SISTEMA DE MANEJO DE MATERIALES
Anuncio

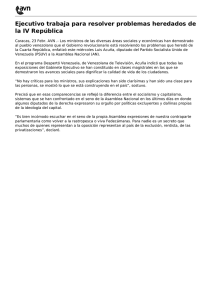
SISTEMA DE MANEJO DE MATERIALES El manejo de materiales en una organización de manufactura representa el sistema nervioso del mismo. Si no está adecuadamente diseñado habrán acciones de descoordinación que llevarán a grandes problemas de productividad. PROFESOR: DR. JORGE ACUÑA A. 1 SISTEMA DE MANEJO DE MATERIALES DEFINICION Es el conjunto de elementos (procedimientos, métodos, equipos, personas, espacio, etc.) que permiten el efectivo movimiento de partes, subproductos y productos a través de una facilidad de manufactura. PROFESOR: DR. JORGE ACUÑA A. 2 1 ECUACION DEL MANEJO DE MATERIALES Necesario Innecesario Tipo + ¿Qué? ¿Porqué? MATERIAL Características Cantidad ¿Viene o va? Unidad Forma Anual Dimensiones Por envío Líquido Temperatura Máx inventario Duración + ¿Cuándo? = ¿Cómo? MOVIMIENTO Granel Gas ¿Dónde? Logística Característica + ¿Quién? METODO Tipo Unidad Equipo Mano obra RF RF: Restricciones físicas / movimiento Peso unitario Recepción Otras PROFESOR: DR. JORGE ACUÑA A. 3 SISTEMA DE MANEJO DE MATERIALES 1. 2. 3. 4. 5. 6. 7. 8. 9. 10. 11. 12. 13. PROCEDIMIENTO DE DISEÑO Entender el manejo de materiales como sistema Evaluar los criterios que caracterizan al sistema Establecer los objetivos del sistema Obtener datos Desarrollar patrones preliminares de flujo Identificar actividades y visualizar relaciones Determinar requerimientos de espacio y asignación de áreas Establecer el patrón de flujo de materiales Identificar y documentar los requerimientos de movimiento. Analizar las características de los materiales Establecer las necesidades de infraestructura Estudiar y seleccionar el sistema apropiado Determinar la factibilidad de mecanización PROFESOR: DR. JORGE ACUÑA A. 4 2 SISTEMA DE MANEJO DE MATERIALES PROCEDIMIENTO DE DISEÑO 14. Relacionar las características de los materiales y requerimientos de movimiento con los sistemas y capacidades de equipo. 15. Hacer una o mas selecciones preliminares de un sistema y de equipo. 16. Evaluar alternativas. 17. Seleccionar el sistema apropiado 18. Chequear la selección por compatibilidad 19. Preparar las especificaciones de rendimiento. 20. Evaluar alternativas de compra de equipo 21. Comprar el equipo. 22. Implementación y evaluación PROFESOR: DR. JORGE ACUÑA A. 5 CRITERIOS DE DISEÑO 1. 2. 3. 4. 5. 6. 7. 8. 9. 10. 11. 12. 13. Incremento de producción y productividad Reducción de costos Mejoramiento de la seguridad Capacidad de almacenamiento Posibilidades de expansión Posibilidades de daño al producto Facilidades de control Mejora en condiciones de trabajo Mejora de calidad Reducción en la dependencia del manejo manual Facilidad de mantenimiento Flujo continuo Flexibilidad PROFESOR: DR. JORGE ACUÑA A. 6 3 CRITERIOS DE DISEÑO 14. Capacidad de manejo de información 15. Requerimientos de espacio 16. Estandarización de componentes 17. Adaptabilidad 18. Optimización del flujo de materiales 19. Manejo de grandes cargas unitarias 20. Uso de mecanización 21. Tiempos muertos mínimos 22. Uso de equipo 23. Mejora del servicio al cliente 24. Cumplimiento con regulaciones actuales y futuras 25. Compatibilidad PROFESOR: DR. JORGE ACUÑA A. 7 CARACTERISTICAS DE LOS MATERIALES 1. 2. 3. 4. 5. 6. 7. 