Sean dos puntos ( y ( del espacio. Entonces las coordenadas o
Anuncio

Geometría. Puntos, rectas y planos en el espacio. Problemas métricos en el espacio
Pedro Castro Ortega
1. Coordenadas o componentes de un vector
Sean dos puntos A ( a1 , a 2 , a 3 ) y B ( b1 , b 2 , b3 ) del espacio. Entonces las coordenadas o componentes del
uuur
uuur
uuur uuur
uuur uuur
vector AB son: AB = ( b1 − a1 , b 2 − a 2 , b3 − a 3 ) . Dos vectores AB , CD son equivalentes ( AB = CD ) si tienen
las mismas coordenadas o componentes. Al conjunto de todos los vectores con las mismas coordenadas lo
r
llamaremos vector libre y lo denotaremos genéricamente mediante u . El vector nulo es aquel que tiene
r
r
coordenadas (0, 0, 0). Si u tiene coordenadas ( u1 , u 2 , u 3 ) , entonces el vector opuesto, − u , tiene coordenadas
r
( −u1 , − u 2 , − u 3 ) . Si u y vr son dos vectores con coordenadas ( u1 , u 2 , u 3 ) y ( v1 , v 2 , v3 ) , respectivamente,
r r
entonces el vector suma u + v tiene coordenadas ( u1 + v1 , u 2 + v 2 , u 3 + v3 ) y dado un número λ ∈ ¡ el
r
r
producto de un número por el vector u , λ u tiene coordenadas ( λu1 , λu 2 , λu 3 )
2. División de un segmento en n partes iguales
Sea un segmento de extremos A ( a1 , a 2 , a 3 ) y B ( b1 , b 2 , b3 )
ü Coordenadas de un punto C que dividen al segmento AB en dos partes iguales:
1
1
1
a + b a + b 2 a 3 + b3
C = a1 + (b1 − a 1 ), a 2 + (b 2 − a 2 ), a 3 + (b3 − a 3 ) = 1 1 , 2
,
2
2
2
2
2
2
ü Coordenadas de dos puntos C y D que dividen al segmento AB en tres partes iguales:
1
1
1
C = a1 + (b1 − a1 ), a 2 + (b 2 − a 2 ), a 3 + (b3 − a 3 )
3
3
3
2
2
2
D = a1 + (b1 − a1 ), a 2 + (b 2 − a 2 ), a 3 + (b3 − a 3 )
3
3
3
ü Coordenadas de tres puntos C, D y E que dividen al segmento AB en cuatro partes iguales:
1
1
1
C = a1 + (b1 − a1 ), a 2 + (b 2 − a 2 ), a 3 + (b3 − a 3 )
4
4
4
2
2
2
D = a1 + (b1 − a1 ), a 2 + (b 2 − a 2 ), a 3 + (b3 − a 3 )
4
4
4
3
3
3
E = a1 + (b1 − a1 ), a 2 + (b 2 − a 2 ), a 3 + (b3 − a 3 )
4
4
4
ü Y así sucesivamente para dividir un segmento en n partes iguales.
3. Vector director de una recta y ecuaciones de la recta
r
Dada una recta r se llama vector director de la recta r a un vector libre u que tenga la dirección de la recta r.
r
Supongamos que de una recta r conocemos un punto A ( a1 , a 2 , a 3 ) y un vector director u = ( u1 , u 2 , u 3 ) .
Supongamos también que P(x, y, z) es un punto cualquiera de dicha recta. Entonces:
uuur
r
ü Ecuación vectorial de la recta: AP = λu ⇒ ( x − a1 , y − a 2 , z − a 3 ) = λ ( u1 , u 2 , u 3 ) (1)
x − a 1 = λ u1
x = a 1 + λ u1
ü Ecuaciones paramétricas de la recta: de (1) se deduce que y − a 2 = λ u 2 ⇒ y = a 2 + λu 2 (2)
z − a = λu
z = a + λu
3
3
3
3
x − a1 y − a 2 z − a 3
=
=
ü Ecuaciones continuas de la recta: eliminando el parámetro de (2)
u1
u2
u3
Nota: si alguna de las coordenadas del vector es nula, también podremos escribir las ecuaciones continuas de la recta. Entonces aparecerá un
cero en algún denominador. Aunque aparentemente esto no tenga sentido, lo interpretaremos no como un cociente, sino como una
proporcionalidad, en la que el producto de medios es igual al producto de extremos. Ello supone que el numerador correspondiente se anula.
ü Ecuación de una recta conociendo dos puntos: si conocemos dos puntos A ( a1 , a 2 , a 3 ) y B ( b1 , b 2 , b3 )
z − a3
x − a1
y − a2
r uuur
⇒ u = AB = ( b1 − a1 , b 2 − a 2 , b3 − a 3 ) , y entonces la ecuación es
=
=
b1 − a1 b 2 − a 2 b3 − a 3
1
Geometría. Puntos, rectas y planos en el espacio. Problemas métricos en el espacio
Pedro Castro Ortega
4. Ecuaciones de un plano
Un plano π queda definido si conocemos un punto A ( a1 , a 2 , a 3 )
P
r
r
r
u
perteneciente a él y dos vectores u = ( u1 , u 2 , u 3 ) y v = ( v1 , v 2 , v3 ) de
A r
v
dirección diferente contenidos en él. Tomando un punto P(x, y, z) cualquiera
uuur
r r
del plano, el vector AP deberá ser combinación lineal de los vectores u y v ,
es decir, deberán existir unos escalares λ y µ tales que:
uuur
r
r
ü Ecuación vectorial del plano: AP = λu + µv ⇒ ( x − a1 , y − a 2 , z − a 3 ) = λ ( u1 , u 2 , u 3 ) + µ ( v1 , v 2 , v3 ) (3)
x − a1 = λu1 + µv1
x = a1 + λu1 + µv1
ü Ecuaciones paramétricas del plano: de (3) y − a 2 = λu 2 + µv 2 ⇒ y = a 2 + λu 2 + µv2 (4)
z − a = λu + µv
z = a + λu + µv
3
3
3
3
3
3
ü Ecuación implícita, general o cartesiana de un plano: considerando (4) como un sistema de tres
ecuaciones con dos incógnitas (λ y µ), debe ocurrir, para que halla soluciones y así el plano tenga sentido,
u1 v1
u1 v1 x − a1
que el rango de las matrices u 2 v 2 (matriz de los coeficientes) y u 2 v 2 y − a 2 (matriz ampliada)
u v
u v z−a
3
3
3
3
3
r
r
sea el mismo (rango = 2 pues u = ( u1 , u 2 , u 3 ) y v = ( v1 , v 2 , v3 ) son linealmente independientes).
