Problemas de Geometr´ıa Proyectiva
Anuncio

Problemas de Geometrı́a Proyectiva
José M. Sánchez Abril
José M. Rodrı́guez-Sanjurjo, Jesús M. Ruiz
1995*
I. VARIEDADES PROYECTIVAS
Número 1. Se consideran en el plano proyectivo P2 los cuatro puntos a0 = (1 : 0 : 1),
a1 = (0 : 2 : 1), a2 = (0 : 0 : 1) y a3 = (1 : −1 : 0).
(1) Comprobar que R = {a0 , a1 , a2 ; a3 } es una referencia proyectiva, y buscar una base
asociada a ella.
(2) Calcular las coordenadas homogéneas respecto a R de los dos puntos (1 : −2 : 1) y
(1 : −1 : −1).
(3) Calcular las coordenadas homogéneas respecto a R de un punto arbitrario (x0 : x1 : x2 ).
Número 2. Sea R = {a0 , a1 , a2 ; a3 } una referencia proyectiva de P2 .
(1) Mostrar que cualquier reordenación suya R0 es también una referencia proyectiva.
(2) Calcular la matriz del cambio de referencia entre dos reordenaciones cualesquiera. ¿Se
obtiene siempre la misma matriz? ¿Se obtienen siempre matrices distintas?
Número 3. Comprobar que los tres puntos (1 : 2 : 2), (3 : 1 : 4) y (2 : −1 : 2) de P2 están
alineados, y determinar una ecuación de la recta que pasa por ellos.
Número 4. En el plano proyectivo P2 hallar:
(1) El punto de intersección de la recta r que pasa por los puntos (3 : 1 : −2) y (1 : −5 : 3)
y la recta s de ecuación 2x0 − 3x1 − 4x2 = 0.
(2) La ecuación de la recta que pasa por el punto (1 : 2 : −2) y el punto de corte de las rectas
2x0 − 3x1 + 7x2 = 0 y 5x0 + 2x2 = 0.
Número 5. En el espacio proyectivo P3 hallar:
(1) La ecuación del plano que contiene a la recta r : x0 − x1 + x2 = 0 = x1 − 2x2 + x3 y al
punto p = (1 : −2 : 0 : 1).
(2) La ecuación del plano que pasa por los puntos (1 : 0 : −1 : 1), (−1 : 0 : 3 : 2) y
(5 : 2 : 0 : 1).
(3) Las ecuaciones de la recta que se obtiene al cortar el plano del apartado (2) con el plano
que pasa por los puntos (1 : −1 : 1 : 2), (1 : 0 : 0 : 1) y (0 : 0 : 1 : 0).
Número 6.
Se consideran en el plano proyectivo P2 las dos referencias proyectivas:
R = {(2 : 0 : −1), (1 : −1 : 0), (1 : −1 : 1); (1 : 0 : −1)}, y
*
Revisión 2004
1
J.M. Sánchez Abril,
J.M. Rodrı́guez-Sanjurjo,
J.M. Ruiz,
1995
R0 = {(1 : 1 : 1), (0 : 1 : 1), (1 : 0 : 1); (2 : 2 : 3)}.
Se considera ası́mismo la recta r ⊂ P2 que pasa por los puntos a y b, cuyas coordenadas respecto
de la primera referencia son (1 : 0 : 1) y (2 : −1 : 0), respectivamente.
(1) Calcular una ecuación de r respecto de R.
(2) Calcular las coordenadas de a y b respecto de R0 , y la ecuación de r respecto de R0 .
(3) Calcular las ecuaciones del cambio de referencia de R0 a R.
(4) Utilizar esas ecuaciones de cambio para obtener la ecuación de r respecto de R0 a partir
de la ecuación respecto de R.
Número 7. Se consideran en P3 los puntos a = (1 : 2 : −1 : 1), a0 = (1 : −1 : 2 : −1),
b = (3 : 0 : 1 : 1) y b0 = (−1 : 1 : 0 : k), donde k es un escalar. Sean r la recta que pasa por a y
a0 y s la que pasa por b y b0 . Determinar k para que r ∩ s 6= ∅, y calcular V (r, s).
Número 8. En P4 se considera la variedad X generada por los puntos (1 : 0 : −1 : 0 : 1),
(0 : 1 : 0 : 1 : −1) y (2 : 2 : −2 : 1 : 2), y la variedad Y de ecuaciones x0 − x1 + x4 = 0 =
2x0 + x2 − x3 . Calcular las variedades X ∩ Y y V (X, Y ).
Número 9. En cada uno de los casos siguientes encontrar una ecuación de la recta del plano
proyectivo complejo P2 (C) que pasa por los dos puntos dados:
(a) (−1 : 1 : 1), (1 : 3 : 2i);
(b) (1 : −1 : i), (i : 1 : 1);
(c) (1 : 1 : 2i), (1 : −2 : 2i);
(d) (−1 : 1 : i), (1 : −1 : i).
Número 10.
Determinar si las rectas siguientes de P3 se cruzan o son incidentes:
r : x0 − x1 + x2 = 0 = x1 − 2x2 + x3 ,
s : x0 + x2 − 3x3 = 0 = x0 − 2x1 − 2x2 .