8. Cantidades Volumen unitario Peso unitario Tipo y forma Uniformidad Propiedades físicas Propiedades químicas Propiedades mecánicas PROFESOR: DR. JORGE ACUÑA A. 8 4 TIPOS DE SISTEMAS 1. 2. 3. 4. Orientado al equipo Orientado al material Orientado al método Orientado a la función PROFESOR: DR. JORGE ACUÑA A. 9 SISTEMA ORIENTADO AL EQUIPO z z z Se describe en términos del uso de los tres tipo de equipo: bandas transportadoras, grúas y equipo móvil. El equipo define el flujo a seguir. Se decide sobre cada uno en términos de espacio disponible y características físicas de los materiales en movimiento. PROFESOR: DR. JORGE ACUÑA A. 10 5 SISTEMA ORIENTADO AL MATERIAL z z z Se describe en términos del uso de las características del material a ser movido. Usado para mover materiales líquidos y granel. Se usa también cuando las características del material atentan contra la seguridad del personal. PROFESOR: DR. JORGE ACUÑA A. 11 SISTEMA ORIENTADO AL METODO z Se describe en función del tipo de producción donde va a ser usado tal como: manual, mecánica, producción masiva, automatizada o por órdenes de trabajo. PROFESOR: DR. JORGE ACUÑA A. 12 6 SISTEMA ORIENTADO A LA FUNCION z z Se clasifican el equipo y las actividades de acuerdo con la función Se clasifican en: – Sistemas de transporte (movimiento horizontal) – Sistemas de elevación (movimiento vertical) – Sistemas de conveyors (horizontal o por gravedad) – Sistemas de transferencia (uso de aire con rutas fijas) – Sistemas de autocarga (AGV,s) PROFESOR: DR. JORGE ACUÑA A. 13 NO HAY NECESIDAD DE EQUIPO ¿Cuándo? z z z z z z z z z z z z Bajo volumen de material Baja razón de flujo Flujo no uniforme Unidades pequeñas Distancias muy cortas Área limitada Manejo infrecuente Patrones de flujo variables Pequeño porcentaje de tiempo en operaciones de manejo Costo insignificante de manejo Flujo de materiales muy complejo Serios obstáculos físicos en flujo PROFESOR: DR. JORGE ACUÑA A. 14 7 MANEJO MECANIZADO z z z z z z z z z z Alto volumen Se requiere de movimiento continuo Se requiere de excesivo manejo Mano de obra directa ejecuta labores de manejo Se requiere controlar el flujo Se desea incrementar capacidad Manejo de materiales peligrosos Operadores esperan por materiales Cuellos de botella Espacio limitado PROFESOR: DR. JORGE ACUÑA A. 15 MANEJO AUTOMATIZADO z z z z z z z z Alto volumen Hay un alto porcentaje de manejo en la operación Producto y material son uniformes Es posible sincronizar movimiento con tareas de producción Se requiere de control de producción Reduce costos Se puede tener un número limitado de patrones de flujo El flujo de material es relativamente fijo PROFESOR: DR. JORGE ACUÑA A. 16 8 NIVELES DE MECANIZACION POTENCIA Electricidad Combustión CONTROL Computador NM 10 9 Electrónico 8 Panel de botones 7 Manual 6 5 4 Gravedad Fuerza física 3 2 1 DESCRIPCION Sistema automatizado en línea con autocontrol guiado por un computador central que sincroniza operaciones de manejo y de manufactura (FMS) Sistema mecanizado con instrucciones y control desde una microcomputadora Sistema mecanizado con control manual alimentado con cintas magnéticas o tarjetas programadas Sistema de propulsión manejado por un panel de control de botones con switches Sistema de propulsión operado