completo fuera del transformador y en ambos lados de él,
puede circular en ambos arrollamientos del transformador. En la red de secuencia cero,
los puntos de ambos lados del transformador se unen por la impedancia de secuencia
cero del transformador.
CASO 3. Conexión estrella - delta. Puesto a tierra neutro de Y.
Si el neutro de la Y se pone a tierra, las corrientes de secuencia cero tienen camino a
tierra a través de la conexión en estrella, ya que las corrientes inducidas
correspondientes pueden circular en la conexión delta. La corriente de secuencia cero
que circula en la delta para equilibrar la corriente de secuencia cero en la estrella, no
puede circular en las líneas conectadas al delta. El circuito equivalente proporciona un
camino desde la línea en el lado estrella, a través de la resistencia equivalente y
reactancia de pérdida del transformador, hasta la barra de referencia. Es preciso que
exista un circuito abierto entre la línea y la barra de referencia en el lado delta. Si la
conexión del neutro a tierra contiene una impedancia Zn, el circuito equivalente de
secuencia cero debe tener una impedancia 3Zn en serie con la resistencia equivalente y
la reactancia de pérdida del transformador para conectar la línea en el lado Y a tierra.
CASO 4. Conexión estrella - delta. Sin aterrizar neutro.
Si la Y no se aterriza, la impedancia Zn entre el neutro y la barra de referencia es
infinita. La impedancia 3Zn en el circuito equivalente del caso anterior para la
42
impedancia de secuencia cero, se hace infinita. La corriente de secuencia cero no puede
circular por los devanados del transformador.
CASO 5. Conexión delta - delta.
Un circuito delta - delta no proporciona camino de retorno a la corriente de secuencia
cero, por lo tanto no existe corriente de secuencia cero en el transformador, aunque
puede circular dentro de los arrollamientos delta.
Los circuitos equivalentes de secuencia cero, determinados para diversas partes del
sistema separadamente, se combinan fácilmente para formar la red completa de
secuencia cero.
Las figuras 3.7 y 3.8 representan diagramas unifilares de dos sistemas de energía
pequeños y sus correspondientes redes de secuencia cero, simplificadas, suprimiendo
las resistencias y admitancias en paralelo.
43
Figura 3.6 Circuitos equivalentes de secuencia cero de transformadores trifásicos
junto con los esquemas de conexiones y símbolos para diagramas unifilares.
44
Figura 3.7 Diagrama unifilar de un sistema de energía pequeño
y su red de secuencia cero equivalente.
Figura 3.8 Diagrama unifilar de un sistema de energía pequeño
Y su red de secuencia cero equivalente
CAPÍTULO IV
MATRIZ DE IMPEDANCIAS DE BARRAS
46
4.1 Introducción.
El análisis nodal ha tomado gran fuerza en los últimos años exponiéndose como la
técnica más utilizada para el estudio de los sistemas de potencia. Lo anterior debido a
las ventajas disponibles hoy en día para el manejo y el almacenamiento de las matrices
que representan las redes eléctricas. Un análisis nodal se basa en aplicar el balance de
corrientes en cada nodo del sistema, siendo las variables de interés los voltajes nodales
y las inyecciones de corriente.
Un problema en un sistema eléctrico de potencia puede simularse eficientemente
mediante cambios en las inyecciones nodales. Así, un cambio de carga o generación
equivale a modificar las inyecciones de corriente o potencia en el sistema. Otras
modificaciones en la red de transmisión exigen alterar y determinar las inyecciones en
diferentes puntos del sistema.
En especial para el estudio de fallas y flujos de potencia en un SEP, las técnicas
modernas utilizan el análisis de nodos como base para las formulaciones utilizadas.
47
4.2
Matriz nodal de admitancias.
El análisis de la distribución de corrientes en una red permite establecer ecuaciones que
definen el comportamiento del sistema. En el caso multinodo se genera la matriz de
admitancias para representar la red eléctrica.
La ecuación matricial utilizada para el análisis de nodos es la siguiente:
[Y].[V] = [I]
Donde:
I
Vector de inyecciones de corriente nodales
V
Vector de voltajes nodales
Y
Matriz nodal de admitancias
En la ecuación anterior el vector de corrientes (I) representa la excitación del sistema y
el vector de voltajes (V) es el vector de respuesta ante un estímulo. La matriz de
admitancias representa la topología de la red.
Para comprender mejor la ecuación se desarrolla en detalle la ecuación de corriente para
el nodo i, de la figura siguiente.
48
Figura 4.1 Determinación de la ecuación nodal para el nodo i.
La ecuación para el nodo i se obtiene del balance nodal de corrientes
I i = I i j + I i k + I i ref
A la vez, cada corriente en una rama del sistema se puede expresar en función de los
voltajes nodales (V i, V j , V k ) y de las admitancias de rama ( Y i j , Y i k , Y i ref ).
I ij= Y ij ( V i - V j )
I ik= Y ik( V i - V k )
I i ref = Y i ref ( V i - V ref )
Sustituyendo en la ecuación de corrientes, se obtiene:
I i = Y i j ( V i - V j )+ Y i k ( V i - V k )+ Y i ref ( V i - V ref )
Agrupando términos:
I i = (Y i j + Y i k + Y i ref ) V i - Y i j V j - Y i k V k - Y i ref V ref
De la ecuación anterior se obtienen las reglas para la formación de la matriz de
admitancias:
El elemento propio (diagonal) está compuesto por la suma de las admitancias de los
elementos conectados a un nodo. Para el nodo i, el elemento es Y i i = Y i j + Y i k + Yref.
Los elementos fuera de la diagonal se definen como el negativo de la admitancia entre
un nodo y sus nodos vecinos. Para la conexión entre los nodos i, j, el elemento es Y i j =
- Y ij .
49
De las reglas anteriores se observa que la matriz de admitancias
[Y] contiene
información de conectividad de la red eléctrica, es decir, el elemento ( i , j ) tendrá valor
si existe la rama ( i , j ).
El caso común en los sistemas de potencia es que cada nodo sólo está conectado a unos
cuantos nodos vecinos, por lo que la matriz de admitancias será dispersa ( contiene
muchos elementos nulos ). En sistemas reales, sólo alrededor del 5% de los elementos
de la matriz contienen información diferente de cero.
4.3
Matriz nodal de impedancias
La ecuación de admitancia puede representarse en forma alterna de la manera siguiente:
[V] = [Z].[I]
donde :
[ Z ] = [ Y ] -1 representando la matriz nodal de impedancias.
Es importante notar que las ecuaciones que relacionan el voltaje y la corriente por
medio de admitancia e impedancia son equivalentes en forma matemática, sólo que
desde el punto de vista computacional y conceptual hay diferencias importantes.
La ecuación de impedancia permite un cálculo directo de los voltajes nodales en función
de las inyecciones de corriente. En el caso lineal, los voltajes se expresan como una
combinación lineal de las corrientes nodales inyectadas. La matriz Z se puede
interpretar como una matriz de coeficientes de sensitividad.
Si el vector de corriente se divide en dos o más partes se puede expresar como:
50
[ I ] = [ I 1 ] + [ I 2 ] + ... + [ I n ]
Sustituyendo está expresión en la ecuación de impedancia, se obtiene:
[ V ] = [ Z ] .( [ I1 ] + [ I2 ] + ... + [ I n ])
Se puede apreciar en la ecuación anterior que los voltajes nodales se pueden evaluar
calculando la respuesta a cada estímulo de corriente y después superponer los efectos.
[ V ] = [ Z ] [ I 1 ] + [ Z ] [ I 2 ] + ... +[ Z ] [ I n ]
4.4
Significado de la matriz de impedancias.
A diferencia de la matriz de admitancias, que se forma por inspección, la matriz de
impedancias no se forma directamente y requiere de un proceso más elaborado.
Generalmente en la matriz Z todos los elementos tienen valor, lo cual hace que el
voltaje nodal en un punto del sistema dependa de todas las inyecciones nodales. Esto
indica que la matriz de impedancias contiene información relacionada con la
distribución de corrientes en toda la red.
Si se supone que sólo existe una inyección de corriente en el sistema (nodo j), los
voltajes nodales se calculan mediante:
V 1 = Z 1jI j
V 2 = Z 2jI j
V x = Z xjI j
V n = Z njI j
51
En la siguiente figura se ilustra el caso de tener una sola inyección de corriente en el
sistema.
Figura 4.2 Distribución de corrientes en un sistema con una sola inyección de corriente.
La corriente que entra en el nodo j se distribuye en la red eléctrica de acuerdo a las
impedancias de las ramas, y completa el circuito mediante las conexiones del sistema a
la referencia.
Las impedancias Z
xj
se pueden interpretar como el cociente del voltaje en el nodo x
debido a la inyección de corriente en el nodo j.
En el caso de tener una corriente unitaria las impedancias son numéricamente iguales a
los voltajes nodales.
Se puede concluir que la matriz Z contiene información de la distribución de corrientes
en el sistema. Así, si se desea obtener la circulación de corriente en la rama r - s, al
inyectar una corriente unitaria en el nodo k, se calcula de la siguiente forma:
52
4.5
Características de matrices.
El análisis nodal se puede realizar utilizando las matrices de admitancias o de
impedancias, cada una de las cuales tiene características propias. En la siguiente Tabla
se resume lo más importante de la comparación.
Tabla 4.1 Características de las Matrices Y y Z
Topología
Elementos
con
Información
Local
Relación
Directa
Matriz Circuito
Si
Sensitividad
Sistema
No
Matriz
Determinación
Tipo
Información
Y
Inspección
Dispersa
Llena
( fácil )
Z
Algoritmo
(complicado)
V-I
De esta tabla se observan características deseables de ambas matrices. De la matriz de
admitancias, su fácil obtención y dispersidad. Por otro lado, la matriz de impedancias
contiene información muy valiosa a nivel sistema.
