Filtros Digitales (Curso 2010/11)
Anuncio
")
DISEÑO DE FILTROS
DIGITALES
Filtros Digitales
Algoritmo implementado sobre hardware que opera sobre señales analógicas
digitalizadas o sobre señales digitales almacenadas.
9 VENTAJAS:
• Características imposibles con filtros analógicos (fase lineal)
• No cambian cualquiera que sea el entorno
• Procesamiento de varias señales con un único filtro
• Posibilidad de almacenar datos
• Repetitividad
• Uso en aplicaciones de muy bajas frecuencias
9 INCONVENIENTES:
• Limitación de velocidad
• Efectos de la longitud finita de las palabras
• Tiempos de diseño y desarrollo
Filtros Digitales
- Clasificación de los Filtros Digitales.
- IIR : Respuesta al Impulso Infinita.
M
y[n] =
∞
∑ h[k ]x[n − k ]
k =0
y[n] =
M
N
k =0
k =1
∑ bk x[n − k ] + ∑ ak y[n − k ]
∑ bk z − k
H (z ) = k =0
N
1 − ∑ ak z − k
k =1
- FIR : Respuesta al Impulso Finita.
y[n] =
M
∑ h[k ]x[n − k ]
k =0
h[n] =
M
∑ h[k ]⋅δ[n − k ]
k =0
H (z ) =
M
∑ h[k ]⋅ z − k
k =0
Filtros Digitales
9 PASOS EN EL DISEÑO DE FILTROS:
a. Especificación de las Características del filtro.
b. Cálculo de los Coeficientes. Diferentes métodos.
c. Elección de la Estructura. Realización.
d. Análisis de los Efectos de Precisión Finita.
e. Implementación del filtro mediante software y/o hardware adecuado.
Filtros Digitales
- Especificación de las Características del filtro.
α(dBs ) = 20⋅ log
1
= −20⋅ log ( H (Ω ) )
H( Ω )
α p (dBs ) = −20 ⋅log (1 − δ1 )
α a (dBs ) = −20 ⋅log (δ 2 )
⎛ 1− δ p ⎞
⎟
rp (dBs ) = −20⋅ log⎜
⎜1+ δ p ⎟
⎝
⎠
α a (dBs ) = −20⋅ log (δ a )
( Atenuación
( Atenuación
máxima en la banda de paso )
mínima en la banda e lim inada )
(rizado en la banda de
paso )
( Atenuación mínima en la banda e lim inada )
RELACIÓN SISTEMAS CONTINUOS - SISTEMAS DISCRETOS (I)
⎧
⎪ H (Ω ) Ω =ωTs
⎪
H eff (ω) = ⎨
⎪0
⎪⎩
H (Ω ) = H eff (ω)
;
ω<
π
Ts
ó
ω
ω< s
2
;
ω>
π
Ts
ó
ω
ω> s
2
Ω = H eff
ω=
Ts
⎛Ω⎞
⎜⎜ ⎟⎟
⎝ Ts ⎠
;
Ω <π
RELACIÓN SISTEMAS CONTINUOS - SISTEMAS DISCRETOS (II)
Bloque A/D:
xs (t ) = xc (t ) ⋅ s(t ) = xc (t ) ⋅
xs (t ) =
∞
∑ δ(t − nTs )
n = −∞
∞
∑ xc (nTs ) ⋅ δ(t − nTs )
n = −∞
X (Ω ) =
F
∞
∑ x[n]⋅ e − jΩn
F
∞
1
X s (ω) = ⋅ ∑ X c (ω − kωs )
Ts k =−∞
X s (ω) =
X s (ω) =
n = −∞
X (Ω ) = X s (ω) ω= Ω
Ts
∞
∑ xc (nTs ) ⋅ e − jωnTs
n = −∞
∞
∑ xc (nTs ) ⋅ e − jωnTs
n = −∞
∞
∞
⎛ Ω 2πk ⎞
1
⎟⎟
= ⋅ ∑ X c (ω − kωs )
= ∑ X c ⎜⎜ −
Ts k = −∞
Ω
⎝ Ts Ts ⎠
k = −∞
ω=
Ts
RELACIÓN SISTEMAS CONTINUOS - SISTEMAS DISCRETOS (III)
Bloque D/A:
Y (Ω ) =
∞
∑ y[n]⋅ e − jΩn
n = −∞
Ys (ω) =
∞
∑ ys (nTs ) ⋅e
n = −∞
− jω nTs
∞
∑ y[n]⋅ e − jω nTs
=
n =−∞
Ys (ω) = Y (Ω) Ω=ωT
s
Yc (ω) = Ys (ω) ⋅ H r (ω) = H r (ω) ⋅ Y (Ω) Ω=ωT
s
RELACIÓN SISTEMAS CONTINUOS - SISTEMAS DISCRETOS (IV)
⎛ Ω 2πk ⎞
1 ∞
⎟
Y (Ω) = H (Ω) ⋅ X (Ω ) = H (Ω) ⋅ ⋅ ∑ X c ⎜⎜ −
Ts k =−∞ ⎝ Ts Ts ⎟⎠
Ys (ω) = Y (Ω) Ω=ωT = H (Ω) Ω=ωT
s
s
1 ∞
⋅ ⋅ ∑ X c (ω − kωs )
Ts k =−∞
Yc (ω)= H r (ω) ⋅ Ys (ω) = H r (ω) ⋅ H (Ω) Ω=ωT
s
⎧
⎪ X c (ω) ⋅ H (Ω ) Ω=ωTs
⎪
Yc (ω) = ⎨
⎪0
⎪⎩
;
;
ω<
π
Ts
ω>
π
Ts
ó
ó
⎧
⎪ H (Ω ) Ω =ωTs
⎪
H eff (ω) = ⎨
⎪0
⎪⎩
1 ∞
⋅ ⋅ ∑ X c (ω − kωs )
Ts k =−∞
ω
ω< s
2
Yc (ω) = H eff (ω) ⋅ X c (ω)
ω
ω> s
2
;
ω<
π
Ts
ó
ω
ω< s
2
;
ω>
π
Ts
ó
ω
ω> s
2
RELACIÓN SISTEMAS CONTINUOS - SISTEMAS DISCRETOS (V)
Ejemplo: Obtener la plantilla de un filtro digital que se va a utilizar para realizar un
filtrado paso bajo de una señal continua, utilizando la estructura de la figura anterior, con
las siguientes características:
0,99 < H eff (ω) < 1,01 ;
0 ≤ ω ≤ 2π ⋅ 2000 rad / s
H eff (ω) < 0,001
ω ≥ 2π ⋅ 3000 rad / s
;
El periodo de muestreo será Ts = 10-4 segundos.
RELACIÓN SISTEMAS CONTINUOS - SISTEMAS DISCRETOS (VI)
Ω = ω ⋅ Ts
δ p = 0,01
⇒
δ a = 0,001
⇒
ω p = 2π ⋅ 2000
ωa = 2π ⋅3000
20⋅ log(1 + δ p ) = 0,086 dB
20 ⋅log(δ a ) = −60 dB
Ω p = ω p ⋅ Ts = 2π⋅ 2000 ⋅10 −4 = 0,4π rad .
Ω a = ωa ⋅ Ts = 2π ⋅3000 ⋅10 − 4 = 0 ,6π rad .
DISEÑO DE FILTROS
DIGITALES IIR
DISEÑO DE FILTROS IIR A PARTIR DE FILTROS ANALÓGICOS
⎧s ↔ z
⎪
7
SIMILITUDES CON LOS ANALÓGICOS ⇒ RELACIÓN ⎨
⎪ω ↔ Ω
⎩
PROCESO:
ESPECIFICACIONES FILTRO DIGITAL
↓
ESPECIFICACIONES FILTRO ANALÓGICO
↓
FUNCIÓN DE TRANSFERENCIA ANALÓGICA H(s)
↓
FUNCIÓN DE SISTEMA H(z)
-Aproximación por derivadas
-Respuesta al impulso invariante.
- Transformación bilineal.
