Contenidos - Facultad de Ciencias Exactas, Físicas y Naturales
Anuncio

Contenidos
1. Introducción
5
1.1.
La Mecánica Clásica de Medios Continuos
. . . . . . .
1.2.
Las Variables Fundamentales en la Mecánica de los
Sólidos . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.3.
Sistemas Coordenados
1.4.
Vectores y Tensores
5
6
. . . . . . . . . . . . . . . . . .
9
. . . . . . . . . . . . . . . . . . .
10
1.4.1.
Tensores de orden cero y de orden uno
. . . . .
11
1.4.2.
Tensores de orden dos
. . . . . . . . . . . . . .
13
1.4.3.
Ejemplo de tensor de segundo orden
. . . . . .
16
1.5.
Operador Diferencial: Gradiente y Divergencia . . . . .
17
1.6.
Teorema de la Divergencia. Integral por Partes.
. . . .
20
1.7.
Contenidos de Estas Notas . . . . . . . . . . . . . . . .
23
2. Análisis General de Tensiones
25
2.1.
Concepto de Tensión Asociada a un Plano
. . . . . . .
25
2.2.
El Tensor de Tensiones . . . . . . . . . . . . . . . . . .
27
2.3.
Relaciones entre el Vector de Tensión y el Tensor
2.4.
de Tensiones . . . . . . . . . . . . . . . . . . . . . . . .
29
Propiedades del Vector de Tensión . . . . . . . . . . . .
32
2.4.1.
Transformación de Tensiones con Cambio de Ejes
Coordenados.
2.4.2.
2.5.
. . . . . . . . . . . . . . . . . . .
Condición de Reciprocidad de Vectores Tensión.
Propiedades del Tensor de Tensiones
. . . . . . . . . .
2.5.1.
Simetría del Tensor de Tensiones
2.5.2.
Transformación del tensor de tensiones con cam-
2.5.3.
. . . . . . . .
32
34
35
35
bio de coordenadas . . . . . . . . . . . . . . . .
36
Direcciones Principales de Tensión
. . . . . . .
36
. . . . . . . .
36
2.5.3.1.
Consideraciones Físicas
1
Introducción a la Teoría de Elasticidad
2
2.5.3.2.
Una Forma Explícita de las Tensiones
Principales
2.5.4.
2.5.5.
. . . . . . . . . . . . . . .
39
Círculos de Mohr . . . . . . . . . . . . . . . . .
40
Componentes Esféricas y Desviadoras del
Tensor de Tensiones
2.5.5.1.
2.6.
2.7.
2.9.
Invariantes del Tensor Desviador
. . .
44
Estados Tensionales en el Espacio de las Tensiones Prin44
2.6.1.
Componentes Esféricas y Desviadoras . . . . . .
45
2.6.2.
Tensión de Corte en los Planos Octaédricos . . .
47
Ecuaciones Diferenciales de Equilibrio . . . . . . . . . .
50
2.7.1.
Equilibrio de Fuerzas . . . . . . . . . . . . . . .
50
2.7.2.
Equilibrio de Momentos
52
2.7.3.
Condiciones de Borde de Tensión
. . . . . . . . . . . . .
. . . . . . . .
∗
Forma Integral de las Condiciones de Equilibrio
54
Conceptos de Tensión
Comentarios Sobre el Origen de los
∗
. . . . . . . . . . . . . . . . . .
56
Ejercicios
58
. . . . . . . . . . . . . . . . . . . . . . . . .
3. Análisis General de Deformaciones
3.1.
41
cipales . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.7.4.
2.8.
. . . . . . . . . . . . . . .
53
61
Posición y desplazamiento de un punto. Medidas de deformación
. . . . . . . . . . . . . . . . . . . . . . . . .
61
Medidas en la geometría indeformada . . . . . .
62
3.2.
El gradiente de deformación. . . . . . . . . . . . . . . .
65
3.3.
Deformación especíca longitudinal
. . . . . . . . . . .
67
3.4.
Deformación especíca angular . . . . . . . . . . . . . .
69
3.5.
Deformación Especíca Volumétrica . . . . . . . . . . .
71
3.6.
