Tema 2: Sistemas 2.1 Introducción { }• { })(
Anuncio
(")
Tema 2: Sistemas
Tema 2: Sistemas
1
© Francisco J. González, UC3M 2009
2.1 Introducción
Un sistema responde con unas determinadas señales a la
acción de otras. x(t )
sistema
y (t ) = T {x(t )}
T {•}
• Ejemplo
− Tiempo continuo: sistema mecánico
b
dy(t)
dt
y(t)
M
d 2 y (t )
dy (t )
+b
+ ky (t ) = F (t )
2
dt
dt
Sistema general (orden 2)
d 2 y (t )
dy (t )
+ 2α
+ ω 02 y (t ) = ω 02 x(t )
2
dt
dt
© Francisco J. González, UC3M 2009
Sistemas y Circuitos
2
1
Tema 2: Sistemas
2.1 Introducción
Un sistema responde con unas determinadas señales a la
acción de otras.
x(t )
sistema
T {•}
y (t ) = T {x(t )}
• Ejemplo
− Tiempo discreto: Acumulador
Acumulador
∑ x[k ]
n
x[n]
y[n] =
n
∑ x[k ]
k =−∞
k = −∞
x[n]
y[n] =
y[n]
n −1
∑ x[k ] + x[n] = y[n − 1] + x[n]
k =−∞
y[n − 1]
Memoria
Retardo
3
© Francisco J. González, UC3M 2009
2.2 Interconexión de sistemas
Serie
x(t ) Sistema #1
T1 {•}
Sistema #2
T2 {•}
y (t ) = TN {TN −1{ T2 {T1{x(t )}
Sistema #N
TN {•}
y (t )
}}}
Paralelo
Sistema #1
T1 {•}
Sistema #2
x(t )
T2 {•}
y (t ) = T1{x(t )} + T2 {x(t )}+
+ TN {x(t )}
Sistema #N
TN {•}
© Francisco J. González, UC3M 2009
Sistemas y Circuitos
4
2
Tema 2: Sistemas
2.2 Interconexión de sistemas
Serie/Paralelo
x(t )
Sistema #2
Sistema #1
T2 {•}
T1{•}
y(t )
Sistema #3
T3 {•}
Sistema #N
TN {•}
Sistemas realimentados
x (t )
Sistema #1
T1 {•}
T3 {y (t )}
Sistema #2
T2 {•}
y (t )
Sistema #3
T3 {•}
• Ejemplo
5
© Francisco J. González, UC3M 2009
2.3 Propiedades de los sistemas
Sistemas sin/con memoria
• Sin memoria: la salida, para cada instante de tiempo (valor de
la variable independiente) depende ÚNICAMENTE de la
entrada en ese mismo instante de tiempo
− Ejemplos:
x[n]
x(t )
Acumulador
n]
•x [Con
memoria: y[n]
x[ k ]
∑
n
y[n] = nx[n]
nx[n]
y (t ) = x(t )
x(t )
x[n]
y[n]
k = −∞
y[ n − 1]
Memoria
Retardo
© Francisco J. González, UC3M 2009
Sistemas y Circuitos
6
3
Tema 2: Sistemas
2.3 Propiedades de los sistemas
Invertibilidad
• Diversas definiciones
− “Un sistema es invertible si al observar la salida se puede
determinar entrada”
− “... cuando distintas entradas conducen a distintas salidas”
• Si un sistema es invertible, existe un sistema –que
denominaremos inverso- tal que conectado en serie produce
el sistema identidad.
