diseño y construcciòn de tablero electrónico basado en led`s
Anuncio
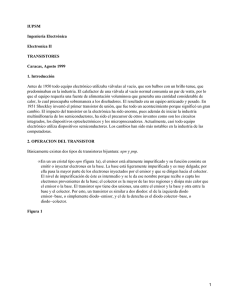
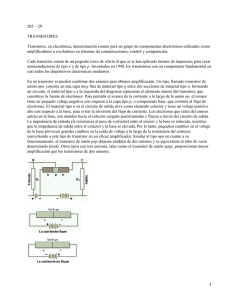
UTEQ Firmado digitalmente por UTEQ Nombre de reconocimiento (DN): cn=UTEQ, o=UTEQ, ou=UTEQ, [email protected], c=MX Fecha: 2014.09.23 11:46:16 -05'00' UNIVERSIDAD TECNOLÓGICA DEL ESTADO DE QUERÉTARO Nombre del proyecto: “DISEÑO Y CONSTRUCCIÒN DE TABLERO ELECTRÓNICO BASADO EN LED’S” Empresa: CENTRO DE INVESTIGACIÓN DE CIENCIA APLICADA Y TECNOLOGIA AVANZADA CICATA-IPN QUERÉTARO. Memoria que parte de los requisitos para obtener el título de: TÉCNICO SUPERIOR UNIVERSITARIO EN MECATRÓNICA ÁREA AUTOMATIZACIÓN Presenta: ESTRADA ALANIS JOSÈ LUIS. Asesor de la UTEQ Asesor de la organización M. en T.A. Gustavo Ortiz González. Dr. Juan Bautista Hurtado Ramos. Santiago de Querétaro, Qro. Septiembre de 2014 RESUMEN El tablero electrónico se diseñó de manera que pudiera dar información numérica relevante a varios eventos que ocurrieran en el CICATA y que fuera necesario dar a conocer a la población de este, de una manera sencilla, por medio del uso de microcontroladores se genera el muestreo de la información deseada, que en este caso solo es un cronometro, en el cual se puede controlar el inicio, detención y el reinicio de su conteo, con una característica de que este tablero cuenta con tres perrillas, que son las encargadas de cambiar el color de muestreo, esto quiere decir que tus datos pueden ser visibles en color rojo, amarillo, violeta, azul, cualquier color que se desee, dando una mejor vista y que llama la atención, ya que también este cambio en el color puede ser programado para que ocurra de manera aleatoria o vinculado al valor del cronómetro. En este proyecto se realizo en colaboración con un compañero de la UTEQ, por lo que este documento es complemento informático y mi punto de vista del prototipo mencionado anteriormente. Durante el tiempo de realización del proyecto de estadía, solo se logro concluir con la parte del diseño del prototipo, que fue lo acordado con el asesor del CICATA.la parte de construcción de quedo solo en la etapa de inicio, solo se logro la construcción de la estructura, panel de capsulas de reflectivas, clemas de conexión para los 225 led’s y escritura del código de programación. ( palabras clave: introducción, explicación, proyecto) 2 DESCRIPTION In my opinion CICATA is a good work place, because it has the facilities for your job, like a students and practitioners zone whit cubicles where you have a place for yourself. There are workshop whit tool in good conditions and there’s a good environment of respect among everybody. I worked whit Dr. Juan Bautista Hurtado Ramos he is medium-height and chubby, his hair is black and short, he has dark skin and his eyes are brown. He is young, intelligent, friendly, talented and patient. 3 DEDICATORIAS Este trabajo está dedicado a todas aquellas personas que en un determinado momento han sido el impulso para mi formación profesional y personal, con todo mi cariño les dedico éste nuevo triunfo en mi vida. A toda mi familia especialmente a mis padres y hermanos que estuvieron conmigo en cada momento con su apoyo incondicional y constante que con sus palabras de aliento y con su esfuerzo me impulsaron para alcanzar un logro más en la vida. 4 AGRADECIMIENTOS A los profesores que me brindaron su conocimiento incondicional, que me impulsaron en este trayecto y que me enseñaron que todos los días se aprende algo nuevo y en especial al Ingeniero José De Jesús Lorenzo Alegría Cerda, mi tutor, profesor, y amigo, así como también al ingeniero Gustavo Ortiz González mi asesor de estadía, al ingeniero Arístides Salgado y a todos mis profesores que fueron pieza clave en mi formación académica, y a mi compañero Azareel, que colaboró en la realización del proyecto. A la Universidad Tecnológica de Querétaro, por brindarme profesores y personal académico con una muy buena preparación, así gracias a ellos logré reforzar valores como la responsabilidad, compromiso y puntualidad. A el departamento de análisis de imágenes del CICATA, al doctor Juan Bautista Hurtado Ramos, mi asesor de estadía por parte del CICATA y a cada uno de los que laboran en el y en el centro, por darme la oportunidad de realizar en mis estadías en sus instalaciones y formar parte de su gran equipo de trabajo. 5 ÍNDICE RESUMEN .................................................................................................................................... 2 DESCRIPTION ............................................................................................................................. 3 DEDICATORIAS .......................................................................................................................... 4 AGRADECIMIENTOS .................................................................................................................. 5 ÍNDICE.......................................................................................................................................... 6 I. INTRODUCCIÓN ................................................................................................................ 7 II. ANTECEDENTES .............................................................................................................. 9 III. JUSTIFICACIÓN .............................................................................................................. 10 IV. OBJETIVO ........................................................................................................................ 11 V. ALCANCE ........................................................................................................................ 12 VI. ANÀLISIS DE RIESGOS ................................................................................................. 13 VII. FUNDAMENTACIÓN TEÓRICA ...................................................................................... 15 VIII. PLAN DE ACTIVIDADES ................................................................................................ 40 IX. RECURSOS MATERIALES Y HUMANOS .................................................................... 42 X. DESARROLLO DEL PROYECTO ................................................................................... 44 XI. RESULTADOS OBTENIDOS .......................................................................................... 52 XII. CONCLUSIONES Y RECOMENDACIONES .................................................................. 