Número 11. Demostrar que dadas tres rectas cualesquiera r, r0 y r00 de P4 que no están
contenidas en un mismo hiperplano y que son disjuntas dos a dos, existe una recta única que
corta a las tres rectas r, r0 y r00 .
Número 12. En el espacio proyectivo P3 determinar la variedad proyectiva intersección de
los tres planos de ecuaciones respectivas
π1 : 3x0 −3x1 +x2 −5x3 = 0;
π2 : 5x0 +3x1 −5x2 +x3 = 0,
y
π3 : 3x0 +3x1 −4x2 +2x3 = 0.
Determinar la dimensión de ese subespacio proyectivo.
II. APLICACIONES PROYECTIVAS
Número 13.
Estudiar si la aplicación proyectiva f : P3 → P3 de ecuaciones
ρx00 = x0
ρx01 = x3
ρx02 = x2
ρx03 = x3
2
J.M. Sánchez Abril,
J.M. Rodrı́guez-Sanjurjo,
J.M. Ruiz,
1995
es una proyección cónica. Calcular las imágenes y las imágenes inversas del punto p = (1 : −1 :
0 : −1) y de la recta r : x1 = 0 = x0 + x2 + x3 .
Número 14. Hallar la matriz que respecto del sistema de referencia estándar de P1 tiene la
homografı́a f : P1 → P1 tal que f (1 : 2) = (7 : 5), f (3 : 1) = (9 : 5), f (−2 : 1) = (8 : 5).
Determinar los puntos fijos de f .
Número 15. Determinar la homografı́a del plano proyectivo real P2 que transforma los puntos
(1 : 0 : 0), (1 : −1 : 0), (0 : 2 : −1) y (3 : −3 : 1) en los puntos (1 : 0 : 1), (0 : 2 : 1), (0 : 0 : 1) y
(1 : −1 : 0), respectivamente.
Número 16. Una homografı́a del plano proyectivo real P2 transforma las rectas de ecuaciones
x0 = 0, x1 = 0 y x2 = 0 en las rectas de ecuaciones x0 − x1 + x2 = 0, x0 + 2x2 = 0 y x0 + x1 = 0
respectivamente. Además deja fijo el punto (1 : 1 : 1). Determinar la expresión analı́tica de dicha
homografı́a.
Número 17. Sean a0 , a1 , a2 y a3 cuatro puntos distintos de la recta proyectiva real P1 . Demostrar que hay una homografı́a única de P1 que transforma los puntos a0 , a1 , a2 y a3 en los
puntos a2 , a3 , a0 y a1 , respectivamente.
Número 18. Sean a0 , a1 , a2 y a3 cuatro puntos distintos del plano proyectivo real P2 tales
que la variedad proyectiva V (a0 , a1 , a2 ) no pasa por a3 . Demostrar que existe una homografı́a
de P2 que transforma los puntos a0 , a1 , a2 y a3 en los puntos a1 , a2 , a0 y a3 , respectivamente.
¿Es única esa homografı́a?
Número 19.
En el plano proyectivo real P2 se consideran las referencias proyectivas
R = {a0 , a1 , a2 ; a3 } y R0 = {a2 , a3 , a1 ; a0 }.
Determinar, respecto de la referencia proyectiva R, la expresión analı́tica de la homografı́a que
transforma R en R0 . Determinar la expresión analı́tica de la misma homografı́a respecto de la
referencia R00 = {a3 , a2 , a0 ; a1 }.
Número 20. Se denota {a0 , a1 , a2 , a3 ; a4 } la referencia proyectiva estándar de P3 , y se consideran los puntos:
b1 = (1 : 1 : 0 : 1), b4 = (2 : 1 : 1 : 0)
Mostrar que R = {a0 , b1 , a3 , a2 ; b4 } es una referencia proyectiva, y calcular respecto de ella las
ecuaciones de la homografı́a f : P3 → P3 tal que
f (a0 ) = (1 : −1 : 0 : 1), f (b1 ) = (1 : 0 : 1 : 0), f (a3 ) = (0 : 0 : 1 : 1), f (a2 ) = a3 , f (b4 ) = a1 .
Número 21. En P2 se consideran el punto a = (1 : −2 : 1) y la recta r : x0 + x1 − x2 = 0.
Encontrar la expresión analı́tica de la proyección cónica de centro a e imagen r.
Número 22. Determinar las ecuaciones de la proyección cónica de P3 sobre el plano de ecuación x0 + x1 + x2 + x3 = 0, de centro (1 : 0 : 1 : 0). Determinar también las ecuaciones de la
imagen inversa del punto (1 : 1 : −1 : −1) y del hiperplano x0 + x1 = 0.
3
J.M. Sánchez Abril,
J.M. Rodrı́guez-Sanjurjo,
J.M. Ruiz,
1995
Número 23. En el espacio proyectivo real P3 se consideran las rectas r de ecuaciones x0 −
x1 + x2 + 2x3 = 0 = x1 − 2x2 + x3 y r0 de ecuaciones x0 + x2 = 0 = x1 − x2 + x3 . Hallar la
expresión analı́tica de la proyección cónica de P2 sobre la recta r0 , de centro la recta r.
