10.1 Justificación
Anuncio

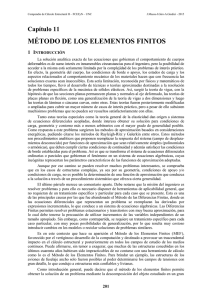
10. Teorema de la energía potencial estacionaria El método de los elementos finitos se fundamenta matemáticamente en la minimización de un funcional asociado con las ecuaciones diferenciales que gobiernan el problema. En elasticidad lineal ese funcional es la energía potencial del cuerpo, la cual, al ser minimizada, genera ecuaciones que son iguales o equivalentes a las ecuaciones de equilibrio. A continuación se presenta una justificación del teorema de la energía potencial estacionaria y se ilustra luego su aplicación con un ejemplo sencillo de un sistema de resortes. 10.1 Justificación Considere un cuerpo elástico (Figura 10.1) sometido a la acción de fuerzas de volumen fi (en lo que sigue se usa la notación del índice repetido) f1 f f 2 ( F / L3 ) f 3 R Ui ti n R* fi x2 Bu x1 x3 Bt Figura 10.1. Cuerpo elástico sometido a fuerzas de superficie y de volumen 93 y fuerzas de superficie ti que actuan en una parte del contorno Bt t1 t t 2 ( F / L2 ) t 3 En la otra parte del contorno Bu los desplazamientos están especificados. Se desea conocer los desplazamientos ui (en la dirección xi) que se producen en el cuerpo después de que se aplican las cargas. Las regiones R y R* de la Figura 10.1 coinciden con el cuerpo antes y después de la deformación, respectivamente. Supóngase ahora que dado el cuerpo deformado R*, se produce un campo adicional de desplazamientos virtuales ui, tales que no se modifiquen las fuerzas internas ni externas actuando sobre el cuerpo. Estos desplazamientos virtuales deben satisfacer las condiciones de borde, o sea que deben ser iguales a cero en Bu. El trabajo producido a lo largo de este campo de desplazamientos virtuales, o trabajo virtual, es W t i u i dB f i u i dV Bt (10.1) R Dadas las relaciones entre las tracciones en la superficie ti y los componentes del tensor esfuerzo ki ti = kink (10.2) se puede escribir W en términos de los ki. En la ecuación (10.2) los ni son los componentes del vector unitario normal a la superficie. Reemplazando (10.2) en (10.1) se obtiene W ki nk u i dB f i u i dV Bt R A continuación, y mediante el teorema de divergencia se puede transformar la integral de superficie en una de volumen, con lo que se obtiene ki W R xk ui ki u i dV f i u i dV xk R Si se aplican las relaciones entre las deformaciones y los desplazamientos 1 u u ik i k 2 x k x i 94 Se puede reescribir W así ki f i u i dV ki ki dV xk R R W ya que como el tensor esfuerzo es simétrico se cumple que ui ki ki ki . xk Los términos contenidos en la primera integral son cero si el cuerpo está en equilibrio ki fi 0 xk La segunda integral es la energía de deformación del cuerpo a lo largo de los desplazamientos virtuales ui, que como se mostró es igual al trabajo virtual si el cuerpo está en equilibrio, con lo cual queda justificado el principio del trabajo virtual que dice: Dado un cuerpo elástico en equilibrio, el trabajo de las fuerzas externas a lo largo de un campo de desplazamientos virtuales es igual al incremento de la energía de deformación debido a los desplazamientos virtuales. En ecuacion W = U (U - W) = 0 Donde U es la energía de deformación. Se define ahora p = U - W, donde p es la energía potencial del cuerpo, calculada como la energía de deformación U, menos el trabajo de las cargas externas a lo largo de los desplazamientos, W. Nótese que W no es el trabajo real de las cargas externas, sino que se calcula como el producto de las fuerzas externas por los desplazamientos, como si el valor total de las fuerzas ya estuviera aplicada en el momento de producirse los desplazamientos. Obsérvese que la minimización de la energía potencial equivale a establecer la ecuación del trabajo virtual, la cual a su vez es válida si el sistema está en equilibrio, queda justificado entonces el teorema de la Energía Potencial Estacionaria que dice así: 95 Entre todos los campos de desplazamiento que satisfacen las ecuaciones de compatibilidad y las condiciones de borde, aquel que también satisface las ecuaciones de equilibrio hace que la energía potencial p tenga un valor estacionario. Se puede demostrar también, que si el equilibrio es estable, la energía potencial tiene un valor mínimo. (U - W) = p = 0, para equilibrio. 