05/06 Fecha: 14.09.2006 5.- Sea el sistema de re
Anuncio

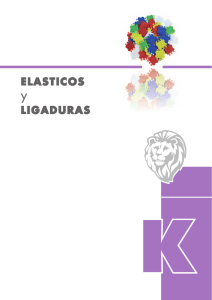
ESCUELA TECNICA SUPERIOR DE INGENIEROS AERONAUTICOS APELLIDOS, NOMBRE: Mecánica II Teorı́a GRUPO: Curso: 05/06 Fecha: 14.09.2006 5.- Sea el sistema de referencia inercial Ox1 y1 z1 , donde Oz1 es vertical, respecto al que se quiere estudiar el movimiento del disco de la figura. Este disco (sólido 2) de centro C, radio R y masa m, es homogéneo y pesado y está contenido en todo instante en el plano giratorio Ox0 z0 , siendo el contacto sin rozamiento. El eje Oz0 coincide en todo instante con el eje Oz1 y el giro del plano es alrededor de este eje común con velocidad angular constante de valor ω. Para definir la posición del disco se utilizan las tres coordenadas generalizadas siguientes: ξ y ζ, que son las coordenadas cartesianas x0 y z0 del centro C; θ, que es el ángulo definido entre un radio del disco y la dirección de Oz0 . Además del peso, sobre el disco se aplica la fuerza F~ı0 (F =cte) que actúa en cada instante sobre el punto del disco con mayor coordenada z0 (sea A este punto, véase la figura). z1 ≡ z0 ω A F ξ C P ζ O ωt x1 θ y1 x0 Se pide: a) Indicar que componentes no nulas pueden tener la resultante y el momento respecto al punto C del sistema de reacciones de contacto del plano Ox0 z0 sobre el disco. b) Contestar razonadamente a las siguientes preguntas: - ¿Coinciden los desplazamientos posibles del sistema y los virtuales compatibles con las ligaduras? - ¿Realiza trabajo el sistema de reacciones del apartado a) en los desplazamientos posibles del sistema? ¿Y en los desplazamientos virtuales compatibles con las ligaduras?. - ¿Está el sistema sometido a ligaduras ideales? c) Determinar en función de las coordenadas generalizadas y de sus derivadas la expresión de la energı́a cinética T del sistema. d) Determinar los términos Qξ , Qζ y Qθ debidos a la fuerza F~ı0 . e) Comprobar si la aplicación de la ecuación de la energı́a para sistemas holónomos a este caso permite obtener alguna integral primera del movimiento. Pn d e j q̇j − ∂T + ∂V , donde los términos Q e j son (T2 − T0 + V ) = j=1 Q (Ecuación de la energı́a: dt ∂t ∂t debidos a las fuerzas no potenciales). (Esta pregunta vale doble: 2/6 de la nota de teorı́a) Solución (Por Manuel Sanjurjo) a) La ligadura que mantiene al disco contenido en el plano es sin rozamiento (o lisa). Las reacciones correspondientes a contacto liso entre sólidos son normales al plano tangente común en cada punto: un sistema de fuerzas distribuidas de la forma δFy j0 . Este sistema es reducible a una resultante que únicamente tendrá componente en dirección O y0 y un momento en C que solo puede tener componentes según Cx0 y Cz0 . b) Para un sólido, los desplazamientos posibles se puede expresar mediante el desplazamiento de un punto (por ejemplo, el C) δrC = vC dt, y un giro elemental ωdt. Se pueden calcular por composición de movimientos 2/1=2/0+0/1. Proyectados en ejes 0, serán δr = ⌊δξ, ξωdt, δζ⌋ ωdt = ⌊0, δθ, ω dt⌋ Los desplazamientos posibles del sistema y los virtuales compatibles con las ligaduras no coinciden porque la ligadura es no estacionaria (sistema reónomo). Congelando la ligadura (t = Cte, dt = 0), los DVCL quedan: δr = ⌊δξ, 0, δζ⌋ ωdt = ⌊0, δθ, 0⌋ Nótese que es adecuado usar δr para el desplazamiento, porque existe el vector posición r. Preferimos no usar δΘ para el giro elemental (aunque en Dinámica de la Actitud se verá que es correcto para giros diferenciales), para que no se interprete como la diferencial de un supuesto vector ángulo (que no existe, lo que existe es la matriz de giro). Por eso se seguirá usando ωdt incluso con las ligaduras congeladas. Aplicando la expresión del trabajo elemental sobre un sólido, δW = R · δrC + MC · ωdt, se tiene: 0 Mx 0 δWP os = ⌊δξ, ξωdt, δζ⌋ · Ry + ⌊0, δθ, ω dt⌋ · = ξωdtRy + ωdtMz 6= 0 0 Mz 0 Mx 0 =0+0 = 0 δWV CL = ⌊δξ, 0, δζ⌋ · Ry + ⌊0, δθ, 0⌋ · 0 Mz Por definición, ligadura ideal es aquélla en la que “el trabajo virtual realizado por las fuerzas de ligadura es nulo, en todo desplazamiento virtual compatible con las ligaduras”. Por lo tanto esta ligadura es ideal. c) Se aplica el teorema de Koenig, pues no tiene ningún punto fijo: 2 1 1 ~ 21 ◦ I¯C ◦ ω ~ 21 T = m ~v C ω 21 + 2 2 donde ~ ~ ~ ~v C 21 =ξ̇ i0 + ζ̇ k 0 + ω ξ j 0 ~ 21 =~ ~ 01 = θ̇ ~j 0 + ω ~ ω ω 20 + ω k0 100 1 I¯C = m R2 0 2 0 4 001 El tensor de inercia se ha expresado en ejes 0. Finalmente se tiene: m R2 m ξ̇ 2 + ζ̇ 2 + ω 2 ξ 2 + ω 2 + 2 θ̇2 = T2 + T0 T = 2 8 d) Se calcula el desplazamiento de A mediante el campo de velocidades del sólido X ~ ~ ~ · ~v A ~ 21 × CA F vC = F ξ̇ + Rθ̇ = Qqi · q̇i 21 = F i0 · ~ 21 + ω i Por lo tanto: Qξ = F , Qζ = 0, Qθ = R F . e) Ni la energı́a cinética ni el potencial del peso dependen explı́citamente del tiempo; por tanto, m m R2 ξ̇ 2 + ζ̇ 2 - ω 2 ξ 2 + - ω 2 + 2 θ̇2 + m g ζ 2 8 n X ∂T ∂V Q̃j q̇j = F ξ̇ + R θ̇ =0 =0 ∂t ∂t j=1 T2 - T0 + V = La ecuación de la energı́a queda: d d (T2 − T0 + V ) = F ξ̇ + R θ̇ = F (ξ + Rθ + Cte.) dt dt Como la potencia de la fuerza F es una diferencial exacta, se obtiene una integral primera: T2 − T0 + V = F (ξ + Rθ + Cte.) Al mismo resultado se llega viendo que esa fuerza deriva de un potencial, d W = F · dr = F (dξ + Rdθ) = d F (ξ + Rθ + Cte) = −d VF que se sumarı́a al del peso; de ese modo, la magnitud que se conserva es la integral de Painlevé: T2 − T0 + VP + VF = h = Cte.