Número 24. Sean r y s dos rectas distintas del plano proyectivo real P2 y sean P y Q dos
puntos distintos que no están ni en r ni en s. Se consideran las aplicaciones f : r → s y g : s → r
definidas por: para cada punto A de r, f (A) es el punto de corte de s con la recta que pasa por
P y A, y para cada punto B de s, g(B) es el punto de corte de r con la recta que pasa por Q y
B. Demostrar que la composición h = g ◦ f es una homografı́a de la recta r.
Obtener una expresión analı́tica de h respecto de la referencia proyectiva R = {a0 , a1 ; a2 }
de r, siendo r la recta de ecuación x0 + x1 = 0, s la recta de ecuación x0 − x1 = 0, P = (1 : 0 :
0), Q = (2 : 0 : 1), a0 = (1 : −1 : 1), a1 = (1 : −1 : 0) y a2 = (0 : 0 : 1).
III. RELACIONES ENTRE ESPACIO AFÍN Y PROYECTIVO
Número 25. Comprobar que R = {(1, 2, −1); (1, 1, 0), (2, 1, 3), (0, 0, 1)} es una referencia care asociada a R y las coordenadas
tesiana del espacio afı́n real A3 . Hallar la referencia proyectiva R
3
e
respecto de R de un punto arbitrario de P .
Número 26. Sea f la aplicación afı́n de A2 en A3 determinada por las condiciones f (1, 0) =
(2, 2, 0), f (−1, 1) = (0, −1, 1) y f (1, 2) = (−2, 0, −2). Hallar la expresión analı́tica de la extensión
proyectiva fe de f , y el centro y la imagen de fe.
Número 27. Una afinidad f del plano afı́n A2 transforma p = (−1, −3) en p0 = (1, −2), y
p0 en p00 = (3, −1), y tiene una recta de puntos fijos paralela a la recta que pasa por p, p0 y
p00 . Además, la extensión proyectiva fe de f trasforma la recta x0 + x1 + x2 = 0 en la recta
x0 + x1 + 4x2 = 0. Encontrar las ecuaciones de f y fe.
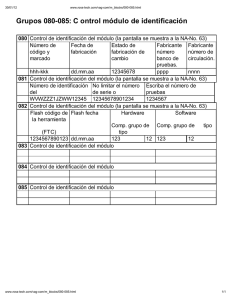
Número 28.
En un plano proyectivo P se considera la figura siguiente:
F v
C
C
R = {A, B, F ; G}
C
C
C
D a
f
@aaaC C
Cf
@ a
v C aa
G@
aa
@ C
aa
B
A aaE
@
@CCv
v
f
Sea A el plano afı́n P \ V (B, C).
(1) Demostrar que R = {A, B, F ; G} es la referencia proyectiva asociada a una referencia
cartesiana Ra de A. Hallar las coordenadas de los puntos D y E respecto de Ra .
(2) Hallar las coordenadas del punto D respecto de la referencia {A, E, G} de A, y las del
punto A respecto de la referencia {G, E, D}.
Número 29. Con los datos del número precedente, sean f la homografı́a de P que transforma
A, B, F, G en E, B, F, D, y g la que transforma A, B, C, D en E, F, B, G.
4
J.M. Sánchez Abril,
J.M. Rodrı́guez-Sanjurjo,
J.M. Ruiz,
1995
(1) Obtener las expresiones analı́ticas de f y g respecto de la referencia R.
(2) Comprobar que hay aplicaciones afines A → A cuyas extensiones proyectivas son f y g.
Número 30. Sea r una recta proyectiva y R = {a0 , a1 ; a2 } una referencia proyectiva suya;
sea a ∈ r el punto de coordenadas (2 : −1) respecto de R. En la recta afı́n r \ {a0 } se considera
→}. Determinar la referencia proyectiva R
fa de r asociada a
la referencia cartesiana Ra = {a; −
aa
2
fa y la coordenada del
la referencia cartesiana Ra , la matriz del cambio de coordenadas de R a R
punto a1 respecto de Ra .
Número 31. Consideramos en el plano proyectivo P2 , la recta r de ecuación x0 + x1 + x2 = 0
respecto de la referencia proyectiva estándar R. En el plano afı́n P2 \ r tenemos la referencia
→ −−→
cartesiana R0 = {a0 ; −
a−
0 a1 , a0 a2 }, siendo a0 = (1 : 1 : 1), a1 = (1 : −2 : 0) y a2 = (2 : 0 : 1);
denotamos por (y1 , y2 ) las coordenadas de un punto p ∈ P2 \ r respecto de R0 .
(1) Expresar las coordenadas (y1 , y2 ) en función de las coordenadas (x0 : x1 : x2 ) de p en P2
respecto de R.
(2) Hallar el punto medio del segmento pq donde p = (2 : −1 : 1) y q = (0 : −2 : 1),
gráficamente y en coordenadas.
Número 32. En el plano proyectivo P2 sea r la recta de ecuación 3x0 − x1 + 2x2 = 0 y
consideremos el plano afı́n P2 \ r. Hallar la ecuación de la recta afı́n que pasa por los puntos
→ −−→
2
(1 : 2 : −3) y (2 : 1 : 5), respecto de la referencia cartesiana {a0 ; −
a−
0 a1 , a0 a2 } de P \ r, donde
a0 = (0 : 1 : 1), a1 = (1 : 0 : −1) y a2 = (0 : 3 : 1).
