Análisis de pasividad y estabilidad de un circuito detector - UAM-I
Anuncio

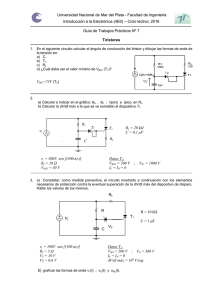
Análisis de pasividad y estabilidad de un circuito detector de envolvente mediante el enfoque en variable de estado 1 Manuel González S.1 , S. A. Rodrı́guez1 J. L. Vázquez González 2 División Académica de Ingenieria y Arquitectura de la UJAT, Tabasco, México. 2 Depto. Ingenierı́a en Electrónica, Universidad de las Américas–Puebla. [email protected] capacitor, con una resistencia y haciendo una conección serial con un diodo. Una gran cantidad de análisis algebraico ha sido hecho, por ejemplo ver [3] y [6]. Sin embargo, a nuestro conocimiento no existe un análisis de estabilidad de este sistema. La propiedad de estabilidad es importante por que permite estudiar el desempeño del sistema. Por ejemplo, [1], presenta el desempeño de un filtro lineal dentro de un ancho de banda establecido, que garantiza la estabilidad del filtro cuando se tiene incertidumbre en algunos de sus componentes. Recibido: 15 de diciembre de 2006. Aceptado: 29 de junio de 2007. Resumen En este artı́culo se analiza la pasividad y la estabilidad de un circuito detector de envolvente no lineal. A partir de las ecuaciones diferenciales que describen la dinámica de este circuito, se hace el desarrollo en té rminos de variables de estado. Ası́ se relacionan de manera directa la Pasividad y las funciones de Lyapunov, para estudiar la estabilidad de este circuito. El trabajo teórico es validado por simulación en MatLab-Simulink y Multisim. En este trabajo, se garantiza la estabilidad de un circuito nolineal detector de envolvente para un ı́ndice de modulación dado. Introducción Uno de los métodos más populares utilzado en la transmisión de se ñales de audio y video es la modulación de amplitud. Este método consiste en una señal de baja fracuencia que controla la amplitud de una señal de alta frecuencia, llamada portadora (carrier en ingles). Modelación Matemática En esta sección es analizada la dinámica del circuito detector de envolvente presentado en la figura 1. La modulación en amplitud implica que se tienen cientos de picos de la señal portadora por cada ciclo de una modulación. Por lo cual se tiene una señal envolvente superior, construida con el pico positivo y una envolvente inferior construida con el pico negativo de la señal portadora, respectivamente. La mayorı́a de los receptores AM utilizan detector de envolvente implementado con circuitos simples que codifican con buena fidelidad relativa la envolvente de la señal modulada. Figura 1. Circuito Detector de Envolvente Este circuito electrónico puede ser representado por un sistema dinámico con la ayuda de las Leyes de Kirchhoff. Por un lado la aplicación de la ley de corriente de Kirchhoff en el nodo 2 se obtiene La clásica topologı́a del circuito detector de envolvente es mostrado en la figura 1. Como se puede ver, el circuito es construido a traves del paralelo de un 40 Análisis de pasividad y estabilidad. . . M. González S., S. A. Rodrı́guez y J. L. Vázquez. iC = iD − iR , (1) donde iD ,iC e iR son las corrientes a traves del diodo, del capacitor y de la resistencia, respectivamente. Por otro lado, la aplicación de la ley de voltaje de Kirchhoff en la primera malla resulta: vD = vi − vC , (2) donde vi ,vD y vC son los voltajes en la fuente, en el diodo y capacitor, respectivamente. Estas dos ecuaciones son relacionadas como sigue. De (1) 1 vC , (3) R con iD = iD (vD ) la función del voltaje aplicado en las terminales del