u1
v1
x − a1
Entonces el determinante de la matriz ampliada deber ser igual a cero: u 2
u3
v2
y − a 2 = 0 . Este
v3
z − a3
determinante también se puede escribir así:
x − a1
y − a2
z − a3
u1
u2
u3
= 0 (5). Desarrollando este determinante
v1
v2
v3
se obtiene la ecuación implícita, general o cartesiana del plano: Ax + By + Cz + D = 0
ü Ecuación de un plano conociendo tres puntos: dados tres puntos no alineados A ( a1 , a 2 , a 3 ) ,
uuur
r uuur
B ( b1 , b 2 , b3 ) y C ( c1 , c 2 , c3 ) ⇒ u = AB = ( b1 − a1 , b 2 − a 2 , b3 − a 3 ) y v = AC = ( c1 − a1 , c 2 − a 2 , c3 − a 3 ) .
x − a1
y − a2
z − a3
Entonces por (5) b1 − a1
c1 − a1
b2 − a 2
b3 − a 3 = 0 , determinante que vale los mismo que este otro de cuarto
c2 − a 2
c3 − a 3
orden:
x − a1
y − a2
z − a3
0
b1 − a1
b2 − a 2
b3 − a 3
0
c1 − a1
c2 − a 2
c3 − a 3
0
a1
a2
a3
1
= 0 y sumando la cuarta fila a las otras tres tenemos la ecuación del
x
plano que pasa por A, B y C, expresada por medio de un determinante:
y
z
1
b1 b 2
b3 1
c1
c2
c3 1
a1
a2
a3 1
=0
5. Posiciones relativas de dos rectas
r
r
Sea r determinada por A ( a1 , a 2 , a 3 ) y u = ( u1 , u 2 , u 3 ) y s determinada por B ( b1 , b 2 , b3 ) y v = ( v1 , v 2 , v3 ) .
ü Coincidentes: tienen todos sus puntos comunes
ü Paralelas: no tienen ningún punto en común, y además existe un plano que contiene a ambas rectas.
ü Secantes: tienen un punto en común.
ü Se cruzan: no tienen ningún punto en común y no existe ningún plano que contenga a ambas rectas.
2
Geometría. Puntos, rectas y planos en el espacio. Problemas métricos en el espacio
Pedro Castro Ortega
5.1. Rectas coincidentes
r
r
En este caso u y v tienen la misma dirección. Además el vector
uuur
AB tiene la misma dirección que los anteriores. Por tanto, la
condición para que dos rectas sean coincidentes es:
u2
u3
u1
u1 u 2 u 3
v2
v3 = 1
rango
= rango v1
v1 v 2 v3
b −a b −a b −a
2
2
3
3
1 1
r
u
r
s
r
v
B
A
5.2. Rectas paralelas
r
r
En este caso los vectores
uuur u y v también tienen rla misma dirección.
Pero la dirección de AB es distinta de la de u y v. Así pues, la
condición para que dos rectas sean paralelas es:
u2
u3
u1
u1 u 2 u 3
v2
v3 = 2
rango
= 1 ; rango v1
v1 v 2 v3
b −a b −a b −a
2
2
3
3
1 1
r
r
u
A
r
v
s
B
5.3. Rectas secantes
r
v
r
r
En esteuuu
caso
los vectores u y v tienen distinta dirección. Además, el
r
r
r
vector AB está contenido en el plano determinado por u y v . Entonces,
la condición para que dos rectas sean secantes es:
u2
u3
u1
u1 u 2 u 3
v2
v3 = 2
rango
= rango v1
v1 v 2 v3
b −a b −a b −a
2
2
3
3
1 1
5.4. Rectas que se cruzan
r
r
En este caso las direcciones de los vectores u y v son distintas,
uuur
r
pero el vector AB no está contenido en el plano determinado por u
r
r
r
y v (no puede pues obtenerse como combinación lineal de u y v ).
Así pues, la condición para que dos rectas se crucen es:
u2
u3
u1
u1 u 2 u 3
v2
v3 = 3
rango
= 2 ; rango v1
v1 v 2 v3
b −a b −a b −a
2
2
3
3
1 1
r
u
A
B
s
r
r
r
u
A
r
v
s
B
6. Posiciones relativas de una recta y un plano
x = a 1 + λu 1
Escribamos la recta en paramétricas r: y = a 2 + λu 2 y el plano en ecuación implícita π: Ax + By + Cz + D = 0
z = a + λu
3
3
Si un punto de la recta pertenece también al plano, entonces, al sustituir sus coordenadas en la ecuación general
Ax + By + Cz + D = 0, ésta debe satisfacerse: A ( a1 + λu1 ) + B ( a 2 + λu 2 ) + C ( a 3 + λu 3 ) + D = 0 , es decir:
( Aa1 + Ba 2 + Ca 3 + D ) + λ ( Au1 + Bu 2 + Cu 3 + D ) = 0
(6)
− ( Aa1 + Ba 2 + Ca 3 + D )
⇒
λ
=
( Au1 + Bu 2 + Cu 3 + D )
Los valores de λ que cumplen esta ecuación determinan los puntos de la recta que pertenecen también al plano.
ü Recta contenida en el plano: si todos los puntos de la recta pertenecen al plano.