APROXIMACIÓN POR DERIVADAS (I)
Filtro Analógico:
N
∑ αk ⋅
k =0
d k y( t )
dt
k
=
M
d k x( t )
k =0
dt k
∑ βk ⋅
Transformación:
dy( t )
y (nT ) − y (nT − T ) y[n] − y[n − 1]
=
≡
dt t =nT
T
T
H ( z ) = H (s )
⎛⎜ 1− z −1 ⎞⎟
⎝
⎠
s=
T
Restringido a filtros paso bajo y paso banda con frecuencias de corte bajas
APROXIMACIÓN POR DERIVADAS (II)
Ejemplo:
H( s ) =
1
(s + 0,1)2 + 9
T2
(
1 + 0,2T + 9,01T 2 )
=
H (z ) =
2
2(1 + 0,1T )
1
⎞
⎛ 1 − z −1
z −1 +
z −2
1−
2
2
⎜
+ 0,1⎟ + 9
(
)
(
)
1
+
0
,
2
+
9
,
01
1
+
0
,
2
+
9
,
01
T
T
T
T
⎟
⎜ T
⎠
⎝
1
Módulo de la respuesta en frecuencia del filtro analógico
1
Módulo de la respuesta en frecuencia del filtro digital
0
10
10
0
10
-1
T1
|H(Ω )| (dBs)
|H(ω)| (dBs)
10
-1
10
T2
-2
10
T3
-2
10
T4
1/T3
-3
10
0
1
2
1/T1
1/T2
3
4
5
ω/π (rad/s)
-3
6
7
8
9
10
1/T4
10
0
0.1
0.2
0.3
0.4
0.5
Ω /π (rad)
0.6
0.7
0.8
0.9
1
RESPUESTA AL IMPULSO INVARIANTE (I)
CONCEPTO: Obtener la Respuesta Impulsiva del Filtro Discreto Muestreando la de un Filtro Continuo
h[ n] = Td hc( nTd ) ⇒
H(Ω) =
⎛ Ω 2πk ⎞
H
−
⎟
∑
c⎜
T
k =−∞
⎝ d Td ⎠
∞
Ω = ω Td
⎛Ω⎞
H ( Ω ) = Hc ⎜ ⎟
⎝ Td ⎠
∀
Ω <π
−3π
−2π
H c ( ω) = 0 ∀
H ( ω)
−
−4π
SIEMPRE QUE
π
Td
−π
H (Ω)
ω≥
π
Td
ω
π
Td
π
2π
3π
4π
Ω
RESPUESTA AL IMPULSO INVARIANTE (I)
CONCEPTO: Obtener la Respuesta Impulsiva del Filtro Discreto Muestreando la de un Filtro Continuo
h[ n] = Td hc( nTd ) ⇒
H(Ω) =
⎛ Ω 2πk ⎞
H
−
⎟
∑
c⎜
T
k =−∞
⎝ d Td ⎠
∞
Ω = ω Td
⎛Ω⎞
H ( Ω ) = Hc ⎜ ⎟
⎝ Td ⎠
∀
Ω <π
π
−
Td
−4π
− 3π
−2 π
SIEMPRE QUE
H ( ω)
H (Ω )
−π
H c ( ω) = 0 ∀
ω≥
π
Td
ω
π
Td
π
2π
3π
4π
Ω
RESPUESTA AL IMPULSO INVARIANTE (II)
SUPONEMOS OBTENIDA:
N
H c (s ) = ∑
k =1
Ak
s − sk
OBTENCIÓN DE LA TRANSFORMADA INVERSA DE LAPLACE
⎧N
A k esk t , ∀ t ≥ 0
⎪k∑
=1
hc ( t ) = ⎨
, ∀ t<0
⎪0
⎩
N
MUESTREANDO hc (t) SE OBTIENE:
h[ n] = ∑ Td A k esk nTd u[ n]
k =1
N
APLICANDO TRANSFORMADA Z:
H(z ) = ∑
k =1
Td A k
1 − es k Td z −1
RESPUESTA AL IMPULSO INVARIANTE (III)
N
Hc ( s ) = ∑
k =1
Ak
s − sk
N
→ H (z) = ∑
k =1
PLANO S
POLOS
sk
COEFICIENTES
Ak
ESTABILIDAD
Re{sk } < 0
Td A k
1 − eskTd z −1
PLANO Z
eTd sk
Td Ak
Td Re{sk }
e
<1
RESPUESTA AL IMPULSO INVARIANTE (IV)
Ejemplo: Convertir el filtro analógico con función de transferencia:
H c (s ) =
1
(s + 0.1)2 + 9
en un filtro IIR digital aplicando la invarianza al impulso.
1
1
j
j
6
6
H c (s ) =
−
s + 0 .1 + 3 j s + 0 .1 − 3 j
s p = −0.1 ± 3 j
H (z ) =
Td
1
j
6
Td
1
j
6
−
(
− 0.1−3 j )Td −1
1− e
z
1 − e(−0.1+3 j )Td z −1
1
Td e −0.1Td ⋅ sen(3Td ) ⋅ z −1
3
H (z ) =
−0.1Td
1 − 2e
⋅ cos(3Td ) ⋅ z −1 + e −0.2Td z −2
RESPUESTA AL IMPULSO INVARIANTE (V)
|H(ω)| (dBs)
10
10
10
Módulo de la respuesta en frecuencia del filtro digital
1
10
T1
0
0
10
|H(Ω )| (dBs)
10
Módulo de la respuesta en frecuencia del filtro analógico
1
-1
-1
10
T2
-2
-2
T3
10
T4
10
1/T3
-3
0
1
2
1/T1
1/T2
3
4
5
ω/ π (rad/s)
-3
10
6
7
8
9
10
1/T4
0
0.1
0.2
0.3
0.4
0.5
Ω /π
0.6
0.7
0.8
0.9
1
TRANSFORMACIÓN BILINEAL (I)
H (s )⎫
⎬
s
⎭
Tansformación
⎯⎯ ⎯ ⎯ ⎯ ⎯
⎯→
⎧H (z )
⎨
⎩z
2 re jΩ − 1 2
⋅
=
s = σ + jω =
Td re jΩ + 1 Td
2 ⎛ 1 − z −1 ⎞ 2
s= ⎜
⎟=
Td ⎝ 1 + z −1 ⎠ Td
⎛ z −1 ⎞
⎜
⎟
⎝ z +1⎠
Td
s
2
z=
T
1− d s
2
1+
⎛
⎞
r 2 −1
2rsenΩ
⎜
⎟
⋅
+j
2
2
⎜
1 + r + 2r cos Ω ⎟⎠
⎝ 1 + r + 2r cos Ω
Exterior Circunferencia Unidad
Semiplano
Izquierdo
Semiplano
Derecho
Eje Imaginario
Interior Circunferencia Unidad
Circunferencia Unidad
TRANSFORMACIÓN BILINEAL (II)
Relación Eje Imaginario Plano “s” ↔ Circunferencia Unidad Plano “z”
ω
2 ⎛ z −1 ⎞
s= ⎜
⎟
Td ⎝ z + 1 ⎠
Ω
2
jω =
Td
⎡ e jΩ − 1 ⎤
⎢ jΩ ⎥
⎣ e + 1⎦
ω=
2
Ω
tg
Td
2
Ω = 2 arctg
ωTd
2
TRANSFORMACIÓN BILINEAL (III)
Relación NO LINEAL ω ↔ Ω
H c ( ω)
H( e jΩ )
TRANSFORMACIÓN BILINEAL (IV)
Relación NO LINEAL ω ↔ Ω
s = jω
e −αs ⎯⎯⎯
→ e −α jω ⇒ ϕ ( ω) = −α ω ( FASE LINEAL)
e
− jα
2 Ω
tg
Td 2
⇒ Φ ( Ω ) = −α
2 Ω
tg
( Fase NO LINEAL)
Td 2
Arg[ H( e jΩ )]
2πα
Td
πα
Td
−
πα
Td
−
2πα
Td
−
−
α
Ω
Td
2α ⎛ Ω⎞
tg
Td ⎝ 2 ⎠
TRANSFORMACIÓN BILINEAL (V)
Ejemplo 1: Convertir el filtro analógico con función de transferencia:
H a (s ) =
1
(s + 0.1)2 + 9
en un filtro IIR digital mediante la transformación bilineal.
