Análisis de mecanismos - Universidad Politécnica de Baja
Anuncio

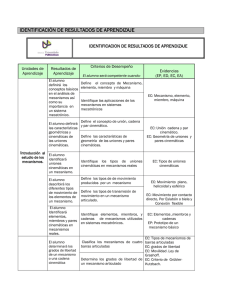
MANUAL DE LA ASIGNATURA MTMT-SUPSUP-XXX REV00 INGENIERÍA MECATRÓNICA ANÁLISIS DE MECANISMOS F-RPRP-CUPCUP-17/REV:00 DIRECTORIO Dr. Reyes Tamez Guerra Secretario de Educación Pública Dr. Julio Rubio Oca Subsecretario de Educación Superior e Investigación Científica Dr. Enrique Fernández Fassnachtt Coordinador de Universidades Politécnicas Francisco Javier Luna Beltrán Secretario de Educación y Cultura del Estado De Sinaloa Dr. Antonio González González Rector de la Universidad Universidad Politécnica de Sinaloa 1 PAGINA LEGAL Carlos Orozco García (UPSIN) Víctor Manuel Rodríguez Velázquez(UPSIN) Juan Martín Albarran Jiménez (UPVM) José Manuel Robles Solis (UPZ) Fabio Fernández Ramírez (UPCH) Primera Edición: 200_ DR 2005 Secretaría de Educación Pública México, D.F. ISBN----------------- 2 ÍNDICE Introducción............................................................................. 4 Ficha Técnica............................................................................. 5 Identificación de resultados de aprendizaje ....................... 7 Planeación del aprendizaje........................................................ 11 Desarrollo de prácticas.......................................................... 20 Instrumentos de Evaluación Diagnóstica.……………………………………………………………………… Formativa.………………………………………………………………………… Sumativa.…………………………………………………………………………. 25 Glosario....................................................................................... Bibliografía ................................................................................. 67 73 3 INTRODUCCIÓN La asignatura de Análisis de Mecanismos es fundamental en Ingeniería, por ser la asignatura en la que se plantean los problemas cinemáticos y dinámicos de la construcción de máquinas. Su contenido tiene que ser acorde con los objetivos descritos y por otra, deberá estar enlazado con las correspondientes asignaturas de la especialidad. Para el estudio de la asignatura de Análisis de Mecanismos, es necesario el manejo de la Mecánica teórica, la cinemática y dinámica del cuerpo rígido, tanto en el plano como en el espacio y el estudio de análisis vectorial y de los correspondientes principios vectoriales y analíticos. Con los conocimientos de esta asignatura, el alumno podrá realizar el análisis cinético y síntesis cinemática de mecanismos requeridos en sistemas mecatrónicos, por lo que es base para a asignaturas posteriores tales como: Robótica, Diseño Mecánico y Diseño Mecatrónico, y contribuye al perfil de egreso dentro de la función de diseño e implementación de sistemas mecánicos de maquinaria y equipos 4 FICHA TÉCNICA FICHA TÉCNICA ANÁLISIS DE MECANISMOS Nombre: Análisis de Mecanismos Clave: Justificación: Objetivo: Pre requisitos: • • Esta asignatura se desarrollan los conocimientos y habilidades para el análisis cinemático y cinético de máquinas y mecanismos que se requieren en la función de Diseño e Implementación de Sistemas Mecánicos de maquinaria e instalaciones. Además, es una asignatura previa de materias como Diseño de Máquinas, Robótica I y II, Diseño Mecatrónico I y II, entre otras. Desarrollar la capacidad el alumno para el análisis cinemático y cinético de mecanismos que integran una máquina. - Estática - Dinámica -Algebra vectorial Capacidades Diseñar mecanismos considerando los requerimientos de movimiento( desplazamiento, velocidad y aceleración) Analizar los mecanismos de forma cinemática UNIDADES DE APRENDIZAJE INTRODUCCIÓN AL ESTUDIO DE LOS MECANISMOS. ANÁLISIS CINEMÁTICO DE MECANISMOS. Estimación de tiempo (horas) necesario para el aprendizaje al ANÁLISIS CINÉTICO DE MECANISMOS. alumno, por Unidad de Aprendizaje: SÍNTESIS VECTORIAL DE LEVAS ENGRANAJES TRENES DE ENGRANAJES Total de horas por cuatrimestre: Total de horas por semana: Créditos: TEORÍA PRÁCTICA presencial No presencial presencial No presencial 8 2 5 0 7 2 6 1 7 1 5 2 7 1 7 1 1 6 1 6 2 4 1 42 9 33 6 7 90 6 6 5 1. Erdman, Arthur G., "Diseño de mecanismos, análisis y síntesis", Mexico Edit. Prentice Hall cop. 1998 2. Dijksman, E.A., "Cinemática de mecanismos", mecanismos" Mexico , Editorial Limusa. 3. Hall, A. S.,””Diseño de máquinas. Teoría y problemas” problemas”. Editorial Mc Graw-Hill. Bibliografía: 4. Mabie, Hamilton H., "Mecanismos y dinámica de maquinaria ", México Editorial. Limusa . 5. Norton, Robert L.,"Diseño "Diseño de maquinaria, una introducción a la síntesis y al análisis de mecanismos y Máquinas ",Editorial McGraw-Hill . 6. Shigley, Joseph Edward., "Teoría Teoría de máquinas y mecanismos mecanismos"", México; Editorial McGraw-Hill . 6 IDENTIFICACIÓN DE RESULTADOS DE APRENDIZAJE IDENTIFICACION DE RESULTADOS DE APRENDIZAJE Unidades de Aprendizaje Resultados de Aprendizaje El alumno definirá los conceptos básicos en el análisis de mecanismos así como su importancia en un sistema mecatrónico. El alumno definirá las características geométricas y cinemáticas de las uniones cinemáticas. Criterios de Desempeño El alumno será competente cuando: Evidencias (EP, ED, EC, EA) Horas Totales Define el concepto de Mecanismo, elemento, miembro y máquina Identifique las aplicaciones de los mecanismos en sistemas mecatrónicos Define el concepto de unión, cadena y par cinemático. Define las características de geometría de las uniones y pares cinemáticos. EC: Mecanismo, elemento, miembro, máquina 2 EC: Unión cadena y par cinemático. EC: Geometría de uniones y pares cinemáticos 3 EC: Tipos de uniones cinemáticas 3 Introducción al El alumno estudio estudio de los mecanismos. identificará uniones cinemáticas en un mecanismo. El alumno describirá los diferentes tipos de movimiento de los elementos de un mecanismo. El alumno Identificará elementos, miembros y pares cinemáticos en mecanismos reales. El alumno determinará los grados de libertad de un mecanismo o una cadena cinemática Identifique los tipos de uniones cinemáticas en mecanismos reales Define los tipos de de movimiento producidos por un mecanismo Define los tipos de transmisión de movimiento en un mecanismo articulado. Identifique elementos, miembros, y cadenas de mecanismos utilizados en sistemas mecatrónicos. EC: Movimiento plano, helicoidal y esférico 3 EC: Movimiento por contacto directo, Por Eslabón o biela y Conexión flexible EC: Elementos ,miembros y cadenas EP: Prototipo de un mecanismo básico 4 EC: Tipos de mecanismos de Clasifica los mecanismos de cuatro barras articuladas barras articuladas EC: grados de libertad EC: Movilidad .Ley de Determina los grados de libertad de Grashoff. EC: Criterio de Grûblerun mecanismo articulado Kutzbach. 3 7 Unidades de Aprendizaje Análisis cinemático de mecanismos Resultados de Aprendizaje El alumno describirá el movimiento de mecanismos articulados El alumno realizará análisis de posición, velocidad y aceleración en mecanismos planos. El alumno realizará análisis cinemático de mecanismos mediante software. Análisis cinético de mecanismos El alumno realizará un análisis de fuerzas que actúan en mecanismos planos con impedancias mecánicas lineales El alumno determinará los perfiles de pares y/o fuerzas motrices en mecanismos y máquinas El alumno determinará las fuerzas asociadas a mecanismos reales usando herramientas de cómputo Criterios de Desempeño El alumno será competente cuando: Describe el movimiento de mecanismos de cuatro barras articulados en un sistema mecánico. Evidencias (EP, ED, EC, EA) Horas Totales EC: Movimiento de mecanismos de eslabones articulados: -Mecanismo de Watt - Mecanismo de Robert -Mecanismo Biela-Manivela - Mecanismo de Chebyshev - Pantógrafos 3 Realice análisis de posición, velocidad EC: Posición, velocidad y y aceleraciones de un mecanismo aceleración articulado por métodos gráficos y/o analíticos. EC: Método gráfico y analítico Determina los centros instantáneos de rotación de un mecanismo plano Realice análisis de posición, velocidad y aceleración de un mecanismo mediante software. 