Sistema #1
x(t )
T {•}
y (t )
Sistema
inverso
TINV {•}
z (t )
z (t ) = TINV {T { x(t )}} ≡ x(t )
7
© Francisco J. González, UC3M 2009
2.3 Propiedades de los sistemas
Invertibilidad x(t )
• Ejemplos
−
y(t )
Sistema
T {•}
y[n] = cos ( x[n])
Sistema
inverso
TINV {•}
z (t )
z (t ) = TINV {T { x(t )}} ≡ x(t )
x[ n] y x[ n] + 2π producen la misma salida
− y[n] =
n
∑ x[k ]
k =−∞
y[n] = y[ n − 1] + x[ n]
x[n]
x[n] = y[n] − y[n − 1]
x[n]
y[ n]
y[ n − 1] Memoria
Retardo
Memoria
y[ n − 1]
Retardo
© Francisco J. González, UC3M 2009
Sistemas y Circuitos
8
4
Tema 2: Sistemas
2.3 Propiedades de los sistemas
Causalidad
• Un sistema es causal –también denominado “físicamente
realizable”- cuando la salida en un instante de tiempo t0
depende ÚNICAMENTE de valores de la entrada en t ≤ t0
y(t ) = f ( x(t − t0 )), t0 ≥ 0
Sistema
causal
x(t )
y[n] = f ( x[n], x[n − 1], x[n − 2],…)
x[n]
• Ejemplos
x(t )
y(t )
x(t + 2)
x(t )
x(t )
y(t )
x(t ) − x(t − 2)
y(t )
x(t )
1
y(t )
1
y(0) = x(2)
0
−2 0
t
t
2
t
0
Sistema NO causal
t
0
Sistema causal
9
© Francisco J. González, UC3M 2009
2.3 Propiedades de los sistemas
Estabilidad
• Distintas definiciones
− Intuitiva: Sistema que responde con señales acotadas ante
entradas acotadas (Bounded Input Bounded Output).
y(t ) Sistema estable ⇒ ∀x(t ), x(t ) ≤ K < ∞
x(t ) Sistema
estable
x[n]
x
y[n]
⇓
y(t ) ≤ K y < ∞
x(t )
x(t )
y[n] = y[ n − 1] + x[ n]
x[n]
exp [ x(t )]
y(t )
y(t )
e
1
y[ n − 1] Memoria
Retardo
0
t
0
t
Sistema estable
Sistema NO estable
© Francisco J. González, UC3M 2009
Sistemas y Circuitos
10
5
Tema 2: Sistemas
2.3 Propiedades de los sistemas
Estabilidad
y[n] = y[ n − 1] + x[ n]
x[n]
exp [ x(t )]
x(t )
x(t )
y[ n − 1] Memoria
y(t )
y(t )
e
1
Retardo
t
0
Sistema NO estable
0
Sistema estable
t
• Punto de partida
x(t ) ≤ K x < ∞
x[n] ≤ K x < ∞
y[ n ] =
n
− ¿Se puede encontrar una cota superior (menor que ∞) a la
salida?
∑
k =−∞
x[ k ] ≤
n
∑
n
x[ k ] ≤
k =−∞
∑K
k =−∞
x
=∞
y (t ) = e x ( t ) ≤ e
x (t )
≤ eKx = K y < ∞
desigualdad de Schwartz
11
© Francisco J. González, UC3M 2009
2.3 Propiedades de los sistemas
Invarianza temporal
• Un sistema es invariante con el tiempo si responde ante una
entrada desplazada con una salida igualmente desplazada.
x(t )
1
y(t )
Sistema
invariante
t
0
t
0
y(t − t0 )
x(t − t0 )
1
0
t0
t
0
t0
t
• Interpretación: la respuesta del sistema ante una señal de
entrada es independiente del instante en el que ésta se
aplica.
© Francisco J. González, UC3M 2009
Sistemas y Circuitos
12
6
Tema 2: Sistemas
2.3 Propiedades de los sistemas
Invarianza temporal
• ¿Cómo reconocer si un sistema es invariante?
1. Definir x1(t) . Obtener la salida y1(t)
2. Definir x2(t)=x1(t-t0) . Obtener la salida y2(t)
3. Comprobar si y1(t-t0) es igual a y2(t)
SI: Invariante
NO: Variante con el tiempo
x1 (t )
1
y1 (t )
t
0
Sistema
t
0
x2 (t ) = x1 (t − t0 )
y2 (t )
1
0
t
t0
0
t0
t
¿ y2 (t ) = y1 (t − t0 )?