ü Recta y plano paralelos: si no tienen ningún punto en común.
ü Recta y plano secantes: si tienen un punto en común.
3
Geometría. Puntos, rectas y planos en el espacio. Problemas métricos en el espacio
Pedro Castro Ortega
6.1. Recta contenida en el plano
En este caso todos los puntos de la recta pertenecen también al plano, lo cual
significa que todo valor λ es solución de la anterior ecuación (6). Para que
esto sea posible ha de ser:
Au1 + Bu 2 + Cu 3 + D = 0 ; Aa1 + Ba 2 + Ca 3 + D = 0
r
π
r
6.2. Recta y plano paralelos
En este caso ningún punto de la recta pertenece al plano, lo cual significa
que no hay ningún valor de λ que sea solución de la ecuación (6). Para que
esto ocurra ha de ser:
Au1 + Bu 2 + Cu 3 + D = 0 ; Aa1 + Ba 2 + Ca 3 + D ≠ 0
π
r
6.3. Recta y plano secantes
En este caso un único punto de la recta pertenece al plano, lo cual significa
que hay un único valor de λ que es solución de la anterior ecuación (6). Para
que esto ocurra ha de ser:
Au1 + Bu 2 + Cu 3 + D ≠ 0
π
7. Posiciones relativas de dos planos
Dos planos π ≡ Ax + By + Cz + D = 0 y π ' ≡ A ' x + B' y + C 'z + D ' = 0 en el espacio pueden adoptar una de las
siguientes posiciones relativas:
ü Planos coincidentes: son los que tienen todos sus puntos comunes.
ü Planos paralelos: son los que no tienen ningún punto en común.
ü Planos secantes: son los que tienen una recta común.
Ax + By + Cz + D = 0
Los puntos pertenecientes a ambos planos son las soluciones del sistema
(7), luego
A ' x + B ' y + C 'z + D ' = 0
la posición relativa vendrá determinada por el carácter del mencionado sistema y por tanto de los rangos
respectivos de la matriz de los coeficientes y de la matriz ampliada.
7.1. Planos coincidentes
En este caso las ecuaciones del sistema (7) deben ser equivalentes (proporcionales) y los rangos de ambas
A B C
A B C D
matrices son iguales a 1: rango
= rango
=1
A ' B' C '
A ' B' C ' D '
π'
π
A B C D
=
=
=
Obsérvese que esta condición es equivalente a esta otra:
A ' B' C ' D '
7.2. Planos paralelos
Si el rango de la matriz de los coeficientes es 1 y el de la matriz ampliada es 2,
es sistema (7) es incompatible y los planos serán paralelos:
A B C
A B C D
rango
= 1 ; rango
=2
A ' B' C '
A ' B' C ' D '
Condición que es equivalente a esta otra:
π
π'
A B C D
=
=
≠
A ' B' C ' D '
7.3. Planos secantes
En este caso basta con que el rango de la matriz de los coeficientes sea
A B C
igual a 2: rango
= 2
A
'
B'
C
'
La recta solución vendrá dada por las infinitas soluciones del sistema (7).
π
π'
4
Geometría. Puntos, rectas y planos en el espacio. Problemas métricos en el espacio
Pedro Castro Ortega
8. Ecuaciones implícitas de una recta
Según se ha visto en el apartado anterior, dos planos secantes se cortan en una recta. Por tanto, el conjunto de
las dos ecuaciones del sistema (7) pueden considerarse como las ecuaciones de una recta. Llamaremos a éstas
Ax + By + Cz + D = 0
ecuaciones implícitas de la recta r:
A ' x + B ' y + C 'z + D ' = 0
8.1. Paso de ecuaciones continuas a forma implícita
Si tenemos una recta en forma continua
x − a1 y − a 2 z − a 3
, para pasar a forma implícita basta multiplicar
=
=
u1
u2
u3
u 2 ( x − a1 ) = u1 ( y − a 2 ) u 2 x − u1 y + ( u1a 2 − u 2 a1 ) = 0
en cruz las dos igualdades:
⇒
u 3 ( y − a 2 ) = u 2 ( z − a 3 ) u 3 y − u 2 z + ( u 2 a 3 − u 3a 2 ) = 0
8.2. Paso de forma implícita a continua
Ax + By + Cz + D = 0
Se procede resolviendo el sistema formado por las ecuaciones implícitas:
. Veámoslo
A ' x + B ' y + C 'z + D ' = 0
con un ejemplo:
3x − y − 2x − 6 = 0
3x − y = 2λ + 6
Sea la recta
. Llamamos z = λ ⇒
. Sumando ambas ecuaciones se obtiene
x + y = −λ + 2
x + y + z − 2 = 0
λ
λ
λ
5λ
4x = λ + 8 ⇒ x = + 2 . Sustituyendo en la segunda ecuación: + 2 + y = −λ + 2 ⇒ y = −λ − ⇒ y = − .
4
4
4
4
5λ
λ
Por tanto las soluciones son (x, y, z) = + 2, − , λ , y de aquí podemos escribir la recta en forma su
4
4
5λ
5
λ
1
vectorial; (x, y, z) = (2, 0, 0) + , − , λ = (2, 0, 0) + λ , − , 1 , de donde se deduce que un punto de la
4
4
4
4
5
1
r
recta es A(2, 0, 0) y un vector director es v = , − , 1 y también lo será uno proporcional a éste:
4
4
r
u = (1, −5, 4) (multiplicamos por el denominador común y así prescindimos de fracciones en la ecuación
x −2 y z
=
=
continua). Así pues la ecuación continua es:
1
−5 4
9. Haz de planos
Dada una recta r en el espacio, el conjunto de planos que pasan por ella se llama
r
haz de planos de arista r. Si la recta está dada en forma implícita
Ax + By + Cz + D = 0
, el haz de planos se obtiene al dar a λ y µ todos los
A ' x + B ' y + C ' z + D ' = 0
valores posibles, excepto λ = 0 y µ = 0 simultáneamente, en la expresión:
λ ( Ax + By + Cz + D ) + µ ( A ' x + B' y + C ' z + D ' ) = 0
El empleo del haz de planos facilita la resolución de algunos problemas. Por
ejemplo:
x − y + 1 = 0
ü Hallar la ecuación del plano que contiene a la recta
y pasa por
2x − z = 0
el punto (3, −2, 6).