manualmente en el sitio de trabajo Sistema de propulsión operado por un motor Sistema que utiliza la fuerza de gravedad para provocar el movimiento del material Carretillas manuales que permiten movimiento horizontal y vertical (pueden tener un motor) Carretillas manuales que son empujadas por un operador Manejo manual en recipientes NM: Nivel de mecanización PROFESOR: DR. JORGE ACUÑA A. 17 PRODUCTIVIDAD DEL SISTEMA INDICES 1. Recurso humano RH = Personal asignado a manejo de materiales Personal total de la planta 2. Utilización del equipo de MM UE = C arg a movida por hora Capacidad teórica 3. Espacio para pasillos EP = Espacio ocupado para pasillos Espacio total PROFESOR: DR. JORGE ACUÑA A. 18 9 PRODUCTIVIDAD DEL SISTEMA INDICES 4. Razón de movimiento (RM) RM = Número de movimiento s Número de operacione s productiva s 5. Cargas dañadas (CD) CD = Número de c arg as dañadas Número total de c arg as 6. Energía (E) E= Energía consumida por equipo de manejo Energía total consumida en la planta PROFESOR: DR. JORGE ACUÑA A. 19 PRODUCTIVIDAD DEL SISTEMA EJEMPLO En los últimos doce meses se ha recolectado información del indicador de cargas dañadas. Los valores obtenidos se tienen en la tabla adjunta. a. ¿Está bajo control ese indicador? b. ¿Qué valor se proyecta para enero del año siguiente? PROFESOR: DR. JORGE ACUÑA A. 20 10 PRODUCTIVIDAD DEL SISTEMA EJEMPLO Mes E Cargas dañadas 9 245 Cargas totales F 8 324 M 5 235 A 35 290 M 6 300 J 10 435 J 8 256 A 5 340 S 6 200 O 6 389 PROFESOR: DR. JORGE ACUÑA A. N 5 312 D 3 280 21 PRODUCTIVIDAD DEL SISTEMA a. EJEMPLO Control del indicador Mes E F M A M J J A S O N D 9 8 5 35 6 10 8 5 6 6 5 3 Cargas dañadas 245 324 235 290 300 435 256 340 200 389 312 280 Cargas totales Indicador 0,037 0,025 0,021 0,121 0,02 0,023 0,031 0,015 0,03 0,015 0,016 0,011 Promedio Desviación estándar 3s LSC LIC 0,03 0,029 0,088 0,119 -0,06 PROFESOR: DR. JORGE ACUÑA A. 22 11 PRODUCTIVIDAD DEL SISTEMA EJEMPLO VALOR DEL INDICADOR GRAFICO DEL INDICADOR 0,140 0,120 0,100 0,080 0,060 0,040 0,020 0,000 E F M A M J J A S O N D M ES PROFESOR: DR. JORGE ACUÑA A. 23 PRODUCTIVIDAD DEL SISTEMA EJEMPLO Es evidente que el dato del mes de abril corresponde a una situación especial que deja al indicador con un comportamiento extraño. Debe investigarse la causa de ello pues no debe ocurrir en el futuro. Si se elimina ese dato se tiene: Promedio Desviación estándar 3s LSC LIC 0,022 0,008 0,024 0,046 -0 PROFESOR: DR. JORGE ACUÑA A. 24 12 PRODUCTIVIDAD DEL SISTEMA EJEMPLO VALOR DEL INDICADOR GRAFICO DEL INDICADOR 0,050 0,040 0,030 0,020 0,010 0,000 E F M M J J A S O N D MES PROFESOR: DR. JORGE ACUÑA A. 25 PRODUCTIVIDAD DEL SISTEMA EJEMPLO Es evidente que el dato del mes de abril era especial pues ahora el indicador refleja una tendencia de decrecimiento, lo caul es favorable en este caso. b. Para contestar la pregunta b. se aproximará una línea de regresión para estimar el valor del mes de enero siguiente. PROFESOR: DR. JORGE ACUÑA A. 26 13 PRODUCTIVIDAD DEL SISTEMA EJEMPLO b. Para contestar la pregunta b. se aproximará una línea de regresión para estimar el valor del mes 12. m= b= -0,00155 0,0315 Sea que el valor proyectado para enero es: y= 0.0315-12*0,00155= 0.0129 PROFESOR: DR. JORGE ACUÑA A. 27 COSTOS DE OPERACION