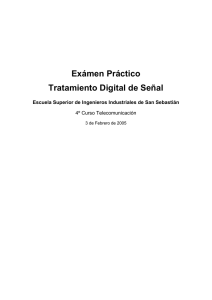
capitulo 2 selectores de frecuencias
Anuncio

UNIVERSIDAD VERACRUZANA FACULTAD DE INGENIERIA EN ELECTRONICA Y COMUNICACIONES “Diseño y Simulación de un Selector de Frecuencias con Filtros Activos” Tesis presentada para obtener el titulo de Ingeniero en Electrónica y Comunicaciones Presenta: Justina Cortés Ramírez Director de tesis: M. en C. Roman Garcia Ramos Asesor de tesis: M. en I. Luís David Ramírez González Poza Rica de Hgo., Ver., Junio 2007 INDICE CAPÍTULO 1 INTRODUCCIÓN 1.1 Antecedentes 1 1.2 Justificación 2 1.3 Alcances y limitaciones 3 CAPITULO 2 SELECTORES DE FRECUENCIAS 2.1 Introducción 4 2.2 Filtros ideales 5 2.2.1 Pasa bajas 5 2.2.2 Pasa altas 6 2.2.3 Pasa banda 6 2.2.4 Rechazabanda 7 2.3 Aproximaciones 8 2.4 Filtros Pasivos 9 2.5 La función de Transferencia 17 2.6 El amplificador operacional 19 2.6.1 Amplificador inversor 19 2.6.2 Amplificador no inversor 21 2.6.3 Amplificador sumador 22 2.6.4 Diferenciador 24 2.6.5 Integrador 25 2.7 Filtros Activos 27 2.7.1 Filtro pasa baja de primer orden 28 2.7.2 Filtro pasa alta de primer orden 30 2.7.3 Filtro pasa banda de segundo orden 32 i CAPÍTULO 3 DISEÑO DEL FILTRO ACTIVO 3.1 Introducción 34 3.2 Funciones de transferencia de segundo orden 35 9o 3.2.1 Función pasa baja 36 3.2.2 Función Pasa banda 37 3.3 Análisis del filtro activo 38 3.3.1 Función de transferencia pasabanda 39 3.3.2 Función de transferencia pasabalas 47 3.4 Técnica de diseño 53 3.4.1 Diseño del filtro activo pasabanda 53 3.4.2 Diseño del filtro activo pasabaja 54 3.5 Sensibilidad del filtro Activo 55 3.5.1 Análisis de Sensibilidad del filtro Activo 56 CAPÍTULO 4 SIMULACION Y RESULTADOS 4.1 Introducción 58 4.2 Pasabanda 58 4.3 Pasabaja 63 CONCLUSIONES 67 APENDICE-A 69 APENDICE-B 75 BIBLIOGRAFÍA 97 ii Capítulo 1 Introducción CAPÍTULO 1 INTRODUCCIÓN 1.1 Antecedentes El concepto de filtro eléctrico fue introducido en 1915 simultáneamente en Estados Unidos por Campbell y en Alemania por Wagner. En ese tiempo los filtros eran realizados usando elementos pasivos como inductores, resistores y capacitores. A los filtros realizados con elementos pasivos se les conoce como filtros pasivos. En la década de los 30s se desarrolló la teoría matemática para el diseño de filtros conocida como síntesis de inserción de pérdida. Esta teoría también apareció simultáneamente en Alemania, publicada por W. Cauer, y en Estados Unidos publicada por S. Darlington. Esta teoría también era para diseñar filtros pasivos y requiere de una gran cantidad de cálculos matemáticos. En esa época no había computadoras digitales y es hasta la década de los 50s cuando esta técnica tiene un gran uso. Hoy en día existen programas para PC que realizan estos cálculos con una velocidad sorprendente. Una de las más grandes ventajas de los filtros pasivos es su baja sensitividad. Esto quiere decir que si el valor de un elemento que compone al circuito se desvía ligeramente de su valor nominal, entonces las características del filtro cambian en un menor porcentaje con respecto al cambio del elemento. Una de las desventajas más grandes que tienen los filtros pasivos es el empleo de inductores los cuales son costosos, voluminosos y pesados. Estos hechos llevaron a los investigadores a buscar soluciones alternativas que permitiesen realizar circuitos con características iguales al de los filtros pasivos pero sin emplear inductores. 1-1 Capítulo 1 Introducción Uno de los primeros indicios de mejora de los filtros, surge en 1955 cuando dos investigadores: Sallen y Key, publicaron un articulo en el que se presentaban circuitos que realizaban las mismas características de los circuitos pasivos RLC pero sin emplear inductores. Estos circuitos estaban compuestos por resistencias, capacitores y amplificadores operacionales y se le conoce como filtro activo Sallen-Key en honor a sus inventores. 1.2 Justificación Es difícil encontrar un sistema o aparato electrónico en el que no se encuentre algún tipo de filtro. Los sistemas donde más aplicaciones tienen son en telecomunicaciones, los sistemas de audio, procesado de señales, y en toda fuente de poder. En los sistemas de telecomunicaciones para decodificar tonos en telefonía ya para separar canales de voz, para el sistema selectivo de canales como en los televisores o en canales de satélites. En los sistemas de audio se emplean en los controles de tonos y en las etapas de ecualización. En procesado de señales se pueden usar para mejorar imágenes transmitidas por satélites. En las fuentes de poder se usan para disminuir y eliminar el ruido debido a la frecuencia de los 60 Hz. de línea. Dependiendo del uso que se le dará al filtro se deben diseñar los parámetros adecuados para seleccionar u obstruir las frecuencias que se requieren. Este trabajo presenta el análisis y diseño de un filtro activo ya que son los más usuales por su estabilidad, alta ganancia y bajo costo. Este filtro selecciona las bajas frecuencias y omite las altas, y si lo que el usuario necesita es un buen selector pasabanda, solo se modifican sus parámetros y el filtro estará funcionando adecuadamente. 1-2 Capítulo 1 Introducción 1.3 Alcances y limitaciones La finalidad de este trabajo es diseñar un selector de frecuencias utilizando un filtro activo y demostrar su correcto funcionamiento mediante un simulador de circuitos. El filtro esta proyectado para operar como pasabanda y pasabaja; pero su fortaleza es como filtro pasabanda; en su implementación estaría afectado por la desviación ligera de los componentes de su valor nominal ya sea por causa del envejecimiento, a los corrimientos térmicos o por que muchas de las veces los valores de los elementos se tienen que aproximar ya que los calculados no siempre coinciden con los valores estándares existentes, y de esta manera las características del filtro cambian en un menor porcentaje con respecto al cambio del elemento. 