TEMA10-Métodos
Anuncio

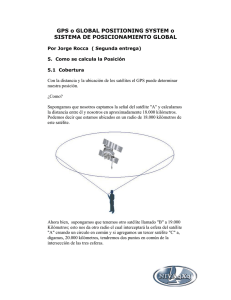
Curso avanzado de posicionamiento por satélite Madrid, noviembre 2009 TEMA 10. Métodos de observación 1. Introducción. El objetivo de este tema es exponer las técnicas de observación más empleadas y sus respectivas precisiones, nivel de complejidad y costes, de tal forma que en función del trabajo a desarrollar se aplicarán unas u otras técnicas. La elección del método dependerá fundamentalmente de dos factores: equipo disponible y precisión final/rendimiento que se quiere alcanzar. Se puede hacer una amplia clasificación en función de muchas variables. Una clasificación tradicional sería: ¾ ¾ ¾ En función del observable utilizado: • Código (metros) • Código y Fase (centímetros, milímetros) En función del movimiento del receptor • Estático, no se mueve durante la observación (mayor precisión y tiempo) • Cinemático, el receptor se desplaza durante la observación • Hibridos, combina los dos anteriores En función del tipo de solución • Posicionamiento absoluto: coordenadas de un punto aislado (X, Y, Z). • Posicionamiento relativo o diferencial GPS (DGPS): coordenadas de un punto con respecto a otro (dX, dY, dZ). ¾ En función de la disponibilidad de la solución • Tiempo Real, cálculo y solución en campo (por ejemplo RTK) Tema 10 - 377 Curso avanzado de posicionamiento por satélite • Madrid, noviembre 2009 Post-proceso, cálculo y solución en gabinete. En un amplio sentido de la palabra, estas técnicas se pueden clasificar básicamente en tres clases, mezclando los conceptos vistos anteriormente: 1.- Navegación autónoma = Posicionamiento Absoluto por código, empleando sólo un receptor simple. Empleado en navegación, con una precisión estándar de 5 metros (se supone que ya siempre la SA está desactivada). 2.- GPS Diferencial por Código = DGPS, exige corrección a las pseudodistancias (o, aunque más raro, a las coordenadas). Se puede conseguir una precisión estándar de entre 1 m. Utilización: Navegación costera, adquisición de datos para SIG, inventarios georreferenciados, revisión de cartografía de escalas medias (1:10.000, 1:25.000, 1:50.000), agricultura automatizada, movimientos no precisos de maquinaria de obra civil, control de flotas, etc. 3.- Posicionamiento Diferencial de Fase, Precisión entre 0,1 m y 5 mm, dependiendo de la técnica, observables, tiempo de observación, etc. Aplicaciones: Geodesia, Topografía, Geodinámica, control de deformaciones, control preciso de maquinaria automática, etc. En general, en este grupo es el que nos moveremos los profesionales de la Geodesia y la Topografía. 2. Posicionamiento absoluto con código. Es la técnica más sencilla empleada por los receptores GPS para proporcionar instantáneamente al usuario la posición y/o tiempo. Se realiza con un único receptor, y consiste, como ya se ha visto, en la solución de una intersección inversa de todas las seudodistancias receptor-satélite sobre el lugar de estación en un período de observación dado. Las precisiones esperadas en este tipo de posicionamiento son de unos 5 metros (sin SA). Los receptores utilizados son unidades pequeñas, portátiles y de bajo coste, con recepción de código, resultando útil para usuarios de barcos, aviones, vehículos, deporte, ocio y todas aquellas aplicaciones donde la exigencia de precisión en el posicionamiento esté por encima de los 10 metros. Las soluciones se obtienen en tiempo real, bien con solución instantánea de navegación o por resolución de un Tema 10 - 378 Curso avanzado de posicionamiento por satélite Madrid, noviembre 2009 sistema minimocuadrático en el que la redundancia del sistema está en función del tiempo de observación. 3. Posicionamiento Relativo o Diferencial. En este método dos receptores (al menos) están simultáneamente observando satélites comunes, para establecer las ecuaciones de simples y dobles diferencias ya descritas en capítulos anteriores. De los dos, uno de ellos ha de estar en un punto de coordenadas conocidas o bien asignarle unas aleatorias, pero consideradas fijas, en un sistema de referencia, determinándose los incrementos de coordenadas. Es evidente que la ventaja de este método eliminación estriba de especialmente en la errores, el retardo ionosférico y troposférico, como ya se dijo al tratar el tema de errores, al anularse los errores si consideramos que estos tienen la misma magnitud en el mismo instante de observación en puntos no muy alejados, aunque también puede modelarse. FFig. 1. GPS diferencial Dentro de este método puede haber múltiples combinaciones en función del observable, movimiento o no de los receptores, etc. 3.1. Características generales. • Si se usa sólo código, la precisión está entorno al metro. • Minimiza los retardos atmosféricos. Tema 10 - 379 Curso avanzado de posicionamiento por satélite Madrid, noviembre 2009 • También se puede utilizar en Post-proceso ó Tiempo real, Estático o Cinemático • A este método, de forma genérica se le conoce también como DGPS, (Differential GPS). • Requiere al menos 2 receptores: “Equipo Base” y “Equipo móvil” (o móviles). • El Equipo base sobre un punto de coordenadas conocidas a priori. • El equipo móvil en el punto desconocido que se quiere determinar. • Ambos deben observar los mismos satélites. • El equipo base calcula el error en función de los datos recibidos y la posición conocida. • Las ‘correcciones diferenciales’ de la base se aplican a la posición del móvil. • El método es tanto más preciso cuanto mas iguales sean las condiciones de ambos equipos. • Se eliminan: 9 Errores de reloj de los SV`s. 9 Error orbital. 9 SA (si la hubiera). • Se disminuyen: 9 Efecto de la ionosfera 10 veces. 9 Efecto de la troposfera 2 veces. • Se mantiene: 9 Multipath. 9 Ruido del receptor. Tema 10 - 380 Curso avanzado de posicionamiento por satélite Madrid, noviembre 2009 3.2. Tipos de corrección diferencial. 3.2.1. Corrección de pseudodistancia. El fundamento es el siguiente: la "estación base" genera una corrección para cada una de las pseudodistancias observadas (PRC Pseudo Range Correction, Corrección a la pseudodistancia) y su variación con el tiempo (RRC Range Rate Correction), época a época, para los satélites observados. El equipo móvil aplica estas correcciones sobre los satélites que esté utilizando para calcular su posición. Este es el método más correcto. 