Sobre el tensor de deformaciones . . . . . . . . . . . . .
72
3.7.
Direcciones principales de deformación . . . . . . . . .
∗
Vector deformación y vector rotación . . . . . . . . . .
73
74
3.8.1.
Transformación de Componentes de Rotación .
∗
Ecuaciones de Compatibilidad
. . . . . . . . . . . . .
76
3.10. Conclusión . . . . . . . . . . . . . . . . . . . . . . . . .
80
3.1.1.
3.8.
3.9.
4. Relaciones Constitutivas de un Material
77
83
4.1.
Introducción . . . . . . . . . . . . . . . . . . . . . . . .
83
4.2.
Materiales Linealmente Elásticos
85
4.2.1.
. . . . . . . . . . . .
Estado Unidimensional de Tensiones y
Deformaciones
. . . . . . . . . . . . . . . . . .
85
Contenidos
4.2.2.
4.2.3.
4.2.4.
3
Estado Tridimensional de Tensiones y
Deformaciones . . . . . . . . . . . . . . . . . . .
86
Material Elástico, Lineal e Isótropo . . . . . . .
87
Relaciones entre las direcciones principales de
tensión y de deformación en elasticidad lineal
4.3.
4.4.
.
90
Deformaciones de Origen Térmico . . . . . . . . . . . .
91
Energía Interna de Deformación . . . . . . . . . . . . .
93
4.4.1.
Denición
93
4.4.2.
Efectos Térmicos
. . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . .
95
Energía de Distorsión . . . . . . . . . . . . . . .
∗
Materiales Visco-Elásticos . . . . . . . . . . . . . . . .
96
4.4.3.
4.5.
4.6.
4.5.1.
Modelo de Kelvin . . . . . . . . . . . . . . . . .
98
4.5.2.
Modelo de Maxwell . . . . . . . . . . . . . . . .
99
Materiales Elasto-Plásticos . . . . . . . . . . . . . . . .
101
4.6.1.
Estado Uniaxial de Tensiones y Deformaciones,
Tensión de uencia . . . . . . . . . . . . . . . .
4.6.2.
ciones, Función de uencia . . . . . . . . . . . .
102
4.6.3.
Criterio de Fluencia de Rankine . . . . . . . . .
104
4.6.4.
Criterio de Fluencia de Tresca . . . . . . . . . .
105
4.6.5.
Criterio de Fluencia de von Mises . . . . . . . .
106
4.6.6.
Criterio de Fluencia de Mohr-Coulomb . . . . .
108
Criterio de Mohr-Coulomb en Hormigón 110
4.6.7.
Criterio de Fluencia de Drucker-Prager . . . . .
113
4.6.8.
Teorías de Plasticidad
. . . . . . . . . . . . . .
114
. . . . . . . . . . . . . . . . . . . . . . . . .
115
Ejercicios
5. Técnicas de Solución
5.1.
121
Ecuaciones Generales de la
Elasticidad Lineal . . . . . . . . . . . . . . . . . . . . .
5.2.
5.3.
5.4.
101
Estado Tridimensional de Tensiones y Deforma-
4.6.6.1.
4.7.
97
121
Método de los Desplazamientos,
Ecuaciones de Navier . . . . . . . . . . . . . . . . . . .
124
Formulación Integral (Formulación Débil) . . . . . . . .
127
5.3.1.
Introducción . . . . . . . . . . . . . . . . . . . .
127
5.3.2.
Funciones de prueba
127
5.3.3.
Desplazamientos virtuales y velocidades virtuales 129
5.3.4.
La integral por partes y el Principio de
. . . . . . . . . . . . . . .
Trabajos Virtuales
. . . . . . . . . . . . . . . .
129
Elasticidad Bidimensional
. . . . . . . . . . . . . . . .
131
Introducción a la Teoría de Elasticidad
4
5.4.1.
Estados Bidimensionales de Deformación (Deformación Plana) . . . . . . . . . . . . . . . . . . .
5.4.2.
134
Sólido Asilsimétrico . . . . . . . . . . . . . . . .
137
Notación matricial de los tensores involucrados . . . . .
139
5.5.1.
5.6.