1-3 Capítulo 2 Selectores de Frecuencias CAPÍTULO 2 SELECTORES DE FRECUENCIAS 2.1 Introducción Un filtro es un circuito selectivo en frecuencia, los filtros se diseñan para dejar pasar algunas frecuencias y rechazar otras. Hay numerosas formas para utilizar los circuitos de filtros. Los filtros sencillos creados con el uso de resistores y capacitares o con inductores y capacitores se denominan filtros pasivos porque utilizan componentes pasivos que no amplifican. Un tipo especial son los filtros activos que emplean redes RC con realimentación en circuitos con amplificadores operacionales que son caracterizados por ofrecer exactitud y estabilidad; sin embargo, es difícil diseñar un selector de frecuencia ideal, para esto utilizamos las aproximaciones de filtros pues entre más sea la aproximación que se desea, más elevado es el orden del filtro. Los selectores de frecuencia son filtros que permiten el paso de las frecuencias dentro de ciertas bandas, llamadas bandas de paso y bloquean las frecuencias en otras bandas, denominadas bandas de corte. Idealmente en las bandas de paso debería haber transmisión sin distorsión, y en las bandas de corte la ganancia debería ser nula. Existen cuatro tipos básicos de selectores de frecuencia: pasa bajas, pasa altas, pasa banda y rechaza banda, que mencionaremos en las secciones siguientes. 2-4 Capítulo 2 2.2 Selectores de Frecuencias Filtros ideales Los filtros ideales son selectores de frecuencia que permiten el paso sin distorsión de las componentes espectrales comprendidas en la o las bandas de paso, anulando completamente las componentes ubicadas fuera de ellas. 2.2.1 Pasa bajas La respuesta pasa bajas se caracteriza por una frecuencia c , que se llama la frecuencia de corte, tal que H =1 para < c y H =0 para > c lo que indica que las señales de entrada con frecuencia menor que c pasan a través del filtro sin cambiar su amplitud, mientras que las señales con > c sufren atenuación total. Una aplicación común de los filtros pasa bajas es la remoción de una señal de ruido de alta frecuencia. FIGURA 2-1 Diagramas de un filtro pasa bajas ideal. 2-5 Capítulo 2 Selectores de Frecuencias 2.2.2 Pasa altas La respuesta pasa altas es complementaria a la pasa bajas. Las señales con frecuencia mayor que la de corte c emergen del filtro sin atenuación, y las señales con < c resultan completamente bloqueadas. Figura 2-2 Diagrama de un filtro pasa altas ideal. 2.2.3 Pasa banda La respuesta pasa banda se caracteriza por una banda de frecuencia 1 < < 2 , que se llama banda de paso, tal que las señales de entrada dentro de esta banda emergen sin atenuación, mientras que las señales con < 1 o > 2 se rechazan. Un filtro conocido es el circuito de sintonía de un radio, que permite seleccionar una estación en particular y bloquear todas las demás. 2-6 Capítulo 2 Selectores de Frecuencias Figura 2-3 Diagrama de un filtro pasa banda ideal. 2.2.4 Rechazabanda La respuesta rechaza banda es complementaria a la respuesta pasa banda porque bloquea los componentes de la frecuencia dentro de la banda de rechazo 1 < < 2 , al tiempo que pasan todas las demás. Cuando la banda de rechazo es suficientemente estrecha, la respuesta se llama notch. Una aplicación de los filtros notch es la eliminación de la frecuencia de la línea de 60 Hz. en los equipos médicos. Figura 2-4 Diagrama de un filtro rechaza banda ideal. 2-7 Capítulo 2 Selectores de Frecuencias 2.3 Aproximaciones Desafortunadamente no existe ningún circuito que pueda realizar alguna de las funciones cuyas magnitudes ideales se describieron anteriormente. Lo único que se puede hacer es aproximar las magnitudes ideales. La figura 2-5 presenta varias opciones para aproximar una función pasa bajas. a) b) c) FIGURA 2-5 Aproximaciones de un filtro pasa bajas. La figura 2-5a muestra la aproximación Butterworth que corresponde a una función cuya magnitud es monótona, es decir, su magnitud siempre disminuye (o aumenta) cuando la frecuencia aumenta. En la Fig. 2-5b se tiene la aproximación tipo Chebyshev que presenta un rizo en la banda de paso y que es monótona en la banda de rechazo. La figura 2-5c muestra una función que tiene rizo tanto en la banda de Paso como en la banda de rechazo y recibe el nombre de aproximación elíptica o aproximación Caurer. 2-8 Capítulo 2 Selectores de Frecuencias 2.4 Filtros Pasivos Los filtros sencillos creados con el uso de resistores y capacitores o con inductores y capacitores se denominan filtros pasivos porque utilizan componentes pasivos que no amplifican. Los filtros RC utilizan una combinación de resistores y capacitores para obtener la respuesta deseada. La mayoría de los filtros son del tipo pasa altas. Aunque filtros supresores de banda o filtros de muesca se construyen también con circuitos RC, los filtros pasa banda pueden obtenerse combinando secciones de RC con filtros pasa bajas y pasa altas, pero esto se hace en raras ocasiones. Un filtro pasa bajas es un circuito que no introduce atenuación a frecuencias por debajo de la frecuencia de corte, pero que elimina por completo todas las señales con frecuencias arriba de la frecuencia de corte. Algunas veces estos filtros se denominan filtros de corte en altas. La forma mas sencilla de un filtro pasa bajas es el circuito RC que se muestra en la figura 2-6 El circuito forma un simple divisor de voltaje con un componente sensible a la frecuencia, en este caso el capacitor. A frecuencias muy bajas, el capacitor tiene una reactancia muy alta en comparación con la resistencia, por lo tanto, la atenuación es mínima. R Vi Vo C 0 fco= 1 2RC FIGURA 2-6 Circuito Filtro pasa bajas RC 2-9 Capítulo 2 Selectores de Frecuencias