© Francisco J. González, UC3M 2009
13
2.3 Propiedades de los sistemas
Invarianza temporal
1. Definir x1(t) . Obtener la salida y1(t)
2. Definir x2(t)=x1(t-t0) . Obtener la salida y2(t)
3. Comprobar si y1(t-t0) es igual a y2(t)
Ejemplo:
y[n] = x[2n]
© Francisco J. González, UC3M 2009
Sistemas y Circuitos
14
7
Tema 2: Sistemas
2.3 Propiedades de los sistemas
Invarianza temporal
1. Definir x1(t) . Obtener la salida y1(t)
2. Definir x2(t)=x1(t-t0) . Obtener la salida y2(t)
3. Comprobar si y1(t-t0) es igual a y2(t)
Ejemplo:
y[n] =
n
∑ x[k ]
k =−∞
15
© Francisco J. González, UC3M 2009
2.3 Propiedades de los sistemas
Invarianza temporal
1. Definir x1(t) . Obtener la salida y1(t)
2. Definir x2(t)=x1(t-t0) . Obtener la salida y2(t)
3. Comprobar si y1(t-t0) es igual a y2(t)
Ejemplo:
n
y[n] = ∑ x[k ]
k =0
© Francisco J. González, UC3M 2009
Sistemas y Circuitos
16
8
Tema 2: Sistemas
2.3 Propiedades de los sistemas
Invarianza temporal
1. Definir x1(t) . Obtener la salida y1(t)
2. Definir x2(t)=x1(t-t0) . Obtener la salida y2(t)
3. Comprobar si y1(t-t0) es igual a y2(t)
Ejemplo:
y[n] = nx[n]
17
© Francisco J. González, UC3M 2009
2.3 Propiedades de los sistemas
Invarianza temporal
1. Definir x1(t) . Obtener la salida y1(t)
2. Definir x2(t)=x1(t-t0) . Obtener la salida y2(t)
3. Comprobar si y1(t-t0) es igual a y2(t)
Ejemplo:
© Francisco J. González, UC3M 2009
Sistemas y Circuitos
y[n] = x[n]u[n]
18
9
Tema 2: Sistemas
2.3 Propiedades de los sistemas
Linealidad
• Cualidad que define a sistemas que poseen la propiedad de
superposición
x1 (t ) Sistema y1 (t ) = T { x1 (t )}
x2 (t )
T {•}
y2 (t ) = T { x2 (t )}
− Principio de superposición
Aditividad T { x1 (t ) + x2 (t )} = T { x1 (t )} + T { x2 (t )}
Escalado T {α x1 (t )} = αT { x1 (t )}
T {α x1 (t ) + β x2 (t )} = αT { x1 (t )} + β T { x2 (t )}
• Consecuencia intuitiva de la propiedad de escalado
− La respuesta de un sistema lineal ante una entrada idénticamente nula
es una salida idénticamente nula.
20
© Francisco J. González, UC3M 2009
2.4 Sistemas LIT
SLIT: Sistemas Lineales e Invariantes con el Tiempo
Linealidad
• Supongamos que la señal x(t) se puede expresar como una
combinación lineal de señales más simples ( xi(t) ) y que, ante estas
entradas, es fácilmente calculable la salida de un sistema (yi(t) ).
− Entonces, la salida y(t) es:
x(t ) = a1 x1 (t ) +
+ aN xN (t )
Sistema
lineal
y(t ) = a1 y1 (t ) +
+ aN yN (t )
T {•}
• Aplicación:
− Si conocemos la respuesta de un sistema lineal ante señales básicas
(impulsos, escalones, exponenciales complejas), también conoceremos
su respuesta ante combinaciones lineales de esas señales
Ejemplo: señales periódicas.