Número 33. Consideramos el plano afı́n P2 \r, donde r es la recta de ecuación x0 +x1 +x2 = 0
→
y la traslación definida por el vector −
pq con p = (1 : 1 : 0) y q = (0 : 1 : 1). Hallar la expresión
analı́tica de la extensión proyectiva de la traslación.
Número 34. De una homografı́a del plano proyectivo P2 se sabe que en el plano afı́n x0 −x2 6=
0 determina una homotecia de centro (1 : −2 : 3) y razón −1. Dar unas ecuaciones de la
homografı́a.
Número 35. Sea A2 el plano afı́n P2 \ r, donde r es la recta de P2 de ecuación x1 − x2 = 0.
Sea h : A2 → A2 la homotecia de centro (1 : 0 : 1) que transforma el punto (1 : −1 : 1) en el
punto (2 : −1 : 2). Hallar la razón de h y una expresión analı́tica de la extensión proyectiva e
h
de h.
Número 36.
Sea f la homografı́a del plano proyectivo real P2 definida por
ρx00 = x1 + x2
ρx01 = x0 + x2
ρx02 = x0 + x1
Demostrar que f tiene una recta r de puntos fijos y que la restricción de f al plano afı́n P2 \ r
es una homotecia. Hallar el centro y la razón de dicha homotecia.
Número 37.
en E, C, F, A.
Con los datos del número 28, sea h la homografı́a de P que trasforma A, E, C, F
5
J.M. Sánchez Abril,
J.M. Rodrı́guez-Sanjurjo,
J.M. Ruiz,
1995
(1) Escribir las ecuaciones de h respecto de la referencia proyectiva R.
(2) Mostrar que h2 es la extensión proyectiva de una homotecia ϕ del plano afı́n P \ V (B, D)
(3) Escribir las ecuaciones de ϕ respecto de la referencia {A, E, F }.
(4) ¿Cuál es el centro y cuál la razón de ϕ?
Número 38. En P2 se consideran los puntos a0 = (1 : 1 : 0), a1 = (0 : 1 : 1), a2 = (2 : 1 : 2)
y a3 = (1 : 1 : 1). Determinar una recta r tal que en el plano afı́n P2 \ r se verifique a3 =
→ −−→
a0 + −
a−
0 a1 + a0 a2 . Determinar las coordenadas cartesianas del punto (1 : 0 : 0) en la referencia
→ −−→
2
cartesiana {a1 ; −
a−
0 a1 , a0 a2 } de P \ r.
Número 39. Sea f la proyección cónica de P2 sobre el plano x0 = 0 con centro (1 : 0 : 1 : 0).
Hallar unas ecuaciones de la proyección paralela inducida por f en el complementario del plano
x0 − x2 = 0.
IV. RAZÓN DOBLE
Número 40. Se consideran en P1 los cuatro puntos A = (1 : −1), B = (3 : −1), C = (1 : 0)
y D = (2 : 1).
(1) Calcular la razón doble [A, B, C, D].
(2) Dado un escalar k, hallar el punto Dk ∈ P1 tal que [A, B, C, Dk ] = k.
Número 41. Se consideran en el plano proyectivo real P2 los puntos A = (1 : −1 : 0), B =
(0 : 1 : −1) y C = (1 : 1 : −2). Hallar otros dos puntos C 0 y D tales que [A, B, C, D] = −1/2 y
[A, B, C 0 , D] = −2/3.
Número 42. En un plano proyectivo P2 se consideran los cuatro puntos A = (1 : 0 : 0), B =
(1 : 1 : 1), C = (0 : 1 : 1) y D = (−2 : 1 : 1). Comprobar que están alineados y calcular la razón
doble [A, B, C, D]. Hallar el punto A0 ∈ P2 tal que [A0 , B, C, D] = −1.
Número 43.
Se consideran en la recta proyectiva real P1 los cuatro puntos siguientes:
a = (1 : 0),
b = (0 : 1),
a0 = (1 : 1),
c0 = (1 : −1).
Mostrar que no existe ningún par de puntos c, d de manera que las dos cuaternas a, b, c, d y
a0 , b0 , c, d sean armónicas.
Número 44. Sean A, B y C tres puntos distintos de una recta afı́n r, cuya completada proyectiva es la recta proyectiva re = r ∪ {D∞ }. Demostrar que [A, B, C, D∞ ] = −1 en re si y sólo si
C es el punto medio del segmento AB en r.
Número 45. En una recta afı́n r se toman cuatro puntos distintos A, B, C y D; en una
referencia cartesiana de r de origen el punto P0 las coordenadas de los cuatro puntos son a, b, c
y d, respectivamente. Demostrar:
(1) Si P0 es el punto A, entonces la razón doble [A, B, C, D] = −1 si y sólo si 2b = 1c + d1 .
(2) Si P0 es el punto medio del segmento AB, entonces la razón doble [A, B, C, D] = −1 si
y sólo si a2 = c · d.