3.2.2. Corrección por posición. Se utiliza cuando la estación móvil y base no observan la misma constelación. Se calcula la diferencia de latitud, longitud y altura elipsoidal en la "estación base" para aplicársela al móvil. Es el método más sencillo, pero tiene el incoveniente de que puede considerarse rigurosamente correcta sólo si en la base y el móvil se usan los mismos satélites (constelación idéntica). También podemos hablar dentro de esto de Corrección diferencial directa: Proceso normal. La estación móvil recoge las correcciones diferenciales y las aplica sobre sus observaciones obteniendo su posición corregida, y Corrección diferencial inversa: Se suele aplicar en control de flotas. Los datos recogidos por los distintos móviles se envían a un centro de control que dispone de correcciones diferenciales (o las obtiene mediante una "estación base") y las aplica a todos ellos, obteniendo su posición corregida. En este tipo de tecnología el móvil desconoce su posición corregida. Tema 10 - 381 Curso avanzado de posicionamiento por satélite Madrid, noviembre 2009 Fig. 3. Corrección diferencial inversa. Una vez vistas las generalidades del posicionamiento diferencial, vamos a ver los dos grandes grupos en calidad que existen: con código y con fase, siendo este último con todas sus variantes el que verdaderamente nos ha de interesar a nosotros, por su carácter puramente topográfico y geodésico en trabajos de precisión. 4. Posicionamiento relativo o diferencial con código. El posicionamiento diferencial con medidas de código se realiza resolviendo sistemas en simples diferencias, donde las incógnitas son las tres coordenadas de los puntos y el estado del oscilador de los receptores en cada época. Los resultados obtenidos con este método de posicionamiento son excelentes en muchos de los casos, incluso con distancias mayores de 200 Km. Las precisiones pueden alcanzar algunos decímetros, con repetitividad de medidas, siempre por debajo del metro. La evolución de las técnicas de tratamiento de los códigos en la medida de distancias está siendo espectacular, y este método está llamado a ser la nueva alternativa a los trabajos topográficos y geodésicos por sus altos rendimientos, facilidad en el tratamiento de datos y menor coste económico. Tema 10 - 382 Curso avanzado de posicionamiento por satélite Madrid, noviembre 2009 No obstante, las medidas de código pueden ser “suavizadas” por las medidas de diferencia de fase (si en la recepción éstas) se obtuvieron para obtener rendimientos aún mejores. El proceso de los datos código diferencial con puede hacerse en tiempo real y en post-proceso. Fig. 4. GPS diferencial con código Existe la posibilidad de trabajar en DGPS con un único receptor, al que se le debe sumar una unidad de control y un transmisor/receptor de radiofrecuencia que emite los datos de observación a una estación central de referencia, que envía datos de posicionamiento en formato RTCM o RTCA a la estación móvil, obteniendo la posición en tiempo real. Muchos organismos e instituciones públicas o privadas han puesto este servicio en funcionamiento, gracias al cual, con un receptor de bajo coste de código (300 $,∈) y un transmisor de radio convencional con conversor a mensajes formato RTCM se pueden obtener precisiones en tiempo real por debajo del metro. Tema 10 - 383 Curso avanzado de posicionamiento por satélite Madrid, noviembre 2009 Fig. 4. Sistema RASANT de correcciones diferenciales de código vía radio (España). Las aplicaciones más comunes del DGPS con código son: 9 Navegación de precisión. 9 Levantamientos y apoyo para cartografías de escalas menores de 1/5000. 9 Confección y actualización de sistemas de información geográfica. 9 Todo trabajo en general que no requiera precisiones mayores de 0,5 m. Tema 10 - 384 Curso avanzado de posicionamiento por satélite Madrid, noviembre 2009 5. Posicionamiento relativo o diferencial con fase. Es el que ofrece mayor precisión y plenamente utilizable en geodesia y topografía a través de todas sus variantes. El caso normal es el que permite disponer de soluciones en post-proceso, aunque en trabajos de topografía donde se necesite una gran cantidad de puntos (levantamientos), el resultado se ofrece en tiempo real, a través de fase (RTK). Características generales: ¾ Es posible determinar la posición del receptor móvil B en relación con el receptor referencia A si: 9 Las coordenadas de la estación de referencia A son conocidas. 9 Se recogen datos de 4 o más satélites en ambos receptores. ¾ Elimina el error de los satélites y los receptores. ¾ Minimiza los retardos atmosféricos. ¾ Precisión 5 mm + 1 ppm con código y fase. ¾ Post-proceso ó Tiempo real, Estático o Cinemático. Dependiendo de las observables, instrumental de observación y software de cálculo utilizados, podemos citar las siguientes técnicas o métodos posicionamiento diferencial: 5.1. Estático. Este modo de posicionamiento consiste en el estacionamiento de receptores que no varían su posición durante la etapa de observación. La referencia puede establecerse en cualquiera de ellos y la precisión será función del tiempo de observación, de la geometría y del instrumental utilizado. Sin duda es el método clásico para grandes distancias y el que ofrece mayor precisión: 5mm + 1ppm en la longitud de la baselinea. Se suele medir baselinea a baselinea, con Tema 10 - 385 Curso avanzado de posicionamiento por satélite Madrid, noviembre 2009 observaciones de una o más horas, cerrando figuras geométricas en la red que se quiere observar con un posterior ajuste MMCC de la misma. El tiempo de observación es proporcional a la longitud de la línea y también dependerá de otros factores: instrumento mono o bifrecuencia, precisión requerida, algoritmos de resolución (de ambigüedades), intervalo de toma de datos... Una variante en base a la geometría de la observación es el estático radial, en el que un receptor se estaciona en un punto de coordenadas conocidas y los demás se mueven alrededor. Es también usado en técnicas cinemáticas, aunque los puntos no tienen comprobación. Utilizado normalmente en levantamientos rápidos que no necesiten ser comprobados (Aerotriangulación redundate). Principales aplicaciones: ¾ Redes geodésicas. ¾ Confección de redes fundamentales en las cuales se vayan a apoyar trabajos de Cartografía, Fotogrametría o proyectos de ingeniería. ¾ Obtención de puntos de apoyo fotogramétrico. ¾ Control geométrico de cartografía. ¾ Control de deformaciones en superficies y estructuras. ¾ En general, todo tipo de aplicaciones en donde se necesite la máxima precisión. 