El plano buscado será de la forma: λ(x − y + 1) + µ(2x − z) = 0. Si pasa por el punto (3, −2, 6) estas
coordenadas deben satisfacer la ecuación del plano, luego: λ(3 + 2 + 1) + µ(6 + 6) = 0 ⇒ 6λ + 12µ = 0
⇒ λ + 2µ = 0. Busquemos unos valores de λ y µ que cumplan esta última expresión, por ejemplo, λ = 2
y µ = −1. Por lo tanto, el plano buscado será 2(x − y + 1) − 1(2x − z) = 0 ⇒ −2y + z + 2 = 0
5
Geometría. Puntos, rectas y planos en el espacio. Problemas métricos en el espacio
Pedro Castro Ortega
10. Producto escalar de dos vectores
r
r
Dado un vector libre u del espacio, se llama módulo de u a su longitud, y lo
r
r r
representaremos por u . Se llama producto escalar de dos vectores u y v , y
r r
se representa u · v a la expresión:
r r
r r
u · v = u v cos α
r r
donde α es el menor ángulo formado por los vectores u y v
r r
u×v
α
r
v
r
u
10.1. Propiedades del producto escalar
r r r r
Conmutativa: u · v = v · u
r r
r r r r
r
Distributiva respecto de la suma: u ·( v + w ) = u · v + u · w
r r
r r r
r
Asociativa mixta: k( u · v ) = (k u )· v = u ·(k v ), donde k ∈ ¡
r
r r
r
Si dos vectores son perpendiculares su producto escalar es cero: u ⊥ v ⇒ u · v = 0
Si el producto escalar de dos vectores es cero, y los vectores son ambos no nulos, entonces los vectores son
r r
r r
r
r
perpendiculares: u · v = 0 ; u , v ≠ 0 ⇒ u ⊥ v
r r
f) Si las coordenadas de u y v son, respectivamente, ( u1 , u 2 , u 3 ) y ( v1 , v 2 , v3 ) , entonces el producto escalar
r r
se puede expresar de la siguiente manera: u ⋅ v = u1 v1 + u 2 v 2 + u 3 v3
a)
b)
c)
d)
e)
10.2. Expresión del módulo de un vector utilizando el producto escalar
El módulo de un vector es igual a la raíz cuadrada positiva del producto escalar de dicho vector por sí mismo:
r
r r
u = + u⋅u
Utilizando f) y la expresión anterior:
r
u = + u12 + u 2 2 + u 3 2
r
Se llama vector unitario o normal a aquel cuyo módulo vale 1. Normalizar un vector u es encontrar un
r
r
r
vector v unitario que tenga la misma dirección y sentido que u . Para obtener v, basta multiplicar u por el
r 1 r
inverso de su módulo: v = r u
u
11. Producto vectorial de dos vectores
r r
r
r
Dados dos vectores libres u y v , se llama producto vectorial de u por v al vector que:
r r
ü Tiene por módulo u v sen α, donde α es el menor ángulo formado por los vectores.
r r
ü Tiene la dirección de la perpendicular al plano determinado por u y v
r
r
ü Tiene el sentido de girar desde u hacia v (regla del sacacorchos).
r r
r r
El producto vectorial de u y v se representa así: u × v .
11.1. Propiedades del producto vectorial
a)
b)
c)
d)
e)
r r
r r
Anticonmutativa: u × v = −( v × u )
r r
r r
r r
r
Distributiva respecto a la suma: u ×( v + w ) = u × v + u × w
r r
r r r
r
Asociativa mixta: k( u × v ) = (k u )× v = u ×(k v ), donde k ∈ ¡
r r
r r r
Si u y v tienen la misma dirección ⇒ u × v = 0
r
r
Si las coordenadas de u y v son, respectivamente, ( u1 , u 2 , u 3 ) y
( v1 , v 2 , v3 ) ,
r
i
r r
vectorial se obtiene al desarrollar la primera fila del determinante: u × v = u1
v1
r
j
u2
v2
entonces el producto
r
k
r r
r
u 3 , donde i , j y k
v3
r r r
son, respectivamente los vectores (1, 0, 0), (0, 1, 0) y (0, 0, 1). El conjunto { i , j , k } es un sistema de
referencia ortonormal (conjunto de tres vectores de módulo uno perpendiculares dos a dos). Por tanto
r
r
r
r r
u × v = ( u 2 v3 − u 3v 2 ) i − ( u1v3 − u 3 v1 ) j + ( u1 v2 − u 2 v1 ) k
6
Geometría. Puntos, rectas y planos en el espacio. Problemas métricos en el espacio
Pedro Castro Ortega
12. Producto mixto de tres vectores
r r
r
Dados tres vectores u , v y w se llama producto mixto de dichos vectores al número obtenido así:
r r r
u ·( v × w )
r r r
El producto mixto se denota así ( u , v , w ).
r
r
r
Si las coordenadas de los vectores son u = ( u1 , u 2 , u 3 ) , v = ( v1 , v 2 , v3 ) y w = ( w1 , w 2 , w 3 ) , entonces el
producto mixto es el valor del determinante:
u1 u 2 u 3
r r r
( u, v, w ) = v1 v 2 v3
w1
w2
w3
13. Ángulo de dos vectores
r
r
El coseno del ángulo formado por los vectores u = ( u1 , u 2 , u 3 ) y v = ( v1 , v 2 , v3 ) vale:
r r
u1v1 + u 2 v 2 + u 3 v3
u⋅v
cos α = r r =
2
u⋅v
u1 + u 2 2 + u 32 v12 + v 2 2 + v3 2
r r
Se toma como ángulo α el menor de los formador por los vectores u y v .
