Mecánica II Tema 5 Introducción a la dinámica anal´ıtica
Anuncio

Mecánica II
Tema 5
Introducción a la dinámica analı́tica
Manuel Ruiz Delgado
9 de marzo de 2011
Sistemas materiales . . . . . . . . . . . . . . . . .
Ligaduras: Clasificación. . . . . . . . . . . . . . .
Ligaduras finitas: f (r1 , r2 , . . . , rN , t) = 0 . .
Ligaduras independientes: Jacobiano. . . . . .
Ligaduras unilaterales/bilaterales . . . . . . . .
Ligaduras finitas → cinemáticas . . . . . . . .
Ligaduras cinemáticas no integrables . . . . .
Ligadura cinemática integrable. . . . . . . . . .
Ligadura cinemática no integrable . . . . . . .
Coordenadas generalizadas . . . . . . . . . . . .
Coordenadas generalizadas: sist. holónomos .
Coordenadas generalizadas: No holónomos .
Espacio de configuración. . . . . . . . . . . . . .
Desplazamientos virtuales . . . . . . . . . . . . .
Desplazamientos posibles (sist. holónomo). .
Desplazamientos virtuales/posibles . . . . . . .
DVCL . . . . . . . . . . . . . . . . . . . . . . . . . .
DVCL para un sólido . . . . . . . . . . . . . . . .
Fuerzas de ligadura . . . . . . . . . . . . . . . . .
Trabajo virtual . . . . . . . . . . . . . . . . . . . .
Ligaduras ideales . . . . . . . . . . . . . . . . . . .
Comentarios sobre ligaduras ideales . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
1
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
2
3
4
5
8
9
11
13
14
17
18
22
23
24
25
26
28
29
30
31
32
40
Sistemas materiales
Sistema formado por N partı́culas materiales sujetas a ligaduras
• 3N coordenadas: (x1 , y1 , z1 , . . . , xN , yN , zN )
• g ligaduras independientes
• n = 3N − g grados de libertad (GDL)
Mecánica Newtoniana: introducir incógnitas/ecuaciones de ligadura
• 3N + g ecuaciones
3N + g
• 3N + g incógnitas
Mecánica Analı́tica: 1 ecuación para cada grado de libertad
• 3N − g ecuaciones
3N − g
3N
• 3N − g incógnitas
Superficie: proyectar sobre el plano tangente
Curva: proyectar sobre la tangente
g
Manuel Ruiz - Mecánica II
2 / 40
Ligaduras: Clasificación
Ligadura
Descripción
Finita/geométrica
f (ri , t) = 0
P
Ai · vi + D = 0
Cinemática
• integrable
• no integrable
Estacionaria
Sistema
Holónomo
d
= dt
f (ri , t)
d
6= dt
f (ri , t)
No Holónomo
f (ri ) = 0
Esclerónomo
Ai (ri ) · vi = 0
No estacionaria
f (ri , t) = 0
Reónomo
Ai (ri , t) · vi + D(ri , t) = 0
Bilateral
f (ri , t)=0
Actúa siempre
Unilateral
f (ri , t)≥0
Libre/ligado
Manuel Ruiz - Mecánica II
3 / 40
2
Ligaduras finitas: f (r1 , r2 , . . . , rN , t) = 0
Partı́cula sobre superficie esférica: N = 1; coordenadas: 3N ; ligaduras: g = 1; GDL:
n = 3N − g = 2
Esfera fija: f (r) ≡ x2 + y 2 + z 2 − R2 = 0
Globo esférico:
f (r, t) ≡ x2 + y 2 + z 2 − R(t)2 = 0
Dos partı́culas unidas por una barra: N = 2; coordenadas: 3N ; ligaduras: g = 1; GDL:
n = 3N − g = 5
f (r1 , r2 ) ≡ (y1 − y2 )2 + (z1 − z2 )2 + (x1 − x2 )2 − L2 = 0
Si la barra es telescópica:
f (r1 , r2 , t) ≡ (y1 − y2 )2 + (z1 − z2 )2 + (x1 − x2 )2 − L(t)2 = 0
N partı́culas ensartadas en un hilo de longitud L (GDL=3N − 1)
f (r1 . . . rN ) ≡
N
−1
X
(ri − ri+1 )2 − L2 = 0
i=1
Manuel Ruiz - Mecánica II
4 / 40
Ligaduras independientes: Jacobiano
g ligaduras independientes: Jacobiano [∂fi /∂xj ] rango =g
g ligaduras redundantes: Jacobiano [∂fi /∂xj ] rango <g
Ej.: Partı́cula sujeta a tres ligaduras:
Esfera de centro el origen: f1 ≡ x2 + y 2 + z 2 − R2 = 0
Plano horizontal: f2 ≡ z = 0
Cilindro vertical: f3 ≡ x2 + y 2 − R2 = 0
La tercera ligadura es redundante:
2
x + y 2 + z 2 − R 2
f=
z
2
x + y 2 − R2
2x 2y 2z
J=0 0 1
2x 2y 0
Manuel Ruiz - Mecánica II
Rango (JJ) = 2
5 / 40
3
Ligaduras independientes: Jacobiano
Ej.: Dos partı́culas (N = 2) en el plano (2N en vez de 3N ) sujetas a:
1
f1 ≡ (x2 − x1 )2 + (y2 − y1 )2 − 4R2 = 0
f2 ≡ y2 = 0
f3 ≡ x21 + (y1 − R)2 − R2 = 0
2
GDL: n = 2N − g = 4 − 3 = 1. Calculamos el jacobiano:
−2 (x2 − x1 ) −2 (y2 − y1 ) 2 (x2 − x1 ) 2 (y2 − y1 )
0
0
0
1
J=
2x1
2 (y1 − R)
0
0
Obviamente, Rango(JJ) = 3
⇒
independientes
Manuel Ruiz - Mecánica II
6 / 40
Ligaduras independientes: Jacobiano
Son independientes en general
Pero pueden hacerse redundantes en algunos puntos:
Si colocamos la varilla vertical, x1 = x2 = 0, y1 = 2R, el jacobiano se reduce a:
0 4R 0 −4R
J = 0 0 0
1
0 2R 0
0
Obviamente, en este caso Rango(JJ) = 2
⇒
redundantes.
1
2
Manuel Ruiz - Mecánica II
7 / 40
4
Ligaduras unilaterales/bilaterales
z≥0
z=0
Ligadas (=)
Libres (<)
|r1 − r2 | = L
|r1 − r2 | < L
Integrar las ecuaciones con ligadura
Controlar el signo de N para comprobar cuándo se separa
Integrar las ecuaciones sin ligadura con las condiciones iniciales de la separación
Controlar cuándo vuelve a cumplirse . . . percusiones . . . y ası́ sucesivamente
Manuel Ruiz - Mecánica II
8 / 40
Ligaduras finitas → cinemáticas
Toda limitación de las ri limita también las vi
f (ri , t) = 0
⇒
d
f (ri , t) = 0
dt
∂f
∂f
∂f
∂f
∂f
ẋ1 +
ẏ1 + · · · +
ẏN +
żN +
=
∂x1
∂y1
∂yN
∂zN
∂t
= ∇1 f · ṙ1 + · · · + ∇N f · ṙN +
N
X
∂f
=
Ai · vi + B = 0
∂t
i=1
∂f
f ≡ z − h = 0 ⇒ ∇f · v + = 0 ⇒ ż = 0
∂t
Ascensor: sistema reónomo z − h(t) = 0
∇f
v
f˙ ≡ ż − ḣ = 0 ⇒ ∇f · v + ft = 0 ⇒ vn = ż = −ft / |∇f |
Manuel Ruiz - Mecánica II
9 / 40
5
Ligaduras finitas → cinemáticas
Partı́cula sobre superficie esférica: f ≡ x2 + y 2 + z 2 − R2 = 0.
∇f · v = 0 ⇒ 2xẋ + 2y ẏ + 2z ż = 0
∇f
∇f = (2x, 2y, 2z) k ur , la velocidad es tangente a la superficie.