En cualquier frecuencia se puede determinar la salida por medio de la regla divisora de voltaje: Vo Como Z c Zc Vi Zc R (2.1a) 1 , entonces se tiene: jC 1 jC Vo Vi 1 R jC (2.1b) Además Xc 1 C (2.1c) Por lo que al sustituir en 2.1b se obtiene la siguiente ecuación: V0 Xc 90Vi R jXc (2.1d) para expresarlo en magnitud y en fase: A V0 Xc 90 Vi R jXc (2.2) 2-10 Capítulo 2 Selectores de Frecuencias Separando en magnitud y fase A A V0 Vi Xc 90 R 2 X c2 tan 1 ( Xc / R) Xc R X 2 2 C 90 tan 1 ( Xc / R) Entonces la magnitud queda expresada como: A V0 Vi Xc R 2 X C2 (2.3) A un ángulo de fase: 90 tan 1 ( Xc / R) (2.4) La frecuencia de corte, es la frecuencia para la cual Xc es igual a R Xc R (2.5) y sustituyendo la ecuación anterior en 2.1c se obtiene: R 1 0C 2-11 Capítulo 2 Selectores de Frecuencias O también R 1 2f 0 C De donde la frecuencia de corte es entonces f0 1 2RC (2.6) al sustituir X c por R en la ecuación 2.3 la ganancia es ahora: A V0 1 0.7071 Vi 2 (2.7) Esto se ilustra en la figura 2.7 FIGURA 2-7 grafica de respuesta en frecuencia, del filtro pasa bajas. 2-12 Capítulo 2 Selectores de Frecuencias El filtro pasa bajas también puede utilizarse con un inductor y un resistor como muestra la figura 2-8.La frecuencia de corte se determina mediante la formula: f0 R 2L (2.8) L Vi V0 R 0 FIGURA2-8 Filtro pasa bajas usado con un inductor Un filtro pasa altas, pasa frecuencias superiores a la frecuencia de corte con poca o nada de atenuación, pero atenúa en forma considerable las señales por abajo del corte, como se muestra en la figura 2-9. FIGURA 2-9 Curva De respuesta en frecuencia de un filtro pasa altas 2-13 Capítulo 2 Selectores de Frecuencias El filtro básico pasa altas RC se muestra en la figura 2-10a. De nuevo, no es algo mas que un divisor de voltaje, el único cambio que presenta es la conexión de la salida, la cual en vez de tomarse del capacitor se toma de la resistencia lo cual nos provoca que en vez de dejar pasar las frecuencia bajas pasen las frecuencias altas, cuando la frecuencia es demasiado baja, el voltaje se consume casi en su totalidad en el capacitor, el cual se comporta como una impedancia de valor muy alto, por lo que en la salida no se tiene casi voltaje, cuando la frecuencia aplicada es aumentada se tiene que el valor de la impedancia representada por el capacitor disminuye hasta que casi no consume voltaje, y la mayoría del voltaje se tiene a la salida. El filtro pasa altas también puede utilizarse con un inductor y un resistor como se muestra en la figura 2-10b. Vi V0 V0 Vi a) b) FIGURA 2-10 Filtro pasa altas a) RC y b) LC Los filtros RC sobre todo se utilizan en frecuencias bajas. Son muy comunes a frecuencias de audio pero rara vez se usan por arriba de 100khz. Es más común ver filtros LC construidos con inductores y capacitores. Los inductores para frecuencias bajas son grandes, voluminosos y caros pero los que se utilizan en frecuencias altas son muy pequeños, ligeros y baratos. 2-14 Capítulo 2 Selectores de Frecuencias Un Filtro pasa banda, es el que permite el paso de un intervalo de frecuencias angosto alrededor de una frecuencia central, fo , con una atenuación mínima, pero que rechaza las frecuencias por arriba y por debajo de esta intervalo. El ancho de banda de este filtro es la diferencia entre las frecuencias de corte superior e inferior, o BW= f2 –f1, también es igual a fo/Q1. Las frecuencias por arriba y por debajo de las frecuencias de corte se eliminan. La figura 2-11 muestra dos tipos de filtros pasa banda: En la 2-11a un circuito resonante serie se conecta en serie con un resistor de salida, formando así un divisor de voltaje. En frecuencias por arriba y por debajo de la frecuencia de resonancia, la reactancia inductiva o la reactancia capacitiva serán altas en comparación con la resistencia de salida; por lo tanto, la amplitud de salida será muy pequeña. Sin embargo a la frecuencia de resonancia, se cancelan las reactancias inductiva y capacitiva, dejando solo la resistencia pequeña del inductor. La mayor parte del voltaje de entrada aparece a través de la resistencia de salidas grande. En el circuito de la figura 2.11a X c X L , por lo que: 1 c L (2.9) De donde se obtiene f0 1 2 LC (2.10) 2-15 Capítulo 2 L Selectores de Frecuencias C R Vo/Vi R C L F 0 a) b) fo c) FIGURA 2-11 filtros pasa banda simples Los filtros supresores de banda, rechazan una banda de frecuencia angosta alrededor de una frecuencia central; en la figura 2-12 se muestra dos filtros supresores de banda LC típicos ; en la figura 2-12a el circuito LC resonante serie forma un divisor de voltaje con el resistor de entrada R. En frecuencias por arriba y por debajo de la frecuencia central de supresión o de muesca, la impedancia del circuito LC es alta en comparación con la de la resistencia; por lo tanto, las señales por arriba y por abajo de la frecuencia central pasarán con una atenuación mínima. En frecuencia central, el circuito sintonizado resuena dejando sólo la pequeña resistencia del inductor, lo que forma un divisor de voltaje con el resistor de entrada. Como la impedancia es muy baja en resonancia en relación con la resistencia, la señal de salida será muy pequeña en amplitud. En la figura 2-12b muestra una versión en paralelo, donde el circuito resonante paralelo se conecta en serie con un resistor del cual se saca la salida en frecuencias por arriba y por abajo de la frecuencia de resonancia, la impedancia de el circuito en paralelo es muy pequeña; hay, sin embargo, algo de atenuación en la señal y la mayor parte del voltaje de entrada aparecerá a través del resistor de salida. En frecuencia de resonancia el circuito en paralelo LC tienen una impedancia resistiva bastante alta en comparación con la resistencia de salida dando, por lo tanto, un voltaje mínimo ala frecuencia central. 