13.1. Cosenos directores de un vector
r
Dado un vector u = ( u1 , u 2 , u 3 ) se llaman cosenos directores de
este vector a los cosenos de los ángulos que forma este vector con
r r r
los vectores i , j , k . Llamemos a estos ángulos, respectivamente,
r
α1 , α 2 y α3 . Entonces, como las coordenadas de i son (1, 0, 0),
r r
i ⋅u
1u1 + 0v 2 + 0v3
se tiene cos α1 = r r =
⇒
2
i ⋅u
1 + 02 + 0 2 u12 + u 2 2 + u 32
cos α1 =
cos α 3 =
u1
u12 + u 2 2 + u 3 2
u3
u12 + u 2 2 + u 3 2
r
r
v normalizado de u :
. Análogamente cos α 2 =
u3
r
u
r
k α
3
α2
r
r
i α1
j
u2
u1
u2
u12 + u 2 2 + u 3 2
. Obsérvese pues que los cosenos directores coinciden con las coordenadas del vector
u1
r 1 r
1
v= r u=
u1 , u 2 , u 3 ) =
,
(
2
2
2
2
u +u 2 +u 2
u
u1 + u 2 + u 3
2
3
1
u2
u12 + u 2 2 + u 32
,
u3
u12 + u 2 2 + u 3 2
= ( cos α1 , cos α 2 cos α 3 ) . Obsérvese también que cos2 α1 + cos2 α 2 + cos2 α3 = 1
=
14. Vector perpendicular a un plano
r
r
Un vector libre u es perpendicular a un plano π cuando u es perpendicular a
cualquier vector contenido en π.
r
Dado el plano π de ecuación Ax + By + Cz + D = 0, se tiene que u = (A, B, C)
r
son las coordenadas de un vector perpendicular al plano: u = (A, B, C) ⊥ π.
La comprobación es fácil: se toman dos puntos M ( m1 , m 2 , m3 ) y
r
u
M
π
P
P ( p1 , p 2 , p3 ) del plano π. Entonces:
r uuur
u ⋅ MP = ( A, B, C ) ⋅ ( p1 − m1 , p2 − m 2 , p3 − m3 ) = A ( p1 − m1 ) + B ( p 2 − m 2 ) + C ( p3 − m3 ) =
r uuur
r
= ( Ap1 + Bp 2 + Cp3 ) − ( Am1 + Bm 2 + Cm3 ) = −D − (− D) = 0 , pues M, P ∈ π. Como u ⋅ MP = 0 ⇒ u ⊥ π.
7
Geometría. Puntos, rectas y planos en el espacio. Problemas métricos en el espacio
Pedro Castro Ortega
15. Ángulo de dos rectas
El ángulo α formado por dos rectas r y s es el mismo que el que forman sus vectores directores. Supongamos
u1 v1 + u 2 v 2 + u 3 v3
r
r
que éstos son, respectivamente u = ( u1 , u 2 , u 3 ) y v = ( v1 , v 2 , v3 ) ⇒ cos α =
.
u12 + u 2 2 + u 3 2 v12 + v 2 2 + v32
Es posible que este valor salga positivo o negativo. En el primer caso el ángulo obtenido es agudo, y en el
segundo es obtuso. Si queremos que el ángulo sea siempre agudo, entonces escribiremos:
u1v1 + u 2 v 2 + u 3 v3
r
cos α =
r
s
2
2
2
2
2
2
u
u1 + u 2 + u 3 v1 + v 2 + v3
r
En particular, dos rectas serán perpendiculares cuando cos α = 0 , es decir, cuando
α
v
u1v1 + u 2 v 2 + u 3 v3 = 0 :
r r
r r
r ⊥ s ⇔ u ⊥ v ⇔ u · v = 0 ⇔ u1v1 + u 2 v 2 + u 3 v3 = 0
16. Ángulo de dos planos
Dados dos planos π y π', el ángulo formado por ambos es el que forman dos vectores contenidos en cada uno de
los planos respectivos que sean perpendiculares a la recta intersección de los dos planos, es decir, el ángulo de
r r
los dos planos es el formado por los vectores v y v ' de la figura.
r
r
Si u y u ' son dos vectores perpendiculares a cada uno de los planos respectivos, podemos observar que el
r r
r r
ángulo que forman u y u ' es el mismo que el de v y v ' .
r
π'
π'
u
r
r
v'
u'
α
α
r
v
π−α
π
α
r
v
π
Por lo tanto, si las ecuaciones de ambos planos son π ≡ Ax + By + Cz + D = 0 y π ' ≡ A ' x + B' y + C 'z + D ' = 0 ,
r
r
entonces los vectores u = (A, B, C) y u ' = (A', B', C') son perpendiculares a los planos respectivos, luego:
AA '+ BB'+ CC '
cos α =
(obsérvese que tomamos valor absoluto para obtener el ángulo agudo).