En aplicaciones reales, la selección de matrices depende de aspectos computacionales y
de la eficiencia y tiempo de respuesta en el proceso de solución. En general, se desea
53
obtener las ventajas de ambas matrices, mediante el manejo de matrices dispersas y el
diseño de algoritmos eficientes.
4.6 Teorema de Thévenin y Zbus.
La matriz de impedancias de barra brinda información importante, relacionada con la
red de sistemas de potencia, que puede ser usada para obtener ventaja en los cálculos de
redes.
Para establecer una notación se designará a los voltajes de barra que corresponden a los
valores iniciales I0 de las corrientes de barra I mediante V0 = Zbus I0. Los voltajes V01
a V0N son los voltajes efectivos de circuito abierto que pueden medirse por un
voltímetro entre las barras de la red y el nodo de referencia. Cuando las corrientes de
barra cambian de sus valores iniciales a sus nuevos valores I0 = ΔI, los nuevos voltajes
de barra están dados por la siguiente ecuación de superposición:
V = Zbus ( I0 + ΔI ) = Zbus I0 + Zbus ΔI = V0 + ΔV
donde ΔV representa los cambios que hay en los valores originales de los voltajes de
barra.
En la figura 4.3a se muestra la forma esquemática de un sistema de gran escala con una
barra K representativa que se ha extraído del sistema junto con el nodo de referencia.
En principio se considera que el circuito no está energizado, de modo que las corrientes
de barra I0 y los voltajes V0 son cero. Entonces, una corriente de ΔIk amperes (o de ΔIk
54
por unidad cuando Zbus está en por unidad) se inyecta dentro del sistema por medio de
una fuente de corriente que se conecta al nodo de referencia.
Los cambios de voltaje resultantes en las barras de la red (indicadas por las cantidades
incrementales ΔV1 a ΔVN ) están dadas por
1
2
K
N
ΔV1
1
Z11
Z12
. . .
Z1K
. . .
Z1N
0
ΔV2
2
Z21
Z22
. . .
Z2K
. . .
Z2N
0
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
ΔVK
=
K ZK1
ZK2
. . . ZKK
. . . ZKN
ΔIK
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
ΔVN
N ZN1
ZN2
. . . ZNK
. . . ZNN
0
Siendo ΔIK en la fila K el único elemento diferente de cero en el vector de corriente.
Los voltajes de barra incrementales se obtienen a través de la multiplicación de filas por
columnas en la ecuación matricial anterior quedando
55
ΔV1
1
Z1K
ΔV2
2
Z2K
.
.
.
.
.
=
ΔVK
.
K
ZKK
.
.
.
.
.
.
ΔVN
N
ΔIK
ZNK
Que son numéricamente iguales a los elementos en la columna K de Zbus multiplicados
por la corriente ΔIk . El voltaje en la barra K se obtiene al sumar estos cambios de
voltaje a los voltajes originales de las barras en la forma
VK = V0K + ZKK ΔIK
El circuito que corresponde a esta ecuación se muestra en la figura 4.3b de donde se
aprecia que la impedancia de Thévenin Zth en la barra K del sistema está dada por
Zth = ZKK
donde ZKK es elemento diagonal en la fila K y en la columna K de Zbus.
56
Figura 4.3. a) Red original con la barra K y el nodo de referencia extraídos.
b) Circuito equivalente de Thévenin en el nodo K.
De la misma manera se puede determinar la impedancia de Thévenin entre dos barras J
y K de la red. La red que de otra forma sería pasiva se energiza por la inyecciones de
corriente ΔIJ en la barra J y ΔIK en la barra K, como se indica en la figura 4.4a. Si se
designa a los cambios en los voltajes de barra, que resultan de la combinación de estas
dos inyecciones de corriente como ΔV1 a ΔVN , se obtiene
57
1
1
ΔV1
Z11
.
.
.
.
ΔVJ
ΔVK
=
J
J
K
. . . Z1J
Z1K
. . . Z1N
0
. . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
ZJ1
K ZK1
. . .
N
. . . ZJJ
ZJK
. . . ZJN
ΔIJ
. . . ZKJ ZKK
. . . ZKN
ΔIK
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
ΔVN
N ZN1
. . . ZNJ ZNK
. . . ZNN
0
en donde los voltajes incrementales son iguales al producto de ΔIJ por la columna J
sumado al producto de ΔIK por la columna K del sistema de Zbus, como se indica
1
ΔV1
.
ΔVJ
ΔVK
.
Z1J ΔIJ + Z1K ΔIK
.
=
J
ZJJ ΔIJ + ZJK ΔIK
K ZKJ ΔIJ + ZKK ΔIK
.
58
ΔVN
N ZNJ ΔIJ + ZNK ΔIK
Al sumar estos cambios de voltaje a los voltajes de barra originales, se obtienen para las
barras J y K
VJ = V0J + ZJJ ΔIJ + ZJK ΔIK
VK = V0K + ZKJ ΔIJ + ZKK ΔIK
Al sumar y restar ZJK ΔIJ a la primera ecuación y de la misma forma, ZKJ ΔIK en la
segunda ecuación se obtiene
VJ = V0J + ( ZJJ - ZJK ) ΔIJ + ZJK ( ΔIJ + ΔIK )
VK = V0K + ZKJ ( ΔIJ + ΔIK ) + ( ZKK - ZKJ ) ΔIK
Los elementos ZJK y ZKJ son iguales porque Zbus es simétrica y el circuito que
corresponde a estas dos ecuaciones se muestra en la figura 4.4b, que representa el
circuito equivalente de Thévenin del sistema entre las barras J y K. La inspección de la
figura muestra que el voltaje de circuito abierto de la barra K a la barra J es V0K - V0J y
la impedancia que se encuentra por la corriente de cortocircuito Isc de la barra K a la J
en la figura 4.4c es la impedancia de Thévenin
Zth,JK = ZJJ + ZKK - 2ZJK
La figura 4.4b representa el efecto sobre el sistema original, en lo que se refiere a las
conexiones externas en las barras J y K. Se puede trazar la impedancia de Thévenin que
hay entre la barra J y el nodo de referencia, cuyo valor es ZJJ = ( ZJJ - ZJK ) + ZJK , así
59
como el voltaje en circuito abierto V0J; también de la barra K al nodo de referencia se
tiene la impedancia de Thévenin ZKK = ( ZKK - ZKJ ) + ZKJ y el voltaje de circuito
abierto V0K. Finalmente, cuando la impedancia de rama se conecta entre las barras J y K
de la figura 4.4d, la corriente resultante I b está dada por
Figura 4.4. a) Red original con fuentes de corriente ΔIJ en la barra J y ΔIK en la barra K;
b) circuito equivalente de Thévenin; c) conexión de corto circuito;
c) impedancia Z b entre las barras J y K.
60
4.7
Modificación de una Zbus existente.
Como la matriz Zbus es una herramienta importante en el análisis de sistemas de
potencia, se debe examinar como se puede modificar una matriz de impedancias de
barra existente para añadir nuevos buses o para conectar nuevas líneas a las barras
establecidas. Se podría crear una nueva Ybus e invertirla, pero existen métodos directos
para modificar Zbus que son mucho más simples que una inversión de matriz, aún para
un número pequeño de barras.
Se conocen varios tipos de modificaciones en los que una rama que tiene una
impedancia Zb se añade al sistema con una Zbus definida. La matriz de impedancias de
barra original es una matriz de N x N y se identifica como Zorig.
En la notación para usarse en el análisis, las barras existentes se designan con números o
con las letras H, I, J y K. Las letras P o Q, designan la nueva barra que se añade a la red.
El voltaje original de las barras se designa V0K y el nuevo voltaje después de modificar
la matriz Zbus es VK .
CASO 1. Añadir la impedancia Zb de una barra nueva P al nodo de referencia.
La adición de una nueva barra P que se conecta al nodo de referencia a través de Z b sin
que haya conexión con cualquiera de las otras barras de la red original no altera los
voltajes originales de barra cuando una corriente I
P
voltaje VP en la nueva barra es igual a IP Z b. Entonces,
se inyecta a la nueva barra. El
61
V0 1
0
I1
V0 2
0
I2
.
.
.
.
.
.
.
.
V0 N
0
IN
Zb
IP
.
VP
=
Zorig.
0
0
. . .
0
Se observa que el vector columna de corrientes multiplicado por la nueva Zbus no altera
los voltajes de la red original y da como resultado el voltaje correcto en la nueva barra
P.
CASO 2. Añadir la impedancia Z b de una nueva barra P a una barra existente K.
La adición de una nueva barra P conectada a través de Z b de a una barra existente K,
con una corriente inyectada IP a la barra P, ocasionará que la corriente que entra a la red
original por la barra K se convierta en la suma de la IK, que se inyecta a la barra K, más
la corriente IP que llega a través de Z b, como se indica en la figura 4.5.
Figura 4.5. Adición de una barra nueva P que se conecta a través de
una impedancia Z b a una barra K existente.
