Generación de campos magnéticos senoidales de alta frecuencia
Anuncio

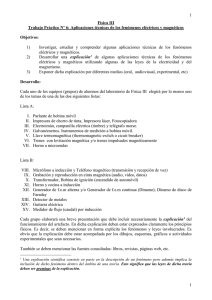
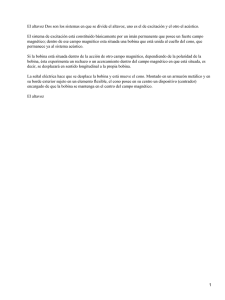
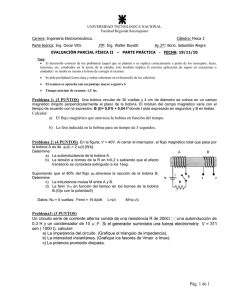
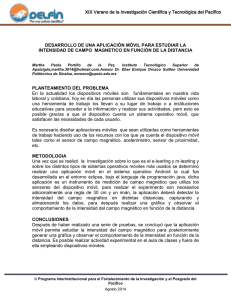
Generación de campos magnéticos senoidales de alta frecuencia para la caracterización de sensores magnéticos. Guillermo Robles José Daniel Muñoz Romano Giannetti Departamento de Electrónica y Automática Universidad Pontificia Comillas de Madrid Alberto Aguilera, 23 28015-España. [email protected] Resumen 3.47 pF En el presente trabajo se presenta un sistema de generación de pulsos magnéticos senoidales para el estudio de la respuesta en frecuencia de un sensor de campo magnético. El dispositivo propuesto, puede generar campos magnéticos de alta frecuencia durante cortos periodos de tiempo, pero que son suficientes para excitar el sensor y poder así obtener su respuesta en frecuencia. CB RB LB 0.986Ω 5.89uH Figura 1. Esquema equivalente de la bobina. 1. Introducción En el estudio de la respuesta en frecuencia de un sensor de campo magnético, es necesario crear un campo patrón para poder calibrarlo. La generación de campos magnéticos está basada en la ley de Ampère que relaciona la circulación de una intensidad por una bobina con el campo magnético asociado. Debido a la relación lineal entre la impedancia inductiva y la frecuencia, ZL = jLω, es necesario utilizar fuentes de tensión de gran potencia para conseguir campos magnéticos de altas frecuencias. En los experimentos previos a este estudio [1], se utilizó una bobina con un radio medio de 5 cm y un espesor de los arrollamientos de 4 cm. La autoinductancia era de L = 100 mH, esto quiere decir que a 10 kHz, presenta una impedancia de 6280 Ω. Para generar un campo magnético de 100 mT es necesario que circule una intensidad de 1A, es decir habría que utilizar una fuente de tensión de más de 6 kV. Una alternativa a las fuentes continuas son los imanes pulsados como los desarrollados en el CERN [2], o los de Los Alamos National Laboratory. Sin embargo, éstos son extremadamente caros y complejos de instalar y utilizar. En el presente trabajo, se presenta un generador de impulsos magnéticos que puede alcanzar frecuencias en la banda de los megahercios, con un montaje muy sencillo y económico. Trabajos similares se han desarrollado para aplicaciones en el campo de los ultrasonidos [3]. 2. Diseño de la bobina La nueva bobina se ha realizado con cable de 0,25 mm de diámetro, formando cuatro capas de espiras de 25 vueltas cada una. El tamaño de la bobina resultante ha sido de 2 cm de largo, 0,7 cm de diámetro exterior y 0,3 cm de diámetro interior. Su esquema equivalente es el mostrado en la figura 1. Al ser un sistema de segundo orden, su frecuencia de resonancia es 35,2 MHz según la ecuación (1), por lo que está suficientemente alejada de la frecuencia máxima de estudio, que es 1 MHz. 1 (1) fr = √ 2π LBCB RPEM 1K + − 0.986Ω CPEM CB RB 1000 uF 3.47 pF LB C1 5.89 uH IRPF460 Trigger RURP3020 Figura 2. Esquema del generador de pulsos magnéticos. Debido a sus características, la bobina no puede soportar grandes intensidades en régimen permanente. Por tanto, es necesario generar impulsos de corriente de corta duración. 