método de los elementos finitos - Calculo Estructural II (IM-IME)
Anuncio
")
Compendio de Cálculo Estructural II – FCEFyN – UNC
J.Massa-J.Giro-A.Giudici - 2015
Capítulo 11
MÉTODO DE LOS ELEMENTOS FINITOS
1 INTRODUCCIÓN
La solución analítica exacta de las ecuaciones que gobiernan el comportamiento de cuerpos
deformables es de sumo interés en innumerables circunstancias para el ingeniero, pero la posibilidad de
acceder a la misma está seriamente limitada por la complejidad de los problemas de interés práctico.
En efecto, la geometría del cuerpo, las condiciones de borde o apoyo, los estados de carga y los
aspectos relacionados al comportamiento mecánico de los materiales hacen que con frecuencia las
soluciones exactas sean inaccesibles. Esta seria limitación, reconocida por físicos y matemáticos de
todos los tiempos, llevó al desarrollo de técnicas o teorías aproximadas destinadas a la resolución
de problemas específicos de la mecánica de sólidos elásticos. Así, surgió la teoría de vigas, con la
hipótesis de que las secciones planas permanecen planas y normales al eje deformado, las teorías de
placas planas en flexión, como una generalización de la teoría de vigas a dos dimensiones y luego
las teorías de láminas o cáscaras curvas, entre otras. Estas teorías fueron posteriormente modificadas
o ampliadas para cubrir un mayor número de casos de interés práctico, pero a pesar de ello subsisten
muchísimos problemas que no pueden ser resueltos satisfactoriamente con ellas.
Tanto estas teorías especiales como la teoría general de la elasticidad dan origen a sistemas
de ecuaciones diferenciales acopladas, donde interesa obtener su solución para condiciones de
carga, geometría y contorno más o menos arbitrarios con el mayor grado de generalidad posible.
Como respuesta a este problema surgieron los métodos de aproximación basados en consideraciones
energéticas, pudiendo citarse los métodos de Rayleigh-Ritz y Galerkin entre otros. Estos métodos
son procedimientos analíticos que proponen reemplazar la respuesta del sistema (campo de desplazamientos desconocido) por funciones de aproximación que sean relativamente simples (polinomiales
o armónicas), que deben cumplir ciertas condiciones de continuidad y además satisfacer las condiciones
de borde establecidas para el problema. Así es que se transforma el sistema de ecuaciones diferenciales
ordinarias o parciales que gobiernan el fenómeno en un sistema de ecuaciones algebraicas, cuyas
incógnitas representan los parámetros característicos de las funciones de aproximación adoptadas.
Aunque por ese camino se pueden resolver muchos problemas interesantes, se comprueba
que en los casos de estructuras complejas, ya sea por su geometría, condiciones de apoyo y/o
condiciones de carga, no es posible la determinación de una función de aproximación que conduzca
a la solución a través de un procedimiento sistemático que ofrezca cierta generalidad.
El último párrafo merece un comentario aparte. Debe notarse que la misión del ingeniero es
resolver problemas y para ello es necesario disponer de herramientas de aplicabilidad general, que
no requieran de un tratamiento específico y particular para cada caso que se presente. Esta es una
de las principales causas por las que fue abandonado el Método de las Diferencias Finitas, donde en
las ecuaciones diferenciales que representan un problema se reemplazan las derivadas por
expresiones incrementales, lo que conduce a un sistema de ecuaciones algebraicas. Las Diferencias
Finitas permiten resolver problemas estacionarios y transitorios con muy buena aproximación, para
lo cual debe tenerse la precaución de utilizar incrementos de las variables independientes de un
tamaño apropiado. Sin embargo, como contrapartida, se requiere un tratamiento específico para cada
caso particular, con muy pocas posibilidades de generalización, por lo que resulta muy costoso
introducir cambios en los modelos o reciclar soluciones de problemas similares.
Es en este contexto que hace su aparición el Método de los Elementos Finitos (MEF ),
favorecido por el vertiginoso desarrollo de la computación y destinado a provocar un trascendental
impacto en el cálculo estructural y posteriormente en todos los campos de estudio de los medios
continuos. Puede afirmarse, sin temor a exagerar, que muchas de las estructuras concebidas en los
últimos cuarenta años hubiesen sido impracticables de no contarse con una herramienta de cálculo
como lo es el Método de los Elementos Finitos. Para brindar un ejemplo, las estructuras de los
aviones de fuselaje ancho solo fueron posibles al poder determinarse los campos de tensiones con
gran detalle, lo que condujo a estructuras más confiables y livianas.
Como introducción general, puede decirse que el método de los elementos finitos permite
obtener la solución de un problema mediante la descomposición del objeto estudiado en un gran
201
Compendio de Cálculo Estructural II – FCEFyN – UNC
J.Massa-J.Giro-A.Giudici - 2015
número de constituyentes básicos o elementos, los que se interconectan a través de puntos denominados nodos. Esto se basa en el hecho de que es posible de determinar numéricamente el comportamiento físico de cada uno de estos elementos, a partir de las ecuaciones propias del problema
tratado y de las condiciones de contorno adyacentes. Luego, una vez determinadas las propiedades
de cada elemento, éstas son combinadas para posibilitar la representación de la estructura completa
y evaluar su comportamiento. La solución del problema provee los desplazamientos de estos nodos,
y a partir de ellos, las deformaciones y las tensiones del sistema estudiado.
Nótese que esto ya fue realizado en un curso anterior al ensamblarse estructuras de elementos
prismáticos a través de una formulación matricial con el Método de la Rigidez, por lo que puede decirse que el
método de los elementos finitos es una evolución o generalización del Cálculo Matricial de Estructuras,
e históricamente de hecho lo fue. Inversamente, y desde una óptica general, podría reconocerse a
las barras prismáticas como elementos finitos de una sola dimensión. Así ambos, el Método de los
Elementos Finitos y el Cálculo Matricial de Estructuras exhiben la cualidad de la que carecía el
método de las Diferencias Finitas: su aplicabilidad sistemática.
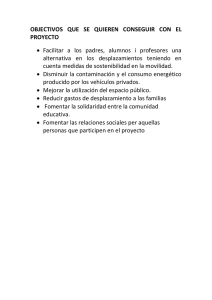
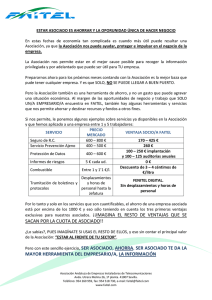
A título de ejemplos se muestran dos modelos de elementos finitos. En la Figura 1 se representan
dos piezas deslizantes y en la Figura 2 el modelo de una biela de un motor de combustión interna.
Superficie de contacto
Figura 1: Dos piezas deslizantes con superficie
de contacto cilíndrica
Figura 2: Modelo de una biela de un motor
de combustión interna
Para estudiar las piezas deslizantes de la Figura 1 puede asumirse que la profundidad es muy
grande y basta con representar un corte en un plano transversal de las mismas, por tratarse de lo que
es denominado estado plano de tensión. Para ello se utilizan elementos finitos de dos dimensiones,
tales como los triángulos y cuadriláteros, en lugar de tener que representar la totalidad del sólido, lo
que implica una enorme reducción en la complejidad del modelo. Por el contrario, la biela de la
Figura 2 esta sometida a condiciones de trabajo que obligan a desarrollar un modelo espacial con
elementos 3D que represente fielmente los alojamientos del perno de pistón y cojinete de bancada,
reproduzca las irregularidades geométricas que seguramente dan lugar a concentración de tensiones
y permita aplicar las condiciones de carga distribuidas sobre superficies de contacto.
2 BREVE RESEÑA HISTÓRICA
En realidad, esta forma de abordar un problema físico fue propuesta hace ya varios siglos, pero
su efectiva puesta en práctica debió esperar hasta la disponibilidad de las primeras computadoras.
Las elevadas exigencias de cálculo inherentes a este enfoque, en especial cuando se trabaja con
modelos tridimensionales, restringían su aplicación manual a casos muy simples. No es por lo tanto
una coincidencia que el Método de los Elementos Finitos haya comenzado a utilizarse tan pronto se
dispuso de computadoras y de lenguajes superiores de programación ( Backus et al., 1956). A partir
de allí, la incesante evolución de la tecnología ofreciendo procesadores más rápidos, mayores
capacidades de memoria y compiladores más eficientes favoreció la amplia difusión del método de
los elementos finitos y la posibilidad de tratar modelos de dimensiones asombrosas. A esto debe
sumarse la contribución de la evolución experimentada en otros campos, como son el análisis
numérico y la computación gráfica. Mucho más recientemente, el procesamiento paralelo suma un
nuevo recurso que tendrá un fuerte impacto, hoy insospechado, en el cálculo estructural y procesos
de simulación de los próximos años.
202
Compendio de Cálculo Estructural II – FCEFyN – UNC
J.Massa-J.Giro-A.Giudici - 2015
Volviendo a la historia del MEF, se reconoce como precursores a Duncan y Collar, quienes
en 1930 presentaron una formulación matricial destinada a resolver problemas aeroelásticos. Ellos
mismos fueron luego autores de los primeros dos artículos sobre el tema (Duncan y Collar, 1934 y
1935) y presentaron juntamente con Frazer un libro que introdujo la terminología que es aún hoy
utilizada (Frazer, Duncan y Collar, 1938). Llegaron luego los aportes de McHenry (1943) y la
publicación de una serie de artículos en la que Argyris presentó un enfoque matricial de los métodos
de las fuerzas y rigidez que se apoyó en los teoremas energéticos. Argyris también insinuó que su
enfoque matricial podría ser extendido mas allá de las barras prismáticas, para considerar elementos
estructurales de dos y tres dimensiones (Argyris y Kelsey, 1955). A los pocos años Turner (1959)
trabajó en un modelo aeroelástico de un ala delta en el que empleó barras y elementos triangulares
para repre-sentar su recubrimiento, lo que constituyó una de las primeras aplicaciones prácticas del
método para la resolución de problemas reales. Además, propuso al método de los desplazamientos
como el camino más apropiado para una implementación sistemática y eficiente del nuevo
procedimiento de cálculo.
Hasta ese momento, la implementación del análisis matricial de estructuras primero y del
método de los elementos finitos después daba lugar a dos enfoques posibles según el orden en que
se formulaba el problema matemático y en consecuencia cuales eran las incógnitas principales
resultantes: desplazamientos o fuerzas. Finalmente, el Método de la Rigidez con los desplazamientos
como incógnitas principales demostró ser el más apropiado para su implementación en computadora,
tal como lo comprobó Turner, y quedo de hecho establecido. Sin embargo, hubo prestigiosos autores
que insistieron por mucho tiempo con las bondades del Método de las Fuerzas (Robinson, 1973)
y también quienes propusieron una combinación de desplazamientos y fuerzas como incógnitas
principales, reunidas en lo que fue llamado “vector de estado”.
Este último método de incógnitas combinadas, denominado de Matrices de Transferencia,
estaba inspirado en la técnica propuesta por Holzer (1921) para el análisis dinámico de cigüeñales,
fue extendido por Myklestad (1944) al estudio de vigas en flexo torsión y posteriormente planteado
matricialmente por Pestel y Leckie (1963). Si bien se trata de un método conceptualmente muy
interesante, es muy difícil de sistematizar para tratar estructuras de geometría compleja, por lo que
fue prácticamente abandonado.
El Método de los Elementos Finitos se desarrolló entonces en base a los desplazamientos como
incógnitas principales y su nombre “elementos finitos” fue empleado por primera vez por Clough
en 1960. Posteriormente, los libros presentados por Przemieniecki (1968) y Zienkiewicz (1967 y
1994) contribuyeron enormemente a la difusión del método en los ámbitos universitarios e industriales.
El mismo Zienkiewicz junto a otros autores (Cheung y Taylor) presentó una interpretación amplia
del método de los elementos finitos en la que extiende su aplicación a diversos problemas de campos.
