BOLETÍN DE PROBLEMAS 2: DIN ´AMICA VECTORIAL DEL S
Anuncio

Ampliación de Fı́sica (MECÁNICA), Curso 11/12 (Ing. Industriales)
BOLETÍN DE PROBLEMAS 2:
D IN ÁMICA V ECTORIAL
DEL
S ÓLIDO R ÍGIDO .
1. Una placa homogénea de densidad σ tiene forma de disco de radio 3a y centro O con un “hueco” en forma de triángulo
isósceles inscrito, ABC, cuya base AB (lado desigual) coincide con un diámetro del disco (por tanto, la placa es simétrica
respecto de la recta OC). ¿Cuánto vale la distancia desde O hasta el centro de masas de la placa?
2a/(3π − 3) ;
a/(π − 1) ;
a/(3π − 3) .
2. Una varilla homogénea, de centro O, longitud L y masa m, tiene en sus extremos dos partı́culas A y B, también de masa
m. ¿Cuál es el momento de inercia del sistema respecto a una recta que pasa por O y que forma un ángulo de 30o con la
varilla?
7
7
7
mL2
mL2
mL2 .
;
;
24
48
16
3. Considérense dos varillas idénticas, de masa m y longitud a, unidas por uno de sus extremos (O) en ángulo recto, formando
una “L”. Sea r una recta en el plano de las varillas, que pasa por O y forma un ángulo α con una de ellas. Si el momento
de inercia de la “L” respecto de r vale ma2 /3, entonces:
α tiene que valer π/4
;
α tiene que valer π/3
;
α puede tomar cualquier valor.
4. Se tiene una placa homogénea de masa M , lados {a, b} y centro de masas G. Considere los ejes de la figura {E1 , E2 , E3 },
deduzca razonadamente en cuales de sus puntos -uno, todos o ninguno- son E.P.I., y obtenga en estos casos las direcciones
principales. Razone qué nuevas direcciones principales aparecen si particularizamos para la placa cuadrada, con a = b.
Discuta qué ocurre para otras figuras regulares con esta degeneración diametral (polı́gonos y cualquier figura plana regular
G al hacer girar la
como la estrella de N puntas, el trébol de N hojas, etc.), ¿qué dirección tendrá el momento cinético L
figura respecto de cualquier diámetro –eje baricentral contenido en el plano material–?
Problema 4
Problema 5
5. Se tiene un aro homogéneo de masa M , radio R, centro O que gira con velocidad angular ω
respecto de un eje E (O,u)
O , y la
que forma 60o con su eje de revolución. Calcule el momento de inercia respecto al eje E, el momento cinético L
O y energı́a cinética T . ¿Qué ángulo forman L
ω?, ¿es E un eje principal?.
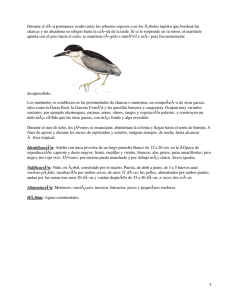
6. La barra AB de la figura, de masa m y longitud l = 2a, se mueve en plano vertical con sus extremos B y A apoyados
respectivamente sobre los ejes cartesianos OX1 y OY1 . Considere un coeficiente de rozamiento μ en el contacto B y que
el apoyo en A es liso. Suponga iguales el coeficiente de rozamiento estático y el dinámico. La posición del sistema viene
determinado por el ángulo θ de la figura.
(a) Determine el ángulo máximo de equilibrio θmax .
(b) Suponga μ = 0 y determina una integral primera del movimiento en caso de apoyos bilaterales. Condiciones iniciales:
θ(0) = 0+ , Reposo.
(c) Determine, bajo las condiciones del apartado anterior, el ángulo θ = θd con el que la barra despegarı́a por su extremo
A en caso de apoyo unilateral en ese punto.
1
Ampliación de Fı́sica (MECÁNICA), Curso 11/12 (Ing. Industriales)
Problema 6
Boletı́n de problemas 2
Problema 7
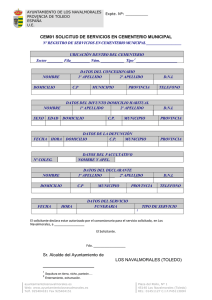
7. Se tiene una barra OA (L = 2a , M ) articulada en O y contenida en un plano vertical OX1 Y1 con g = −gj1 . La posición
de la barra viene dada por el ángulo θ formado con OY1 . Inicialmente en t = O se cumple que θ(0) = π/6, siendo
θ̇(0) = 0.