6
J.M. Sánchez Abril,
J.M. Rodrı́guez-Sanjurjo,
J.M. Ruiz,
1995
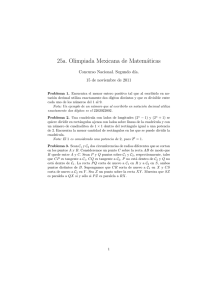
Número 46. En una recta proyectiva r se tienen tres puntos a, c, d, y se construye una sucesión
(bn ) según la configuración siguiente:
a
b3
c
b1
b2
d
r
Calcular la razón doble [a, bn , c, d].
Número 47. Sea R = {a0 , a1 , a2 ; a} una referencia proyectiva del plano proyectivo real P2 .
Sean a3 el punto de corte de las rectas V (a0 , a) y V (a1 , a2 ), a4 el punto de corte de las rectas
V (a0 , a1 ) y V (a2 , a), a5 el punto de corte de las rectas V (a1 , a) y V (a3 , a4 ) y a6 el punto de
corte de las rectas V (a0 , a2 ) y V (a3 , a4 ).
a6
a2
a
a0
a3
a5
a4
a1
Calcular la razón doble [a3 , a4 , a5 , a6 ].
Número 48. En el espacio proyectivo real P3 se consideran los puntos A = (1 : 1 : 1 : 1), B =
(−1 : 2 : 2 : −1) y C = (2 : −1 : −1 : 2), y el plano H de ecuación x0 + x1 − x2 = 0.
(1) Demostrar que los puntos A, B y C están en una recta proyectiva r, hallar el punto de
corte D del plano H y la recta r, y calcular la razón doble [A, B, C, D].
(2) Determinar las ecuaciones de la aplicación proyectiva de P3 en sı́ mismo que deja fijos
los puntos del plano H y el punto C, y transforma A en B.
Número 49. Calcular, por dos métodos distintos, la razón doble [a, b, c, d] de las cuatro rectas
siguientes de P2 :
a : x0 − x1 + 2x2 = 0,
b : x0 + x1 − x2 = 0,
c : 2x0 − 4x1 + 7x2 = 0,
7
d : 5x0 + x1 + x2 = 0
J.M. Sánchez Abril,
J.M. Rodrı́guez-Sanjurjo,
J.M. Ruiz,
1995
Número 50. Hallar, por dos métodos distintos, la razón doble [H1 , H2 , H3 , H4 ], de los siguientes hiperplanos del espacio proyectivo P3 :
H1 : −x1 + 3x2 = 0,
H2 : x2 = 0,
H3 : 5x1 − x2 = 0,
H4 : 4x1 − 3x2 = 0.
Número 51. Sean A, B, C y D cuatro puntos alineados y A0 , B 0 , C 0 y D0 otros cuatro puntos
también alineados de P2 , y tales que [A, B, C, D] = [A0 , B 0 , C 0 , D0 ].
(1) Demostrar que si las rectas V (A, A0 ), V (B, B 0 ) y V (C, C 0 ) son concurrentes, entonces la
recta V (D, D0 ) también pasa por el punto de concurrencia.
(2) Demostrar que si A y A0 son el mismo punto, entonces las rectas V (B, B 0 ), V (C, C 0 ) y
V (D, D0 ) son concurrentes.
V. HOMOGRAFÍAS
Número 52. Una homografı́a h de la recta proyectiva P1 deja fijos los puntos A = (1 : 0)
y B = (1 : −1). También se sabe que la razón doble [A, B, C, h(C)] = 2, donde C es el punto
(1 : 1). Obtener la expresión analı́tica de h en la referencia proyectiva estándar.
Número 53. Determinar la expresión analı́tica de una homografı́a de la recta proyectiva real
P1 de la que se sabe que tiene un punto fijo único, el punto (0 : 1), y que transforma el punto
(1 : 2) en el punto (2 : 5).
Número 54. Sea h la homografı́a de P1 que transforma los puntos A, B y C en los puntos
A, C y D, donde A = (1 : 0), B = (0 : 1), C = (1 : 1) y D = (2 : 3). ¿Qué transformación
induce h en la recta afı́n P1 \ {A}? Dar la matriz de esta transformación afı́n respecto de la
−−→
referencia cartesiana {B; CB} y la coordenada del punto imagen del punto D en la referencia
−−→
cartesiana {C; BC}.
Número 55.
ecuaciones
Determinar las variedades invariantes de la homografı́a f de P2 definida por las
ρx00 = −2x1 + 4x2
ρx01 = 9x0 − 6x1
ρx02 = 6x2
Hallar una referencia respecto de la cual la matriz de f tenga forma de Jordan.
Número 56. Se consideran las siguientes propiedades de una homografı́a del plano proyectivo
real P2 :
(i) Transforma el punto (1 : 0 : 0) en el cuarto armónico de los puntos (0 : 3 : 2), (1 : 1 : 1)
y (2 : −1 : 0),
(ii) Deja fijo el punto (1 : 0 : 1), y
(iii) Su restricción a la recta r : x0 − x1 + x2 = 0 es una homografı́a involutiva sin puntos
fijos.
Dar las ecuaciones de todas las homografı́as que cumplen las tres propiedades. ¿Cuáles son
sus formas de Jordan?
8
J.M. Sánchez Abril,
J.M. Rodrı́guez-Sanjurjo,
J.M. Ruiz,
1995
Número 57. Determinar la homografı́a de P2 que deja fijos los puntos (2 : 0 : −1), (0 : −1 : 1)
y (0 : 0 : 1), y transforma el punto (1 : 1 : −1) en el punto (4 : −6 : 5).