3. Esquema del generador Para generar un pulso de corriente, se descarga abruptamente un condensador por la pequeña impedancia que muestra la bobina. El circuito utilizado se muestra en el Esquema 2. El condensador CPEM = 1000 µF se carga a través de la resistencia RPEM = 1 kΩ cuando el transistor está abierto. La constante de tiempo de carga es de τ0 = RPEMCPEM = 1 s. Si se controla el disparo del MOS para cerrarlo y abrirlo en un tiempo mucho menor que la constante de descarga de CPEM , se produce un fenómeno que resulta de suma utilidad. Una vez agotadas las constantes de tiempo τ1 = RMOSCB y τ2 = LB / (RB + RMOS ), circula una intensidad por LB y RB que decrece exponencialmente y que cierra el circuito por la tierra conectada a la fuente del MOS. Si ese camino se abre apagando el MOS, la intensidad debe seguir circulando por alguna vía alternativa porque LB impide su extinción. Se forma entonces un circuito resonante entre LB y CB que hace 60 58 RB VC PEM 56 54 52 50 46 CB LB 48 0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 Tiempo (s) C1 2 −4 x 10 200 Figura 4. El condensador C1 se conecta en paralelo con la bobina. 150 iL (A) 100 50 C1 (nF) 1µF 390 nF 100 nF 39 nF 22 nF 10 nF 0 −50 −100 −150 0 0.2 0.4 0.6 0.8 1 1.2 1.4 Tiempo (s) 1.6 1.8 2 −4 x 10 Figura 3. En la primera gráfica se representa la tensión de CPEM . La segunda gráfica representa la intensidad que circula por la bobina. fr (kHz) 65.6 105 207.4 332.1 442.1 655.7 fosc (kHz) 64.2 104.2 206.9 331.8 441.9 655.5 Tabla 1. Capacidades en paralelo con la bobina para conseguir que oscile a una frecuencia determinada. de donde se deduce: (2) C1 = La raíz cuadrada corresponde al amortiguamiento de la oscilación. Con los valores de la bobina, el factor de amortiguamiento es pequeño y la frecuencia de oscilación es cercana a la frecuencia de resonancia. Se utilizará, por tanto, la ecuación 1 por ser más sencilla. En la figura 3 se representa el comportamiento del circuito de excitación para dos impulsos separados 1ms. La exponencial rápida del primer gráfico comienza cuando se cierra el MOS y el inicio de las oscilaciones coincide con la apertura del transistor. Se pueden generar impulsos senoidales a una frecuencia personalizada modificando la frecuencia de oscilación. Esta libertad de poder variar la frecuencia de la excitación permite caracterizar el sensor magnético comparando la relación de amplitudes y fases entre su salida y la excitación. El método puede parecer un poco laborioso, sin embargo, la respuesta de la electrónica del sensor es supuestamente plana hasta la banda del megahercio, por lo no se esperan cambios bruscos en la respuesta total. De esta manera, escogiendo varias frecuencias desde 50 kHz hasta 1 MHz, se puede obtener una solución completamente satisfactoria. A continuación se muestra cómo hay que modificar el circuito para cambiar fosc . Según (1), fr ∼ fosc depende de LB y CB . La autoinductancia no se puede modificar a no ser que se cambie la bobina en cada experimento, lo que resultaría muy incómodo. Es mucho más sencillo añadir una capacidad en paralelo con la bobina que se sumará a la capacidad CB , según se muestra en la figura 4. 