2
A + B2 + C 2 A ' 2 + B' 2 + C ' 2
En particular dos planos serán perpendiculares cuando cos α = 0 , es decir, cuando AA '+ BB'+ CC ' = 0 :
r r
r r
π ⊥ π' ⇔ u ⊥ u ' ⇔ u · u ' = 0 ⇔ AA '+ BB'+ CC ' = 0
17. Ángulo de recta y plano
Dada una recta r y un plano π, el ángulo formado por ambos es aquel que
forman r y r', donde r' es la proyección ortogonal de r sobre π. La recta r'
se obtiene como intersección de π con el plano que contiene a la recta r y
r
r
es perpendicular a π. Si v y v ' son vectores directores de r y r', el
r
r
r
ángulo formado por r y π es el que forman v y v '. Si u es un vector
r
perpendicular a π, ese ángulo es complementario del formado por u y
r
v . Por lo tanto, si las ecuaciones continuas de la recta son
x − a1 y − a 2 z − a 3
=
=
, y la ecuación implícita del plano es
r≡
v1
v2
v3
π
π ≡ Ax + By + Cz + D = 0 , tenemos: sen α = cos − α , luego:
2
Av1 + Bv2 + Cv3
sen α =
A 2 + B2 + C 2 v12 + v 22 + v32
r
r
u
r
v
α r
v'
r'
π
8
Geometría. Puntos, rectas y planos en el espacio. Problemas métricos en el espacio
Pedro Castro Ortega
18. Distancia entre dos puntos
Dados dos puntos A ( a1 , a 2 , a 3 ) y B ( b1 , b 2 , b3 ) en el espacio, su distancia, d(A, B), es igual al módulo del
uuur
vector AB = ( b1 − a1 , b 2 − a 2 , b3 − a 3 ) . Por lo tanto:
uuur
2
2
2
d ( A, B ) = AB = + ( b1 − a1 ) + ( b 2 − a 2 ) + ( b3 − a 3 )
19. Ecuación normal de un plano
r
Ya sabemos que dado un plano de ecuación π ≡ Ax + By + Cz + D = 0 , el vector u = (A, B, C) es perpendicular
al plano. Si además este vector es unitario (de módulo 1), decimos que la anterior ecuación es la ecuación
normal del plano. Para pasar de la forma implícita a la forma normal basta que normalicemos el vector
A
B
C
r
,
,
u = (A, B, C) dividiendo entre su módulo:
, que son
2
2
2
2
2
2
2
2
2
A +B +C
A +B +C
A +B +C
r
precisamente los cosenos directores del vector u (véase el apartado 13.1). Así pues la ecuación normal del
plano es: ( cos α1 ) x + ( cos α 2 ) y + ( cos α 3 ) z + p = 0 , donde ( cos α1 , cos α 2 , cos α 3 ) son los cosenos directores
D
de un vector perpendicular al plano y p =
(veremos en el apartado siguiente que esta cantidad
A 2 + B2 + C 2
representa en valor absoluto la distancia del origen de coordenadas al plano)
20. Distancia de un punto a un plano
Dados un punto P y un plano π, se llama distancia de P a π, d(P, π), a la distancia de P a M, donde M es el
punto de intersección de π con la recta que pasa por P y es perpendicular a π. Si el punto P tiene coordenadas
( p1 , p 2 , p3 ) y el plano π tiene ecuación implícita π ≡ Ax + By + Cz + D = 0 , la distancia de P a π vale:
d ( P, π ) =
P
Ap1 + Bp 2 + Cp3 + D
A 2 + B2 + C 2
r
u
d(P, π)
M
π
r
u
Demostración:
uuur
r
Supongamos M ( m1 , m 2 , m3 ) , MP = ( p1 − m1 , p 2 − m 2 , p3 − m3 ) y u = (A, B, C) el vector perpendicular al
uuur
r uuur
plano. Obviamente d ( P, π ) = MP . Pero, por un lado, u ⋅ MP = A ( p1 − m1 ) + B ( p 2 − m 2 ) + C ( p3 − m3 ) y, por
uuur
r uuur r uuur
r uuur
otro, u ⋅ MP = u MP cos α = A 2 + B2 + C2 MP ( ±1) (el ángulo α que forman u y MP es 0º ó 180º).
uuur
Entonces, igualando ambas expresiones: ± A 2 + B2 + C 2 MP = A ( p1 − m1 ) + B ( p 2 − m 2 ) + C ( p3 − m3 ) ⇒
uuur
A ( p1 − m1 ) + B ( p 2 − m 2 ) + C ( p3 − m 3 )
Ap + Bp 2 + Cp3 − ( Am1 + Bm 2 + Cm3 )
. Pero M ∈ π, por
⇒ MP = ±
=± 1
A 2 + B2 + C 2
A 2 + B2 + C 2
uuur
Ap + Bp 2 + Cp3 + D
lo que Am1 + Bm 2 + Cm3 + D = 0 ⇒ Am1 + Bm 2 + Cm3 = − D ⇒ MP = ± 1
y como la
A 2 + B2 + C2
uuur
Ap1 + Bp 2 + Cp3 + D
distancia es siempre un número no negativo, ⇒ MP = d(P, π) =
A 2 + B2 + C 2
9
Geometría. Puntos, rectas y planos en el espacio. Problemas métricos en el espacio
Pedro Castro Ortega
21. Distancia entre dos planos paralelos
Dados dos planos paralelos π y π', se define la distancia entre ambos,
P
d(π, π'), como la distancia de un punto cualquiera de uno de ellos al otro.