5.2. Estático rápido. Este método es sólo utilizable con receptores de dos frecuencias que hagan la medida de fase tras la demodulación de la portadora por correlación con ambos códigos. El poder hacer dos determinaciones temporales del instante de emisión en la primera frecuencia al correlar con el código C/A y el P, y una tercera determinación al correlar el código P en la segunda frecuencia, ofrece la posibilidad mediante complejos algoritmos de cálculo de resolver todas las incógnitas en breve tiempo. Evidentemente, la incógnita fundamental es la ambigüedad, pudiéndose resolver en 5 o 10 minutos, Tema 10 - 386 Curso avanzado de posicionamiento por satélite Madrid, noviembre 2009 observaciones que sin el código P exigirían media hora o más para ofrecer igual redundancia y por tanto similar precisión. En definitiva, se calcula con fase y código P, en L1 y L2 el incremento de coordenadas entre estaciones. Se recomienda que las líneas-base midan menos de 20 kilómetros. Para una mayor redundancia de observaciones en este método, se disminuyen los intervalos de medida que se usan normalmente en el estático (de 15, 20 o 30 segundos se suele pasar a 1 o 3 segundos). La ventaja del método es que es sencillo, rápido y preciso. Por otro lado, no requiere mantener el contacto con los satélites entre estaciones y la precisión final está en 10 mm± 1 ppm, haciéndolo ideal para redes o levantamientos en pequeñas distancias. Se suelen distinguir dos modalidades a su vez dentro de este: a) Modo estático rápido ocupando sólo una estación. b) Modo estático rápido ocupando una segunda estación al cabo de más o menos una hora. Es en el modo a) donde se requiere de técnicas rápidas de resolución de ambigüedades, como por ejemplo combinación de código y portadora en receptores de código P de doble frecuencia (ya descrito) o métodos de búsqueda de ambigüedades con 6 o más satélites. En realidad, se utilizan las mismas técnicas que se aplican en el posicionamiento estático clásico, aunque con algoritmos de resolución de ambigüedades que requieren menos épocas de observación (ejemplo, FARA, Fast Ambiguity Resolution Algorithm). Dependiendo del tipo de receptor y cobertura de satélites, basta con tiempos de observación de 5 minutos con intervalo de toma de datos de 3 segundos y una media de 6 SV’s. En el método b) cada estación tiene que ser ocupada nuevamente después de un intervalo de tiempo entre los 50 y 120 minutos, siendo el tiempo de observación de una estación más corto, unos 3 o 4 minutos. El receptor puede perder toda comunicación con los satélites entre punto y punto o incluso, apagarlo. La idea básica Tema 10 - 387 Curso avanzado de posicionamiento por satélite Madrid, noviembre 2009 radica en el hecho de que se requieren datos de una configuración geométrica diferente para resolver las ambigüedades. Se considera a ambos conjuntos de datos como un solo conjunto con un salto de ciclo (cycle slip) intermedio, que puede ser fijado con técnicas de triples y dobles diferencias. Sin embargo, la fijación de un salto de ciclo con un lapso mayor de 30 minutos funciona sólo si se dispone de una alta calidad de datos (nivel bajo de ruido y efectos bajos de multipath) y si ocupaciones repetidas de las estaciones son exactamente las mismas (buen estacionamiento). Un esquema básico de observación con el método estático, ya sea normal o rápido en el que tengamos compensación de una red podría ser el siguiente: Fig. 6. Esquema de trabajo de estático relativo. • Paso 1 – Estacionar receptor referencia en la estación “BASE” de coordenadas conocidas. – Instalar una nueva estación “Ref2” con otro receptor. • Paso 2 – Usar las estaciones “BASE” y “Ref2” como Estaciones de Referencia. – Con un tercer receptor estacionar en los puntos 1,2,3,4 y 5. Tema 10 - 388 Curso avanzado de posicionamiento por satélite Madrid, noviembre 2009 • Paso 3 – Cuando se llega al límite de distancia del método se cambian las referencias. – Estacionar el receptor referencia en un punto ya levantado: “4”. – Establecer una nueva estación “Ref3” con un receptor móvil. • Paso 4 – Usar las estaciones “4” y “Ref3” como Estaciones Referencia. – Con la tercera unidad, levantar las estaciones 3, 5, 6 y 7. Como se ve, es siempre conveniente utilizar unos puntos "bisagra" para ir recorriendo la red, trabajando por bloques homogéneos en distancia, haciendo cuando esta sea excesiva que puntos anteriores sean comunes a los siguientes, teniendo posibilidad de ajuste y compensación de la red. 5.3. Método "Stop & Go" o semicinemático. Para posicionar un punto con el receptor móvil se realiza una parada en dicho punto de unas pocas épocas, después nos dirigimos al siguiente punto y actuamos de igual modo. El procedimiento se mantendrá hasta completar el trabajo o hasta sufrir una pérdida de señal que obligue a inicializar otra vez. Antes de eso, el receptor fijo requiere de una inicialización previa, observando durante algunos minutos para resolver ambigüedades. El intervalo de toma de datos suele establecerse en 1 segundo. Este método es apropiado para el levantamiento de puntos cercanos entre sí. La precisión del método siempre es función del tipo de instrumentación utilizado. La precisión nominal puede estar entre 1 y 5 cm. La principal característica de este método es que se hace una resolución de ambigüedades inicial en el punto (de coordenadas conocidas o no), y a partir de ahí, nos vamos moviendo al resto de los puntos del levantamiento. También podemos considerar que no hay ninguna diferencia entre los métodos estáticos y los cinemáticos Tema 10 - 389 Curso avanzado de posicionamiento por satélite Madrid, noviembre 2009 cuando se han resuelto y guardado las ambigüedades, la medición cinemática puede ser entendida como "la transferencia de ambigüedades de una estación a otra". • Paso 1: Modo Stop Antes de empezar hay que resolver la ambigüedad inicial. Existen tres variantes para resolverla: - Inicialización Estática, en un punto cualquiera con una pequeña observación estática. - Inicialización en un punto conocido, inicializador, de menor periodo de tiempo. Fig. 6. Inicialización en el modo semicinemático - Cambio de antena (antenna swapping): se situan dos receptores en dos estaciones cercanas. Una estación es de coordenadas conocidas, puesto que es la estación de referencia. La segunda se selecciona arbitrariamente. Se observan datos comunes aproximadamente un minuto. Después se intercambian las antenas, manteniendo la fijación de fase de los satélites observados y nuevamente se recolectan datos durante un minuto. La mayoría de los fabricantes incluyen estos tres posibles métodos de inicialización. • Paso 2: Modo Go - Una vez se han recogido suficientes datos para resolver las ambigüedades, se puede empezar a mover el receptor sin desconectarlo. – Resueltas las ambigüedades se comienza a visitar los puntos a levantar. Tema 10 - 390 Curso avanzado de posicionamiento por satélite Madrid, noviembre 2009 Fig. 6. Modo de trabajo en semicinemático – Se tiene que mantener el seguimiento continuo de al menos 4 satélites. – Cada punto requiere al menos dos épocas (2 segundos). – Si se pierde el seguimiento de los satélites mínimos (4) hay que volver a reinicializar la base. El método semicinemático o "stop and go" es muy eficiente en áreas abiertas, donde no se espere pérdida de señal causada por obstáculos. En caso de pérdida de señal y no poder ser recuperada, se tiene que empezar nuevamente con la medición con un paso nuevo de inicialización, el receptor móvil tiene que volver a la última marca coordenada de la medición. Es esencial que en tal caso, el receptor avise de la pérdida de señal. Quizás este método haya perdido validez y uso debido a la aparición en los últimos años de equipos RTK (Real Time Kinematic), con mucha más versatilidad en el funcionamiento y con un rendimiento muy superior en topografía. 