2
s=
Td
H (z ) =
⎛ 1 − z −1 ⎞
⎟
⋅⎜
⎜ 1 + z −1 ⎟
⎝
⎠
1
⎛
⎜ 2
⎜ Td
⎝
2
⎞
⎛ 1 − z −1 ⎞
⎜
⎟
⋅
+ 0.1⎟ + 9
⎜ 1 + z −1 ⎟
⎟
⎝
⎠
⎠
TRANSFORMACIÓN BILINEAL (VI)
Módulo de la respuesta en frecuencia del filtro digital
1
Módulo de la respuesta en frecuencia del filtro analógico
1
10
10
T4
T2
T3
T1
0
10
0
|H(Ω )| (dBs)
|H(ω)| (dBs)
10
-1
10
-1
10
-2
10
-2
10
-3
10
1/T3
-3
10
0
1
2
1/T1
1/T2
3
4
5
ω/π (rad/s)
-4
10
6
7
8
9
10
1/T4
0
0.1
0.2
0.3
0.4
0.5
Ω /π (rad)
0.6
0.7
0.8
0.9
1
TRANSFORMACIÓN BILINEAL (VII)
Ejemplo 1: Convertir el filtro analógico con función de transferencia:
s + 0.1
H a (s ) =
(s + 0.1)2 + 16
en un filtro IIR digital mediante la transformación bilineal. El filtro digital debe tener
un polo a la frecuencia Ωr = π 2
s p = − 0 .1 ± j 4
ωi =
⇒ ωr = 4
2 Ωi
2 π 2
⇒ 4 = tg
tg
2
Td 2
Td
⇒ Td =
1
2
⎛ 1 − z −1 ⎞
⎟
s = 4⎜
−
1
⎜1 + z ⎟
⎠
⎝
H (z ) =
⎛ 1 − z −1 ⎞
⎟ + 0 .1
4⎜
⎜ 1 + z −1 ⎟
⎝
⎠
2
⎛ ⎛ 1 − z −1 ⎞
⎞
⎜ 4⎜
⎟ + 0.1⎟ + 16
⎜ ⎜ 1 + z −1 ⎟
⎟
⎠
⎝ ⎝
⎠
=
0.125 + 6.09610−3 z −1 − 0.119 z − 2
1 + 6.09610− 4 z −1 + 0.952 z − 2
TRANSFORMACIÓN BILINEAL (VIII)
Módulo de la respuesta en frecuencia del filtro analógico
1
10
0
0
10
|H(Ω )| (dBs)
|H(ω)| (dBs)
10
-1
10
-2
-1
10
-2
10
10
-3
10
Módulo de la respuesta en frecuencia del filtro digital
1
10
-3
0
1
2
3
4
5
ω
6
7
8
9
10
10
0
0.5
1
1.5
2
Ω
2.5
3
3.5
EJEMPLO (I)
Diseñar un filtro digital paso bajo aplicando la respuesta al impulso invariante y la
transformación bilineal a un filtro de Butterworth. Las especificaciones del filtro
digital son:
⎧⎪0,89125 ≤ H (Ω ) ≤ 1
⎨
⎪⎩ H (Ω ) ≤ 0,17783
;
0 ≤ Ω ≤ 0,2π
;
0,3π ≤ Ω ≤ π
⎧α (Ω ) = −20 ⋅log H (Ω )
⎪
;
⎨0 ≤ α (Ω ) ≤ 1 dB
⎪
;
⎩α (Ω ) ≥ 15 dB
0 ≤ Ω ≤ 0,2π
0,3π ≤ Ω ≤ π
EJEMPLO (II)
Obtención de la plantilla del filtro paso bajo prototipo analógico:
a) Respuesta al Impulso Invariante
ω=
Ω
Td
b) Transformación Bilineal
ω=
2
⎛Ω⎞
⋅ tg ⎜ ⎟
Td
⎝2⎠
EJEMPLO (III)
a) Respuesta al Impulso Invariante:
2
H a (ω) =
Diseño del Filtro de Butterworth
2
⎧ ⎛ 0,2π T ⎞ 2 N
1
⎛
⎞
d
⎪1 + ⎜⎜
⎟⎟
=⎜
⎟
ω
⎪ ⎝
⎝ 0,89125 ⎠
c ⎠
⎪
⎨
⎪
2N
2
⎪ ⎛ 0,3π Td ⎞
⎛ 1 ⎞
⎟⎟
=⎜
⎟
⎪1 + ⎜⎜ ω
0
17783
,
⎝
⎠
⎝
⎠
c
⎩
1
⎛ ω⎞
1 + ⎜⎜ ⎟⎟
⎝ ωc ⎠
0,70474 0,22433π
⎧
ω
=
=
⎪ c
T
Td
⎨
d
⎪ N = 5,88
⎩
2N
ωc =
N =6
0,7087 0,2256π
=
Td
Td
Distribución de raíces:
s1 =
− 0.1834 ± j 0,6845
Td
s2 =
− 0.5011 ± j 0,5011
Td
s3 =
− 0.6845 ± j 0,1834
Td
EJEMPLO (IV)
a) Respuesta al Impulso Invariante:
H a (s ) =
Diseño del Filtro de Butterworth
k
(s 2 + 0,3668s + 0,5022)⋅ (s 2 + 1,0022s + 0,5022)⋅ (s 2 + 1,3690s + 0,5022)
H a (0 ) = 1
H a (s ) =
⇒
k = 0 ,1266
0,1266
s 6 + 2,7380 s 5 + 3,7484 s 4 + 3,2533s 3 + 1,8824 s 2 + 0,6905 s + 0,1266
H a (s ) =
0,1447 − j 0,2505
0,1447 + j 0,2505
+
+
s + 0,1834 + j 0,6845 s + 0,1834 − j 0,6845
+
− 1,0797
− 1,0797
+
+
s + 0,5011 + j 0,5011 s + 0,5011 − j 0,5011
+
0,9351 + j1,6196
0,9351 − j1,6196
+
s + 0,6845 + j 0,1834 s + 0,6845 − j 0,1834
EJEMPLO (V)
a) Respuesta al Impulso Invariante:
Obtención del Filtro Digital
N
Td A k
H ( z) = ∑
k =1 1 − e
H (z ) =
0,1447 − 0,2505 j
1− e
+
+
H (z ) =
−0,1834 − j 0,6845 −1
e
−0,5011 − j 0,5011 −1
e
0,9351 + 1,6196 j
+
z
− 1,0797
1− e
sk Td −1
z
0,1447 + 0,2505 j
1− e
+
z
+
−0,1834 j 0,6845 −1
e
+
z
− 1,0797
1 − e −0,5011e j 0,5011z −1
+
0,9351 − 1,6196 j
1 − e −0,6845e − j 0,1834 z −1 1 − e −0,6845e j 0,1834 z −1
0,0007z −1 + 0,0105 z −2 + 0 ,0167 z −3 + 0 ,0042 z −4 + 0 ,001z −5
1 − 3,3443z −1 + 5,0183z −2 − 4,2190 z −3 + 2,0725 z −4 − 0 ,5600 z −5 + 0 ,0647 z −6
EJEMPLO (VI)
b) Transformación bilineal:
2
H a (ω) =
1
⎛ ω⎞
1 + ⎜⎜ ⎟⎟
⎝ ωc ⎠
2N
Diseño del Filtro de Butterworth
⎧ ⎛ 2
⎪ ⎜
⎪1 + ⎜ Td
⎪ ⎜
⎪ ⎜
⎪ ⎝
⎨
⎪ ⎛ 2
⎪ ⎜
⎪1 + ⎜ Td
⎪ ⎜
⎪ ⎜
⎩ ⎝
⎛ 0 ,2π ⎞ ⎞
tg ⎜
⎟⎟
⎝ 2 ⎠⎟
⎟
ωc
⎟
⎠
⎛ 0 ,3π ⎞ ⎞
tg ⎜
⎟⎟
⎝ 2 ⎠⎟
⎟
ωc
⎟
⎠
2N
⎛ 1 ⎞
=⎜
⎟
⎝ 0 ,89125 ⎠
2
0,7662 0,2439π
⎧
ω
=
=
⎪ c
T
Td
⎨
d
⎪N = 6
⎩
2N
⎛ 1 ⎞
=⎜
⎟
⎝ 0 ,17783 ⎠
2
Distribución de raíces:
H a (s ) =
s1 =
− 0.7401 ± j 0,1983
Td
s2 =
− 0.5418 ± j 0,5418
Td
s3 =
− 0.1983 ± j 0,7401
Td
0,2024
s 6 + 2,9605s 5 + 4,3822 s 4 + 4,1124 s 3 + 2,5728 s 2 + 1,0205s + 0,2024
EJEMPLO (VII)
b) Transformación bilineal:
Obtención del Filtro Digital
H ( z ) = H a (s )
H (z ) =
2 1− z −1
s= ⋅
Td 1+ z −1
0,0007 + 0,0044z −1 + 0,0111z −2 + 0,0148 z −3 + 0,0111z −4 + 0,0004 z −5 + 0,007 z −6
1 − 3,1836z −1 + 4,6222 z −2 − 3,7795 z −3 + 1,8136 z −4 − 0,4800 z −5 + 0,0544 z −6
MATLAB
a) Respuesta al Impulso Invariante
[N,wc]=buttord(0.2*pi,0.3*pi,1,15,’s’);
[B,A]=butter(N,wc,’s’);
[R,P,K]=residue(B,A);
[Bz,Az]=impinvar(B,A,Fs);
b) Transformación bilineal:
[N,wc]=buttord(2*tan(0.1*pi),2*tan(0.15*pi),1,15,’s’);
[B,A]=butter(N,wc,’s’);
[Bz,Az]=bilinear(B,A,Fs);
EJEMPLO (VIII)
Módulo de la respuesta en frecuencia del filtro digital
1
0.8
|H(Ω )|
Bilineal
R.I.Inv.