2-16 Capítulo 2 C Selectores de Frecuencias R Vo/Vi L L1 R C F fo a) b) c) FIGURA 2-12 Filtros supresores de banda LC: a) serie b) paralelo, c) curva de respuesta 2.5 La función de Transferencia Ya se menciono que los filtros se realizan con dispositivos que tienen características que dependen de la frecuencia, como los capacitores e inductores. Cuando se someten a señales de ca, estos elementos se oponen al flujo de corriente de una manera que depende de la frecuencia, y también introducen un cambio de fase de 90° entre el voltaje y la corriente. Para tomar en cuenta este comportamiento, se usan las impedancias complejas ZL = sL Y Zc = l/sC, donde s j es la frecuencia compleja y es la frecuencia angular, en radianes por segundo (rad/s). El comportamiento de un circuito se caracteriza únicamente por su función de transferencia H(s). Para encontrar esta función, primero se obtiene una expresión para la salida Vo en términos de la entrada Vi. Luego, esta razón esta dada por: 2-17 Capítulo 2 Selectores de Frecuencias H ( s) V0 Vi (2.11) Y la función de transferencia resulta ser una función de s H ( s) N ( s) am s m am 1s m 1 ... a1s a0 D( s ) bn s n bn 1s n 1 ... b1s b0 (2.12) Donde N(s) y D(s) son polinomios apropiados en función de s con coeficientes reales y de grados m y el grado del denominador determina el orden del filtro (primer orden, segundo orden, etcétera). Las raíces de las ecuaciones N(s)=0 y D(s)=0 se llaman, respectivamente, los ceros y los polos de H(s), y se denotan como z1, z2, …zm, y p1, p2 …pn. Al factorizar N(s) y D(s) en términos de sus raíces respectivas, se puede escribir H ( s) H 0 ( s z1 )(s z2 )...(s zm ) ( s p1 )(s p2 )...(s pn ) (2.13) Donde a H o am / bn se le llama factor de escala. H(s) solo se determina una vez que se conocen H 0 y sus ceros y polos. 2-18 Capítulo 2 Selectores de Frecuencias 2.6 El amplificador operacional Un amplificador operacional es un circuito electrónico que tiene dos entradas y una salida, la salida es la diferencia de las dos entradas multiplicada por un factor de ganancia. Básicamente el Amplificador operacional es un dispositivo amplificador de la diferencia de sus dos entradas, con alta ganancia, una impedancia de entrada muy alta y una baja impedancia de salida, con estas características se deduce que las corrientes de entrada son prácticamente nulas. Los amplificadores operacionales se pueden conectar según dos circuitos amplificadores básicos: las configuraciones inversora y no inversora. Casi todos los demás circuitos con amplificadores operacionales están basados, de alguna forma, en estas dos configuraciones básicas. 2.6.1 Amplificador inversor El circuito amplificador con ganancia constante que se utiliza comúnmente es el amplificador inversor, que se muestra en la figura 2-13. Toda la tensión de entrada V1, deberá aparecer en R1, obteniendo una corriente en R1 igual a: I1 V1 R1 (2.14a) 2-19 Capítulo 2 Selectores de Frecuencias Rf R1 - Vn Vo V1 + 0 0 FIGURA 2-13 Multiplicador inversor de ganancia constante. Si Vn esta a un potencial cero, es un punto de tierra virtual, entonces toda la corriente I1 que circula por R1 pasara por Rf , puesto que no se derivará ninguna corriente hacia la entrada del operacional (impedancia infinita), así la corriente If será igual a : Vo Rf (2.14b) V V1 0 R1 Rf (2.14c) If Y como I1 es igual a If se tiene: Por lo que V0 Rf R1 V1 (2.15) 2-20 Capítulo 2 Selectores de Frecuencias Luego la ganancia del amplificador inversor es: (2.16) R V0 f V1 R1 2.6.2 Amplificador no inversor La figura 2-14 muestra un circuito que funciona como un amplificador no inversor o multiplicador de ganancia constante. Es necesario observar que la conexión del amplificador inversor es generalmente la más utilizada, ya que cuenta con una mejor estabilidad de frecuencia. + Vo V1 Rf 0 R1 0 FIGURA 2-14 Multiplicador no inversor Del circuito de la figura 2-14 se obtiene: V1 R1 V0 R1 R f (2.17) 2-21 Capítulo 2 Selectores de Frecuencias Reacomodando términos queda: V0 R1 R f V1 R1 O bien: Rf V0 1 V1 R1 (2.18) 2.6.3 Amplificador sumador Otra ventaja del amplificador inversor de voltaje es la posibilidad de operar con más de una entrada a la vez. Observe la figura 2-15 debido a la tierra virtual, los tres resistores de entrada están conectados efectivamente a tierra en el extremo derecho. Rf R1 V1 R2 V2 + R3 Vo V3 - 0 FIGURA 2-15 Amplificador sumador 2-22 Capítulo 2 Selectores de Frecuencias La corriente de entrada a través de R1 es: i1 V1 R1 (2.19a) i2 V2 R2 (2.19b) i3 V3 R3 (2.19c) la corriente en R2 es: y la corriente que pasa por R3 es: Así la suma de i1 + i2 + i3 , fluye a través de Rf , por lo que el voltaje de salida es: V0 (i1 i 2 i3 ) R f (2.19d) Y finalmente se obtiene: Rf Rf Rf V0 V1 V2 V3 R2 R3 R1 (2.20) 2-23 Capítulo 2 Selectores de Frecuencias 2.6.5 Diferenciador En la figura 2-16 se muestra un circuito con un capacitor conectado a la entrada del amplificador operacional y un resistor entre la entrada y la salida, a este circuito se le conoce como diferenciador. R C V1 - Vo + 0 FIGURA 2-16 Circuito diferenciador. V V1 0 1 R sC Vo V 1 1 R sC (2.21a) (2.21b) 2-24 Capítulo 2 Selectores de Frecuencias Vo R 1 V1 sC (2.21c) Vo RsC V1 (2.22) 2.6.4 Integrador Hasta ahora los componentes de entrada y de retroalimentación han sido solo resistores. Si el componente de retroalimentación utilizado es un capacitor, como se muestra en la figura 2-17, a la conexión resultante se le denomina integrador. C R1 + Vo - V1 0 0 Figura 2-17. El integrador 2-25 Capítulo 2 Selectores de Frecuencias Del circuito anterior obtenemos: V V1 0 1 R1 sC V0 V 1 1 R1 sC (2.23a) (2.23b) Despejando V0: V1 1 R1 sC (2.23c) V1 R1 sC (2.24) V0 1 V1 R1 sC (2.25) V0 O bien: V0 y la ganancia del integrador es: 2-26 Capítulo 