5.4. Método cinemático puro. Para muchos objetivos es necesario determinar las coordenadas precisas de la trayectoria del receptor GPS móvil a lo largo de la trayectoria. Imagínese un levantamiento de la traza de una carretera para actualización de cartografía o por ejemplo, apoyo fotogramétrico de los centros de proyección, para reducción del número de puntos de apoyo en la aerotriangulación. Tema 10 - 391 Curso avanzado de posicionamiento por satélite Madrid, noviembre 2009 En estos casos no se puede aceptar una ruptura de la conexión sin la posibilidad de recuperación de la pérdida de la relación de fase de la señal o ambigüedades, mientras la plataforma de la antena se halle en movimiento. Por ello es necesario un método independiente de la técnica de inicialización estática que incluya la capacidad de recuperar la pérdida de fase y de resolver ambigüedades durante el movimiento. Esta técnica se conoce con el nombre de resolución de ambigüedades en movimiento u "on the fly" (OTF). La precisión llega a ser de unos 10 cm e incluso mejor en condiciones muy favorables de configuración de satélites, buenos receptores, sin multipath... El proceso de medida es semejante al anteriormente visto: • Paso 1: Modo Stop Inicialización estática del receptor móvil: inicialización con estático, baselínea conocida (inicializador). • Paso 2: Modo Movimiento –Una vez hay suficientes datos para resolver ambigüedades, el receptor se puede mover. –Mantener seguimiento al menos a 4 satélites. –El receptor móvil registra datos con un intervalo especificado. Fig. 8. Modo de trabajo cinemático. Características de esta técnica son: 9 Levantamiento continuo Tema 10 - 392 Curso avanzado de posicionamiento por satélite Madrid, noviembre 2009 9 Requiere planeamiento minucioso para evitar obstáculos a los satélites. 9 Hay que mantener seguimiento continuo a 4 satélites. 9 Apto para áreas abiertas y despejadas de vegetación, trabajos no críticos. 9 Necesita inicialización del equipo móvil: 5-10 minutos parado para resolver posteriormente ambigüedades en postproceso. 5.5. Resolución de ambigüedades OTF (on the fly). Como ya se ha indicado, esta técnica no necesita de una inicialización inicial estática previa, ya que se resuelven las ambigüedades con el receptor en movimiento a posteriori, siempre que se mantenga un seguimiento a un mínimo de 5 satélites en L1 y L2 durante un cierto tiempo. Si se pierde el seguimiento por algún obstáculo, se podrán resolver nuevamente las ambigüedades si se vuelve a registrar suficiente cantidad de datos con 5 satélites en L1 y L2, una vez recuperada la señal. Puede capturar los mismos elementos que el cinemático con aplicaciones semejantes: 9 Vuelos fotogramétricos. 9 Levantamientos de carreteras. 9 Levantamientos hidrográficos. La inicialización en modo OTF fue creada precisamente para estas aplicaciones descritas, para aplicar técnicas de resolución cinemática a elementos que no pueden estar parados para efectuar inicializaciones estáticas, como son barcos y aviones, y facilitar las aplicaciones que les conciernen, como levantamientos batimétricos y vuelos fotogramétricos. En el caso del avión en fotogrametría, el objetivo es conocer las coordenadas de la cámara en el momento de las tomas, y en el caso del barco en un levantamiento batimétrico, tener la información planimétrica puntual que completa las tres dimensiones con la medida directa de la ecosonda. Es evidente que si se produce una Tema 10 - 393 Curso avanzado de posicionamiento por satélite Madrid, noviembre 2009 pérdida de señal, la inicialización se vuelve a realizar sin tener que detener los vehículos, algo difícil de realizar en los dos casos mencionados. 5.6. Cinemático en Tiempo Real de Fase (RTK). Sin duda ninguna actualmente es el equipo que proporciona mayor eficacia, versatilidad, precisión y rendimiento para todo tipo de trabajos de topografía. En primer lugar, debe quedar claro que el trabajo en tiempo real no es un método de posicionamiento por satélite, sino que es una forma de obtener los resultados una vez procesadas las observaciones. El procesamiento de estas observaciones puede ser realizado con un software post-proceso, previa inserción de los datos de observación necesarios, ya sea en campo o en gabinete. Ahora bien, este cálculo puede ser realizado de forma inmediata a la recepción de las observaciones y ser efectuado por la unidad de control, obteniendo las coordenadas en el instante, es decir, en tiempo real. Para ello, se incorporan los algoritmos de cálculo de los software post-proceso, o parte de ellos, a los controladores para este tipo de aplicaciones. Esto supone una gran ventaja, ya que todo el tiempo que se invierte en insertar, tratar, chequear y procesar los datos se suprime al obtener los resultados al instante y a la vez permite edición de datos de un levantamiento en campo, replanteo, y todo tipo de labores en los cuales sea necesario el conocimiento de las coordenadas de los puntos en tiempo real. Pero también tiene una serie de inconvenientes, que lo serán mayores o menores en función del tipo de trabajo y las condiciones de la observación. Entre ellos destacan: ¾ La limitación de los radiomodem de emisión y transmisión de datos. Chocamos con el problema de las licencias de frecuencias y potencias de señal permitidas. Un equipo que funcione con 0,5 w, que está permitido por las autoridades, está limitado a un radio de acción de unos pocos Km (7-8 Km con seguridad), lo que limita el rendimiento del trabajo. Sin embargo, con potencias de señal mayores se puede llegar a trabajar en radios de hasta 50 km. Evidentemente, el incremento de la distancia a la referencia supone una degradación en la precisión de la solución. Tema 10 - 394 Curso avanzado de posicionamiento por satélite Madrid, noviembre 2009 Fig. 10. Equipamiento RTK. ¾ Imposibilidad de chequear los ficheros de observación. ¾ Limitación en las correcciones de tipo atmosférico. ¾ Limitación en los procesos de transformación de coordenadas. ¾ Pobre tratamiento e información estadística. ¾ Escasa manipulación de los parámetros de cálculo. Las ventajas compensan y con creces estos ligeros inconvenientes que no lo son tanto en labores de topografía (pequeñas distancias, datum locales, etc), que es donde más arraigo tienen estos equipos. En el argot actual de la Topografía aplicada al posicionamiento por satélite, se denomina equipo de trabajo con módulo RTK (Real Time Kinematic) a aquel que incorpora un software completo en la unidad de control y un sistema de transmisión de información que permite la obtención de resultados en tiempo