0.6
0.4
0.2
0
0
0.5
1
1.5
2
Ω
2.5
3
3.5
EJEMPLO (IX)
Respuesta al Impulso Invariante
Módulo de la respuesta en frecuencia del filtro analógico prototipo
Módulo de la respuesta en frecuencia del filtro digital
1
1
Td=1
0.8
0.8
Td=1
Td=4
Td=0,2*π
0.6
|H(Ω )|
|H(ω)|
Td=4
0.4
0.4
0.2
0.2
0
0
0.5
1
1.5
2
ω
2.5
3
3.5
Td=0,2*π
0.6
0
0
0.5
1
1.5
2
Ω
2.5
3
3.5
TRANSFORMACIONES DE FILTROS DISCRETOS (I)
Procedimientos:
1.- Transformación en frecuencias en tiempo continuo.
2.- Transformación en frecuencias en tiempo discreto.
TRANSFORMACIONES DE FILTROS DISCRETOS (II)
Transformación en frecuencias en tiempo continuo.
1.- Transformación paso bajo a paso bajo:
⎛ω
p
s →
s
⇒ H PB (s ) → H ' PB (s ) = H PB ⎜
⎜ ω'
ω'p
⎝ p
2.- Transformación paso bajo a paso alto:
ωp
s
→
ω p ⋅ ω'p
s
⎞
s⎟
⎟
⎠
⎛ ω ⋅ ω'p ⎞
p
⎟
H PB (s ) → H PA (s ) = H PB ⎜
⎟
⎜
s
⎝
⎠
⇒
3.- Transformación paso bajo a paso banda:
s
→ ωp ⋅
s 2 + ω+ p ⋅ ω− p
(
s ⋅ ω+ p − ω − p
)
⇒
⎛
s 2 + ω+ p ⋅ ω− p ⎞⎟
⎜
H PB (s ) → H PBd (s ) = H PB ω p ⋅
⎜
s ⋅ ω+ p − ω− p ⎟
⎝
⎠
(
4.- Transformación paso bajo a banda Eliminada:
s
(
)
s ⋅ ω + p − ω− p
→ ωp ⋅
s 2 + ω+ p ⋅ ω− p
⇒
(
)
)
⎛
s ⋅ ω+ p − ω− p ⎞⎟
⎜
H PB (s ) → H BE (s ) = H PB ω p ⋅
2
⎟
⎜
ω
s
+
ω
⋅
+
p
−
p
⎝
⎠
ω+ p ≡ Pulsación de corte sup erior
ω− p ≡ Pulsación de corte inf erior
TRANSFORMACIONES DE FILTROS DISCRETOS (III)
Transformación en frecuencias en tiempo discreto.
( )
z' −1 = G z −1
⇒
( )
H ( z ) = H PB ( z' ) z' −1 =G z −1
9 G(z-1) debe ser función racional en z-1.
9 El interior de la circunferencia unidad en el plano z se debe
transformar en el interior del circunferencia unidad en el plano z´.
9 La circunferencia unidad en el plano z se debe transformar en la
circunferencia unidad en el plano z’.
Constantinides (1970):
z − a *k
z ' = ±∏
k =1 1 − a k z
N
↔
−1
z
− ak
z '−1 = ±∏
* −1
k =1 1 − a k z
N
TRANSFORMACIONES DE FILTROS DISCRETOS (IV)
Ejemplo: Paso Bajo - Paso Bajo
z − a*
z' = ±
1 − az
A’ ↔ A
1 − a*
1= e
1− a
1 − a = e jπm (1 − a * )
jπm
1 − a = e jπm − a *e jπm
1 − e jπm = a − a *e jπm
C’ ↔ C
Para determinar α :
−1 − a
1+ a
1 + a = e jπm (1 + a * )
−1 = e jπm
*
1 + a = e jπm + a *e jπm
1− e
jπm
z−α
z' =
1− α z
m=0 ; a = α (Real)
* jπm
= −a + a e
B’ ↔ B
e
j θp
=
⎛ Ωp − θ p ⎞
sen ⎜
⎟
⎝ 2 ⎠
α=
⎛ Ωp + θ p ⎞
sen ⎜
⎟
⎝ 2 ⎠
e
j Ωp
−α
1− α e
j Ωp
TRANSFORMACIONES DE FILTROS DISCRETOS (V)
TIPO
FILTRO
TRANSFORMACIÓN
PASO
BAJO
z' −1 =
z −1 − α
1 − αz −1
FÓRMULAS
ASOCIADAS
⎛ Ωp − θ p ⎞
sen ⎜
⎟
⎝ 2 ⎠
α=
⎛ Ωp + θ p ⎞
sen ⎜
⎟
⎝ 2 ⎠
Ωp = frecuencia de corte desada
PASO
ALTO
z' −1 = −
z −1 + α
1 + αz −1
⎛ θp
cos ⎜
⎝
α=−
⎛ θp
cos ⎜
⎝
+ Ωp ⎞
⎟
2 ⎠
− Ωp ⎞
⎟
2 ⎠
Ωp = frecuencia de corte desada
PASO
BANDA
2αk −1 k − 1
z +
k +1
k +1
z' −1 =
k − 1 −2 2αk −1
z −
z +1
k +1
k +1
z −2 −
⎛ Ωp 2 + Ωp1 ⎞
cos ⎜
⎟
2
⎠
⎝
α=
⎛ Ωp 2 − Ωp1 ⎞
cos ⎜
⎟
2
⎝
⎠
⎛ Ωp2 − Ωp1 ⎞ ⎛ θp ⎞
k = cot g ⎜
⎟ tg⎜ ⎟
2
⎝
⎠ ⎝2⎠
Ωp1 = frecuencia de corte inferior desada
Ωp2 = frecuencia de corte superor desada
BANDA
ELIMINADA
2αk −1 1 − k
z +
1
1+ k
+k
z' =
1 − k −2 2αk −1
z −
z +1
1+ k
1+ k
−1
z −2 −
⎛ Ωp 2 + Ωp1 ⎞
cos ⎜
⎟
2
⎝
⎠
α=
⎛ Ωp 2 − Ωp1 ⎞
cos ⎜
⎟
2
⎝
⎠
⎛ Ωp 2 − Ωp1 ⎞ ⎛ θ p ⎞
k = tg ⎜
⎟ tg⎜ ⎟
2
⎝
⎠ ⎝2⎠
Ωp1 = frecuencia de corte inferior desada
Ωp 2 = frecuencia de corte superor desada
DISEÑO DE FILTROS
DIGITALES FIR
SISTEMAS FIR DE FASE LINEAL (I)
H (Ω )
⎧⎪− Fase lineal H (Ω ) = H (Ω )⋅ e − jαΩ
⇒ ⎨
⎪⎩− Fase lineal generalizada H (Ω ) = A(Ω )⋅ e j (β−αΩ )
Función real de Ω
1
h[n] =
2π
∫ H (Ω) ⋅ e
jΩn
2π
e jβ
dΩ =
2π
∫ A(Ω ) ⋅ e
Constantes reales
jΩ ( n − α )
dΩ = e jβ a[n − α ]
2π
h[n] = e jβ a[n − α ]
a[n] = a∗[− n]
⇒
e− jβ h[n + α ] = e jβ h∗ [− n + α ]
⎧h[n] es causal
M
Si ⎨
⇒ α=
2
⎩h[n] ≠ 0 ; 0 ≤ n ≤ M
a[n] = e− jβ h[n + α ]
h[n] = e j 2β h∗ [− n + 2α ]
h[n] = e j 2 β h∗ [M − n]
SISTEMAS FIR DE FASE LINEAL (II)
h[n] = e j 2 β h∗ [M − n]
Coeficientes del filtro reales ⇒
h[n] = h∗ [n] ⇒ e j 2 β Re al ⇒ β = kπ / 2, k ∈ Z
h[n] = (− 1)k ⋅ h[M − .n], k ∈ Z
H (Ω ) = A(Ω )⋅ e
h[n] = h[M − n]
h[n] = −h[M − n]
(2
j kπ − M Ω
2
),
k ∈ Z , M (orden del filtro)
⎧ Tipo I: k = 0 (simetría positiva) y M par
⎨
⎩ Tipo II: k = 0 (simetría positiva) y M impar
⎧ Tipo III: k = 1 (simetría negativa) y M par
⎨ Tipo IV: k = 1 (simetría negativa) y M impar
⎩
SISTEMAS FIR DE FASE LINEAL (III)
Ejemplo: Obtener la respuesta en frecuencia de un sistema FIR de orden par cuya respuesta al
Impulso tiene simetría positiva y demostrar que es de fase lineal.
⎧h[0] = h[M ]
⎪h[1] = h[M − 1]
⎪⎪
h[n] = h[M − n]⎫
...