EJEMPLO El costo de un montacargas es de $20000 y tiene una vida esperada de 5 años. El costo del combustible es de $10 por 8 horas de trabajo y el costo de mantenimiento es de $1.50 por hora. Las fallas ocurren en promedio cada 2 horas. Si se recorren en promedio 3048 metros por día determinan el costo de operación por metro recorrido. Se trabajan 360 días al año y al operador del montacargas se le pagan $10 por hora. PROFESOR: DR. JORGE ACUÑA A. 28 14 COSTOS DE OPERACION SOLUCION Costo de operación / metro = $ 0 .0122 cos to / hora $ 4 .64 / hora = = metros / hora 381 metros / hora metro Costo / hora = mantenimie nto + combustibl e + depreciaci ón + operador día metros 3048 metros Dis tan cia recorrida / hora = * = 381 día hora 8 horas $ 20000 1 año 1 día $ 1 .39 Depreciaci ón = * * = hora 5 años 360 días 8 horas Combustibl e = Operador = $ 10 $ 1 .25 = 8 horas hora $ 10 $ 1 .25 = 8 horas hora $ 1 .5 $ 0 .75 = 2 hora $ 4 .64 Costo / hora = hora Mantenimie nto = PROFESOR: DR. JORGE ACUÑA A. 29 HP DE MOTORES PARA BANDAS TRANSPORTADORAS NOMENCLATURA hp: requerimiento de caballaje s: velocidad de la banda en pies/min (fpm) L: carga a ser transportada en libras TL: longitud total de la banda en pies RC: espacio entre líneas centrales de rodillos en pulgadas WBR: ancho entre rieles en pulgadas α: ángulo de inclinación en grados LLI: carga viva en inclinación en libras (peso del material en la sección de la banda que está inclinada) BV: Valor base FF: factor de fricción LF: factor de longitud PROFESOR: DR. JORGE ACUÑA A. 30 15 CALCULO DE HP PARA MOTORES PARA BANDAS DE FAJA Para obtener BV se aproxima multiplicando WBR por 2/3. El valor de FF es 0.05 si la faja está soportada sobre rodillos y 0.3 si está soportada sobre una cama corrediza. El valor de LF se obtiene de tablas. hp = [ BV + LF * TL + FF * L) + LLI * senα ] * S 14000 PROFESOR: DR. JORGE ACUÑA A. 31 CALCULO DE HP PARA MOTORES PARA BANDAS DE RODILLOS El valor de FF es 0.1 cuando los rodillos están sobre una faja plana, 0.85 si se usa una faja acumulativa de cero presión para potenciar los rodillos, 0.075 cuando una faja V potencia los rodillos y 0.05 cuando los rodillos son potenciados por una cadena. El valor de LF se obtiene de tablas. El valor de BV ser calcula así: BV = 4.6 + 0.445 *WBR hp = [ BV + LF * TL + FF * L + LLI * senα ] * S 14000 PROFESOR: DR. JORGE ACUÑA A. 32 16 CALCULO DE HP PARA MOTORES PARA BANDAS DE FAJA PROFESOR: DR. JORGE ACUÑA A. 33 CALCULO DE HP PARA MOTORES PARA BANDAS DE RODILLOS PROFESOR: DR. JORGE ACUÑA A. 34 17 CALCULO DE HP PARA MOTORES PARA BANDAS DE FAJA EJEMPLO Considere una banda de faja de 100 pies, soportada sobre rodillos e inclinada a un ángulo de 10 grados. El espacio entre los rodillos es de 6 pulgadas y se tiene un WBR de 27 pulgadas. Esta banda se usa para transportar recipientes de piezas que miden 18 pulgadas de ancho y pesan 35 libras (por estabilidad se desea que un mínimo de dos rodillos soporte la carga en plano y tres o mas en inclinación. Se debe dejar un espacio de 12 pulgadas entre recipientes. La velocidad de la banda es de 90 pies por minuto. ¿Cuál es del valor de hp requerido por esta banda? PROFESOR: DR. JORGE ACUÑA A. 35 CALCULO DE HP PARA MOTORES PARA BANDAS DE FAJA SOLUCION Para facilitar el cálculo