Naturalmente, se ha hecho de una reseña histórica muy breve que omite a numerosísimos
investigadores que hicieron sustanciales aportes para que el Método de los Elementos Finitos cubra
en la actualidad todo el espectro de problemas de la mecánica del continuo, y lo haga eficazmente,
convirtiéndose en una herramienta esencial para la ingeniería moderna.
Sin embargo, no sería justo terminar esta reseña sin mencionar a los prestigiosos profesores
Edgard Wilson y Klaus Bathe, de la Universidad de California, Berkeley. Wilson desarrolló uno de
los primeros sistemas integrales para la aplicación práctica del Método de los Elementos Finitos,
denominado SAP -Structural Analysis Program, (Wilson, 1970). Posteriormente se incorporó Bathe al
grupo de trabajo y con su aporte se completó el proyecto en 1972, denominado SAP IV. Ambos,
Bathe y Wilson, desarrollaron luego un nuevo sistema de cálculo denominado NONSAP (Bathe,
Wilson,Iding, 1974) que contemplaba materiales no lineales, grandes deformaciones y grandes
desplazamientos. También cabe destacar que ambos fueron autores de un libro titulado “Numerical
Methods in Finite Element Analysis” (1976) en el que sintetizan sus experiencias y que se convirtió
rápidamente en un clásico.
El mérito de Bathe y Wilson estuvo tanto en la calidad de sus trabajos como en su distribución
gratuita en todo el mundo, incluyendo los programas fuentes, posibilitando que el Método de los
Elementos Finitos salga de los ámbitos académicos y se incorpore como herramienta práctica de
uso habitual en las oficinas de proyecto de ingeniería.
203
Compendio de Cálculo Estructural II – FCEFyN – UNC
J.Massa-J.Giro-A.Giudici - 2015
3 MODELOS DISCRETOS
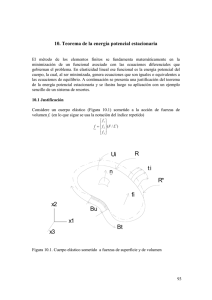
El proceso de resolver un problema de ingeniería a través de una computadora se presenta en
el esquema de la Figura 3. Para comenzar, el problema físico debe ser idealizado a través de un modelo
conceptual que debe preservar las características esenciales de la realidad y descartar toda otra
característica que no tenga incidencia significativa en el caso estudiado. Estas características incluyen
el comportamiento de la estructura (desplazamientos grandes o pequeños), tipos de cargas (estáticas
o dinámicas), propiedades del material (linealidad, elasticidad, isotropía, etc.), complejidad geométrica
(2D, 3D, etc.), condiciones de apoyo (concentradas, distribuidas, etc.) y otras condiciones de trabajo
que formen parte del problema (movimientos de apoyos, variación térmica, rozamiento, etc.).
Idealización
Sistema
Físico
Modelo
Conceptual
Discretización
Modelo
Matemático
Solución
Modelo
Discreto
Solución
Discreta
Errores de la
Solución
Errores de la Discretización y Solución
Errores de la Formulación Matemática, Discretización y Solución
Errores de la Idealización, Formulación Matemática, Discretización y Solución
Verificación
Validación
Figura 3: Proceso de resolución de un problema de ingeniería
La definición correcta de esta etapa es fundamental para entender y delimitar el fenómeno
estudiado y puede conducir a dos situaciones extremas: i) modelos incapaces de representar adecuadamente el problema estudiado y ii) modelos innecesariamente complejos. En el primer caso se han
ignorado características esenciales en el desarrollo del modelo y éste no será capaz de brindar
resultados correctos referidos al problema planteado, con el consiguiente riesgo que esto implica.
En el segundo caso ocurre lo contrario, es decir se han preservado características no relevantes y/o
un nivel de detalle innecesario, lo que dificulta la determinación de la solución, la hace muy costosa o
contribuye a confundir comportamientos importantes con otros que no lo son.
Una vez disponible el modelo conceptual se llega a la segunda etapa, en la que se propone una
formulación matemática para resolver el problema físico, que ya ha sido convenientemente delimitado.
Para ello, y en el caso de la mecánica del sólido continuo, se recurre a las denominadas ecuaciones
fundamentales de la elasticidad: ecuaciones de equilibrio, relaciones cinemáticas y ecuaciones
constitutivas, las que normalmente conducen a una formulación matemática del problema a través
de un sistema de ecuaciones diferenciales. Con el fin de poder alcanzar este modelo matemático es
muchas veces necesario simplificar aún más el modelo conceptual y/o definir con claridad su alcance
dentro del rango de las variables independientes del problema estudiado.
204
Compendio de Cálculo Estructural II – FCEFyN – UNC
J.Massa-J.Giro-A.Giudici - 2015
Tal como ya fue comentado con anterioridad, el modelo matemático no puede ser planteado en
forma integral para dominios de interés práctico, quedando esta posibilidad reservada solo a casos muy
simples. Para superar esta dificultad se transforma al modelo matemático en un modelo discreto, ya sea
a través de diferencias finitas o a través de método de los elementos finitos. En el primer caso, como ya
fue anticipado, la formulación diferencial es convertida en un sistema de ecuaciones algebraicas al
introducir fórmulas de derivación numérica. En el segundo el sólido elástico es descompuesto en
elementos simples y es aquí muy importante seleccionar los tipos de elementos apropiados para
representar el comportamiento del objeto estudiado. Luego es necesario disponer los elementos
formando mallas de elementos, establecer sus condiciones de apoyo y definir las cargas actuantes, todas
las cuales deben ser discretizadas en concordancia con los tipos de elementos utilizados.
Finalmente, la última etapa corresponde a la obtención de la solución, que normalmente
incluye la resolución de grandes sistemas de ecuaciones algebraicas que conducen a la determinación de desplazamientos, que son las incógnitas primarias del problema. Posteriormente se
obtienen las incógnitas secundarias, representadas por las solicitaciones, reacciones de apoyos,
deformaciones y tensiones. En el caso del estudio de la respuesta de estructuras en el dominio del
tiempo la solución incluye el cálculo de frecuencias y modos de vibración (autovalores y autovectores)
y la integración numérica de sus ecuaciones dinámicas.
Nótese que cada una de las etapas tiene características muy particulares y son por si mismas
fuentes de errores, todos los cuales contribuyen a desviaciones de los resultados respecto de los que
corresponden al problema real.
Como se puede comprobar, los errores tienen orígenes diversos y para identificarlos es
necesario tener en claro los conceptos de “validación” y “verificación”. La verificación se refiere a
la comprobación de que el problema ha sido correctamente resuelto, teniendo esencialmente que
ver con su formulación matemática, discretización y resolución numérica. La validación, por el
contrario, tiene que ver con que el problema resuelto sea el correcto. Es decir, asegurar que no se
haya resuelto correctamente un problema que en realidad no es el problema planteado. El proceso
de validación se refiere a la comprobación de que el modelo conceptual estudiado responde al
problema físico, es decir que el modelo rescata de la realidad todas sus características esenciales.
En resumen, la comprobación de que se estudió el problema correcto es el objetivo de la validación
y de que se alcanzaron las soluciones correctas es el objetivo de la verificación. Esto último podría
ser consecuencia de una formulación matemática errónea, una mala discretización, el uso de un
algoritmo inapropiado, un error de programación, un problema numérico que condujo a una
excesiva propagación de errores, etc.
Una vez planteado el proceso tendiente a la obtención de la solución de un problema, la
comprobación de su correctitud y la identificación de las causas de errores, es oportuno reconocer
otro concepto muy vinculado a los problemas y es el de su complejidad. El concepto de complejidad
admite diferentes interpretaciones según el punto de vista considerado. Estas son: i ) Complejidad
del problema, que es inherente al objeto estudiado, ii ) Complejidad cognitiva, que se refiere al
esfuerzo requerido para entender el problema, iii ) Complejidad matemática, que es la naturaleza de
la formulación involucrada, iv ) Complejidad algorítmica, que refleja la dificultad que ofrece el
proceso adoptado para alcanzar la solución, v) Complejidad estructural, que es la composición del
software usado para implementar los algoritmos y vi ) Complejidad operativa, que es una medida
del esfuerzo que demanda alcanzar la solución del problema. Desde un punto de vista informático,
intuitivamente se asocia la complejidad operativa con los recursos de cómputo requeridos para
resolver un problema, es decir espacio de memoria y tiempo de proceso.
Como se comprueba, cualquiera sea la interpretación de complejidad, se trata de un indicador
difícilmente cuantificable salvo en el caso de la complejidad operativa, motivo por el cual esta ha
sido intensamente estudiada y ha dado lugar a una disciplina denominada Teoría de la Complejidad
Computacional. A partir de sus indicadores, y bajo ciertas precauciones que aseguren que sus
valores puedan ser comparables, se los utiliza para evaluar otras interpretaciones de la complejidad,
como la matemática y la algorítmica. Los indicadores de complejidad operativa, el espacio de
memoria y tiempo de proceso, son los factores que impidieron la utilización de los elementos
finitos hasta que se dispuso de medios automáticos de cálculo con capacidades acordes a los
requerimientos de los problemas de interés práctico.
205
Compendio de Cálculo Estructural II – FCEFyN – UNC
J.Massa-J.Giro-A.Giudici - 2015
4 PUNTOS DE VISTA EN EL ESTUDIO DE LOS ELEMENTOS FINITOS
Como ya fue mencionado, la idea general del método de los elementos finitos es la división
de un dominio continuo en un conjunto de pequeños elementos interconectados por una serie de
puntos llamados nodos, donde las ecuaciones que gobiernan el comportamiento del dominio
completo gobernarán también el de cada uno de los elementos.
Este proceso de discretización permite pasar de un sistema continuo de infinitos grados de
libertad, que es regido por una ecuación diferencial o un sistema de ecuaciones diferenciales, a un
sistema discreto con un número de grados de libertad finito y cuyo comportamiento se representa
por un sistema de ecuaciones algebraicas, que pueden ser lineales o no.
A partir de esta descripción general se advierte que el estudio del método de los Elementos
Finitos puede ser abordado con diferentes objetivos desde tres diferentes puntos de vista que se
describen a continuación.
4.1 Utilización de sistemas en la resolución de problemas de ingeniería
Existen sistemas de cálculo generales que son aptos para abordar los más diversos tipos de
problemas y hay también otros más específicos, destinados a resolver problemas particulares. Los
sistemas generales prevén el análisis estático y dinámico de estructuras, la determinación de desplazamientos, solicitaciones y tensiones. Es decir se trata de sistemas destinados al análisis de estructuras.
Por el contrario, los sistemas específicos incluyen también opciones de diseño estructural según las
previsiones de normas e incluyen verificación del cumplimiento de las mismas. Además, disponen
de elementos específicos, facilidades para las definiciones de las condiciones de carga y la emisión
de los correspondientes diagnósticos. Pueden citarse como ejemplos los sistemas de análisis y
diseño de torres metálicas y los de cañerías.
Los sistemas de Elementos Finitos, ya sean generales o específicos, se han convertido en una
herramienta insustituible para el ingeniero y su utilización exige un profundo conocimiento de las
facilidades de cálculo disponibles, sus alcances y limitaciones. En efecto, es necesario poder seleccionar
los elementos más apropiados para cada caso, establecer los apoyos, definir las condiciones de carga
y finalmente interpretar los resultados. Para esto último se dispone normalmente de facilidades para
su representación gráfica.
4.2 Desarrollo de sistemas de cálculo
A pesar de la gran oferta de sistemas de análisis estructural de variado alcance, no debe
descartarse la posibilidad de tener que desarrollar un sistema específico para estudiar problemas
particulares. En estos casos se restringe la generalidad del sistema con el fin de abordar en análisis
y diseño de estructuras especiales que deben responder a normas particulares. Aquí debe tenerse en
cuenta que el desarrollo de sistemas requiere un profundo conocimiento de tres disciplinas básicas;
que son: i ) el cálculo estructural, ii ) el análisis numérico y iii ) la programación de computadoras.