diodo y que describe el modelo matemático para el diodo no lineal [6]: iC = iD − iD (vD ) = Io (exp(qvD /mkT ) − 1) (4) Donde Io es la corriente de saturación inversa en amperes [A] , q que es la carga del electrón, 1.6 × 10−19 [C] , m es una constante empirica, k es la constante de Boltzmann igual a 1.38 × 10−23 [J/K] y T es la temperatura en grados kelvin [K] . Ahora, si se considera (3) y el modelo lineal del capacitor dvC = C v̇C , iC = C dt se tiene 1 C v̇C = iD (vD ) − vC . R Ahora, despues de sustituir (2) en iD se obtiene 1 1 vC , v̇C = iD (vi − vC ) − C RC (5) o con la igualdad de (4) entonces: v̇C = Io qvi qvC 1 [exp( ) exp(− ) − 1] − vC . (6) C mkT mkT RC Teniendo como la variable de estado la tensión del capacitor x = vC y el voltaje de entrada u = vi como la variable de control, por lo que resulta el siguiente modelo en variable de estado: 1 1 ẋ = iD (u − x) − x, C RC (7) Donde iD (·) es la función no lineal definida en (4). En la siguiente sección es descrito el circuito detector envolvente. 41 El circuito detector de envolvente En esta sección es descrita la estructura básica del circuito detector de envolvente. Simplificaciones de (6) nos permiten entender la dinámica de los circuitos y obtener un criterio simple para el diseño. Posteriormente para la siguiente sección se realiza un estudio riguroso de la estabilidad para el modelo no lineal (6). La función principal del detector de envolvente es recobrar la señal envolvente ve (t) de la señal de amplitud modulada vi , mediante el seguimiento de su lenta variación y el filtrado de las variaciónes rápidas de la alta frecuencia de la señal portadora. Este proceso está relacionado con la demodulación, ya que las variaciones de la señal envolvente son de hecho la señal modulante. Recuerde que el proceso de modulación de amplitud es obtenida cuando la señal sinosoidal de la portadora de frecuencia angular wc es controlada en amplitud por la señal modulante vm . Esta señal es descrita por la ecuación vm (t) = ma cos wm t, t ≥ 0, (8) donde ma es el factor modulante y wm la onda de frecuencia modulante. Esto produce una señal de salida dada por [3] vi (t) = vim [1 + vm (t)] cos wc t. (9) Por sustitución de (8) en la expresión anterior, se tiene vi (t) = ve (t) cos wc t (10) donde ve (t) = vim [1 + ma cos wm t] es la señal envolvente y wc = 2πfc es mucho más grande que wm (wc ≫ wm ). En el proceso de detección, la variación en el voltaje del capacitor (vC ) debe seguir la máxima variación de la señal envolvente en el intervalo de tiempo (T = 1/fc ) necesario para completar un periodo la señal portadora. El porcentaje del voltaje envolvente puede ser expresado por la derivada de tiempo de (11), d ve (t) = −vim (ma wm ) sen wm t dt (11) la cual tiene su máximo valor cuando| sen wm t |= 1, a wm t = π2 y vm (t) = 0. por lo tanto: máx | d ve (t) |= ma wm vim . dt 42 ContactoS 65, 40–45 (2007) Para obtener el máximo valor de la envolvente a traves de un periodo de la portadora (T = 1/fc ) se puede asumir que d ∆ve ve (t) = . dt ∆t (12) Si ∆t = T, la expresión (12) se trasforma ∆ve = ma wm T vim . (13) Ya que wc es muy grande con respecto a wm (por ejemplo, wc > 100wm ), el diodo esta en corte (iD = 0) en los picos de la portadora. Si esto sucede en t = 0, entonces de (6) el detector de salida es la solución de v̇ = − 1 vC , vC (0) = vim , t ≥ 0. RC Esta es una disminución exponencial dada por vC (t) = vim e−t/RC . Para tener una alta fidelidad de demodulación de una onda de amplitud modulada, esta es sintonizada