53 XIII. ANEXOS ............................................................................................................................... XIV. BIBLIOGRAFÍA .................................................................................................................... 6 I. INTRODUCCIÓN La tecnología conocida como LED (por sus siglas en inglés, Light Emitting Diode, que en español significa Diodo Emisor de Luz) consiste básicamente en un material semiconductor que es capaz de emitir una radiación electromagnética en forma de Luz, su aplicación está extendida a una gran cantidad de tecnologías, siendo generalmente utilizados para su función de iluminación y siendo perfecto debido a su baja necesidad de energía eléctrica y su alta perdurabilidad, de esta manera se colocó como uno de los principales elementos emisores de luz usado ya en semáforos, pantallas gigantes, electrodomésticos, luces delanteras, traseras e interiores de vehículos de todo tipo e incluso dentro de la iluminación de hogares e industrias, por esto se elige como el principal y único emisor de luz para el tablero de muestreo de información numérica que se planteó como prototipo de estadía. Gracias a su versatilidad y atractivo visual, un tablero es la mejor manera en que se puede dar a conocer información de diversos fenómenos o mostrar en el algo que quieras que sea visible para un gran número de personas desde una corta distancia asta largas distancias y asegurarte de que será vista, un tablero puede mostrar una gran cantidad de tipos de información tales como: - Relojes patrón. - Conversores de señal. - Conteo de la producción. 7 - Controlan la producción con relojes digitales sincronizados mediante software. - Muestran directamente el valor de termómetros. - Cronómetros que trabajan en forma creciente o decreciente, fiscalizando y mostrando tiempos de producción o de eventos. - Controlan procesos. - Dispositivo que indica días sin accidentes. - Muestreo de mensajes de alarma/seguridad. - Secuencias programadas. Como la principal función del prototipo, se manejará el conteo del tiempo, del latín tempus, la palabra tiempo se utiliza para nombrar a una magnitud de carácter físico que se emplea para realizar la medición de lo que dura algo que es susceptible de cambio. Cuando una cosa pasa de un estado a otro y dicho cambio es observado, ese periodo puede cuantificarse y medirse como tiempo. Por ejemplo: “Tendría que pasar por la casa de Marcos, pero no tengo tiempo”, gracias al tiempo podemos organizar los hechos de manera secuencial, este orden deja establecido un pasado (aquello que ya sucedió), un presente (lo que está pasando en el momento) y un futuro (aquello que va a pasar próximamente). Al tenerlo como una magnitud física cuantificable surgió la necesidad de contarlo o tomar su medida de la manera más exacta posible, lo que dio nacimiento a los relojes, cronómetros, temporizadores, y demás aparatos hechos especialmente para la medición y comparación del tiempo. 8 II. ANTECEDENTES Durante varios años consecutivos en el CICATA se a llevado a cabo una carrera, en la cual participa el personal que labora ahí, además de la realización de experimentos y pruebas las cuales necesitan ser cronometradas y los resultados difundidos de una manera en que sean muy visibles, ante esto surgió la necesidad de la creación de un tablero que llamara la atención hacia el y así dar a conocer informaciones este caso de la medición del tiempo que cada corredor acumula en cada vuelta o en la carrera completa, lo más exacto posible, mientras que lo más cercano a dar solución a esta necesidad es un cronómetro digital controlado por un microcontrolador PIC 18F4550 mostrado en 3 display de 7 segmentos, hace su función en base a la programación en el compilador de Micro C, donde se usó la frecuencia del oscilador para generar interrupciones las cuales daban un conteo ascendente y el muestreo de los números es echo po medio de un barrido en el programa. 9 III. JUSTIFICACIÓN Se realizará el diseño de un tablero electrónico de led’s que contará con un cronómetro, con el fin de que en el CICATA se tenga una manera de cronometrar y registrar los tiempos de cada participante de la carrera que se efectúa anualmente, así como una buena herramienta de cronometraje, lo más exacta posible para su uso en la medición de tiempos en un intervalo de segundos hasta horas, además de contar con una característica de selección del color sobre los led’s que lo conformarán, dando una gama muy amplia que va desde el negro hasta el blanco y pueda ser visible desde cercanas y largas distancias, que sea visible, llame la atención y se pueda modificar para la difusión de diversa información dentro del centro. 10 IV.OBJETIVO Diseñar y construir un tablero electrónico de led’s RGB de 4 pines, con dimensiones aproximadas a 20 cm de ancho por 50 cm de largo y 8 cm de espesor. 11 V. ALCANCE Se busca como alcance principal la generación del diseño del tablero electrónico y la aplicación de un cronòmetro. Este prototipo de cronòmetro será controlado por medio de un pic 18f4550 con la implementación de programación en el compilador Mickro C, en el programa principal se usaran variables y para el conteo ascendente se planea hacer uso de interrupciones por desbordamiento del registro del timer 0, y de esa manera aumentar la variable segundos y por medio de una anidación de if’s se llevarà a cabo el aumento en las variables minutos y horas. Deberá comenzar a contar al pulsar un botón de inicio y tendrá la posibilidad de cambiar el color de sus dígitos. Para el cambio de color se usarà el modulador de ancho de pulso (PWM), el cual permite dar una salida de 0 a 5 volts en el pin C2 del puerto C y con un circuito de potencia bastante robusto, se planea dotar de la capacidad de variación de voltaje a los 225 led’s que conformaràn el tablero. Todo esto con la finalidad de tener una buena visibilidad de los dígitos desde largas distancias y de poder generar colores por medio del control de intensidad del rojo, verde y azul (RGB). 