Si la ligadura fuera no estacionaria —por ejemplo, un globo que se
hincha— la velocidad no es tangente:
v
f (r, t) ≡ x2 + y 2 + z 2 − R(t)2 = 0
ft
∇f · v + ft = 0 ⇒ vn = −
= Ṙ
|∇f |
Manuel Ruiz - Mecánica II
10 / 40
Ligaduras cinemáticas no integrables
Hay ligaduras cinemáticas que no son la derivada de una finita:
g (ri , vi , t) ≡
N
X
Ai (ri , t) · vi + B(ri , t) = 0
i=1
∄ f (ri , t) / g (ri , vi , t) =
d
f (ri , t)
dt
Todas finitas o cinemáticas integrables → Sistema holónomo
Al menos 1 cinemática no integrable → Sistema no holónomo
Las ligaduras finitas se puede usar para despejar coordenadas y dejar sólo las independientes
(3N − g = n)
Las cinemáticas no sirven, pues aparecen las velocidades
Si son integrables, se integran → reducir coordenadas
En los sistemas no holónomos no es posible reducir el número de ecuaciones al mı́nimo
Manuel Ruiz - Mecánica II
11 / 40
6
Ligaduras cinemáticas no integrables
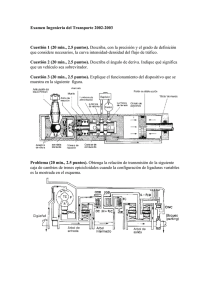
No integrable: Patı́n / Esquı́ / Rueda /Patı́n de hielo. Sólo puede moverse en la dirección de la
cuchilla. No impone condiciones a las coordenadas: puede ponerse en cualquier punto y orientarse en
cualquier dirección.
A
A · v = (− sin θ, cos θ) · (ẋ, ẏ) =
(ẋ, ẏ)
= − sin θ ẋ + cos θ ẏ = 0
• No integrable: 1 ec., 3 v.d.(x, y, θ), 1 v.i. (t). Aunque se tomara
la θ como v. i., dividiendo por θ̇, seguirı́a sin poderse integrar.
θ
• Sólido libre en el plano: 3 GDL, x, y, θ. Con ligadura cinemática: n = 3 − 1 = 2 GDL.
• Análogo al de un automóvil o una bicicleta: 2 GDL dirección (manillar/volante) y el avance
(pedales/motor).
Manuel Ruiz - Mecánica II
12 / 40
Ligadura cinemática integrable
Integrable: Rodadura sin deslizamiento en el plano:
vI = vC + ω ∧ CI = ẋ − Rθ̇ i + ẏ j = 0
• Ligadura integrable según y:
I
g1 ≡ A1 · v21
+ B1 =
C
=j
I
· v21
+ 0 = ẏ = 0
⇒
y=R
Rθ̇
θ
• Ligadura integrable según x:
g2 ≡
I
A2 · v21
+ B2
=
I
i · v21
+0
= ẋ − Rθ̇ = 0 ⇒ x = Rθ + Cte.
O
x
I
• De las tres coordenadas, sólo queda una independiente: x ó θ, pues sólo hay un grado de libertad:
n = 3 − 2.
Manuel Ruiz - Mecánica II
13 / 40
7
Ligadura cinemática no integrable
z1
z0
No integrable: Disco que rueda sin deslizar sobre
un plano ⊥.
(⊥→ θ = π2 Lig. finita)
ϕ
C
I
C
v21
= v21
+ ω 21 ∧ CI = 0 =
i0 j0 k0 ẋ
+ 0 ϕ̇ ψ̇ =
= ẏ
ż 1 0 0 −R
y0
ψ
y1
I
x1
ẋ − Rϕ̇ cos ψ
ẋ cos ψ + ẏ sin ψ − Rϕ̇
0
= ẏ − Rϕ̇ sin ψ
=
−ẋ sin ψ + ẏ cos ψ
= 0
ż
ż
0
1
0
I
I
g1 ≡ i0 · v21
ĝ1 ≡ i1 · v21
g1
ĝ1
I
I
g2 ≡ j0 · v21
ĝ2 ≡ j1 · v21
ĝ
= Q 10 · g2
2
I
I
g3 ≡ k0 · v21
ĝ3 ≡ k1 · v21
ĝ3
g3
x0
Manuel Ruiz - Mecánica II
14 / 40
Ligadura cinemática no integrable
z1
z0
ϕ
• La ligadura de z es integrable: el disco no se levanta del suelo:
I
I
g3 ≡ k0 · v21
= ĝ3 ≡ k1 · v21
=
C
= ż = 0
⇒
y0
z=R
ψ
• Las de x e y no son integrables:
y1
I
x1
x0
I
g1 ≡ i0 · v21
= ẋ cos ψ + ẏ sin ψ − Rϕ̇ = 0;