Aún a pesar de la ya mencionada disponibilidad de variados sistemas de análisis y diseño
estructural, el desarrollo de nuevos sistemas, en muchos casos de dimensiones reducidas, también
se justifica ampliamente en ámbitos universitarios y de investigación por brindar la oportunidad de
conocer el problema en profundidad y desarrollar aptitudes para la obtención de mejores rendimientos
a través del mejor aprovechamiento de los recursos tecnológicos disponibles. El aprovechamiento
efectivo del procesamiento paralelo sirve de ejemplo en este sentido.
4.3 Desarrollo de nuevos elementos
Un dominio es discretizado a través de elementos que deben ser seleccionados según las
características y propiedades que se desea preservar en el modelo. Para ello debe disponerse de una
amplia variedad de elementos y su desarrollo constituyó un activo campo de investigación durante
muchos años. En la actualidad se busca desarrollar nuevos elementos que mejoren el comportamiento
de elementos existentes, ya sea porque conducen a la obtención de resultados similares con modelos
más simples o porque permiten mejorar la calidad de los mismos. También se trabaja en el desarrollo de
elementos para tratar problemas muy especiales, como son el caso de la propagación de grietas,
representación de materiales compuestos, análisis plástico, no lineal, etc.
206
Compendio de Cálculo Estructural II – FCEFyN – UNC
J.Massa-J.Giro-A.Giudici - 2015
5 CONCEPTOS GENERALES DEL MÉTODO DE LOS ELEMENTOS FINITOS (MEF)
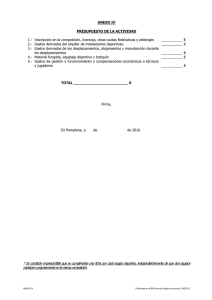
En las secciones anteriores se ha descripto la idea general de dividir un dominio continúo en
un conjunto discreto de subdominios interconectados. Eso es ejemplificado en la Figura 4 para el
caso de una planchuela plana cargada en su mismo plano y que se aprovecha para definir la
terminología de uso habitual en el tratamiento de este tema:
Elementos: subdominios elementales continuos que son tratados mediante las ecuaciones de la
elasticidad y utilizados para representar el objeto de estudio.
Nodos: Puntos característicos en función de los cuales se definen las propiedades elásticas de los
elementos y permiten vincular diferentes elementos entre sí.
Mallas: Ensamble de elementos destinados a reproducir un cierto medio continuo a través de un
modelo discreto.
Grados de Libertad de un nodo: Número mínimo de parámetros necesarios para definir completamente la posición de un nodo.
Grados de Libertad de un elemento: Cantidad de parámetros a través de los cuales se expresan las
propiedades elásticas de un elemento, lo que significa que es el orden de su matriz de rigidez.
Grados de Libertad de un modelo discreto: Total de grados de libertad de los nodos de una malla
de elementos menos los grados de libertad que están restringidos por condiciones de apoyo, ya sean
fijos o de movimientos predefinidos. Representa el orden de la matriz de rigidez de la estructura.
Condición de carga: Conjunto de acciones aplicadas sobre el objeto estudiado.
A título de ejemplo, la planchuela de la Figura 4 da lugar a un estado plano de tensión, por lo
que cada nodo tiene dos grados de libertad (desplazamientos en dos direcciones ortogonales) y los
elementos triángulo empleados en el modelo tienen seis grados de libertad cada uno. El modelo
tiene un total de 31 nodos y 56 grados de libertad (31 x 2 – 3 x 2 = 56), con una malla formada por 43
elementos del mismo tipo. Nótese que los elementos han sido dispuestos de manera de reproducir
el contorno del dominio de la mejor manera posible, lo que obviamente depende de la cantidad de
elementos utilizados. El mejor modelo será el más simple que permita obtener resultados correctos,
con errores máximos acordes a los objetivos planteados para el análisis.
Discretización
Objeto estudiado
Modelo discreto
Figura 4: Dominio plano y su modelo discreto
5.1 Funciones de aproximación
Un término adicional que debe ser introducido es el de función de desplazamiento o de
aproximación, que se refiere a la función adoptada para representar el comportamiento de los
desplazamientos dentro de cada tipo de elemento. Su importancia reside en que el MEF es
implementado a través del método de la rigidez, con los desplazamientos de los nodos como
incógnitas principales, y las distribuciones de desplazamientos, deformaciones y tensiones en el
interior de los elementos dependerá de los valores resultantes en los desplazamientos de los nodos
y de la función de aproximación adoptada en la formulación del método. Por tal motivo, es
necesario disponer de una expresión que permita conocer los desplazamientos de cualquier punto
del elemento a partir de su posición y de los desplazamientos de sus nodos que lo definen.
207
Compendio de Cálculo Estructural II – FCEFyN – UNC
J.Massa-J.Giro-A.Giudici - 2015
Para estas funciones de aproximación se utilizan normalmente polinomios, que ofrecen dos
ventajas importantes: i ) son fáciles de manipular matemáticamente; evaluar, derivar, integrar, etc. y
ii ) a medida que aumenta el grado del polinomio la solución debería converger asintóticamente a la
del medio continuo representado, lo que implica que un polinomio de grado infinito permitirá
obtener una solución exacta. Las funciones de aproximación polinomial de grado “n” para el
problema de dos dimensiones del ejemplo de la Figura 4 responden a las siguientes expresiones:
u1 ( x1 , x2 ) = α10 + α11 x1 + α12 x2 + α13 x1 x2 + α14 x12 + α15 x22 + ... + α1m−1 x1n + α1m x2n
u 2 ( x1 , x2 )= α 20 +α 21 x1 +α 22 x2 +α 23 x1 x2 +α 24 x1 +α 25 x2 +...+α 2 m−1 x1 +α 2 m x2
2
2
n
n
(1)
Las consideraciones realizadas conducen a pensar en la conveniencia de adoptar polinomios
de grado elevado. Sin embargo, al aumentar el grado “n” de los polinomios aumenta también la
cantidad de constantes αik (i = 1,2..; k = 0,1..,m) que son necesarias para su definición, y estas
constantes deben obtenerse a partir de las incógnitas principales del problema, es decir los desplazamientos de los nodos incluidos en el elemento. Esto significa que los elementos deben contener
una cantidad de nodos acorde al grado de la función de aproximación, de manera de hacer posible
la determinación de esos coeficientes. En conclusión, aumentar el grado de la función de aproximación mejora la calidad de la solución y a la vez aumenta los nodos y grados de libertad de los
elementos, lo que conduce a modelos más complejos, por lo que es necesario encontrar una solución de
compromiso. Para ilustrar el tema se presenta a continuación un ejemplo con un caso muy simple.
Ejemplo 1
Se adopta una función de aproximación lineal para un elemento triángulo plano similar a los
utilizados en el modelo de la Figura 5 y se desea expresar los desplazamientos de cualquier punto
del dominio en función de los desplazamientos de los nodos.
k
x2
p(x1, x2)
α10 + α11 x1p + α12 x2p
u1p ( x1 , x2 ) =
(2)
j
u ( x1 , x2 ) =α 20 + α 21 x + α 22 x
p
2
p
1
p
2
i
x1
Figura 5: Elemento triángulo plano y sus funciones de aproximación lineal
Nótese que en la definición de los símbolos que representan las posiciones y desplazamientos
de los nodos el subíndice define la dirección y el supraíndice define el punto considerado. Las
expresiones (2) son aplicables en todos los puntos del dominio y por lo tanto pueden aplicarse a los
vértices del triángulo, cuyos desplazamientos son conocidos. Se obtiene así el siguiente sistema de
ecuaciones lineales:
u1i ( x1 , x2 ) =α10 + α11 x1i + α12 x2i
j
j
j
u2i ( x1 , x2 ) =α 20 + α 21 x1i + α 22 x2i
j
j
j
u1 ( x1 , x2 ) =
α 10 +α 11 x1 +α 12 x2
u 2 ( x1 , x 2 ) =
α 20 +α 21 x1 +α 22 x2
u1k ( x1 , x2 ) =α10 + α11 x1k + α12 x2k
u2k ( x1 , x2 ) =α 20 + α 21 x1k + α 22 x2k
(3)
Estas ecuaciones son expresadas en forma matricial y reordenada en (4), de manera de
expresar a las incógnitas en función de los desplazamientos de los nodos y sus posiciones. Las
incógnitas del problema son los coeficientes α ik que definen las funciones de aproximación (2).
208
Compendio de Cálculo Estructural II – FCEFyN – UNC
J.Massa-J.Giro-A.Giudici - 2015
α10 1 x1i
α11 0 0
α12 1 x1j
=
α 20 0 0
α 21 1 x1k
α 22 0 0
x2i 0
0
x2j
0
1
0
1
0
1
x2k
0
0
x2i
0
x2j
0
x2k
0
x1i
0
x1j
0
x1k
−1
u1i
i
u2
u1j
j
u2
u k
1k
u2
(4)
que en forma resumida puede presentarse como
{α } = [ X ] { u }
−1
(5)
donde la matriz “X ” esta compuesta por las posiciones de los vértices del triángulo. Tal como fue
planteado, la determinación de los coeficientes “α ” involucra la inversión de “X ”, cuyo orden es
igual a la cantidad de grados de libertad del elemento, y estos coeficientes permiten conocer los
desplazamientos de cualquier punto del dominio según lo expresa (2).
5.2 Funciones de aproximación en coordenadas triangulares
La necesidad de invertir la matriz “X ”, una operación matricial que normalmente se desea
evitar, llevó a explorar alternativas para definir las funciones de aproximación de manera más
directa. Algunas de ellas son muy ingeniosas, y para el caso de elementos triangulares se propuso
hacerlo a través de coordenadas triangulares, que se definen a continuación.
a1i
x2
k
( j)
Aj
i
Ai
(i )
a 2i
p
Ak
(k)
j
x1
Figura 6: Elemento triángulo plano. Simbología utilizada en coordenadas triangulares
Los nodos del triángulo son identificados como “i”, “j”, “k”, ordenados en un cierto sentido, en
este caso antihorario. A su vez, se asigna la misma denominación a los lados opuestos de los nodos,
mostrados en la Figura 6 entre paréntesis. Por ultimo, las componentes horizontal y vertical de cada
uno de los lados del triángulo son identificados con la letra “a”, donde el subíndice corresponde a
la dirección y el supraíndice al cateto correspondiente. Así, todos los lados del triángulo quedan
definidos por las siguientes componentes:
a1i =
x1k − x1j ;
a2i =
x2k − x2j
a1j =
x1i − x1k ;
a2j =
x2i − x2k
a =
x −x ;
a =
x −x
k
1
j
1
i
1
k
2
j
2
(6)
i
2
Nótese que todo punto arbitrario “p” perteneciente al dominio define sobre el triángulo tres
zonas, cuyas áreas son identificadas como Ai, Aj y Ak , siendo Ai +Aj +Ak = A el área total del
triángulo. A partir de los valores de estas áreas se definen las llamadas coordenadas triangulares,
que son las siguientes:
=
ζ i ( x1 , x2 )
Ai
, ζ j ( x1 , x2 )
=
A
Aj
, ζ k ( x1 , x2 )
=
A
Ak
A
(7)
y de acuerdo a como están definidas, no se trata de tres coordenadas independientes ya que
209
Compendio de Cálculo Estructural II – FCEFyN – UNC
J.Massa-J.Giro-A.Giudici - 2015
ζ i ( x1 , x2 ) + ζ j ( x1 , x2 ) + ζ k ( x1 , x2 ) =
1
(8)
Disponiendo de estas coordenadas triangulares, se las puede emplear para definir funciones
de aproximación destinadas a expresar los desplazamientos de cualquier punto del dominio a partir
de los desplazamientos de sus vértices (nodos).
u1 ( x1 , x2 ) = u1i ζ i ( x1 , x2 ) + u1j ζ j ( x1 , x2 ) + u1k ζ k ( x1 , x2 )
u2 ( x1 , x2 ) = u2i ζ i ( x1 , x2 ) + u2j ζ j ( x1 , x2 ) + u2k ζ k ( x1 , x2 )
(9)
Es decir que, en lugar de quedar los desplazamientos definidos en función de los coeficientes
“α” de la expresión (2) y (4), se lo hace con las expresiones (9) y para ello se deben determinar las
coordenadas ζ. Estas se obtienen a través del algebra vectorial, tal como se muestra a continuación:
t1
t2
t3
Ai ( x1 , x2 ) = 1 ( jk × jp )= 1 a1i
a2i
0 = 1 ( x1j − x1 ) a2i − ( x2j − x2 ) a1i
2
2
2
x1 − x1j x2 − x2j 0
Aj ( x1 , x2 ) = 1 (ki × kp ) =
2
t1
1 aj
1
2
x1 − x1k
t2
a2j
x2 − x2k
t3
0 =
0
1 ( ij × ip )=
2
t1
1 ak
1
2
x1 − x1i
t2
a2k
x2 − x2i
t3
0 =
0
Ak ( x1 , x2 )=
1 ( x k − x ) a j − ( x k − x ) a j
1
2
2
2
1
2 1
(10)
1 ( xi − x ) a k − ( xi − x ) a k
2
2
1
2 1 1 2
Reemplazando (10) en (7) se obtienen las expresiones específicas para las coordenadas
triangulares que permiten definir las funciones de aproximación (9).