12 VI.ANÀLISIS DE RIESGOS Se enumeran una serie de factores o condiciones que pueden detener, retrasar, o frustrar el desarrollo del proyecto. Los factores que pueden hacer que este proyecto fracase son: - El tiempo con el que se dispone para la realización del proyecto, ya que se comenzó con el periodo de estadía casi un mes después de lo usual, debido a que no se encontraban estadías disponibles para todos los egresados del quinto cuatrimestre de TSU en mecatronica, esto provocò un retraso el cual nos deja con solo tres meses para elaborar todo el prototipo y la documentación relevante al proyecto dando como resultado que los tiempos de construcción, planeación, cotización, búsqueda de materiales y prueba del funcionamiento, se vieran afectados y sean muy cortos, dejando muy poco margen para los errores o correcciones, y cualquier atraso podría hacer que el proyecto no sea entregado a tiempo ni en las condiciones deseadas por la empresa. - El presupuesto que proporciona la empresa, puede que el presupuesto dado por la empresa sea muy reducido o pobre, para lo que se pide como proyecto y por lo tanto no se pueda realizar completo o no como a la empresa le gustaría, dejándola inconforme. - Que la empresa no cuente con las instalaciones, material o herramientas que se requieren para la fabricación del prototipo o proyecto propuesto. 13 - La falta de comunicación es otro factor que puede ser causa de fracaso en la estadía, ya sea por cualquier motivo esto puede crear barreras entre el estudiante y el encargado de la empresa, dejando una brecha de intercambio de información que no los deja entenderse y que puede concluir en que, lo que la empresa quería o solicito no es lo que el estudiante entrega al final. 14 VII. FUNDAMENTACIÓN TEÓRICA Microcontrolador Es un circuito integrado programable que contiene todos los componentes de un computador. Se emplea para controlar el funcionamiento de una tarea determinada y, debido a su reducido tamaño, suele ir incorporado en el propio dispositivo al que gobierna, un microcontrolador combina los recursos fundamentales disponibles en un microcomputador, es decir, la unidad central de procesamiento CPU, la memoria y los recursos de entradas y salidas, en un único circuito integrado. Como se muestra en la Figura 1: Figura 1: Muestra el diagrama de bloques de un microcontrolador. 15 Un microcontrolador posee todos los componentes de un computador, pero con unas características fijas que no se pueden alterar. Las partes principales de un microcontrolador son: 1.- procesador. 2.- memoria no volátil para contener el programa. 3.- memoria de escritura y lectura para guardar los datos. 4.- Recursos auxiliares: • Temporizadores o Timers. • Perro guardián o Watchdog. • Protección ante fallo de alimentación o Brownout. • Estado de reposo o de bajo consumo. • Conversor A/D. • Conversor D/A. • Comparador analógico. • Modulador de anchura de impulsos o PWM. • Puertas de E/S digitales. • Puertas de comunicación. 16 Temporizadores o Timers Se emplean para controlar periodos de tiempo (temporizadores) y para llevar la cuenta de acontecimientos que suceden en el exterior (contadores). Para la medida de tiempos se carga un registro con el valor adecuado y a continuación dicho valor se va incrementando o decrementando al ritmo de los impulsos de reloj o algún múltiplo hasta que se desborde y llegue a 0, momento en el que se produce un aviso. Cuando se desean contar acontecimientos que se materializan por cambios de nivel o flancos en alguna de las patitas del microcontrolador, el mencionado registro se va incrementando o decrementando al ritmo de dichos impulsos. Perro guardián o Watchdog Cuando el computador personal se bloquea por un fallo del software u otra causa, se pulsa el botón del reset y se reinicializa el sistema. Pero un microcontrolador funciona sin el control de un supervisor y de forma continuada las 24 horas del día. El Perro guardián consiste en un temporizador que, cuando se desborda y pasa por 0, provoca un reset automáticamente en el sistema. Se debe diseñar el programa de trabajo que controla la tarea de forma que refresque o inicialice al Perro guardián antes de que provoque el reset. Si falla el programa o se bloquea, no se refrescará al Perro guardián y, al completar su temporización, "ladrará y ladrará" hasta provocar el reset. 17 Protección ante fallo de alimentación o Brownout Se trata de un circuito que resetea al microcontrolador cuando el voltaje de alimentación (VDD) es inferior a un voltaje mínimo ("brownout"). Mientras el voltaje de alimentación sea inferior al de brownout el dispositivo se mantiene reseteado, comenzando a funcionar normalmente cuando sobrepasa dicho valor. Estado de reposo ó de bajo consumo Son abundantes las situaciones reales de trabajo en que el microcontrolador debe esperar, sin hacer nada, a que se produzca algún acontecimiento externo que le ponga de nuevo en funcionamiento. Para ahorrar energía, (factor clave en los aparatos portátiles), los microcontroladores disponen de una instrucción especial (SLEEP en los PIC), que les pasa al estado de reposo o de bajo consumo, en el cual los requerimientos de potencia son mínimos. En dicho estado se detiene el reloj principal y se "congelan" sus circuitos asociados, quedando sumido en un profundo "sueño" el microcontrolador. Al activarse una interrupción ocasionada por el acontecimiento esperado, el microcontrolador se despierta y reanuda su trabajo. Conversor A/D (CAD) Los microcontroladores que incorporan un Conversor A/D (Analógico/Digital) pueden procesar señales analógicas, tan abundantes en las aplicaciones. Suelen disponer de un multiplexor que permite aplicar a la entrada del CAD diversas señales analógicas desde las patitas del circuito integrado. 18 Conversor D/A (CDA) Transforma los datos digitales obtenidos del procesamiento del computador en su correspondiente señal analógica que saca al exterior por una de las patitas de la cápsula. Existen muchos efectores que trabajan con señales analógicas. Comparador analógico Algunos modelos de microcontroladores disponen internamente de un Amplificador Operacional que actúa como comparador entre una señal fija de referencia y otra variable que se aplica por una de las patitas de la cápsula. La salida del comparador proporciona un nivel lógico 1 ó 0 según una señal sea mayor o menor que la otra. También hay modelos de microcontroladores con un módulo de tensión de referencia que proporciona diversas tensiones de referencia que se pueden aplicar en los comparadores. Modulador de anchura de impulsos o PWM Son circuitos que proporcionan en su salida impulsos de anchura variable, que se ofrecen al exterior a través de las patitas del encapsulado. Puertos de E/S digitales Todos los microcontroladores destinan algunas de sus patitas a soportar líneas de E/S digitales. Por lo general, estas líneas se agrupan de ocho en ocho formando Puertos. 