Cap_1 Introduccion
Anuncio

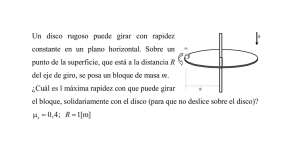
ESTUDIO DE LA ESTABILIDAD DE UN SISTEMA MECÁNICO ARO –BARRA CON LIGADURAS NO HOLÓNOMAS PROYECTO FIN DE CARRERA Capítulo 1. Introducción. 1.1- Antecedentes Históricos. Todos hemos observado en algún momento el curioso movimiento de una moneda girando sobre una mesa. En el caso más simple, mientras la moneda rueda su centro de gravedad se mantiene a una cota constante y va descendiendo paulatinamente. En la etapa final la inclinación del plano de la moneda con la horizontal es prácticamente nula, la velocidad angular del punto de contacto aumenta drásticamente y el giro de la moneda al rodar disminuye. El estudio de este fenómeno tiene sus antecedentes en el siglo XVIII, en los estudios y experimentos sobre dinámica en superficies inclinadas llevados a cabo por Galileo y Coulomb. Sin embargo, estos estudios se limitaban al movimiento de esferas que descendían rodando por una pendiente. Una de las características que presenta un disco al rodar es su inestabilidad en el plano lateral. Bajo la influencia de la gravedad, el disco rueda dirigiéndose hacia el lado en que se produce la inclinación. Presenta un movimiento de precesión giroscópica en torno al eje vertical en tanto en cuanto el movimiento se mantenga, cayendo en caso de pararse. Las primeras investigaciones sobre un disco que rueda sin deslizar sobre una superficie plana horizontal con simetría dinámica, fueron llevados a cabo por G. Slesser (1861), N. Ferrers (1872), K. Neumann (1886) y A. Firkandt (1892). Estos estudios permiten alcanzar, después de varios intentos infructuosos por parte de Neumann y Lindelöf, las correctas expresiones para las ecuaciones de movimiento. Estas ecuaciones difieren de las habituales formas mecánicas de Lagrange o Hamilton en el hecho de que las restricciones no holónomas impuestas muestran que la velocidad del punto del contacto entre el disco y la superficie plana es en todo instante nula. Presentado por: D. Juan de Dios Rey Morillo Página 3 de 77 ESTUDIO DE LA ESTABILIDAD DE UN SISTEMA MECÁNICO ARO –BARRA CON LIGADURAS NO HOLÓNOMAS PROYECTO FIN DE CARRERA S.A. Chaplygin (1897) fue el primero en demostrar la integrabilidad del problema del disco rodante. Presentó en un informe la reducción del problema al análisis de cuadraturas hipergeométricas, en el cual también mostró la integrabilidad del problema de movimiento de un disco que rueda con simetría dinámica sobre un plano horizontal. En este último caso, el problema se reduce a la integración de ecuaciones diferenciales de segundo orden. La integración de las ecuaciones de movimiento del disco en funciones hiperelípticas, fue también presentada en 1900 de manera independiente entre sí y de Chaplygin por P. Appel y D. Korteweg. En 1903 el mismo resultado fue redescubierto por E. Gellop, quién hizo uso de las funciones de Legendre. A pesar de las cuadraturas hipergeométricas explícitas, algunas de las propiedades cualitativas del movimiento de un disco no se estudiaron durante bastante tiempo. Los estudios se centraron en le movimiento estacionario y su estabilidad. Algunas de las propiedades cualitativas se han llegado a comentar en artículos de S.N. Kolesnikov y Yu.N. Fedorov. El primero muestra que para la mayoría de las condiciones iniciales el disco nunca llega a caer, mientras que el segundo presenta el estudio del sistema reducido. Análogos resultados fueron obtenidos para un disco con asimetría dinámica y para un disco moviéndose en un plano inclinado (problemas no integrables). Entre los trabajos modernos que analizan