O , T y la energı́a potencial V .
(a) Calcule L
(b) Aplique el T.M.C. en O y obtenga una ecuación diferencial de movimiento del sólido.
(c) Obtenga una ecuación diferencial de movimiento en forma de integral primera. Compruebe que la solución de ambas
O (θ) .
ecuaciones es la misma. Calcule la fuerza vincular Φ
√
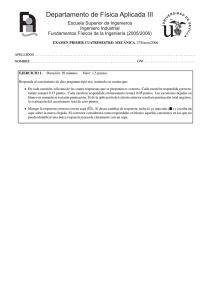
8. El sistema de sólidos de figura está formado por una varilla (sólido “2”, masa m, longitud l2 = 2 2a) y por una placa
cuadrada (sólido “0”, masa m, lado l0 = 2a) articulados entre sı́ en el punto B. Sobre el eje OX1 se apoyan el extremo A
de la barra y el lado BD del cuadrado. Todos los contactos son lisos. Sobre el extremo A se aplica una fuerza horizontal
creciente F = 2λmgı1 (λ = t/T ) , donde T es una constante del problema. Inicialmente (t = 0), el sistema está en
reposo y A coincide con O.
(a) Calcule la aceleración del sistema, los valores de las fuerzas vinculares y la posición de la fuerza normal en BD,
todo ello en función del tiempo.
(b) Calcule el instante de tiempo t = tv en que el vértice B empieza a despegar (condición de vuelco) y el trabajo
realizado hasta ese instante por la fuerza F .
Problema 8
Problema 9
√
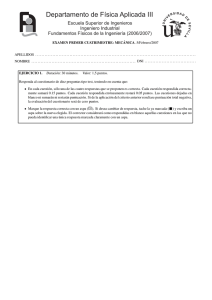
9. El sistema de sólidos de figura está formado por una varilla (sólido “2”, masa m, longitud l2 = 2b = 2 2a) y por una
placa cuadrada (sólido “0”, masa m, lado l0 = 2a) articulados entre sı́ en el punto B. Sobre el eje OX1 se apoyan el
extremo A de la barra y el lado BD del cuadrado. Todos los contactos son lisos salvo el apoyo del cuadrado que tiene
coeficiente de rozamiento μ suficientemente grande como para evitar el deslizamiento. Sobre el extremo A se aplica una
fuerza horizontal F = 2λmgı1 donde λ es un parámetro del problema. Inicialmente, A coincide con O.
(a) Obtenga el sistema de ecuaciones que permite determinar la ecuación diferencial movimiento y las fuerzas vinculares
del problema.
(b) Suponiendo que λ = λ0 (cte.) , demuestre que el trabajo de F es conservativo: VF (x) = −F0 x , donde F0 =
2λ0 mg . Obtenga el movimiento del sistema en forma de integral primera, suponiendo reposo inicial.
10. La placa cuadrada de la figura (sólido “2”, masa m, lado l = 2a) está sometida a un para motor τ = −τ (t)k en G, donde
τ (t) = τ0 t/T , siendo τ0 y T valores constantes. El contacto con el eje OX1 es rugoso de coeficiente de rozamiento μ
suficientemente grande como para evitar el deslizamiento. Inicialmente, el sistema está en reposo y θ(0) = 0.
2
Ampliación de Fı́sica (MECÁNICA), Curso 11/12 (Ing. Industriales)
Boletı́n de problemas 2
(a) Calcule el instante de tiempo t = tv en que el vértice A empieza a despegar (condición de vuelco).
(b) Determine la ecuación diferencial de movimiento y las fuerzas vinculares en función de θ, θ̇, θ̈ .
(c) Suponiendo ahora que τ (t) = τ0 (cte.) , demuestre que el trabajo de τ es conservativo: Vτ (θ) = −τ0 θ . Obtenga el
movimiento del sistema en forma de integral primera, suponiendo reposo inicial. Escriba cualitativamente cómo podrı́a calcular el coeficiente de rozamiento mı́nimo, μmin , necesario para realizar la operación descrita en el problema
(0 < θ < π/2) .