6 EC: Centro instantáneo de rotación. EC: Posición, velocidad y aceleración EP: Reporte de práctica de acuerdo al formato establecido 4 Define el concepto de impedancia mecánica. Identifique uniones cinemáticas ideales en un mecanismo. Calcule las fuerzas y pares asociados a un mecanismo completo utilizando distintos métodos Calcule las fuerzas asociadas a los eslabones de un mecanismo utilizando herramientas de cómputo. EC: Impedancia mecánica de posición, velocidad y aceleración 5 EC: Fuerzas motrices EC: Principio de los trabajos virtuales EC: Principio de las potencias virtuales 5 EC: Fuerzas en mecanismos planos 5 EP: Reporte de práctica de acuerdo al formato establecido 8 Unidades de Aprendizaje Resultados de Aprendizaje El alumno describirá el funcionamiento y aplicaciones de un mecanismo leva-seguidor Síntesis vectorial de levas El alumno aplicará las metodologías de análisis y diseño de levas. Criterios de Desempeño El alumno será competente cuando: Identifica la nomenclatura de mecanismo de Leva-seguidor. Evidencias (EP, ED, EC, EA) Horas Totales EC: Leva y seguidor EC: Nomenclatura geométrica de un sistema leva- seguidor 4 EC: Tipos de levas y Clasifique los tipos de mecanismos de seguidores leva-seguidor usados en sistemas EC: Nomenclatura de un mecatrónicos. sistema leva seguidor Realice diagramas de desplazamientos para distintos tipos de movimientos de seguidores. Dibuje el perfil de una leva a partir de su diagrama de desplazamiento Realice estudio cinético de levas mediante métodos analíticos EC: Diagramas de desplazamiento y perfil de leva 4 EC: Velocidad y aceleración en levas-seguidor 4 El alumno ED: Mecanismos de leva realizará el perfil seguidor mediante software. de un mecanismo leva-seguidor Dibuje el perfil de una leva mediante mediante software EP: Dibujo de perfil de leva software. mediante software El alumno identificará las partes y tipos de engranes en sistemas mecatrónicos. Engranajes El alumno aplicará las ecuaciones constitutivas de geometría de engranes rectos El alumno realizará el perfil gráfico de un engrane recto. Describe el uso de los engranes en sistemas mecatrónicos 1 3 EC: Engranajes y sus aplicaciones 2 Describe la clasificación de los engranes utilizados en la industria. EC: Tipos de engranajes Describe la ley fundamental del Engranaje e involumetría. EC: Involumetría Calcule las características técnicas de EC: Ecuaciones constitutivas diseño para un engrane recto. de diseño engranes rectos. EC: Relación de engranaje, paso diametral, adendo, Determine el Juego lateral o dedendo, juego. circunferencial (Backlash) del engrane recto 6 Trace el perfil de un par de engranes EP: Perfil de par de engranes rectos. rectos trazado. 2 9 Unidades de Aprendizaje Resultados de Aprendizaje El alumno describirá el uso de los engranes helicoidales, sinfín y cónicos. El alumno aplicará ecuaciones de geometría de u par de engranes, helicoidales, sinfin y cónicos. El alumno describirá los distintos tipos de trenes de engranajes utilizados en sistemas mecatrónicos. Criterios de Desempeño El alumno será competente cuando: Identifique un engranaje helicoidal, sinfín y cónico. Describe el principio de funcionamiento de los engranes helicoidales, sinfín y cónicos. Evidencias (EP, ED, EC, EA) Horas Totales EC: Engranes Helicoidales paralelos y de ejes cruzados. EC: Mecanismo de tornillo sin fin. EC: Teoría de los engranajes cónicos. 2 EC: Ecuaciones constitutivas de diseño engranes. Aplique las ecuaciones constitutivas de geometría de un par de engranes EC: Relación de engranaje, rectos, helicoidales, sin-fin, y cónicos. ángulo de hélice, diámetros externos, ancho de cara. Define el engranaje. concepto de tren 3 de Identifique los tipos de trenes de engranajes usados en sistemas mecatrónicos. EC: Tren de engranajes EC: Tipos de trenes de engranajes 3 EC: Análisis de Trenes de engranajes de ejes paralelos EC: Trenes de engranajes con ejes no paralelos Calcule el valor del tren de engranaje EC: Trenes de engranajes para cambios de velocidades Calcule la razón de velocidades angulares de trenes planetarios. Trenes de engranajess engranaje El alumno analizará la ventaja mecánica de transmisión de un tren de engranajes. Determine la velocidades de salida en reductores de velocidad El alumno analizará trenes de engranaje mediante software. 6 Analice trenes de engranajes mediante ecuaciones constitutivas y/o EC: Métodos de análisis de método tabular trenes reengranajes. Represente gráficamente trenes de engranaje mediante herramienta de cómputo Calcule parámetros de operación de un tren mediante herramienta de cómputo EC: Reductor de velocidad. EC: tren de engranajes 4 EP: Tren de engranaje modelado en computadora. 10 PLANEACIÓN DEL APRENDIZAJE PLANEACIÓN DEL APRENDIZAJE Resultados de aprendizaje El alumno definirá los conceptos básicos en el análisis de mecanismos así como su importancia en un sistema mecatrónico. El alumno definirá las características geométricas y cinemáticas de las uniones cinemáticas. Criterios de desempeño Define el concepto de Mecanismo, elemento miembro y máquina Identifique las aplicaciones de los mecanismos en sistemas mecatrónicos Define el concepto de unión, cadena y par cinemático. Define las características de geometría de las uniones y pares cinemáticas. Espacio educativo Evidencias (EC, EP, ED, EA) Instrumento de evaluación EC: Mecanismo, máquina, Cuestionario elemento , miembro y máquina EC: Unión, cadena y par cinemático. EC: Geometría de uniones y pares cinemáticos Técnicas de aprendizaje Investigaciones y demostraciones Total de Horas Teórica Aula x Lab Otro Práctica HP HNP P NP 8 2 5 0 x Discusión dirigida Exposición Cuestionario Lista de cotejo Taller y práctica mediante la acción x 0 11 El alumno identificará uniones cinemáticas en un mecanismo. de los elementos de un mecanismo. El alumno describirá los diferentes tipos de movimiento El alumno identificará elementos, miembros y pares cinemáticos en mecanismos reales. El alumno determinará los grados de libertad de un mecanismo o una cadena cinemática Identifique los tipos de uniones cinemáticas en mecanismos reales EC: Tipos de uniones cinemáticas Define los tipos de de movimiento producidos por un mecanismo EC: Movimiento plano, helicoidal y esférico Define los tipos de transmisión de movimiento en un mecanismo articulado EC: Movimiento por contacto directo, Por Eslabón o biela y Conexión flexible Identifique elementos, miembros, y cadenas de mecanismos utilizados en sistemas mecatrónicos. Investigaciones y EC: Elementos demostraciones ,miembros y Cuestionario cadenas Lista de cotejo EP: Prototipo de Taller y práctica un mecanismo mediante la acción x EC: Tipos de mecanismos de barras articuladas EC: grados de libertad Cuestionario EC: Movilidad .Ley de Grashoff. EC: Criterio de GrûblerKutzbach. x Clasifica los mecanismos de cuatro barras articuladas Determina los grados de libertad de un mecanismo Articulado. Cuestionario Taller y práctica mediante la acción x Exposición Cuestionario Lectura comentada x x Exposición Resolución de situaciones problemáticas 7 2 6 1 12 El alumno describirá el movimiento de mecanismos articulados El alumno realizará análisis de posición, velocidad y aceleración en mecanismos planos. El alumno realizará análisis cinemático de mecanismos mediante software. Describe el movimiento de mecanismos de cuatro barras articulados en un sistema mecánico Realice análisis de posición, velocidad y aceleraciones de un mecanismo articulado por métodos gráficos y/o analíticos.. Realice análisis de posición, velocidad y aceleración de un mecanismo mediante software. EC: Movimiento de mecanismos de eslabones articulados: -Mecanismo de Watt - Mecanismo de Robert -Mecanismo Biela-Manivela - Mecanismo de Chebyshev - Pantógrafos Cuestionario EC: Posición, velocidad y aceleración Exposición Exposición Cuestionario EC: Método gráfico y analítico EC: Posición, velocidad y aceleración EP: Reporte de práctica de acuerdo al formato establecido x x Resolución de situaciones problemáticas Taller y práctica Lista de