19 Las líneas digitales de los Puertos pueden configurarse como Entrada o como Salida cargando un 1 ó un 0 en el bit correspondiente de un registro destinado a su configuración. Puertos de comunicación Con objeto de dotar al microcontrolador de la posibilidad de comunicarse con otros dispositivos externos, otros buses de microprocesadores, buses de sistemas, buses de redes y poder adaptarlos con otros elementos bajo otras normas y protocolos. Algunos modelos disponen de recursos que permiten directamente esta tarea, entre los que destacan: - UART, adaptador de comunicación serie asíncrona. - USART, adaptador de comunicación serie síncrona y asíncrona, puerta paralela esclava para poder conectarse con los buses de otros microprocesadores. - USB (Universal Serial Bus), que es un moderno bus serie para los PC. - Bus I2C, que es un interfaz serie de dos hilos desarrollado por Philips. - CAN (Controller Area Network), para permitir la adaptación con redes de conexionado multiplexado desarrollado conjuntamente por Bosch e Intel para el cableado de dispositivos en automóviles. En EE.UU. se usa el J185O. 20 Temporizadores En los microntroladores PIC de clase media tiene al menos tres módulos básicos para temporiza, que se identifican con los nombres de Timer0, Timer1 y Timer2. Todos los PIC disponen al menos de Timer0. Algunos PIC tienen uno o dos módulos adicionales para temporizar, que amplían las posibilidades de los módulos básicos. Son los denominados módulos de comparación captura y modulación pulsos en anchura, o módulos CCP (Capture/Compare/PWM), que comparten componentes y funciones con el Timer1 y el Timer2. Cada uno de los temporizadores disponibles en los pic de clase medie tiene, como elemento esencial, un contador sincrónico ascendente de 8 o 16 bits. Estos contadores se pueden programar para contar pulsos internos o externos. El numero almacenado en cada contador (valor de la cuenta) se leer o modificar mediante la escritura o lectura de registros de funciones especiales asociados al temporizador en cuestión. El desbordamiento de los contadores queda reportado en bits indicadores disponibles en esos registros, y puede generar también una solicitud de interrupción al microcontrolador. Los temporizadores pueden disponer de un contador asíncrono auxiliar. Este contador auxiliar se inserta en el camino de los pulsos antes del contador principal, en cuyo caso funciona como un pre-divisor (prescaler) o después del contador principal, funcionando entonces como post-divisor (postscaler); el timer0 y el timer1 solo cuentan con pre-divisor, el timer2 en cambio, cuenta con ambos con pre-divisor y post-divisor. 21 El módulo CCP Los módulos de captura comparación y modulación de pulsos de anchura, son circuitos que junto con los módulos Timer1 y Timer2 permiten temporizar de otras formas. En un mismo microcontrolador PIC pueden existir hasta dos módulos CCP, denominados CCP1 y CCP2. Un módulo CCP está formado básicamente por una pareja de registros de 8 bits denominados CCPRxH y CCPRxL. La letra x debe de ser sustituida por el 1 o el 2 según el modulo al que se haciendo referencia. En estos registros se puede almacenar respectivamente la parte alta y la baja de un número de 16 bits. Cada módulo CCP utiliza también el registro CCPxCON para el control y el bit CCPxIF del registro PIR como indicador de que se ha producido un evento. Cada módulo CCP puede operar en cualquiera de los siguientes modos: - Modo de captura. El módulo CCP captura el valor del timer1 cuando ocurre un evento externo en la terminal CCPx. - Modo comparador. El registro del módulo almacena un número de 16 bits se compara con el valor del Timer1 y, según el resultado de la comparación, se genera un evento, que puede incluir un cambio en la terminal CCPx. - Modo modulador de pulsos de anchura (PWM). El módulo CCP y el Timer2 forman un modulador de ancho de pulsos con salida por la terminal CCPx. 22 Las terminales CCPx (CCP1 y CCP2) son entradas en modo de captura y salidas en modo comparador y PWM. Estos terminales, uno por cada módulo CCP existente en el PIC, comparten funciones con los terminales del puerto C. En los modos captura y comparador, el Timer1 es utilizado por módulos CCP como base de tiempo. En estos módulos, el Timer1 debe ser programado como temporizador o contador en modo sincronizado. En el modo PWM, el Timer2 que funciona siempre como temporizador, determina la frecuencia de la señal PWM. Modulo CCP usado como PWM El parámetro fundamental de una modulación PWM es la frecuencia (o su inverso el periodo) de modulación. En los PIC dicha frecuencia es programable (con ciertas limitaciones) en base a varias variables: - La frecuencia del oscilador principal Fosc - El pre-scaler (PRE) o divisor previo del timer TMR2 que puede tomar los valores 1:1, 1:4 o 1:16 - El registro PR2 (0-255) asociado al timer TMR2 La frecuencia PWM responde a la fórmula: F_pwm = F_osc / [4 x PRE x (PR2+1)] 23 lo que es lo mismo, el periodo del PWM será el inverso de dicha frecuencia: T_pwm = [ (PR2+1) x 4 x PRE ] x Tosc El valor máximo del divisor previo PRE es 16 y el de (PR2+1) es 256. Por lo tanto la frecuencia PWM más baja posible será Fosc/16384. Para un oscilador de 20 MHz tenemos una Fpwm mínima de 1.22 KHz (20000/16384). El módulo PWM usa el timer TMR2, por lo que éste no podrá usarse como temporizador de propósito general mientras se esté usando PWM. Si que es posible usarlo (y ahorrarnos gastar otro timer) si queremos hacer saltar una interrupción cada cierto tiempo. El post-scaler del TMR2 no tiene efecto sobre la frecuencia PWM, pero si influye sobre cuando salta (si está habilitada) la correspondiente interrupción (TMR2_flag). Si por ejemplo el post-scaler es 1:16 entonces la interrupción del TMR2 saltará cada 16 periodos del PWM. Lo primero que tenemos que hacer para usar el módulo PWM es habilitarlo indicando que va a usarse como generador de una onda PWM, ya que dicho módulo es compartido con otras funciones (Capture/Compare). La forma de hacerlo es poner a 11XX los 4 bits menos significativos del registro CCP1CON. Los PIC18 suelen tener 2 módulos PWM por lo que existe un segundo registro CCP2CON. 26 24 Podemos habilitar uno o los dos módulos independientemente. Sin embargo, como ambos usan el registro PR2 y el timer TMR0 como base de tiempos, la frecuencia programada será la misma en ambos módulos. Lo que si es posible variar por separado es el ciclo de trabajo (duty cicle o DC) de cada módulo. El ciclo de trabajo se codifica con un número de hasta 10 bits (01023) almacenado de la siguiente forma: CCPR1L : 8 bits más significativos del ciclo de trabajo. CCP1CON.DC1B0 y DC1B1 (bits 5 y 6 de CCP1CON): Guardan los 2 bits menos significativos. La programación del % ON del segundo módulo es similar pero usando los registros CCP2CON y CCPR2L. Con los 10 bits dados el ciclo de trabajo se podrá especificar en principio con 1024 niveles (0 corresponde a 0% y 1023 al 100%). Sin embargo, los valores válidos pueden ser menores que los 1024 posibles, un ejemplo de esta relación se muestra en la Figura 2. La razón es que el valor de DC (duty_cicle) determina el tiempo que la señal se mantiene alta (ON) de la forma: T_on = [ DC x PRE] x Tosc 25 Recordando que el tiempo total del periodo es: T_pwm = [ (PR2+1) x 4 x PRE ] x Tosc Comparando ambas fórmulas y siendo obvio que el tiempo total ON no puede exceder el tiempo total del periodo tenemos que el valor máximo de DC es (PR2+1) x 4. Por lo tanto, aunque podemos dar a DC cualquier valor entre 0 y 1023 está claro que en realidad debemos limitarnos al rango [ 0, (PR2+1)x4 ]. Valores más altos van a hacer que Ton > Tpwm, o lo que es lo mismo, la señal PWM se mantiene alta todo el rato (100%). En resumen, para mantener la máxima resolución (10 bits) a la hora de especificar DC es preciso usar PR2=255. Para una cierta frecuencia del oscilador Fosc podemos optar por tres frecuencias con la máxima resolución: Frecuencias por debajo de Fosc/16384 no son posibles porque los valores de PR2 y PRE están ya en su máximo posible. Frecuencias por encima de Fosc/1024 son posibles pero a costa de bajar PR2 y por lo tanto disponer de menor resolución para el ciclo de trabajo. F_pwm = F_osc / [PRE x 4 x (PR2+1)] = Fosc/(1 x 256) = 78 KHz 28 26 Para un oscilador de 20 MHz. La razón por la que para frecuencias muy altas no podemos especificar con tanta precisión el ciclo es que el periodo empieza a hacerse muy pequeño. En el caso anterior (Fpwm = Fosc/256) es obvio que en un ciclo del PWM sólo entran 256 ciclos del oscilador. Como es imposible que el micro haga algo entre ciclos de reloj, está claro que sólo puede bajar la línea del PWM en 256 puntos como mucho (esto es, con una resolución de 8 bits). Valores de frecuencias intermedios son también posibles, pero de nuevo van a exigir PR2<255. Por ejemplo para conseguir 10 KHz con un oscilador de 20 MHz Fosc / Fpwm =20000/10 = 2000 = 4 x PRE x (PR2+1) -> PRE x (PR2+1) = 500 Lo que puedo conseguir con PRE=2 y PR2 = 249. Pero entonces el valor del ciclo de trabajo (DC) tiene que moverse en el rango 0 a 4(PR2+1) = 1000. Con DC=1000 ya alcanzamos un 100% del ciclo de trabajo y valores superiores no tendrán ningún efecto extra. En cuanto al pin de salida al que se manda la señal PWM, usualmente la salida PWM1 va al pin RC2 y la del PWM2 al RC1 (notad el cambio 1-2). En algunos 29 27 dispositivos (consultar datasheet) es posible cambiar la salida de PWM2 a otro pin mediante un bit de configuración. Figura 2: reacción del modulador de ancho de pulso al aumento del Duty Cycle. Transistores bipolares El transistor es un dispositivo de tres terminales que se construye uniendo tres capas de material semiconductor extrínseco. En la Figura 3, se muestran los dos tipos de transistor existentes, el transistor pnp y el transistor npn, cada uno con una forma de polarización correcta. Las terminales del transistor reciben los siguientes nombres: emisor E, base B y colector C, tal como se muestra en la figura. La capa del emisor se encuentra fuertemente dopada, la del colector ligeramente dopada, mientras que la de la base se encuentra muy poco dopada. La proporción de espesor total con respecto a la capa central (B) es 150:1, así 28 mismo la proporción de dopado de las capas externas respecto a la capa central es cercana a 10:1. Figura 3: Tipos de transistores: (a) npn; (b) pnp Operaciones del transistor. La siguiente afirmación es la base para el entendimiento de las distintas configuraciones del transistor y debe comprenderse totalmente: Regla de polarización del transistor. Si la unión pn de un transistor se encuentra en polarización directa (polarización de conducción); entonces la restante unión np debe encontrarse en polarización inversa. Cuando el diodo se polariza siguiendo la consideración anterior, entonces por la unión polarizada en directa existe gran conducción, puesto que la región de agotamiento es muy estrecha tal como lo indica la Figura 4, a diferencia de lo ancho de la región de agotamiento de la unión polarizada en inversa. En la misma 29 figura se puede apreciar las corrientes resultantes, la mayor parte de corriente se dirige de emisor a colector, mientras que una corriente mínima se dirige de emisor a base. Aplicando la LCK al transistor se tiene que: Sin embargo y como es posible también apreciar de la Figura 4, la corriente de colector, está formada por dos componentes: A la componente de corriente minoritaria se le denomina corriente de fuga y es del orden de entre 10-6 y 10-9 por lo que generalmente se desprecia (esta corriente es sensible a la temperatura). Figura 4: Flujo de portadores mayoritarios y minoritarios en un transistor pnp Configuraciones del transistor. Siguiendo la regla de polarización del transistor, son posibles tres configuraciones a continuación numeradas: 30 Configuración base común Configuración emisor común Configuración colector común El término común se deriva del hecho de que en cada configuración la terminal con el adjetivo "común", es común tanto a la entrada como a la salida. Configuración base común. La flecha dentro del símbolo del transistor define la dirección de la corriente del emisor como se puede apreciar en las Figuras 5, (a) y (b). Figura 5: notación y simbolos empleados en la configuración base comun, transistor pnp(a) y tansistor npn(b). 31 Figura 6: Características de salida o del colector para un amplificador de transistor de base común, relaciona los valores de corriente de colector (Ic) al variar los valores de voltaje colector base (Vcb), para distintos valores fijos de corriente de emisor (Vcb). En esta curva se distinguen tres zonas: - Región de saturación. Es aquella región que inicia donde Vcb<0, es decir para valores negativos de Vcb. En esta región tanto la unión base-emisor como la unión colector-base se encuentran polarizadas en directa. Máxima corriente de colector. - Región de corte. Es aquella región donde la corriente de colector es cero Amperes. En esta región tanto la unión base-emisor como la unión colectorbase del transistor se encuentran polarizadas en inversa. Corriente de colectar mínima. 