Problema 10
11. El sistema de la figura consiste en un aro rı́gido de radio R, masa m y centro C, contenido siempre en el plano vertical
fijo OX1 Y1 . El aro puede girar sin rozamiento alrededor de su punto A, el cuál desliza sobre el eje fijo OX1 según la ley
horaria x(t) = R cos ωt, para la coordenada horizontal de dicho punto.
(a) Aplique el teorema del momento cinético en el punto A y, a partir de éste, determine las ecuaciones de movimiento
del sistema mecánico descrito.
(b) Calcule las fuerzas vinculares que actúan sobre el sólido rı́gido. Discuta la conservación de la energı́a mecánica del
sistema.
(c) Suponiendo ahora que el punto A desliza libremente sobre el eje OX1 , discuta la existencia de integrales primeras
del movimiento, e indique si son suficientes para determinar –salvo condiciones iniciales– la evolución del sistema.
Problema 11
Problema 12
12. Un disco homogéneo de masa m y radio R (sólido “2”) sube por el plano inclinado y rugoso (sólido “1”) descrito en la
figura. El trayecto se divide en dos tramos dinámicamente distintos pero con continuidad cinemática entre ellos:
Tramo I.- El disco rueda y desliza hasta alcanzar la condición de rodar sin deslizar en el punto final del tramo. Calcule la
ecuación horaria x = x(t) y el tiempo empleado en este tramo.
Tramo II.- El disco sigue subiendo, rueda sin deslizar, y sufre la acción de un par motor conocido τ = −τ0k1 (τ0
constante) aplicado sobre el eje normal al plano del disco que pasa por G. Calcule el tiempo empleado en este tramo y la
fuerza de rozamiento. Discuta cualitativamente este problema en función de τ y de la pendiente del plano inclinado.
Datos.- El coeficiente de rozamiento dinámico entre el disco y el plano inclinado es μ. Las condiciones iniciales son:
x(0) = 0, ẋ(0) = 0; θ(0) = 0, θ̇(0) = ω0 > 0 .
13. Una barra homogénea OA (sólido “2”, L = 2a , M ) está articulada en O moviéndose en el espacio tridimensional
OX1 Y1 Z1 con su posición descrita mediante las coordenadas {ψ , θ}, ángulos de precesión y nutación respectivamente.
En la figura se facilitan unos ejes OX2 Y2 Z2 para el sólido y unos ejes auxiliares intermedios OX0 Y0 Z0 . Los contactos son
ideales y la gravedad
es constante g = −gk1 . Tenga en cuenta que
las condiciones iniciales vienen dadas por las siguiente
información: ψ(0) = 0 , θ(0) = π/6 , ψ̇(0) = ωo , θ̇(0) = 0
3
Ampliación de Fı́sica (MECÁNICA), Curso 11/12 (Ing. Industriales)
Boletı́n de problemas 2
O , T y la energı́a potencial V .
• Calcule L
• Obtenga las ecuaciones diferenciales de movimiento en forma de integrales primeras.
Problema 13
14. El sólido “2” del sistema mecánico de la figura consiste en un disco homogéneo de centro C, radio R y masa m, rı́gidamente
unido a una barra CA perpendicular al disco, de longitud R y masa despreciable. El extremo A de dicha barra está
engarzado a una pieza de dimensiones y masa despreciables que mantiene a aquélla siempre perpendicular al eje vertical
OZ1 , permitiendo a la vez que el sólido “2” pueda girar alrededor de dicho eje y del eje colineal con CA, de forma
simultánea. Por su parte, la pieza antes mencionada está obligada a deslizar por el eje OZ1 , hallándose conectada al punto
fijo O mediante un resorte de constante recuperadora k y longitud natural R. Sabiendo que en el instante inicial (t = 0), el
estado del sistema viene dado por el siguiente conjunto de valores: z(0) = R; θ(0) = 0; ϕ(0) = 0; ż(0) = 0 ; θ̇(0) = ω;
ϕ̇(0) = Ω.
(a) Calcule las reacciones vinculares en el punto A y las ecuaciones horarias z = z(t), θ = θ(t) y ϕ = ϕ(t). Particularice: obtenga las posibles posiciones de equilibrio del sistema y las correspondientes reacciones vinculares.
(b) Determine las integrales primeras del movimiento, obteniendo a partir de ellas las leyes horarias z = z(t), θ = θ(t)
y ϕ = ϕ(t).