cotejo mediante la acción x x 13 Resultados de aprendizaje El alumno realizará un análisis de fuerzas que actúan en mecanismos planos con impedancias mecánicas lineales. Criterios de desempeño Define el concepto de impedancia mecánica Espacio educativo Evidencias (EC, EP, ED, EA) EC: Impedancia mecánica de posición, velocidad y aceleración Instrumento de evaluación Cuestionario Técnicas de aprendizaje Exposición Total de Horas Teórica Aula Lab Otro Práctica HNP HP NP P x Identifique uniones cinemáticas ideales en un mecanismo. El alumno determinará los perfiles de pares y/o fuerzas motrices en mecanismos y máquinas. Calcule las fuerzas asociadas a un mecanismo completo utilizando distintos métodos El alumno determinará las fuerzas asociadas a mecanismos reales usando herramientas de cómputo. Calcule las fuerzas asociadas a los eslabones de un mecanismo utilizando herramientas de cómputo. EC: Fuerzas motrices EC: Principio de los trabajos virtuales EC: Principio de las potencias virtuales Exposición Cuestionario EC: Fuerzas en mecanismos planos. EP: Reporte de práctica de acuerdo al formato establecido Resolución de situaciones problemáticas 7 x 1 5 2 Exposición Lista de cotejo Taller y práctica mediante la acción x x 14 Resultados de aprendizaje El alumno describirá el funcionamiento y aplicación de un mecanismo leva-seguidor. Criterios de desempeño Identifica la nomenclatura de mecanismo Leva-seguidor. Clasifique los tipos de mecanismos de levaseguidor usados en sistemas mecatrónicos. Espacio educativo Evidencias (EC, EP, ED, EA) Instrumento de evaluación Técnicas de aprendizaje Total de Horas Teórica Aula Lab Otro Práctica HP HNP P NP 7 1 7 1 EC: Leva y seguidor EC: Nomenclatura geométrica de un sistema levaseguidor Cuestionario Investigaciones y demostraciones x x EC: Tipos de levas y seguidores Realice diagramas de desplazamiento para distintos tipos de EC: Diagrama movimientos de seguidores. de desplazamiento y perfil de leva El alumno aplicará las metodologías de análisis y diseño de levas. Dibuje el perfil de una leva a partir de su diagrama de Exposición Cuestionario Resolución de situaciones problemáticas x desplazamiento Realice estudio cinético de levas mediante métodos analíticos EC: Velocidad y aceleración en levas-seguidor 15 Resultados de aprendizaje El alumno realizará el perfil de un mecanismo leva-seguidor mediante software. Criterios de desempeño Dibuje el perfil de una leva mediante software Describe el uso de los engranes en sistemas mecatrónicos. El alumno identificará las partes y tipos de engranes en Describe la sistemas clasificación mecatrónicos. de los engranes utilizados en la industria. Describe la ley fundamental del Engranaje e involumetría. Calcule las El alumno características aplicará las técnicas de ecuaciones constitutivas de diseño para un engrane recto. geometría de engranes rectos Determine el Juego lateral o circunferencial (Backlash) del engrane recto Espacio educativo Evidencias (EC, EP, ED, EA) Instrumento de evaluación ED: Mecanismos de leva-Seguidor mediante software. Cuestionario EP: Dibujo de Lista de cotejo perfil de leva mediante software EC: Engranajes y sus aplicaciones. Técnicas de aprendizaje Total de Horas Teórica Aula Lab x x Otro Práctica HP HNP P NP 7 1 6 1 Exposición Taller y práctica mediante la acción. Exposición Cuestionario Investigaciones y demostraciones x x EC: Tipos de engranajes EC: Involumetría EC: Ecuaciones constitutivas de diseño engranes rectos. Exposición Cuestionario Resolución de situaciones problemáticas x EC: Relación de engranaje, paso diametral, adendo, dedendo, juego. 16 Resultados de aprendizaje Criterios de desempeño El alumno Trace el perfil realizará el perfil de un par de gráfico de un engranes engrane recto. rectos. El alumno describirá el uso de los engranes helicoidales, sinfín y cónicos. El alumno aplicará ecuaciones de geometría de u par de engranes, helicoidales, sinfin y cónico Espacio educativo Evidencias (EC, EP, ED, EA) Instrumento de evaluación Total de Horas Teórica Aula Lab x x Otro HP HNP Práctica P NP Exposición EP: Perfil de par de engranes rectos trazado. Lista de cotejo Identifique un engranaje helicoidal, EC: Engranes sinfín y cónico. Helicoidales . paralelos y de ejes cruzados . Describe el EC: Mecanismo principio de de tornillo sin fin funcionamient EC: Teoría de los o de los engranajes engranes cónicos. Cuestionario helicoidales, sinfín y cónicos. Aplique las ecuaciones constitutivas de geometría de un par de engranes rectos, helicoidales, sin-fin, y cónicos Técnicas de aprendizaje Aplique las ecuaciones constitutivas de geometría de un par de engranes rectos, helicoidales, sinfin, y cónicos. Taller y práctica mediante la acción. Exposición Visitas Exposición x x x 17 El alumno describirá los distintos tipos de trenes de engranajes utilizados en sistemas mecatrónicos. Define el concepto de tren de engranaje EC: Tren de engranajes. Identifique los tipos de trenes de engranajes usados en sistemas mecatrónicos EC: Tipos de trenes de engranajes. Visitas x Cuestionario x Investigaciones y demostraciones EC: Análisis de Trenes de engranajes de ejes paralelos Calcule la razón de velocidades angulares de trenes planetarios. El alumno analizará la ventaja mecánica de transmisión de un tren de engranajes. EC: Trenes de engranajes con ejes no paralelos EC: Trenes de engranajes para cambios de velocidades. Calcule el valor del tren de engranaje. 6 2 4 1 Exposición Cuestionario Lista de cotejo Resolución de situaciones problemáticas x EC: Métodos de análisis de Analice trenes trenes de de engranajes engranajes. mediante EC: Reductor de ecuaciones velocidad. constitutivas y/o método tabular. 18 Determine las velocidades de salida en reductores de velocidad. El alumno analizará trenes de engranaje mediante software. Represente gráficamente trenes de engranaje mediante herramienta de cómputo. Exposición EC: tren de engranajes EP: Tren de engranaje Calcule modelado en parámetros de computadora. operación de un tren mediante herramienta de cómputo. Lista de cotejo Taller y práctica mediante la acción. x x 19 DESARROLLO DE PRÁCTICA DESARROLLO DE PRACTICA Fecha: Nombre de la asignatura: Nombre: Análisis de Mecanismos Análisis cinemático de mecanismos planos 1 Número : Duración (horas) : 2 Resultado de aprendizaje: El alumno realizará análisis cinemático de mecanismos mediante software. Justificación La presente práctica pretende reforzar y complementar los conocimientos teóricos adquiridos en lo referente al estudio de la cinemática de cualquier mecanismo plano, utilizado en un sistema mecatrónico, haciendo uso de una herramienta computacional. Sector o subsector para el desarrollo de la práctica: Centro de Cómputo Actividades a desarrollar: -Familiarizarse con el software de aplicación ( comandos básicos) -Realizar cálculo de posiciones, velocidades y aceleraciones de los diferentes elementos que componen un mecanismo específico. Evidencia a generar en el desarrollo de la práctica: EC: Posición, velocidad y aceleración EP: Reporte de práctica de acuerdo al formato establecido 20 DESARROLLO DE PRACTICA Fecha: Nombre de la asignatura: Nombre: Análisis de Mecanismos Análisis cinético de mecanismos planos Número : Resultado de aprendizaje: Justificación 2 Duración (horas) : 3 El alumno determinará las fuerzas asociadas a un mecanismo usando herramientas de cómputo. La presente práctica pretende reforzar y complementar los conocimientos teóricos adquiridos en lo referente al estudio de la cinética de cualquier mecanismo utilizado en un sistema mecatrónico, haciendo uso de una herramienta computacional. Sector o subsector para el desarrollo de la práctica: Centro de Cómputo Actividades a desarrollar: -Familiarizarse con el software de aplicación ( comandos básicos) -Realizar cálculo fuerzas asociadas a mecanismos planos propuestos. Evidencia a generar en el desarrollo de la práctica: EC: Fuerzas en mecanismos EP: Reporte de práctica de acuerdo al formato establecido 22 DESARROLLO DE PRACTICA Fecha: Nombre