© Francisco J. González, UC3M 2009
Sistemas y Circuitos
21
10
Tema 2: Sistemas
2.4 Sistemas LIT
Tiempo discreto
• Propiedad: Cualquier señal definida sobre tiempo discreto
puede representarse como una suma de impulsos escalados
y desplazados
-1 0 1 2 3
2
x[n]
3
n
-1 0 1 2 3
n
-1 0 1 2 3
n
-1
2
-1 0 1
3
n
0 1
x[3]δ [ n − 3]
n
=
x[2]δ [n − 2]
x[1]δ [n − 1]
∞
x[n] =
∑ x[k ]δ [n − k ]
k = −∞
x[0]δ [n]
22
© Francisco J. González, UC3M 2009
2.4 Sistemas LIT
Tiempo continuo
• Cualquier señal definida sobre tiempo continuo puede
representarse como una integral (suma) de impulsos
escalados y desplazados
x(t )
x(kε )δ ε (t − kε )ε
∞
∑
x(t ) =
k =−∞
x(kε )δ ε (t − kε )ε
Variable independiente
0
k ε ( k + 1)ε
t
∞
∫ x(τ )δ (t −τ )dτ = x(t)
−∞
Variable integración
© Francisco J. González, UC3M 2009
Sistemas y Circuitos
23
11
Tema 2: Sistemas
2.4 Sistemas LIT
Linealidad
x[n]
2
-1 0 1
3
n
+ x[−1]δ [n + 1] + x[0]δ [n] + x[1]δ [n −1] +
=
∞
x[n] =
x(τ )
∑ x[k ]δ [n − k ]
k = −∞
coeficiente
δ (t − τ )
(no depende de t)
x(t) = ∫
∞
−∞
0
t
Combinación lineal de δ
x(τ )δ (t −τ )dτ
τ
Señal (depende de t)
• Si conocemos la respuesta de un Sistema lineal ante δ(t-τ) (ó
δ[n-k]) podremos conocer la respuesta ante cualquier entrada
x(t) (ó x[n])
24
© Francisco J. González, UC3M 2009
2.4 Sistemas LIT
Linealidad
∞
x[n] =
∑ x[k ]δ [n − k ]
k =−∞
k = −∞
δ [n − k ]
δ (t − τ )
x(t) = ∫
∞
−∞
x(τ )δ (t −τ )dτ
∞
∑
y[n] =
Sistema
lineal
T {•}
x[k ]hk [n]
hk [n] = T {δ [n − k ]}
hτ (t ) = T {δ (t − τ )}
y(t) = ∫
∞
−∞
x(τ )hτ (t)dτ
• Si conocemos la respuesta de un Sistema lineal ante δ(t-τ) (ó
δ[n-k]) podremos conocer la respuesta ante cualquier entrada
x(t) (ó x[n])
© Francisco J. González, UC3M 2009
Sistemas y Circuitos
25
12
Tema 2: Sistemas
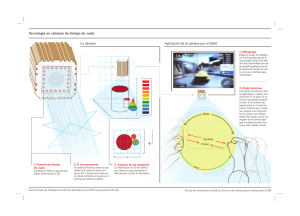
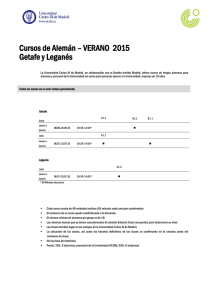
Respuesta al impulso de un canal
multitrayecto
N (t )
h(t;τ ) = ∑ ri (t;τ )δ (t −τ i (t ))
|hτ(t)|2
i =1
τ
Dispe
rsión
temp
or
al
t
za
an
i
r
Va
Te
o ra
mp
l
26
© Francisco J. González, UC3M 2009
2.4 Sistemas LIT
Invarianza Temporal
δ (t )
1
h(t )
Sistema
invariante
t
0
δ (t − t0 )
1
t0
t
t
δ (t )
© Francisco J. González, UC3M 2009
Sistemas y Circuitos
h(t − t0 )
t
t0
0
Conclusión: Si el sistema es lineal e invariante con el tiempo
nos basta conocer la respuesta al impulso unitario para
calcular la respuesta a cualquier entrada arbitraria.