π'
Supongamos que los planos tienen ecuaciones implícitas
π ≡ Ax + By + Cz + D = 0 y π ' ≡ A ' x + B' y + C 'z + D ' = 0 . Entonces, por d(π, π')
ser paralelos, podemos simplificar una de las dos ecuaciones, por ejemplo
π
la de π', por un número adecuado y obtendremos una ecuación del tipo
π ' ≡ Ax + By + Cz + D '' = 0 . Si tomamos un punto P ( p1 , p 2 , p3 ) ∈ π', entonces la distancia entre los planos es
d ( π, π ' ) =
Ap1 + Bp 2 + Cp3 + D
A 2 + B2 + C2
(ver apartado anterior) y como P ∈ π', se cumple Ap1 + Bp 2 + Cp3 + D '' = 0 , es
decir, Ap1 + Bp 2 + Cp3 = − D '' , y queda definitivamente: d ( π, π ' ) =
D − D ''
A 2 + B2 + C2
22. Distancia de un punto a una recta
Dados un punto P y una recta r, se llama distancia de P a r, d(P, r), a la distancia de P a M, donde M es el punto
de intersección de r con el plano que pasa por P y es perpendicular a r. Si P ( p1 , p 2 , p3 ) y la recta r tiene
ecuaciones continuas r ≡
d(P, r) =
x − a1 y − a 2 z − a 3
, entonces la distancia de P a r vale:
=
=
u1
u2
u3
( p1 − a1 , p2 − a 2 , p3 − a 3 ) × ( u1 , u 2 , u 3 )
u12 + u 2 2 + u 3 2
Demostración:
r
Supongamos M ( m1 , m 2 , m3 ) , u = ( u1 , u 2 , u 3 ) el vector director de la recta y
uuur
AP el vector que une un punto cualquiera A de la recta con el punto P:
uuur
AP = ( p1 − a1 , p 2 − a 2 , p 3 − a 3 ) . Hagamos el producto vectorial de ambos
uuur r uuur r
vectores y hallemos su módulo: AP × u = AP u sen α . En la figura se
uuur
observa que la distancia buscada es d(P, r) = AP sen α , y sustituyendo en la
uuur r
r
expresión anterior tenemos AP × u = d(P, r) u , luego
uuur r
AP × u
( p1 − a1 , p 2 − a 2 , p3 − a 3 ) × ( u1 , u 2 , u 3 )
=
d(P, r) =
r
u
u12 + u 2 2 + u 3 2
A
r
α u
P
M
d(P, r)
r
23. Distancia entre una recta y un plano paralelos
Se define esta distancia como la distancia de un punto cualquiera de la recta al plano. Así si la recta tiene
x − a1 y − a 2 z − a 3
ecuaciones continuas r ≡
y el plano tiene ecuación implícita π ≡ Ax + By + Cz + D = 0 ,
=
=
u1
u2
u3
Aa1 + Ba 2 + Ca 3 + D
entonces aplicando la fórmula de la distancia de un punto a un plano tenemos: d ( r, π ) =
A 2 + B2 + C 2
24. Distancia entre dos rectas paralelas
Se define esta distancia como la distancia de un punto de cualquiera de una recta a la otra. Así, si las rectas
x − a1 y − a 2 z − a 3
x − b1 y − b 2 z − b3
tienen ecuaciones continuas: r ≡
y s≡
(obsérvese que, por ser
=
=
=
=
u1
u2
u3
u1
u2
u3
paralelas, tienen el mismo vector director), basta aplicar la fórmula de la distancia del punto ( a1 , a 2 , a 3 ) a la
segunda recta.
10
Geometría. Puntos, rectas y planos en el espacio. Problemas métricos en el espacio
Pedro Castro Ortega
25. Distancia entre dos rectas que se cruzan
Para hallar la distancia entre dos rectas r y s que se cruzan, d(r, s),
t
hay que hacer llevar a cabo una construcción considerando los
π'
M
siguientes planos:
π''
ü π: plano que pasa por s y es paralelo a r.
r
ü π': plano que pasa por s y es perpendicular a π
ü π'': plano que pasa por r y es perpendicular a π
La intersección de los planos π' y π'' es una recta t. Por la
construcción realizada esta recta es perpendicular simultáneamente
π
a r y s, y además corta a amabas rectas. Esta recta t se llama
N
perpendicular común a r y s. Se llama distancia entre las rectas
que se cruzan r y s a la distancia entre los puntos M y N en que la
perpendicular común corta a r y s: d(r, s) = d(M, N)
Si tomamos dos puntos cualesquiera de ambas rectas, que sean
s
diferentes de M y N, y hallamos la distancia entre ellos, el número
obtenido será mayor que la distancia entre M y N. Pero la distancia
entre r y s es la “mínima distancia” entre ambas.
Obsérvese que la distancia entre las rectas r y s coincide con la distancia de un punto cualquiera de r al plano π.
ü Aclaremos este caso con un par de ejemplos:
2x − y + z − 1 = 0
x − 3 y z +1
= =
1. Hallar la distancia entre las rectas r ≡
y s≡
1
2
−1
x + 2z = 0
Solución:
Hallemos el plano π que pasa por s y es paralelo a r. Para ello escribamos la ecuación del haz de planos de
arista s: λ(2x − y + z − 1) + µ(x + 2z) = 0 ⇔ (2λ + µ)x − λy + (λ + 2µ)z − λ = 0. Para que un plano de este
haz sea paralelo a la recta r se debe cumplir que el vector perpendicular al plano (2λ + µ, −λ, λ + 2µ) sea
perpendicular al vector director de r: (1, 2, −1), es decir, que el producto escalar de ambos sea cero:
(2λ + µ)·1 + (−λ)·2 + (λ + 2µ)·(−1) = 0 ⇒ −λ − µ = 0. Para que esta última igualdad se cumpla basta elegir
λ = 1, µ = −1, luego el plano π es x − y − z − 1 = 0. La distancia buscada coincide por tanto con la distancia
1 ⋅ 3 + (−1) ⋅ 0 + (−1) ⋅ (−1) + (−1)
3
del punto P(3, 0, −1) de r al plano π: d ( r, s ) = d ( P, π ) =
=
= 3
3
12 + (−1) 2 + (−1)2
2. Hallar la perpendicular común a las rectas r y s del ejemplo anterior.
Solución:
Ya hemos hallado el plano π ≡ x − y − z − 1 = 0.
Hallemos el plano π'. Ya sabemos por el ejercicio anterior que el haz de planos de arista s es
(2λ + µ)x − λy + (λ + 2µ)z − λ = 0. Para que un plano de este haz sea perpendicular a π se debe cumplir
que los vectores perpendiculares a ambos planos sean perpendiculares, es decir:
(2λ + µ)·1 + (−λ)·(−1) + (λ + 2µ)·(−1) = 0 ⇒ 2λ − µ = 0.
Para que esta igualdad se cumpla basta elegir, por ejemplo, λ = 1, µ = 2. Entonces el plano π' es:
4x − y + 5z − 1 = 0.
2x − 6 = y
2x − y − 6 = 0
Hallemos el plano π''. Las ecuaciones implícitas de la recta r son:
⇒ el
⇒
− y = 2z + 2 y + 2z + 2 = 0
haz de planos de arista r es λ(2x − y − 6) +µ(y + 2z + 2) = 0 ⇔ 2λx + (−λ + µ)y + 2µz + (−6λ + 2µ) = 0
Para que un plano de este haz sea perpendicular a π se debe cumplir (de manera semejante al punto
anterior): 2λ·1 + (−λ + µ)·(−1) + 2µ·(−1) = 0 ⇒ 3λ − 3µ = 0.