32 - Región activa. Es la región de operación normal y es la utilizada para los amplificadores lineales (sin distorsión), además en esta región la unión base/emisor se encuentra polarizada de forma directa, mientras que la unión colector/base se encuentra polarizada de forma inversa. De la gráfica 5.5 se puede comprobar directamente que la ec 5.2b es cierta, es decir Ie ( Ic. 33 Configuración emisor común. Figura 7:: Notación y símbolos empleados con la configuración de emisor común: (a) transistor npn; (b) transistor pnp, muestra esta configuración, las curvas características del transistor bajo esta configuración. 34 Figura 8: Características de un transistor de silicio en la configuración de emisor común: (a) características del colector; (b) características de la base. En la región activa de emisor común se tiene la misma polarización para la base/emisor y colector/base que en la configuración base común. 35 Configuración colector común. Esta configuración se muestra en la Figura 9 y es utilizada principalmente para propósitos de acoplamiento de impedancias, ya que cuenta con una alta impedancia de entrada y una baja impedancia de salida, de forma contraria a las impedancias de las configuraciones de base común y emisor común. Figura 9 Símbolos y notación utilizados con la configuración de colector común (a) transistor pnp; ( b) transistor npn. Para propósitos prácticos, las características de salida para la configuración de colector común, son las mismas que para la configuración emisor común. Para esta configuración las características de salida se grafican como Ie en función de Vce para un rango de valores de Ib. 36 La acción amplificadora del transistor. La acción básica amplificadora del transistor se produce mediante la transferencia de una corriente I desde un circuito de baja resistencia a uno de alta resistencia. La diferencia en la resistencia (inherentes al transistor) se debe a la unión en polarización directa en la entrada (base-emisor) y a la unión en polarización inversa en la salida (base-colector) para el caso de las configuraciones base común y colector común. La palabra transistor se deriva de el hecho mostrado en la Figura 10. Figura 10: Acción de amplificación de volttaje del transistor para la configuración de base común. 37 Determinación de la corriente de saturación. Aplicando un "corto circuito" entre las terminales colector-emisor como se muestra en la Figura 11 se tiene que: Figura 11:determinación de la corriente de saturación. La ecuación de la malla colector-emisor que representa la polarización estabilizada en emisor se muestran el la Figura 12. Figura 12: Formulas usadas para la determinación de la corriente de saturación. 38 Entonces al dibujar estos puntos sobre la gráfica que representa las características del dispositivo y unirlos mediante una línea recta, se obtiene el punto de operación Q mostrado en la Figura 13, para un determinado valor de Ibq. Figura 13: Trazado de la recta de carga sobre las curvas características del dispositivo para la determinación del punto de operación Q. Para la polarización estable en emisor. 39 VIII. PLAN DE ACTIVIDADES El diagrama 1: muestra el esquema de tiempos de duración y de relación entre las tareas a realizar: Diagrama de tiempos del proyecto: DISEÑO DE TABLERO ELECTRÓNICO BASADO EN LED’S Para la empresa: “CICATA”, Centro de Investigación de Ciencia Aplicada y Tecnología Avanzada. Este diagrama de Gantt es la representación gráfica y simultánea tanto de planificación como de programación concreta de los procesos de planeación y desarrollo del proyecto de estadía profesional de nombre: diseño de tablero electrónico basado en led’s, Mediante el uso del diagrama de Gantt podemos representar y monitorizar el desarrollo de las distintas actividades de el proceso, durante un período de tiempo, de manera fácil y rápida. 40 En este diagrama las tareas son enumeradas para colocarlas en forma de listado para darle una estructura ordenada al Gantt, se representan cada tarea de un color diferente para su rápida localización en el calendario que se ubica en la parte superior del esquema, el calendario esta dividido en semanas, así se muestra de forma muy clara las distintas fases de el proceso, de manera ordenada y en forma de gráfica (barras horizontales), permitiendo planificar y programar las distintas fases del proyecto de estadía y mostrar la duración de cada tarea, su inicio y su final, así como que tarea la precede y cual esta después de esta, generando una cronología o un guía para ser seguida para así poder terminar y entregar el proyecto, en tiempo y orden según lo acordado con la empresa. 41 IX.RECURSOS MATERIALES Y HUMANOS Materiales: Para la fabricación de la estructura - lamina de aluminio de 1/6 de espesor - PTR de aluminio Para fabricación de la fuente de alimentación y circuito de control - Microcontroladores (pic18f4550) - reguladores de tención - Alambre de cobre calibre 20 - transformador entrada: 127 V, salida: 24 V 1 A - Tablilla de PCB - Leds RGB - Soldadura para cautín - Amplificadores operacionales (OPAMS) - Capacitores electrolíticos, cerámicos y de poliéster - Transistores - Resistencias - Acido férrico 42 Equipo y herramental: - Laptop con software de mickro C PRO for PIC, PICkit 2 v2.61, Multisim y Proteus 7 - Multímetro - taladro de banco - Sierra de disco - Pinzas de corte - mini pulidor - Multímetro - Brocas - Cautín - Desarmadores clemeros - programador para pic de 40 pines 43 X. DESARROLLO DEL PROYECTO El proyecto se inició en una reunión con el asesor de proyecto asignado en el CICATA, con el fin de establecer los parámetros, presupuestos, características y funciones del mismo así como los objetivos, alcances y resultados a los que se espera llegar, una vez determinado todo lo anterior se prosiguió con la búsqueda de los mejores materiales que se ajustarán al presupuesto establecido por el asesor. En el proceso de cotización y búsqueda de los materiales y componentes se empleó todo un mes del tiempo de duración de la estadía, ya que el presupuesto era demasiado pequeño para lo que se quería construir como primer diseño y el diseño paso por varias modificaciones hasta encontrar la forma de hacerlo económico, funcional y que cumpliera con las especificaciones del asesor. Ya con esto bien definido se comenzó con el diseño de la estructura la cual soportara todo el circuito eléctrico y electrónico tanto la fuente de alimentación como los circuitos de control, cada uno de los led’s y todas sus conexiones, la estructura además debía se resistente ya que se planea su uso en exteriores y a la intemperie, ser ligera y lo menos robusta posible, por lo tanto se eligió el aluminio como principal material de trabajo. El aluminio además