0
•
0
Sistema
Lineal
Invariante
en el Tiempo
h(t )
27
13
Tema 2: Sistemas
2.4 Sistemas LIT
Linealidad e Invarianza Temporal
• Tiempo continuo
δ (t )
1
h(t )
t
0
Sistema
Lineal
Invariante
en el Tiempo
δ (t − t0 )
1
0
t
x(τ )
δ (t −τ )
x(t) = ∫
0
−∞
h(t − t0 )
0
t0
t
h(t)
t0
∞
0
y(t) = ∫
∞
−∞
t τ
x(τ )δ (t −τ )dτ
t
x(τ )h(t −τ )dτ
Convolución:
y(t) = x(t)*h(t)
28
© Francisco J. González, UC3M 2009
2.4 Sistemas LIT
Linealidad e Invarianza Temporal
1
• Tiempo discreto
1 δ [ n]
α2
n
0
h[ n ]
α
α2
n
-2 -1 0 1 2
h[ n − k ]
1
Sistema
Lineal
Invariante
en el Tiempo
δ [n − k ]
1
α
α2
α
α
h[n]
0
x[n]
n
k
-2 -1 0
2
-1 0 1
∞
x[n] =
∑ x[k ]δ [n − k ]
k = −∞
© Francisco J. González, UC3M 2009
Sistemas y Circuitos
3
y[n] =
n
∞
∑
k
α2
n
x[k ]h[n − k ]
k =−∞
Convolución:
y[n] = x[n]*h[n]
29
14
Tema 2: Sistemas
2.5 Convolución
x(t)* y(t) = ∫
∞
−∞
x[n]* y[n] =
x(τ ) y(t −τ )dτ
∞
∑
x[k ] y[n − k ]
k =−∞
Propiedades de la convolución
• Conmutativa: x(t)* y(t) = y(t)* x(t)
t −τ =σ
∞
−∞
dτ =−dσ
= ∫ x(t −σ ) y(σ )( −dσ ) = y(t)* x(t)
x(t)* y(t) = ∫ x(τ ) y(t −τ )dτ =
−∞
τ =−∞→σ =∞ ∞
τ =∞→σ =−∞
∞
x[n]* y[n] = ∑
k =−∞
n−k = l
−∞
x[k]y[n − k] = k = −∞→l =∞ = ∑ x[n − k]y[l] = y[n]* x[n]
k =∞→l = −∞
l =∞
30
© Francisco J. González, UC3M 2009
2.5 Convolución
Propiedades de la convolución
• Asociativa: x[n]*( y[n]* z[n]) = ( x[n]* y[n]) * z[n]
− Consecuencia: Interconexión de Sistemas LIT en serie
Equivalencia
x[n]
w[n]
h1[n]
h2 [n]
y[n]
y[n] = ( x[n]* h1[n]) * h2 [n] = x[n]* ( h1[n]* h2 [n]) = x[n]* heq [n]
x[n]
y[n]
h1[n]* h2 [n]
− Si ahora tenemos en cuenta la conmutatividad h1[n]* h2 [n] = h2 [n]* h1[n]
y[n] = x[n]* ( h1[n]* h2 [n]) = ( x[n]* h2 [n]) * h1[n]
x[n]
© Francisco J. González, UC3M 2009
Sistemas y Circuitos
h2 [n]
z[n]
h1[n]
y[n]
31
15
Tema 2: Sistemas
2.5 Convolución
Propiedades de la convolución
• Distributiva respecto a la suma:
x[n]*( y[n] + z[n]) = ( x[n]* y[n]) + ( x[n]* z[n])
− Consecuencia: Interconexión de Sistemas LIT en paralelo
Sistema #1
h1 (t )
Sistema #2
x (t )
y (t )
x (t ) Sistema Equiv.
h1 (t ) +
h2 (t )
y (t )
hN (t )
Sistema #N
hN ( t )
32
© Francisco J. González, UC3M 2009
2.5 Convolución
Propiedades de la convolución
• Elemento neutro:
− Es una señal y(t) que al convolucionarla con x(t) produce como
resultado la misma señal x(t).
x(t)* y(t) = ∫
∞
x(τ ) y(t −τ )dτ = x(t)
−∞
− Como ...
