silabo de dinamica - Universidad Nacional de San Martín
Anuncio

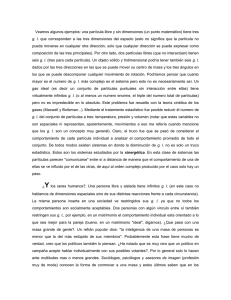
UNIVERSIDAD NACIONAL DE SAN MARTIN FACULTAD DE INGENIERIA CIVIL Y ARQUITECTURA Departamento Académico de Ingeniería Civil TARAPOTO SILABO DE DINAMICA AREA: ESTRUCTURAS I. DATOS INFORMATIVOS 1.0 Facultad 1.1 Escuela Profesional 1.2 Departamento Académico 1.3 Semestre Académico 1.4 Código del Curso 1.5 Ciclo 1.6 Créditos 1.7 Duración del Curso 1.8 Horas Semanales Pre-requisitos: Curriculares Instruccionales 1.10 Profesor Responsable : : : : : : : : : Ingeniería Civil Ingeniería Civil Ingeniería Civil IV Ciclo O31206 2011-I Cinco (05). 17 semanas/102 Horas. Teoría 04 horas. Práctica 02 horas 1.9 : Análisis Matemático III : Análisis Matemático I y II, Física I y II, Análisis Vectorial. : DR. INGº SERBANDO SOPLOPUCO QUIROGA, PROFESOR PRINCIPAL, DE. II. SUMILLA La Asignatura de Dinámica es una asignatura teórica y práctica. El propósito de la asignatura es brindar al estudiante los conceptos básicos para poder evaluar los diferentes tipos de movimientos de una partícula, sistema de partículas o de un cuerpo rígido generados bajo la acción de una fuerza externa aplicada a dicha partícula, sistema de partículas o cuerpo rígido, conociendo así los efectos como son el desplazamiento, la velocidad, la aceleración y vibraciones de manera que se pueda desarrollar en las áreas científicas y tecnológicas. El desarrollo de la asignatura comprende: Cinemática de una partícula y de los cuerpos rígidos, dinámica de una partícula, de un sistema de partículas, de los cuerpos rígidos (ecuaciones de movimiento, trabajo y energía, impulso y moméntum), dinámica de los sistemas vibratorios. Aplicaciones. III. OBJETIVOS DE LA ASIGNATURA 3.1 Objetivos Generales: Al finalizar el dictado de la asignatura, el estudiante estará en condiciones de: 1. Determinar y evaluar los diferentes tipos de movimientos de una partícula, sistema de partículas y de un cuerpo rígido, sus velocidades y aceleraciones. 2. Analizar el movimiento vibratorio de un sistema masa-resorte, determinando las ecuaciones de movimiento, periodo de vibración, frecuencia angular, desplazamiento, entre otras propiedades. IV. PROGRAMACIÓN DE LOS CONTENIDOS 4.1 UNIDAD I: CINEMATICA DE UNA PARTICULA 4.1.1 Duración: Primera y Segunda Semana 4.1.2 Objetivos: a) Definir el estudio de la cinemática diferenciándolo de la cinética. b) Estudiar el movimiento de la partícula en diversos sistemas coordenados. c) Estudiar el movimiento relativo de dos partículas. d) Estudiar el movimiento relativo de una partícula con respecto a un sistema coordenado móvil. 4.1.3 Contenidos: 1.1 Movimiento de una partícula: desplazamiento, velocidad y aceleración 1.2 Movimiento de una recta: Desplazamiento angular, velocidad angular y aceleración angular. 1.3 Cinemática de una partícula en diversos sistemas de coordenadas: coordenadas cartesianas rectangulares, coordenadas normal y tangencial, coordenadas polares, coordenadas cilíndricas y coordenadas esféricas. 1.4 Movimiento relativo de dos partículas 1.5 Movimiento de una partícula con respecto a un sistema coordenado móvil (con traslación y rotación). 1.6 Ejercicios de Aplicación. 