62
La corriente IP que fluye dentro de la red en la barra K incrementa el voltaje original
V0K en una cantidad dada por el voltaje ZKK I P, esto es,
VK = V0K + ZKK I P
y VP es mayor que la nueva VK por una cantidad dada mediante el voltaje Z b I P. Así,
VP = V0K + ZKK I P + Z b I P
y al sustituir el valor de V0K se obtiene
VP = ZK1 I1 + ZK2 I2 + . . . + ZKN IN + IP ( ZKK + Z b )
La nueva fila que hay que añadir a la matriz Zorig. con el fin de encontrar el valor de VP
es
ZK1 ZK2 . . . ZKN
( ZKK + Z b )
Como Zbus debe ser una matriz cuadrada alrededor de la diagonal principal, se debe
sumar una nueva columna que es la transpuesta de la nueva fila. En la nueva columna se
tiene en cuenta el incremento, debido a I P, de todos los voltajes de barra. La ecuación
matricial es
V0 1
ZK1
I1
V0 2
ZK1
I2
.
.
.
.
.
.
.
.
V0 N
ZK1
IN
ZKK + Zb
IP
.
VP
=
Zorig.
ZK1
ZK1
. . .
ZK1
63
Se observa que los primeros N elementos de la nueva fila son los elementos de la Késima fila de Zorig y que los primeros N elementos de la nueva columna son los
elementos de la K-ésima columna de Zorig.
CASO 3. Añadir la impedancia Z b desde una barra existente K al nodo de referencia.
Se añade una nueva barra ficticia P conectada, a través de Z b, a la barra K. Entonces, se
cortocircuita la barra P al nodo de referencia haciendo que VP sea igual a cero para
obtener la misma ecuación matricial del caso anterior, con la excepción de que VP es
cero. Así, con el propósito de realizar la modificación, se crean una nueva fila y
columna, al igual que el caso anterior, pero se deben eliminar la fila y la columna ( N +
1 ) con ayuda de la reducción de Kron. Esto es posible por el cero en la matriz columna
de voltajes. Se debe encontrar cada elemento Zhi (nuevo) en la nueva matriz, donde
CASO 4. Añadir la impedancia Z b entre dos barras existentes J y K.
Se examina la figura 4.6 que muestra las barras que se han extraído de la red original. El
cambio en el voltaje en cada barra H, causado por la inyección de Ib en la barra J y - I b
en la barra K, está dado por
ΔVH = ( ZHJ - ZHK ) Ib
lo que significa que el vector de los cambios de voltaje de barra ΔV se encuentra al
restar la columna K de la columna J de Zorig. y multiplicar el resultado por I b. Los
voltajes de barra se obtienen
V1 = V01 + ΔV1
64
y usando la ecuación anterior se obtiene
V1 = Z11 I1 + . . . + Z1J IJ + Z1K IK + . . . + Z1N IN + I b ( Z1J - Z1K )
De manera similar en las barras J y K.
VJ = ZJ1 I1 + . . . + ZJJ IJ + ZJK IK + . . . + ZJN IN + I b ( ZJJ - ZJK )
VK = ZK1 I1 + . . . + ZKJ IJ + ZKK IK + . . . + ZKN IN + I b ( ZKJ - ZKK )
Se necesita una ecuación extra porque se desconoce el valor de Ib. Esta ecuación es la
siguiente que se define con el equivalente de Thévenin en la sección anterior, que puede
arreglarse de la forma
0 = V0J - V0K + I b ( Zth,JK + Z b )
V0J es igual al producto de la fila J de la matriz Zorig y la matriz columna de corrientes,
así como V0K es igual a la fila K de la matriz Zorig multiplicada por I. Al sustituir las
expresiones para V0J y V0K en la ecuación anterior se obtiene
65
I1
.
.
.
0
=
( fila J - fila K ) de Zorig
IJ
+
( Zth,JK + Z b )Ib
IK
.
.
.
IN
Se puede escribir la siguiente ecuación matricial
V1
I1
.
.
.
.
.
.
VJ
VK
=
Zorig.
.
(col. J - col. K)
IJ
de Zorig..
IK
.
.
.
.
.
.
VN
IN
0
. (col. J - col. K) de Zorig.
Zbb
Ib
66
en la que el coeficiente de Ib en la última fila se denota por
Z b b = ZTH,JK + Z b = ZJJ + ZKK - 2ZJK + Z b
La nueva columna es la columna J menos la columna K de la matriz Zorig. con Z bb en la
fila (N+1). La nueva fila es la transpuesta de la nueva columna. Se eliminan la fila y la
columna (N+1) de la matriz cuadrada de la ecuación anterior, de la forma que se hizo
previamente, y se observa que cada elemento ZHI en la nueva matriz es
No se necesita el caso de introducir dos barras nuevas conectadas a través de la
impedancia Zb porque siempre se puede conectar una de estas barras nuevas, a través de
una impedancia, a una barra existente o bien, la de referencia antes de añadir la segunda
barra nueva.
Figura 4.6 Adición de una impedancia Z b entre
Las barras existentes J y K.
Quitando una rama. Una sola rama de impedancia Z
b
colocada entre dos nodos se
puede quitar de la red al añadir el negativo de Z b entre los mismos nodos terminales. La
razón es que la combinación paralelo de la rama existente ( Z b ) y la rama que se añade
( - Z b ) dan como resultado un circuito abierto efectivo.
67
La tabla 4.2 resume los procedimientos de los casos del 1 al 4.
Tabla 4.2 Modificación de la Zbarra existente
Caso
Adición de la rama Z b desde
Z barra (nueva)
El nodo de referencia a la nueva barra P
1
La barra existente K a la nueva barra P
2
La barra existente K al nodo de
referencia
3
Se repite el Caso 2
Se quita la fila P y la columna
P
por reducción de Kron
( El nodo P es temporal )
La barra existente J a la barra
existente K
Formar la matriz
4
donde Z th,JK = Z JJ + Z KK - 2 Z JK
( El nodo Q es temporal )
Quitar la fila Q y la columna Q
por reducción de Kron.
68
4.8
Determinación directa de Zbus.
La formulación de Zbus usando un algoritmo directo para su construcción es un proceso
rápido en la computadora. En la salida se tiene una lista de las impedancias de rama que
muestra las barras a las que están conectadas. Se empieza por escribir la ecuación para
una barra que se conecta a través de una impedancia Za a la de referencia, como
V1
=
Za
I1
y ésta se puede considerar como una ecuación que incluye tres matrices, cada una de las
cuales tiene una fila y una columna. Ahora se puede añadir una nueva barra conectada a
la primera o al nodo de referencia. Por ejemplo, si la segunda barra se conecta al nodo
de referencia a través de Z b, se tiene la ecuación matricial
V1
Za
0
I1
0
Za
I2
=
V2
y se procede a modificar la matriz Zbus desarrollada añadiendo otras barras y ramas
según los procedimientos descritos en la sección anterior. La combinación de estos
procedimientos constituye el algoritmo de construcción de Zbus. Por lo general, las
barras de una red deben ser renumeradas internamente por el algoritmo de la
computadora para que concuerden con el orden en el que se añaden a la Zbus conforme
ésta se va construyendo.
CAPÍTULO V
CÁLCULO DE FALLAS UTILIZANDO ZBUS
70
5.1 Introducción
En forma general se puede definir una falla como cualquier conexión anormal que cambie
las condiciones de funcionamiento normales de un sistema. Esta situación puede deberse a
una carga desbalanceada u otra condición asimétrica.
Es conveniente distinguir entre dos tipos de falla:
a) Una falla serie es un desbalance en las impedancias en las líneas y no involucra el neutro
o la tierra y tampoco involucra ninguna interconexión entre fases.
b) Una falla shunt es un desbalance entre fases o entre fases y neutro. Las fallas shunt son
conocidas comúnmente como cortocircuitos.
Los tipos de fallas shunt de mayor interés general son las siguientes:
1. Falla trifásica balanceada
2. Falla de línea a tierra.
3. Falla de línea a línea.
4. Falla de dos líneas a tierra.
La falla de línea a tierra es usualmente la más común, llegando a constituir quizá el 70% de
todas las fallas en líneas de transmisión.
71
La falla trifásica balanceada aún cuando es la más rara en ocurrencia (aproximadamente el
5% del total de fallas en sistemas eléctricos de potencia) es importante por diversas razones
entre las que se encuentran las siguientes:
a) Es frecuentemente el tipo de falla más severa y en consecuencia debe ser tomada en
cuenta para verificar que los interruptores tengan los valores nominales de capacidad
interruptiva adecuados.
b) Es la falla más simple de analizar y en consecuencia es la única calculada en algunos
casos en que se carece de información compuesta del sistema.
La falla de línea a tierra es más severa que la falla trifásica balanceada en las siguientes
situaciones:
a) Los generadores tienen neutros sólidamente aterrizados o tienen bajas impedancias en el
neutro.
b) En el lado estrella aterrizado de un banco de transformadores estrella aterrizada - delta.
72
5.2 Fallas simétricas (falla trifásica).
Una falla trifásica es la de menor probabilidad de ocurrencia; pero su estudio es importante,
ya que es la que somete al equipo al mayor esfuerzo, y representa además una falla
simétrica, lo cual da mayor simplicidad a su análisis.
Figura 5.1 Falla trifásica en un sistema de potencia.
La red que se muestra a continuación puede ser considerada como un equivalente
monofásico de un sistema trifásico balanceado. Si se selecciona la barra 2 para hacer el
estudio de cortocircuito, se designa Vf como el voltaje real en la barra 2 antes de que la
falla ocurra.
73
Figura 5.2 Diagrama de reactancias del equivalente monofásico de
una red trifásica balanceada.