Ai
( x1j − x1 ) a2i − ( x2j − x2 ) a1i
=
2A
A
k
Aj
( x1 − x1 ) a2j − ( x2j − x2 ) a1j
ζ j ( x1 , =
x2 ) =
2A
A
Ak
( x1i − x1 ) a2k − ( x2i − x2 ) a1k
ζ k ( x1 ,=
x2 ) =
2A
A
ζ i ( x1 ,=
x2 )
(11)
Ejemplo 2
Se propone expresar en coordenadas triangulares las posiciones de los puntos “A”, “B”, “C” y
“D” mostrados en el triángulo representado en la Figura 7.
k
x2
P(ζ i , ζ j , ζ k )
B
C
A(⅓,⅓,⅓)
B(0,½,½)
A
j
C(½ , 0 , ½)
D
D(½,½,0)
i
x1
Figura 7: Identificación de posiciones de puntos usando coordenadas triangulares
Tal como fue expresado en la ecuación (8), no se trata de coordenadas independientes ya que
definen las posiciones de puntos en el plano a través de tres parámetros.
210
Compendio de Cálculo Estructural II – FCEFyN – UNC
J.Massa-J.Giro-A.Giudici - 2015
5.3 Funciones de aproximación y condiciones de convergencia
Se ha demostrado que las propiedades de rigidez de una estructura obtenidas a través del MEF
son mayores que las que corresponden a la solución exacta, lo que equivale a decir que los verdaderos
desplazamientos representan un límite superior para los que puedan obtenerse a través de diferentes
modelos discretos. En estas condiciones, es de esperarse que los desplazamientos brindados por los
diferentes modelos se aproximen asintóticamente, y en forma creciente, a los valores reales a medida
que la cantidad de elementos (y grados de libertad) crecen. Sin embargo, para asegurar esta tendencia
asintótica se deben cumplir tres condiciones básicas:
i) Las funciones de aproximación de los desplazamientos deben ser continuas dentro del dominio
y los desplazamientos de elementos adyacentes deben ser compatibles en los bordes.
ii) Las funciones de aproximación deben incluir el movimiento del sólido como un cuerpo rígido,
condición en que todas las deformaciones deben ser nulas.
iii) Las funciones de aproximación deben permitir la representación de condiciones de deformación
constante.
Las formulaciones de las funciones de aproximación que cumplen la condición i ) se dice que
son “compatibles” y las que satisfacen las condiciones ii ) y iii ) se dice que son “completas”. Sin
embargo, a pesar de que las tres condiciones son suficientes para asegurar convergencia, se ha
comprobado que con solo cumplir la tercera condición se pueden obtener resultados prácticos
aceptables. Mas específicamente, muchos elementos que no cumplen con el primer criterio, es decir
que sus funciones de aproximación son completas pero no compatibles, han sido ampliamente
utilizados con éxito. Los problemas que presentan los elementos no compatibles son esencialmente
dos: a) no se puede asegurar que su rigidez se encontrará siempre por encima de los valores
atribuidos a la solución exacta y b) el proceso de convergencia hacia la solución exacta puede no
existir o ser muy lento.
5.4 Consideraciones energéticas
Como es sabido, la energía potencial total Π de un sólido elástico es la suma de su energía
interna de deformación W y la energía potencial de las fuerzas exteriores U:
Π= W + U
(12)
donde la energía interna de deformación W se obtiene integrando la densidad de energía de
deformación en todo el volumen y el potencial U incluye la acción de fuerzas másicas y fuerzas de
superficie. Se obtiene así:
(13)
=
Π ∫ ω dV − ∫ F u dV − ∫ f u ds
V
V
S
El teorema de la Mínima Potencial Total establece que, de todos los campos de desplazamientos que cumplen con las condiciones geométricas de contorno, aquel que hace estacionario a Π
corresponde a un estado de equilibrio. Más aun, puede ser demostrado que en una condición de
equilibrio estable la energía potencial total de un sólido elástico no solo es estacionaria sino que es
mínima.
Luego, se asegura el equilibrio de un sólido elástico a partir de imponer las condiciones de
que las derivadas de Π con respecto a los desplazamientos de los nodos debe ser nula:
∂Π
=0
∂uk
(14)
Aquí cabe reconocer que, si la condición de equilibrio requiere un mínimo absoluto de la
energía potencial total, un modelo discreto con funciones de desplazamientos aproximadas siempre
tendrá un valor de Π que será superior al del sólido continuo. Podría esperarse que este valor tienda
al mínimo absoluto a medida que la cantidad de grados de libertad del modelo crece, pero para ello
es necesario que las funciones de aproximación de los desplazamientos cumplan con las condiciones
de convergencia ya establecidas en el punto anterior. De lo contrario, la condición de energía potencial
total mínima nunca podrá ser alcanzada.
211
Compendio de Cálculo Estructural II – FCEFyN – UNC
J.Massa-J.Giro-A.Giudici - 2015
6 DESARROLLO DE UN ELEMENTO BÁSICO DE DOS DIMENSIONES
Para mostrar la forma en que se define un elemento finito para obtener la expresión de su
matriz de rigidez se estudiará un triángulo destinado a representar un estado plano de tensión. Para
ello se comienza adoptando la función de aproximación de los desplazamientos, y en este caso se
opta por la forma más simple: una función lineal, tal como la que fue estudiada a través de las
coordenadas triangulares y fue expresada en (9). El elemento seleccionado tiene un espesor “h”, su
área es “A”, esta sometido a la acción de fuerzas másicas constantes en el interior del dominio y no
tiene cargas de superficie.
Se recuerdan ahora las ecuaciones fundamentales para el estudio del comportamiento de
sólidos elásticos: i ) equilibrio, ii ) constitutivas y iii ) cinemáticas. Estas ecuaciones son presentadas
a continuación para el caso en que las tensiones normales al plano del elemento son nulas, lo que
corresponde a un estado plano de tensión:
i) Ecuaciones de Equilibrio:
ii) Ecuaciones Constitutivas:
∂σ 11 ∂σ 21
+
+ F1 =
0
∂x1
∂x2
(15)
∂σ 12 ∂σ 22
+
+ F2 =
0
∂x1
∂x2
σ 11
E
σ 22 =
2
σ (1 − ν )
12
iii) Ecuaciones Cinemáticas:
=
ε11
1
ν
0
∂u1
=
; ε 22
∂x1
ν
1
0
0
0
1 −ν
2
∂u2
=
; ε12
∂x2
ε11
ε 22
γ
12
1
2
∂u2
∂u1
∂x + ∂x
1
2
(16)
(17)
6.1 Deformaciones en función de la distribución de desplazamientos
Como ya fue mencionado, para la definición del elemento triángulo se han propuesto funciones
de aproximación lineal expresadas en coordenadas triangulares definidas en (9). Para comenzar es
necesario expresar las deformaciones (17) en función de las expresiones de desplazamientos propuesta.
∂u1 ∂u1 ∂ζ i ∂u1 ∂ζ j ∂u1 ∂ζ k
ε11 ==
+
+
∂x1 ∂ζ i ∂x1 ∂ζ j ∂x1 ∂ζ k ∂x1
∂u2 ∂u2 ∂ζ i ∂u2 ∂ζ j ∂u2 ∂ζ k
ε 22 ==
+
+
∂x2 ∂ζ i ∂x2 ∂ζ j ∂x2 ∂ζ k ∂x2
(18)
1 ∂u1 ∂u2 1 ∂u1 ∂ζ i ∂u1 ∂ζ j ∂u1 ∂ζ k ∂u2 ∂ζ i ∂u2 ∂ζ j ∂u2 ∂ζ k
+
+
+
+
+
+
=
2 ∂x2 ∂x1 2 ∂ζ i ∂x2 ∂ζ j ∂x2 ∂ζ k ∂x2 ∂ζ i ∂x1 ∂ζ j ∂x1 ∂ζ k ∂x1
ε12 =
Derivando los desplazamientos u dados en (9) con respecto a las variables ζ y
derivando las coordenadas ζ dadas en (11) con respecto a las coordenadas cartesianas x se
obtiene (en notación indicial):
−1
2A
u m a2m
2A
−1
u mam
ε11 = u1i a2i + u1j a2j + u1k a2k =
− 1
− 2 1
ε 22 = u2i a1i + u2j a1j + u2k a1k =
2A
2A
ε12 =
u1m a1m − u2m a2m
4A
212
(19)
Compendio de Cálculo Estructural II – FCEFyN – UNC
J.Massa-J.Giro-A.Giudici - 2015
Es importante observar que los valores de las deformaciones obtenidas (19) son
independientes de las coordenadas del punto considerado, es decir que las deformaciones tienen un
valor constante en todo el interior del elemento. Esto es consecuencia del tipo de función de
aproximación usada, en este caso lineal. Además, de acuerdo a las ecuaciones constitutivas (16)
también serán constantes las tensiones en el interior del dominio.
Si se fijan valores arbitrarios a las deformaciones ε11, ε22 y ε12 debería ser posible despejar de
las ecuaciones (19) los valores de los desplazamientos que producen tales deformaciones. Pero, por
ser tres las deformaciones y seis los desplazamientos existen infinitos juegos de desplazamientos
capaces de cumplir tales condiciones. La indeterminación de los desplazamientos es de grado tres y
para ser superada deben fijarse las componentes del desplazamiento del cuerpo rígido en el plano.
También es importante observar que las funciones de aproximación propuesta para los
desplazamientos son continuas en los límites entre elementos vecinos para cualquier conjunto de
valores de desplazamientos nodales. Por el contrario, las deformaciones son constantes en cada
elemento y presentarán una discontinuidad en los límites entre ellos.
6.2 Energía de deformación
La energía interna de deformación para el caso de un solidó linealmente elástico resulta:
W = 1 ∫ σ ij ε ij dV
2
(20)
V
que expresa en notación indicial una suma de nueve términos, que se reduce a tres para el caso en
que una de las tensiones es nula. Se integra sobre el área por tratarse de un elemento de espesor “h”
constante:
1 (σ ε + σ ε + 2σ ε ) h dA
W
=
n
22 22
12 12
2 ∫ 11 11
(21)
A
Reemplazando las tensiones por las deformaciones con las ecuaciones constitutivas (16):
=
Wn
E
2(1 − ν 2 )
∫ ε
2
11
+ ε 22 2 + 2 ν ε12ε12 + 2(1 − ν 2 ) ε12 2 h dA
(22)
A
e integrando sobre toda el área del triángulo se obtiene una expresión aproximada para la energía
potencial. Como ya fue mencionado, y a raíz del tipo de función de aproximación utilizada para
expresar los desplazamientos, las deformaciones (19) son constantes para todo el dominio.