1 −CB (2π fr0 )2 LB En la Tabla 1 se muestran los condensadores necesarios para obtener distintas frecuencias de oscilación. La simulación del sistema se representa en la figura 5. Las oscilaciones en este caso son de 1 MHz, luego el campo magnético generado en la bobina oscilará a la misma frecuencia. Se ha generado un campo magnético de alta intensidad a alta frecuencia que permitirá realizar ensayos de ancho de banda del sensor magnético. Puede resultar interesante prolongar la duración del pulso senoidal de campo magnético. Su ecuación es: iB = Ke R −t 2LB B · sin(2π fosct + φ) fr0 = 1 p 2π LB (CB +C1 ) (3) (5) La constante de tiempo de la exponencial, τ3 = 2LB /RB , es 200 150 100 50 0 −50 −100 −150 0 0.5 1 1.5 2 Tiempo (s) Al aumentar la capacidad total, las frecuencias que se pueden conseguir siempre serán menores que fr y vendrán dadas por: (4) il (A) oscilar a la intensidad con una frecuencia dada por: s 1 1 R2B (CB +C1 ) fosc = p 1− 4 LB 2π LB (CB +C1 ) 2.5 3 3.5 4 −5 x 10 Figura 5. Intensidad que circula por la autoinductancia cuando se cierra el transistor MOS. La frecuencia de la oscilación es de 1 MHz. 100 kHz 1000 Reloj 18 Contador 800 Reset Cmp = 600 Disparo 18 200.000 Tension VDS (V) 400 200 0 −200 Figura 8. Diagrama de bloques de la FPGA. −400 15 10 −800 0 0.5 1 1.5 2 2.5 3 3.5 Tiempo (s) 4 −5 x 10 Entrada (A) −600 5 0 −5 −10 −15 0 Figura 6. Tensión en bornes del transistor MOS. 0.2 0.4 0.6 0.8 1 −4 x 10 0 6kΩ + AD826 −0.5 Vdisparo Salida (V) FPGA − IR-2110 2kΩ −1 −1.5 −2 0 100kHz 0.2 0.4 0.6 0.8 Tiempo (s) 1 −4 x 10 Figura 7. Circuito de disparo. Figura 9. Excitación y medida del campo magnético a 64.2 kHz. la que fija la duración del pulso. Hay dos opciones para alargarla, o bien se disminuye la resistencia del cable con el que se hace la bobina, o bien se aumenta la inductancia LB . Desafortunadamente, ambas posibilidades tienen sendas desventajas. Para disminuir la resistencia RB , se debería aumentar el diámetro del cable, lo que disminuiría el número de vueltas que se pueden dar. Para aumentar LB , habría que aumentar el número de vueltas y la longitud del cable, con lo que aumentaría la resistencia. En definitiva, la relación entre LB y RB es más bien fija y difícil de cambiar. se muestra en la figura 8. Como se puede observar el circuito consta de un contador de 18 bits y un comparador que, cuando el valor del contador es igual a 200.000, genera un pulso de salida que dispara el transistor e inicializa el contador. Debido a que el reset del contador es síncrono, el pulso de salida permanece activo durante un periodo de reloj. El circuito se ha especificado en lenguaje VHDL y el código fuente se muestra en el apéndice A. 3.1. Esquema de disparo del transistor MOS Para poder obtener medidas fiables, es necesario disparar el transistor MOS periódicamente, de forma que puedan tomarse los datos de entrada y salida del sensor y promediarlos. Además, el tiempo que está el transistor MOS encendido debe de ser mucho menor que la constante de tiempo τ3 para evitar que la descarga del condensador sea apreciable. Por último, el transistor debe de estar apagado un tiempo de seguridad para evitar que éste sufra daños por sobretemperatura. Además en este intervalo se volverá a cargar CPEM a su tensión inicial. Siguiendo estas restricciones, el tiempo de encendido ton se ha elegido igual a 10 µs y el periodo de la onda de disparo de 2 s. El circuito de disparo se muestra en la figura 7. Como se puede apreciar, el circuito consta de una FPGA1 que, a partir de un reloj de 100 kHz, genera un pulso cada dos segundos con una duración de un ciclo de reloj. La salida de la FPGA se amplifica para poder así atacar al driver del transistor. Un diagrama de bloques del circuito implantado en la FPGA 1 Se ha usado el modelo MAX7128 de la firma Altera. 