Una falla trifásica en la barra 2 se simula con la red de la figura 5.3, donde las fuentes de
voltaje V f y - V f conectadas en serie constituyen una rama en cortocircuito. La fuente de
voltaje V f que actúa sola en esta rama es igual al voltaje prefalla en la barra 2 y, por lo
tanto, no originaría un flujo de corriente en la rama. Con V f y - V f en serie, la rama se
convierte en un cortocircuito y, como se muestra, la corriente de la rama es I f. Por lo tanto,
es evidente que I f se origina cuando se añade la fuente - V f. La corriente I f se distribuye a
través del sistema, desde el nodo de referencia, antes de fluir hacia afuera de la barra 2 por
medio de la fuente - V f. Al hacer esto, produce cambios en los voltajes de barra que
ocurren en el sistema debido a la falla. Si Ea, Eb y Vf se cortocircuitan, entonces - V f actúa
sola y la corriente - I f hacia la barra 2 es la única corriente que entra a la red desde fuentes
externas. Con - V
f
como la única fuente, la red tiene las ecuaciones de impedancias de
nodo en la forma de la matriz Zbus, con lo que
74
Δ V1
Δ V1
Δ V2 = - V f
=
Z11
Z12
Z13
Z14
0
Z21
Z22
Z23
Z24
-If
Δ V3
Δ V3
Z31
Z32
Z33
Z34
0
Δ V4
Δ V4
Z41
Z42
Z43
Z44
0
El prefijo Δ se seleccionó para indicar los cambios en los voltajes en las barras debidos a
la corriente - If que se inyecta dentro de la barra 2 por la falla.
Figura 5.3 Circuito que muestra una falla trifásica en la barra 2 simulada
por V f y - V f en serie.
El cambio en los voltajes de barra debido a –If está dado por
75
Δ V1
Δ V2
Δ V1
=
-Vf
- Z12 I f
=
-If
Columna 2
=
- Z22 I f
Δ V3
Δ V3
De
- Z32 I f
Δ V4
Δ V4
Zbus
- Z42 I f
La segunda fila de esta ecuación muestra que
If =
Z22 es el elemento en la diagonal de Zbus que representa la impedancia de Thévenin de la
red en la barra 2. Al sustituir la expresión para If en la ecuación matricial anterior, se
obtiene
Δ V1
Δ V2
- (Z12/ Z22) V f
=
-Vf
Δ V3
- (Z32/ Z22) V f
Δ V4
- (Z42/ Z22) V f
Cuando el voltaje del generador, - V f, se cortocircuita en la red de la figura 5.3 y las
fuentes E a, E
b
y V f se vuelven a insertar en la red, las corrientes y voltajes en cualquier
parte de la red serán iguales a las que había antes de la falla. Por el principio de
76
superposición, estos voltajes prefalla se suman a los cambios dados por la ecuación anterior
para obtener los voltajes totales que hay después de que la falla ocurre.
Por lo general la red que falla se supone sin carga antes de ocurrir la falla. En ausencia de
cargas no fluyen corrientes prefalla y no hay diferencias de voltaje a través de las
impedancias de las ramas, entonces, todos los voltajes de la red son iguales a V f, esto es, al
voltaje en el punto de falla antes de ocurrir la falla. La suposición de que no se presenta
corriente prefalla simplifica el trabajo de manera considerable, y si se aplica el principio de
superposición, se obtienen los voltajes de barra en la forma
V1
V2
Δ V1
Vf
=
Vf
+
Δ V2
1 - (Z12/ Z22)
V f - Z12 I f
=
V f– V f
=Vf
0
V3
Vf
Δ V3
V f - Z12 I f
1 - (Z32/ Z22)
V4
Vf
Δ V4
V f - Z12 I f
1 - (Z42/ Z22)
Así, los voltajes en todas las barras de la red se pueden calcular por medio del voltaje
prefalla V f de la barra que falla y los elementos en la columna de Zbus que corresponden a
la misma barra. Los valores calculados de los voltajes de barra conducirán al cálculo de las
corrientes en las ramas de la red, dependiendo de los valores de reactancia con que se ha
formado Zbus.
77
En términos generales, cuando una falla trifásica ocurre sobre una barra K de una red de
gran escala, se tiene
If =
y si se desprecian las corrientes de carga prefalla, se puede entonces escribir para el voltaje
en cualquier barra J durante la falla
V J = V f - ZJK I f = V f - V f
donde ZJK y ZKK son elementos en la columna K de Zbus del sistema. Entonces, si el voltaje
prefalla V
f
de la barra J no es igual al voltaje prefalla de la barra K, simplemente se
reemplaza V f del lado izquierdo de la ecuación por el voltaje prefalla real de la barra J.
Al conocer los voltajes de barra durante la falla se pueden calcular las corrientes IIJ de la
barra I a la barra J en la línea de impedancia Z b que conecta las dos barras,
IIJ =
=
=
Esta ecuación muestra a IIJ como la fracción de la corriente de falla If que aparece como un
flujo de la línea desde la barra I a la barra J en la red que ha fallado. Si la barra J está
directamente conectada a la barra K que falla a través de una línea de impedancia serie Z b,
entonces la contribución de la corriente desde la barra J a la corriente en la barra K que ha
fallado es simplemente VJ / Z b .
78
5.3 Fallas asimétricas
La mayoría de las fallas que ocurren en los sistemas de potencia, son fallas asimétricas que
consisten en cortocircuitos asimétricos. Las fallas asimétricas que pueden ocurrir son: fallas
monofásicas a tierra o a línea a tierra, fallas línea a línea y fallas línea a línea y a tierra. El
método de las componentes simétricas es útil en un análisis para determinar las corrientes y
voltajes en todas las partes del sistema después de que ha ocurrido la falla, por que
cualquier falla asimétrica da origen a que fluyan corrientes desbalanceadas en el sistema. Se
considerarán las fallas en sistemas de potencia, mediante la aplicación del teorema de
Thévenin que permite encontrar la corriente en la falla al reemplazar el sistema por un
generador y una impedancia en serie. También se mostrará como se aplica la matriz de
impedancias de barra al análisis de las fallas asimétricas.
En el desarrollo de las ecuaciones para las componentes simétricas de corrientes y voltajes
de una red general, se designarán las corrientes que fluyen de las fases a, b y c, hacia afuera
del sistema original balanceado como I afa, I bf, I cf, respectivamente.
Se designarán como VJ a , VJ b y VJ c los voltajes línea a tierra durante la falla en cualquier
barra J del sistema ; y se continuará usando los superíndices 1, 2 y 0 para denotar las
cantidades de secuencia positiva, negativa y cero, respectivamente. El voltaje de línea a
neutro de la fase a en el punto de falla antes de que ocurra la falla, se designará como Vf,
que es un voltaje de secuencia positiva porque el sistema está balanceado.
79
En la figura 5.4 se muestra un diagrama unifilar de un sistema de potencia, así como sus
redes de secuencia. El punto donde se supone la falla es el punto P y, en este ejemplo en
particular, se le llama barra K en el diagrama unifilar y en las redes de secuencia.
En la sección anterior se utilizó la matriz de impedancias de barra, compuesta por las
impedancias de secuencia positiva, para determinar las corrientes y voltajes al ocurrir una
falla trifásica simétrica. El método se puede extender fácilmente al caso de las fallas
asimétricas, entendiendo que las redes de secuencia negativa y cero también se pueden
representar por matrices de impedancia de barra. La matriz de impedancias de barra para la
red de secuencia positiva se escribirá ahora en la siguiente forma :
ZBUS(1) =
Z11(1)
Z12(1)
...
Z1K(1)
...
Z1N(1)
Z21(1)
Z22(1)
...
Z2K(1)
...
Z2N(1)
.
...
.
.
.
.
.
.
.
.
ZK1(1) ZK2(1)
. . . ZKK(1) . . . ZKN(1)
.
.
.
.
.
.
.
.
.
.
.
.
ZN1(1) ZN2(1)
. . . ZNK(1) . . . ZNN(1)
De manera similar, las matrices de impedancias de barra para las redes de secuencia
negativa y cero se escribirán :
80
ZBUS(2) =
Z11(2)
Z12(2)
...
Z1K(2)
...
Z1N(2)
Z21(2)
Z22(2)
...
Z2K(2)
...
Z2N(2)
.
...
.
.
.
.
.
.
.
.
ZK1(2) ZK2(2)
ZBUS(0) =
. . . ZKK(2) . . . ZKN(2)
.
.
.
.
.
.
.
.
.
.
.
.
ZN1(2) ZN2(2)
. . . ZNK(2) . . . ZNN(2)
Z21(0)
Z22(0)
...
.
...
Z2K(0)
...
Z2N(0)
.
.
.
.
.
.
.
.
ZK1(0) ZK2(0)
. . . ZKK(0) . . . ZKN(0)
.
.
.
.
.
.
.
.
.
.
.
.
ZN1(0) ZN2(0)
. . . ZNK(0) . . . ZNN(0)
81
Así, ZIJ(1), ZIJ(2)y ZIJ(0), son elementos representativos de las matrices de impedancias de
barra para las redes de secuencia positiva, negativa y cero, respectivamente. Si así se desea,
cada una de las redes se puede reemplazar por su equivalente de Thévenin entre cualquiera
de las barras y el nodo de referencia.
82
Figura 5.4 Diagrama unifilar de un sistema trifásico, tres redes de secuencia
del sistema y el equivalente de Thévenin de cada red para la falla en P, que
se denomina barra K.
En la figura 5.4, se muestra el circuito equivalente de Thévenin entre el punto de falla P y el
nodo de referencia, en cada red de secuencia, junto al diagrama de la red que le
83
corresponde. La fuente de voltaje en la red de secuencia positiva y de su circuito
equivalente de Thévenin tienen el valor Vf que es el voltaje prefalla al neutro en el punto de
falla P. La impedancia de Thévenin que se mide entre el punto P y el nodo de referencia de
la red de secuencia positiva es ZKK(1), cuyo valor depende de las reactancias usadas en la
red.