el movimiento rodante del disco se encuentran los correspondientes a O.M. O’Reily, R. Cushman, J. Hermans, D. Kemppainen y A.S. Kuleshov que se centran en el estudio de las bifurcaciones y la estabilidad de movimientos estacionarios del disco. Resultados generales del análisis cualitativo del movimiento de rodadura fueron obtenidos por N.K. Moshuk. Su trabajo incluye análisis de frecuencia, aplicación de teoría KAM y propiedades cualitativas básicas del movimiento del punto de contacto. El punto de contacto realiza un movimiento complejo: traza ciclicamente curvas cerradas que giran como un sólido rígido, con velocidad angular constante, en torno a un punto fijo. Fig 1.1: Disco Rodante inclinado y distintos parámetros. Presentado por: D. Juan de Dios Rey Morillo Página 4 de 77 ESTUDIO DE LA ESTABILIDAD DE UN SISTEMA MECÁNICO ARO –BARRA CON LIGADURAS NO HOLÓNOMAS PROYECTO FIN DE CARRERA 1.2- Modelo del Sistema Dinámico. 1.2.1- Descripción del sistema. El sistema mecánico a investigar en el proyecto consiste en un aro y una barra solidaria al mismo, dispuesta diametralmente al primero, con densidad de masa uniforme para ambas partes y considerando que rueda sin deslizar sobre una superficie plana, sometido exclusivamente a la acción de la gravedad. La elección de este sistema frente al de un disco homogéneo, sin espesor, viene determinada por la posibilidad de comparar el efecto que el tensor de inercia, con momentos de inercia distintos en cada una de la direcciones principales del sistema mecánico en estudio, tendría sobre el conjunto de las ecuaciones diferenciales resultantes. La condición de rodadura sin deslizamiento implica que la velocidad del punto de contacto será nula en todo momento. Este hecho se reflejará mediante la imposición de restricciones no holónomas al sistema. Fig 1.2: Sistema Aro-Barra. Ejes intermedio (2) y local (3). Fig 1.3: Ejes de referencia global (0) e intermedio (1). Presentado por: D. Juan de Dios Rey Morillo Página 5 de 77 ESTUDIO DE LA ESTABILIDAD DE UN SISTEMA MECÁNICO ARO –BARRA CON LIGADURAS NO HOLÓNOMAS PROYECTO FIN DE CARRERA Fig 1.4: Ejes de referencia intermedios (1) y (2). 1.2.2- Esquema y definición de los parámetros. En las figuras 1.2, 1.3 y 1.4 se muestran el esquema del conjunto aro-barra, junto con los parámetros y los ejes de referencia considerados al modelar el sistema. El sistema es definido mediante el vector de posición del punto de contacto C respecto al sistema global de referencia O, y tres ángulos: •ϕ, denominado ángulo de guiñada, es el giro que se produce cuando el punto de contacto cambia su trayectoria en el plano. •θ, ángulo de caída. •ψ, ángulo de rotación del sistema respecto a un eje solidario al mismo, que pasa por el centro de gravedad y que es perpendicular al plano en el que se encuentra contenido el primero. Estos cinco parámetros (ϕ, θ, ψ, xC ,yC ) serán nuestras coordenadas generalizadas (q1, q2, q3, q4, q5). 1.3- Objetivos del Proyecto. El objeto del proyecto es, descrito nuestro sistema como un caso particular o modificado del disco homogéneo sin espesor, obtener las expresiones diferenciales de movimiento a partir de las ecuaciones de Lagrange, considerando la influencia que sobre las expresiones halladas tiene el hecho de que los momentos de inercia sean diferentes en cada uno de los ejes principales de inercia, encontrar los puntos de equilibrio para los movimientos elementales que se consideren y en último lugar, obtener de forma cualitativa información sobre la estabilidad de nuestro sistema. Presentado por: D. Juan de Dios Rey Morillo Página 6 de 77