de la asignatura: Nombre: Análisis de Mecanismos Mecanismo leva-seguidor Número : 3 Duración (horas) : 3 Resultado de aprendizaje: El alumno realizará el perfil de un mecanismo seguidor mediante software. Justificación La presente práctica pretende reforzar y complementar los conocimientos teóricos adquiridos en lo referente a la síntesis de un mecanismo leva-seguidor, haciendo uso de una herramienta computacional. leva- Sector o subsector para el desarrollo de la práctica: Centro de Cómputo Actividades a desarrollar: -Familiarizarse con el software de aplicación ( comandos básicos) -Realizar síntesis de un mecanismo leva-seguidor. -Dibujar el perfil de una leva Evidencia a generar en el desarrollo de la práctica: ED: Representación de Mecanismo de leva-seguidor con el software EP: Dibujo de perfil de leva 23 DESARROLLO DE PRACTICA Fecha: Nombre de la asignatura: Análisis de Mecanismos Nombre: Trenes de engranajes Número : 4 Duración (horas) : 2 Resultado de aprendizaje: El alumno analizará trenes de engranaje mediante software Justificación La presente práctica pretende reforzar y complementar los conocimientos teóricos adquiridos en lo referente al análisis y representación de trenes de engranajes presentes en un sistema mecatrónico, haciendo uso de una herramienta computacional. Sector o subsector para el desarrollo de la práctica: Centro de Cómputo Actividades a desarrollar: -Familiarizarse con el software de aplicación ( comandos básicos) -Realizar representación gráfica de un tren de engranaje propuesto. -Determinar los parámetros de operación de un tren de engranajes. Evidencia a generar en el desarrollo de la práctica: EC: tren de engranajes EP: Tren de engranaje modelado en computadora 24 GUÍA DE EVALUACIÓN Análisis de Mecanismos 2005 Versión : 1.0 25 INTRODUCCÍON A LOS MECANISMOS (XXXXXXXXXXX) CUESTIONARIO DATOS GENERALES DEL PROCESO DE EVALUACIÓN NOMBRE DEL ALUMNO MATRICULA: FECHA: ANÁLISIS DE MECANISMOS. CUARTO CUATRIMESTRE XXXXXXXXX NOMBRE DEL EVALUADOR INSTRUCCIONES Estimado usuario: • Usted tiene en las manos un instrumento de evaluación que permitirá fundamentar las actividades que ha demostrado a través de su desempeño o en la entrega de sus productos. • Conteste los siguientes planteamientos de manera clara. • Le recordamos tomar el tiempo necesario para contestar y desarrollar su contenido. CÓDIGO ASPECTO Es un sistema concebido para realizar una tarea determinada que comporta la presencia de fuerzas de fuerzas y movimientos y, en principio la realización de trabajo. A) Mecanismo B) Máquina C) Elemento CUMPLE : SI NO Es una combinación de cuerpos rígidos formados de tal manera y conectados de tal forma que se mueven uno con otro con un movimiento relativo. A) Mecanismo B) Máquina C) Elemento CUMPLE : SI NO Es toda entidad constitutiva de una máquina o mecanismo que se considera una unidad. A) Elemento B) Miembro D) Cadena cinemática 26 CUMPLE : SI NO Elemento material de una máquina y mecanismo que puede ser sólido rígido, sólido flexible o fluido. A) Elemento B) Miembro C) Cadena cinemática CUMPLE : SI NO Es un conjunto o subconjunto de miembros de un mecanismo enlazados entre sí. A) Par cinemático B) Cadena cinemática C) Máquina CUMPLE : SI NO Es una enlace entre dos miembros causado por el contacto directo entre ellos, que debe ser puntual según una recta o según una superficie. A) Par cinemático B) Cadena cinemática D) Máquina CUMPLE : SI NO CUMPLE : SI NO A los miembros de una cadena cinemática se le denomina A) Par cinemático B) Eslabones E) Elementos Tipo de movimiento producido por un mecanismo, en el que un cuerpo rígido se mueve en tal forma que la posición de cada línea del cuerpo es paralela a todas sus otras posiciones. A) Movimiento de traslación B) Movimiento de Rotación C) Movimiento de Helicoidal CUMPLE : SI NO 27 Coloque en el paréntesis con la letra que corresponde a la figura mostrada: A) ( ) Par prismático ( ) Cadena cinemática B) ( ) Par esférico ( ) Par de revolución C) ( ) Par plano D) CUMPLE : SI NO 28 En los mecanismos representados en las figuras adjuntas: a) Identificar los elementos, articulaciones, miembros y pares cinemáticos b Hacer un esquema de símbolos acompañado de los parámetros necesarios para el estudio cinemático. A) B) C) D) CUMPLE : SI NO 29 CUMPLE : Firma del Alumno SI NO Firma del Evaluador 30 CINEMÁTICA DE MECANISMOS PLANOS (XXXXXXXXXXX) CUESTIONARIO DATOS GENERALES DEL PROCESO DE EVALUACIÓN NOMBRE DEL ALUMNO MATRICULA: FECHA: XXXXXXXXX ANÁLISIS DE MECANISMOS. CUARTO CUATRIMESTRE NOMBRE DEL EVALUADOR INSTRUCCIONES Estimado usuario: • Usted tiene en las manos un instrumento de evaluación que permitirá fundamentar las actividades que ha demostrado a través de su desempeño o en la entrega de sus productos. • Conteste los siguientes planteamientos de manera clara. • Le recordamos tomar el tiempo necesario para contestar y desarrollar su contenido. CÓDIGO ASPECTO Coloque en el paréntesis la letra que corresponde al mecanismo mostrado: D) C) B) A) E) ( ) Mecanismo de Grashoff ( ) Mecanismo de línea Recta de Chebyshev ( ) Mecanismo de línea recta de Watt ( ) Mecanismo BielaManivela ( ( ) Mecanismo de línea recta de Hoekens ) Pantógrafo CUMPLE : SI NO 31 Número de parámetros o mediciones independientes que se requieren par definir de manera única la posición de un sistema mecánico en el espacio en cualquier instante de tiempo. A) Coordenadas polares B) Grados de libertad C) Síntesis de número NO Relación que predice el comportamiento de rotación o rotabilidad de las inversiones de un mecanismos de 4 barras basado solo en las longitudes de los eslabones A) Teorema de Grashof B) Teorema de Chebyshev. C) Teorema de Kennedy CUMPLE : SI NO Cuando en un mecanismo de 4 barras articuladas, el eslabón mas corto es el fijo, el mecanismo se denomina: A) Doble manivela B) Doble balancín C) Balancín de manivela CUMPLE : SI NO 32 En el mecanismo de pantógrafo de la figura a. Determinar el no. de grados de libertad, b. Relacionar las coordenadas de P con el desplazamiento ρ1 de la barra horizontal y ρ2 de la barra vertical CUMPLE : SI NO La lámpara de la figura puede girar alrededor del eje vertical Y-Y´ y el plano de la pantalla coincide con el plano de las barras articuladas. a. Determinar el número de grados de libertad. b. Definir tres rotaciones que permitan situar el punto P. CUMPLE : SI NO 33 Determine la movilidad de los mecanismos mostrados en la siguientes figuras CUMPLE : SI NO Determine la movilidad y la condición de Grashof del compartimiento de equipajes elevado de avión mostrado en la figura. CUMPLE : Firma del Alumno SI NO Firma del Evaluador 34 POSICIÓN, VELOCIDAD Y ACELERACIÓN DE MECANISMOS(XXXXXXXXXXX) CUESTIONARIO DATOS GENERALES DEL PROCESO DE EVALUACIÓN NOMBRE DEL ALUMNO MATRICULA: FECHA: ANÁLISIS DE MECANISMOS. CUARTO CUATRIMESTRE XXXXXXXXX NOMBRE DEL EVALUADOR INSTRUCCIONES Estimado usuario: • Usted tiene en las manos un instrumento de evaluación que permitirá fundamentar las actividades que ha demostrado a través de su desempeño o en la entrega de sus productos. • Conteste los siguientes planteamientos de manera clara. • Le recordamos tomar el tiempo necesario para contestar y desarrollar su contenido. CÓDIGO ASPECTO Es un punto alrededor del cual se puede considerar que un cuerpo gira con relación al otro cuerpo en un instante dado: A) Punto de equilibrio B) Centro de gravedad C) Centro Instantáneo de rotación CUMPLE : SI NO Establece que para tres cuerpos independientes en movimiento plano general, los tres centros instantáneos se encuentran en una línea recta común. A) Teorema de Grashof B) Teorema de Chebyshev. C) Teorema de Kennedy CUMPLE : SI NO En el mecanismo de cuatro barras mostrado en la figura, el eslabón 2 debe girar completamente y el 4 oscilar dentro de un ángulo de 75º.El eslabón 4 debe tener 11.4cm de longitud, y cuando esté en una posición extrema, la distancia O2B debe ser 10.2 cm y en la otra posición extrema debe ser 22.9 cm. Determinar la longitud de los eslabones 2 y 3 y dibujar el mecanismo a escala a manera de comprobación. Determinar los ángulos máximo y mínimo de transmisión. 