Número 58. Determinar una homologı́a del plano proyectivo real P2 , sabiendo que su base
es la recta de ecuación x0 + x1 − 2x2 = 0, su vértice es el punto (1 : 1 : 0), y transforma el punto
(0 : 1 : −1) en el punto (1 : 0 : 1).
Número 59.
Demostrar que las homografı́a de P2 definidas por
ρx00 = x1 + x2
ρx00 = 3x0
0
ρx01 = x0 + x2
ρx1 = 3x1
y g:
f:
0
ρx02 = x0 + x1
ρx2 = −x0 − 2x1 + x2
son homologı́as. Hallar sus variedades invariantes.
Número 60. Una homologı́a de P2 de caracterı́stica −1/2 transforma la recta de ecuación
x0 + x1 + x2 = 0 en la recta de ecuación x0 − x1 = 0 y deja invariante la recta x1 = 0.
Determinar su expresión analı́tica sabiendo que su base es la recta 2x0 + x2 = 0.
Número 61. Determinar una homologı́a de P2 de la que se sabe que su vértice es un punto
de su base, y que transforma las rectas de ecuaciones x0 + x1 = 0 y x0 − x1 = 0 en las rectas
x0 + x2 = 0 y x0 − x2 = 0, respectivamente.
Número 62.
Para cada escalar k, se considera la homografı́a de P2 dada por:
ρx00 = kx0 + x1 + x2
ρx01 = x0 + x2
fk :
ρx02 = x0 + x1
Determinar los valores de k para los que fk es una homologı́a, y en cada caso su vértice, su base
y su caracterı́stica.
Número 63. Una homografı́a involutiva h de P2 deja invariantes los puntos (1 : −1 : 0) y
(0 : 1 : 0), y la recta x0 + x1 + 3x2 = 0, que pasa por el primero de ellos. Además, h trasforma
(0 : 3 : −1) en (4 : −1 : −1). Precisar si h está determinada de manera única, y de qué tipo es
su matriz de Jordan. Determinar sus rectas invariantes.
Número 64.
Para cada a ∈ R, sea h = ha la homografı́a de P2 definida por las ecuaciones
ρx00 = x0 + x2
ρx01 = −x0 + ax1 + x2
ρx02 = −x0 + 3x2
(1) Hallar la forma de Jordan de h.
(2) Hallar la base y el vértice de h cuando h es una elación.
(3) Sabiendo que una de las homografı́as anteriores deja invariante la recta r que pasa por
los puntos a = (0 : 1 : 4) y b = (1 : 0 : 1), obtener la matriz de la restricción de esa homografı́a
a r, en la referencia {h−1 (a), a; b}
9
J.M. Sánchez Abril,
J.M. Rodrı́guez-Sanjurjo,
J.M. Ruiz,
1995
Número 65. (1) En el espacio proyectivo real P3 se considera el plano de ecuación π : x0 +
x1 − 2x2 = 0. Una homografı́a g de π deja fijo el punto (2 : 0 : 1 : 0), trasforma el punto
(0 : 2 : 1 : 1) en el punto (0 : 2 : 1 : −3), éste en el punto (8 : −6 : 1 : 5), y el punto (1 : −1 : 0 : 1)
en el punto (4 : −4 : 0 : 3). Determinar la forma de Jordan y las variedades invariantes de f ,
expresándo éstas en la referencia proyectiva estándar de P3 .
(2) Calcular la matriz respecto de la referencia proyectiva estándar de la homografı́a f de P3
que induce g en el plano π, y deja fijos los puntos de la recta x1 = 0 = x3 .
(3) Describir las variedades invariantes y la forma de Jordan de f .
Número 66.
Sea f la homografı́a f de P3 definida por las ecuaciones
ρx00 = −2x0 + x1 + 3x3
ρx01 = −x1
ρx02 = 3x0 + x2 − 3x3
ρx03 = x1 + x3
(1) Comprobar que el plano π : x1 + 2x3 = 0 es invariante, y hallar la matriz de f |π, en una
referencia formada por los puntos (0 : 0 : 1 : 0), (0 : 2 : 0 : −1) y sus sucesivas imágenes.
(2) Determinar las rectas invariantes de f contenidas en π.
(3) Obtener la forma de Jordan y las variedades invariantes de f .
VI. CORRELACIONES
Número 67.
Sea f la correlación de P2 de ecuaciones
ρx∗0 = x0 + x2
ρx∗1 = −x1 + 2x2
ρx∗2 = x0 + 2x1
Hallar las imágenes mediante f de la recta r : x1 − x2 = 0 y del punto (1 : 2 : 3).
Número 68.
Sea f la correlación de P3 de ecuaciones
ρx∗0 = 2x2
ρx∗1 = x2 − x3
ρx∗2 = −2x0 − x1 + 3x3
ρx∗3 = x1 + 3x2
Hallar las imágenes mediante f del plano π : x0 − x1 = 0, de la recta r : x0 − x1 = 0 = x2 + x3
y del punto (1 : 1 : 0 : 0).