4. Resultados experimentales Las figuras 9, 10 y 11 muestran cómo el sensor magnético (gráfico inferior) responde a la excitación (gráfico superior). La salida del sensor está en voltios y señal de excitación, en amperios que circulan por la bobina. El primer pico positivo de las oscilaciones de la corriente corresponde a un campo magnético de 35 mT. Estas figuras dan una idea cualitativa del comportamiento del sensor, a 64,2 kHz prácticamente no hay desfase entre las dos señales. Cerca de 200 kHz, el desfase se hace mucho más evidente porque el sistema de medida tiene un polo en esa frecuencia. Y a 655,7 kHz, el sensor no es capaz de responder adecuadamente a la señal de excitación. Para obtener un resultado más exacto sería necesario ajustar las respuestas obtenidas para cada capacidad C1 con la ecuación (5). De esta manera, se puede calcular el desfase y la relación de amplitudes entre la entrada y salida de una forma precisa. 5. Conclusiones Se ha presentado un dispositivo capaz de generar pulsos magnéticos senoidales a altas frecuencias para el estudio de la respuesta de un sensor magnético, sin necesidad de fuentes de tensión de gran potencia. La frecuencia de oscilación se escoge cambiando el valor de un solo condensador, por lo 20 ENTITY disparo IS PORT( REL :IN BIT; PULSO :OUT BIT); END disparo; Entrada (A) 10 0 −10 −20 −30 0 0.2 0.4 0.6 0.8 1 −4 x 10 0 Salida (V) −0.5 −1 −1.5 −2 0 0.2 0.4 0.6 0.8 1 Tiempo (s) −4 x 10 Figura 10. Excitación y medida del campo magnético a 206.9 kHz. 20 Entrada (A) 10 0 −10 −20 −30 0 0.5 1 1.5 2 2.5 3 3.5 4 −5 x 10 0.5 Salida (V) 0 −0.5 −1 −1.5 0 0.5 1 1.5 2 Tiempo (s) 2.5 3 3.5 4 −5 x 10 Figura 11. Excitación y medida del campo magnético a 655.5 kHz. que este sistema representa un método barato, sencillo y versátil para la generación de campos magnéticos a altas frecuencias. Por último, conviene destacar que el uso de lógica programable ha permitido una gran flexibilidad en el diseño del circuito junto con un notable ahorro de espacio en la placa. Referencias [1] G. Robles and R. Giannetti. Frequency response of a thin cobalt film magneto-optic sensor. In IEEE IMTC 2001 Proceedings, pages 417–421, 2001. G.H. Schröder. Handbook of Accelerator physics and en[2] gineering, chapter Fast pulsed magnet systems. A. Chao and M. Tinger, 1998. [3] J. Salazar, A. Turó, J.A. Chávez, J.A. Ortega, and M. J. García. High-power high-resolution pulser for air-coupled ultrasonic NDE aplications. In 18th IEEE IMTC Proceedings, pages 1756– 1760, may 2001. A. Código fuente del generador de pulsos LIBRARY ieee; USE ieee.std_logic_1164.ALL, ieee.std_logic_arith.ALL; ARCHITECTURE arqdisparo OF disparo IS SIGNAL contador :INTEGER RANGE 0 TO 200000; BEGIN PROCESS (REL) BEGIN IF(REL’EVENT AND REL=’1’) THEN IF contador=200000 THEN PULSO <= ’1’; contador <= 0; ELSE contador <= contador+1; PULSO <= ’0’; END IF; END IF; END PROCESS; END arqdisparo;