mediante la constante de tiempo RC. Entonces el valor de la constante de tiempo tiene que seguir la lenta variación de la señal envolvente (la señal modulante). Esto significa que la constante de tiempo del circuito RC es un compromiso entre la lenta variación de la señal modulante y el filtrado de las rápidas variaciones en las altas frecuencias de la señal portadora. Si éste compromiso se verifica, entonces se asegura la mı́nima distorsión de la señal demodulada. Después que ha pasado un ciclo de la portadora (tiempo T ) el diodo es de nuevo polarizado directamente, vC = vim y el proceso se repite con una nueva variación en vC , que puede ser expresada como ∆vC = vim − vim e−T /RC . Si se utiliza la aproximación: e−x ≃ 1 − x, lo cual es válido cuando (x ≪ 1) se tiene la siguiente expresión ∆vC ≃ vim T . RC (14) Luego lo que se requiere es igualar las variaciones de la señal de salida con las variaciones de la envolvente en un ciclo de la portadora. La condición matemática para que suceda es la igualdad entre (13) y (14). De este modo se obtiene el ajuste de la constante de tiempo RC, con la siguiente expresión 1 , wm = 2πfm . RC = ma wm (15) Para valores altos de RC, el capacitor se descargará muy lentamente y la salida del circuito detector, vC , no seguirá la envolvente. Si RC es demaciado pequeña, lo que se tiene es una señal excesivamente deformada. De este modo, se concluye que la constante de tiempo RC debe seguir la envolvente requerida. Para obtener esta condición usualmente, es seleccionada la frecuencia más alta de modulación. La siguiente sección es dedicada al análisis de la estabilidad y pasividad del modelo detector envolvente (7). Enfoque de pasividad y estabilidad En esta sección son presentados los preliminares matemáticos para estudiar la estabilidad en sistemas no lineales. Este estudio es ejecutado via el análisis de pasividad. Este enfoque es un camino para estudiar estabilidad, que está relacionada con conceptos fı́sicos como energı́a y potencia disipada en circuitos. El siguiente ejemplo de circuito RLC motiva la definición, lo cual sigue el ejemplo [2]. Figura 2. Circuito RLC. Considere el circuito RLC mostrado en la figura 2. Es un circuito con una fuente de voltaje conectada a una red pasiva RLC. Se toma el voltaje u como la variable de entrada del sistema y la corriente y como la variable de salida. El producto uy es el flujo de potencia dentro de la red y la energı́a almacenada en el sistemas está dada por V (t) = 12 Li2 + 12 Cv 2 . Ya que la red es positiva, la energı́a absorbida por la red sobre un periodo de tiempo [0, t] debe ser igual o mayor que la almacenada en la red sobre el mismo periodo; esto es, Z t u(s)y(s)ds ≥ V (t) − V (0) . (16) o Si en (16) se tiene una desigualdad estricta, entonces la diferencia entre la energı́a entrante y el incremento en la energı́a almacenada debe ser la energı́a disipada Análisis de pasividad y estabilidad. . . M. González S., S. A. Rodrı́guez y J. L. Vázquez. en los componentes resistivos de la red. Ya que (16) debe influir para cada t ≥ 0, esto debe de ser cierto para la desigualdad de la potencia instantánea u (t) y (t) ≥ V̇ (t) (17) válido para todo t; esto es, el flujo de potencia dentro de la red debe ser más grande o igual que la razón de cambio de la almacenada en la red. Ahora, considere el sistema ẋ = f (x, u) (18) y = h(x, u), (19) donde f : Rn × Rm −→ Rn es localmente, Lipschitz [2]; h : Rn × Rm −→ Rn es continua, f (0, 0) = 0, y h(0, 0) = 0. El sistema tiene el mismo número de entradas