I
g2 ≡ j0 · v21
= −ẋ sin ψ + ẏ cos ψ = 0
• Proyectadas en ejes 1
2 Ecs, 4 Var. Dep, 1 Var. Indep.
I
ĝ1 ≡ i1 · v21
= ẋ − Rϕ̇ cos ψ = 0;
I
ĝ2 ≡ j1 · v21
= ẏ − Rϕ̇ sin ψ = 0
Manuel Ruiz - Mecánica II
15 / 40
8
Ligadura cinemática no integrable
y1
(ẋ, ẏ)
ϕ
s
p
ψ
ĝ12 + ĝ22 ≡ ṡ = Rϕ̇ → s = Rϕ + C :
ĝ2 /ĝ1 ≡
dy
dx
= tan ψ :
x1
Rueda sin deslizar
dirección de la rueda: ¡libre!
No puede integrarse: ψ no está determinado por la ligadura
(si no, el recorrido del coche estarı́a fijado antes de arrancar)
Está determinado si se da una ley ψ(s) → fijar la trayectoria
Manuel Ruiz - Mecánica II
16 / 40
Coordenadas generalizadas
N partı́culas, g ligaduras → sólo n = 3N − g coordenadas independientes
Sistema holónomo: las ligaduras se usan para eliminar las dependientes
Sistema no holónomo: no se pueden usar las ligaduras no integrables para eliminar las
dependientes
Partı́cula sobre esfera lisa: f (r) ≡ x2 + y 2 + z 2 − R2 = 0
Sistema holónomo, GDL = n = 3 · 1 − 1 = 2.
p
Eliminar una: z = ± R2 − x2 − y 2 ; (x, y) independientes
Compleja e incómoda: raı́z, no uniforme.
Mejor coordenadas esféricas:
ligadura
independientes
z p
}|
{
2
2
2
ρ= x +y +z =R
z
}|
{
y
z
tan θ =
sin ϕ =
x
R
Manuel Ruiz - Mecánica II
17 / 40
9
Coordenadas generalizadas: sist. holónomos
N partı́culas, g ligaduras finitas: n = 3N − g independientes.
Sin pérdida de generalidad, se puede suponer que las independientes son las n primeras,
g
n
z
}|
{ z
}|
{
x1 , y1 , z1 , x2 , . . . , xk , yk , zk , . . . , xN , yN , zN
|
{z
}
3N
La configuración del sistema se puede expresar como:
ri = ri (x1 , y1 , z1 . . . xk , t) ,
i = 1...N
yk , zk , . . . xN , yN , zN salen de las ecuaciones de las ligaduras.
Olvidamos las ligaduras: ya están contadas al sustituir yk (x1 . . . xk , t). . .
Manuel Ruiz - Mecánica II
18 / 40
Coordenadas generalizadas: sist. holónomos
Se puede trabajar con las coordenadas cartesianas independientes (para sólidos, también ángulos
de Euler)
ri = ri (x1 , y1 , z1 . . . xk , t) , i = 1 . . . N
Con frecuencia es más cómodo usar otros n parámetros independientes, las coordenadas
generalizadas:
ri = ri (q1 , . . . , qn , t) , i = 1 . . . N
Tienen que estar relacionadas como cambio de variable:
∂ (x1 , y1 , . . . , xk ) ∂ (q1 , q2 , . . . , qn ) 6= 0
(puede haber puntos singulares, como los polos en las esféricas)
El movimiento del sistema estará perfectamente determinado cuando se conozcan
q1 (t), . . . , qn (t).
Manuel Ruiz - Mecánica II
19 / 40
10
Coordenadas generalizadas: sist. holónomos
Ejemplo: Dos partı́culas 1 y 2. Coordenadas: x1 , y1 , z1 , x2 , y2 , z2 .
2
z
3 Ligaduras:
y1 = 0
y2 = 0
(x1 − x2
y2
1
)2
+ (y1 − y2
)2
+ (z1 − z2
)2
=
L2
z1
Escoger 3 coordenadas independientes:
x1
x2
x
Dos determinadas directamente por las ligaduras y1 = 0, y2 = 0.