No hay corrientes de secuencia negativa y cero que fluyan antes de que ocurra la falla y los
voltajes prefalla son cero en todas las barras de secuencia negativa y cero. Las impedancias
de secuencia negativa y cero entre el punto P y el nodo de referencia en las redes
respectivas se representan por las impedancias ZKK(2) y ZKK(0), respectivamente.
Como I
f a
simétricas I
es la corriente que fluye desde el sistema hacia la falla, sus componentes
fa
(1)
,I
fa
(2)
,I
fa
(0)
, fluyen hacia afuera de sus respectivas redes de secuencia ,
como se muestra en la figura 5.4.
Así, las corrientes - I f a(1), - I f a(2), - I f a(0), representan corrientes que se inyectan, debido a
la falla en la barra K, en las redes de secuencia positiva, negativa y cero. Estas inyecciones
son la causa de que cambien los voltajes en las redes de secuencia positiva, negativa y cero
y se pueden calcular a partir de las matrices de impedancias de barra. Por ejemplo, los
cambios de voltaje, debidos a la inyección de la corriente - I f a(1) en la barra K, en la red de
secuencia positiva del sistema de N barras, están dados, en términos generales, por :
84
Δ V1a(1)
Z11(1) Z12(1) . . . Z1K(1)
...
Z1N(1)
0
- Z1K(1) I f a(1)
Δ V2a(1)
Z21(1) Z22(1) . . . Z2K(1)
...
Z2N(1)
0
- Z2K(1) I f a(1)
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
ZKN(1)
- Ifa(1)
- ZKK(1) I f a(1)
.
Δ VKa(1)
=
...
ZK1(1) ZK2(1) . . . ZKK(1)
...
=
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
ZNN(1)
0
- ZNK(1) I f a(1)
Δ VNa(1)
ZN1(1) ZN2(1) . . . ZNK(1)
...
En situaciones prácticas, es costumbre considerar como cero las corrientes prefalla y
designar el voltaje Vf como el voltaje de secuencia positiva en todas las barras del sistema
antes que la falla ocurra. Al sumar los cambios de voltaje de la ecuación anterior con los
voltajes prefalla, se obtienen los voltajes totales de secuencia positiva de la fase a en cada
barra durante la falla,
85
V1a(1)
Vf
Δ V1a(1)
V f - Z1K(1) I f a(1)
V2a(1)
Vf
Δ V2a(1)
V f - Z2K(1) I f a(1)
.
.
.
.
.
.
.
.
.
=
.
+
.
=
.
VKa(1)
Vf
Δ VKa(1)
V f - ZKK(1) I f a(1)
.
.
.
.
.
.
.
.
.
.
.
.
VNa(1)
Vf
Δ VNa(1)
V f - ZNK(1) I f a(1)
Las ecuaciones para los cambios de voltaje de secuencias negativa y cero debidos a la falla
en la barra K de un sistema de N barras se escriben de manera similar que la ecuación
anterior, cambiando superíndices y considerando los voltajes prefalla iguales a cero para la
secuencia negativa y cero, y así se obtiene
V1a(2)
- Z1K(2) I f a(2)
V2a(2)
- Z2K(2) I f a(2)
.
=
.
VKa(2)
- ZKK(2) I f a(2)
.
.
VNa(2)
- ZNK(2) I f a(2)
86
V1a(0)
- Z1K(0) I f a(0)
V2a(0)
- Z2K(0) I f a(0)
.
.
.
=
.
VKa(0)
- ZKK(0) I f a(0)
.
.
.
.
VNa(0)
- ZNK(0) I f a(0)
Así, al conocer las componentes simétricas I f a(0), I f a(1) , I f a(2), de las corrientes de falla en
la barra K, se pueden determinar los voltajes de secuencia de cualquier barra J del sistema a
partir de las filas J-ésimas de las ecuaciones anteriores. Esto es, durante la falla en la barra
K, los voltajes en cualquier barra J son
VJa(0) = - ZJK(0) I f a(0)
VJa(1) = Vf - ZJK(1) I f a(1)
VJa(2) = - ZJK(2) I f a(2)
87
Similarmente, para la barra K se tiene
Vka(0) = - ZkK(0) I f a(0)
Vka(1) = Vf – ZkK(1) I f a(2)
ecs (5.1)
Vka(2) = - ZkK(2) I f a(2)
y éstas son las ecuaciones para el voltaje en terminales a usarse en los equivalentes de
Thévenin de las redes de secuencia mostradas en la figura 5.4.
Las fallas que se analizarán pueden involucrar la impedancia Z f entre líneas y desde una a
dos líneas a tierra. Cuando Z f = 0, se tiene un cortocircuito directo, que se denomina falla
de punto. Aunque tales circuitos directos dan como resultado el valor más alto de corriente
de falla, y por lo tanto, son los valores más conservadores por ser utilizados cuando se
determinan por anticipado los efectos de la falla, la impedancia de falla tiene rara vez el
valor de cero.
Para fallas trifásicas, la corriente de falla se calcula :
Siendo K la barra fallada.
I f a (1) =
88
5.3.1 Falla de fase a tierra.
Este tipo de falla, es la que tiene una mayor probabilidad de ocurrencia en los sistemas
eléctricos de potencia; y por lo mismo, de las que constituyen un elemento de estudio
cotidiano, ya sea para planeación y proyectos o para ajuste de relevadores de protección.
Es una falla asimétrica e intervienen las impedancias de secuencia negativa y cero además
de la impedancia de secuencia positiva.
barra K
Figura 5.5 Falla de fase a tierra en un sistema de potencia
De la figura siguiente se obtienen tres ecuaciones de variables físicas para la falla.
I bf = I cf = 0
Va f = Zf Iaf
Aplicando las componentes simétricas para los voltajes y las corrientes se tienen las
ecuaciones :
89
I a f (0) =
( I af + 0 + 0 )
I a f (1) =
( I a f + a2 (0) + a (0) )
I a f (2) =
( I a f + a (0) + a2 (0) )
De estas ecuaciones se tiene que :
I a f (0) = I a f (1) = I a f (2) = I a f /3
Al sustituir I a f
(0)
por I a f
(1)
e Iaf
(2)
, se llega a que I a f = 3 I a f
(0)
. y de las
ecuaciones 5.1 se tiene
Vka(0) = - ZkK(0) I a f(0)
Vka(1) = Vf – ZkK(1) I a f (0)
Vka(2) = - ZkK(2) I a f (0)
Se suman estas ecuaciones y se obtiene:
Vka = Vka(0) + Vka(1) + Vka(2) = Vf - ( Zkk(0) + Zkk(1) + Zkk(2) ) I a f (0) = 3 Zf I a f (0)
90
Al encontrar la solución para I a f(0) se tiene:
I a f(0) = I a f(1) = I a f(2) = Vf / (Zkk(1) + Zkk(2) + Zkk(0) + 3Zf )
( Ec. De corriente de falla
para este caso particular de falla)
Iaf(1)
Zkk(1)
Vka(1)
Vf
Iaf(1) = Iaf(2) = Iaf(0)
Zkk(2)
Iaf(2)
Zkk(0)
Iaf(0)
Vka(2)
Vka(0)
Fig 5.6 Conexión de los equivalentes de Thévenin de las redes de secuencia para simular
una falla monofásica a tierra de la fase a en la barra K.
91
5.3.2 Falla de Fase a Fase.
Falla de fase a fase en un sistema de potencia.
Esta falla no es muy frecuente, sin embargo es una de las más severas que pueden acontecer
en un sistema de potencia.
Figura 5.7 Falla de fase a fase en un sistema de potencia en la barra K.
Las tres ecuaciones en esta condición de falla son :
I af = 0
I bf = - I cf
V kb – V kc = I bf Zf
Aplicando teoría de componentes simétricas se tiene :
I af(0) = 0
I af(1) = - I af(2)
Para satisfacer los requisitos de que I
af
(1)
= - I
af
(2)
se conectaran los equivalentes de
Thévenin de las redes de secuencia positiva y negativa en paralelo como se muestra en la
figura 5.8.
92
I
af
(1)
I af(2)
K
+
Vf
Zf
K
Zkk(1)
Zkk(2)
V ka(1)
Vka(2)
referencia
-
Fig. 5.8 Conexión de los equivalentes de Thévenin de las redes de secuencia positiva y
negativa para una falla línea a línea entre las fases b y c en la barra K del sistema.
La ecuación para la corriente de secuencia positiva en la falla se puede determinar
directamente de la figura 5.8, así que
I af(1) = - I af(2 = Vf / ( Zkk(1) + Zkk(2) + Zf )
93
5.3.3 Falla de doble línea a tierra
Falla de dos fases a tierra en un sistema de potencia.
K
Figura 5.9 Falla de dos fases a tierra en un sistema de potencia. El punto de falla se
denomina barra K.