real. Los módulos RTK pueden procesar observables de código y de diferencia de fase, y son aplicables a cualquier trabajo donde el posicionamiento por satélite sea necesario. Tema 10 - 395 Curso avanzado de posicionamiento por satélite Madrid, noviembre 2009 Fig. 10. Fundamento del RTK. Las fases del trabajo en tiempo real con módulo RTK son las siguientes: - El equipo de trabajo mínimo son dos equipos de observación (fijo y móvil), dos radio-modem (transmisor y receptor) y un controlador en la unidad móvil con un software de proceso de datos. - En primer lugar, se estaciona el equipo de referencia que va a permanecer fijo durante todo el proceso. El radio-modem transmisor va a transmitir sus datos de corrección (código y fase) por ondas de radio al receptor incorporado en el equipo móvil, que a su vez almacenará en la unidad de control. El proceso RTK comienza con una resolución preliminar de las ambigüedades. Esto es crucial en cualquier sistema cinemático. Actualmente, los equipos RTK son de doble frecuencia, pero también se pueden utilizar receptores que únicamente colectan L1. Los procedimientos RTK para resolución de ambigüedades siguen un procedimiento que suele ser: 1. Definir un área de búsqueda basado en una solución aproximada. Tema 10 - 396 Curso avanzado de posicionamiento por satélite Madrid, noviembre 2009 2. Chequear estadísticamente todas las posibles soluciones dentro de ese área. 3. Seleccionar la mejor solución entre todas de acuerdo a criterios estadísticos, por ejemplo, criterio de mínima varianza. 4. Validar la solución elegida de acuerdo a criterios estadísticos o por comparación con la segunda solución mejor candidata. Ya hemos hablado de la tremenda utilidad en topografía de estos equipos, sobre todo en levantamientos y en trabajos de obras de ingeniería. En la actualidad, los software de los controladores incorporan potentes programas para hallar datos de replanteo en cualquier sistema de referencia. Apoyados en la estación de referencia, podemos replantear cualquier punto en la superficie, ya que obtenemos información en tiempo real de la situación y dirección a seguir desde la referencia deseada (ya sea una base de replanteo, el punto anterior u otro que resulte de interés) para localizar y materializar el punto correspondiente. 6. Tiempos de observación y precisiones. Es esencial en el rendimiento de un trabajo GPS la elección del método apropiado con el tiempo de observación recomendable con vistas a conseguir la precisión tolerable. Se han realizado muchos estudios al respecto y aunque varía mucho de unos a otros autores, se pueden establecer los tiempos recomendados en las tablas adjuntas, fijándonos sobre todo en la longitud de las líneas base. A) Estático Tabla 1. Tiempos de observación en estático. B) Estático rápido Tema 10 - 397 Curso avanzado de posicionamiento por satélite Madrid, noviembre 2009 Tabla 2. Tiempos de observación en estático rápido. En el siguiente cuadro se da otra orientación sobre las precisiones esperables y los tiempos de trabajo: Tabla 3. Tiempos de observación y precisiones en los diferentes métodos. Finalmente en el siguiente se relacionan los diferentes métodos con las aplicaciones más comunes en topografía y geodesia: Tema 10 - 398 Curso avanzado de posicionamiento por satélite Madrid, noviembre 2009 Tabla 4. Aplicaciones y métodos. 7. Servicios DGPS. En los últimos tiempos, numerosas instituciones públicas están instalando servicios públicos de posicionamiento DGPS a través, sobre todo, de la emisión de correcciones diferenciales de estaciones permanentes GPS a través de diferentes medios. Dentro de estos servicios, según el tipo de correcciones envíadas, el nivel de precisión y sobre todo, el ámbito de cobertura, podemos distinguir dos variantes: redes WADGPS de satélites y correcciones de redes locales. 7.1. WADGPS. (Mº de Fomento) Bajo la denominación de redes WADGPS (Wide Area Differential GPS) se agrupan los sistemas que proveen correcciones diferenciales a los usuarios a partir de satélites geoestacionarios. Las correcciones troposféricas e ionosféricas son las que normalmente se transmiten en forma de parámetros de corrección de coordenadas. También se incluyen errores orbitales. Tema 10 - 399 Curso avanzado de posicionamiento por satélite Madrid, noviembre 2009 Fig. 11. Esquema operacional de un sistema WADGPS. Para el ámbito de la Unión Europea se dispondrá a principios de 2006 del sistema EGNOS (European Geostationary Navigation Overlay Service), que transmite correcciones diferenciales e ionosféricas, así como otros servicios de aumentación e integridad a través de satélites geoestacionarios. El sistema ha sido desarrollado por las principales agencias aeronáuticas de Europa bajo la dirección de la ESA (Agencia Espacial Europea). El sistema está compuesto por tres segmentos: • Segmento espacial. • Segmento terrestre. • Segmento usuario (receptores EGNOS). El sistema EGNOS proporcionará las siguientes funciones, que constituyen las aumentaciones requeridas para complementar las prestaciones de la constelación GPS/GLONASS: • Telemetría / GEO Ranging (R-GEO): Transmisión de señales GPS desde tres satélites geoestacionarios (INMARSAT III AOR-E, INMARSAT III IOR y el ARTEMIS). Al aumentar el número de satélites de navegación, aumentará la disponibilidad, continuidad y precisión del servicio. Tema 10 - 400 Curso avanzado de posicionamiento por satélite • Madrid, noviembre 2009 Integridad / GNSS Integrity Channel (GIC): Distribución de información de integridad. Esto aumentará la integridad del servicio de seguridad GPS/GLONASS/EGNOS de navegación hasta el nivel requerido para la aviación civil (no precisión). • Precisión / Wide Area Differential (WAD): Distribución de correcciones diferenciales. Esto incrementará la exactitud del servicio GPS/GLONASS/EGNOS de navegación y las prestaciones en general hasta alcanzar el nivel exigido para aproximaciones de categoría I. Con el desarrollo de estas funciones, se pueden identificar cinco niveles de servicio en la utilización del GPS/GLONASS más EGNOS: • NIVEL 1: Nivel preoperacional. Consistirá en la transmisión de señales similares al GPS desde los satélites GEO (telemetría). Con el aumento del número de satélites disponibles se incrementará la disponibilidad. El Nivel 1 se corresponde con el mínimo suministrado por el sistema EGNOS y se garantizará en todo el área de cobertura geoestacionaria. (área GEO). • NIVEL 2: Suministro del servicio de telemetría y de integridad (mediante la emisión de información de integridad). El aumento de integridad permitirá que el servicio cumpla los requerimientos de la aviación civil hasta aproximaciones de no precisión en el área de cobertura de la CEAC donde se reciban 2 señales geoestacionarias. • NIVEL 3: Suministro del servicio de telemetría, integridad y precisión (mediante la