De las otras cuatro, se puede despejar una, por ejemplo:
p
z2 = z1 ± L2 − (x2 − x1 )2
Raı́z molesta. No uniforme: hay que distinguir qué signo tomar
x1 , z1 arbitrarias; x2 limitada por la ligadura
Manuel Ruiz - Mecánica II
20 / 40
Coordenadas generalizadas: sist. holónomos
Es más conveniente tomar un conjunto de coordenadas generalizadas:
2
z
q 1 = x1
q2 = y1
θ
1
q3 = θ
z1
Las coordenadas de 1 y 2 pasan a ser:
r1 = (x1 , 0, z1 ),
x1
r2 = (x1 + L cos θ, 0, z1 + L sin θ)
Las tres pueden tomar valores arbitrarios, y las ri
que el jacobiano es distinto de cero:
∂ (x1 , y1 , x2 ) 1
∂ (x1 , y1 , θ) = 0
1
Manuel Ruiz - Mecánica II
x
están unı́vocamente definidas. Se puede comprobar
0
0
= −L sin θ
1
0
0 −L sin θ
11
21 / 40
Coordenadas generalizadas: No holónomos
Sistema con N partı́culas
Sujeto a g ligaduras finitas o cinemáticas integrables (integradas)
fj (ri , t) = 0,
j = 1...g
Sujeto a h ligaduras cinemáticas no integrables
N
X
Aik · vi + B = 0,
k = 1...h
i=1
n grados de libertad GDL = 3N − g − h = n
Pero no se pueden obtener n coordenadas generalizadas: las h ligaduras cinemáticas no sirven
para reducir coordenadas
Hay que usar m = 3N − g > GDL coordenadas generalizadas no independientes
Manuel Ruiz - Mecánica II
22 / 40
Espacio de configuración
Espacio euclı́deo R3 : N partı́culas libres ri ∈ R3 , i = 1 . . . N
Espacio de configuración R3N : Punto representativo del sistema:
R = (x1 , y1 , z1 . . . , xN , yN , zN ) ∈ R3N
Variedad de configuración: Sistema sujeto a g ligaduras finitas
fj (ri , t) = 0,
j = 1, . . . , g
Ecuaciones implı́citas de una variedad (dim n) inmersa en R3N
Espacio de configuración (otra acepción) Rn : n = 3N − g coordenadas generalizadas. Punto
representativo del sistema:
R = (q1 , . . . , qn ) ∈ Rn
Ecuaciones paramétricas de la variedad de configuración
Manuel Ruiz - Mecánica II
23 / 40
12
Desplazamientos virtuales
Desplazamiento virtual: cualquier variación arbitraria de las coordenadas de un punto (o de
todos los del sistema).
δri = (δxi , δyi , δzi ) , i = 1, . . . , N
Velocidad virtual: si el desplazamiento virtual δri se realiza en un tiempo δt, definimos
vi =
δri
,
δt
i = 1, . . . , N
Los DV son arbitrarios: en general no cumplirán las ligaduras
• Esfera: δx, δy, δz no cumplen δf ≡ 2xδx + 2yδy + 2zδz = 0
• Varilla: δx1 , δy1 , δz1 , δx2 , δy2 , δz2 no cumplirán la condición
δf ≡ 2 (x1 − x2 ) δx1 + 2 (y1 − y2 ) δy1 + 2 (z1 − z2 ) δz1 −
− 2 (x1 − x2 ) δx2 − 2 (y1 − y2 ) δy2 − 2 (z1 − z2 ) δz2 = 0
Manuel Ruiz - Mecánica II
24 / 40
Desplazamientos posibles (sist. holónomo)
Si hay ligaduras finitas, un δri arbitrario no las respetará. Introduciendo coordenadas
generalizadas, sı́ se cumplen
x1 , y1 z1 . . . , xN , yN , zN ,
xi no arbitrarias
ri = ri (q1 , . . . , qn , t)
qj arbitrarias
desplazamientos posibles: arbitrarios, cumplen las ligaduras
dri =
n
X
∂ri
∂ri
dqj +
dt,
∂qj
∂t
donde: dqj = q̇j dt arbitrarias
j=1
velocidades posibles: si el desplazamiento se da en δt
n
X
∂ri
∂ri
ṙi =
q̇j +
∂qj
∂t
j=1
Los reales ∈ posibles, dependiendo de las fuerzas y C.I.