35 CUMPLE : SI NO La figura siguiente muestra un mecanismo de retorno rápido. Calcule las velocidades de los puntos A, B, C y D y la velocidad de deslizamiento en la posición mostrada. Considere ω 2 = 10rad / s CUMPLE : SI NO 36 La siguiente figura representa una mesa elevadora accionada por un cilindro hidráulico compuesto por las barras 7 y 8. Su diseño, al ser las barras 2 y 3 exactamente iguales, hace que la plataforma 4 permanezca siempre horizontal. Para l a configuración mostrada en la figura, determine: a. La velocidad angular de la barra 2(ω2) b. Velocidad lineal de la plataforma 4. c. Aceleración angular de la barra 2(α2) d. Aceleración lineal de la plataforma 4 Datos cinemáticos: La velocidad relativa entre las barras 7 y 8 tiene un módulo de 1m/s, constante, y con sentido de alejamiento entre los puntos A y O8 CUMPLE : SI NO Para el mecanismo que se encuentra, encuentre las velocidades y aceleraciones de los pivotes A y B y las velocidades de los centros instantáneos I1,3 e I2,4, así como las velocidades angulares ω3 y ω4, y las aceleraciones angulares α3 y α4. Dibuje el mecanismo a escala y muestre los vectores de velocidad en cada pivote y en otro mecanismo, también a escala, muestre las aceleraciones. Asuma los siguientes datos: r1 = 4, r2 = 6, r3 = 10, r4 = 7, θ2 = 88◦, ω2 = −80, α2 = 30, RPA = 10 y δ3 = 330◦. CUMPLE : SI NO 37 Calcule los centros instantáneos de rotación del mecanismo de la figura sabiendo que entre al barra fija y la 4 existe un par de rodadura sin deslizamiento en el punto D. CUMPLE : SI NO Dado el mecanismo de la figura se pide dibujar en esta misma página los centros instantáneos de rotación de las distintas barras del mecanismo, salvo I46 CUMPLE: SI NO Encuentre todos los centros instantáneos del mecanismo manivela corredera mostrado en la figura. CUMPLE : Firma del Alumno SI NO Firma del Evaluador 38 ANÁLISIS DE FUERZAS EN MECANISMOS (XXXXXXXXXXX) CUESTIONARIO DATOS GENERALES DEL PROCESO DE EVALUACIÓN NOMBRE DEL ALUMNO MATRICULA: FECHA: ANÁLISIS DE MECANISMOS. CUARTO CUATRIMESTRE XXXXXXXXX NOMBRE DEL EVALUADOR INSTRUCCIONES Estimado usuario: • Usted tiene en las manos un instrumento de evaluación que permitirá fundamentar las actividades que ha demostrado a través de su desempeño o en la entrega de sus productos. • Conteste los siguientes planteamientos de manera clara. • Le recordamos tomar el tiempo necesario para contestar y desarrollar su contenido. CÓDIGO ASPECTO Es una medida de cuanto una estructura resiste al movimiento cuando se le aplica una fuerza y es el recíproco de la movilidad. A) Resistencia mecánica B) Impedancia mecánica C) Inercia CUMPLE SI NO Método utilizado para determinar las fuerzas y pares de torsión externos que producen trabajo en un mecanismo. A) Ecuación de curva de acoplador B) Método del Trabajo virtual C) Ecuación de Chebyshev CUMPLE SI NO La figura siguiente muestra un mecanismo de cuatro barras y sus dimensiones en metros. La manivela y el balancín de acero tienen secciones transversales uniformes de 50 mm. de diámetro. En la posición instantánea mostrada, la manivela O2A tiene ω = −10rad / s y α = 10rad / s 2 En P hay una fuerza horizontal F= 300N. Encuentre todas las fuerzas en los pasadores y el par de torsión para impulsar la manivela en este instante. 39 CUMPLE : SI NO 40 La figura adjunta representa una punzónadora para cuero .Se le pide: Calcular la fuerza de punzonamiento f 65 que para esa posición se está ejerciendo sobre el cuero. Datos geométricos: a = 2cm, b = 4cm, c = 2cm, e = 12cm, g = 4cm El cuero es una barra más (barra 6) y que está unida mediante un par tipo leva a la garra y punzón de la punzonadora8 barra 4 y 5 respectivamente). Datos dinámicos: Se ejercen dos fuerzas F=100 N sobre sus brazos tal como se indica en la figura. El peso de las barras es despreciable frente al resto de las fuerzas que intervienen en le sistema mecánico. CUMPLE : SI NO 41 El mecanismo de la figura corresponde al tren de aterrizaje de una avioneta el cual se repliega al aplicar sobre la barra 2 un momento alrededor del eje que pasa por O2. Se pide: a) Para la posición que se indica en la figura, calcular el valor de T necesario que se debe aplicar al elevar la rueda. Utilícese el planteamiento de Newton b) Calcular la fuerza cortante que debe aguantar el pasador situado en O2. Datos másicos e inerciales: m2=m3=0. Conjunto formado por la barra 4 y la rueda m4=50Kg, con centro de gravedad en G. Datos geométricos: El punto B se encuentra sobre la vertical de O2. O4 B = 80cm, O2 A = 50cm, AB = 50 cm y BG = 20 cm CUMPLE : SI NO 42 La mitad de la carga W=4kN de la pala excavadora que muestra la figura está soportada de la barra ACG y por el cilindro hidráulico BC. Determinar la fuerza que dicho cilindro debe ejercer sobre el mecanismo si se quiere que este se encuentre en equilibrio estático para la configuración mostrada en la figura. Si se pide resolver el problema mediante los siguientes métodos. a) Leyes de newton b) Principio de los trabajos virtuales c) Principio de las potencias virtuales Datos geométricos: Los puntos A, C y G están alineados. 43 CUMPLE : Firma del Alumno SI NO Firma del Evaluador MECANISMO LEVA-SEGUIDOR (XXXXXXXXXXX) CUESTIONARIO 44 DATOS GENERALES DEL PROCESO DE EVALUACIÓN NOMBRE DEL ALUMNO MATRICULA: FECHA: ANÁLISIS DE MECANISMOS. CUARTO CUATRIMESTRE XXXXXXXXX NOMBRE DEL EVALUADOR INSTRUCCIONES Estimado usuario: • Usted tiene en las manos un instrumento de evaluación que permitirá fundamentar las actividades que ha demostrado a través de su desempeño o en la entrega de sus productos. • Conteste los siguientes planteamientos de manera clara. • Le recordamos tomar el tiempo necesario para contestar y desarrollar su contenido. CÓDIGO ASPECTO En un Mecanismo de leva seguidor las levas se clasifican como: A) Radial, axial y de traslación B) Curva, plana y de rodillo C) Trasladante y rotatorio CUMPLE SI NO Se refiere solo a la parte del eslabón que está en contacto con una leva A) Pista o ranura B) Semijunta C) Seguidor CUMPLE SI NO SI NO Son algunos de los movimientos de un sistema de leva-seguidor A) Parabólico, Armónico simple y cicloide B) Armónico Simple, Oscilatorio y Cicloide C) Cicloide, Inverso y armónico simple. CUMPLE 45 Representa el desplazamiento del seguidor desplazamiento de la leva A) Diagrama de cuerpo libre B) Diagrama de desplazamiento C) Desplazamiento de excentricidad. en función del CUMPLE tiempo SI del NO Coloque en el paréntesis la letra que corresponde a la figura mostrada: A B ( ) Leva radial ( ) Leva axial ( ) Leva de traslación lineal CUMPLE : SI NO 46 Complete la nomenclatura geométrica del siguiente sistema leva - seguidor CUMPLE : Firma del Alumno SI NO Firma del Evaluador 47 DIAGRAMAS DE DESPLAZAMIENTO /PERFIL DE LEVA (XXXXXXXXXXX) CUESTIONARIO DATOS GENERALES DEL PROCESO DE EVALUACIÓN NOMBRE DEL ALUMNO MATRICULA: FECHA: XXXXXXXXX ANÁLISIS DE MECANISMOS. CUARTO CUATRIMESTRE NOMBRE DEL EVALUADOR INSTRUCCIONES Estimado usuario: • Usted tiene en las manos un instrumento de evaluación que permitirá fundamentar las actividades que ha demostrado a través de su desempeño o en la entrega de sus productos. • Conteste los siguientes planteamientos de manera clara. • Le recordamos tomar el tiempo necesario para contestar y desarrollar su contenido. CÓDIGO ASPECTO La figura siguiente muestra una leva y seguidor. Mediante métodos gráficos calcule el ángulo de presión en la posición mostrada. CUMPLE SI NO 48 Se desea diseñar un diagrama de desplazamiento para una leva de movimiento alternativo de rodillo cuya velocidad de giro es de 200 r.p.m ,constante que cumpla con las siguientes condiciones: • • • • • • • Tramo de subida hasta alcanzar una detención con una elevación de 1 cm., asociado a un ángulo girado por la leva de 90º. Detención durante un giro de la leva de 15º . Tramo de descenso hasta alcanzar un desplazamiento de primera derivada constante. Tramo de primera derivada constante que se