=
Wn
hE A
ε 2 + ε 22 2 + 2 ν ε12ε12 + 2(1 − ν 2 ) ε12 2 )
2 ( 11
2(1 − ν )
(23)
6.3 Potencial de las cargas exteriores
El potencial de las cargas exteriores se compone de un término que proviene de las fuerzas
másicas por unidad de volumen (en este caso por unidad de área) y de otro que corresponde a las
fuerzas de contorno por unidad de superficie (en este caso por unidad del perímetro). Se tiene
entonces:
Un =
− ∫ ( F1 u1 + F2 u2 ) dA + ∫ ( f1 u1 + f 2 u2 ) dS
A
(24)
S
Considerando que son constantes a las fuerzas másicas en el interior del triángulo y que son
nulas las fuerzas de superficie sobre su contorno, resulta:
Un =
− F1 ∫ ( u1i ζ i + u1j ζ j + u1k ζ k ) dA − F2 ∫ ( u2i ζ i + u2j ζ j + u2k ζ k ) dA
A
(25)
A
Puede además demostrarse que:
ζ dA ∫=
ζ dA ∫=
ζ dA
∫=
1
A
2
A
3
A
213
A
3
(26)
Compendio de Cálculo Estructural II – FCEFyN – UNC
J.Massa-J.Giro-A.Giudici - 2015
Con lo que, una vez integrada la expresión (25) se obtiene:
Un =
−
F1 A i
FA
u1 + u1j + u1k ) − 2 ( u2i + u2j + u2k )
(
3
3
(27)
6.4 Mínima energía potencial total
Cuando un dominio continuo es representado por un modelo discreto compuesto por cierto
número de elementos, su potencial total resulta de sumar las contribuciones de las energías internas
de deformación y los potenciales de cargas exteriores de cada uno de ellos.
Π= W + U=
n
n
∑Wk + ∑U k
(28)
k 1=
k 1
=
Considerando en particular la contribución de un dado elemento a la energía potencial total y
aplicando el teorema que establece que esta energía será mínima cuando el sistema este en
equilibrio, se pueden establecer ecuaciones de equilibrio para cada uno de los grados de libertad:
∂Π
∂Π
∂Π
=
0=
;
0=
;
0
∂u1i
∂u1j
∂u1k
(29)
∂Π
∂Π
∂Π
0=
;
0=
;
0
=
∂u2i
∂u2j
∂u2k
Algunas de estas ecuaciones, por ejemplo las que corresponden al nudo “i ” en las direcciones
“x1” y “x2” se desarrollan de la siguiente manera:
∂Π
=
∂u1i
∂ε
∂ε
∂ε
∂ε ∂U
h E A ∂ε11
ε
+ ε 22 22i + ν ε11 22i + ν ε 22 11i + 2(1 − ν 2 ) ε12 12i + i
i
2 11
2(1 − ν )
∂u1
∂u1
∂u1
∂u1
∂u1 ∂u1
(30a)
∂Π
=
∂u2i
∂ε
∂ε
∂ε
∂ε ∂U
h E A ∂ε11
ε
+ ε 22 22i + ν ε11 22i + ν ε 22 11i + 2(1 − ν 2 ) ε12 12i + i
i
2 11
2(1 − ν )
∂u2
∂u2
∂u2
∂u2
∂u2 ∂u2
(30b)
A partir de las ecuaciones (19) se deduce que:
∂ε11
a2i
∂ε11
∂ε12
a1i
=
−
=
=
−
,
0
,
∂u1i
∂u1i
∂u1i
2A
4A
(31)
y reemplazando en las ecuaciones (30) y luego en las (29) se tiene:
∂Π
=
∂u1i
Eh
4 A(1 − ν 2 )
AFi
1 −ν m m
m m
i
m m
i
m m
i
−a1 u1 (−a2 ) + ν a1 u2 (− a2 ) + 2 (a1 u1 − a2 u2 )a1=
− 3
0
∂Π
=
∂u2i
Eh
4 A(1 − ν 2 )
1 −ν m i
1 − ν m i AFi
m i m
m
m i
a1 a2 ) −
u2 (a1 a1 ) + 2 a2 a2 ) − u1 (ν a2 a1 + 2=
3
0
(32)
y de la misma forma se obtienen las expresiones que corresponden a los restantes nodos “j ” y “k”,
totalizando las seis ecuaciones de equilibrio.
Los factores que multiplican a los desplazamientos nodales en estas ecuaciones de equilibrio
pueden ser interpretados como coeficientes de rigidez del elemento triangular “i-j-k ”, con un
sentido similar al de los coeficientes de rigidez de los elementos prismáticos (barras), que
establecen una relación entre los desplazamientos de los nodos y las fuerzas sobre los mismos.
6.5 Matriz de rigidez del elemento triángulo
Agrupando los factores de los desplazamientos de los nodos y expresando las ecuaciones
de equilibrio en forma matricial se tiene:
214
Compendio de Cálculo Estructural II – FCEFyN – UNC
kii11
21
kii
k 11ji
21
k ji
k 11
ki
kki21
kii12
kij11
kij12
kik11
kii22
kij21
kij22
kik21
k 12ji
k 11jj
k 12jj
k 11jk
k 22
ji
k 21
jj
k 22
jj
k 21
jk
kki12
kkj11
kkj12
kkk11
kki22
kkj21
kkj22
kkk21
J.Massa-J.Giro-A.Giudici - 2015
kik12
kik22
k 12jk
k 22
jk
kkk12
kkk22
u1i
F1i
i
i
u2
F2
j
u1j
A F1
j =
j
3 F2
u 2
k
u
F k
1k
1k
F2
u2
(33)
donde queda definida la matriz de rigidez de un elemento triangular de espesor constante y cuyos
desplazamientos en el interior del dominio son proporcionales a los desplazamientos de los nodos.
Al igual que en el caso de barras prismáticas, la matriz de rigidez es simétrica. Además, para un
conjunto de elementos triangulares la matriz de rigidez global del dominio se ensambla en forma
similar a la de un sistema de barras prismáticas, solo que considerando que ahora cada elemento
vincula entre sí tres nodos en lugar de dos. Los elementos de la matriz de rigidez responden a las
ecuaciones:
11
kim
=
Eh
m i 1 −ν m i
a a +
a1 a1
2 2 2
4 A(1 − ν )
2
12
kim
=
Eh
1 −ν m i
m i
kim21
a1 a2
=
− a2 a1ν +
2
4 A(1 − ν )
2
Eh
1 −ν m i
m i
a2 a1
− a1 a2ν +
2
4 A(1 − ν )
2
(34)
Eh
m i 1 −ν m i
kim22
a a +
a2 a2
=
2 1 1
4 A(1 − ν )
2
donde E y ν representan propiedades del material, h y A propiedades geométricas del elemento y
los coeficientes a son las componentes cartesianas de los lados del triángulo definidas en (6).
Ejemplo 3
Se determinan los coeficientes de la partición “4-4” de la matriz de rigidez del triángulo de
tensión constante que es representado en la Figura 8.
x2
90
10
11
k33
21
k33
k 11
K A = 43
21
k43
k 11
53
21
k53
5
4
3
20
80
x1
12
k33
k3322
12
k43
k4322
12
k53
k5322
11
k34
k3421
11
k44
k4421
11
k54
k5421
12
k34
k3422
12
k44
k4422
12
k54
k5422
11
k35
k3521
11
k45
k4521
11
k55
k5521
12
k35
22
k35
12
k45
k4522
12
k55
k5522
Figura 8: Elemento triángulo
4 4 1 −ν 4 4
3
5 2
3
5 2
2
2
α (−80) + (−60) β
a2 a2 + 2 a1 a1 =
α ( x2 − x2 ) + β ( x1 − x1 ) =
Eh
4 4 1 −ν 4 4
1 2
=
− a1 a2ν +
−α [ (−60) (−80)ν + (−80) (−60) β ]
k44
a2 a1 =
2
4 A(1 − ν )
2
k41 =14
Eh
4 A(1 − ν 2 )
4 4 1 −ν 4 4
−α [ (−80) (−60ν + (−60) (−80) β ]
− a2 a1ν + 2 a1 a2 =
Eh
4 4 1 −ν 4 4
3
5 2
3
5 2
α (−60) 2 + (−80) 2 β
a1 a1 +
a2 a2 =
α ( x1 − x1 ) + β ( x2 − x2 ) =
4 A(1 − ν 2 )
2
Eh
k442 1=
4 A(1 − ν 2 )
k42 =24
donde
α=
Eh
,
4 A(1 − ν 2 )
β=
1 −ν
2
215
Compendio de Cálculo Estructural II – FCEFyN – UNC
J.Massa-J.Giro-A.Giudici - 2015
7 OTROS ELEMENTOS DE USO CORRIENTE
7.1 Estados planos de tensión y deformación
El Triángulo de Tensión Constante desarrollado en detalle en el punto anterior es de gran utilidad
práctica y su implementación en programas de cálculo es relativamente sencilla. Sin embargo, en
muchos casos y para obtener un grado aceptable de aproximación deben emplearse mallas muy
densas, compuestas por un elevado número de elementos. Como alternativa pueden emplearse menor
número de elementos triángulo, desarrollados a partir de funciones de aproximación de grado más
elevado, como cuadráticas o cúbicas, y también elementos cuadriláteros con estas mismas funciones.
7.1.1 Triángulos de Tensión Lineal y Cuadrática
Como mejora del Triángulo de Tensión Constante (TTC) aparece el Triángulo de Tensión
Lineal, en el que se introducen polinomios de segundo grado para expresar los desplazamientos en
las dos direcciones ortogonales, u1 y u2, tales como:
u1 =a10 + a11 x1 + a12 x2 + a13 x12 + a14 x22 + a15 x1 x2
(35)
u2 =a20 + a21 x1 + a22 x2 + a x + a x + a24 x1 x2
2
23 1
2
24 2
Con el fin de satisfacer continuidad de los desplazamientos en los límites entre elementos se
debe introducir un nudo intermedio en cada lado del triángulo, que por simplicidad es ubicado en
los puntos medios como muestra la Figura 9-a. Tal como ocurrió en el caso del Triángulo de
Tensión Constante, se puede facilitar su desarrollo empleando coordenadas triangulares para
expresar las funciones de aproximación de desplazamientos. En este caso se tiene:
u1 (=
x1 , x2 ) u1i ζ i (2ζ i − 1) + u1j ζ j (2ζ j − 1) + u1k ζ k (2ζ k − 1) + 4u1l ζ iζ j + 4u1mζ jζ k + 4u1nζ k ζ i
u2 (=
x1 , x2 ) u2i ζ i (2ζ i − 1) + u2j ζ j (2ζ j − 1) + u2k ζ k (2ζ k − 1) + 4u2l ζ iζ j + 4u2mζ jζ k + 4u2nζ k ζ i
(36)
Por un procedimiento enteramente similar al seguido en el punto anterior se plantean las
ecuaciones de equilibrio y se obtiene la matriz de rigidez asociada a un Triángulo de Tensión
Lineal, identificado como TTL.
k
k
a)
b)
m
o
n
p
n
j
j
q
l
i
i
l
m
Figura 9: Triángulos de tensión lineal y cuadrática
Una nueva mejora en el elemento triángulo puede introducirse adoptando funciones de
aproximación cúbicas, lo que conduce a que las funciones de deformación y tensión sean cuadráticas.
Para satisfacer la continuidad de los desplazamientos en los bordes de los elementos aquí es necesario
definir dos puntos intermedios sobre cada lado del triángulo, tal como muestra la Figura 9-b.