No holónomo: condiciones adicionales a los q̇j y dqj
Manuel Ruiz - Mecánica II
25 / 40
13
Desplazamientos virtuales/posibles
Ejemplo: Partı́cula sobre esfera lisa: f ≡ x2 + y 2 + z 2 − R2 = 0
Cualquier desplazamiento tiene que cumplir la ligadura:
δf ≡ 2xδx + 2yδy + 2zδz = 0
Desplazamientos virtuales (≡ arbitrarios):
(δx, δy, δz)
No cumplen la ligadura
Para que la ligadura se cumpla automáticamente, introducimos coordenadas generalizadas
(esféricas):
r = R (cos ϕ cos θ, cos ϕ sin θ, sin ϕ)
Ahora, cualquier valor de dθ, dϕ cumple la ligadura.
Desplazamientos posibles:
dr =
∂r
∂r
dθ +
dϕ =
∂θ
∂ϕ
− cos ϕ sin θ
− sin ϕ cos θ
= R uθ dθ + R uϕ dϕ = R cos ϕ cos θ dθ + R − sin ϕ sin θ dϕ
0
cos ϕ
Manuel Ruiz - Mecánica II
26 / 40
Desplazamientos posibles
Ejemplo: dos partı́culas unidas por una barra telescópica
Ldθ
L̇dt
dz1
r1 = (x1 , 0, z1 )
r2 = (x1 + L(t) cos θ, 0, z1 + L(t) sin θ)
1
0
dr1 = 0 dx1 + 0 dz1
0
1
1
0
−L sin θ
L̇ cos θ
0
0
dr2 = 0 dx1 + 0 dz1 +
dθ +
dt
0
1
L cos θ
L̇ sin θ
Manuel Ruiz - Mecánica II
dx1
27 / 40
14
DVCL
Desplazamientos virtuales compatibles con las ligaduras (DVCL): los desplazamientos
posibles con las ligaduras congeladas o bloqueadas:
n
X
∂ri
∂ri
δrVi CL =
δqj +
δt
∂qj
∂t
j=1
∂ri
ligadura congelada:
= 0, t = Cte. (cinemáticas: B=ft=0)
∂t
r = (x, y, vt)
δrV CL
drpos
δrV CL
v dt
drpos = (dx, dy, v dt)
δrV CL = (δx, δy, 0)
Manuel Ruiz - Mecánica II
28 / 40
DVCL para un sólido
Un sólido se puede considerar como un sistema de N puntos sujetos a 3N − 6 ligaduras finitas, de
modo que le quedan 6 GDL: 3 coordenadas de un punto O y 3 parámetros de actitud, por ejemplo los
ángulos de Euler:
ri = rO + Q (ψ, θ, ϕ) · OMi
Al introducir estas coordenadas, cualquier δri es DVCL. Es más fácil hacerlo a partir de las
velocidades que diferenciar la matriz de giro:
δri = vO + ω ∧ OMi dt = δrO + ω dt ∧ OMi
0
cos ψ
sin θ sin ψ
Como
ω = 0 ψ̇ + sin ψ θ̇ + − sin θ cos ψ ϕ̇ = k1 ψ̇ + uN θ̇ + k0 ϕ̇
1
0
cos θ
queda
δri = i δx + j δy + k δz + k1 ∧ OMi δψ + uN ∧ OMi δθ + k0 ∧ OMi δϕ
Manuel Ruiz - Mecánica II
29 / 40
15
Fuerzas de ligadura
Fuerzas dadas o directamente aplicadas:
Fi (rj , vj , t)
Fuerzas de inercia: dependen del movimiento de S0
Fuerzas de ligadura:
• Desconocidas a priori: incógnita del problema
• La necesaria para hacer cumplir la ligadura
• Parcialmente conocida (dirección, por ejemplo)
Ej: Plano f ≡ z = h → FL = λ k = λ ∇f
Ej: Esfera f ≡ r2 = R2 → FL = λ r = λ ∇f /2
Ej: Dos partı́culas unidas por una barra o hilo:
2
FL
1
FL
2
M2
L2
f ≡ (r1 − r2 ) =
= λ (r1 − r2 ) = λ ∇1 f /2
= −λ (r1 − r2 ) = λ ∇2 f /2
FL
1
FL
2
M1
λ es la misma para las dos partı́culas (acción-reacción)
Manuel Ruiz - Mecánica II
30 / 40
Trabajo virtual
Trabajo virtual δW es el que realiza una fuerza en un desplazamiento virtual del punto en que
está aplicada. El trabajo virtual de todas las fuerzas que actúan sobre un sistema será:
δW =
N
X
i=1
L
FD
i + Fi · δri
Las fuerzas se consideran constantes en el desplazamiento virtual (por eso a veces se considera
infinitésimo)
Cuando δr se realiza en un tiempo dado δt, se puede hablar también de potencia virtual.
