Introducción al GPS.
Anuncio

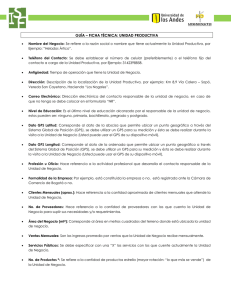
Tutoriales Introducción al GPS. El Sistema de Posicionamiento Global (GPS por sus siglas en inglés) es un sistema de navegación basado en satélites que es capaz de proveer información de la localización y la hora en cualquier condición climatológica, en cualquier lugar sobre o cerca de la Tierra donde haya una línea de vista sin obstáculos de 4 o más satélites. Contenido: 1. Introducción 2. Principio de funcionamiento. 3. Alcances y limitaciones. 4. Protocolo de comunicación. 5. Aplicaciones 6. Herramientas disponibles. 6.1 El GPS shield. 6.2 El GPS Logger shield. 6.3 Librería de Arduino para uso con nuestros Shields GPS. 2. Principio de funcionamiento El GPS funciona basado en el principio de trilateración y multilateración, que son métodos matemáticos para determinar las posiciones relativas de objetos usando trigonometría de forma análoga a la triangulación. A diferencia de ésta que usa medidas de ángulos junto con alguna distancia conocida para calcular la localización del objeto, la trilateración utiliza las localizaciones conocidas de 2 o más puntos de referencia, y la distancia medida entre el sujeto y cada uno de ellos. Para determinar de forma única y precisa la localización de un punto en un plano, se necesitan al menos 3 puntos de referencia, siendo necesarios al menos 4 puntos de referencia para determinar la posición de un objeto en el espacio (Como es el caso del GPS). 1/8 Tutoriales 3. Alcances y limitaciones La precisión aproximada de los dispositivos GPS actuales ronda entre 3 y 15m para aplicaciones civiles, y los 3 pies (1m) para aplicaciones militares. Hay que recordar que cualquier instrumento de medición tiene un cierto grado de imprecisión, por lo que si bien teóricamente serían necesarios sólo 4 satélites para determinar nuestra ubicación espacial, ésta necesariamente conllevará un cierto margen de error. Esto se conoce como dilución de la precisión geométrica (GDOP). 2/8 Tutoriales Podemos apreciar esto con un ejemplo sencillo. En el caso A alguien ha medido la distancia a 2 marcas fijas (puntos rojo y azul), y marcado su punto como la intersección de los 2 círculos de los radios medidos. En B la medida tiene unos márgenes de error, y la localización real debe encontrarse en algún punto dentro del área verde. En C el margen de error es el mismo, pero el error de posición creció considerablemente debido al posicionamiento de las marcas fijas. Otro tema importante a considerar al utilizar dispositivos con GPS es que deben encontrar los satélites en línea de vista, es decir que no debe haber ningún objeto entre el satélite y el receptor GPS por lo que su funcionamiento se ve mermado en interiores y zonas con edificios altos o montañas muy cercanas. 4. Protocolo de comunicación Existe un protocolo al cual se apegan todos los fabricantes de receptores GPS, el cuál indica cuales son las posibles sentencias transmitidas de manera serial y escuchadas por el receptor, cada una de las cuales contiene información diferente. A continuación se muestran todas las posibles sentencias utilizadas para filtrar información de un GPS: AAM - Waypoint Arrival Alarm ALM - Almanac data APA - Auto Pilot A sentence APB - Auto Pilot B sentence BOD - Bearing Origin to Destination BWC - Bearing using Great Circle route DTM - Datum being used. GGA - Fix information GLL - Lat/Lon data GRS - GPS Range Residuals GSA - Overall Satellite data GST - GPS Pseudorange Noise Statistics GSV - Detailed Satellite data MSK - send control for a beacon receiver MSS - Beacon receiver status information. RMA - recommended Loran data RMB - recommended navigation data for gps RMC - recommended minimum data for gps RTE - route message TRF - Transit Fix Data STN - Multiple Data ID 3/8 Tutoriales VBW - dual Ground / Water Spped VTG - Vector track an Speed over the Ground WCV - Waypoint closure velocity (Velocity Made Good) WPL - Waypoint Location information XTC - cross track error XTE - measured cross track error ZTG - Zulu (UTC) time and time to go (to destination) ZDA - Date and Time Todas estas sentencias van precedidas de las siglas GP (ejemplo: GPAAM) y las más utilizadas son las siguientes: GGA, GSA, GSV, RMC y VTG, siendo la mínima requerida la RMC para obtener los datos de posición del dispositivo. La sentencia RMC consta de la siguiente información: Hora Fecha Posición Dirección Velocidad Por lo cual es más que suficiente para tener datos significativos sobre nuestro dispositivo. A continuación se muestra un ejemplo de sentencia GPRMC real y su significado: $GPRMC,064951.000,A,2307.1256,N,12016.4438,E,0.03,165.48,260406,3.05,W,A*2C NOMBRE EJEMPLO $GPRMC ID del mensaje 064951.000 Tiempo UTC A Estado 2307.1256 Latitud N Indicador N/S 12016.4438 Longitud E Indicador E/O Velocidad sobre el 0.03 suelo Inclinación sobre el 165.48 suelo 260406 Fecha Variación magnética 3.05, W A Modo UNIDADES Nudos(no Km/h!) Grados Grados DESCRIPCIÓN Encabezado del protocolo RMC Fecha en formato hhmmss.sss A=info válida o V=info no válida ddmm.mmmm N=Norte o S=Sur ddmm.mmmm E=Este o W=Oeste Velocidad horizontal desde la última medición Inclinación con respecto al suelo ddmmyy E=Este o W=Oeste A=Autónomo D=Diferencial 4/8 Tutoriales Checksum *2C E=Estimado Suma de verificación Fin de mensaje 5.Aplicaciones Existen una gran variedad de aplicaciones para los dispositivos GPS, entre las cuales se encuentran: Localización de vehículos de flotillas Verificación de rutas de vehículos Navegación y orientación de vehículos autónomos no tripulados (UAV) Telefonía Celular Cartografía Robótica Sincronización de relojes etc. 5/8 Tutoriales 6. Herramientas disponibles En 5Hz tenemos disponibles una variedad de herramientas que pueden facilitar la utilización de la tecnología GPS, entre las cuáles se encuentran: 6.1 El GPS Shield 6/8 Tutoriales Éste es un Shield que te brindará acceso al módulo GPS MTK3339 de manera sencilla utilizando un Arduino UNO. Éste módulo tiene muchas ventajas, pues pueden leerse de manera serial las sentencias NMEA con el puerto UART o un puerto UART emulado por software, por lo que requiere pocos pines para su funcionamiento y tiene una gran área de prototipado para añadir sensores adicionales. 6.2 El GPS Logger Shield Incluye todas las ventajas del GPS Shield, añadiendo un slot para tarjetas uSD, por lo que facilita el desarrollo de proyectos de Data logging (Pudiendo almacenar en un archivo de texto la información de nuestros sensores junto con su información de tiempo y geoposición). 7/8 Tutoriales 6.3 Librería de Arduino para uso con nuestros Shields GPS También contamos con una librería que facilitará el uso de estos módulos, que incluye funciones para verificar si ya se detectaron los satélites suficientes, para obtener una lectura del módulo, la información de latitud/longitud o incluso un link a Google maps con la ubicación actual leída!. Disponible aqui: GPS Shield GPS logger Shield Ir al inicio 8/8 Powered by TCPDF (www.tcpdf.org)