emisión de correcciones diferenciales). Supondrá un aumento del nivel de precisión que permitirá cumplir los requerimientos de la aviación civil, en principio hasta aproximaciones de precisión Cat-I en, al menos, la parte terrestre de la CEAC donde se reciban 2 señales geoestacionarias. • NIVEL 4: Añadiendo las redundancias necesarias en los segmentos espacial y terrestre, el nivel 2 evolucionará hacia el nivel 4, mejorando las prestaciones conseguidas, de tal forma que se cumplirán los requerimientos de la aviación civil hasta aproximaciones de no precisión en todo el área de cobertura. • NIVEL 5: Asimismo, añadiendo las redundancias necesarias, el nivel 3 evolucionará hacia el nivel 5, obteniendo una precisión tal que se cumplan los requerimientos de la aviación civil hasta aproximaciones de precisión Cat-1 en todo el área de cobertura . Tema 10 - 401 Curso avanzado de posicionamiento por satélite Madrid, noviembre 2009 Fig. 12. Funcionamiento básico de EGNOS (Fuente: Mº de Fomento). - Extensión de EGNOS para Latinoamérica. Como se muestra en la figura adjunta, los satélites INMARSAT–III AOR-E e HISPASAT (todavía no incluido en el sistema EGNOS) tienen cobertura sobre Latinoamérica, por lo que sería posible recibir ambas señales en esa región. Asimismo, existe la posibilidad de recibir la señal del satélite AOR-W (perteneciente al sistema WAAS estadounidense), en un principio interoperable con las señales europeas. Tema 10 - 402 Curso avanzado de posicionamiento por satélite Madrid, noviembre 2009 AOR-E (E GNOS ) A OR-W (W A A S ) IOR (E GNOS ) HIS P A S A T Fig. 13. Cobertura de EGNOS en Latinoamérica. La posible extensión de EGNOS a Latinoamérica se realizaría mediante el despliegue en esa región de estaciones terrestres específicas. Se ha llevado a cabo un estudio preliminar para determinar el número y localización de estaciones RIMS necesarias para proporcionar un servicio NPA (aproximaciones de noprecisión) en Latinoamérica. Suponiendo doble cobertura de satélites geoestacionarios en el área de servicio latinoamericana (INMARSAT-III, AOR-E e HISPASAT 2B, se necesitarían 6 RIMS para proporcionar un servicio de esas características. Similar a EGNOS, en América del Norte se dispone de WAAS (Wide Area Augmentation System), de la Administración Federal de Aviación (FAA). WAAS es un sistema de aumentación denominado SBAS (Satellite-Based Augmentation System) basado en las correcciones generadas en 25 estaciones terrestres y su diseminación vía satélite. 7.2. Correcciones de redes locales. (Hofmann-Wellenhof) Tradicionalmente, el posicionamiento diferencial con GPS siempre se ha llamado DGPS, en sentido amplio, pero se aplica al posicionamiento en tiempo real con dos o más receptores. Tema 10 - 403 Curso avanzado de posicionamiento por satélite Madrid, noviembre 2009 Como se ha explicado en anteriores apartados, en la estación de referencia se calculan las correcciones a la pseudodistancia (lo normal), denominado PRC (Pseudo Range Correction) y sus derivadas, RRC (Range Rate Correction), las cuales son transmitidas al receptor remoto en tiempo real. El receptor remoto aplica las correcciones a las medidas de pseudodistancias y mejora el posicionamiento con las pseudodistancias corregidas, mejorando la precisión posicional con respecto a la estación base. 7.2.1. DGPS con medidas de código. La medida de código en una estación base A desde el satélite j en una época t0 puede ser modelada como: R Aj (t 0 ) = ρ Aj (t 0 ) + Δρ Aj (t 0 ) + Δρ j (t 0 ) + Δρ A (t 0 ) (1) donde: • ρ Aj (t 0 ) • Δρ Aj (t 0 ) es el error de la medida dependiente de la estación base terrestre es la medida geométrica de pseudodistancia. así como de la posición del satélite (error radial orbital, efectos de refracción...). • Δρ j (t 0 ) es el error dependiente únicamente del satélite (por ejemplo, error del reloj del satélite). • Δρ A (t 0 ) es el error dependiente únicamente del receptor (por ej. error del reloj del receptor, multipath...). La corrección a la pseudodistancia para el satélite j en la época t0 es definida por la relación: PRC j (t 0 ) = ρ Aj (t 0 ) − R Aj (t 0 ) = −Δρ Aj (t 0 ) − Δρ j (t 0 ) − Δρ A (t 0 ) la cual puede calcularse a partir de la medida geométrica (2) ρ Aj (t 0 ) obtenida a partir de la posición conocida de la estación de referencia y las efemérides transmitidas y R Aj (t 0 ) es la cantidad medida. Tema 10 - 404 Curso avanzado de posicionamiento por satélite Madrid, noviembre 2009 Además de la corrección a la pseudodistancia PRCj(t0), se calcula en la estación base también su derivada con el tiempo RRCj(t0). Ambas correcciones están referidas a la época de referencia t0 y son transmitidas a la estación B (“rover” o móvil) en tiempo real. En B la corrección a la pseudodistancia es predicha para la observación en la época t usando la relación: PRCj(t) = PRCj(t0) + RRCj(t0) (t – t0) (3) donde la cantidad (t – t0) es conocida como “latencia”. Es evidente que la precisión que se puede conseguir se incrementa para pequeñas variaciones de las correcciones de pseudodistancia y cuanto más pequeña sea la latencia. Considerando la expresión general (1) para el punto B y la época t, la medida de pseudodistancia de código puede ser modelada como: R Bj (t ) = ρ Bj (t ) + Δρ Bj (t ) + Δρ j (t ) + Δρ B (t ) (4) Aplicando la corrección a la pseudodistancia predicha PRCj (t) a la expresión (3) a la j medida de pseudodistancia en el punto B, R B (t ) resulta: R Bj (t ) CORR = RBj (t ) + PRC j (t ) (5) o bien sustituyendo (4) en la corrección a la pseudodistancia según (2) y (3), respectivamente se llega a: [ ] RBj (t ) CORR = ρ Bj (t ) + Δρ Bj (t ) − Δρ Aj (t ) + [Δρ B (t ) − Δρ A (t )] (6) donde los errores dependientes del satélite se han cancelado. Para distancias moderadas entre la base y el rover, los errores satélite-receptor están altamente correlados. Por ello, la influencia de los errores orbitales radiales y la refracción son reducidos considerablemente. Despreciando esos errores, la ecuación (6) se simplifica a: R Bj (t ) CORR = ρ Bj (t ) + Δρ AB (t ) Tema 10 - 405 Curso avanzado de posicionamiento por satélite Madrid, noviembre 2009 siendo Δρ AB (t ) = Δρ B (t ) − Δρ A (t ) . Si no existe error por multipath, este término se convierte en el error de reloj del receptor, en términos de distancia, queda: Δρ AB (t ) = cδ AB (t ) = cδ B (t ) − cδ A (t ) 7.2.2. DGPS con medidas de fase. Recordamos que la ecuación de observaciones de fase, en ciclos, puede escribirse como: Φ ij (t ) = 1 λ ρ i j (t ) + N i j + f j Δδ i j (t ) donde: • λ es la longitud de onda. • ρ i j (t ) es la pseudodistancia para medidas de fase (lo mismo que en el código). • N i j es la ambigüedad de fase, independiente de t y es un número entero. • f • Δδ i j (t ) es el error de reloj combinado satélite-receptor. j es la frecuencia de la señal del satélite. Si generalizamos