P =
N
X
i=1
L
FD
i + Fi · ṙi
Manuel Ruiz - Mecánica II
31 / 40
16
Ligaduras ideales
Ligaduras ideales o ligaduras sin rozamiento son aquellas en que el trabajo virtual de las
fuerzas de ligadura es nulo en cualquier desplazamiento virtual compatible con las ligaduras.
Condición para los DVCL (con esta ligadura):
f1 (r1 , . . . , rN , t) = 0 →
→
∂f1
∂f1
∂f1
δx1 +
δy1 + · · · +
δzN = 0 →
∂x1
∂y1
∂zN
→ ∇1 f1 · δr1 + · · · + ∇N f1 · δrN = 0
Trabajo virtual de las fuerzas de esta ligadura:
L1
1
δW L1 = FL
1 · δr1 + · · · + FN · δrN
Para relacionarlos: N vectores de R3
⇔
1 vector de R3N
Manuel Ruiz - Mecánica II
32 / 40
Ligaduras ideales
δR = (δx1 , δy1 , δz1 , . . . , δxN , δyN , δzN )
L
FL = Fx1
, FyL1 , FzL1 , . . . , FxLN , FyLN , FzLN
∂f ∂f ∂f
∂f ∂f ∂f
G=
,
,
,...,
,
,
∂x1 ∂y1 ∂z1
∂xN ∂yN ∂zN
FL
G
δR
Ec. Ligadura:
Trabajo nulo:
δR ⊥ FL
δR
δR · G = 0 ⇒ δR ⊥ G
δW = FL · δR = 0 ⇒ δR ⊥ FL
∀ δR / δR ⊥ G
⇒
Manuel Ruiz - Mecánica II
FL = λG
(Dim. finita)
33 / 40
17
Ligaduras ideales
Demostración por reducción al absurdo:
• Tómese G como base del subespacio unidimensional G de R3N .
• Sea G⊥ el suplementario ortogonal de G: G ⊕ G⊥ = R3N .
• Cualquier desplazamiento virtual compatible con la ligadura será normal a G, por lo que δR ∈ G⊥ .
• Supongamos que la ligadura es ideal, pero FL 6= λG; entonces se podrá descomponer en dos
vectores ortogonales FL = λG + F⊥ , de modo que F⊥ ∈ G⊥ .
• Basta con tomar δR = ǫ F⊥ , que es un desplazamiento virtual compatible con la ligadura por ser
ortogonal a G. El trabajo virtual de la fuerza de ligadura serı́a δW = δR · FL = ǫ F⊥ · F⊥ 6= 0 en
contra de la hipótesis.
• Por tanto, F⊥ = 0 y FL = λ G,
Q.E.D.
Manuel Ruiz - Mecánica II
34 / 40
Ligaduras ideales
Fuerza sobre la partı́cula i debida a una ligadura finita:
∂f ∂f ∂f
L
Fi = λ
,
,
= λ∇i f
∂xi ∂yi ∂zi
Fuerza sobre la partı́cula i debida a g ligaduras finitas:
g
X
L
Fi =
λj ∇i fj
j=1
h Ligaduras cinemáticas: f (ri , t) ⇔
N
X
Pn
i=1
Aki · vi + Bk = 0 ⇒
i=1
∇i f · vi + ft = 0
N
X
Aki · δri = 0;
k = 1, . . . , h
i=1
Usando el mismo razonamiento que con las finitas:
FL
i
=
g
X
λj ∇i fj +
j=1
h
X
µk Aik
k=1
Manuel Ruiz - Mecánica II
35 / 40
18
Ligaduras ideales
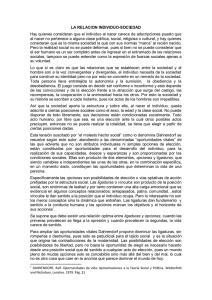
Ejemplo: Patı́n. Hemos visto que el patı́n (o la rueda delantera de un triciclo) está sometido a una
ligadura cinemática no integrable: el centro se tiene que mover en la dirección del patı́n.