⎬ ⇒ ⎨
M ≡ Par
⎭
⎪ ⎡M ⎤
⎡M ⎤
⎪h ⎢ − 1⎥ = h ⎢ + 1⎥
⎪⎩ ⎣ 2
⎦
⎦
⎣2
M
M
−
Ω
j
⎡M ⎤
− jΩn
− jΩ
2
= h[0] + h[1]⋅ e
+ ... + h ⎢ ⎥⋅ e
H (Ω ) =
h[n]⋅ e
+ ... + h[M − 1]⋅ e − j (M −1)Ω + h[M ]⋅ e − jMΩ
⎣2⎦
n =0
∑
H (Ω ) = e
−j
⎛M
⎛M ⎞
⎛M ⎞
⎧
M
M
j ⎜ −1⎟Ω
− j⎜
− j ⎜ −1⎟Ω
j Ω
Ω ⎪
2 ⋅ ⎨h[0]⋅ e 2 + h[1] ⋅e ⎝ 2 ⎠ + ... + h ⎡ M ⎤+ ... + h[M − 1] ⋅ e ⎝ 2 ⎠ + h[M ] ⋅e ⎝ 2
⎪
⎩
H (Ω ) = e
⎢⎣ 2 ⎥⎦
−j
M
Ω
⎛⎛ M
⎞ ⎞
⎡ M ⎤⎫
⎛M ⎞
2 ⋅⎧
[
]
[
]
2
0
2
1
1
h
cos
h
cos
...
h
+
⋅
−
Ω
+
+
⋅
Ω
⎜
⎟
⎜
⎟
⎜
⎟
⎬
⎨
⎢⎣ 2 ⎥⎦
⎠ ⎠
⎝⎝ 2
⎭
M
⎧
⎫
−1
M
⎪⎪ ⎡ M ⎤ 2
⎡ ⎛M
⎞⎤ ⎪⎪ − j 2 Ω
H (Ω ) =⎨h⎢ ⎥ + ∑ 2h[n]⋅ cos⎢Ω⎜ − n ⎟⎥ ⎬ ⋅ e
= A(Ω )⋅ e jθ(Ω )
⎠⎦ ⎪
⎣ ⎝ 2
⎪ ⎣ 2 ⎦ n =0
⎪⎩
⎪⎭
M
−1
M
⎡ ⎛M
⎡M ⎤ 2
⎞⎤
A(Ω ) =h ⎢ ⎥ + ∑ 2h[n] ⋅cos⎢Ω⎜ − n ⎟⎥ ; θ(Ω ) = − Ω
2
⎣ 2 ⎦ n =0
⎠⎦
⎣ ⎝ 2
⎩
⎝ 2
⎠
⎞ ⎫
⎟Ω ⎪
⎠
⎬
⎪
⎭
SISTEMAS FIR DE FASE LINEAL (IV)
Tipo
I
II
h[n]
Simetría
Positiva
h[n] = h[M − n]
Orden M
Par
H (Ω )
− jΩM
2
=e
[ ]
H(Ω ) =
III
Simetría
Negativa
Par
n =1
[2
IV
(
Impar
]
−jΩM−π
2 2
e
[
H(Ω ) =
(
−jΩM−π
2 2
e
[2
]
∑ b[n ] ⋅ cos[Ω ⋅ (n − 12 )]
⋅
c[n ] = 2h M − n
2
h[n] = − h[M − n]
[
M +1
2
b[n ] = 2h M +1 − n
H(Ω ) =
∑ a[n]⋅ cos[Ω ⋅ n]
⋅
a[n] = 2h M − n
2
− jΩ M
2
e
d[n ] = 2h M +1 − n
]
)⋅
M
2
−ΩM
M
2
−ΩM
M
2
2
2
∑ c[n ] ⋅ sen[Ω ⋅ n ]
−ΩM +π
∑ d[n ] ⋅ sen[Ω ⋅ (n − 12 )]
−ΩM +π
n =1
]
)⋅
τ
M
2
n =0
a[0] = h M
2
Impar
θ(Ω)
H(Ω)
M +1
2
n =1
2
2
2
2
M
2
M
2
SISTEMAS FIR DE FASE LINEAL (V)
Posiciones de los ceros en los sistemas FIR de fase lineal:
H (z ) =
M
∑ h[n]⋅ z
n =0
−n
=
M
∑ ± h[M − n]⋅ z
−n
n =0
=z
−M
( )
H ( z ) = ± z − M ⋅ H z −1
- Ceros de H(z):
( )
⋅
0
( )
−1 −k
[
]
±
h
k
⋅
z
∑
k =M
( )
z1 = r1e jΩ1 ⇒ H ( z1 ) = ± z1− M ⋅ H z1−1 = 0 ⇒ H z1−1 = 0 ⇒ z1−1 cero de H ( z )
Si h[n] real:
( )−1 También cero de H ( z)
z1∗ también cero de H ( z ) ⇒ z1∗
Casos particulares (z = 1; z = -1):
Simetría Positiva:
z =1 ⇒
z = −1
( )
H ( z ) = z − M ⋅ H z −1
H (1) = (1)M H (1) = H (1)
⇒
⎧M par ⇒ H (− 1) = H (− 1)
H (− 1) = (− 1)M H (− 1) ⇒ ⎨
⎩M impar ⇒ H (− 1) = − H (− 1) ⇒ H (− 1) = 0
Sistemas con simetría positiva y M impar (tipo II) poseen un cero en z = -1
SISTEMAS FIR DE FASE LINEAL (VI)
Posiciones de los ceros en los sistemas FIR de fase lineal:
H (z ) =
M
∑ h[n]⋅ z
−n
n =0
- Ceros de H(z):
=
M
∑ ± h[M − n]⋅ z
−n
n =0
=z
−M
( )
H ( z ) = ± z − M ⋅ H z −1
( )
⋅
0
( )
−1 −k
[
]
±
h
k
⋅
z
∑
k =M
( )
z1 = r1e jΩ1 ⇒ H ( z1 ) = ± z1− M ⋅ H z1−1 = 0 ⇒ H z1−1 = 0 ⇒ z1−1 cero de H ( z )
Si h[n] real:
( )−1 También cero de H ( z)
z1∗ también cero de H ( z ) ⇒ z1∗
Casos particulares (z = 1; z = -1):
Simetría Negativa:
z =1
z = −1
⇒ H (1) = −(1)M H (1) = − H (1)
⇒
( )
H ( z ) = − z − M ⋅ H z −1
H (− 1) = −(− 1)M H (− 1) ⇒
Sistemas tipo III y IV poseen un cero en z = 1
⎧M par ⇒ H (− 1) = − H (− 1) ⇒ H (− 1) = 0
⎨
⎩M impar ⇒ H (− 1) = H (− 1)
Sistemas tipo III poseen un cero en z =- 1
SISTEMAS FIR DE FASE LINEAL (VII)
DIAGRAMAS DE POLOS Y CEROS DE SISTEMAS FIR DE FASE LINEAL
Orden par
Orden impar
Orden impar
Orden par
Orden par
Orden impar
DISEÑO DE FILTROS FIR
FILTROS IDEALES:
1.- Su hd[n] tiene longitud infinita.
2.- Su hd[n] es no causal ( hd[n] ≠ 0, ∀ n < 0 ).
SOLUCIÓN (MÉTODO DE LAS VENTANAS):
1.- Limitar la longitud de hd[n] a M+1 muestras
(Multiplicarla por una función ventana h[n] = hd[n]·w[n] ).
2.- Introducir el retardo necesario para que h[n] sea causal.
DISEÑO DE FILTROS FIR
FILTRO DISCRETO PASO BAJO IDEAL
H d (Ω ) =
∞
∑ hd [n]⋅e− jΩn
n = −∞
1
1
jΩn
(
)
hd [n] =
H
Ω
⋅
e
d
Ω
=
d
2π ∫
2π
2π
∫
ΩC
e jΩn dΩ =
− ΩC
sen (ΩC n )
πn
Respuesta al impulso de un filtro discreto Paso Bajo Ideal
1
0.8
|Hd(Ω)|
hd[n]
0.6
0.4
0.2
−π
−ΩC
ΩC
π
Ω
...
...
0
-0.2
-30
-20
-10
0
n
Filtro ideal: Respuesta al impulso no causal e infinita.
10
20
30
DISEÑO DE FILTROS FIR: VENTANAS
1
0.5
Respuesta Impulsiva
del Filtro Ideal: hd[n]
0
-0.5
-50
-40
-30
-20
-10
0
10
20
30
40
50
1
0.5
Ventana (Rectangular)
w[n]
0
-0.5
-50
-40
-30
-20
-10
0
10
20
30
40
50
1
0.5
0
-0.5
-50
-40
-30
-20
-10
0
10
20
30
40
50
1
Respuesta Impulsiva
desplazada para que
sea causal: h[n-n0]
0.5
0
-0.5
-50
Respuesta impulsiva
obtenida:
h[n] = hd[n]· w[n]
-40
-30
-20
-10
0
10
20
30
40
50
DISEÑO DE FILTROS FIR: VENTANAS
SI PRIMERO DESPLAZAMOS Y DESPUÉS MULTIPLICAMOS,
EL RESULTADO ES EL MISMO ( VENTANAS CAUSALES).