se definirá el segmento de carga como un recipiente mas el espacio entre recipientes. Por ello la longitud de del segmento de carga es de 30 pulgadas. Así, cabrán 40 segmentos de carga en los 100 pies. Así el peso de la carga será de 40*35=1400 libras. Así: S=90 fpm RC=6 pulg WBR=27 pulg BV= (2/3)27=18 LF=0.61 TL=100 FF=0.05 L=LLI=1400 libras α=10 grados [ BV + LF * TL + FF * L + LLI * senα ] * S hp = 14000 [18 + 0.61*100 + 0.05 *1400 + 1400 * 0.1737] * 90 hp = = 2.52hp 14000 PROFESOR: DR. JORGE ACUÑA A. 36 18 CALCULO DE HP PARA MOTORES PARA BANDAS DE RODILLOS EJEMPLO Considere el mismo ejemplo anterior pero ahora usando una banda de rodillos que es potenciada por una banda V. La distancia entre rodillos es de 3 pulgadas. Además, la inclinación requerida es de apenas 15 grados. PROFESOR: DR. JORGE ACUÑA A. 37 CALCULO DE HP DE MOTORES PARA BANDAS DE RODILLOS SOLUCION S=90 fpm RC=3 pulg WBR=27 pulg LF=2 TL=100 pies FF=0.075 L=LLI=1400 libras α=15 grados BV = 4.6 + 0.445 *WBR BV = 4.6 + 0.445 * 27 = 16.615 [ BV + LF * TL + FF * L + LLI * senα ] * S 14000 [16.615 + 2 *100 + 0.075 *1400 + 1400 * 0.26] * 90 hp = 14000 hp = 4.41 hp = PROFESOR: DR. JORGE ACUÑA A. 38 19 MODELO DEL AGENTE VIAJERO z z z El modelo consiste en seleccionar una ruta que una todas la localidades de tal manera que se minimice o maximize una función de costos, distancias, cargas, tiempos, etc). El modelo consiste en: Minimizar la suma de Cij ’s (costos, distancias, cargas, tiempos, etc) tal que se puedan visitar n-localidades y regresar al punto de partida. Se resuelve usando el modelo de asignación y luego buscando la solución factible por inspección. PROFESOR: DR. JORGE ACUÑA A. 39 MODELO DEL AGENTE VIAJERO Minimizar o maximizar la ∑Cij si se tiene la siguiente matriz de elementos: (Li: localidades) L1 L2 L3 ……………….. Ln C13 ……………….. C1n L2 C21 - C23 ……………….. C2n L3 C31 C32 Ln Cn1 Cn2 ……………….. Cn3 ……………….. C3n …………… - …………… …………… C12 …………… - …………… L1 - PROFESOR: DR. JORGE ACUÑA A. 40 20 MODELO DEL AGENTE VIAJERO z z z z z PROCEDIMIENTO Determinar la matriz de Cij’s. Resolver el problema usando el modelo de asignación. Inspeccionar la solución por su factibilidad, sea si se viaja a través de todas las localidades. Si es factible esa es la solución y es óptima. Si no lo es continuar. Inspeccionar por soluciones factibles cercanas a la óptima. PROFESOR: DR. JORGE ACUÑA A. 41 MODELO DEL AGENTE VIAJERO EJEMPLO Un montacargas debe entregar materiales a cada una de cinco localidades sin que existan restricciones ni prioridades en el tiempo de entrega. Las distancias en metros de viajar de cada localidad a cada localidad se muestran en la matriz adjunta. Establecer la ruta de entrega. PROFESOR: DR. JORGE ACUÑA A. 42 21 MODELO DEL AGENTE VIAJERO EJEMPLO L1 L2 L3 L4 L5 L1 - 2 5 7 1 L2 8 - 3 8 2 L3 8 7 - 4 7 L4 12 4 6 L5 1 3 2 - 5 8 43 PROFESOR: DR. JORGE ACUÑA A. MODELO DEL AGENTE VIAJERO SOLUCION Resta de menor en renglones L1 L2 L3 L4 Resta de menor en columnas L1 L5 L2 L3 L4 L5 L1 ∞ 1 4 6 0 L1 ∞ 1 3 6 0 L2 4 ∞ 1 6 0 L2 4 ∞ 0 6 0 L3 4 3 ∞ 0 3 L3 4 3 ∞ 0 3 L4 8 0 2 ∞ 1 L4 8 0 1 ∞ 1 L5 0 2 1 7 ∞ L5 0 2 0 7 ∞ PROFESOR: DR. JORGE ACUÑA A. 44 22 MODELO DEL AGENTE VIAJERO SOLUCION z z Esta es una solución óptima en asignación, pero no lo es para el problema