que de salidas. Definición 1 . El sistema (18)-(19) es pasivo si existe una función continuamente diferenciable y semidefinida positiva V (x) (llamada función de almacenamiento) tal que uT y ≥ ∂V ∂x f (x, u) + ǫuT u + δy T y + ρψ(x), para toda (x, u) ∈ Rn × Rm (20) donde ǫ,δ y ρ son constantes no negativas, y ψ(x) es una función semidefinida positiva de x tal que ψ(x(t)) ≡ 0 =⇒ x(t) ≡ 0 (21) para todas las soluciones de (18) y cualquier u(t) para el cual la solución existe. El término ρψ(x) se denomina porcentaje de disipación en el estado. Más aún, el sistema se dice: i) conservativo si (20) se satisface con la igualdad y con ǫ = δ = ρ = 0; esto es, uT y = ∂V f (x, u) ∂x ii) pasivo estricto de entrada si ǫ > 0; iii) pasivo estricto de salida si δ > 0; iv) pasivo estricto de estado si ρ > 0. Los nombres se combinan cuando hay más de una constante positiva. Por ejemplo, si ambas ǫ y δ son positiva, se dice que la entrada y salida del sistema es estrictamente pasivo. 43 En el caso de pasividad estricta de salida, estaremos interesados en la propiedad adicional que y(t) ≡ 0 =⇒ x(t) ≡ 0 (22) para toda solución de (18) cuando u = 0. En forma equivalente, ninguna solucion de ẋ = f (x, 0) pueden estar identicamente en S = {x ∈ Rn : h(x, 0)}, que no sea la solución trivial x(t) ≡ 0. Es importante notar que la diferencia entre (22) y la condición (21) impuesta sobre el porcentaje de disipación en el estado. La condición (21) se debe verificar para cualquier u, mientras (22) sólo se debe satisfacer para u = 0. El siguiente teorema relaciona pasividad de algunas de las nociones de estabilidad que se conocen. Teorema 1 .[2] Considerando el sistema (18)-(19). i) Si el sistema es pasivo con una función de almacenamiento V (x) definida positiva, entonces el origen de ẋ = f (x, 0) es estable. ii) Si el sistema es estrictamente pasivo en la salida, entonces es £2 estable con ganancia finita. iii) Si el sistema es estricamente pasivo en la salida con una función de almacenamiento V (x) definida positiva, y observable al estado cero, entonces el origen de ẋ = f (x, 0) es asintóticamente estable. iv) Si el sistema es pasivo estricto de estado con una función de almacenamiento V (x) definida positiva, entonces el origen de ẋ = f (x, 0) es asintóticamente estable. Si en alguno de los últimos dos casos V (x) es radialmente no acotada, el origen es globalmente asintóticamente estable. Pasividad del detector de envolvente Aquı́ es estudiado la estabilidad para el modelo no lineal (6) estructurado en el espacio de estado (7). El teorema (1) es aplicado aquı́ para analizar el circuito detector de envolvente mostrado en la figura 1. La energı́a almacenada en el circuito es v (x) = 1 2 cv 2 C por lo tanto v̇(x) = cvc v̇c = cxẋ por sustitución de (7) y (2) en esta ecuación se tiene La desigualdad (20) se denomina desigualdad de disipación. v̇(x) = − 1 2 x + uiD (u − x) − vD iD (u − x) R 44 ContactoS 65, 40–45 (2007) y después de algunas manipulaciones uy = v̇ + 1 2 x + vD iD , R si y = iD = iD (u − x) = iD (vD ) . Figura 4. Modelo del detector de envolvente en Simulink’s Figura 3. Curva caracterı́stica del diodo. De la figura 3, es fácil de verificar la siguiente desigualdad vD iD ≥ 0. Por lo tanto, se concluye que el sistema (7) satisface la definición 1 de pasividad con respecto al estado, i.e. 1 uy ≥ v̇ + x2 R De acuerdo a la ecuación 20, ρ = R1 , ψ(x) = x2 . Si se observa el circuito en la figura 1, es claro que: u ≥ 0⇒y≥0 u ≤ 0⇒y≤0 Por lo tanto el flujo de potencia dentro del circuito de la