Para que esta igualdad se cumpla basta elegir, por ejemplo, λ = 1, µ = 1. Por tanto el plano π'' es:
2x + 2z − 4 = 0, es decir, x + z − 2 = 0
La recta t (perpendicular común a r y s) es la intersección de π' y π'', luego tiene ecuaciones implícitas:
4x − y + 5z − 1 = 0
x + z − 2 = 0
11
Geometría. Puntos, rectas y planos en el espacio. Problemas métricos en el espacio
Pedro Castro Ortega
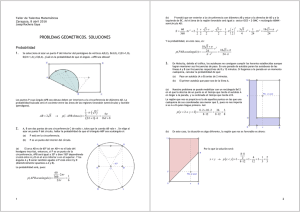
26. Área de un triángulo
Dados tres puntos del espacio A ( a1 , a 2 , a 3 ) , B ( b1 , b 2 , b3 ) y C ( c1 , c 2 , c3 ) , llamemos S al área del triángulo
r
r
r
i
j
k
r
r uuur uuur
cuyos vértices son A, B, C y u al vector u = AB × AC = b1 − a1 b 2 − a 2 b3 − a 3 . Entonces:
c1 − a1 c 2 − a 2 c3 − a 3
S=
1 uuur uuur
AB × AC
2
C
Demostración:
El área del triángulo ABC vale:
1
1
1 uuur uuur
1 uuur uuur
⋅ AB ⋅ CH = ⋅ AB ⋅ AC ⋅ sen α = ⋅ AB ⋅ AC ⋅ sen α = AB × AC
2
2
2
2
α
A
B
H
27. Área de un paralelogramo
Dado un paralelogramo ABCD en el espacio, supongamos que las coordenadas de tres vértices son
A ( a1 , a 2 , a 3 ) , B ( b1 , b 2 , b3 ) y C ( c1 , c 2 , c3 ) . Llamemos, al igual que en el apartado anterior, S al área del
r
r
r
i
j
k
D
r uuur uuur
C
paralelogramo y u = AB × AC = b1 − a1 b 2 − a 2 b3 − a 3 .
c1 − a1
Entonces:
c2 − a 2
c3 − a 3
A
uuur uuur
S = AB × AC
B
Demostración:
Un paralelogramo se puede descomponer en dos triángulos iguales trazando la diagonal. Basta con aplicar la
fórmula del área del triángulo del apartado anterior.
28. Volumen de un tetraedro
Sean A ( a1 , a 2 , a 3 ) , B ( b1 , b 2 , b3 ) , C ( c1 , c 2 , c3 ) y D ( d1 , d 2 , d 3 ) cuatro puntos del espacio. Al unirlos entre sí
de todas las maneras posibles, determinan un tetraedro cuyo volumen V es igual a la sexta parte del valor
b1 − a1 b 2 − a 2 b3 − a 3
uuur uuur uuur
1
c1 − a1 c 2 − a 2 c3 − a 3
absoluto del producto mixto AB, AC AD , es decir V =
6
d1 − a1 d 2 − a 2 d 3 − a 3
(
)
Demostración:
El volumen del tetraedro es la tercera parte del área de la base por la altura ⇒ V =
=
1
( Área ACD ) ⋅ h =
3
1
1
π
1 uuur uuur uuur
π
Área ACD ) ⋅ AB ⋅ sen α = ( Área ACD ) ⋅ AB ⋅ cos − α = AC × AD ⋅ AB cos − α =
(
3
3
2
6
2
b1 − a1 b 2 − a 2
1 uuur uuur uuur 1 uuur uuur uuur 1
= AB ⋅ AC × AD = AB, AC AD = c1 − a1 c2 − a 2
6
6
6
d1 − a 1 d 2 − a 2
(
) (
)
b3 − a 3
c3 − a 3
d3 − a 3
B
uuur uuur
AC × AD
Según el orden en que tomemos los vectores ese determinante puede salir
positivo o negativo. Por lo tanto, para que el volumen sea positivo, en la
fórmula pondremos el valor absoluto del determinante.
D
α
A
h
C
12
Geometría. Puntos, rectas y planos en el espacio. Problemas métricos en el espacio
Pedro Castro Ortega
29. Volumen de un paralelepípedo
Un paralelepípedo es un prisma cuyas bases son paralelogramos. El volumen
de un paralelepípedo es igual al área de la base multiplicada por la altura.
Podemos tomar como base cualquiera de las carras, y en este caso la altura
será la distancia existente entre los planos que contienen a dos bases opuestas.
Dados cuatro puntos del espacio A ( a1 , a 2 , a 3 ) , B ( b1 , b 2 , b3 ) , C ( c1 , c 2 , c3 )
y D ( d1 , d 2 , d 3 ) , podemos realizar la construcción de la figura para obtener un
paralelepípedo. Su volumen V es el valor absoluto del producto mixto
b1 − a1 b 2 − a 2 b3 − a 3
uuur uuur uuur
AB, AC AD , es decir: V = c1 − a1 c 2 − a 2 c3 − a 3
(
)
d1 − a1 d 2 − a 2
d3 − a 3
H
G
B
F
D
A
E
C
Demostración:
El paralelepípedo ABCEDHBFG puede descomponerse en dos prismas triangulares ACDHBF y CEDHFG, los
cuales tienen el mismo volumen, por tener la misma base y la misma altura. Además, el prisma ACDHBF tiene
la misma base y la misma altura que el tetraedro ACDB, luego su volumen es tres veces mayor. Por lo tanto el
volumen del paralelepípedo es seis veces mayor que el volumen del tetraedro ACDB. Basta aplicar la fórmula
del volumen del tetraedro.
13