mantendrá durante un giro de la leva de 45º y al que corresponderá un descenso de un tercio de la elevación Tramo de descenso hasta alcanzar su detención Detención durante un giro de la leva de 30º Suponer que la elevación de los tramos 3 y 5 son iguales. a) Seleccionar funciones de desplazamiento adecuadas y obtener los parámetros que las definen. b) Calcular la velocidad y aceleración del seguidor para un ángulo de la leva de 68º 49 CUMPLE SI NO Diseñe una leva de doble detenimiento para mover un seguidor de 0 a 2.5” en 60º , detenimiento durante 120º, bajada de 2.5” en 30º y detenimiento en el resto del movimiento. El ciclo total debe tomar 4 seg. Elija funciones adecuadas de subida y bajada para minimizar velocidades. Trace los diagramas s v a j CUMPLE SI NO Dimensione la leva del problema anterior para un seguidor de rodillo de 1” de radio si se considera el ángulo de presión y el radio de curvatura. Use excentricidad sólo si es necesario para balancear esas funciones. Grafique ambas funciones y Trace el perfil de la leva. CUMPLE SI NO 50 Una leva de disco que gira en SMR mueve un seguidor radial de cara plana en un recorrido total de 11/2 pulgadas con las siguientes cifras de elevación: Dibuje el perfil de la leva usando un radio mínimo de 1 pulgada. Determine la cara del seguidor (simétrica) CUMPLE : Firma del Alumno SI NO Firma del Evaluador 51 TEORÍA DE ENGRANAJES (XXXXXXXXXXX) CUESTIONARIO DATOS GENERALES DEL PROCESO DE EVALUACIÓN NOMBRE DEL ALUMNO MATRICULA: FECHA: ANÁLISIS DE MECANISMOS. CUARTO CUATRIMESTRE XXXXXXXXX NOMBRE DEL EVALUADOR INSTRUCCIONES Estimado usuario: • Usted tiene en las manos un instrumento de evaluación que permitirá fundamentar las actividades que ha demostrado a través de su desempeño o en la entrega de sus productos. • Conteste los siguientes planteamientos de manera clara. • Le recordamos tomar el tiempo necesario para contestar y desarrollar su contenido. CÓDIGO ASPECTO Engranes utilizados para transmitir potencia entre ejes paralelos. A) Engranes helicoidales B) Engranes rectos C) Engranes cónicos CUMPLE SI NO Engranes en los cuales los dientes forman un ángulo de hélice con respecto al eje del engrane A) Engranes cónicos B) Engranes hipoidales C) Engranes helicoidales CUMPLE SI NO Engranes utilizados para transmitir potencia entre ejes no paralelos que se intersecan A) Engranes cónicos D) Engranes hipoidales E) Engranes rectos CUMPLE SI NO 52 Engranes utilizados cuando los ejes son no paralelos ni se intersecan A) Engranes Hipoidales B) Engranes cónicos C) Engranes helicoidales CUMPLE SI NO Complete la nomenclatura del diente de engrane mostrado en la siguiente figura CUMPLE : SI NO Cuando los engranes se colocan endentados para formar un juego de engranes es usual referirse al más pequeño como A) Engrane B) Piñón C) Sinfín CUMPLE : SI NO Curva geométrica comúnmente utilizada para generar la forma de un diente de engrane A) Senoidal B) Cicloide C) involuta CUMPLE : SI NO 53 Establece que la relación de velocidad angular entre los engranes de un juego de engranes permanece constante mientras permanecen engranados A) Ley fundamental de engranaje B) Razón de velocidades C) Ventaja mecánica CUMPLE : SI NO Es la razón entre el número de dientes del engrane de entrada sobre el número de dientes del engrane de salida A) Relación de velocidad B) Relación de par de torsión C) Relación de contacto CUMPLE : SI NO SI NO Coloque en el paréntesis la letra que corresponde a la figura mostrada: A B D C E ( ) Engranaje helicoidal ( ) Engranaje Hipoidal ( ) Engranaje Recto ( ) Engranaje de tornillo sinfín ( ) Engranaje cónico CUMPLE : Firma del Alumno Firma del Evaluador 54 ANÁLISIS DE ENGRANAJES (XXXXXXXXXXX) CUESTIONARIO DATOS GENERALES DEL PROCESO DE EVALUACIÓN NOMBRE DEL ALUMNO MATRICULA: FECHA: ANÁLISIS DE MECANISMOS. CUARTO CUATRIMESTRE XXXXXXXXX NOMBRE DEL EVALUADOR INSTRUCCIONES Estimado usuario: • Usted tiene en las manos un instrumento de evaluación que permitirá fundamentar las actividades que ha demostrado a través de su desempeño o en la entrega de sus productos. • Conteste los siguientes planteamientos de manera clara. • Le recordamos tomar el tiempo necesario para contestar y desarrollar su contenido. CÓDIGO ASPECTO Un engrane de 30 dientes tiene dientes de involuta de profundidad completa estándar AGMA con paso diametral de 12. Calcule el diámetro de paso, el paso circular, la cabeza, la raíz, espesor del diente y la holgura. CUMPLE SI NO El espesor de un diente de engranaje de involuta es de 0.196 en un radio de 2.0 pulg. y un ángulo de presión de 20º . Calcular el espesor del diente en el círculo de base. CUMPLE SI NO 55 Un piñón de paso 120, ángulo de presión 20º a profundidad total, de 42 dientes mueve una corona de 90 dientes. Calcule la relación de contacto. CUMPLE SI NO Una corona cónica de 24 dientes y paso diametral de 5 se mueve por medio de un piñón de 16 dientes. Calcular el diámetro de paso y el ángulo de paso del piñón, adendo, dedendo, ancho de cara y diámetro de paso del engranaje. CUMPLE SI NO Se conectan dos flechas cruzadas con engranajes helicoidales, con reducción de engranajes de 3:1, ángulo de flecha de 60º y distancia entre centros igual a 10.00 pulg. Si el piñón tiene 35 dientes y un paso diametral normal de 8, calcular los ángulos de hélice y los diámetros de paso si los engranajes son del mismo sentido CUMPLE : SI NO 56 Un sinfín de cinco cuerdas mueve una corona de 33 dientes con un ángulo de flecha de 90º. La distancia entre centros es de 2.75 pulg. y el ángulo de avance es de 20º . Calcular los diámetros de paso, el avance y el paso axial del sinfín. CUMPLE : Firma del Alumno SI NO Firma del Evaluador 57 TEORIA DE TRENES DE ENGRANAJES (XXXXXXXXXXX) CUESTIONARIO DATOS GENERALES DEL PROCESO DE EVALUACIÓN NOMBRE DEL ALUMNO MATRICULA: FECHA: ANÁLISIS DE MECANISMOS. CUARTO CUATRIMESTRE XXXXXXXXX NOMBRE DEL EVALUADOR INSTRUCCIONES Estimado usuario: • Usted tiene en las manos un instrumento de evaluación que permitirá fundamentar las actividades que ha demostrado a través de su desempeño o en la entrega de sus productos. • Conteste los siguientes planteamientos de manera clara. • Le recordamos tomar el tiempo necesario para contestar y desarrollar su contenido. CÓDIGO ASPECTO Es cualquier conjunto de dos o más engranes conectados A) Juego de engranes B) Tren de engranajes C) Engranaje compuesto CUMPLE SI NO En un tren de engranajes, es la razón entre el número de dientes del engrane de entrada( Nent) sobre el número de dientes del engrane de salida(Nsal) A) Relación de par de torsión B) Relación del tren C) Relación de velocidad angular CUMPLE SI NO SI NO Es aquel en el que por lo menos un eje tienes más de un engrane. A) Tren de engranaje compuesto B) Tren doble C) Juego de engranajes CUMPLE 58 Engranaje que se mueve de tal forma que no solo gira alrededor de su propio centro sino al mismo tiempo gira alrededor de otro centro A) Engrane solar D) Engrane planetario E) Engrane anular CUMPLE SI NO Diseñe un tren de engranajes compuesto con una relación exacta de 150:1. y paso diametral de 6 .Encuentre una combinación de engranes que produzca esta relación de tren. CUMPLE : Firma del Alumno SI NO Firma del Evaluador 59 ANÁLISIS DE TRENES DE ENGRANAJES (XXXXXXXXXXX) CUESTIONARIO DATOS GENERALES DEL PROCESO DE EVALUACIÓN NOMBRE DEL ALUMNO MATRICULA: FECHA: ANÁLISIS DE MECANISMOS. CUARTO CUATRIMESTRE XXXXXXXXX NOMBRE DEL EVALUADOR INSTRUCCIONES Estimado usuario: • Usted tiene en las manos un instrumento de evaluación que permitirá fundamentar las actividades que ha demostrado a través de su desempeño o en la entrega de sus productos. • Conteste los siguientes planteamientos de manera clara. • Le recordamos tomar el tiempo necesario para contestar y desarrollar su contenido. CÓDIGO ASPECTO La figura siguiente muestra un tren de engranajes epicíclico. Los números de dientes se muestran en la figura, El brazo es impulsado en el SMR a 60 rpm y el engrane A en el eje 1 está fijo a la bancada. Encuentre la velocidad del engrane D en el eje 