Problema 14
Problema 15
15. El sólido “2” de la figura está formado por una barra OG de longitud L y masa despreciable, cuyo extremo O está
conectado al eje vertical fijo O1 Z1 , a una altura R, mediante una rótula ideal (sin rozamiento) que permite que la barra
gire libremente. El extremo G de la barra está unido rı́gidamente al centro de un disco de radio R y masa m, y el contacto
del disco con el plano O1 X1 Y1 en el punto C es liso.
Para describir la posición del sólido se utilizarán los ángulos de Euler indicados en la figura: ψ para la precesión, φ para la
rotación propia y θ para la nutación, que este caso está fijado (θ = 90o ). Inicialmente (t = 0) el estado del sistema viene
dado por: ψ(0) = 0, φ(0) = 0, ψ̇(0) = ω y φ̇(0) = Ω.
4
Ampliación de Fı́sica (MECÁNICA), Curso 11/12 (Ing. Industriales)
Boletı́n de problemas 2
(a) Desvincule el sólido “2” de “1” por dos siguientes métodos:
• Mediante las fuerzas locales de contacto en los puntos O y C (articulación esférica y apoyo, respectivamente).
0
• A partir de la reducción cinemática v21
,ω
21 .
(b) Empleando los métodos de la Dinámica Vectorial, obtenga las ecuaciones diferenciales de movimiento en forma de
integrales primeras. Calcule ψ(t) y φ(t).
(c) Aplicando el teorema del momento cinético en el punto O, deduzca la expresión de la fuerza normal que ejerce el
plano O1 X1 Y1 en el punto C, en función de ω y Ω. Calcule el valor de ωo de ω que anula la normal entre disco y
plano. Si se decide eliminar el vı́nculo disco-plano, el sólido empezará a nutar -subida y bajada del eje OG-, ¿en qué
condiciones permanecerá OG moviéndose horizontalmente?.
(d) Supuesto final: θ libre (3 grados de libertad: nutación, precesión, rotación propia).– Elimine del problema el plano
material z1 = 0 y obtenga las ecuaciones de movimiento del sólido (Sólido en 3D con un punto fijo) en forma de
integrales primeras.
16. El sistema de la figura está formado por un par de sólidos de igual masa m cuyo trabajo de contacto interno y otros aspectos
van a ser estudiados ahora. El sólido “0” es homogéneo y el “‘2” es puntual.
(a) Supuesto 1 : el contacto 2 − 0 es rugoso con coeficiente de rozamiento dinámico μ. Demuestre que
roz
P
P
20
Pint (2, 0) = F20
· v20
= −μN ṡ ≤ 0 N ≡| N
| .
(b) Supuesto 2 : el contacto 2 − 0 es liso. Demuestre que Pint (2, 0) = 0 .
En el instante inicial el sistema está en reposo con {x(0) = b ; s(0) = 0} . Obtenga las ecuaciones diferenciales
de movimiento en forma de integrales primeras. Calcule {ẍ ; s̈}, el tiempo t que tarda P en recorrer BC, y el valor
de b para que en ese instante AB esté en O1 Y1 . Suponga que el contacto 0 − 1 es liso.
(c) Supuesto 3 : Cambie el bloque “2” por un ARO (sólido “2”) de radio R, masa m, que gracias al contacto rugoso
2 − 0 , rueda sin deslizar – respecto a “0” – en su punto de contacto I. Tenga en cuenta que se cumplirá la relación
roz
I
· v20
y evalúela.
Pint (2, 0) = F20
En el instante inicial el sistema está en reposo con {x(0) = b ; s(0) = 0} . Obtenga las ecuaciones diferenciales
de movimiento en forma de integrales primeras. Calcule {ẍ ; s̈}, el tiempo t que tarda P en recorrer BC, y el valor
de b para que en ese instante AB esté en O1 Y1 . Suponga que el contacto 0 − 1 es liso.
Problema 16
Problema 17
17. En el sistema mecánico de la figura, la lámina Π de masa despreciable y dispuesta horizontalmente (sólido “0”), puede girar
libremente alrededor del eje vertical OZ1 de un sistema de referencia fijo OX1 Y1 Z1 (sólido “1”). Un disco homogéneo
de masa m, centro C, radio R y espesor despreciable (sólido “2”), rueda sin deslizar sobre el eje OX0 ligado a la lámina
Π. El disco se halla en todo instante contenido en el plano vertical OX0 Z0 perpendicular a dicha lámina y rı́gidamente
unido a ella, verificándose en todo instante que OZ0 ≡ OZ1 . Además, un resorte de longitud natural nula y constante
recuperadora k conecta el centro del disco, C, con el punto fijo A del eje vertical OZ1 , situado a una altura R sobre O.