1
Respuesta Impulsiva
del Filtro Ideal: hd[n]
0.5
0
-0.5
-50
-40
-30
-20
-10
0
10
20
30
40
50
1
Respuesta Impulsiva del
Filtro Ideal desplazada
hd[n-n0]
0.5
0
-0.5
-50
-40
-30
-20
-10
0
10
20
30
40
50
1
Ventana (Rectangular)
causal: w[n]
0.5
0
-0.5
-50
-40
-30
-20
-10
0
10
20
30
40
50
Respuesta impulsiva
obtenida:
h[n] = hd[n-n0]· w[n]
1
0.5
0
-0.5
-50
-40
-30
-20
-10
0
10
20
30
40
50
DISEÑO DE FILTROS FIR: VENTANAS
Transformada de Fourier de la ventana rectangular:
0≤n≤M
el resto
⎧1
w[n] = ⎨
⎩0
⎡ ⎛ M + 1 ⎞⎤
M
sen ⎢Ω⋅ ⎜
⎟⎥
⎝ 2 ⎠⎦ − j 2 Ω
− jφ(Ω )
⎣
=
W (Ω ) = W p (Ω ) ⋅ e
⋅e
⎛Ω⎞
sen ⎜ ⎟
⎝2⎠
12
10
8
A(Ω )
6
1
4
2
0.8
0
-4
-3
-2
-1
...
0.4
0
1
2
3
1
2
3
Ω
20
0.2
15
10
0
0
...
n
M
5
φΩ)
w[n]
-2
0.6
0
-5
-10
-15
-20
-3
-2
-1
0
Ω
DISEÑO DE FILTROS FIR: VENTANAS
RESPUESTA DE FASE LINEAL
h[n] = hd [n] ⋅ w[n] ←⎯
⎯→ H (Ω ) = H d (Ω ) ⊗ W (Ω ) =
TF
1
2π
∫ H d (θ) ⋅ W (Ω − θ) ⋅ dθ
2π
Todas las ventanas van a tener simetría positiva:
⎧w[M − n],
w[n] = ⎨
⎩0 ,
0≤n≤M
←⎯
⎯→ W (Ω ) = W p (Ω ) ⋅ e
TF
resto de n
− jΩ
M
2
Las Respuestas al Impulso de los Filtros Ideales Tendrán Simetría Positiva o Negativa:
hd [n] = hd [M − n]
hd [n] = − hd [M − n]
H (Ω ) = e
H d (Ω ) = jAn (Ω ) ⋅ e
TF
←⎯
⎯→
H (Ω ) =
Simetría positiva
H d (Ω ) = Ap (Ω ) ⋅ e
TF
←⎯
⎯→
− jΩ
1
2π
− jΩ
π
∫ Ap (θ) ⋅ e
− jθ
− jΩ
M
2
M
M
− j (Ω − θ )
2 ⋅ W (Ω − θ ) ⋅ e
2 ⋅ dθ
p
−π
M
π
1
2 ⋅
Ap (θ) ⋅ W p (Ω − θ) ⋅ dθ
2π
−π
∫
M
2
DISEÑO DE FILTROS FIR: VENTANAS
EFECTO DEL ENVENTANADO SOBRE LA RESPUESTA
DE AMPLITUD DEL FILTRO.
H (Ω ) = e
− jΩ
M
M
π
−
Ω
j
2 ⋅ 1
2 ⋅ A(Ω )
Ap (θ) ⋅ W p (Ω − θ) ⋅ dθ = e
2π
−π
∫
1
0.8
Wp (Ω )
0.6
0.4
0.2
0
-0.2
-3
-2
-1
0
Ω
1
2
3
DISEÑO DE FILTROS FIR: VENTANAS
EFECTO DEL ENVENTANADO SOBRE LA RESPUESTA
DE AMPLITUD DEL FILTRO. LÓBULO PRINCIPAL
-2π
-π-π
Ω=
-π
Ω = -ΩΩ1 = -Ω2 Ω
-Ω1
-Ω2
Ω = Ω2Ω = Ω1
Ω2
Ω1
Ω π= π
π
ΔΩ = Ω2 - Ω1 = ZONA DE TRANSICIÓN
Debida Fundamentalmente a la Anchura del Lóbulo Principal
2π
EFECTO DEL
ENVENTANADO SOBRE LA
RESPUESTA
DE AMPLITUD DEL FILTRO.
LÓBULOS SECUNDARIOS
DISEÑO DE FILTROS FIR: VENTANAS
-2π
-π
Ω = -π
π
Ω
Ω =Ω-Ω=1 -Ω2
-π
-Ω1
-Ω2
Ω =ΩΩ=2 Ω1
Ω2
Ω1
Ω=π
π
RIZADO EN BANDA DE PASO Y ELIMINADA
Debida a los Lóbulos Secundarios (Principalmente al primero)
2π
DISEÑO DE FILTROS FIR: VENTANAS
VENTANA RECTANGULAR.
MÓDULO DE LA TRANSFORMADA DE FOURIER DE LA VENTANA RECTANGULAR
M+1 = 9
M+1 = 13
12
8
10
6
8
6
4
4
2
2
0
-2
0
2
0
-2
Ω
0
2
Ω
M+1 = 18
M+1 = 26
25
15
20
⎛ M +1⎞
sen⎜ Ω ⋅
⎟
2
⎠
⎝
W (Ω ) =
⎛Ω⎞
sen⎜ ⎟
⎝2⎠
15
10
10
5
5
0
-2
0
Ω
2
0
-2
0
2
Ω
ANCHURA DEL LÓBULO PRINCIPAL = ΔΩ =
4π
M +1
DISEÑO DE FILTROS FIR: VENTANAS
VENTANA RECTANGULAR.
AMPLITUD RELATIVA DEL LÓBULO SECUNDARIO = -13 dB
M+1 = 9
M+1 = 13
0
0
-10
-10
-20
-20
-30
-30
-40
-40
-50
-50
-60
0
1
2
3
-60
0
1
Ω
M+1 = 18
-10
-10
-20
-20
-30
-30
-40
-40
-50
-50
1
2
Ω
2
3
M+1 = 26
0
0
3
Ω
0
-60
2
3
-60
0
1
Ω
DISEÑO DE FILTROS FIR: VENTANAS
PARA MODIFICAR LA AMPLITUD DE LOS LÓBULOS SECUNDARIOS
HAY QUE MODIFICAR LA FORMA DE LA VENTANA.
SE UTILIZAN VENTANAS QUE NO CONTENGAN
DISCONTINUIDADES ABRUPTAS ( FENÓMENO DE GIBBS )
CONLLEVA EL AUMENTO DE LA ANCHURA DEL LÓBULO PRINCIPAL
REGIÓN DE TRANSICIÓN EN LA RESPUESTA DEL FILTRO FIR MÁS ANCHA
PARA COMPENSARLO SE INCREMENTARÁ “M”
DISEÑO DE FILTROS FIR: VENTANAS
ALGUNAS VENTANAS UTILIZADAS: EXPRESIÓN ANALÍTICA
BARTLETT
M
⎧ 2n
∀ 0≤n≤
⎪M ,
2
⎪
2n
M
⎪
≤n≤M
w [ n ] = ⎨2 − , ∀
M
2
⎪
⎪
⎪0,
Re sto n
⎩
HAMMING
⎧
⎛ 2πn ⎞
⎪0,54 − 0, 46 cos ⎜ M ⎟ , ∀ 0 ≤ n ≤ M
⎝
⎠
⎪⎪
w [n ] = ⎨
⎪0,
Re sto n
⎪
⎪⎩
HANNING
⎧
⎛ 2πn ⎞
⎪0,5 − 0,5 cos ⎜ M ⎟ , ∀ 0 ≤ n ≤ M
⎝
⎠
⎪⎪
w [n ] = ⎨
⎪0,
Re sto n
⎪
⎪⎩
BLACKMAN
⎧
⎛ 2πn ⎞
⎛ 4πn ⎞
⎪0, 42 − 0,5 cos ⎜ M ⎟ + 0, 08 cos ⎜ M ⎟
⎝
⎠
⎝
⎠
⎪⎪
w [n] = ⎨
⎪0,
Re sto n
⎪
⎪⎩
0≤n≤M
DISEÑO DE FILTROS FIR: VENTANAS
ALGUNAS VENTANAS UTILIZADAS: REPRESENTACIÓN ( M = 50 )
BARTLETT
HANNING
1
1
0.8
0.8
0.6
0.6
0.4
0.4
0.2
0.2
0
0
10
20
30
40
50
0
0
10
HAMMING
1
0.8
0.8
0.6
0.6
0.4
0.4
0.2
0.2
0
10
20
30
30
40
50
40
50
BLACKMAN
1
0
20
40
50
0
0
10
20
30
DISEÑO DE FILTROS FIR: VENTANAS
(
)
ALGUNAS VENTANAS UTILIZADAS: −20 log W ( Ω ) / max W ( Ω ) .
