Control de Procesos Industriales
8. Control Anticipativo
por
Pascual Campoy
Universidad Politécnica Madrid
Control Anticipativo
•
•
•
•
•
•
Motivación
Concepto y estructura
Cálculo del controlador
Ejemplo y ejercicio
Control de proporción
Ejemplo y ejercicio
U.P.M.-DISAM
P. Campoy
Control de Procesos Industriales
2
1
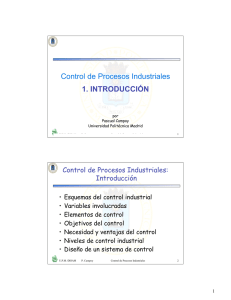
Motivación
Intercambiador con vapor a condensación:
PV Te
AY
PV
TT
V Σ
Te
+
+
V
TC
T
F
T
Intercambiador
TT
Tem(s)
GCA(s)
1
Te(s)
e-3s
1+5s
yref(t)
+
-
U.P.M.-DISAM
+
GC(s)
P. Campoy
+
0,2
V(s)
+
1+20s
+
Control de Procesos Industriales
T(s)
3
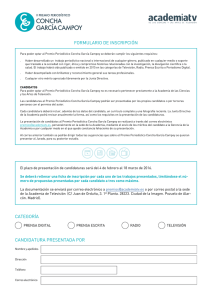
Concepto y estructura
• Concepto: medir las perturbaciones y actuar sobre
la entrada para corregir el efecto de aquellas
GCA(s)
yref(t)
dm(t)
d(t)
GS(s)
GD(s)
+
-
GC(s)
+
+
GP(s)
+
+
y(t)
El control anticipativo es un control en bucle abierto, por lo que
debe utilizarse siempre junto con un control por realimentación
de la salida (C.R.B.), para mejorar las características de éste.
U.P.M.-DISAM
P. Campoy
Control de Procesos Industriales
4
2
Cálculo del controlador …
• Objetivo: anular o minimizar el efecto de la
perturbación d(t)
GCA(s)
dm(t)
para anular el efecto de d(t):
d(t)
GS(s)
GD(s)
+
+
GP(s)
U.P.M.-DISAM
P. Campoy
+
+
y(t)
Control de Procesos Industriales
5
… cálculo del controlador
La f.d.t. teórica del C.A. que anula el efecto de la
perturbación no siempre es realizable:
1. El tm de GCA(s) no es realizable cuando tmd<(tmp+tms):
el efecto de d(t) no se anula, pero es
tanto menor cuanto tmd-(tmp+tms)0
2. Cuando nº ceros (GCA(s)) > nº polos (GCA(s)):
el efecto de d(t) no se anula, pero es
tanto menor cuanto más parecida sean
las dinámicas de GP(s)GS(s)) y GD(s)
U.P.M.-DISAM
P. Campoy
Control de Procesos Industriales
6
3
Ejemplo 8.1 …
a) Diseñar y calcular un control anticipativo que minimice el efecto de Te
b) Comparar los resultados respecto al C.R.B. ante cambios en la
referencia Tref y ante cambios en la perturbación Te (sin y con error en
el modelado)
AY
PV
TT
V Σ
Te
+
+
T
- (1+20s) e-3s Tem(s)
TC
0,2(1+5s)
1
Te(s)
TT
e-3s
1+5s
yref(t)
+
GC(s)
-
+
+
V(s)
0,2
1+20s
+
+
T(s)
Kc=1/0.2=5; Ti=20
U.P.M.-DISAM
P. Campoy
Control de Procesos Industriales
7
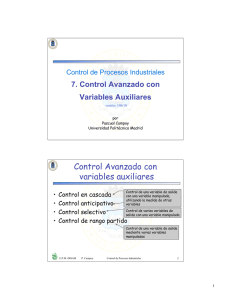
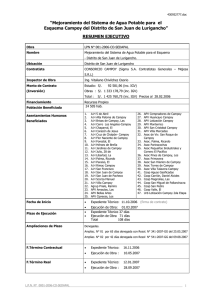
… ejemplo 8.1
b)
T ante cambio en Tref
T ante cambio en Te
sin error de modelo
U.P.M.-DISAM
P. Campoy
T ante cambio en Te
error de modelo de 10%
en todos los parámetros
Control de Procesos Industriales
8
4
Ejercicio 8.1
En el esquema de control en cascada de la figura se desea minimizar el
efecto de las variaciones en la concentración de entrada CAe
AT
CAe(s)
CA
AC CAref
e
0,9 -10s
1+24s
Fe CAe Te
FT
FC
Fr
TT
TC
Tref
Tref(s)
e
-1,5 -12s
1+30s
+
+
CA(s)
Fe Te Pc
a)
b)
c)
d)
e)
Diseñar en esquema de control usando la terminología ISA
Diseñar en Simulink el sistema de control anterior (2.5 puntos)
Calcular todos los bloques del anterior sistema de control (2.5 puntos)
Calcular el bloque de C.A. proporcional (sin dinámica) (2.5 puntos)
Comparar en un gráfico la evolución de CA sin usar el C.A, usando un
U.P.M.-DISAM
P. Campoy
Control
de Procesos
Industriales (2.5 puntos)
9
C.A.