2. Calcule además la eficiencia de este tren si los engranes básicos tienen E0= 0.98. CUMPLE SI NO 60 Sea el tren de la figura, donde se indican el no de dientes de cada rueda. Calcular la velocidad angular del eje V cuando el eje X gira con una velocidad constante de 20 rads/s en sentido horario y el eje Y lo hace con 20 rad/s en sentido antihorario. CUMPLE SI NO La figura siguiente muestra el conjunto de engranes planetarios de transmisión para un servomecanismo de avión. Si la flecha A se conecta con el motor, determinar la reducción de velocidad angular ω A / ω B CUMPLE SI NO 61 En el tren de engranajes planetarios mostrado en la figura, la flecha A gira a 450 rpm y la B a 600rpm en las direcciones mostradas. Calcular la velocidad de la flecha C y dar su dirección de rotación. CUMPLE SI NO Se desea formar un tren de dos pasos, o con dos pares de ruedas, para obtener la relación de velocidades de 1/12. El número de dientes no debe ser menor que 15 en ninguna rueda, y la reducción en el primer paso debe ser aproximadamente el doble de la obtenida en le 2º. Determinar el número de dientes de todas las ruedas. CUMPLE : SI NO 62 La figura muestra una transmisión de reducción para hélice de avión en forma diagramática. Determinar la velocidad de la hélice en magnitud y dirección si el motor gira a 2450 rpm en la dirección mostrada. CUMPLE : Firma del Alumno SI NO Firma del Evaluador 63 EVALUACIÓN REPORTES DE PRÁCTICA (XXXX) LISTA DE COTEJO DATOS GENERALES DEL PROCESO DE EVALUACIÓN NOMBRE DEL ALUMNO MATRICULA: FECHA: ANÁLISIS DE MECANISMOS. CUARTO CUATRIMESTRE NOMBRE DEL EVALUADOR INSTRUCCIONES Revise los documentos o actividades que se solicitan; marque “SI” cuando la evidencia a evaluar se cumple; y “NO” en caso contrario. En La columna de “OBSERVACIONES” registre los datos relevantes asociados a la evaluación. CÓDIGO ITEM SI NO OBSERVACIONES La documentación del producto (proyecto) cumple con los Requisitos de: 1. Presentación 2. Ortografía y redacción adecuadas 3. Maneja lenguaje técnico pertinente. El contenido del reporte cumple los siguientes campos: 4. Portada 5. Objetivo de la práctica 6. Introducción 7. Equipo y Material 8. Desarrollo (Explicación funcional de mecanismos/máquinas, descripción del proceso seguido, medios utilizados, esquemas, diagramas, y resultados obtenidos) 9. Observaciones 10. Conclusiones 11. Incluye referencias bibliográficas o de Internet consultadas de acuerdo a formato establecido Firma del Alumno Firma del Evaluador 64 EVALUACIÓN DE PROTOTIPO DE MECANISMO(XXX) LISTA DE COTEJO DATOS GENERALES DEL PROCESO DE EVALUACIÓN NOMBRE DEL ALUMNO MATRICULA: FECHA: ANÁLISIS DE MECANISMOS. CUARTO CUATRIMESTRE NOMBRE DEL EVALUADOR INSTRUCCIONES Revise los documentos o actividades que se solicitan; marque “SI” cuando la evidencia a evaluar se cumple; y “NO” en caso contrario. En La columna de “OBSERVACIONES” registre los datos relevantes asociados a la evaluación. CÓDIGO ITEM SI NO OBSERVACIONES La presentación del producto (prototipo) cumple con los Requisitos de: 1. Tiempo y forma de entrega 2. Planos utilizados Las características del prototipo cumple los siguientes campos: 3.Funcionalidad 4.Materiales solicitados 5. Especificaciones de diseño adecuadas 6. Seguridad en la operación 7. Resistencia 8. Flexibilidad de fabricación 9. Creatividad e innovación 10. Desempeño Firma del Alumno Firma del Evaluador 65 INSTRUMENTO PARA EVALUAR ACTITUDES (XXX) GUÍA DE OBSERVACIÓN DATOS GENERALES DEL PROCESO DE EVALUACIÓN NOMBRE DEL ALUMNO MATRICULA: FECHA: ANÁLISIS DE MECANISMOS. CUARTO CUATRIMESTRE NOMBRE DEL EVALUADOR INSTRUCCIONES Revise los documentos o actividades que se solicitan; marque “SI” cuando la evidencia a evaluar se cumple; y “NO” en caso contrario. En La columna de “OBSERVACIONES” registre los datos relevantes asociados a la evaluación. CÓDIGO ITEM SI NO OBSERVACIONES 1. Sigue las indicaciones proporcionadas por el profesor. 2. Respeta las medidas de seguridad en el laboratorio. 3. Se hace responsable por el equipo y material que le proporciona el encargado del laboratorio. 4. Hace uso adecuado del equipo, herramientas y material requerido en la práctica. 5. Facilita el adecuado aprovechamiento de la práctica al mantener la disciplina y el orden en el desarrollo de la misma. 6. Mantiene el área de trabajo limpia y ordenada para facilitar la realización de la práctica. 7. Interactúa de manera apropiada con los demás integrantes de su equipo. 8. Demuestra interés y respeto por la opinión de los demás. 9. Son adecuados y pertinentes sus comentarios sobre la práctica y los objetivos de la misma. 10. Entrega el equipo, herramienta y materiales tal como se le proporciono el encargado de laboratorio. 66 GLOSARIO A Aceleración.- Se conoce también como aceleración lineal, y es la variación de la velocidad de un objeto por unidad de tiempo. Aceleración angular.- Magnitud vectorial que caracteriza la variación de la velocidad angular de un móvil que describe una trayectoria circular o de un sólido rígido que gira alrededor de un eje fijo. Se representa por a y su unidad es rad ⋅ s −2 Análisis.- Examinar en forma crítica un diseño ya existente o propuesto con el fin de determinar si es adecuado para el trabajo de que se trate. Articulación.- Unión entre dos elementos que permite el movimiento relativo entre ellas. B Balancear.- Igualar o poner en equilibrio. Balanceo.- Acción o efecto de balancear. Biela.- Barra que sirve para transformar el movimiento de vaivén en otro de rotación, o viceversa. Bifurcación.- División en dos ramales ó brazos. C Cadena.- Serie de muchos eslabones enlazados entre sí. Cadena cinemática.- Serie de eslabones conectados por pares. Centro instantáneo de velocidad.- Ubicación instantánea de un par de puntos de coincidentes de dos cuerpos rígidos diferentes para los que las velocidades absolutas de los dos puntos son iguales. Ciclo.- Cuando las partes de un mecanismo han pasado por todas las posiciones posibles que pueden tomar después de iniciar y han regresado a sus posiciones relativas originales. Cinemática.- Estudio de los cuerpos en movimiento, sin considerar las fuerzas las fuerzas que lo producen. Es el estudio de la posición, el desplazamiento, la rotación, la rapidez, la velocidad y la aceleración. Cinética.- Es el estudio de los cuerpos en movimiento y de las fuerzas que lo producen (sin moverse). Coeficiente de rozamiento dinámico.- Es el medido cuando ambas superficies están en movimiento relativo (puede moverse una sola o ambas). 67 Coeficiente de rozamiento estático.- Es el medido cuando ambas superficies están en reposo. D Dinámica.- Análisis de sistemas que cambian con el tiempo. Se divide en cinemática y cinética. Diagrama de cuerpo libre (DLC).- Es la representación esquemática de las fuerzas que actúan sobre un cuerpo. E Energía.- Se define como la capacidad de un cuerpo para realizar un trabajo, por razón de su movimiento o configuración. Energía cinética.- Es una forma de energía debida al movimiento de los cuerpos. Equivale al trabajo que es necesario realizar para que un cuerpo pase del estado de reposo (v = 0) al estado de desplazamiento con una velocidad v. Energía mecánica.- Es aquella que poseen los cuerpos capaces de producir movimiento. Energía potencial.- Es la energía almacenada en un sistema, o como una medida del trabajo que un sistema puede entregar. Es aquella que poseen los cuerpos que están en reposo y depende de su posición en el espacio (altura). Engrane o ruedas dentadas.- Se puede definir como un elemento de maquinaria que se encarga de transmitir potencia, cambios de velocidad o torque (movimiento) rotatorio entre ejes paralelos; con una gran eficiencia. Engranaje.- Sistema mecánico basado en ruedas dentadas que sirve para transmitir el movimiento de rotación de un eje a otro, invirtiendo eventualmente sentido o modificando su velocidad angular. Engranaje helicoidal.- Son engranes cilíndricos que tienen los dientes inclinados o no son paralelos al eje de rotación, con la ventaja de ser menos ruidosos. Engranaje cónico.