M = 50
BARLETT
HANNING
0
0
-20
-20
-40
-40
-60
-60
-80
-80
-100
0
1
2
3
-100
0
1
HAMMING
0
-20
-20
-40
-40
-60
-60
-80
-80
0
1
2
3
BLACKMAN
0
-100
2
3
-100
0
1
2
3
DISEÑO DE FILTROS FIR: VENTANAS
(
VENTANA HANNIG: −20 log W ( Ω ) / max W ( Ω
. )
M = 20
M = 30
0
0
-20
-20
-40
-40
-60
-60
-80
-80
-100
0
1
2
3
-100
0
1
M = 40
0
-20
-20
-40
-40
-60
-60
-80
-80
0
1
2
3
2
3
M = 50
0
-100
)
2
3
-100
0
1
DISEÑO DE FILTROS FIR: VENTANAS
VENTANAS: RESUMEN DE CARACTERÍSTICAS
VENTANA
w[n] (0 ≤ n ≤ M)
Anchura del
Lóbulo Principal
Ai
αbe
rbp
ΔΩ
Rectangular
1
4π/(M+1)
13,3
20,9
1,57
1,84π/M
Hanning
1⎛
2πn ⎞
⎜1 − cos
⎟
2⎝
M ⎠
8π/(M+1)
31,5
43,9
0,11
6,22π/M
Hamming
⎛ 2πn ⎞
0.54 − 0.46 ⋅ cos⎜
⎟
⎝ M ⎠
8π/(M+1)
42,7
54,5
0,033
6,64π/M
Blackman
⎛ 2πn ⎞
⎛ 4πn ⎞
0.42 − 0.5 ⋅ cos⎜
⎟ + 0.08 ⋅ cos⎜
⎟
⎝ M ⎠
⎝ M ⎠
12π/(M+1)
58,1
75,3
0,00298
11,12π/M
Ai : Amplitud máxima relativa (en dB's) de los lóbulos laterales.
αbe=-20 log(δ) : Atenuación mínima (en dB's) en la banda eliminada.
rbp =-20 log((1- δ)/(1+ δ)): Rizado en la banda de paso.
ΔΩ: anchura de la banda de transición.
PARÁMETRO ÚNICO DE DISEÑO: ORDEN DEL FILTRO ( M )
DISEÑO DE FILTROS FIR: VENTANAS
VENTANA DE KAISER
⎧
⎪I
⎪⎪ 0
w[ n] = ⎨
⎪
⎪
⎪⎩0,
1
⎡ ⎛
2⎞ 2 ⎤
⎢β ⎜ 1 − ⎡ n − α ⎤ ⎟ ⎥
⎢ ⎜⎝ ⎢⎣ α ⎥⎦ ⎟⎠ ⎥
⎥⎦
⎣⎢
I 0 (β)
∀ 0≤ n≤ M
∀
( )
⎡ x k⎤
L
I0 (x) ≈ 1 + ∑ ⎢⎢ 2 ⎥⎥
k!
k =1
⎢⎣
⎥⎦
resto de n
I0 ( ): Función de Bessel de Orden Cero
Modificada de Primera Clase
M
α=
2
β : Factor de Forma
2
( L ≤ 25)
DOS PARÁMETROS DE DISEÑO:
ORDEN DEL FILTRO ( M ) → AJUSTE DE ANCHURA DEL LÓBULO PRINCIPAL
FACTOR DE FORMA ( β ) → AJUSTE DE AMPLITUD DE LÓBULOS SECUNDARIOS
DISEÑO DE FILTROS FIR: VENTANAS
VENTANA DE KAISER: REPRESENTACIÓN PARA DISTINTOS VALORES DE β
β=0
β=3
1
1
0.8
0.8
0.6
0.6
0.4
0.4
0.2
0.2
0
0
10
20
30
40
50
n
0
n
0
10
20
β=6
1
0.8
0.8
0.6
0.6
0.4
0.4
0.2
0.2
0
10
20
40
50
30
40
50
β=9
1
0
30
30
40
50
n
0
n
0
10
20
DISEÑO DE FILTROS FIR: VENTANAS
(
VENTANA DE KAISER: −20 log W ( Ω ) / max W ( Ω )
)
PARA DISTINTOS VALORES DE M
0
M = 10
-20
M = 41
M = 20
-40
-60
-80
-100
-120
0
0.5
1
1.5
2
2.5
3
Ω
DISEÑO DE FILTROS FIR: VENTANAS
(
)
VENTANA DE KAISER: −20 log W ( Ω ) / max W ( Ω ) PARA DISTINTOS VALORES DE β
00
β β= =9 6
-10
-10
β=3 β=6
β=3
β=3
β=0
β=0
-20
-20
β == 00
-30
-30
-40
-40
-50
-50
-60
-60
-70
-70
-80
-80
00
0.5
0.5
11
1.5
1.5
Ω
DISEÑO DE FILTROS FIR: VENTANAS
VENTANA DE KAISER: OBTENCIÓN DE β y M
Definiendo A = −20 log δ
con δ = min ( δp , δa )
⎧0,1102 (A − 8,7)
⎪⎪
β = ⎨0,5842 (A - 21) 0,4 + 0,07886 (A − 21)
⎪0,0
⎪⎩
A − 7,95 A − 7,95
M≥
=
2, 285 ΔΩ 14,36 Δf
A > 50
21 ≤ A ≤ 50
A < 21
DISEÑO DE FILTROS FIR: VENTANAS
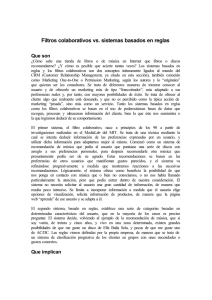
EJEMPLO
Se desea diseñar un sistema para procesar una señal analógica xc(t) (limitada en banda a 5 kHz)
con un filtro digital como se indica en la figura.
Las especificaciones del módulo de la respuesta en frecuencia del sistema analógico |H(ω)| son:
-Atenuación máxima en la banda de paso αp= 1 dBs.
mínima en la banda atenuada αa = 15 dBs.