5
Ampliación de Fı́sica (MECÁNICA), Curso 11/12 (Ing. Industriales)
Boletı́n de problemas 2
(a) Desvincule el sistema de sólidos rı́gidos descrito, discutiendo razonadamente el número de grados de libertad, ası́
como el número total de incógnitas que presenta el mecanismo bajo estudio.
(b) Obtenga las integrales primeras del movimiento del sistema, deduciéndolas a partir de leyes de conservación.
Un rotor es cualquier sólido rı́gido que gira alrededor de un eje fijo CD. Se dice que el rotor está totalmente equilibrado
−−→
si en todos los puntos del eje se cumple L
ω CD. Para que esto ocurra, el eje AB ha de ser baricentral y principal
de inercia. Si falla cualquiera de las dos condiciones, el rotor estará desequilibrado, aumentarán las acciones vinculares en
los apoyos C y D, y aparecerán vibraciones, que serán perjudiciales o beneficiosas según el problema: perjudiciales por
ejemplo para la rueda de un coche, o beneficiosas si se da el caso de que queremos diseñar una máquina vibradora.
18. ROTOR DESEQUILIBRADO ESTÁTICAMENTE G ∈/ al eje de giro .
El mecanismo de la figura, sólido “0”, representa un rotor en forma de cruz –barras AB y CD unidas perpendicularmente por sus puntos medios en O– cuya barra AB es solidaria al eje OZ1 . La barra CD gira libremente y en sus extremos
C y D se encuentran dos masas de valores M y m respectivamente. Suponga que el contacto A es una articulación esférica
y que el de B es un apoyo sobre el eje OZ1 , siendo lisos todos los contactos materiales. El sistema está recibiendo un
para motor en O de valor τ = τ (t)k1 . Obtenga el valor de las fuerzas vinculares y la ecuación diferencial de movimiento.
Imponga las condiciones necesarias –minimización de fuerzas en los contactos– para el equilibrado del sistema.
Problema 18
Problema 19
/ al eje de giro .
19. ROTOR DESEQUILIBRADO DINÁMICAMENTE L
El mecanismo de la figura, sólido “0”, representa un rotor en forma de X –barras AB y CD formando un ángulo
fijo β = π/2 − α y unidas por sus puntos medios en O– cuya barra AB es solidaria al eje OZ1 . La barra CD gira
libremente y en sus extremos C y D se encuentran dos masas idénticas de valor m cada una. Suponga que el contacto
A es una articulación esférica y que el de B es un apoyo sobre el eje OZ1 , siendo lisos todos los contactos materiales.
El sistema está recibiendo un para motor en O de valor τ = τ (t)k1 . Obtenga el valor de las fuerzas vinculares y la
ecuación diferencial de movimiento. Imponga las condiciones necesarias –minimización de fuerzas en los contactos– para
el equilibrado del sistema.
20. Una varilla OA (sólido “0”), de masa despreciable y longitud l (l = 2a), puede girar en un plano horizontal alrededor
de su punto O situado en el eje vertical O1 Z1 a una distancia l del origen del sistema O1 X1 Y1 Z1 . En el otro extremo se
articula otra varilla AB (sólido “2”) de masa m y longitud l, que puede girar alrededor del punto A, estando obligada a
permanecer en todo momento en el plano O0 X0 Z0 . Utilice las coordenadas y los sistemas de ejes propuestos en la figura,
suponga que los vı́nculos son ideales, y trabaje con los métodos de la Dinámica Vectorial.
1. Desvicule:
a. El sólido “2” del sólido “0”.
b. El sólido “0” del sólido “1”.
los momentos cinéticos L
G , L
O , y las energı́as cinética T y potencial V
2. Calcule la cantidad de movimiento C,
del sistema mecánico.
3. Razone la existencia de integrales primeras y obtenga sus correspondientes ecuaciones diferenciales de movimiento.
6
Ampliación de Fı́sica (MECÁNICA), Curso 11/12 (Ing. Industriales)
Problema 20
7
Boletı́n de problemas 2