Número 69. Determinar la expresión analı́tica de una correlación de P2 que transforma los
puntos (1 : 0 : 0), (1 : −2 : 1), (0 : 2 : 1) y (1 : −2 : 0) en las rectas de ecuaciones x0 − x1 =
0, x0 + x2 = 0, x0 − x1 + x2 = 0 y x0 = 0, respectivamente. Hallar el punto transformado de la
recta x0 = 0.
Número 70. Una correlación de P2 transforma las rectas x0 − x1 = 0, x0 + x2 = 0 y x0 −
x1 + x2 = 0 en los puntos (1 : 1 : 0), (1 : −1 : −2) y (0 : 1 : 2), respectivamente. Sabiendo que el
10
J.M. Sánchez Abril,
J.M. Rodrı́guez-Sanjurjo,
J.M. Ruiz,
1995
punto (1 : 0 : 0) se transforma en la recta 4x1 − 3x2 = 0, obtener la expresión analı́tica de dicha
correlación. Hallar también el punto que se transforma en la recta x0 − x1 = 0.
Número 71. Determinar la expresión analı́tica de la colineación que se obtiene al componer
las correlaciones de los dos ejercicios anteriores.
Número 72. Sea R = {a0 , a1 , a2 ; a3 } una referencia del plano proyectivo real P2 . Demostrar
que existe una correlación única que transforma cada vértice del triángulo a0 a1 a2 en el lado
opuesto correspondiente, y transforma a3 en una recta prefijada que no pasa por ninguno de los
puntos a0 , a1 y a2 . Comprobar que dicha correlación es simétrica.
Número 73. Demostrar que existe una correlación única de P2 , que transforma cada uno de
los vértices de un pentágono dado en el lado opuesto correspondiente. Además, dicha correlación
es simétrica.
Número 74.
g siguientes:
En el espacio proyectivo real P3 se consideran la correlación f y la colineación
ρx∗0
ρx∗1
f:
ρx∗2
ρx∗3
ρx00
ρx01
g:
ρx02
ρx03
= 2x0 + x2
= x1
= x0 + 2x2
= x3
= x0 + 2x3
= x1
= x2
= 2x0 + 3x3
Hallar las imágenes mediante la correlación g ◦ f del plano π : x1 + x2 = 0 y de la recta
r : x0 = x1 + x2 = 0.
Número 75. Una correlación involutiva simétrica de P3 transforma en sı́ mismas las rectas
x1 = 0 = x2 − x3 y x1 = 0 = x2 + x3 , y transforma los puntos (0 : 0 : 1 : 1) y (0 : 0 : 1 : −1) de
esas rectas en planos que contienen al punto (0 : 1 : 0 : 0). Sabiendo que el punto (0 : 1 : 1 : 0)
se transforma en el plano x0 + x2 = 0, obtener la expresión analı́tica de la correlación.
Número 76. Una correlación involutiva simétrica de P3 transforma en sı́ mismas las rectas
r, r0 y r00 de ecuaciones respectivas x1 = 0 = x2 , x1 = 0 = x2 + 2x3 y x2 = 0 = 2x0 − x1 , y
transforma el punto (0 : 1 : −1 : 0) en el plano x0 + x3 = 0.
(1) Hallar los planos transformados de los puntos (1 : 0 : 0 : 0) y (0 : 0 : 0 : 1).
(2) Teniendo en cuenta cómo deben ser los planos transformados de los puntos (1 : 2 : 0 : 0)
de r00 y (0 : 0 : 2 : −1) de r0 , obtener la expresión analı́tica de la correlación.
Número 77. Una correlación involutiva simétrica de P3 transforma los puntos (1 : 0 : 0 : 0) y
(0 : 1 : 0 : 0) en los planos 4x0 − x1 − 2x2 = 0 y x0 − x1 − 2x3 = 0, respectivamente, y transforma
la recta x0 = 0 = x1 en la recta 2x0 + 2x1 − x2 = 0 = 2x0 + 4x1 + x3 . Determinar la expresión
analı́tica de dicha correlación.
Número 78.
Sea f la elación de P3 de vértice (0 : 1 : 0 : 0) y base el plano x0 − x2 = 0, que
11
J.M. Sánchez Abril,
J.M. Rodrı́guez-Sanjurjo,
J.M. Ruiz,
1995
transforma (0 : 0 : 1 : 0) en (0 : 1 : 1 : 0). Sea g la correlación de P3 de ecuaciones
ρx∗0 = 2x0
ρx∗1 = −x0 + 2x1
ρx∗2 = 2x2
ρx∗3 = −x2 + 2x3
Mostrar que la aplicación h : x 7→ g(f (g −1 (x)) es una homologı́a, y hallar su base y su vértice.
VII. CUÁDRICAS
Número 79. Dada la cuádrica Q de P3 definida por la ecuación x20 + x21 + x23 + x0 x2 − x1 x2 +
2x1 x3 − x2 x3 = 0, hallar el plano tangente a Q en el punto (1 : 2 : −1 : −2). Comprobar que la
intersección de la cuádrica Q con dicho plano es una cónica degenerada. Determinar los escalares
a tales que la recta de ecuaciones x0 − x1 + ax2 = 0 = 2x0 + x3 es tangente a la cuádrica.