esa expresión, la medida (esta vez en términos de distancia) en la estación base A en la época t0 puede ser modelada como: λΦ Aj (t 0 ) = ρ Aj (t 0 ) + Δρ Aj (t 0 ) + Δρ j (t 0 ) + Δρ A (t 0 ) + λN Aj donde, por analogía con el modelo de código: • ρ Aj (t 0 ) es la distancia geométrica satélite – receptor en la estación base A. • Δρ Aj (t 0 ) es el conjunto de errores dependientes del conjunto satélite – receptor. • Δρ j (t 0 ) son los errores dependientes del satélite. Tema 10 - 406 Curso avanzado de posicionamiento por satélite • Madrid, noviembre 2009 Δρ A (t 0 ) son los errores dependientes del receptor. Consecuentemente, la corrección a la medida de fase en la época de referencia t0 será: PRC j (t 0 ) = ρ Aj (t 0 ) − λΦ Aj (t 0 ) = − Δρ Aj (t 0 ) − Δρ j (t 0 ) − Δρ A (t 0 ) − λN Aj Como vemos, la formulación de las correcciones a las medidas de fase en la estación A así como la aplicación de las correcciones predichas a la fase observada en la estación “rover” B se lleva a cabo exactamente igual que en el caso de las medidas de código: j λΦ Bj (t ) CORR = ρ Bj (t ) + Δρ AB (t ) + λN AB donde Δρ AB (t ) = Δρ B (t ) − Δρ A (t ) y el término N AB son las simples diferencias de j ambigüedades de fase. Si se elimina el multipath, el término Δρ AB (t ) simboliza el error de reloj combinado satélite – receptor, que, escalado a distancia sería Δρ AB (t ) = cδ AB (t ) = cδ B (t ) − cδ A (t ) . El posicionamiento en el punto B (rover) es mejorado con la pseudodistancia de fase corregida λΦ Bj (t) CORR . La configuración básica para DGPS con medidas de fase es idéntica que para posicionamiento cinemático con medida de fase. Evidentemente, las aplicaciones más precisas de DGPS son estas, en las que se realizan medidas de fase y en las que se hace una resolución de ambigüedades inicial en tiempo real en la estación base. Esto se suele hacer con las denominadas técnicas OTF (On-The-Fly) de resolución de ambigüedades, en las que son necesarios al menos 5 satélites comunes en la base y en el rover. Si la latencia es prácticamente cero, el diferencial DGPS con fase es lo que se denomina RTK (Real Time Kinematic). 7.2.3. Mensajes RTCM. Aunque la mayor parte de fabricantes desarrollaron su propio formato para la transmisión de correcciones diferenciales, el formato está estandarizado desde 1985, de acuerdo a la propuesta de la Radio Technical Commission for Maritime Services, Comité 104. El estándar es conocido como formato RTCM. Tema 10 - 407 Curso avanzado de posicionamiento por satélite Madrid, noviembre 2009 Hay 64 tipos de mensajes disponibles, aunque la mayoría aún no han sido definidos. Se definirán, por ejemplo, para satélites geoestacionarios, GALILEO, etc. Actualmente se está ya en la versión 3.0. La versión 2.0 incluye mensajes para hacer posible la corrección a las pseudodistancias y variación con el tiempo a la corrección de éstas. La versión 2.1 contiene además tipos para las correcciones a las medidas de fase. Hay 64 tipos de mensajes disponibles. El formato de los mensajes consiste en secuencias de palabras de 30 bits. Los últimos 6 bits en cada palabra son los bits de paridad. Cada mensaje comienza con dos palabras cabecera. La primera palabra es fija y contiene lo que se denomina preámbulo (preamble), el tipo de mensaje, y el identificador de la estación de referencia. La segunda palabra contiene la marca de tiempo en forma de cuenta Z, el número de secuencia, la longitud de mensaje y la salud de la estación de referencia. En algunos mensajes hay una tercera palabra. Los mensajes 1-17 estaban disponibles en la versión 2.0, mientras que los mensajes 18-21 contienen cabeceras de 3 palabras, fueron añadidos en la versión 2.1 y tienen como propósito el posicionamiento RTK (Real Time Kinematic, Cinemático en Tiempo Real) de aplicación en receptores que admitan esta técnica. Los mensajes relacionados con GLONASS se incluyeron en la versión 2.2. Los mensajes 18 y 19 contienen la observación de fase y código en la estación de referencia y son los fundamentales para posicionamiento relativo. Los mensajes 20 y 21 contienen las correcciones a las correspondientes medidas, y sirven por tanto, para el posicionamiento diferencial (DGPS). Tema 10 - 408 Curso avanzado de posicionamiento por satélite NÚMERO DE MENSAJE 1 2 3 4 5 6 7 8 Fixed Fixed Fixed Retired Fixed Fixed Fixed Tentative 9 Fixed 10 11 12 13 14 15 16 17 Reserved Reserved Reserved Tentative Reserved Reserved Fixed Tentative 18 Tentative 19 Tentative 20 21 22-58 59 60-63 Tentative Tentative Undefined Tentative Reserved ESTADO ACTUAL Madrid, noviembre 2009 TÍTULO Differential GPS Corrections Delta Differential GPS Corrections Reference Station Parameters Surveying Constellation Health Null Frame Beacon Almanacs Pseudolite Almanacs Partial Satellite Set Differencial Corrections P-Code Differential Corrections (all) C/A-Code L1, L2 Delta Corrections Pseudolite Station Parameters Ground Transmitter Parameters Surveying Auxiliary Message Ionosphere (Troposphere) Message Special Message Ephemeris Almanac Uncorrected Carrier Phase Measurements Uncorrected Pseudorange Measurements RTK Carrier Phase Corrections RTK Pseudorange Corrections Proprietary Message Multipurpose Usage 7.2.4. Formas de transmisión de correcciones diferenciales en DGPS. Ejemplos en el Instituto Geográfico Nacional. (F. J. G. Matesanz) Las instituciones públicas están suministrando servicios públicos de DGPS en diferentes modalidades y medios de transmisión. La más extendida últimamente es a través de Internet, mediante la conexión en tiempo real a un servidor que suministra correcciones en formato RTCM de diferentes estaciones permanentes de referencia. 7.2.4.1 DGPS sobre radio analógica (RDS): proyecto RECORD. El proyecto RECORD (Red Española de CORrecciones Diferenciales) trata de la difusión de correcciones diferenciales GPS a través de la subportadora no audible RDS (Radio Data System, Sistema de Datos en Radio) de las emisoras de Radio Nacional de España (RNE). Tema 10 - 409 Curso avanzado de posicionamiento por satélite Madrid, noviembre 2009 La corrección diferencial GPS de código, obtenida a partir del observable de pseudodistancia suavizada con fase, se dispone en formato RTCM SC104. A continuación, es analizada y comprimida en formato RASANT 2.6 (Radio Aided Satellite Navigation Technique, Técnica de Navegación Asistida por Satélite). En este formato se envía a RNE quien lo incorpora a la señal FM que se emite. Un receptor FM/RDS/RASANT descomprime y proporciona las correcciones originales RTCM SC04 integrables en la gran mayoría de receptores GPS. Fig. 14. Esquema de funcionamiento de RECORD. El sistema tiene monitorización integrada. Para ello se ha instalado en el IGN un triple equipo GPS (2RS+IM) asegurando la fiabilidad, continuidad e integridad de las correcciones. Las correcciones diferenciales