10.2 Ejemplo Se ilustra ahora la aplicación del teorema con el ejemplo de la Figura 10.2. k1, k2, k3 y k4 son las constantes de cada uno de los resortes. El desplazamiento de 4 es nulo y se desean conocer los desplazamientos de los nodos 1, 2 y 3; u1, u2 y u3. k2 (2) P 1 u1 k1 3 2 k4 (4) (1) k3 u2 (3) u3 Figura 10.2. Sistema de resortes El cálculo de la energía potencial es como sigue, p = U - W donde W = P u1 , y 1 1 1 1 2 2 2 2 U k1 u1 u 2 k 2 u 2 u 3 k 3 u 2 u 3 k 4 u 3 2 2 2 2 Los valores de equilibrio de u1, u2 y u3 deben ser tales que minimicen a p, por tanto 96 p 0 k1 (u1 u 2 ) P u1 p 0 k1 (u1 u 2 ) k 2 (u 2 u3 ) k 3 (u 2 u3 ) u 2 p 0 k 2 (u 2 u3 ) k 3 (u 2 u3 ) k 4 (u3 ) u3 El sistema anterior de tres ecuaciones se puede reorganizar matricialmente para obtener k1 u1 P k1 0 (k 2 k 3 ) u 2 0 k1 ( k1 k 2 k 3 ) 0 (k 2 k 3 ) (k 2 k 3 k 4 ) u 3 0 el cual se puede escribir en forma simbólica como Ku =F. Donde K es la matriz de rigidez del sistema, simétrica y de banda y u es el vector de desplazamientos globales o de todo el sistema. Para ilustrar la equivalencia entre el teorema de la energía potencial y el equilibrio, se resuelve a continuación el mismo problema mediante la aplicación de las ecuaciones de equilibrio en cada nodo. Nodo 1, P k1(u1 - u2) Nodo 2, k1 (u1 - u2) k2 (u2 - u3) Fx = P - k1 (u1 - u2) = 0 k3(u2 - u3) Fx = k1 (u1 - u2) - k2 (u2 - u3) - k3 (u2 - u3). 97 Nodo 3, k2 (u2 - u3) k4u3 k3 (u2 - u3) Fx = k2 (u2 - u3) + k3(u2 - u3) - k4u3 = 0 Que son las mismas ecuaciones obtenidas anteriormente mediante el teorema de la energía potencial estacionaria. Si se piensa en la solución del mismo problema en el computador, el algoritmo consiste en construir la matriz de rigidez global K a partir de las contribuciones de la matriz de rigidez de cada resorte K (e), definida como 1 K(e) k e 1 1 1 la cual relaciona las fuerzas y desplazamientos en los nodos correspondientes a cada elemento, es decir 1 1 u1( e ) F1( e ) ke ( e) ( e) , 1 1 u2 F2 donde el superescrito (e) indentifica el elemento y permite diferenciar las numeraciones locales con las globales de todo el sistema. F1(e 1,i ke 2,j F2(e ) ) u1(e) u2(e) Figura 10.3. Elemento resorte Por ejemplo, los nodos 1 y 2 mostrados corresponden a una numeración local, serán llamados i y j en la numeración global. Para el ejemplo en consideración, el nodo 2 del elemento (3), es el nodo 3 global. Cada entrada, Kij(e) de esta matriz, es igual a la 98 fuerza que es necesario aplicar en i si hay un desplazamiento unitario en j, siendo los otros desplazamientos iguales a cero. Conocidas las matrices de rigidez de los elementos es posible ensamblar la matriz global K de la manera sistemática que se ilustra en la Figura 10.4. Esta es una de las ventajas del método de los elementos finitos que permite su fácil implementación en programas de computador. 1 2 1 k1 2 k1 2 2 k2 3 k 2 2 2 k3 3 k 3 3 3 k4 0 k 4 k1 k1 3 k2 k 2 3 k3 k 3 1 k1 k 1 2 k1 k1 k 2 k 3 k 2 k3 3 1 k 2 k 3 2 k 2 k 3 k 4 3 0 k4 k 4 Figura 10.4. Adición de las matrices locales en la matriz global 10.3 Ejercicios propuestos 1. Calcule la energía potencial del elemento resorte de la Figura 10.3 y con base en ella obtenga la matriz de rigidez del elemento. 2. Calcule los desplazamientos y fuerzas en el sistema de resortes mostrados en la Figura 10.5. 99 4 N/mm 1 3 N/mm 2 N/mm 3N 4N 5 N/mm Figura 10.5. Esquema para el problema 2 3. Escriba un algoritmo para adicionar una matriz de rigidez de un elemento en una matriz global. Se supone que la matriz de rigidez del elemento tiene dimensiones nexne y que la conectividad está dada en el arreglo nn(ne) 100