Las tres ecuaciones de falla son :
Iaf = 0
V kb = V kc = (Ibf + Icf ) Zf ec(2)
Como Iaf es cero, la corriente de secuencia cero esta dada por Iaf
(0)
= ( Ibf + Icf )/ 3 y los
voltajes de la ecuación (2) dan
V kb = V kc = 3ZfIaf
(0)
ec(3)
Al sustituir Vkb en lugar de Vkc en la transformación de las componentes simétricas, se
encuentra que
Vka(0)
Vka(1)
Vka(2)
= 1/3
1
1
1
Vka
1
a
a2
Vkb
1
aa
a
Vkb
94
La segunda y tercera fila de esta ecuación muestran que
Vka(1) = Vka(2)
ec(4)
Mientras la primera fila y la ecuación (3) muestran que
3Vka(0) = Vka + 2Vkb = ( Vka(0) + Vka(1) + Vka(2) ) + 2 ( 3Zf I af (0) )
Se factorizan los términos de secuencia cero en un lado de la ecuación, haciendo
Vka(2) = Vka(1) se obtiene
Vka(1) = Vka(0) - 3Zf I af (0)
ec(5)
Al colocar juntas las ecuaciones (4) y (5) y al observar nuevamente que Iaf = 0 se llega a los
siguientes resultados
Vka(1) = Vka(2) = Vka(0) - 3Zf I af (0
Iaf(0) + Iaf(1) + Iaf(0) = 0
Las ecuaciones características de la falla bifásica a tierra se satisfacen cuando las tres redes
de secuencia se conectan en paralelo como se muestra en la figura 5.10
Iaf(2)
Iaf(1)
Iaf(0)
K
+
Zkk(1)
Vka(1)
K
Zkk(2)
Vka(2)
Vf
K
Zkk(0)
Vka(0)
3Zf
Fig. 5.10 Conexión de los equivalentes de Thévenin de las redes de secuencia para una
falla bifásica a tierra de las fases b y c en la barra K.
95
A partir de este diagrama se tiene
Vf
I af(1) =
Zkk(2) ( Zkk(0) + 3Zf )
Zkk(1) +
Zkk(2) + Zkk(0) + 3Zf
Zkk(0) + 3Zf
Iaf(2) = - Iaf(1)
Zkk(2) + Zkk(0) + 3Zf
Zkk(2)
Iaf(2) = - Iaf(1)
Zkk(2) + Zkk(0) + 3Zf
CAPÍTULO VI
DESCRIPCION DEL PROGRAMA PARA EL
CÁLCULO DE LA CORRIENTE DE
CORTOCIRCUITO
97
6.1 Descripción general del programa
Para llevar a cabo un programa, se requiere de un orden lógico de ciertas instrucciones.
A continuación, se describen de manera general los pasos a seguir para la formación de
un programa del cálculo de la corriente de cortocircuito.
Lectura de los datos
del sistema eléctrico
de potencia
1
Obtención del número de
nodos y ordenación de
los datos.
2
Formación de las
matrices de impedancia
de barra
3
Selección del tipo de
falla del sistema
4
Cálculo de la corriente
de cortocircuito y los
voltajes nodales
5
Despliegue de la
corriente y los voltajes
6
Figura 6.1. Diagrama a bloques de los pasos a seguir del programa de cortocircuito
98
Para poder hacer un programa computacional en cualquier lenguaje, es necesario tener
en claro un orden que llevar para la obtención del mismo y de ahí en adelante lo que
restaría sería la aplicación de instrucciones, según el lenguaje a usar.
A continuación se explicará el diagrama a bloques , de una manera general y también
será referido cómo es que se usó en MATLAB, para llevar a cabo el cálculo.
1. - El primer paso de todo programa es la lectura de los datos, que son los que vamos a
manipular para la obtención de nuestro objetivo. Para este programa los datos se pueden
introducir uno por uno e irlos guardando para su posterior aplicación, aquí se deben de
introducir los elementos del sistema, que tipo de elemento son (generador,
transformador, línea de transmisión, motor), los nodos entre los que se encuentran
conectados, las conexiones, las impedancias de secuencia positiva, negativa y cero.
En el programa presentado al final del proyecto, los datos del sistema se introducen en
un archivo llamado datosred, y dentro de este se encuentra una matriz llamada datos
que contiene los datos del sistema.
2. - Una vez que tenemos los datos, es necesario identificar el numero de nodos de
nuestro sistema, así como también es necesario ordenar los datos, antes de empezar a
formar las matrices de impedancia de barra, en sus diferentes secuencias.
3. – Lo que se busca aquí es la formación de las matrices de impedancia. Aquí es muy
importante saber como modificar una Zbarra existente, esto viene resumido en la tabla
99
4.2, en nuestro programa la formación de Zbarra se formó añadiendo elemento por
elemento.
Aquí hay algo muy interesante, por que para la formación de la matriz de secuencia cero
hay que tomar en cuenta las conexiones de los elementos (máquinas y transformadores),
si están o no conectados a tierra, ya que el código se complica cuando se presenta un
circuito abierto.
En el programa anexo a este proyecto, las funciones formaZ12 y formaZ0 son las que
se encargan de formar las matrices de impedancia de barra de secuencia positiva,
negativa y cero..
4. – Aquí se debe tener un menú, para la selección del tipo de falla a calcular, Este paso
es de los más sencillos, ya que el código que se necesita es muy corto. Al ejecutarse
nuestro programa, este mismo pide los datos como lo son tipo de falla, barra fallada y el
valor de la impedancia de falla.
5. – En este punto se calculan las corrientes de falla, en base a fórmulas del capítulo 5
de cálculo de fallas y al mismo tiempo se hace el cálculo de los voltajes en todas las
barras, haciendo uso de las componentes simétricas.
6. – Por último es necesario desplegar los resultados que se obtienen del programa,
mostrando las corrientes de cortocircuito y los voltajes de las barras de nuestro sistema.
100
SIMULACIÓN DE UNA FALLA DE LÍNEA A TIERRA EN UN SEP
Ahora se tiene un sistema eléctrico de potencia pequeño en el cual se simulará una falla
de fase a tierra en nuestro programa.
Dos máquinas sincrónicas se conectan a través de transformadores trifásicos a la línea
de transmisión que se muestra en la figura 6.2. Los valores nominales y las reactancias
de las máquinas y de los transformadores son:
G1 Y M1
100 MVA, 20 KV X´´d = X1 = X2 = 20% X0 = 4% Xn = 5%
Transformadores T1 y T2 100 MVA, 20 Y / 345 KV ; X = 8%
Ambos transformadores están sólidamente aterrizados en los dos lados. Sobre la base de
100MVA y 345 KV en el circuito de la línea de transmisión, las reactancias son X1 = X2
= 15% y X0 = 50%. El sistema está operando a voltaje nominal sin corrientes prefalla
cuando una falla de punto(Zf=0) monofásica a tierra, ocurre en la fase A en la barra 3.
Determinar la corriente subtransitoria en la falla y los voltajes de línea a tierra en todos
los nodos.
101
G1
1
2
3
4
M1
falla
L1
T2
T1
Figura 6.2 Sistema eléctrico de potencia pequeño, con falla de línea a tierra en la
barra 3.
Los datos se introducen de esta manera en el archivo datosred que se encuentra dentro
de la carpeta de trabajo de MATLAB.
# n1 n2
sec(+)
sec(0)
tipo
conexn1
conexn2
ZN
datos = [ 1
0
1
j*0.2
j*0.04
-1
-1.2
0
j*0.05,
2
1
2
j*0.08
j*0.08
-2
-2.1
-2.1
0
,
3
2
3
j*0.15
j*0.5
-3
0
0
0
,
4
3
4
j*0.08
j*0.08
-2
-2.1
-2.1
0
,
5
4
0
j*0.2
j*0.04
-4
-4.2
0
j*0.05 ];
Enseguida se teclea la palabra calcula en el espacio de trabajo del programa y entonces
se empezara a simular la falla.
Luego nos pide los siguientes datos de entrada:
102
>> calcula
¿que falla quieres simular?==> tecleamos el 1(1 es para falla línea a tierra)
dame la barra fallada==>3
¿cual es el valor de la impedancia de falla(Zf)?==>0
El programa nos arroja los siguientes resultados:
Ifalla =
0 - 5.5653i
Va =
0.6159
0.4603
0.0000
0.2896
Vb =
-0.4452 - 0.8660i
-0.4252 - 0.8660i
-0.5562 - 0.8660i
103
-0.5362 - 0.8660i
Vc =
-0.4452 + 0.8660i
-0.4252 + 0.8660i
-0.5563 + 0.8660i
-0.5363 + 0.8660i
INTERPRETACIÓN DE LOS RESULTADOS
Como puede verse, la corriente de falla en la fase A y barra 3, es - 5.5653i, que es un
valor en p.u,, ya que todos los datos introducidos en nuestro programa están en p.u. Para
obtener el valor de la corriente de falla en amperes solo basta con multiplicar el valor en
por unidad por el valor base de corriente.
Como era de esperarse, el voltaje de la fase A en la barra 3 es cero, ya que no puede
haber diferencia de potencial en un mismo punto, además de que la impedancia de falla
fue de cero.
104
CONCLUSIONES
Al haber concluido el trabajo, podemos decir que se han logrado los objetivos del
mismo, ya que se presenta la teoría para comprender el estudio de cortocircuito, así
como también se muestra el algoritmo del programa para el análisis de cortocircuito.
No hubo limitaciones para llevar a cabo el proyecto, ya que hay bastante información
bibliográfica, así como también hay disposición de lenguajes para programar, que cada
vez son más amigables.
En lo que se refiere al programa, esta hecho para fines académicos, para que los
alumnos en la materia lo aprovechen y lo mejoren, ya que se hicieron muchas omisiones
en el cálculo, como no tomar en cuenta la resistencia y la capacitancia de las lineas de
transmisión, desfasamientos de transformadores.
Todavía hace falta mejorar el programa, haciéndolo mas amigable en cuanto a la forma
en como introducir los datos del sistema y en la forma de mostrar las opciones de falla,
así como también los resultados, se invita a mejorar este programa..
105
BIBLIOGRAFÍA
HAYT William: ANÁLISIS DE CIRCUITOS EN INGENIERÍA;
Editorial Mc Graw Hill, México, 1995: tercera edición; 710 páginas.
STEVENSON William : ANÁLISIS DE SISTEMAS ELÉCTRICOS DE
POTENCIA. Editorial Mc Graw Hill, México, 1998: segunda edición; 390
páginas.