de ser resistente a la oxidación, el liviano y muy fácil de trabajar para darle forma y crear estructuras con él, una lámina de aluminio de 1/16 de pulgada de espesor seria el material propuesto para la construcción de todo la carcasa del prototipo, mientras que con 6 metros de PTR de 1 pulgada por 1 pulgada, también de aluminio, se planeo la 44 generación de un panel y darle un espacio a cada led, como control del prototipo se seleccionó el pic18f4550 por su bajo costo y contar con características suficientes para la elaboración del cronometro, los led’s seleccionados fueron de tipo RGB, con ellos se puede generar una amplia gama de colores, ya que cuentan cada led cuenta con 3 diodos emisores los cuales pueden variar su intensidad luminiscente al variar su tención de alimentación, también su costo es bajo es de tan solo 4 pesos por unidad, para el prototipo se diseñó una fuente de conversión de voltaje la cual toma los 127 volts en corriente alterna de la línea y los convierte a 15 volts de corriente directa para su uso en la alimentación del prototipo, como una característica principal todas las partes del circuito debían ser desmontables y fáciles de remplazar desde los led’s hasta los microcontroladores. Con la selección de materiales y componentes que se integrarían para la fabricación del prototipo, vino el diseño de la estructura y del panel o malla, donde se ubicará cada led. Para la fabricación de la estructura se utiliza la lámina de aluminio, como la que se muestra en la Figura 14, y sobre una de sus caras se trazó la plantilla en dos dimensiones de un semi prisma rectangular, una especie de charola, de 28 cm de altura por 64 cm de largo y con una profundidad o ancho de 8 cm, se remarcaron las líneas de corte pero no las de dobles, para evitar una posible confusión entre estas dos, posteriormente se realizarón los cortes en la plantilla con un minipulidor 45 y un disco de corte fino para dejarla lista para ser doblada, se comenzó a doblar hasta darle la forma de una charola, y así tener la carcasa del panel de led’s, que sería la encargada de resistir la oxidación, medio ambiente y su uso a la intemperie. Figura 14: Lamina de aluminio que se seleccionó y recomendó para la fabricación de la estructura. Al fabricar el panel se usaría el PTR cuadrado de aluminio, este se cortaría en pequeñas secciones de 2 cm de largo, se puliría su interior y limpiaría lo mejor posible con el fin de darle un acabado de espejo, el que reflejaría y aumentaría la iluminación proporcionada por el led que contendrá en su interior la sección de 2 cm, en la Figura 15,muestra de 1 de las 225 secciones, y así aumentar el rango de distancia visible del cronómetro, las secciones fueron cortadas con una sierra de disco horizontal, una vez que se concluyó con la limpieza a cada una de las 46 225 secciones cortadas, se les unió por medio de un pegamento de tipo industrial para crear la malla de 9 por 25 secciones, Figura 16. Figura 15: Una de las 225 secciones ya terminada con acabado espejo en su interior, con una profundidad de 2 cm. Figura 16: Las 225 capsulas, generando el panel de 64 cm de largo por 23 cm de altura y con un ancho de 2 cm. 47 Se construyó una base para soportar y colocar cada led en el centro de su respectiva capsula reflectora, de la lámina de aluminio se cortó una sección rectangular de 23.5 cm de altura por 64 cm de largo, a la que se le trazó con la ayuda de instrumentos como regla y rayador de lámina, cuadrados de 1 pulgada y en el centro de cada cuadrado se marcó y realizó un barreno de ¼ de pulgada de diámetro, para en el colocar el led, a esté rectángulo se le pego la malla de capsulas reflectoras con el mismo pegamento de tipo industrial que se usó para la creación de la malla. Se fabricó una serie de soportes o enchufes donde se montaría cada led, esto con el fin de que su remplazo por mal funcionamiento fuera una tarea sencilla que no demorara mucho tiempo, el cambio por una unidad nueva, y se tuviera que desoldar y volver a soldar el led, al tomar unos simples bornes de conexión y soldarle terminales se cumplió con estas características (Figura 17). Los bornes vienen en tiras de 40 entradas tipo hembra, estas tiras se cortaron en secciones de 4, ya que cada led tiene cuatro pines de conexión los cuales embonarían perfectamente con las entradas hembra de los bornes, se cortaron los bornes en secciones con la ayuda de un cúter, al ya haber sido cortados a cada sección se les soldó 4 cables en el siguiente orden y utilidad: - Cable negro: terminal negativa o tierra común de los tres diodos emisores de alta intensidad RGB (rojo, verde, azul). 48 - Cable rojo: terminal positiva del diodo emisor de alta intensidad de color rojo. - Cable verde: terminal positiva del diodo emisor de alta intensidad de color verde. - Cable azul: terminal positiva del diodo emisor de alta intensidad de color azul Todo el arreglo de led’s se soldó en conexión paralelo, se tomó la terminal roja de todos lo led y se conectó a la salida de la etapa de potencia del PWM designada para este color, se realizó el mismo proceso con el verde y el azul, sólo la terminal negra era conectada de manera independiente a otras salidas de la etapa de potencia proveniente de los puertos del pic, para cada led, debido a que esta se encargaría de ir formando los números en el panel por medio de la programación en los pic’s. Figura 17: Muestra de la clema de conexión diseñada para este proyecto, se planea usar para la conexión de cada led. 49 Posteriormente se construyó el circuito de control este fue más sencillo ya que solo consta de 2 pics 18f4550, y los botones de inicio, paro y reset, se realizó el diseño de la placa pcb para cada uno de los pic, este diseño solo incluye una base para el pic, bornes de conexión para cada puerto que pueden ser usadas como salidas o entradas dependiendo de la programación, como primer paso el diseño de la placa es impreso en un hoja de acetato con una impresora láser, esta hoja con el diseño se coloca sobre la placa de cobre y es planchada, para que la tinta se deposite y adhiera sobre el cobre de la placa, la placa ya con la tinta del diseño sobre el cobre es sumergida en ácido férrico, este ácido se encarga de eliminar el cobre de las zonas que no fueron cubiertas por la tinta y así solo dejar pistas de cobre de acuerdo a como se dibujaron en el diseño, al sacarla del ácido se limpia con agua y se lija para dejar las pistas lo más limpias posibles, al hacer el diseño de las pistas se tomó en cuenta que en ellas no se puede dejar ángulos de 90 grados