2 Selectores de Frecuencias 2.7 Filtros Activos Los filtros LC son poco prácticos en baja frecuencia debido al tamaño, costo y baja calidad de los inductores, de allí la necesidad de contar con filtros sin inductores. Podría pensarse en redes RC, pero como sus polos están en el eje real negativo, no permiten obtener las aproximaciones clásicas, ni tampoco filtros muy selectivos. Surge la idea, entonces, de desplazar los polos originales de una red RC para reubicarlos en posiciones más favorables. Esto puede lograrse aplicando el concepto de realimentación, para lo cual hace falta agregar amplificadores que aporten la ganancia de lazo necesaria. Por este motivo, los filtros resultantes se denominan activos. Los Filtros Activos más sencillos se obtienen a partir de configuraciones básicas de amplificadores operacionales, por medio de usar una capacitancia como uno de sus componentes externos. Como Zc= 1 1 , el resultado es una ganancia con la sC jC magnitud y la fase que dependen de la frecuencia. Una de las herramientas más valiosas es la verificación asintótica, la cual se basa en las propiedades siguientes: lim Zc (2.26) lim Zc 0 (2.27) 0 2-27 Capítulo 2 Selectores de Frecuencias Significa que a frecuencias bajas, una capacitancia tiende a comportarse como un circuito abierto en comparación con los elementos circundantes y, a frecuencia altas, tiende a comportarse como un corto circuito. 2.7.1 Filtro pasa baja de primer orden. La colocación de un resistor en paralelo con el capacitor de retroalimentación, como en la figura 2-18a , convierte al integrador en un filtro pasa bajas con ganancia. R2 C R1 - Vo V1 + 0 0 Figura 2-18 Filtro pasa bajas con ganancia. Si 1 1 1 1 Z 2 R2 sC (2.28a) 2-28 Capítulo 2 Selectores de Frecuencias ( R Cs 1) 1 2 Z2 R2 (2.28b) Entonces Hs Z2 R1 o bien H ( s) Lo que indica un polo real en s R2 1 R1 R2 Cs 1 (2.29) 1 . Si s j , H(s) puede expresarse en la R2 C forma normalizada: H ( j ) H 0 1 j / 0 (2.30) R2 R1 (2.31) 1 R2C (2.32) H0 0 1 2-29 Capítulo 2 Selectores de Frecuencias 2.7.2 Filtro pasa alta de primer orden. Si al circuito inversor se coloca un capacitor en serie con el resistor de entrada, se convierte en un filtro pasa altas con ganancia. R1 C R2 V1 - Vo 0 + 0 Figura 2-19 Filtro pasa altas con ganancia Si Z1 R1 Z1 1 sC ( R1Cs 1) sC (2.33a) (2.33b) y H ( s) R2 Z1 (2.33c) 2-30 Capítulo 2 Selectores de Frecuencias queda H s R2 R1Cs R1 R1Cs 1 Que indica un cero en el origen y un polo real en s (2.34) 1 . Si s j , H(s) R1C puede expresarse en la forma normalizada: H ( j ) H 0 j / 0 1 j / 0 R2 R1 (2.36) 1 R1C (2.37) H0 0 (2.35) Donde H0 se llama la ganancia de alta frecuencia, y 0 de nuevo es la frecuencia de -3dB. 2-31 Capítulo 2 Selectores de Frecuencias 2.7.3 Filtro pasa banda de segundo orden Los últimos dos circuitos pueden unirse como en la figura 2-20 para obtener una respuesta pasa banda. C2 R1 C1 R2 V1 - Vo 0 + 0 Figura 2-20 Filtro pasa banda de banda ancha Si Z1 ( R1C1 s 1) C1 s (2.38a) Z2 R2 ( R2 C 2 s 1 (2.38b) y 2-32 Capítulo 2 Selectores de Frecuencias Por lo que se obtiene Z2 Z1 H ( s) o bien H ( s) R2 R1C1 s 1 R1 R1C1 s 1 R2 C 2 s 1 Lo que indica un cero en el origen y dos polos en 1 R1C1 y (2.39) 1 . Si s j , se R2 C 2 obtiene que H ( j ) H 0 j / L (1 j / L )(1 j / H ) (2.40) R2 R1 (2.41) L 1 R1C1 (2.42) H 1 R2C2 (2.43) H0 Donde H0 se denomina la ganancia de frecuencia media. El filtro es útil con L << H , en cuyo caso L y H se denominan las frecuencias de -3dB baja y alta. 2-33 Capitulo 3 Diseño del Filtro Activo CAPÍTULO 3 DISEÑO DEL FILTRO ACTIVO 3.1 Introducción. Los circuitos integrados dieron un auge importante al desarrollo de los filtros activos con la aparición de los amplificadores operacionales monolíticos, los cuales sirven como el elemento activo en los filtros activos-RC, evitando el empleo de circuitos discretos con transistores. El avance tecnológico ha hecho que el costo del elemento activo sea mas barato y por lo tanto ha permitido el uso de mas amplificadores para realizar una etapa activa-RC de segundo orden. A través del tiempo se han desarrollado varios tipos de filtros que emplean tres amplificadores operacionales para realizar una etapa bicuadratica. Entre los que se encuentran el Sallen-Key, el filtro de segundo orden de variable de estado también llamado KHN y el Tow-Thomas. Las ventajas que se obtienen con este tipo de filtros son varias entre las que se pueden destacar: sencillez en las ecuaciones de diseño y menor sensitividad. En este capitulo se exponen las bases analíticas que se requieren para la implementación de un filtro con características Tow-Thomas. 3-34 Capitulo 3 Diseño del Filtro Activo 3.2 Funciones de transferencia de segundo orden La función de transferencia de segundo orden es de particular importancia en el estudio de filtros eléctricos ya que sirve para formar funciones de orden mayor factorizando esta última en factores de segundo orden. Además los filtros activos importantes son siempre de segundo orden. La función de transferencia N(s) de segundo orden es de la forma: N ( s) A( s ) A( s ) 2 B( s ) s a1 s a0 (3.1) Otra forma de escribir la función de transferencia N(s) es escribir el denominador en términos de dos variables llamados Q y n como: A( s ) N ( s) s 2 n Q s (3.2) 2 n Relacionando las ecuaciones (3.1) y (3.2) se tiene que: a1 n Q (3.3) y a0 n2 (3.4) 3-35 Capitulo 3 Diseño del Filtro Activo al despejar n y Q se obtiene: n a0 (3.5) a0 a1 (3.6) Q 3.2.1 Función pasa baja Para la función de transferencia pasa bajas el numerador debe ser tal que la función N pL (s) satisfaga las siguientes dos condiciones. Primera: Debe tener un valor de ganancia H 0 a frecuencias bajas ( 0 ); segunda: Debe valer cero a frecuencias muy grandes ( ). La función de transferencia esta dada