x(τ )
δ (t −τ )
x(t) = ∫
∞
−∞
0
t
x(τ )δ (t −τ )dτ
τ
− El elemento neutro de la convolución es la función δ(t)
x(t)*δ (t) = x(t);
© Francisco J. González, UC3M 2009
Sistemas y Circuitos
x[n]*δ[n] = x[n]
33
16
Tema 2: Sistemas
2.5 Convolución
Propiedades de la convolución
• Elemento neutro:
x(t)*δ (t − t0 ) = ∫
∞
=∫
∞
−∞
−∞
x(t −τ )δ (τ − t0 )dτ
x(σ )δ (t − t0 −σ )dσ = x(t − t0 )
t
0
x(t − t0 )
δ (t − t0 )
x(t )
0
t0
0
t
t0
t
34
© Francisco J. González, UC3M 2009
2.6 Propiedades de los SLIT
Hemos representado los SLIT en términos de su respuesta
impulsional.
Sistema
x[n]
Lineal
Invariante
en el Tiempo
∞
∑
y[n] =
h[n]
x(t)
Sistema
Lineal
Invariante
en el Tiempo
x[k ]h[n − k ]
k =−∞
y(t) = ∫
∞
−∞
x(τ )h(t −τ )dτ
h(t)
• Por tanto, se pueden conocer las propiedades de un sistema
(memoria, causalidad, ...) analizando su respuesta
impulsional.
© Francisco J. González, UC3M 2009
Sistemas y Circuitos
35
17
Tema 2: Sistemas
2.6 Propiedades de los SLIT
Sistemas LIT sin/con memoria
• Sin memoria: la salida, para cada instante de tiempo (valor de
la variable independiente) depende ÚNICAMENTE de la
entrada en ese mismo instante de tiempo.
− Sistema Lineal Invariante en el Tiempo:
x[n]
y[n] =
h[n]
∞
∑
h[k ]x[n − k ]
k =−∞
=
+ h[−1]x[n + 1] + h[0]x[n] + h[1]x[n − 1] +
− Sistema SIN memoria
x[n]
y[n] = f ( x[n]) ⇒ h[−1] = h[1] = h[−2] =
h[n]
=0
− Sistema LIT sin Memoria:
h[n] = C1δ [n]
C1
n
0
© Francisco J. González, UC3M 2009
h(t ) = C2δ (t )
C2
0
t
36
2.6 Propiedades de los SLIT
Sistemas LIT causales
• Un sistema es causal cuando la salida en un instante de tiempo t0
depende ÚNICAMENTE de valores de la entrada en t ≤ t0
− Sistema causal
x[n]
y[n] = f ( x[n], x[n − 1], x[n − 2],…)
h[n]
− Sistema Lineal Invariante en el Tiempo:
x[n]
y[n] =
h[n]
∞
∑
h[k ]x[n − k ]
k =−∞
=
+ h[−1]x[n + 1] + h[0]x[n] + h[1]x[n − 1] +
− Sistema LIT causal: h(t)=0, t<0 (h[n]=0, n<0)
1
h[ n ]
α
α2
-1 0 1
© Francisco J. González, UC3M 2009
Sistemas y Circuitos
2
h(t )
n
0
t
37
18
Tema 2: Sistemas
2.6 Propiedades de los SLIT
Sistemas LIT causales
1
x[n]
h[ n ]
α
-1 0 1
∞
y[n] = ∑ h[k ]x[n − k ] =
α2
k =0
n
∑
x[k ]h[n − k ]
k =−∞
n
2
Utilizamos valores de la señal de
entrada previos al instante en el que
se calcula la salida (n)
h(t )
x(t )
y(t) = ∫
∞
x(τ )h(t −τ )dτ =
−∞
t
0
=∫
t
h(t) = 0, t < 0
h(t −τ ) = 0,τ > t
x(τ )h(t −τ )dτ
−∞
Utilizamos valores de la señal
de entrada previos al instante
en el que se calcula la salida (t)
38
© Francisco J. González, UC3M 2009
2.6 Propiedades de los SLIT
Causalidad
1
h[ n ]
α
x[n]
-1 0 1
α2
y[n]
Causal
n
2
h(t )
x(t )
0
y(t)
y[n]
Anticausal
t
h[n]
x[n]
2
-1 0 1
© Francisco J. González, UC3M 2009
Sistemas y Circuitos
3
n
No causal
39
19
Tema 2: Sistemas
2.6 Propiedades de los SLIT
Estabilidad
• Tiempo discreto
x[n]
y[n] = x[n]* h[n]
h[ n ]
Sistema
estable ⇒ ∀x[n], x[n] ≤ K X < ∞ ⇒ y[n] ≤ KY < ∞
−
− Estabilidad en SLIT
∞
∑
y[n] =
h[k ]x[n − k ] ⇒ y[n] =
k =−∞
∞
∞
k =−∞
k =−∞
∞
∑
k =−∞
∑ h[k ]x[n − k ]
k =−∞
∑ h[k ]x[n − k ] ≤ ∑
Si
∞
h[k ] x[n − k ] ≤ K X
h[k ] < ∞ ⇒ y[n] ≤ KY = K X
∞
∑
h[k ]
k =−∞
∞
∑
h[k ]
k =−∞
− Los SLIT estables tienen una respuesta impulsional sumable en valor
absoluto.