ya que este tipo de ángulos produce ruido en el circuito y esto daña los componentes eléctricos. Al terminar con lo anterior se prosiguió con el diseñó y la fuente de conversión de voltaje de 127 V a 15 V, 1 A, se realizó el circuito y se simulo en el programa de multisim para corregir posibles fallas, observar y estar seguro de su correcto funcionamiento y que el voltaje de salida fuera el indicado para la alimentación del prototipo, imagen de simulación en la Figura 18. Una vez que se comprobó su funcionalidad y tención de salida correcta, se pasó el diseño del circuito a una hoja de acetato y de esta, a la placa de cobre para ser sumergida en ácido férrico y 50 conseguir las pistas necesarias para la construcción de la fuente la cual se montara en un costado del prototipo. Figura 18: Imagen de la pantalla del simulador de multisim, este programa se uso para la simulación de todos los circuitos eléctricos, y en esta imagen se muestra la simulación del circuito de la fuente de conversión de voltaje, que será usada en el prototipo, antes mencionado. Al final se integrarían todas las partes anteriormente mencionadas, y se unierian por medio de tornillos entre sí para dar la posibilidad de ser desensamblado para su mantenimiento, revisión y reparación en caso de mal funcionamiento. Se conectarían los led’s a los circuitos de potencia y los circuitos de potencia se conectarían a las salidas de los pic’s, en las entradas se montaron el botón de paro, el botón de arranque, el botón reset y tres perillas para el control manual del color de los led’s y se cargó el programa en cada uno de los pic’s. 51 XI.RESULTADOS OBTENIDOS Se cumplió con lo propuesto en cuanto a diseño y funcionalidad, se diseño un tablero electrónico de led’s de 20cm de altura por 50cm de largo y con un espesor de 8cm, alimentado por la tención de línea de CFE (Comisión Federal de Electricidad), de 127 volts, con un control para el inicio y detención del conteo del tiempo, el control manual y automático del color que emiten los leds RGB por medio del modulador de ancho de pulso del pic 18f4550,se aumentó la luminiscencia y el rango de visibilidad de cada led por medio de la cápsula refractiva de aluminio, que cada uno tiene, se logró mostrar el conteo de tiempo lo más exacto posible, gracias a la programación escrita en los microcontroladores y se diseñó una estructura bastante resistente al medio ambiente que fue planeada para ser usada en exteriores e interiores, de las medidas solicitadas y liviana además dentro del presupuesto establecido para el proyecto. 52 XII. CONCLUSIONES Y RECOMENDACIONES Para proyectos futuros relacionados a este o al uso de led’s RGB, se recomienda buscar microcontroladores con una más amplia cantidad de herramientas y de puertos sobre todo los de PWM, ya que son muy requeridos para un mejor control de la iluminación y de los led’s RGB y sobre el color que emitan, los microcontroladores de MicroChip de la familia 16F, son una buena opción para ser usados, además del uso de tarjetas especiales que regulan la tensión y la corriente de los led’s , además de una gran cantidad de tarjetas para la generación de barridos y así crear las imágenes de manera más sencilla, con una mayor disponibilidad del programa que utilizan y una gama de producción de imágenes más amplia, en cuanto a costos en la experiencia, lo más caro del prototipo fue la gran cantidad de led’s que usa, el prototipo sòlo cuenta con 250 led’s y esto implicó una inversión de $1000 pesos mexicanos, sòlo para los led’s, así que se debe de buscar el precio más bajo del mercado para este componente. Durante la realización del prototipo, la parte de cotización, búsqueda y selección de materiales consumió mucho tiempo, más del planeado, lo que generó un retraso en el proyecto el cual no pudo ser corregido a tiempo así que el prototipo fue entregado ya pasada la fecha planeada, este es un grave problema y debe de ser evitado, en muy pocas ocasiones puede ser recuperado el tiempo perdido. 53 XIII. ANEXOS Circuito de potencia para control de la intensidad de 1 led por medio del PWM (Figura 19) Figura 19: La salida del PWM no proporciona la potencia necesaria para lograr el encendido de componentes que tengan un alto consumo de corriente, por eso la salida del PWM debe ser tomada y mandada a un circuito de potencia independiente el cual nos proporcione el amperaje que es requerido para el componente a usar, este circuito esta constituido por la fuente externa, un transistor en conexión de emisor común y una resistencia, el transistor tiene en el circuito la función de switch modulado ya que este reacciona a la corriente proveniente del voltaje de PWM y la resistencia de base, para permitir o limitar el paso de corriente por él y así regular la potencia del componente eléctrico q se desea controlar. 54 Diagrama de pines del pic 18f4550 (Figura 20) Figura 20: Se muestra el nombre y las funciones que maneja cada uno de los pines, de cuales son usados para la alimentación del microcontrolador y la ubicación y cantidad de pines, por puerto cada puerto con el que cuenta. 55 Tecnicas para la localización de fallas en transistores. Las siguientes mediciones básicas se deben llevar a cabo tal como se ilustra en las figuras correspondientes para detectar el estado (defectuoso o no) de un transistor BJT. - Para un transistor en estado de "encendido", el voltaje Vbe debe andar alrededor de 0.7 V. Figura 21. - Para el transistor amplificador típico en la región activa, Vce normalmente se encuentra de 25% a 75 del valor de la fuente de alimentación (Vcc). Figura 22. Figura 21: verificación del nivel de CD de Vbe. Figura 22: Revisión del nivel de Vce. 56 Configuracion de terminales del BC545, (Figura 23). Figura 23: Clasificación de las terminales del integrado BC547, un transistor bipolar, de tipo npn, el cual se usaría para el circuito de potencía del barrido, para el muestreo y cambió de los nùmeros en el cronómetro. 57 XIV. BIBLIOGRAFÍA Fernando E. Valdés Pérez, R. P. (2007). Microcontroladores: fundamentos y aplicaciones con PIC. Marcombo. H.F.G. Gwyther, (2006) potencia eléctrica y electrónica de potencia. Alfaomega Donate, A. H. (2004). Electrónica Digital Fundamental. Marcombo: Ghandi. 58
 0
0
Anuncio


Descargar
Anuncio
Añadir este documento a la recogida (s)
Puede agregar este documento a su colección de estudio (s)
Iniciar sesión Disponible sólo para usuarios autorizadosAñadir a este documento guardado
Puede agregar este documento a su lista guardada
Iniciar sesión Disponible sólo para usuarios autorizados