Se observa que al aumentar el grado de la función de aproximación se hace necesario aumentar
el número de nudos necesarios para definir un elemento, y consecuentemente aumentan sus grados
de libertad, lo que queda reflejado en la Tabla 1 que se presenta a continuación. En ella se muestra
para las funciones de aproximación lineal, cuadrática y cúbica: i) el grado de la función de deformación
que corresponde a cada una, ii ) la cantidad de nodos necesarios para definir el elemento y iii ) la
cantidad de grados de libertad.
216
Compendio de Cálculo Estructural II – FCEFyN – UNC
J.Massa-J.Giro-A.Giudici - 2015
Tabla 1: Grado de las funciones, cantidad de nudos y de grados de libertad en elementos triángulo
Función de
aproximación
Grado de la función
de deformación
Cantidad
de Nodos
Grados
de libertad
Lineal
Constante
3
6
Cuadrática
Lineal
6
12
Cúbica
Cuadrática
9
18
El uso de elementos más sofisticados, en este caso con una mejor función de aproximación,
reduce la cantidad de elementos necesarios para definir un cierto modelo, pero como se desprende
de la tabla anterior no necesariamente reduce la cantidad total de grados de libertad involucrados o
por lo menos no lo hace en la misma proporción.
En efecto, el uso de elementos más sofisticados, y por lo tanto la reducción de la cantidad de
elementos, no tiene normalmente por finalidad disminuir los grados de libertad del modelo sino
más bien facilitar la definición de los datos, mejorar la calidad de la solución y facilitar la
interpretación de los resultados. Puede también darse el caso de que estos mejores elementos sean
indispensables para una adecuada representación del fenómeno físico estudiado.
7.1.2 Cuadriláteros
Los elementos cuadrilátero son de gran utilidad práctica. Su forma arbitraria les permite adaptarse
a dominios de forma irregular y presentan la ventaja sobre los triángulos de que el número de elementos
del modelo se reduce significativamente, lo que simplifica la tarea de preparación de los datos. Al
igual que lo ya visto para el caso de los triángulos, pueden generarse para el cuadrilátero innumerables
funciones de aproximación, desde algunas muy sencillas hasta otras muy sofisticadas.
La forma más simple de formar un cuadrilátero es adjuntando dos triángulos de tensión
constante ( Figura 10-a y 10-b) y para ello basta con superponer las correspondientes matrices de
rigidez. Otra forma de generar el cuadrilátero es componer cuatro triángulos (Figura 10-c) y
eliminar el nodo central común a todos ellos a través de condensación matricial. Esta eliminación
debe hacerse para expresar la rigidez de cada cuadrilátero sólo en función de los cuatro vértices,
antes de combinar la matriz global del sistema.
i
l
a
k
k
l
l
b
c
j
j
j
k
i
i
Figura 10: Cuadriláteros formados por dos y cuatro triángulos
7.2 Estados tridimensionales de tensión
La generalización para estados elásticos tridimensionales del método desarrollado en los
puntos anteriores para estados planos sigue los lineamientos ya presentados. El procedimiento para
la formulación de las matrices de rigidez es enteramente similar, por lo que se hará una breve
descripción de algunos de los tipos de elementos de uso corriente.
7.2.1 Tetraedro de tensión constante
Este elemento, mostrado en la Figura 11, constituye una inmediata generalización del
triángulo de tensión constante, adoptándose un tetraedro de forma arbitraria y desarrollándose sus
propiedades a partir de coordenadas adimensionales que relacionan volúmenes, de la misma forma
que en el estado plano de tensión se relacionaron áreas.
217
Compendio de Cálculo Estructural II – FCEFyN – UNC
J.Massa-J.Giro-A.Giudici - 2015
m
x3
ξk =
VK
V
x2
k
i
x1
j
Figura 11: Elemento tetraedro de tensión constante
7.2.2 Prisma rectangular
El elemento prisma rectangular, mostrado en la Figura 12, puede ser obtenido dando una tercera
dimensión a un cuadrilátero regular, proponiendo las correspondientes funciones de aproximación
y siguiendo un procedimiento similar al ya visto para el caso del triángulo con el fin de plantear las
ecuaciones de equilibrio y desarrollar la matriz de rigidez del elemento.
o
p
k
l
n
m
j
i
Figura 12: Elemento prisma rectangular
7.3 Elementos isoperimétricos
Se han visto hasta ahora diversos elementos de variada complejidad en las funciones de aproximación, pero todos ellos de formas geométricas simples y lados rectos. También pudo comprobarse
que al mejorar la función de aproximación del elemento era necesario introducir nodos adicionales
y por lo tanto nuevos grados de libertad.
Un método alternativo para mejorar elementos existentes, que no implica introducir mayor
cantidad de grados de libertad, consiste en la generalización de su forma geométrica. Esto es,
desarrollar elementos con lados curvos. Se llega así a un elemento que, además de disponer de la
capacidad de representar el comportamiento elástico de un sólido, se adapta con facilidad a un
contorno irregular sin hacer necesario un refinamiento excesivo de la malla.
La innovación introducida por los elementos “isoparamétricos” consiste en adoptar para la
forma de los bordes una función del mismo tipo que la empleada para la función de aproximación
de los desplazamientos, y de aquí proviene su denominación. En la Figura 13 se muestran
elementos isoparamétricos de diferente configuración, planos y espaciales.
Figura 13: Elementos isoperimétricos en dos y tres dimensiones
Cuando se usa para la geometría una función de grado inferior a la utilizada para los
desplazamientos el elemento es definido como “subparamétrico” y si ocurre lo contrario, es decir
que la función adoptada para representar la geometría es de mayor grado a la de los
desplazamientos, el elemento es definido “superparamétrico”.
218
Compendio de Cálculo Estructural II – FCEFyN – UNC
J.Massa-J.Giro-A.Giudici - 2015
La principal limitación que presentan los elementos de este tipo reside en la necesidad de una
transformación única entre las coordenadas cartesianas globales y las coordenadas adimensionales
propias del elemento, la que no siempre existe.
7.4 Elementos axilsimétricos
El problema de la distribución de tensiones en cuerpos de revolución (axilsimétricos) bajo
condiciones de cargas también axilsimétricas es de considerable interés práctico. Desde un punto
de vista matemático, el problema planteado es muy similar al de los estados planos de tensión o de
deformación, ya que el análisis requerido se reduce en una dimensión y es bidimensional.
Por simetría, dos componentes de desplazamiento en cualquier sección plana orientada radialmente definen completamente el estado de deformación y por lo tanto el estado de tensión. Una
sección que cumple esta condición se muestra en la Figura 14, siendo r y z las coordenadas radial y
axial que definen la posición de cualquier punto.
Para estos casos pueden emplearse las mismas funciones de desplazamientos adoptadas en los
desarrollos de los elementos triángulos. La diferencia esencial reside en que el desplazamiento radial
induce deformación en la dirección circunferencial, por lo que una cuarta componente de deformación
y tensión debe ser considerada. Definiendo vectores de tensión y deformación tales como:
εz
ε
r
=
ε =
; σ
εθ
γ rz
σ z
σ
r
σ θ
τ rz
(37)
es posible relacionarlos a través de las ecuaciones constitutivas ya estudiadas al tratar tubos de
pared gruesa utilizando coordenadas cilíndricas. Se tiene así:
z
{σ } = [C ] {ε }
ν
ν
1 −ν
ν
1 −ν
ν
[C ] = D ν
1 −ν
ν
0
0
0
D=
0
0
0
1 − 2ν
2
E
(1 + ν ) (1 − 2ν )
r
Figura 14: Sólido y elemento axilsimétrico
El resto de la formulación para el desarrollo del elemento sigue el mismo lineamiento general
visto con anterioridad, sólo que naturalmente es más compleja.
Tal como fue presentada, la solución a este problema requiere que las cargas tengan también
una distribución axilsimétrica. De no ser así, y en el caso en que las cargas presentan una distribución
armónica que es función del ángulo θ , el problema puede ser planteado en términos similares a los
ya expuestos. En caso contrario, es decir que no haya una representación armónica de las cargas,
deben previamente ser descompuestas a través del análisis de Fourier con el fin de ser expresadas
como una sumatoria de funciones cosenoidales.
Por ser las funciones cosenoidales ortogonales entre sí, las funciones de aproximación quedan
desacopladas para cada armónica y por lo tanto las matrices de rigidez que corresponden a cada una
de ellas pueden obtenerse por separado. De esta manera queda planteado un sistema de ecuaciones
algebraicas lineales para cada armónica, cuyos resultados deben ser combinados para la obtención de
los desplazamientos y tensiones finales que correspondan al estado de cargas aplicado.
219
Compendio de Cálculo Estructural II – FCEFyN – UNC
7.5
J.Massa-J.Giro-A.Giudici - 2015
Bandas finitas
Se considera aquí el caso de estructuras que presentan una sección transversal constante a lo
largo de un eje, tal como ocurre en el ejemplo ilustrado en la Figura 15.
Pueden mencionarse como principales aplicaciones para este tipo de elemento el modelado de
cubiertas o techos, puentes y recipientes. En este último caso se trata de objetos que han perdido su
condición de axilsimétricos como consecuencia de refuerzos o por formar parte de una configuración multicelular.
Todos estos casos pueden ser tratados con los
elementos finitos de uso general ya comentados con
anterioridad, pero la ventaja que ofrecen las bandas
finitas es un enorme ahorro en la preparación de los
datos del modelo, esfuerzo de procesamiento e
interpretación de los resultados. Scordelis empleó
en 1964 un planteo similar al de las Bandas Finitas
para el análisis de techos múltiples de configuración
semicilíndrica y Cheung desarrolló y difundió a
partir de 1968 una técnica de análisis que él mismo
denominó “Método de las Bandas Finitas” (Finite
Strip Method).
L
x
z
y
Figura 15: Bandas finitas
Volviendo a la Figura 15, un desplazamiento genérico “w” de cualquier punto de la cubierta
puede expresarse a través de un desarrollo de Fourier en la dirección del meridiano, es decir:
n
w ( x, y, z ) = ∑ wi ( x, y ) sen
i =1
iπ z
L
(38)
donde L representa la altura del meridiano en la dirección z. De esta forma un problema espacial es
reducido en una dimensión, debiendo analizarse para cada armónica un problema de dos dimensiones
en el plano (x, y). Posteriormente, los resultados se extienden a la tercera dimensión z superponiendo
la contribución de todas las armónicas. Aquí es necesario destacar que esta separación de variables
es posible debido a las propiedades de ortogonalidad que presentan las funciones armónicas, que ya
fueron mencionadas al presentarse los elementos axilsimétricos.
En resumen, para resolver un problema por el método de las Bandas Finitas se deben cumplir
los siguientes pasos:
a) Expresar la condición de cargas como una combinación de funciones senoidales a través de un
análisis armónico de Fourier.
b) Obtener las matrices de rigidez de los elementos correspondientes a cada una de las armónicas
determinadas en el análisis del punto anterior.
c) Armar las matrices de rigidez de la estructura y calcular los correspondientes desplazamientos y
solicitaciones para cada armónica por separado.
d) Combinar los resultados anteriores con el fin de obtener los desplazamientos y solicitaciones
finales en cualquier punto a lo largo del meridiano z.
Volviendo al punto “b”, se presentan dos variantes para el desarrollo de las matrices de
rigidez de los elementos. Si las bandas empleadas son planas se sigue un procedimiento análogo al
mostrado en detalle para el triángulo de tensión constante y éste es el método clásico de “bandas
finitas planas”. Por el contrario, si se adoptan bandas de sección curva se recomienda integrar numéricamente a lo largo del elemento para determinar sus propiedades y armar así sus matrices de rigidez
para cada armónica. Estos últimos elementos son denominados “elementos finitos semianalíticos.
