1
2
Física General I Paralelos 05 y 22. Profesor RodrigoVergara R
Física General I Paralelos 05 y 22. Profesor RodrigoVergara R
0105) Movimiento en 2D y 3D
Los movimientos analizados en el capítulo anterior (MRU, MRUA, Movimiento vertical) se
caracterizaban por tener una sola componente vectorial: en el eje x para el movimiento horizontal, y
en el eje y para el movimiento vertical. En el caso
general, el movimiento puede ser en
ry
• Dos dimensiones (plano), como en el caso
del movimiento de proyectiles y movimiento
circular
P
• Tres dimensiones (espacio)
r
r
Se define el vector posición de un cuerpo en el
espacio con el vector que va entre el origen del
sistema de coordenadas cartesiano y el punto P de
ubicación. En referenciar a la figura 1, se puede decir
que el vector posición r de un cuerpo ubicado en el
punto P está dado por:
rx
0
x
rz
r
r = r x xˆ + r y yˆ + r z zˆ
Figura 1) Vector posición
y
Las componentes vx, vy y vz de la velocidad
en cada punto se pueden obtener derivando
las respectivas componentes del vector
posición respecto del tiempo. Así
0
x
z
dr y
dr x
dr
, vy =
y vz = z
dt
dt
dt
Figura 3) Velocidad instantánea
r
r
r
r v − v 1 ∆v
a= 2
=
∆t
∆t
P2
Trayectoria
Considere una partícula que se mueve a través
r
r1
del espacio, en una trayectoria generalmente
0
x
r
curva, como se aprecia en la figura 2. Durante
r2
un intervalo de tiempo ∆t, la partícula se mueve
r
∆r
desde
el punto P1, donde su vector posición es
P1
z
r
r1 , hasta el punto P2, donde su vector posición
Figura 2) Definición de vector posición
r
es
r2 .
El
cambio
de
posición
(desplazamiento)
durante es intervalo es
r r r
∆r = r2 − r1 . Se define la velocidad media de cambio de la posición del móvil entre esos
instantes como:
r r
r
r r −r
∆r
v= 2 1 =
∆t
∆t
Se define la aceleración instantánea de cambio de posición como el
límite de la aceleraci´n media cuando ∆t tiende a cero, por lo que
corresponde a la derivada del vector velocidad instantánea.
A rmedida que ∆t tiende a cero, los puntos P1 y P2 se juntan cada vez más,r y en el límite, el vector
∆r se hace tangente a la curva de la trayectoria. Como la dirección de ∆r es también la dirección
r
de v , se concluye que, en todo punto de la trayectoria, el vector velocidad instantánea es tangente
a la trayectoria, tal como se aprecia en la figura 3.
r
v1
r
v2
r
∆v
Figura 4) Cálculo de
cambio de velocidad
r
r
r
r
∆ a dv
a = lim a = lim
=
∆t →0
∆t →0 ∆t
dt
r
Por construcción (ver figura 4), vemos que, a medida que ∆t tiende a cero, el vector ∆v siempre
apunta hacia el lado cóncavo de una trayectroia curva, o sea, hacia el interior de cualquier curva
descrita por la partícula. Además, cuando una partícula sigue una trayectoria curva, su vector
aceleración siempre es distinto de cero aunque la magnitud de su velocidad sea constante.
Las componentes ax, ay y az de la velocidad en cada punto se pueden obtener derivando las
respectivas componentes del vector velocidad respecto del tiempo. Así
Se define la velocidad instantánea de cambio de posición como el límite de la velocidad media
cuando ∆t tiende a cero, por lo que corresponde a la derivada del vector posición.
r
r
r
r
∆ r dr
v = lim v = lim
=
∆t →0
∆t →0 ∆t
dt
∆r
r
v1
P1
Considerando el mismo intervalo ∆t del análisis anterior, el cambio de
r r
r
velocidad instantánea entre durante ese intervalo es ∆v = v 2 − v1 .
Se define la aceleración media de cambio de la posición del móvil
entre esos instantes como:
y
r
rr 1
r 2r
r
v2
r
v = v x xˆ + v y yˆ + v z zˆ
donde v x =
Trayectoria
P2
r
a = a x xˆ + a y yˆ + a z zˆ
donde a x =
dv y
dv x
dv z
, ay =
y az =
dt
dt
dt
En términos del vector posición:
3
Física General I Paralelos 05 y 22. Profesor RodrigoVergara R
d 2 ry
d rx
d 2 rz
a
=
y
,
a
=
y
z
dt 2
dt 2
dt 2
2
ax =
r
En general, el vector aceleración a de
una partícula puede descomponerse en
dos componentes, según se aprecia en
la figura 5:
r
• La
componente
a⊥ ,
perpendicular al vector velocidad
r
v.
r
• La componente a // , paralela (o
antiparalela) al vector velocidad
r
v.
r
v
P
Tangente en P
r
a
r
a⊥
r
a//
Normal
en P
Figura 5) Componentes tangencial y normal de la
aceleración.
Cada una de estas componentes tiene efectos diferentes en el vector velocidad
•
•
r
La componente a // tiene el efecto de cambiar la magnitud y, eventualmente, el sentido de
r
v , pero no surdirección. En el movimiento en una dimensión, la aceleración tiene solamente
componente a // .
r
r
La componente a ⊥ tiene el efecto de cambiar la dirección de v , pero no su magnitud. En el
r
movimiento circular uniforme (MCU) la aceleración tiene solamente componente a ⊥ .
r r
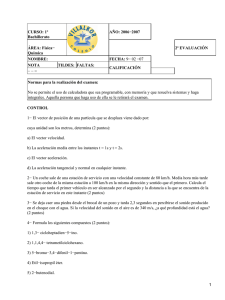
En la figura 6 se visualiza la relación geométrica existente entre los vectores v y a para diferentes
tipos de movimiento.
Figura 6) Relación geométrica entre los vectores velocidad y acelearción para diversos
tipos de movimientos
 0
0