en formato RTCM se generan y comprimen en el IGN, donde son enviadas a RNE. En RNE se integran en el servidor RDS encargado de transmitir y mezclar las distintas tramas RDS. Desde RNE se inyectan en el satélite Hispasat y se difunden a los centros emisores. Las distintas emisoras FM difunden las correcciones diferenciales que reciben de Hispasat según el esquema de la figura. Tema 10 - 410 Curso avanzado de posicionamiento por satélite Madrid, noviembre 2009 Fig. 15. Transmisión de correcciones DGPS en RECORD. Los potenciales usuarios para la explotación del sistema necesitan un receptor FM/RDS/RASANT. Este receptor sintoniza la emisora más adecuada, eligiendola entre toda la banda o de una tabla programable residente en el receptor y, realiza la decodificación de RASANT a formato RTCM utilizable por la mayoría de los receptores o sensores GPS. Estos receptores de FM pueden incluir en su interior un sensor GPS en cuyo caso la salida de datos proporciona directamente posiciones corregidas susceptibles de ser incorporadas en una aplicación específica. Tema 10 - 411 Curso avanzado de posicionamiento por satélite Madrid, noviembre 2009 Fig. 16. Esquema de instrumentación. 7.2.4.2. DGPS sobre radio digital (DBS). Se han realizado con éxito pruebas de transmisión de correcciones diferenciales mediante radio digital DAB (Digital Audio Broadcasting) utilizando el canal de datos no asociado al audio (NPAD), enviando mensajes RTCM de código (Tipo 1) y de fase RTK (tipos 18 al 21). Los test realizados con baselínea cero y equipos de doble frecuencia con capacidad de determinar ambigüedades sin inicialización (OTF) muestran una calidad centimétrica en el posicionamiento. Tema 10 - 412 Curso avanzado de posicionamiento por satélite Madrid, noviembre 2009 Fig. 17. Pruebas realizadas de DGPS (código y fase) sobre DAB. Sin duda la gran incógnita en esta forma de transmisión es saber hasta dónde se implantará la radio digital en los usuarios, ya que, aunque la tecnología está disponible, no se han lanzado al mercado masivamente los equipos receptores de radio digital. Como ventajas de este sistema se pueden citar: • Calidad de audio comparable a la de un CD. • La señal no sufre atenuación. • No sufre interferencias debido al multipath. • Equipos de radio más amigables. • Los programas tienen mucha más información integrada,no solo audio. • Es posible añadir información de terceros. El protocolo de transferencia MOT (Multimedia Object Transfer protocol) permite difundir: • Datos generales: MIME/HTTP Tema 10 - 413 Curso avanzado de posicionamiento por satélite • Imágenes: JPG,GIF,JFIF y BMP • Texto (ASCII, ISO 646,ISO 8859-1) • HTML (ISO 8859-1) • Multimedia: MPEG (ISO/IEC 13522), Java • Archivos genéricos (TDC Transparent Data Channel) Madrid, noviembre 2009 Las aplicaciones dentro de nuestro campo son innumerables, desde transmisión de cartografía en tiempo real, transmisión de correcciones diferenciales en fase (permitiendo el posicionamiento centimétrico), levantamientos y replanteos en tiempo real apoyados en cartografía o en SIG interactivamente, datos de alerta, como información sísmica incluyendo cartografía, información de prensa, parámetros del sismo, etc. 7.2.4.3. DGPS sobre Internet (DGPSIP): proyecto EUREF-IP. (http://igs.ifag.de/euref_realtime.htm) Con el incremento de capacidad de transmisión de Internet se han desarrollado aplicaciones para la transmisión continua de datos. Las aplicaciones DGPS sobre Internet, aunque requieren un flujo continuo de datos, no necesitan un ancho de banda exageradamente grande. La subcomisión EUREF (EUropean REference Frame) de la Asociación Internacional de Geodesia ha puesto en marcha recientemente un proyecto denominado EUREF-IP, que contempla la transmisión de datos brutos GPS así como correcciones diferenciales de código y fase en formato RTCM. La recepción de correcciones diferenciales se realiza a través de cualquier equipo que tenga acceso a Internet: ordenador, PDA con GPRS, etc. y el ancho de banda requerido para aplicaciones de código se cifra en unos 50 bytes/segundo mientras que en fase (RTK) unos 500 bytes/segundo. Si tenemos en cuenta que las aplicaciones usuales de teleconferencia o Internet-Radio necesitan unos 5-20Kbit/segundo estamos hablando de un ancho de banda para aplicaciones GPS relativamente pequeño. La mayor parte de la actividad en este campo es llevada a cabo a través de la diseminación de datos GPS (DGPS) en forma de correcciones diferenciales para posicionamiento preciso y navegación mediante el protocolo RTCM con mensajes 1-3 Tema 10 - 414 Curso avanzado de posicionamiento por satélite Madrid, noviembre 2009 para DGPS y 18/19 o 20/21 para RTK. El sistema ha sido diseñado para que el dato enviado no sea modificado de forma alguna. En consecuencia es posible difundir cualquier “stream” de datos sin limitación alguna; en la actualidad se están transmitiendo tanto correcciones GPS como EGNOS, datos brutos, efemérides ultrarápidas o incluso datos sísmicos. NTRIP es la nueva tecnología para transferir datos GNSS (por ejemplo correcciones RTCM) mediante redes de Internet o de telefonía móvil. Los test realizados no muestran una pérdida significativa de prestaciones comparado con el uso de otros medios de transporte. El software NTRIP se ha desarrollado dentro de EUREF bajo licencia GNU y en la actualidad existe un grupo de trabajo dentro del comité 104 de RTCM entre cuyos fines se encuentra hacer de NTRIP un estándar internacional. Para acceder a los datos se puede descargar el programa cliente disponible para varias plataformas (Linux, Windows o Windows CE) en http://igs.ifag.de/ntrip_down.htm y escoger de la lista de servidores. Existen multitud de implementaciones comerciales en receptores GPS que ya incorporan NTRIP en el propio menú del receptor. Se han realizado diversos test, tanto en modo dinámico como estático, con excelentes resultados. Ejemplo significativo es que se fijaron ambigüedades estando a 22 km de la referencia y en tan solo 18 segundos, utilizando un receptor GPS de doble frecuencia conectado a un teléfono móvil GPRS. DistRef 5015 10403 10403 14649 14649 20493 20640 27568 E Dif -0.008 0.003 0.014 -0.014 -0.041 0.010 0.007 Nofix N Dif 0.006 0.008 0.023 0.055 0.034 -0.008 0.021 h Dif 0.028 0.046 0.022 0.008 0.010 0.020 0.021 #SV 10 6 8 5 9 7 9 Solución fija Tiempo 429 105 357 460 374 362 134 E Dif -0.020 0.247 0.147 0.286 -0.009 -0.464 -0.745 0.156 N Dif h Dif #SV -0.111 0.197 10 0.299 0.768 6 -0.369 0.036 8 0.051 1.000 5 0.073 0.442 9 -0.304 -3.164 7 0.283 -0.163 8 -0.493 0.342 8 Solución flotante Tiempo 51 541 82 192 8 11 89 600 Punto BM5 BM10 BM10 BM15 BM15 VILLE VILLT Lomo Tabla 1. Test efectuado y resultados (F.J.G.Matesanz). En el mercado hay multitud de software (libre o comercial) para la transmisión de correcciones a través de Internet. Tema 10 - 415