4.2 UNIDAD II: CINEMATICA DE LOS CUERPOS RIGIDOS 4.2.1 Duración: Tercera y Cuarta Semana 4.2.2 Objetivos: a) Definir el desplazamiento y los diversos tipos de movimiento de un cuerpo rígido. b) Establecer las ecuaciones generales de la cinemática de un cuerpo rígido. c) Estudiar la cinemática de los diversos tipos de movimiento de un cuerpo rígido. d) Estudiar el movimiento relativo de los cuerpos rígidos. e) Estudiar el movimiento relativo de un cuerpo rígido con respecto a un sistema coordenado móvil. 4.2.3 Contenidos: 2.1 Desplazamiento y diversos tipos de movimientos de un cuerpo rígido 2.2 Posición de un cuerpo rígido. 2.3 Cinemática de un cuerpo rígido. Ecuaciones Generales. 2.4 Cinemática de los diversos tipos de movimiento de un cuerpo rígido. 2.5 Movimiento relativo de los cuerpos rígidos. 2.6 Movimiento de un cuerpo rígido con respecto a un sistema coordenado móvil (con traslación y rotación). 2.7 Ejercicios de Aplicación. PRIMERA EXAMEN PARCIAL: 5ta. Semana. 4.3 UNIDAD III: DINÁMICA DE UNA PARTICULA 4.3.1 Duración: Quinta, Sexta, Séptima y Octava Semana 4.3.2 Objetivos: a) Establecer las ecuaciones de movimiento aplicando la Segunda Ley de Newton para el movimiento de una partícula. b) Establecer las ecuaciones de movimiento aplicando la Segunda Ley de Newton para el movimiento de una partícula para diversos sistemas coordenados. c) Estudiar y aplicar el Principio de D’Alembert. d) Estudiar el uso de las ecuaciones del Trabajo y Energía en sus diversas formas para solucionar problemas del movimiento de una partícula. e) Estudiar el uso de las ecuaciones del Impulso y Moméntum para solucionar problemas del movimiento de una partícula. 4.3.3 Contenidos: A. ECUACIONES DE MOVIMIENTO 3.1 Segunda Ley de Newton. Aplicaciones 3.2 Movimiento rectilíneo de una sola partícula. 3.3 Movimiento rectilíneo de varias partículas interconectadas. 3.4 Movimiento curvilíneo de una partícula: Caso General. 3.5 Principio de D´Alembert. 3.6 Ejercicios de aplicación. B. TRABAJO Y ENERGIA 3.7 Energía cinética de una partícula. 3.8 El trabajo realizado por una fuerza: forma 1 y forma 2. 3.9 El principio del trabajo y la energía. 3.10 Conservación de la energía: forma 3. 3.11 Ecuación de Lagrange para una partícula: forma 4. 3.12 Ejercicios de Aplicación C. IMPULSO Y MOMENTUM 3.13 Conceptos básicos de impulso lineal y moméntum lineal de una partícula. 3.14 Conservación del moméntum lineal 3.15 Momento y moméntum angular. 3.16 Ejercicios de Aplicación SEGUNDO EXAMEN PARCIAL: 8ª Semana. 4.4 UNIDAD IV: DINAMICA DE SISTEMA DE PARTICULAS 4.4.1 Duración: Novena y Décima Semana 4.4.2 Objetivos: a) Establecer las ecuaciones de movimiento para el movimiento de un sistema de partículas. b) Establecer las ecuaciones de movimiento para el movimiento del centro de masa de un sistema de partículas. c) Estudiar el uso de las ecuaciones del Trabajo y Energía en sus diversa formas para solucionar problemas del movimiento de un sistema de partículas. d) Estudiar el uso de las ecuaciones del Impulso y Moméntum para solucionar problemas del movimiento de un sistema de partículas. 