- Tienen dientes formados en superficies cónicas y se utilizan principalmente para transmitir movimiento entre ejes que se intersecan. Engrane recto.- Son engranes cilíndricos que tienes sus dientes paralelos al eje de rotación y se utilizan para transmitir movimiento de un eje a otro que es paralelo. Embrague.- Son acoplamientos que permiten desconectar los árboles o 68 ejes acoplados durante la rotación. Embrague de fricción.- Se diseñan para reducir el choque del acoplamiento, mediante el resbalamiento durante un periodo de embrague. Embrague positivo.- Se diseñan para la transmisión sin resbalamiento del momento de torsión. Eslabón.- Es un cuerpo rígido que tiene dos o más pares, por medio de los cuales se puede conectar a otros cuerpos para transmitir fuerza o movimiento. Estática.- Análisis de sistemas en los que el tiempo no es un factor determinante. Eslabón rígido.- Eslabón que puede transmitir esfuerzos de tensión y compresión. Trabaja a tensión y compresión. Eslabón flexible.- Eslabón que trabaja a tensión o compresión. Sólo transmite esfuerzos en una sola dirección. F Fase.- Posiciones relativas simultáneas de un mecanismo en un instante dado durante un ciclo. Freno.- Dispositivo mecánico que se aplica a la superficie de un eje, una rueda o un disco giratorio, de manera que reduce el movimiento mediante fricción Fricción.- Es la resistencia que existe cuando dos superficies sólidas se deslizan o tienden a deslizarse una sobre la otra. G Grado de libertad.- Es el número mínimo de variables que se requieren para especificar de manera única la configuración de un acoplamiento. I Inercia.- Propiedad de los cuerpos de no modificar su estado de reposo o movimiento si no es por la acción de una fuerza. Inversión.- Cuando se permite mover el eslabón que originalmente estaba fijo en un mecanismo y se fija otro eslabón que tenia movimiento. J Junta.- Unión de dos o más elementos. K Kutsbach, criterio de.- Regla para determinar la movilidad de un 69 mecanismo. Kennedy; Teorema de.- Establece que tres cuerpos en movimiento plano general, los tres centros instantáneos se encuentran en una línea recta común. L Ley de Inercia.- Todo cuerpo permanece en su estado actual de movimiento con velocidad uniforme o de reposo a menos que sobre él actué una fuerza externa neta o no equilibra. (1ra Ley de Newton) Leva.- Dispositivo para transformar un movimiento en otro. El movimiento de la leva (usualmente rotatorio) se transforma en oscilación, traslación o ambos, en el seguidor o palpador. M Máquina.- Mecanismo o conjunto de mecanismos que transmiten fuerza desde la fuente de energía hasta la resistencia que se debe vencer. Mecánica.- Ramo del análisis científico que se ocupa de los movimientos, el tiempo, y las fuerzas. Se divide en estática y dinámica. Mecanismo.- Combinación de cuerpos rígidos o resistentes formados de tal manera y conectados de tal forma que se mueven uno sobre el otro con su movimiento relativo definido. Movilidad.- Número de grados de libertad que posee un sistema. Número de parámetros de entrada que se deben controlar independientemente para llevar el dispositivo a una posición en particular. Movimiento rígido.- Movimiento restringido, sólo se da en ciertas direcciones. Movimiento combinado.- Movimiento de rotación y traslación. Movimiento helicoidal.- Cuando un cuerpo rígido se mueve de tal manera que cada punto del mismo tiene movimiento de rotación alrededor de un eje fijo y al mismo tiempo tiene una traslación paralela al eje. Movimiento esférico.- Movimiento de un cuerpo rígido de tal manera que cada punto del cuerpo tiene movimiento alrededor de un punto fijo en tanto que permanece a una distancia constante del mismo. Movimiento espacial.- Movimiento en el cual un cuerpo rígido tiene movimiento de rotación alrededor de tres ejes no paralelos y de traslación en tres direcciones independientes. O Oscilación.- Acción y efecto de oscilar. 70 Oscilar.- Efectuar movimientos de vaivén a la manera de un péndulo o de un cuerpo colgado de un resorte o movido por él. P Par.- Formas geométricas mediante las cuales se unen dos miembros de un mecanismo. Par de giro.- Par que solo permite rotación relativa. También llamado revoluta. Par deslizante.- Par que solo permite deslizamiento. Par inferior.- Si la unión o articulación mediante la cual se conectan dos miembros tiene un contacto superficial, como una unión de perno. Par superior.- Si la conexión ocurre a lo largo de una línea como en un rodamiento de bolas. Periodo.- Tiempo requerido para que se cumpla un ciclo. R Rotación.- Movimiento plano de un cuerpo rígido en el que cada punto permanece a una distancia constante de un eje fijo que está perpendicular al plano del movimiento. S Seguidor.- Elemento utilizado para seguir el contorno de una leva y así producir un movimiento de oscilación y/o traslación. Síntesis.- Proceso de idear un método para lograr un propósito dado. Es el proceso de establecer tamaños, formas, composiciones y disposiciones de las piezas de tal modo que la máquina resultante desempeñe las tareas prescritas. T Traslación.- Movimiento en el cual la posición de cada línea recta del cuerpo es paralela a todas sus demás posiciones. Traslación curvilínea.- Movimiento en el cual las trayectorias de los puntos son curvas idénticas a un plano fijo. Traslación rectilínea.- Movimiento en el cual todos los puntos del cuerpo se mueven en trayectorias de líneas rectas paralelas. Tren de Engranaje.- Sistema mecánico basado en ruedas dentadas que sirve para transmitir el movimiento de rotación de un eje a otro, invirtiendo eventualmente sentido o modificando su velocidad angular. 71 Torsión.- Deformación helicoidal que sufre un cuerpo cuando se le aplica un par de fuerzas (sistema de fuerzas paralelas de igual magnitud y sentido contrario). La torsión se puede medir observando la deformación que produce en un objeto un par determinado. Por ejemplo, se fija un objeto cilíndrico de longitud determinada por un extremo, y se aplica un par de fuerzas al otro extremo; la cantidad de vueltas que dé un extremo con respecto al otro es una medida de torsión. V Vector.- Es un conjunto de n componentes ordenados que representa una propiedad o parámetro que tiene magnitud, dirección y sentido en el espacio n-dimensional. Vector unitario.- Vector cuya magnitud es igual a la unidad. Si A es un vector, entonces a sería un vector unitario en la misma dirección de A si a = A / A donde A > 0 . Velocidad angular.- magnitud vectorial que caracteriza la variación del ángulo recorrido por un móvil que describe una trayectoria circular o de un sólido rígido que gira alrededor de un eje fijo. Volante de inercia.- Es un elemento totalmente pasivo, únicamente aporta al sistema una inercia adicional. Al incrementarse la inercia del sistema, en igualdad de condiciones, se reducen las fluctuaciones de velocidad. 72 BIBLIOGRAFÌA 1 Erdman, Arthur G., "Diseño de mecanismos, análisis y síntesis", Mexico Edit. Prentice Hall cop. 1999 2 Dijksman, E.A., "Cinemática de mecanismos" mecanismos", os", México , Editorial Limusa. 3 Hall, A. S.,””Diseño de máquinas. Teoría y problemas”. problemas”. Editorial Mc Graw-Hill 4 Mabie, Hamilton H., "Mecanismos Mecanismos y dinámica de maquinaria ", México Editorial. Limusa . 5 Norton, Robert L.,"Diseño "Diseño de maquinaria, una introducción introducción a la síntesis y al análisis de mecanismos y Máquinas ",Editorial McGraw-Hill . 6 Shigley, Joseph Edward., "Teoría de máquinas y mecanismos" mecanismos", México; Editorial McGraw-Hill . 73 NOTA : El presente programa, sujeto a revisión, revisión, esta propuesto para trabajar con una herramienta computacional para el modelado y representado gráfico de cualquier tipo de mecanismo como lo es el Winmec, Adams o Working Model. propuestos, tos, y Asimismo quedan a consideración el nivel y tipo de ejercicios propues complementarlo con el desarrollo de modelos didácticos desarrollados por el alumno así como el desarrollo de un proyecto integrador de la asignatura. 74