por: N pL ( s ) H 0n2 s 2 n Q s (3.7) 2 n De esta ecuación se observa que el grado del numerador es cero. 3-36 Capitulo 3 Diseño del Filtro Activo 3.2.2 Función Pasa banda El numerador A(s) de una función de transferencia pasa banda N pB (s ) debe hacer que N pB (s ) valga cero tanto para bajas frecuencias 0 como para altas frecuencias ( ) . De esta manera N pB (s ) será de la forma: N pb ( s ) H0 0 Q 0 s2 Q s s 02 (3.8) Donde se observa que se tiene dos ceros, uno en el origen y otro en el infinito. En la ecuación 3.8 0 es la frecuencia central del filtro pasabanda y Q forma el significado de factor de calidad definido por: Q 0 (3.9) B Note que entre más pequeño es B, más selectivo es el filtro pasabanda y más grande será el valor del factor de calidad Q. El valor del ancho de banda B esta definido entonces por: B 2 1 (3.10) y por lo tanto el factor de calidad Q esta dada por: Q 0 B 0 2 1 (3.11) 3-37 Capitulo 3 Diseño del Filtro Activo 3.3 Análisis del filtro activo. El circuito de la figura 3-1 muestra el filtro base Tow-Thomas, esta formado por tres amplificadores operacionales y consiste de dos integradores y un amplificador de ganancia unitaria. Como se verá en la obtención de las ecuaciones, podemos obtener una salida pasabanda (VPB) y otra pasabaja (VL). R3 C1 R1 C2 R R4 - R2 - + R VPB - V1 + VPL + 0 0 VPL2 0 0 FIGURA 3-1 Filtro activo. 3-38 Capitulo 3 Diseño del Filtro Activo 3.3.1 Función de transferencia pasabanda Para hacer más sencillo el análisis se divide el circuito de la figura 3-1 en tres secciones: En la figura 3-2 se presenta la primera sección: R R VPL - VPL2 + 0 FIGURA 3-2 Del circuito se obtiene: VPL V PL 2 R R VPL 2 V PL R R VPL 2 VPL (3.12) A continuación se analiza la segunda sección del filtro, esta se muestra en la figura 3-3. 3-39 Capitulo 3 Diseño del Filtro Activo C2 R2 VPB - VPL + 0 FIGURA 3-3 sección dos del filtro activo Del circuito anterior y aplicando leyes de corriente de Kirchhoff en la terminal inversora, se tiene: V PB V PL 1 R2 SC VPL VPB 1 R2 SC Y finalmente VPL VPB R2 SC 2 (3.13) Ahora se analizará la última sección que corresponde a entrada del filtro activo, tal como se observa en la figura 3-4. 3-40 Capitulo 3 Diseño del Filtro Activo C1 R1 R4 V1 - VPB VPL2 + R3 0 FIGURA 3-4 sección tres La suma de corrientes efectuada en la entrada inversora del circuito anterior da la siguiente ecuación: V1 VPL 2 VPB VPB R1 1 R3 R4 SC1 Reacomodando términos se tiene: V1 V PB V PB V PL 2 R 1 R3 R4 1 SC1 Sustituyendo el valor de VPL2 (ecuación 3.12) en la ecuación anterior, resulta: 3-41 Capitulo 3 Diseño del Filtro Activo V1 V PB V PB V PL R 1 R3 R4 1 SC1 En esta expresión se sustituye el valor de VPL encontrado en la ecuación 3.13, quedando de la siguiente manera: V1 V PB V PB V PB 1 R4 R R2 R3 SC 2 1 SC1 reacomodando términos se obtiene: V1 1 1 1 V PB 1 R4 R R2 R3 SC 2 1 SC1 Despejando: V PB 1 1 1 1 V1 R4 1 R1 1 / SC1 R2 R3 SC 2 3-42 Capitulo 3 Diseño del Filtro Activo Resolviendo y acomodando términos, se obtiene la función de transferencia pasabajas: 1 R4 V PB 1 1 V1 SC1 R1 R2 R3 SC 2 o también se puede expresar como: 1 R4 1 R4 VPB s 1 1 V1 sC1 R1 R2 R3 SC2 factorizando : VPB s V1 1 1 1 s s 2C1 s R1 R2 R3C2 1 s R4 VPB s V1 1 1 s s 2 C1 R2 R3C 2 R1 Reacomodando términos: 3-43 Capitulo 3 Diseño del Filtro Activo 1 s VPB R4 s V1 1 1 s 2 C1 s R1 R2 R3C 2 1 s VPB R4 s V1 1 1 C1 s 2 s R1C1 R2 R3C1C 2 Y finalmente obtenemos: 1 s R4 C1 VPB s 1 1 V1 s2 s R1C1 R2 R3C1C 2 (3.14) Relacionando esta expresión con la obtenida en 3.8 se deduce que: 0 1 R2 R3C1C2 (3.15) 1 R1C1 (3.16) y 0 Q 3-44 Capitulo 3 Diseño del Filtro Activo De 3.15 se obtiene: 1 0 R2 R3C1C2 (3.17) Como 1 0 1 Q Q 0 (3.18) entonces : 1 1 Q R1C1 R2 R3 C1C 2 (3.19a) O también: 1 1 Q R1 R2 R3 C1C 2 1 1 Q R1 R2 R3 C1C 2 C12 C12 (3.19b) (3.19c) 3-45 Capitulo 3 Diseño del Filtro Activo Otra deducción es: R 2 R3 C 2 C1 1 1 Q R1 (3.19d) Por lo que Q es: C1 R2 R3C 2 Q R1 (3.20) Estableciendo nuevamente la relación entre las ecuaciones 3.8 y 3.14 se deduce lo siguiente para H0: H0 0 Q 0 H0 (3.21a) Q Por lo tanto: 1 RC H0 4 1 1 R1C1 (3.21b) Resolviendo obtenemos: H0 R1 R4 (3.22) 3-46 Capitulo 3 Diseño del Filtro Activo 3.3.2 Función de transferencia pasabajas En el circuito de la figura 3.5, se muestra nuevamente el circuito activo, que se ha estado analizando, ahora se va a deducir la función de transferencia pasabajas, aunque para el caso propuesto es de importancia la salida pasabanda; sin embargo, se presenta con la finalidad de establecer una comparación de funcionamiento entre estas salidas y establecer criterios de comportamiento. I4 R3 I2 I6 C1 R1 I8 C2 R R4 - I3 R2 a - I1 + b I5 R c Vi + d e I7 + 0 0 0 f + Vo - 0 0 Figura 3-5 filtro activo En esta sección se analizara el circuito mediante nodos. Si se tiene que: I1 I 2 I 3 I 4 (3.23) Se sustituye y se obtiene: Vi Va Va Vb Va Vb Va V f R4 Z C1 R1 R3 (3.24) 3-47 Capitulo 3 Diseño del Filtro Activo Por corto virtual se sabe que Va = 0 y de esta manera se obtiene: Vi V V Vf b b R4 Z C1 R1 R3 Como Vf = Vo, entonces: 1 Vi 1 V Vb 0 ZC R4 1 R1 R3 (3.25) Ahora para I5 tenemos: I5 Vb Vc R2 (3.26) I6 VC V d Z C2 (3.27) Y para I6: Si I5=I6 y se sabe que Vc =0 por corto virtual; se resuelve (3.26) y (3.27) y se obtiene la ecuación: Vb V d R2 Z C2 (3.28) 3-48 Capitulo 3 Diseño del Filtro Activo A si mismo se tiene para I7 e I8 : I7 Vd Ve R (3.29) I8 Ve VF R (3.30) Cuando I7 = I8 y por corto virtual se sabe queVe = 0, entonces se obtiene: Vd V F R R (3.31) Y como VF = Vo, entonces: Vd VO (3.32) Así la ecuación (3.32)se sustituye en la ecuación (3.28) y se obtiene: Vb V 0 = R2 Z C 2 (3.33) Despejando Vb: Vb R2 V0 Z C2 (3.34) 3-49 Capitulo 3 Diseño del Filtro Activo ya que se tiene el valor de Vb (ecuación 3.34) se sustituye en la ecuación 3.25 de esta