40
© Francisco J. González, UC3M 2009
2.6 Propiedades de los SLIT
Estabilidad
• Tiempo continuo
x(t )
y (t ) = x(t ) * h(t )
h (t )
Sistema
estable ⇒ ∀x(t ), x(t ) ≤ K X < ∞ ⇒ y(t ) ≤ KY < ∞
−
− Estabilidad en SLIT
∞
y (t ) = ∫ x(t − τ )h(τ )dτ ⇒ y (t ) =
−∞
∫
y (t ) =
Si
∞
−∞
∫
∞
−∞
x(t − τ )h(τ )dτ ≤ ∫
∞
−∞
∫
∞
−∞
x(t − τ )h(τ )dτ
x(t − τ ) h(τ ) dτ
h(τ ) dτ ≤ ∞ ⇒ y (t ) ≤ KY = K X ∫
∞
−∞
h(τ ) dτ
− Los SLIT estables tienen una respuesta impulsional integrable en valor
absoluto.
© Francisco J. González, UC3M 2009
Sistemas y Circuitos
41
20
Tema 2: Sistemas
2.6 Propiedades de los SLIT
Invertibilidad
• Consideremos un sistema LIT y su inverso:
x(t )
y (t )
h (t )
Sistema
inverso
y (t )
x(t )
• El sistema inverso ...
− ¿es lineal?
− ¿es invariante?
x(t )
y (t )
h (t )
hINV (t )
x(t )
( x(t ) * h(t ) ) * hINV (t ) = x(t ) * ( h(t ) * hINV (t ) ) = x(t )
Elemento neutro
h(t ) * hINV (t ) = δ (t )
42
© Francisco J. González, UC3M 2009
2.6 Propiedades de los SLIT
Invertibilidad
• Ejemplo:
x[n]
y[n]
u[ n ]
Sistema
inverso
y[n]
x[n]
u[n]* hINV [n] = δ [n]
δ [n] = u[n] − u[n −1] ⇒ hINV [n] = δ [n] − δ [n − 1]
− Como
hINV [n] = δ [n] − δ [n − 1]
u [n ]
1
1
u[n]
-2 -1 0 1 2 n
-1
© Francisco J. González, UC3M 2009
Sistemas y Circuitos
-2 -1 0 1 2
− u [ n − 1]
n
-1
43
21
Tema 2: Sistemas
2.7 Respuesta al escalón
Para calcular la salida y las propiedades de un SLIT
necesitamos conocer su respuesta impulsional
• Tiempo discreto: no hay problema
δ [n]
Sistema
LIT
h[n]
• Tiempo continuo: ¿cómo generar δ(t)?
− Solución: utilizar la respuesta al escalón (fácilmente generable)
δ (t )
u (t )
Sistema
LIT
h(t )
s (t ) = u (t ) * h(t ) = ∫
t
−∞
h(τ )dτ
− Relaciones entre respuesta impulsional y respuesta al escalón
t
ds (t )
h(t ) = s′(t ) =
s (t ) = ∫ h(τ )dτ
−∞
dt
© Francisco J. González, UC3M 2009
Sistemas y Circuitos
44
22