con dinámica
y usando un
C.A.
proporcional
Control Anticipativo
•
•
•
•
•
•
Motivación
Concepto y estructura
Cálculo del controlador
Ejemplo y ejercicio
Control de proporción
Ejemplo y ejercicio
U.P.M.-DISAM
P. Campoy
Control de Procesos Industriales
11
5
Control anticipativo de proporción:
concepto y estructura
• Objetivo: controlar la proporción de dos flujos
Estructura 1:
Estructura 2:
relación deseada
FT
F1
X
F1
FT
relación
deseada
FC
FC
F2
FT
U.P.M.-DISAM
÷
FT
F2
P. Campoy
AY
Control de Procesos Industriales
12
Ejemplo control proporción:
control de altura de calderín
• Esquema funcionamiento calderín
vapor a
turbina
FT
Href
LT
agua a pared
de agua
U.P.M.-DISAM
P. Campoy
LC
AY Σ
FC
mezcla
líquido-vapor
FT
agua de
alimentación
Control de Procesos Industriales
13
6
Sistema mezclador
Para el mezclador de temperaturas de la figura, se tiene:
F1 T1
ecuaciones estáticas:
F2 T2
F = F1 + F2 #
"
TF = T1 F1 + T2 F2 !
punto de equilibrio:
T10 = 20; F10 = 10; T20 = 80; F20 = 2
" F0 = 12; T0 = 30
ecuaciones estáticas linealizadas:
FT
#
F = F1 + F2
%
T10 " T0
T "T
F
F
F1 + !20 0 F2 + 10 T1 + 20 T2 $
F0
F0
F0
F0 %&
#
F = F1 + F2
$
T = "0.833 F1 + 4.16 F2 + 0.833T1 + 1.66T2 %
T=
!
identificando se obtienen las ecuaciones dinámicas:
"
1
1 %'
!
"F(s)% $
3s
+
1
3s
+ 1 '" F1 (s)%
$
'=$
$
'
#T(s)& $ (0.8333 e(3s 4.166 e(3s '#F2 (s)&
$# 10s + 1
10s + 1 '&
U.P.M.-DISAM
P. Campoy
Control de Procesos Industriales
14
!
Ejercicio 8.2
En el sistema de la figura F1 es una variable de perturbación,
siendo F2 la única variable manipulada:
F1 T1
"
1
"F(s)% $
3s + 1
$
'=$
#T(s)& $ (0.8333 e(3s
$# 10s + 1
F2 T2
1 %'
3s + 1 '" F1 (s)%
$
'
4.166 e(3s '#F2 (s)&
10s + 1 '&
FT
a)
b)
c)
d)
Diseñar una estructura
de control de T que incluya un control de
!
proporción (observar qué bloques usan valores incrementales) (2.5 puntos)
Calcular todos las f.d.t. de la estructura de control anterior (2.5 puntos)
Comparar en un mismo gráfico la evolución de T con la obtenida
mediante un C.R.B., en el caso de que F1 pase a valer 11. (2.5 puntos)
Comparar en un mismo gráfico la evolución de T con la obtenida
mediante un C.R.B., cuando la Tref pasa a ser de 31º (2.5 puntos)
U.P.M.-DISAM
P. Campoy
Control de Procesos Industriales
15
7
 0
0