4.4.3 Contenidos: A. 4.1 4.2 B. 4.3 4.4 4.5 C. 4.6 4.7 4.8 4.9 4.10 4.11 4.12 4.13 ECUACIONES DE MOVIMIENTO Ecuaciones de movimiento para un sistema de partículas. Ecuaciones de movimiento para el centro de masa de un sistema de partículas. TRABAJO Y ENERGIA Energía cinética de un sistema de partículas. Ecuación del trabajo y la energía para un sistema de partículas. Ecuación de Lagrange para un sistema de partículas. IMPULSO Y MOMENTUM Impulso lineal y moméntum lineal para un sistema de partículas. Impulso lineal y moméntum lineal para el centro de masa de un sistema de partículas. Conservación del moméntum lineal para un sistema de partículas. Moméntum angular para un sistema de partículas Momento y moméntum angular. Impulso angular y moméntum angular. Conservación del moméntum angular para un sistema de partículas. Ejercicios de Aplicación 4.5 UNIDAD V: DINAMICA DE UN CUERPO RIGIDO 4.5.1 Duración: Undécima, Duodécima y Décimo Tercera Semana 4.5.2 Objetivos: a) Establecer las propiedades dinámicas de los cuerpos rígidos b) Establecer las ecuaciones de movimiento para los diversos tipos de movimiento de un cuerpo rígido. c) Estudiar y aplicar el Principio de D’Alembert. d) Estudiar el uso de las ecuaciones del Trabajo y Energía en sus diversas formas para solucionar problemas del movimiento de un cuerpo rígido. e) Estudiar el uso de las ecuaciones del Impulso y Moméntum para solucionar problemas del movimiento de un cuerpo rígido. 4.5.3 Contenidos: A. ECUACIONES DE MOVIMIENTO 5.1 Propiedades dinámicas de los cuerpos rígidos: momentos y productos de inercia de masas. 5.2 Momento angular de un cuerpo rígido. 5.3 Ecuación de movimiento de un cuerpo rígido. 5.4 Ecuaciones de movimiento para varios tipos de movimiento de un cuerpo rígido. 5.5 Principio de D´Alembert. 5.6 Ejercicios de aplicación. B. TRABAJO Y ENERGIA 5.7 Energía cinética para un cuerpo rígido. 5.8 Ecuación del trabajo y energía para un cuerpo rígido: Formas 1, 2 y 3. 5.9 Ecuación de Lagrange para cuerpos rígidos. 5.10 Ejercicios de Aplicación. C. IMPULSO Y MOMENTUM 5.11 Impulso angular y moméntum angular de un cuerpo rígido. 5.12 Conservación del moméntum angular de un cuerpo rígido. 5.13 Ejercicios de Aplicación. TERCER EXAMEN PARCIAL: 13ma. Semana. 4.6 UNIDAD VI: DINAMICA DE LOS SISTEMAS VIBRATORIOS 4.6.1 Duración: Décimo Cuarta, Décimo Quinta y Décimo Sexta Semana. 4.6.2 Objetivos: a) Establecer los conceptos básicos relacionados con la dinámica de los sistemas vibratorios. b) Establecer las ecuaciones de movimiento para los diversos tipos de Vibraciones. c) Estudiar y aplicar cada uno de los tipos de Vibración de una partícula. d) Estudiar y aplicar cada uno de los tipos de Vibración de un sistema de partículas. e) Estudiar y aplicar cada uno de los tipos de Vibración de un cuerpo rígido. f) Determinar las frecuencias y periodos de vibración para cada tipo de vibración. 4.6.3 Contenidos: 6.1 Vibración: Conceptos básicos. 6.2 Vibración Libre. 6.3 Vibración Forzada. 6.4 Vibración libre amortiguada. 6.5 Vibración forzada amortiguada. 6.6 Vibración de varias partículas conectadas y cuerpos rígidos. 