figura 1 es no negativo. Este hecho implica que v̇ no es positivo, i.e. v̇ ≤ 0, ∀ (u, y) . Por lo que la desigualdad anterior, permite verificar el teorema de Lyapunov (método directo de Lyapunov [2]) para el sistema (7) y entonces el origen del sistema es estable. Ya que esta condición no depende del valor de entrada, entonces, para cualquier entrada acotada hay una salida acotada y el sistema (7) es L∞ estable [2]. Simulación A continuación, el modelo en el espacio de estado es implementado en el ambiente Matlab-Simulink [8], [7]. El diagrama de representación es mostrado en la figura 4. Figura 5. Forma de onda de entrada del circuito detector de envolvente en Simulink En la figura 5, es presentada la entrada de AM. En la figura 6, pág. 45 es mostrada la salida, aquı́ el detector de envolvente recupera la señal envolvente (information) ve (t). Esta sigue la lenta variación de la envolvente y elimina la rápida variación de la alta frecuencia de la portadora wc . Ahora el mismo circuito detector de envolvente es simulado en Multisim, como se muestra en la figura 7, pág. 45, donde los resultados verifican perfectamente la simulación anterior en Matlab-Simulink. Estos resultados en Multisim se muestran en las figuras 8 y 9, pág. 45. Esta concordancia valida la modelación en variable de estado. Análisis de pasividad y estabilidad. . . M. González S., S. A. Rodrı́guez y J. L. Vázquez. Figura 6. Forma de onda de salida de la simulación en Simulink. Figura 7. Diagrama del circuito detector de envolvente implementado en Multisim. Conclusiones En este artı́culo se estudia la estabilidad de un circuito no lineal detector de envolvente. El análisis presentado modela al circuito por medio de variables de estado y es una aplicación de teorı́a del control. Este enfoque permite hacer un estudio riguroso de la estabilidad y de la pasividad, las cuales son propiedades que se relacionan entre sı́. Los métodos tradicionales estudian propiedades locales por medio de la linealización de circuitos no lineales al rededor de un punto de operación. Aqui se presenta un análisis más fino al considerar el modelo completo del circuito incluyendo no linealidades. Los resultados obtenidos fueron simulados en ambiente Matlab-Simulink y Multisim. Los resultados son similares e ilustran gráficamente la estabilidad y la pasividad del circuito detector de envolvente. Bibliografı́a 1. Barmish (1994) Barmish B. R. (1994) New Tools for Robusness of Linear Systems, Macmillan Publishing Company. 45 Figura 8. Forma de onda de entrada del circuito detector de envolvente implementado en Multisim. Figura 9. Forma de onda de salida del circuito detector de envolvente de la simulación en Multisim. 2. Khalil (2002) Khalil H. (2002) Nonlinear Systems, Prentice Hall. 3. Krauss (1984) Krauss Herbert L. Bostian W. (1984) Estado Sólido en Ingenierı́a de Radiocomunicación, Limusa. 4. Rodriguez (1999) Rodriguez Paredes Salvador Antonio (1999) Análisis Estructural de un Modelo de Helicóptero. Cinvestav-IPN México. 5. Savant (1992) Savant. Roden. Carpenter. (1992) Diseño Electrónico Circuitos y Sistemas, Addison-Wesley Iberoamericana. 6. Schilling (1993) Schilling L. y Belove Ch. (1993) Circuitos Electronicos Discretos e Integrados, Mc GrawHill. 7. Steven cuatro (2005) Karris S. T. (2005) Electronic Devices and Amplifier Circuits with Matlab Applications, Orchard Publications Second Edition. 8. Steven (2003) Karris S. T. (2003) Introduction to Simulink with Engineering Aplications, Orchard Publicatis Second Edition. cs