manera se tiene: 1 Vi 1 V Vb 0 ZC R4 1 R1 R3 R 1 Vi 1 V 2 VO 0 ZC Z C R4 2 1 R1 R3 Vi 1 V sC2 R2Vo sC1 0 R4 R1 R3 sC R V V Vi s 2 C1C 2 R2Vo 2 2 0 0 R4 R1 R3 s 2 C1C 2 R1 R2 R3 sC2 R2 R3 R1 Vi Vo R4 R R 1 3 s 2 C1C 2 R1 R2 R3 R4 sC2 R2 R3 R4 R1 R4 Vo Vi R1 R3 Vo R1 R3 2 Vi s C1C 2 R1 R2 R3 R4 sC2 R2 R3 R4 R1 R4 3-50 Capitulo 3 Diseño del Filtro Activo Vo Vi R1 R3 R1 R4 1 C1C 2 R1 R2 R3 R4 s 2 s C R C C R R R R 1 1 1 2 1 2 3 4 1 R1 R3 C1C 2 R1 R2 R3 R4 Vo Vi 2 1 1 s s C1 R1 C1C 2 R2 R3 1 Vo C1C2 R2 R4 s 1 1 Vi s2 s C1 R1 C1C2 R2 R3 (3.35) Para el filtro de 2º orden la función pasabajas es: Vo ( s) Vi H o n2 s2 n Q s n2 Y relacionando con la ecuación 3.35, se obtienen las siguientes ecuaciones: n 1 C1C 2 R2 R3 3-51 Capitulo 3 Diseño del Filtro Activo O también: n 1 R2 R3C1C 2 (3.36) Para obtener Q: n Q n (3.37) Q Q 1 C1C 2 R2 R3 1 C1 R1 Q R1 Ho C1 R2 R3C 2 H o n2 n2 1 CC R R Ho 1 2 2 4 1 C1C 2 R2 R3 Ho R3 R4 (3.38) (3.39) (3.40) (3.41) (3.42) 3-52 Capitulo 3 Diseño del Filtro Activo 3.4 Técnica de diseño 3.4.1 Diseño del filtro activo pasabanda Con la finalidad de facilitar los cálculos se emplea la siguiente técnica de diseño que consiste en hacer C1 C 2 C y R2 R3 R de esta manera las ecuaciones quedan simplificadas como sigue: 0 1 RC (3.43) Q R1 R (3.44) H0 R1 R4 (3.45) De estas ecuaciones se despejan los valores de los resistores: 1 0C (3.46) R1 QR (3.47) R1 H0 (3.48) R De la ecuación (3.44) se obtiene el valor de R1 : y R 4 la obtenemos de la ecuación (3.44): R4 3-53 Capitulo 3 Diseño del Filtro Activo 3.4.2 Diseño del filtro activo pasabaja Al igual que en el caso del filtro pasabanda, se toman las mismas consideraciones para este filtro, y se considera C1 C 2 C y R2 R3 R , así, las ecuaciones para el filtro activo pasabaja quedan de la siguiente manera: n Q 1 RC R1 R H0 (3.49) (3.50) R R4 (3.51) De estas ecuaciones despejamos los valores de los resistores: R 1 nC (3.52) El valor de R1 queda de la misma manera que para el filtro pasabanda ya que el valor de Q es el mismo para ambos circuitos: R1 QR La ganancia nos da el valor de R 4 de esta manera: R4 R H0 (3.53) 3-54 Capitulo 3 Diseño del Filtro Activo 3.5 Sensibilidad del filtro Activo Debido a las tolerancias de los componentes y a factores no ideales de los amplificadores operacionales, es probable que la respuesta de un filtro práctico se desvíe de lo que predice la teoría, es decir, si el valor de un elemento que compone el circuito se desvía ligeramente de su valor nominal ya sea por causa del envejecimiento o a los corrimientos térmicos, entonces las características del filtro cambian en un menor porcentaje con respecto al cambio del elemento. Por lo tanto, es de interés conocer que tan sensible es un filtro a las variaciones de los componentes. Dados un parámetro del filtro tal como 0 y Q y un componente x del filtro, tal como una resistencia R o una capacitancia C, la función clásica de sensibilidad S xy se define como: S xy y / y x y x / x y x (3.54) Donde las derivadas parciales se usan para tomar en cuenta el hecho de que por lo general, los parámetros del filtro dependen de más de un componente. Para cambios pequeños se puede aproximar: y x S xy y x (3.55) Esto permite estimar el cambio fraccional del parámetro y / y y que es ocasionado por el cambio fraccional del componente x / x al multiplicar ambos lados por 100, se obtiene una relación entre cambios porcentuales. La función de sensibilidad tiene las propiedades útiles que siguen: 3-55 Capitulo 3 Diseño del Filtro Activo S1y/ x S 1x / y S xy (3.56) S xx n (3.57) n 3.5.1 Análisis de Sensibilidad del filtro Activo Las sensibilidades del filtro activo que se esta analizando se obtienen de las ecuaciones referidas a 0 y Q ya que estos son los parámetros considerados para el filtro, de esta manera se obtienen los siguientes resultados: De acuerdo a la ecuación: 0 1 R2 R3C1C2 se tiene que 0 R21 / 2 R31 / 2 C11 / 2 C21 / 2 . De acuerdo a la 3.57 se tiene: S R20 S R30 S C10 S C20 1 2 y para R1 y R4 se tiene: S R10 S R40 0 Ahora respecto a Q: 3-56 Capitulo 3 Diseño del Filtro Activo Q R1 C1 R2 R3C 2 Se tiene que: Q= R1 R21/ 2 R31/ 2C11/ 2C21/ 2 , se aplica nuevamente la ecuación 3.57 y se tiene que: S RQ1 1 S R2 S R3 S CQ2 S CQ1 Q Q 1 2 Y para R4: S RQ4 0 De esta manera las sensibilidades para el filtro activo son: S R20, R3 ,C1 ,C2 S RQ1 1 1 2 S R10, R4 0 S R2 , R3 ,C2 S CQ1 Q 1 2 S RQ4 0 (3.58) (3.59) 3-57 Capítulo 4 Simulación y Resultados CAPÍTULO 4 SIMULACION Y RESULTADOS 4.1 Introducción. Es de suma importancia comprobar que el diseño que se realiza realmente opere como se espera, en otros tiempos sería necesario contar con múltiples instrumentos de laboratorio para demostrar su funcionamiento, pero gracias al gran avance computacional se cuenta con una potente herramienta de simulación de circuitos llamada SPICE del acrónimo: “Simulation Program for Integrated Circuits Emphasis”. Este programa es una herramienta de simulación de circuitos analógicos y mixtos que puede ser usada para comprobar el diseño de circuitos y para predecir su funcionamiento. Esto tiene especial importancia en los circuitos integrados y por esta razón, SPICE es la herramienta que se utiliza en este trabajo para demostrar el funcionamiento del circuito activo diseñado. 4.2 Pasa banda Se realizo la simulación con Pspice para diferentes valores de los parámetros: H, Q, n del filtro activo, se seleccionaron algunas frecuencias aleatorias de todas las efectuadas, con el objetivo de demostrar la coincidencia de los resultados analíticos con los del simulador. 