Llegado a este punto es necesario reconocer la principal limitación que presenta el método de
las bandas finitas. Por ser los desplazamientos y esfuerzos expresados a través de funciones
senoidales provenientes del análisis de Fourier, la solución propuesta queda limitado a estructuras
que presenten una condición de apoyo simple en sus bordes extremos, que corresponden a z = 0 y
z = L. En efecto, una condición de apoyo con desplazamientos y rotaciones nulas, correspondientes
a un empotramiento, no es representable mediante la función senoidal empleada.
220
Compendio de Cálculo Estructural II – FCEFyN – UNC
J.Massa-J.Giro-A.Giudici - 2015
7.6 Otros elementos
Las ventajas que ofrece el Método de los Elementos Finitos para la resolución de problemas
estructurales motivó que un gran esfuerzo se haya orientado a desarrollar nuevos elementos más
sofisticados para reemplazar otros ya existentes o para modelar casos muy particulares. Es así que
en la actualidad se dispone de Elementos Finitos que representan materiales compuestos (plásticos
reforzados con fibra de vidrio o carbono, panel de abejas, etc.), materiales fisurados, materiales con
diverso grado de anisotropía, etc. Estas propiedades especiales y sus diversas formas hacen posible la
correcta representación de sólidos elásticos de la más variada geometría, propiedades y condiciones
de trabajo. A estos nuevos elementos deben agregarse los otros más simples y ya conocidos del curso
anterior, como son los elementos prismáticos en todas sus variantes: barra, viga, resorte axial y tubo
recto con presión interior. Además, deben también sumarse el tubo curvo (codo) y el elemento elástico
(resorte) en flexión y torsión.
Todos estos elementos están normalmente disponibles en las “librerías” de los grandes
sistemas de cálculo que emplean este método, mostrándose como ejemplo en la Tabla 2 una de
estas librerías que podría ser considerada típica.
Tabla 2: Librería de Elementos Finitos de un sistema comercial (NISA)
Nótese que las filas de la tabla de esta librería corresponden a los diferentes tipos de elementos
disponibles, que son definidos en la primera columna. La segunda columna describe los grados de
libertad por cada nodo, donde el prefijo “U” corresponde a desplazamientos y el “R” a rotaciones.
Luego, las siguientes columnas corresponden a diferentes funciones de aproximación de los
desplazamientos, tales como lineal, cuadrática, cúbica o una combinación de estas. Es decir que se
trata de una tabla de doble entrada que permite seleccionar cierto tipo de elemento y su función de
aproximación.
Por ejemplo, en la sexta fila se encuentran los elementos de placa de tipo general (general
shell ), que tienen seis grados de libertad por nodo (tres desplazamientos y tres rotaciones, es decir
221
Compendio de Cálculo Estructural II – FCEFyN – UNC
J.Massa-J.Giro-A.Giudici - 2015
que los nodos transmiten momentos) y en la quinta columna se encuentra el elemento de placa
general definido con una función de aproximación de desplazamientos cúbica. Nótese que los
elementos de placa de esta sexta fila se definen a partir de nodos distribuidos sobre el plano medio
y que el elemento de la quinta columna queda definido por 12 nodos, es decir se trata de un
elemento de 72 grados de libertad.
La séptima fila también corresponde a placas, pero en este caso se trata de elementos con
espesor que quedan definidos a partir de nodos en ambos planos, superior e inferior, que solo tienen
tres grados de libertad de desplazamientos y no incluyen rotaciones. En este caso el elemento con
función de aproximación cúbica queda definido por 24 nodos (12 nodos en cada plano) con 72
grados de libertad (igual que en el caso anterior). Este elemento es apropiado para placas de
espesor considerable y el anterior es para placas delgadas.
En la parte inferior derecha de la tabla se presentan elementos especiales, tales como los
destinados a representar placas sándwich o laminados con materiales compuestos. Como se observa,
hay una amplia disponibilidad de elementos que requieren de criterio y experiencia para su correcto
uso y el mejor aprovechamiento posible. En caso de duda siempre es recomendable desarrollar
varios modelos progresivamente más complejos y comprobar la consistencia de sus resultados.
La librería de elementos mostrada en la Tabla 2 pertenece al Sistema de Cálculo NISA
(Numerically Integrated elements of System Analysis), pero hay que aclarar que, si bien los diversos
sistemas tienen particularidades que los caracterizan, todos disponen de librerías similares a la
mostrada en la Tabla 2.
8 COMBINACIÓN DE ELEMENTOS FINITOS
8.1 Mallas de elementos
Tal como fue comentado al presentar la Figura 3, el objetivo del Método de los Elementos
Finitos es desarrollar modelos discretos de sólidos elásticos que permitan el cálculo de las tensiones
y deformaciones que experimentan ante ciertas condiciones de trabajo. El primer paso fue
desarrollar estos elementos, que quedan representados por sus matrices de rigidez, y una vez que
estos elementos están disponibles, el paso siguiente es combinar dichos elementos de forma tal que
reproduzcan correctamente el comportamiento de los objetos estudiados. Los interrogantes que
aquí se presentan son varios y muchos de ellos solo encuentran respuesta en la experiencia. ¿Qué
elementos usar? ¿Cómo disponer los elementos para conformar una malla? ¿Qué densidad de
elementos es conveniente? son algunos de estos interrogantes.
Como ejemplo se presenta el caso de una viga simplemente apoyada, sometida a una condición
de carga distribuida aplicada estáticamente y cuya sección transversal presenta gran altura respecto de
su distancia entre apoyos (luz). La viga en cuestión es representada en la Figura 16-a y el ejemplo fue
presentado por K. Rockey en su libro (Rockey et al, 1975). Nótese que se eligió este caso porque,
pese a su sencillez, la solución exacta no se obtiene en forma inmediata como consecuencia de la
elevada altura de la sección. Para resolver este problema mediante el método de los Elementos Finitos
se proponen diferentes modelos y se comparan las soluciones obtenidas con cada uno.
Para representar los modelos de la viga se adoptaron triángulos de tensión constante y dos
diferentes formas de disponer estos triángulos, que se muestran en las Figuras 16-b y 16-c. Después
de estudiar algunos casos se comprueba que la malla 16-b conduce a mejores resultados que la malla
16-c y presenta además la ventaja de que su regularidad facilita la generación automática de los datos.
Una vez encontrada la forma más conveniente de disponer los triángulos, el paso siguiente es
determinar la densidad de malla requerida para alcanzar la solución del problema. Las Figuras 16-d, 16-e
y 16-f muestran los tres modelos empleados en el análisis y con los cuales se obtuvieron resultados.
En todos ellos se impusieron las condiciones de apoyo haciendo nulos los desplazamientos verticales
de los nodos del borde inferior de ambos extremos y las características de estos tres modelos se
resumen en la Tabla 3 presentada a continuación.
222
Compendio de Cálculo Estructural II – FCEFyN – UNC
J.Massa-J.Giro-A.Giudici - 2015
Tabla 3: Características de los modelos de la viga de la Figura 16-a
Modelo
Elementos
Nudos
Figura 16-d
96
65
Grados de
Libertad
120
Figura 16-e
150
96
180
Figura 16-f
600
341
660
En la Figura 16-g se representa la deflexión de la viga obtenida con los diferentes modelos y
se las compara con las deflexiones que corresponden a la solución exacta y a la obtenida a partir de
la teoría de vigas. Para este último caso no se consideró la deformación por corte.
5 in
Carga uniforme 0,8 ton/in
E = 13400 ton/in2
ν = 0,3
15 in
Figura
Figura 16-d: Modelo de 120 grados de libertad
Figura 16-b: Modelo de malla regular
Figura 16-e: Modelo de 180 grados de libertad
Figura 16-c: Modelo de malla simétrica
Figura 16-f: Modelo de 660 grados de libertad
0
Deflexión [inch x 10-3]
1 in
16-a: Viga de elevado espesor
Distancia a lo largo de la viga [inch]
5
10
15
1
2
Tensión Longitudinal
σx [ton/in2]
3
Tensión
Transversal
σy [ton/in2]
4
5
65 Nodos, 96 elementos
96 Nodos, 150 elementos
341 Nodos, 600 elementos
Teoría de vigas
Teoría de la elasticidad
65 Nodos, 96 elementos
96 Nodos, 150 elementos
341 Nodos, 600 elementos
Teoría de vigas
Teoría de la elasticidad
Figura 16-g: Deformación de la viga
Figura 16-h: Tensiones longitudinales y transversales
En todos los casos estudiados los resultados obtenidos con elementos finitos están por debajo
de los verdaderos. Como puede apreciarse, al afinarse la malla los resultados se aproximan a los de
la solución exacta, lo que demuestra la “convergencia” del modelo. Finalmente, en las Figuras 16-h
y 16-i se muestran gráficos con las tensiones longitudinales y transversales en toda la altura de la
sección. Para representar estos resultados y por haberse utilizado triángulos de tensión constante, se
asumió que los valores corresponden a los centroides de los elementos.
A partir del análisis realizado se obtiene una primera conclusión: se recomienda usar varios
modelos hasta hallar uno que demuestre convergencia en los resultados cuando el número de elementos
223
Compendio de Cálculo Estructural II – FCEFyN – UNC
J.Massa-J.Giro-A.Giudici - 2015
crece. De esta forma puede asegurarse que el modelo es correcto y puede concentrarse la atención
en seleccionar el tamaño de malla más apropiado. Deben evitarse las mallas más densas de lo
necesario ya que, no solo consumen esfuerzo de cálculo, sino que también aumentan el trabajo de
preparación de los datos y dificultan la interpretación de los resultados.
Otro interrogante que enfrenta quien emplea el método de los Elementos Finitos es el siguiente:
¿conviene usar elementos simples en una malla densa o elementos sofisticados con una malla poco
poblada? Aparentemente este interrogante tendría rápida respuesta si se considera el problema
desde el punto de vista de facilitar la entrada de datos, ya que indudablemente resulta ventajosa una
malla poco poblada. Sin embargo, esto no es definitivo ya que la definición de los elementos
sofisticados requiere de mayor cantidad de nodos. Además, si se considera la calidad de los
resultados tampoco pueden darse recomendaciones definitivas y nuevamente la experiencia es la
que tiene la última palabra.
8.2 Algunas recomendaciones para la definición de mallas
Si bien una buena modelización con elementos finitos es en gran medida el resultado de la
propia experiencia del analista, se proponen algunas pautas que pueden ser útiles para alcanzar los
siguientes cinco objetivos principales:
• Facilitar la definición del modelo y sus datos.
• Representar adecuadamente las características elásticas del objeto estudiado.
• Evitar problemas numéricos.
• Reducir el esfuerzo de cálculo (tiempo de proceso).
• Facilitar la interpretación de los resultados.
Las recomendaciones enumeradas a continuación son en realidad sólo recomendaciones que
serán más oportunas en algún caso que en otro, y si bien son aplicables para cualquier tipo de
elemento, serán especialmente útiles cuando se trabaje con los elementos más simples, que son las
que corresponden a las mallas más densas. Estas son las siguientes:
a) Referidas al propio elemento
1) Los elementos deben ser tan regulares como sea posible, los elementos distorsionados o con
ángulos obtusos deben evitarse. En el caso de triángulos lo ideal son los equiláteros. La buena
relación de aspecto de los elementos mejora la convergencia y exactitud.
b) Referidas a las mallas de elementos
2) La malla debe respetar los contornos del objeto tan fielmente como sea posible y debe densificarse,
reduciendo el tamaño de los elementos, en las zonas en que el contorno presenta radios pequeños
o discontinuidades.
3) Desde el punto de vista de los resultados, las mallas deben densificarse en las zonas donde se
espera el mayor gradiente de tensiones.
4) Las mallas deben densificarse gradualmente, y no en forma brusca, evitándose que elementos
finitos de tamaños muy diferentes compartan un mismo nudo.
5) Las mallas deberían ser regulares en el sentido de que cada nodo sea compartido por una
cantidad similar de elementos.