Estados Bidimensionales de Tensión (Tensión Plana) . . . . . . . . . . . . . . . . . . . . . . . . .
5.4.3.
5.5.
132
Elasticidad Bidimensional
. . . . . . . . . . . .
Relaciones constitutivas
5.5.1.2.
Relaciones cinemáticas . . . . . . . . .
142
5.5.1.3.
Formulación Diferencial
. . . . . . . .
142
5.5.1.4.
Trabajos Virtuales
. . . . . . . . . . .
143
. . . . . . . . . . . . . . . . . . . . . . . . .
144
Ejercicios
. . . . . . . .
141
5.5.1.1.
141
Capítulo 1
Introducción
En este capítulo se presentan algunos elementos importantes en los
que se basa la mecánica de medios continuos y la mecánica de los sólidos como un caso particular. A continuación, se muestran los campos
de variables en términos de los cuales se escribirán las relaciones de
la mecánica de los sólidos. Se discuten las posibilidades de elección
de sistemas coordenados a los cuales referir las ecuaciones y se justica el empleo en este texto de sistemas cartesianos ortogonales. En el
capítulo también se explica la notación vectorial a ser usada, que permite simplicar la presentación. Por último se presentan nociones sobre
tensores, el operador diferencial y la integral por partes en problemas
tridimensionales.
1.1. La Mecánica Clásica de Medios Continuos
La mecánica de los medios continuos estudia los medios sólidos o uidos
desde un punto de vista macroscópico, o sea sin llegar al detalle de
estudiar el comportamiento de su microestructura o de las moléculas
que lo forman. Además, la mecánica del continuo que se discutirá en
adelante es la llamada
mecánica clásica, en oposición a la mecánica
cuántica y a la mecánica relativista, que han comenzado a desarrollarse
principalmente en el siglo XX.
En la mecánica clásica se supone que la materia está distribuida de
manera continua en el volumen del cuerpo considerado. La
posición
de la materia en el espacio se puede establecer por medio de un sistema
5
Introducción a la Teoría de Elasticidad
6
de referencia. De esta forma hablaremos de
puntos para referirnos a
las coordenadas de posición de la materia.
Asociado a lo anterior, es necesario denir el concepto de
densidad
de materia como el límite de la relación entre la masa y el volumen,
cuando el volumen considerado tiende a cero. Se hablará entonces de
densidad de la materia en el entorno de un punto y con ese sentido se
emplea la palabra
partícula (o sea, para referirnos a diferenciales del
medio continuo y no queriendo signicar una agregación de la materia
en forma discreta).
Lo anterior permite comenzar con los conceptos fundamentales de
masa y geometría y establecer relaciones diferenciales para estudiar la
variación de desplazamientos, deformaciones y tensiones en el medio
considerado.
Este texto se concentra en la mecánica de los sólidos, pero se plantean los conceptos de una manera general de modo que su extensión a
medios uidos resultaría sencilla. Tratamientos más generales desde el
punto de vista de la mecánica del continuo pueden encontrarse en la
bibliografía citada al nal de estas notas.
1.2. Las Variables Fundamentales en la Mecánica de los Sólidos
Dentro de la mecánica trabajaremos con variables que identican los
desplazamientos de puntos del cuerpo, las deformaciones y tensiones
que ocurren en el entorno de un punto y las fuerzas o acciones exteriores
sobre el cuerpo. Los desplazamientos se denen por medio de vectores,
mientras que las deformaciones y tensiones se denen por medio de
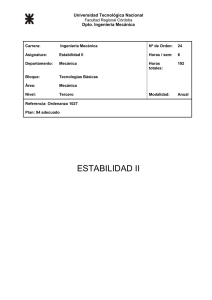
tensores. La Figura 1.1 muestra los campos de esas variables.