en cuestión pues no pasa por todas la localidades pues va de 1 a 5 y de 5 a 1. La distancia total recorrida es 1+3+4+1+1=13 metros L1 L2 L3 L4 L5 L1 ∞ 1 3 6 0 L2 4 ∞ 0 6 0 L3 4 3 ∞ 0 3 L4 8 0 1 ∞ 1 L5 0 2 0 7 ∞ 45 PROFESOR: DR. JORGE ACUÑA A. MODELO DEL AGENTE VIAJERO z z SOLUCION Se inspecciona por valores pequeños. En este caso los 1’s. Se aplica la misma técnica de asignación, se se trazan el mínimo número de líneas que pasan por todos los ceros. L1 L2 L3 L4 L5 L1 ∞ 1 3 6 0 L2 4 ∞ 0 6 0 L3 4 3 ∞ 0 3 L4 8 0 1 ∞ 1 L5 0 2 0 7 ∞ PROFESOR: DR. JORGE ACUÑA A. 46 23 MODELO DEL AGENTE VIAJERO SOLUCION z Se inspecciona por valores pequeños. En este caso los 1’s. z Se selecciona el 1. z Se inspecciona el resto de la matriz. z La solución es: L1,L2,L3,L4,L5,L1 z La distancia total recorrida es 2+3+4+5+1=15 metros L1 L2 L3 L4 L5 L1 ∞ 0 2 5 0 L2 4 ∞ 0 6 0 L3 4 2 ∞ 0 3 L4 8 0 1 ∞ 1 L5 0 1 0 7 ∞ PROFESOR: DR. JORGE ACUÑA A. 47 MODELO DEL AGENTE VIAJERO EJEMPLO Se tiene que hacer entregas de materiales a cada una de seis localidades sin que existan restricciones ni prioridades en el tiempo de entrega. Las cargas a enviar en kilos de cada localidad a cada localidad se muestran en la matriz adjunta. Establecer la ruta de entrega que maximize la carga. Asuma que el equipo tiene suficiente capacidad para el envío máximo. PROFESOR: DR. JORGE ACUÑA A. 48 24 MODELO DEL AGENTE VIAJERO EJEMPLO L1 L2 L3 L4 L5 L6 L1 - 10 12 18 24 35 L2 5 - 17 16 23 32 L3 12 16 - 23 50 33 L4 4 34 11 - 60 41 L5 8 56 27 12 - 3 L6 12 12 32 28 32 - PROFESOR: DR. JORGE ACUÑA A. 49 MODELO DEL AGENTE VIAJERO SOLUCION Antes de la resta se deben cambiar los valores por negativos L1 L2 L3 L4 L5 L6 L1 ∞ -10 -12 -18 -24 -35 L2 -5 ∞ -17 -16 -23 -32 L3 -12 -16 ∞ -23 -50 -33 L4 -4 -34 -11 ∞ -60 -41 L5 -8 -56 -27 -12 ∞ -3 L6 -12 -12 -32 -28 -32 ∞ PROFESOR: DR. JORGE ACUÑA A. 50 25 MODELO DEL AGENTE VIAJERO SOLUCION Resta de menor en renglones L1 L2 L3 L4 L5 Resta de menor en columnas L6 L1 L2 L3 L4 L5 L6 L1 ∞ 25 23 17 11 0 L1 ∞ 25 23 13 11 0 L2 27 ∞ 15 16 9 0 L2 7 ∞ 15 12 9 0 L3 38 34 ∞ 27 0 17 L3 18 34 ∞ 23 0 17 L4 56 16 39 ∞ 0 19 L4 36 16 39 ∞ 0 19 L5 48 0 29 44 ∞ 53 L5 28 0 29 40 ∞ 53 L6 20 20 0 4 0 ∞ L6 0 20 0 0 0 ∞ 51 PROFESOR: DR. JORGE ACUÑA A. MODELO DEL AGENTE VIAJERO SOLUCION No hay solución aun se continua con la metodología de asignación L1 L2 L3 L4 L5 L6 L1 ∞ 25 23 13 11 0 L2 7 ∞ 15 12 9 0 L3 18 34 ∞ 23 0 17 L4 36 16 39 ∞ 0 19 L5 28 0 29 40 ∞ 53 L6 0 20 0 0 0 ∞ PROFESOR: DR. JORGE ACUÑA A. 52 26 MODELO DEL AGENTE VIAJERO SOLUCION Esta es una solución óptima en asignación, pero no lo es para el problema en cuestión pues no pasa por todas la localidades pues va de 1 -6 - 3 -1. Carga= 211Kilos L1 L2 L3 L4 L5 L6 L1 ∞ 18 11 1 20 0 L2 0 ∞ 3 0 18 0 L3 0 18 ∞ 2 0 24 L4 18 0 18 ∞ 0 26 L5 26 0 23 35 ∞ 53 L6 3 25 0 0 21 ∞ 53 PROFESOR: DR. JORGE ACUÑA A. MODELO DEL AGENTE VIAJERO SOLUCION z Se inspecciona por valores pequeños. En este caso el 2. z Se selecciona el 2. z Se inspecciona el resto de la matriz. z La solución es: L1,L6,L3,L4,L5,L2, L1 z El peso total de carga es 211 kilos, sea es óptima la solución L1 L2 L3 L4 L5 L6 L1 ∞ 18 11 1 20 0 L2 0 ∞ 3 0 18 0 L3 0 18 ∞ 2 0 24 L4 18 0 18 ∞ 0 26 L5 26 0 23 35 ∞ 53 L6 3 25 0 0 21 ∞ PROFESOR: DR. JORGE ACUÑA A. 54 27