La ecuación de la ligadura es:
A · v = (− sin θ, cos θ) · (ẋ, ẏ) = − sin θ ẋ + cos θ ẏ = 0
FL
v
La fuerza de ligadura tendrá la forma
A
FL = µ A = µ (− sin θ, cos θ)
θ
µ es una incógnita que dependerá de las fuerzas que actúen sobre el patı́n y de su aceleración.
Manuel Ruiz - Mecánica II
36 / 40
Ligaduras ideales
I = 0 . Habrá tres componentes de
Rodadura sin deslizamiento. Tres ligaduras cinemáticas v21
fuerzas de ligadura:
z1
I =0
z0
g1 ≡ i0 · v21
→ FL
=
µ
i
1
0
1
I =0
ϕ
g2 ≡ j0 · v21
→ FL
=
µ
j
2 0
2
I = 0 → FL = µ k
g3 ≡ k0 · v21
3 0
3
que podemos también proyectar en ejes S1 :
C
y0
FL
2
I =0
ĝ1 ≡ i1 · v21
→ F̂L
1 = µ̂1 i1
I
ĝ2 ≡ j1 · v21 = 0 → F̂L
2 = µ̂2 j1
I
ĝ3 ≡ k1 · v21 = 0 → F̂L
3 = µ̂3 k1
I
ψ
FL
3
x1
Manuel Ruiz - Mecánica II
y1
FL
1
x0
37 / 40
19
Ligaduras ideales
Se trata de la misma fuerza proyectada en ejes distintos:
FL = µ1 i0 + µ2 j0 + µ3 k0 = µ̂1 i1 + µ̂2 j1 + µ̂3 k1
Por lo que los dos conjuntos de fuerzas de ligadura están
relacionados por las ecuaciones del cambio de ejes:
µ̂2
y1
FL
xy
µ1
µ̂1 = µ1 cos ψ − µ2 sin ψ
µ̂2 = µ1 sin ψ + µ2 cos ψ
µ2
µ̂3 = µ3
µ̂1
igual que lo estaban las ecuaciones de las ligaduras:
g1
ĝ1
ĝ2 = Q 10 · g2
ĝ3
g3
ψ
x1
Manuel Ruiz - Mecánica II
38 / 40
Ligaduras ideales
P
Ligaduras cinemáticas no estacionarias:
Ai · vi + B = 0.
I = 0 ó vI = v j .
Disco vertical sobre placa S3 que se mueve con velocidad v j1 : v23
1
21
z
1
I =0
g1 ≡ i1 · v21
→ FL
z0
1 = µ1 i1
I
ϕ
g2 ≡ j1 · v21 = v → FL
2 = µ 2 j1
I
L
g3 ≡ k1 · v21 = 0 → F3 = µ3 k1
Usando las coordenadas generalizadas de C,
C
g1 ≡ ξ̇ − Rϕ̇ cos ψ = 0
ψ
g2 ≡ η̇ − Rϕ̇ sin ψ −v = 0
g3 ≡ ζ̇ = 0
x1
y0
I
y1
x0
v
En ejes S0 , tenemos dos ligaduras cinemáticas no estacionarias.
Manuel Ruiz - Mecánica II
39 / 40
20
Comentarios sobre ligaduras ideales
Ligaduras ideales ≡ ligaduras sin rozamiento. Aunque hay ligaduras ideales con rozamiento:
el rozamiento no trabaja.
La rodadura sin deslizamiento no es ideal cuando δ y ǫ del modelo de Coulomb-Morin son 6= 0.
¿Por qué congelar las ligaduras en los DVCL? Se buscan direcciones en que las ligaduras no
trabajen. Pero las no estacionarias trabajan al moverse: desplazamiento ∂f /∂t. Por eso se hace
que no se muevan. Ası́ no aparecen las FL
i .
En las estacionarias (S. esclerónomos), δr pos ≡ δr V CL
Si las ligaduras no son ideales sus fuerzas trabajan el los DVCL, y no se pueden eliminar por ese
procedimiento. No se puede emplear la Mecánica Analı́tica en esos sistemas.
En algunos casos, hay rodeos que permiten aplicar la Mecánica Analı́tica, pero en general no
compensa.
Manuel Ruiz - Mecánica II
40 / 40
21