GUERRERO Rafael: CÁLCULO DE FALLAS EN SISTEMAS DE
POTENCIA, Editorial del sector eléctrico C.F.E., México, 1978; 223
páginas
MANUAL DE MATLAB. Universidad de Navarra. Javier García, José
Rodríguez, Alfonso Brazález.
105
APÉNDICE A
Código del programa
Estructura del archivo de datos (datosred)
%
#
n1
n2 sec(+)
sec(0) tipo conexn1 conexn2
datos = [ 1
0
1
j*0.2
j*0.04 -1
-1.2
0
j*0.05 ,
2
1
2
j*0.08 j*0.08 -2
-2.3
-2.1
0
,
3
2
3
j*0.15 j*0.5
0
0
0
,
4
3
4
j*0.08 j*0.08 -2
-2.2
-2.3
0
,
5
4
0
j*0.2
-4.2
0
j*0.05] ;
% columna 6(tipo de elemento)
-3
j*0.04 -4
ZN
conexión del generador
-1 = generador.
-1.1 = delta.
-2 = transformador.
-1.2 = estrella aterrizada.
-3 = línea de transmisión.
- 1.3 = estrella no aterrizada.
-4 = motor
conexión del transformador
conexión del motor
-2.1 = estrella aterrizada
-4.1 = delta.
-2.2 = estrella no aterrizada
-4.2 = estrella aterrizada.
-2.3 = delta
-4.3 = estrella no aterrizada.
Formación de las matrices de impedancia de barra Z1 y Z2
datosred;
% obtención del numero de nodos
m=max(datos(:,2));
n=max(datos(:,3));
if (m>n)
nn=m;
else
nn=n;
end
Zbus=zeros(nn+1,nn+1);
[nf nc]=size(datos);
datosord=zeros(nf,nc);
[datosord] = ordena(datos,nf);
%comienzo de la formación de Zbus.
exist=0;
nuevo=0;
p=0;
q=0;
r=0;
s=0;
opc=0;
for t=1 :nf,
p=0;
q=0;
r=0;
s=0;
opc=4;
%para caso de impedancia conectada a referencia.
if((datosord(t,3)==0))
nodo = datosord(t,2);
[ exist,p,q ] = fun1( datosord,exist,p,q,
if(t==1)
[ Zbus ] = NRNN( Zbus,datosord,nodo,t,opc );
else
[ exist,p,q ] = fun1( datosord,exist,p,q,t );
if(p==0 & q==0)
[ Zbus ] = NRNN( Zbus,datosord,nodo,t,opc );
end
if(p==1 | q==1)
n1=0;
n2=0;
for w=1 : t-1,
if(datosord(w,2)>n1)
n1=datosord(w,2);
end
if(datosord(w,3)>n2)
n2=datosord(w,3);
end
end
if(n1>n2)
n=n1;
else
n=n2;
end
%llamar a función funcNRNE.
[ Zbus ] = NRNE( Zbus,datosord,exist,n,nn,t,opc );
end
end
end
if(datosord(t,2)==0)
nodo=datosord(t,3);
if(t==1);
[ Zbus ] = NRNN( Zbus,datosord,nodo,t,opc );
else
[ exist,r,s ] = fun2( datosord,exist,r,s,t );
if(r==0 & s==0)
[ Zbus ] = NRNN( Zbus,datosord,nodo,t,opc );
end
if(r==1 | s==1)
n1=0;
n2=0;
for z=1 : t-1,
if(datosord(z,2)>n1)
n1=datosord(z,2);
end
if(datosord(z,3)>n2)
n2=datosord(z,3);
end
if(n1>n2)
n=n1;
else
n=n2;
end
%llamar a función funcNRNE.
[ Zbus ] = NRNE( Zbus,datosord,exist,n,nn,t,opc );
end
end
end
if((datosord(t,2)>0) & (datosord(t,3)>0))
%llamar a función1.
[ exist,p,q ] = fun1( datosord,exist,p,q,t );
%llamar a función2.
[ exist,r,s ] = fun2( datosord,exist,r,s,t );
if(((p==1) | (q==1)) & ((r==1) | (s==1)))
e1=datosord(t,3);
e2=datosord(t,2);
n1=0;
n2=0;
for g=1 : t-1,
if(datosord(g,2)>n1)
n1=datosord(g,2);
end
if(datosord(g,3)>n2)
n2=datosord(g,3);
end
end
if(n1>n2)
n=n1;
else
n=n2;
end
[ Zbus ] = NENE( Zbus,e1,e2,datosord,n,t,nn,opc );
end
if(((p==0) & (q==0)) & ((r==1) | (s==1)))
nuevo= datosord(t,2);
exist= datosord(t,3);
[ Zbus ] = NENN (Zbus,nuevo,exist,datosord,t,opc);
end
if(((p==1) | (q==1)) & ((r==0) & (s==0)))
nuevo= datosord(t,3);
exist= datosord(t,2);
[ Zbus ] = NENN( Zbus,nuevo,exist,datosord,t,opc );
end
end
end
Z1=zeros(nn,nn);
for d=1 : nn,
for c=1: nn,
Z1(d,c)=Zbus(d,c);
Z2(d,c)=Zbus(d,c);
end
end
Formación de la matriz de impedancia de barra Z0.
% función para la formación de la red de secuencia cero.
datosred;
% obtención del número de nodos
m=max(datos(:,2));
n=max(datos(:,3));
if (m>n)
nn=m;
else
nn=n;
end
Zbus=zeros(nn+1,nn+1);
[nf nc]=size(datos);
datosord=zeros(nf,nc);
[datosord] = ordena0(datos,nf);
for z=1 :nf,
p=0;
q=0;
r=0;
s=0;
exist=0;
nuevo=0;
nodo=0;
opc=8;
%(-1 se refiere a cuando es generador).
if( datosord(z,6)==(-1))
if(datosord(z,7)==(-1.2))
nodo = datosord(z,2);
[ exist,p,q ] = fun1( datosord,exist,p,q,z );
n1=0;
n2=0;
for w=1 : z-1,
if(datosord(w,2)>n1)
n1=datosord(w,2);
end
if(datosord(w,3)>n2)
n2=datosord(w,3);
end
end
if(n1>n2)
n=n1;
else
n=n2;
end
if(z==1)
[ Zbus ] = NRNN( Zbus,datosord,nodo,z,opc );
else
[te,quiero,conex,conex2,mucho] = checatr(datosord,z);
if((quiero==1) & (conex==-2.1))
[ Zbus ] = NRNE( Zbus,datosord,exist,n,nn,z,opc );
end
if((quiero==1) & (conex ~=-2.1))
[ Zbus ] = NRNN( Zbus,datosord,nodo,z,opc );
end
if((quiero==2) & (conex==-2.1))
[ Zbus ] = NRNE( Zbus,datosord,exist,n,nn,z,opc );
end
if((quiero==1) & (conex ~=-2.1))
[ Zbus ] = NRNN( Zbus,datosord,nodo,z,opc );
end
end
end
end
%(-2 se refiere cuando es transformador).
if( datosord(z,6)==(-2))
if(datosord(z,8)==(-2.1))
tierra =1;
else
tierra = 2;
end
if((datosord(z,7)==(-2.1)) & (datosord(z,8)==(-2.1)))
[ exist,p,q ] = fun1( datosord,exist,p,q,z );
[ exist,r,s ] = fun2( datosord,exist,r,s,z );
if(((p==1) | (q==1)) & ((r==1) | (s==1)))
e1=datosord(z,2);
e2=datosord(z,3);
n1=0;
n2=0;
for g=1 : z-1,
if(datosord(g,2)>n1)
n1=datosord(g,2);
end
if(datosord(g,3)>n2)
n2=datosord(g,3);
end
end
if(n1>n2)
n=n1;
else
n=n2;
end
[ Zbus ] = NENE( Zbus,e1,e2,datosord,n,z,nn,opc );
end
if(((p==0) & (q==0)) & ((r==1) | (s==1)))
nuevo= datosord(z,2);
exist= datosord(z,3);
[ Zbus ] = NENN (Zbus,nuevo,exist,datosord,z,opc);
end
if(((p==1) | (q==1)) & ((r==0) & (s==0)))
nuevo= datosord(z,3);
exist= datosord(z,2);
[ Zbus ] = NENN( Zbus,nuevo,exist,datosord,z,opc );
end
end
if((datosord(z,7)==(-2.1)) & (datosord(z,8)==(-2.3)))
exist=0;
[ exist,p,q ] = fun1( datosord,exist,p,q,z );
if(p==1 | q==1)
[ Zbus ] = NRNE( Zbus,datosord,exist,n,nn,z,opc );
end
if(p==0 & q==0)
nodo=datosord(z,2);
[ Zbus ] = NRNN( Zbus,datosord,nodo,z,opc );
end
end
if((datosord(z,7)==(-2.3)) & (datosord(z,8)==(-2.1)))
[ exist,r,s ] = fun2( datosord,exist,r,s,z );
if(r==1 | s==1)
[ Zbus ] = NRNE( Zbus,datosord,exist,n,nn,z,opc );
end
if(r==0 & s==0)
nodo = datosord(z,3);
[ Zbus ] = NRNN( Zbus,datosord,nodo,z,opc );
end
end
end
%(-3 se refiere a una linea de transmisión).
if(datosord(z,6)==(-3))
datosord(z,10) = datosord(z,5);
[te,quiero,conex,conex2,mucho] = checatr(datosord,z);
% principia código para cuando se mete una línea entre una barra nueva y una
existente.