6) En un proceso de refinamiento es recomendable que las mallas mas densas estén incluidas en
las anteriores, lo que significa que todos los nodos de las mallas más gruesas forman parte de
las derivadas de ellas (más finas).
c) Referidas a la cantidad de elementos
7) Las mallas densas son costosas y deben evitarse. Por este motivo, se sugiere introducir mejoras
en los modelos a través de densificaciones localizadas en zonas especiales tomando como base
una malla general aceptable.
224
Compendio de Cálculo Estructural II – FCEFyN – UNC
J.Massa-J.Giro-A.Giudici - 2015
d) Referidas a la numeración de nodos y elementos
8) Se debe ser sistemático en la asignación de la identificación numérica a nodos y elementos.
Esto facilita la definición del modelo y la interpretación de los resultados.
9) Siempre que sea posible, debe procurarse que los nodos de un mismo elemento estén identificados
con números próximos entre sí, ya que de esta manera se reduce el ancho de banda de la matriz
de rigidez de la estructura.
e) Referidas a la convergencia de los resultados
10) Una buena malla debe mostrar que su sucesiva refinación conducen a resultados que muestran
un comportamiento asintótico a lo que se supone que es la solución exacta. Por el contrario, la
falta de una tendencia clara en los resultados debe tomarse como una señal de advertencia que
está poniendo en evidencia problemas en el desempeño del modelo.
A título de ejemplo se muestran en las Figuras 17 y 18 mallas de elementos finitos y se
comentan los criterios utilizados en la definición de cada una.
Figura 17: Placa con orificio rectangular (sólo un 1/4 del dominio por doble simetría)
Figura 18: Accesorio de montaje (planchuela plana con orificios)
Puede observarse que ambos modelos respetan las recomendaciones 1 (elementos de forma
regular), 2 (los modelos respetan los contornos geométricos), 3 (las mallas se densifican en las zonas
225
Compendio de Cálculo Estructural II – FCEFyN – UNC
J.Massa-J.Giro-A.Giudici - 2015
de concentración de tensiones, donde se espera mayores gradientes), 4 (la densificación de las
mallas es gradual ), 5 (en general los nodos comparten la misma cantidad de elementos) y 7 (las
zonas más densas están localizadas). Para evaluar los criterios 6, 8, 9 y 10 se requiere de mayor
información que la suministrada.
8.3 Ensamble de la matriz de rigidez de la estructura
Una vez definida la malla que materializa el modelo discreto, el paso siguiente es el armado de
la matriz de rigidez global de la estructura. Esta es una etapa que realiza en forma automática el sistema
de cálculo, y por lo tanto es totalmente externa al usuario. Sin embargo, es muy importante que este
último este informado sobre las características de esta tarea, aun cuando no vaya nunca a desarrollar
su propio sistema. Algunas de las recomendaciones referidas a la definición de mallas presentadas
en el punto anterior tienen impacto directo en la matriz de rigidez a la que se hace aquí referencia.
Por ejemplo, la matriz de rigidez tendrá sus valores numéricos concentrados en torno a la
diagonal principal si los nodos son numerados de conformidad con la recomendación No. 9. Esto es
muy importante debido a que el orden de estas matrices puede llegar a ser enorme (cientos de
miles) y a efectos de reducir el espacio de almacenamiento y el tiempo de proceso sólo se
almacenan y operan los valores de la semibanda (perfil de valores no nulos a partir de la diagonal).
De no cumplirse con este criterio los elementos estarán dispersos en toda la matriz y en el peor de
los casos habrá que almacenar y operar la matriz completa, limitando la capacidad del sistema y
aumentando el tiempo de cálculo. Por ello es habitual que los software de elementos finitos
renumeren internamente los nudos para obtener ventajas computacionales.
Las recomendaciones 1, 4 y 5 también impactan en la matriz de rigidez. Elementos distorsionados o la combinación de elementos de dimensiones extremadamente diferentes, por citar algunos
casos típicos, pueden llevar a un mal condicionamiento de la matriz (ill conditioned ) que contribuirá
a una mayor propagación de errores en el proceso de resolución del sistema de ecuaciones. En casos
extremos se pueden llegar a tener resultados inútiles por la importante presencia de errores.
La eventualidad de un problema de mal condicionamiento en la matriz de rigidez se pone de
manifiesto en la falta de equilibrio global de la estructura (cargas y reacciones de apoyos) y/o en la
falta de equilibrio en los nodos, por lo que es recomendable hacer ambos controles antes de
comenzar a interpretar los resultados.
Volviendo al propio armado de la matriz de rigidez, se trata de una actividad sistemática donde
cada una de las particiones de las matrices de cada elemento de la malla debe ser transformada a un
sistema de coordenadas global de referencia y posteriormente incorporada a la matriz global de la
estructura. Esta tarea es totalmente similar al armado de la matriz de rigidez de estructuras de barras
prismáticas, solo que debe considerar la mayor cantidad de nodos en la definición de cada elemento.
La necesidad de la transformación de coordenadas se origina en que las matrices de los
elementos son definidas con referencia a sistemas locales y deben ser objeto de un cambio de base
para referirlos a un sistema de referencia único. Tal como en el caso de las estructuras de barras, se
trata de una transformación ortogonal.
Luego, en el proceso de armado de la matriz de rigidez global de la estructura debe tenerse en
cuenta que cada elemento finito es definido por una cierta cantidad de nodos “m”, que son localmente
identificados en un cierto orden (normalmente antihorario). A su vez, cada nodo tiene cierta cantidad
de grados de libertad “g” (entre dos y seis), por lo que la matriz de rigidez de cada elemento es de
orden n = m x g y en ella se reconocen m2 particiones de orden g. Por su parte, la estructura queda
definida por “M” nodos, que corresponde a un total de N = M x g grados de libertad y una matriz de
rigidez global que tendrá M 2 particiones de orden g. El armado de la matriz global implica establecer
un vínculo entre cada partición de esta y cada partición de las matrices de los elementos, incorporándolas progresivamente.
Ejemplo 4
Mostrar en detalle el armado de la matriz de rigidez global que corresponde al ensamble de
tres triángulos de tensión constante presentado en la Figura 19.
226
Compendio de Cálculo Estructural II – FCEFyN – UNC
J.Massa-J.Giro-A.Giudici - 2015
3
1
x2
B
x1
C
A
4
2
5
Figura 19: Ensamble de tres elementos triángulo
Por razones de claridad y espacio disponible, se presentan por separado las contribuciones de
las matrices de rigidez de los elementos “A”, “B” y “C” a la matriz de rigidez global de la
estructura. La contribución del triángulo “A” a la es la siguiente:
K1111
21
K11
11
K 21
21
K 21
0
KA =
0
K 11
41
K 4121
0
0
K1112
K1122
12
K 21
K 2122
0
0
12
K 41
K 4221
0
0
K1211
K1221
11
K 22
K 2221
0
0
11
K 42
K 4221
0
0
K1212
K1222
12
K 22
K 2222
0
0
12
K 42
K 4222
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
K1411
K1421
11
K 24
K 2421
0
0
11
K 44
K 4421
0
0
K1412
K1422
12
K 24
K 2422
0
0
12
K 44
K 4422
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
(39)
De igual forma, la contribución del elemento “B” a la matriz de rigidez global es:
K1111
21
K11
0
0
K 11
K B = 31
21
K 31
K 11
41
K 4121
0
0
K1112
K1122
0
0
12
K 31
K 3122
12
K 41
K 4221
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
K1311
K1321
0
0
11
K 33
K 3321
11
K 43
K 4321
0
0
K1312
K1322
0
0
12
K 33
K 3322
12
K 43
K 4322
0
0
K1411
K1421
0
0
11
K 34
K 3421
11
K 44
K 4421
0
0
K1412
K1422
0
0
12
K 34
K 3422
12
K 44
K 4422
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
(40)
Por último, la contribución del elemento “C” a la matriz de rigidez es:
0
0
0
0
0
KC =
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
11
K 33
K 3321
11
K 43
K 4321
11
K 53
K 5321
0
0
0
0
12
K 33
K 3322
12
K 43
K 4322
12
K 53
K 5322
227
0
0
0
0
11
K 34
K 3421
11
K 44
K 4421
11
K 54
K 5421
0
0
0
0
12
K 34
K 3422
12
K 44
K 4422
K 5124
K 5422
0
0
0
0
11
K 35
K 3521
11
K 45
K 4521
11
K 55
K 5521
0
0
0
0
12
K 35
K 3522
12
K 45
K 4522
12
K 55
K 5522
(41)
Compendio de Cálculo Estructural II – FCEFyN – UNC
J.Massa-J.Giro-A.Giudici - 2015
La matriz de rigidez de los tres elementos considerados es la suma de las matrices anteriores.
Representando con un solo símbolo las cuatro particiones que corresponden a cada nodo se tiene:
K11A + K11B
A
K 21
K = K A + K B + K C = K 31B
A
B
K 41 + K 41
0
K12A
K 22A
0
K 42A
0
K13B
0
B
K 33 + K 33C
C
K 43B + K 43
K 53C
K14A + K14B
K 24A
K 34B + K 34C
C
K 44A + K 44B + K 44
K 54C
0
0
K 35C
C
K 45
K 55C
(42)
Observando la matriz de rigidez se pueden sacar las siguientes conclusiones:
a. Las particiones que corresponden a los nodos 1-5, 2-3 y 2-5 son nulas, en correspondencia
con la falta de un elemento que vincule estos nodos en forma directa. Es decir, ningún
elemento aporta rigidez relativa entre ellos. Debido a la simetría de la matriz de rigidez y a la
misma razón ya expuesta, también son nulas las particiones de los nodos 5-1, 3-2 y 5-2.
b. Sobre la diagonal principal y en correspondencia con los nodos 1 y 3 se verifica la
contribución de la rigidez de dos elementos. En efecto, a la rigidez de los nodos 1 y 3
contribuyen los elementos “A-B” y “B-C” respectivamente, por tener esos nudos en común.
c. A la partición del nodo 4 sobre la diagonal principal contribuyen los tres elementos “A”, “B”
y “C” ya que este nodo es común a todos ellos.
d. Los nodos 2 y 5 pertenecen cada uno a un único elemento, por lo que las correspondientes
particiones sobre la diagonal principal tienen una sola contribución.
Supóngase ahora que se desea aumentar la rigidez relativa entre los nodos 1 y 5 y para ello se
recurre a un tensor “D” como se muestra con línea de trazos en la Figura 20. Esto significa que se
desea combinar una malla de elementos triángulo con un elemento prismático que es definido por
dos nodos, en este caso los identificados como “1” y “5”.
1
3
x2
B
x1
D
tensor
A
C
2
4
5
Figura 20: Ensamble de tres elementos triángulo con un tensor de refuerzo
Lo que debe hacerse es incorporar a la matriz de rigidez de la estructura las cuatro particiones
de la matriz de rigidez del elemento “D”, que contribuyen a la rigidez de las particiones de los
nodos 1 y 5. Es así que las particiones 1-5 y 5-1 dejan de ser nulas y se incorpora rigidez a las
particiones correspondientes sobre la diagonal.
K11A + K11B + K11D
K 21A
K = K A + KB + KC + KD =
K 31B
KA + KB
41
41
D
K 51
K12A
K13B
K14A + K14B
K 22A
0
K 24A
0
K 33B + K 33C
K 34B + K 34C
K
A
42
0
K +K
B
43
K 53C
C
43
K +K +K
A
44
B
44
K 54C
0
C
K 35
C
K 45
K 55C + K 55D
K15D
C
44
(42)
El ejemplo propuesto sirve para mostrar la facilidad con que pueden combinarse diferentes
tipos de elementos finitos en un modelo discreto, a condición de asegurar compatibilidad en los
grados de libertad de los nodos involucrados. También para poner en evidencia que el armado de la
matriz de rigidez implica un proceso algorítmico completamente sistemático, que resulta particularmente apropiado para ser implementado a través de computadoras.
228