- Frecuencia de corte en la banda de paso: fp = 800 Hz
- frecuencia de corte en la banda atenuada: fa = 1400 Hz
- Atenuación
DISEÑO DE FILTROS FIR: CAMBIO DE ESPECIFICACIONES
|H(Ω)|
α(dB)
1 − δ1 = 10
αmin
δ2 = 10
−
−
α max
20
1
1 - δ1
α min
20
αmax
δ2
Ωp
Ωa
π
Ω
1 − δ p = (1 − δ1 ) (1 + δ p ) ⇒
Ω
π
Ωa
Ωp
(1 − δ ) = (1 + δ )10
p
p
−
α max
20
|H(Ω)|
⎛
δ p ⎜⎜10
⎝
1+ δp
1
1 - δp
α
− max
20
⎞
+ 1⎟⎟ = 1 − 10
⎠
α
− max
20
Ωp
Ωa
π
Ω
δp =
10
10
α max
20
α max
20
−1
+1
1 − 10
1 + 10
δa = (1 + δp ) δ2 = 10
δa
⇒ δp =
;
−
α min
20
−
α max
20
α
− max
20
=
10
10
α max
20
α max
20
−1
+1
(1 + δ )
p
δa = 10
−
α min
20
(1 + δ )
p
DISEÑO DE FILTROS FIR: CAMBIO DE ESPECIFICACIONES
|H(Ω)|
1+δp
1-δp
1
1-δ1
δa
δ2
π
Ω
DISEÑO DE FILTROS FIR: VENTANAS
EJEMPLO
SOLUCIÓN:
1. PLANTILLAS:
b) Plantilla de atenuación del Filtro Discreto:
a) Plantilla de atenuación del Filtro Analógico:
Ω = ω ⋅ Ts
⇒
1
⎧
Ω p = ω p ⋅ Ts = 2π ⋅ 800 ⋅ 10 − 3 = 0,2π
⎪
1
⎪
8
Ts = ms ⇒ ⎨
8
⎪Ω = ω ⋅ T = 2π ⋅ 1400 ⋅ 1 10 − 3 = 0,35π
a s
⎪⎩ a
8
d) Plantilla de amplitud del Filtro discreto en unidades naturales:
αp
1
10 20 − 1 10 20 − 1
δp =
=
= 0,0575
αp
1
10 20 + 1 10 20 + 1
α
− a
δa = 10 20 ⋅ 1 + δ p = 0,188
(
)
DISEÑO DE FILTROS FIR: VENTANAS
EJEMPLO
SOLUCIÓN:
2. Diseño:
Parámetros de diseño:
(
)
δ = min δ p ,δa = δ p = 0,0575
ΔΩ = Ω a − Ω p = 0,35π − 0 ,2π = 0 ,15π
Ωc =
α'a = −20 ⋅ log (δ ) = 24,8 dB
Ω p + Ωa
VENTANA
αbe
Rectangular
20,9
Hanning
43,9
Hamming
54,5
Blackman
75,3
M>
Ventana de Kaiser:
⇒
2
=
0 ,2π + 0 ,35π
= 0 ,275π
2
6 ,22π
= 41,46
0 ,15π
6 ,64π
M>
= 44 ,27
0 ,15π
M>
M>
11,12π
= 74 ,13
0 ,15π
A − 7 ,95
24,8 − 7 ,95
= 15,65 ⇒ M = 16
=
2,285 ⋅ ΔΩ 2 ,285 ⋅ 0 ,15π
β = 0 ,5842 ⋅ ( A − 21)0 ,4 + 0 ,07886 ⋅ ( A − 21) = 1,296
⇒ M = 42
⇒ M = 45
⇒ M = 75
DISEÑO DE FILTROS FIR: VENTANAS
EJEMPLO
SOLUCIÓN:
Ventana
Orden
δ
ΔΩ
Ω’ p
Ω’a
Hanning
42
0,0064
0,148π
0,201 π
0,349π
Hamming
45
0,0019
0,147π
0,201 π
0,348π
Blackman
75
0,00017
0,148π
0,201 π
0,349π
Kaiser
16
0,0575
0,15π
0,2 π
0,35π
Ω' p = Ωc −
ΔΩ
2
α
− ba
δ = 10 20
;
;
Ω'a = Ωc +
ΔΩ
2
M ⎞⎞
⎛
⎛
sen⎜ ΩC ⎜ n − ⎟ ⎟
M⎤
2 ⎠⎠
⎡
⎝
⎝
hD [n] = hI ⎢n − ⎥ ⋅ w[n] =
⋅ w[n]
M
2
⎛
⎞
⎣
⎦
π⋅⎜n − ⎟
2 ⎠
⎝
DISEÑO DE FILTROS FIR: VENTANAS
EJEMPLO
SOLUCIÓN:
- Hanning: FIR fase lineal tipo I
⎧ sen(0 ,275π(n − 21)) 1 ⎡
⎛ 2πn ⎞⎤
⋅ ⋅ ⎢1 − cos⎜
⎟⎥ ; 0 ≤ n ≤ 42
⎪
hD [n] = ⎨
2 ⎣
π ⋅ (n − 21)
⎝ 42 ⎠⎦
⎪0
; resto de n
⎩
- Hamming: FIR fase lineal tipo II
⎧ sen(0 ,275π(n − 22,5)) ⎡
⎛ 2πn ⎞⎤
⋅ ⎢0 ,54 − 0 ,46 ⋅ cos⎜
⎟⎥ ; 0 ≤ n ≤ 45
⎪
hD [n] = ⎨
π ⋅ (n − 22 ,5)
⎝ 45 ⎠⎦
⎣
⎪0
; resto de n
⎩
- Blackman: FIR fase lineal tipo II
⎧ sen(0 ,275π(n − 37 ,5)) ⎡
⎛ 4πn ⎞⎤
⎛ 2πn ⎞
⋅ ⎢0 ,42 − 0 ,5 ⋅ cos⎜
⎟⎥ ;
⎟ − 0 ,08 ⋅ cos⎜
⎪
hD [n] = ⎨
π ⋅ (n − 37 ,5)
⎝ 75 ⎠⎦
⎝ 75 ⎠
⎣
⎪0
; resto de n
⎩
- Kaiser: FIR fase lineal tipo I
⎧
⎡
⎛ ⎡ n − 8 ⎤ ⎞⎤
I 0 ⎢1,296 ⋅ ⎜1 − ⎢
⎪
⎥⎦ ⎟⎥
8
⎪ sen(0 ,275π(n − 8))
⎣
⎠⎦
⎝
⋅ ⎣
; 0 ≤ n ≤ 16
hD [n] = ⎨
(
)
(
)
1
296
8
π
⋅
n
−
I
,
0
⎪
⎪⎩0
; resto de n
0 ≤ n ≤ 75
DISEÑO DE FILTROS FIR: VENTANAS
Respuesta al impulso del filtro utilizando la ventana de Hamming
Respuesta al impulso del filtro utilizando la ventana de Hanning
0.3
0.3
0.25
0.25
0.2
0.2
0.15
|hDHam[n]
|hDHan[n]
0.15
0.1
0.1
0.05
0.05
0
0
-0.05
-0.05
-0.1
-0.1
0
5
10
15
20
n
25
30
35
0
0.25
0.25
0.2
0.2
0.15
0.15
0.1
0.05
0
0
-0.05
-0.05
-0.1
30
40
50
60
25
30
35
40
45
0.1
0.05
20
20
Respuesta al impulso del filtro utilizando la ventana de Kaiser
0.3
|hDKai[n]
|hDBLan[n]
Respuesta al impulso del filtro utilizando la ventana de Blackman
10
15
hD,Ham= fir1(M,ΩC,Hamming(M+1))
0.3
0
10
n
hD,Han= fir1(M,ΩC,Hann(M+1))
-0.1
5
40
70
hD,Blac= fir1(M,ΩCn,Blackman(M+1))
0
2
4
6
8
10
12
14
hD,kaiser= fir1(M,ΩCn,kaiser(M+1,β))
16
DISEÑO DE FILTROS FIR: VENTANAS
Módulo de la respuesta en frecuencia del filtro
1
Hanning
Hamming
Blackman
Kaiser
|HD(Ω )|
0.8
0.6
0.4
0.2
0
0
0.5
1
1.5
2
2.5
3
Ω
Módulo de la respuesta en frecuencia del filtro
Módulo de la respuesta en frecuencia del filtro
0.25
Hanning
Hamming
Blackman
Kaiser
1.15
1.1
Hanning
Hamming
Blackman
Kaiser
0.2
0.15
|HD(Ω )|
|HD(Ω )|
1.05
1
0.1
0.95
0.9
0.05
0.85
0.1
0.2
0.3
0.4
0.5
Ω
0.6
0.7
0.8
0.9
0
1
1.5
2
Ω
2.5
3
DISEÑO DE FILTROS: COMPARACIÓN IIR - FIR
FIR
IIR
del
Sólo contiene ceros, todos sus polos en el
origen, excepto si se emplea muestreo en
frecuencia
Contiene polos y ceros en puntos finitos de z, ello
proporciona mayor flexibilidad en el diseño de
filtros sencillos (método de ubicación de ceros y
polos)
2.- Respuesta en
frecuencia
Para selectividades altas se requieren órdenes
altos (todos los polos están en z = 0). No es
posible diseñar filtros paso todo.
Se consiguen selectividades altas con órdenes
reducidos al disponer de pares polo-cero. Es
posible diseñar todo tipo de filtros.
3.- Característica
de fase
Es posible conseguir fase lineal.
Sólo puede conseguirse fase lineal utilizando
ecualizadores con lo que el filtro es más
complejo.
4.- Estabilidad
Son siempre estables
Pueden ser inestables si los polos caen fuera de la
circunferencia unidad.
5.- Estructura
Admiten estructuras recursivas y no recursivas.
La estructura más utilizada es la no recursiva
denominada filtro transversal
Sólo puede usarse la estructura recursiva. La más
utilizada es la de cascada de secciones de primer
y segundo orden.
6.-Carga
computacional
complejidad
Se requiere un computador de tamaño medio y
la complejidad depende de la longitud de su
h[n].
No se requiere un computador grande y suele
utilizarse la transformación bilineal con lo que no
son demasiados cálculos. Son poco complejos.
Si la realización es no recursiva la salida del
sistema puede verse afectada por su estado
inicial o por cualquier interferencia de corta
duración durante la longitud de la respuesta al
impulso.
La perturbación debido a la recursividad del filtro
puede afectar a la señal de salida de forma
indefinida.
1.- Función
sistema H(z)
y
7.- Sensibilidad a
las interferencias
DISEÑO DE FILTROS: COMPARACIÓN IIR - FIR
8.- Efecto de la
cuanti-ficación de
los coeficientes
Con estructura no recursiva no es un problema
importante. Cuando estos filtros se realizan de
forma recursiva debe conseguirse una
cancelación exacta de polos y ceros después de
la cuantificación obligándonos a utilizar
longitudes de palabra mayores.
Es un problema importante puesto que puede
hacerse inestable. Pueden producirse oscilaciones
indeseadas a causa del desbordamiento
(Oscilación de overflow) o oscilaciones de ciclo
límite.
9.- Memoria
Necesitan mucha memoria para almacenar la
muestra actual y las anteriores de la señal de
entrada, así como los coeficientes del filtro.
Necesitan menos memoria ya que el número de
coeficientes es menor que el equivalente FIR.