6.7 Ejercicios de Aplicación. CUARTO EXAMEN PARCIAL: 16ta. Semana. PUBLICACION DE RESULTADOS y ENTREGA DE ACTAS: 17ma. Semana. V. VI. ESTRATEGIAS METODOLOGICAS Para el desarrollo de la Asignatura y lograr los objetivos propuestos, seguiremos la siguiente metodología: a) Los temas serán explicados y dialogados con la participación del estudiante. b) Se desarrollarán ejercicios de aplicación dirigidos por el docente, y ejercicios de entrenamiento por parte de los estudiantes. c) Se rendirá un mínimo de CUATRO (04) Exámenes Parciales. La no asistencia a un examen será calificada con nota cero (0). d) Se efectuará una visita de campo a estructuras especiales ubicadas en la Región San Martín, siempre que la UNSM de las facilidades, elaborándose el Informe de visita de campo. e) Se dejará tareas de entrenamiento sobre problemas relacionados con las Unidades desarrolladas con puntuación favorable al buen desempeño. SISTEMA DE EVALUACION 6.1 Asistencia: mínimo 70%, según Reglamento. La asistencia menor del 70% se computa para cada periodo de evaluaciones y descalifica para rendir dichas evaluaciones, correspondiendo la nota cero (00). 6.2 Las calificaciones serán de cero (00) a veinte (20). 6.3 Los Exámenes Parciales habilitados tendrán un promedio. Los ejercicios de entrenamiento, según cumplimiento y los informes de la visita de campo tendrán calificación adicional favorable a los alumnos, correspondiendo a una nota promedio. 6.4 La Nota Final mínima promedio es de 10.5, que se obtendrá del promedio de los exámenes parciales más la nota de calificación adicional promedio (informe de visita de campo y ejercicios de entrenamiento válidos), según la fórmula: N. F. = (ΣEP + PC)/5 ≥ 10.5 Donde: ΣEP = Sumatoria de Exámenes Parciales. PC = Promedio de Calificaciones por Trabajos Encargados, Ejercicios de Entrenamiento y Otros. 6.5 No habrá examen sustitutorio. Si un alumno sale desaprobado, se tomará Examen de Aplazados. Para rendir este último, el alumno deberá tener nota final y haber asistido a clases un promedio de 70% en el ciclo. El profesor se ampara en el principio de Libertad de Cátedra (Art.18° de la Constitución Política del Perú, considerado en el Art. 51° de la Ley N° 23733 y remarcado en el Art. 170° inciso b) del Estatuto de la UNSM-T). La rendición de exámenes no modificará el calendario establecido. VII. BIBLIOGRAFÍA 1. BEER, FERDINAN P., y JOHNSTON, E. RUSSEL, 1994, Mecánica Vectorial para IngenierosDinámica, Editorial Mc Graw Hill, Cuarta edición, tercera reimpresión, México. 2. BORESI, ARTHUR P., SCHMIDT, RICHARD J., 2002, Dinámica, Editorial Thompson Learning, Primera edición, México, D.F. 3. DAS, KASSIMALI/SAMI, 1994, Mecánica para Ingenieros Dinámica, Editorial LIMUSA Noriega Editores, Primera edición, México. 4. DÍAZ MOSTO, JORGE, 1995, Mecánica Racional, Dinámica, Editorial de Libros Técnicos “ELITE”, Lima. 5. HIBBELER, R.C., 1995, Ingeniería Mecánica, Dinámica, Editorial Prentice Hall, Séptima edición, México. 6. HUANG, T.C., 1992, Mecánica Vectorial para Ingenieros, Dinámica, Editorial Fondo Educativo Interamericano, primera edición, cuarta reimpresión, México. 7. MERIAM, J. I., 1990, Dinámica, Editorial Reverté S.A., segunda edición, segunda reimpresión Barcelona. 8. NARA R., HARRY, 1991, Mecánica Vectorial para Ingenieros, Vol. II Dinámica, Editorial LIMUSA, primera edición, octava reimpresión, México. 9. RILEY, WILLIAM F., STURGES, LEROY D., 2001, Ingeniería Mecánica Dinámica, Editorial Reverté S.A., Primera Edición Barcelona, España. 10. SINGER, FERDINAND L., 1991, Mecánica para Ingenieros: Dinámica, Editorial Harla, Tercera edición, segunda reimpresión, México. Tarapoto, MARZO del 2011. DR., INGº SERBANDO SOPLOPUCO QUIROGA Profesor de la Asignatura