%con conexión Y aterrizada, en el lado del TR.
if((quiero==1) & (mucho==0))
if(conex==(-2.1))
nuevo=datosord(z,3);
exist=datosord(z,2);
[ Zbus ] = NENN (Zbus,nuevo,exist,datosord,z,opc);
end
end
if((quiero==2) & (mucho==0))
if(conex==(-2.1))
nuevo=datosord(z,3);
exist=datosord(z,2);
[ Zbus ] = NENN (Zbus,nuevo,exist,datosord,z,opc);
end
end
if((quiero==0) & (mucho==1))
if(conex2==(-2.1))
nuevo=datosord(z,2);
exist=datosord(z,3);
[ Zbus ] = NENN (Zbus,nuevo,exist,datosord,z,opc);
end
end
if((quiero==0) & (mucho==2))
if(conex2==(-2.1))
nuevo=datosord(z,2);
exist=datosord(z,3);
[ Zbus ] = NENN (Zbus,nuevo,exist,datosord,z,opc);
end
end
% termina código para cuando se mete una línea entre una barra nueva y una
existente.
%principia código para cuando el devanado del lado de la línea no esta aterrizado.
if(quiero==1 & mucho==0)
if(conex ~= (-2.1))
[z,Zbus] = flota ( datosord,z,Zbus)
end
end
if(quiero==2 & mucho==0)
if(conex ~= (-2.1))
[z,Zbus] = flota ( datosord,z,Zbus)
end
end
if(quiero==0 & mucho==1)
if(conex2 ~= (-2.1))
[z,Zbus] = flota ( datosord,z,Zbus)
end
end
if(quiero==0 & mucho==2)
if(conex2 ~= (-2.1))
[z,Zbus] = flota ( datosord,z,Zbus)
end
end
end
%(-4 se refiere a cuando el elemento es un motor).
if(datosord(z,6)==-4)
if(datosord(z,7)==(-4.2))
;
nodo = datosord(z,2);
[ exist,p,q ] = fun1( datosord,exist,p,q,z );
n1=0;
n2=0;
for w=1 : z-1,
if(datosord(w,2)>n1)
n1=datosord(w,2);
end
if(datosord(w,3)>n2)
n2=datosord(w,3);
end
end
if(n1>n2)
n=n1;
else
n=n2;
end
if(z==1)
[ Zbus ] = NRNN( Zbus,datosord,nodo,z,opc );
else
[te,quiero,conex,conex2,mucho] = checatr(datosord,z);
if(te==1)
[ Zbus ] = NRNE( Zbus,datosord,exist,n,nn,z,opc );
else
if((quiero==1) & (conex==-2.1))
[ Zbus ] = NRNE( Zbus,datosord,exist,n,nn,z,opc );
end
if((quiero==1) & (conex ~=-2.1))
[ Zbus ] = NRNN( Zbus,datosord,nodo,z,opc );
end
if((quiero==2) & (conex==-2.1))
[ Zbus ] = NRNE( Zbus,datosord,exist,n,nn,z,opc );
end
if((quiero==1) & (conex ~=-2.1))
[ Zbus ] = NRNN( Zbus,datosord,nodo,z,opc );
end
end
if(p==0 & q==0)
[ Zbus ] = NRNN( Zbus,datosord,nodo,z,opc );
end
end
end
end
end
Zbuscero=zeros(nn,nn);
for d=1 : nn,
for c=1: nn,
Z0(d,c)=Zbus(d,c);
end
end
Selección del tipo de falla.
for h=1 :nn,
Vprefalla(h,1) = 1;
end
opc = input('¿que falla quieres simular?==>')
if(opc==1)
[Ifalla] = faset ( Z1,Z2,Z0,Vprefalla,nn);
end
if(opc==2)
[Ifalla] = fasefase (Z1,Z2,Z0,Vprefalla,nn);
end
if(opc==3)
[Ifalla] = fasefaset (Z1,Z2,Z0,Vprefalla,nn);
end
Falla trifásica.
function [Ifalla,Venfalla] = ftrif
formaZ12;
for h=1 :nn,
Vprefalla(h,1) = 1;
end
bf = input('dame la barra fallada==>');
Zf = input('cual es el valor de la impedancia de falla(Zf)==>');
Ifalla = Vprefalla(bf,1)/Z1(bf,bf);
for x=1 : nn,
incV(x,1) = -((Z1(x,bf)/Z1(bf,bf)) * (Vprefalla(bf,1)));
end
for c=1 : nn,
Venfalla(c,1) = Vprefalla(c,1) + incV(c,1) ;
end
Falla línea a tierra.
%funcion para calcular fallas asimétricas de línea a tierra.
function [Ifalla,Va,Vb,Vc] = faset
formaZ12;
formaZ0;
for h=1 :nn,
Vprefalla(h,1) = 1;
end
bf = input('dame la barra fallada==>');
Zf = input('cual es el valor de la impedancia de falla(Zf)==>');
If0a = (Vprefalla(bf,1)) / (Z1(bf,bf) + Z2(bf,bf) + Z0(bf,bf) + 3*Zf) ;
If1a = If0a;
If2a = If0a;
Ifalla = 3*If0a
a = -0.5+i*0.866;
for zu=1 : nn,
V0a(zu,1) = -Z0(zu,bf)*If0a;
V0b(zu,1) = V0a(zu,1);
V0c(zu,1) = V0a(zu,1);
V1a(zu,1) = Vprefalla(bf,1) - Z1(zu,bf)*If1a;
V1b(zu,1) = a*a*V1a(zu,1);
V1c(zu,1) = a*V1a(zu,1);
V2a(zu,1) = -Z2(zu,bf)*If2a;
V2b(zu,1) = a*V2a(zu,1);
V2c(zu,1) = a*a*V2a(zu,1);
end
for mel=1 : nn,
Va(mel,1) = V0a(mel,1) + V1a(mel,1) + V2a(mel,1);
Vb(mel,1) = V0b(mel,1) + V1b(mel,1) + V2b(mel,1);
Vc(mel,1) = V0c(mel,1) + V1c(mel,1) + V2c(mel,1);
end
Falla entre dos líneas.
%función para calcular fallas entre dos lineas.
function [Ifa,Ifb,Ifc,Va,Vb,Vc] = fasefase
formaZ12;
FormaZ0;
for h=1 :nn,
Vprefalla(h,1) = 1;
end
bf = input('dame la barra fallada==>')
Zf = input('cual es el valor de la impedancia de falla(Zf)==>')
If0a=0;
If1a = Vprefalla(bf,1) / (Z1(bf,bf) + Z2(bf,bf) + Zf );
If2a = -If1a;
a = -0.5+i*0.866;
Ifa = If0a +If1a +If2a;
Ifb = a*a*If1a +a*If2a;
Ifc = -Ifb;
Ifalla=Ifb
a = -0.5+i*0.866;
for zu=1 : nn,
V0a(zu,1) = -Z0(zu,bf)*If0a;
V0b(zu,1) = V0a(zu,1);
V0c(zu,1) = V0a(zu,1);
V1a(zu,1) = Vprefalla(bf,1) - Z1(zu,bf)*If1a;
V1b(zu,1) = a*a*V1a(zu,1);
V1c(zu,1) = a*V1a(zu,1);
V2a(zu,1) = -Z2(zu,bf)*If2a;
V2b(zu,1) = a*V2a(zu,1);
V2c(zu,1) = a*a*V2a(zu,1);
end
for mel=1 : nn,
Va(mel,1) = V0a(mel,1) + V1a(mel,1) + V2a(mel,1);
Vb(mel,1) = V0b(mel,1) + V1b(mel,1) + V2b(mel,1);
Vc(mel,1) = V0c(mel,1) + V1c(mel,1) + V2c(mel,1);
End
Falla de dos fases a tierra
% función para calcular fallas entre dos lineas a tierra.
function [Ifalla] = fasefaset (Z1,Z2,Z0,Vprefalla,nn)
bf = input('dame la barra fallada==>')
Zf = input('cual es el valor de la impedancia de falla(Zf)==>')
If1a = Vprefalla(bf,1) / [Z1(bf,bf) + [ (Z2(bf,bf)*(Z0(bf,bf) + 3*Zf)) / (Z2(bf,bf) +
Z0(bf,bf) + 3*Zf)]];
If2a = -If1a * [ (Z0(bf,bf) + 3*Zf) / ( Z2(bf,bf) + Z0(bf,bf) + 3*Zf) ];
If0a = -If1a * [ (Z2(bf,bf)) / ( Z2(bf,bf) + Z0(bf,bf) + 3*Zf) ];
a = -0.5+i*0.866;
IFA = If0a +If1a +If2a;
IFB = If0a + a*a*If1a +a*If2a;
IFC = If0a + a*If1a +a*a*If2a;
Ifalla = IFB +IFC
a = -0.5+i*0.866;
for zu=1 : nn,
V0a(zu,1) = -Z0(zu,bf)*If0a;
V0b(zu,1) = V0a(zu,1);
V0c(zu,1) = V0a(zu,1);
V1a(zu,1) = Vprefalla(bf,1) - Z1(zu,bf)*If1a;
V1b(zu,1) = a*a*V1a(zu,1);
V1c(zu,1) = a*V1a(zu,1);
V2a(zu,1) = -Z2(zu,bf)*If2a;
V2b(zu,1) = a*V2a(zu,1);
V2c(zu,1) = a*a*V2a(zu,1);
end
for mel=1 : nn,
Va(mel,1) = V0a(mel,1) + V1a(mel,1) + V2a(mel,1);
Vb(mel,1) = V0b(mel,1) + V1b(mel,1) + V2b(mel,1);
Vc(mel,1) = V0c(mel,1) + V1c(mel,1) + V2c(mel,1);
end