Número 80. Determinar las rectas del plano proyectivo real P2 que son tangentes a la cónica
de ecuación x20 − 2x21 − 2x22 + 2x0 x2 − 4x1 x2 = 0 y pasan por el punto (2 : 2 : −1).
Número 81. Determinar el plano polar del punto a = (1 : 0 : 1 : 0) de P3 respecto de la
cuádrica de ecuación x21 − 4x23 + 4x0 x2 − 2x0 x3 + 2x2 x3 = 0. Hallar la ecuación del cono formado
por las rectas tangentes a la cuádrica que pasan por el punto a.
Número 82. Se considera en P3 la cuádrica Q de ecuación 4x21 + x23 − 2x0 x2 = 0
(1) Determinar la recta polar respecto de Q de la recta r : x0 − 2x3 = 0 = 2x1 − x2 − x3 .
(2) Hallar los planos tangentes a Q que contienen a la recta r.
Número 83. La polaridad asociada a una cuádrica Q de P3 transforma el punto (0 : 1 : 0 : 0)
en el plano x1 − x2 = 0 y la recta x0 + x1 = 0 = x0 − x1 en la recta x0 + x3 = 0 = x1 + x3 .
¿Cuál es el plano polar del punto (0 : 0 : 1 : 0) respecto de Q? Sabiendo que las intersecciones
de Q con los planos x2 = 0 y x3 = 0 son cónicas degeneradas, determinar la ecuación de Q y
encontrar los puntos de tangencia con los planos anteriores.
Número 84. Se consideran en P2 la cónica C : 4x20 + 4x21 + x22 − 2x0 x2 − 4x1 x2 = 0 y la recta
r : 2x1 − x2 = 0. Obtener la expresión analı́tica de la homografı́a inducida por la cónica en la
recta, respecto de la referencia de ésta formada por los puntos (1 : 0 : 0), (0 : 1 : 2) y (1 : 1 : 2).
Número 85. En el espacio proyectivo real P3 se consideran la cuádrica Q de ecuación 2x20 +
7x0 x1 + x0 x2 − 2x0 x3 + 2x1 x2 + 2x2 x3 = 0 y la recta r de ecuaciones 3x0 − x2 = 0 = x1 + x3 .
Obtener la expresión analı́tica de la homografı́a subordinada por la cuádrica sobre la recta
respecto de la referencia de ésta formada por el punto (1 : 0 : 3 : 0) y los puntos de intersección
de la recta con la cuádrica.
Número 86. Para cada escalar k (6= 0, 1) se considera en P2 la cónica Ck : x20 + 2kx1 x2 = 0;
sea además C 0 la cónica de ecuación x20 + 2x1 x2 = 0. Determinar k para que todas las polares
respecto de C 0 de puntos de Ck sean tangentes a Ck .
12
J.M. Sánchez Abril,
J.M. Rodrı́guez-Sanjurjo,
J.M. Ruiz,
1995
Número 87. En el plano afı́n real A2 se considera la cónica de ecuación x2 + 2xy − 4y − 3 = 0.
Comprobar que la recta r de ecuación y + 1 = 0 es tangente a la cónica y determinar otra recta
tangente que sea paralela a r.
Número 88. Dada la cuádrica afı́n de A3 de ecuación 3x2 − y 2 − z 2 − 2xy − 4yz + 4y + 3 = 0,
hallar la ecuación del cilindro formado por las rectas tangentes a la cuádrica que son paralelas
a la recta x − y = 0 = 2x + z. Determinar el centro de la cónica de tangencia de la cuádrica y
el cilindro.
Número 89. Determinar los planos tangentes a la cuádrica afı́n 4x2 − 4y 2 + 8xz − 4x + 9 = 0
de A3 que son paralelos al plano x + 2y = 0.
Número 90.
Clasificar las cónicas afines definidas por las ecuaciones siguientes:
(a)
(b)
(c)
(d)
Número 91.
x2 + y 2 + 4x − 8y + 4 = 0.
4x2 + y 2 − 4xy − 2y + 4 = 0.
y 2 + xy + 2x − 2y − 6 = 0.
x2 + 4y 2 − 4xy + 2x − 4y − 3 = 0.
(1) Clasificar las cónicas proyectivas siguientes:
(a) −x20 + x21 − x22 + x0 x1 = 0.
(b) x20 + 3x22 + x0 x1 − 4x0 x2 − x1 x2 = 0.
(c) x20 + 2x21 − 2x22 − 2x0 x1 − 2x0 x2 + 6x1 x2 = 0.
(2) Clasificar las cónicas afines inducidas por las cónicas proyectivas anteriores en el plano
afı́n 2x0 − x1 + 3x2 6= 0.
Número 92.
proyectivas:
Clasificar las cuádricas siguientes del espacio afı́n A3 , ası́ como sus completadas
(a)
(b)
(c)
(d)
(e)
4x2 + z 2 − 2xy + 2y + 4 = 0.
x2 + z 2 − xy + 2xz − yz + x + 1 = 0.
x2 − y 2 + 4xz + 2yz + 2y − 2z − 1 = 0.
x2 + y 2 + 4z 2 − 2xy + 4xz − 4yz − 4y = 0.
x2 − 2z 2 − xz + x + z = 0.
13