4-58 Capítulo 4 Simulación y Resultados En las siguientes tablas se presentan los datos utilizados haciendo uso de las ecuaciones simplificadas (obtenidas en el capitulo anterior) para distintas frecuencias. A su vez los resultados de la simulación son presentados en las graficas, y como se puede observar la frecuencia central es aproximada a la esperada. Parámetros de diseño 0 =10Hz H0= 2 Q=10 C=0.1 F Valores Calculados Valores Comerciales R= 159.154 K R1= 1.59 M R4= 795 K R= 160 K R1= 1.6 M R4=820 K Tabla 4.1 Diseño pasabanda de 10Hz 2.5V Grafica de respuesta en frecuencia centrada en 10 Hz. 2.0V 1.5V 1.0V 0.5V 0V 1.0Hz V(R2:1) 10Hz 100Hz Frequency Fig. 4.1 Resultado de la simulación de filtro pasabanda de 10Hz. 4-59 Capítulo 4 Simulación y Resultados Parámetros de diseño 0 =100Hz Valores Calculados Valores Comerciales R= 3.386 K R=3.3 K H0= 5 R1= 27.09 K R1= 27 K Q=8 R4= 5.41 K R4= 5.6 K C=0.47 F Tabla 4.1 Diseño pasabanda de 100Hz 6.0V Grafica de respuesta en frecuencia, centrada en 100Hz. 5.0V 4.0V 3.0V 2.0V 1.0V 0V 10Hz V(R2:1) 100Hz 1.0KHz Frequency Fig. 4.1 Resultado de la simulación de filtro pasabanda de 100hz. 4-60 Capítulo 4 Simulación y Resultados Parámetros de diseño 0 =300 Hz Valores Calculados Valores Comerciales R=530.5 K R=510 K H0= 4 R1= 5.30 M R1= 5.1 M Q=10 R4= 1.32 M R4= 31.3 M C=10nF Fig. 4.1 Resultado de la simulación de filtro pasabanda de 300hz. 5.0V Grafica de Respuesta en Frecuencia, centrada a 300Hz. 4.0V 3.0V 2.0V 1.0V 0V 10Hz V(R2:1) 30Hz 100Hz 300Hz 1.0KHz 3.0KHz 10KHz Frequency Fig. 4.1 Resultado de la simulación de filtro pasabanda de 300hz. 4-61 Capítulo 4 Simulación y Resultados Parámetros de diseño 0 =1KHz Valores Calculados Valores Comerciales R=159.15K R=160 K H0= 5 R1= 1.59M R1= 1.6 M Q=10 R4= 318 K R4= 330 K C=1nF Fig. 4.1 Resultado de la simulación de filtro pasabanda de 1Khz. 6.0V Grafica de Respuesta en frecuencia, centrada a 1KHz. 5.0V 4.0V 3.0V 2.0V 1.0V 0V 100Hz V(R2:1) 1.0KHz 10KHz Frequency Fig. 4.1 Resultado de la simulación de filtro pasabanda de 1Khz. 4-62 Capítulo 4 Simulación y Resultados 4.3 Pasabajas El filtro activo cuenta con una salida pasabajas, por ello también se realizó un conjunto de simulaciones que permitieran conocer la respuesta de los mismos y su desviación con respecto a los resultados analíticos; sin embargo no es posible colocar a todos los resultados, por lo que se ha optado por presentar algunas diseños para determinadas frecuencias de corte y con ello poder ilustrar su comportamiento. En las siguientes figuras, se presentan los resultados de la simulación para las frecuencias de 10Hz, 100Hz, 300Hz y 1KHz. Como se puede observaren las figuras, los resultados son muy similares a los calculados. Parámetros de diseño 0 = 10 Hz H0 = 5 Q = 0.7 C = 0.1 F Valores Calculados R = 159.15K R1= 112K R4 = 31.83 K Valores Comerciales R = 160 K R1 = 160 K R4 = 30 K Fig. 4.1 Resultado de la simulación de filtro pasabajas de 10 hz. 6.0V 5.0V 4.0V 3.0V 2.0V 1.0V 0V 1.0Hz V(U3:OUT) 3.0Hz 10Hz 30Hz 100Hz 300Hz 1.0KHz Frequency Fig. 4.1 Resultado de la simulación de filtro pasabajas de 10 hz. 4-63 Capítulo 4 Simulación y Resultados Parámetros de diseño Valores Calculados 0 =100 Hz Valores Comerciales R = 3.386 K R = 3.3 K H0 = 10 R1= 2.31 K R1 = 2.2 K Q = 0.7 R4 = 338.6 K R4 = 330 C = 0.47 F Fig. 4.1 Resultado de la simulación de filtro pasabajas de 100 hz. 12V 10V 8V 6V 4V 2V 0V 1.0Hz 3.0Hz V(U3:OUT) 10Hz 30Hz 100Hz 300Hz 1.0KHz 3.0KHz 10KHz 30KHz 100KHz Frequency Fig. 4.1 Resultado de la simulación de filtro pasabajas de 100hz. 4-64 Capítulo 4 Simulación y Resultados Parámetros de diseño 0 = 300Hz Valores Calculados Valores Comerciales R = 241.14 R = 240 H0 = 1 R1= 241.14 R1 = 240 K Q=1 R4 = 241.14 R4 = 240 C = 2.2 F Fig. 4.1 Resultado de la simulación de filtro pasabajas de 300 hz. 1.2V 1.0V 0.8V 0.6V 0.4V 0.2V 0V 1.0Hz V(R3:2) 3.0Hz 10Hz 30Hz 100Hz 300Hz 1.0KHz 3.0KHz 10KHz 30KHz 100KHz Frequency Fig. 4.1 Resultado de la simulación de filtro pasabajas de 300 hz. 4-65 Capítulo 4 Simulación y Resultados Parámetros de diseño 0 =1KHz Valores Calculados Valores Comerciales R = 159.15K R = 160 K H0 = 10 R1 = 111.41K R1 = 110 K Q = 0.7 R4 = 15.91 K R4 = 16 K C = 1nF Fig. 4.1 Resultado de la simulación de filtro pasabajas de 1Khz. 12V 10V 8V 6V 4V 2V 0V 1.0Hz 3.0Hz V(U3:OUT) 10Hz 30Hz 100Hz 300Hz 1.0KHz 3.0KHz 10KHz 30KHz 100KHz Frequency Fig. 4.1 Resultado de la simulación de filtro pasabajas de 1 Khz. 4-66 Conclusiones CONCLUSIONES En el presente trabajo se desarrollo el diseño de un filtro activo, utilizando técnicas conocidas en el diseño de filtros activos. La parte más importante se concentro desde luego en el diseño y simulación del filtro activo. Con el apoyo del simulador Pspice se pudo obtener la visualización de los resultados de acuerdo a las condiciones y especificaciones del diseño, así como también el de poder predecir el comportamiento del filtro, evaluar resultados, detectar y corregir posibles errores de diseño. Con el objeto de validar el diseño obtenido, se realizo la simulación con Pspice para diferentes valores de los parámetros: H, Q y n del filtro activo, y después de analizar las graficas de todas las simulaciones realizadas se pueden establecer las siguientes conclusiones: Este filtro presenta una sensibilidad muy baja lo cual implica que es un filtro confiable. El filtro activo diseñado funciona perfectamente como pasa banda con valores de Q mayores a la unidad. 67 Conclusiones En el caso de usarlo como pasa bajas es indispensable que el Q sea menor que la unidad para que la respuesta de la frecuencia no presente disparos en la ganancia de voltaje (amortiguamiento) en frecuencias cercanas a la frecuencia de corte, lo que no es deseable en el diseño. Finalmente, es importante mencionar que la implementación del filtro activo pasa banda puede ser realizada con mucha confiabilidad, ya que con todos los datos obtenidos del diseño y la simulación, se tiene la certeza que responderá a las condiciones de operación propuestas. 68 iii