Más de 2000 años de trabajo en la mecánica han permitido establecer relaciones entre esos campos. En primer lugar, los campos de
deformaciones y de desplazamientos se pueden vincular entre sí y a las
relaciones que se establecen entre ellos se denominan relaciones
cine-
máticas. Estas relaciones son de tipo geométrico. En segundo lugar,
pueden relacionarse las tensiones con las fuerzas aplicadas, denominándose a estas relaciones de
equilibrio,
que son esencialmente de
tipo físico. En tercer lugar, las deformaciones y tensiones del cuerpo
se vinculan por medio de relaciones
constitutivas, así llamadas por-
Introducción
7
Campos
Vectoriales
u
F
Desplazamientos
Fuerzas
Campos
Tensoriales
ε
σ
Deformaciones
Tensiones
Variables referidas
a la geometría
Variables referidas
a la estática
Figura 1.1: Variables geométricas y mecánicas
que dependen de las propiedades del material que constituye el cuerpo.
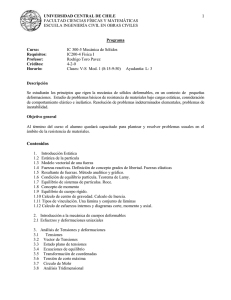
Tradicionalmente se arma que estas relaciones son de tipo experimental. La Figura 1.2 muestra lo anterior en forma sintética. En resumen,
el conocimiento de las relaciones entre las variables puede expresarse
a través de ecuaciones cinemáticas, constitutivas y de equilibrio.
Las relaciones anteriores permitirán describir el comportamiento
mecánico en el interior del cuerpo considerado, pero para denir completamente el problema es necesario establecer las llamadas condiciones
de contorno, o sea, conocer de que manera ese medio continuo está vinculado con medios exteriores a él. Esas condiciones en la mecánica de
los sólidos pueden ser de tipo cinemático, de fuerzas, de temperatura, etc. En general trabajaremos con las dos primeras, de forma que
hablaremos de condiciones de contorno geométricas y condiciones de
contorno mecánicas.
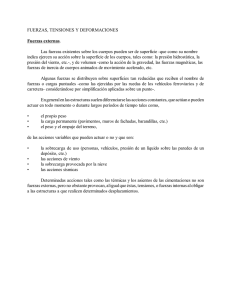
Un ejemplo sencillo de medio continuo es una barra en tracción
como la indicada en la Figura 1.3. Las fuerzas están representadas por
F,
los desplazamientos por
por
σ.
u,
las deformaciones por
ε
y las tensiones
Las ecuaciones cinemáticas en este caso son
ε=
1
u
l
(1.1)
Las de equilibrio resultan en la forma
F =σA
(1.2)
Introducción a la Teoría de Elasticidad
8
u
Relaciones
Cinemáticas
F
ε = ε(u)
σ = σ(ε)
ε
Relaciones
de Equilibrio
f = f(σ)
σ
Relaciones
Constitutivas
Figura 1.2: Relaciones entre las variables en mecánica de sólidos
Las ecuaciones constitutivas, de acuerdo a la ley de Hooke, están
dadas por
σ=Eε
(1.3)
Las tres ecuaciones 1.11.3, constituyen un sistema en el que las
incógnitas son
σ, ε
y
u
que deberán ser evaluadas a partir de la infor-
mación sobre la barra dada por l ,
A, E
y
F.
Nótese que debido a las relaciones que existen, es posible vincular
F
con
u.
En efecto,
F = σA = EεA = EA
u
l
(1.4)
Resultando una ecuación que gobierna el comportamiento del problema,
F =
EA
u
l
(1.5)
El procedimiento empleado para obtener la ecuación 1.5 se conoce
como el método de los desplazamientos y es un procedimiento estándar
para compactar la información en mecánica de los sólidos.
Aunque el método de resolución que se resume en la ecuación (1.5)
es el más conocido, no es el único, como se verá en el Capítulo 5.
Identicando las variables de este problema elemental con el planteo general de la Figura 1.1, anticipamos que
F
y
u
son vectores de
Introducción
9
l
u
F
l+u
Figura 1.3: Barra en tracción
dirección coincidente con el eje de la barra, mientras que
σ
y
ε
son las
componentes no nulas de los tensores de tensión y deformación.
1.3. Sistemas Coordenados
Para el manejo de las variables en mecánica de los sólidos, existen
en esencia dos posibilidades: la primera es trabajar sin el empleo de un
sistema coordenado especíco, de modo de establecer expresiones generales válidas para cualquier sistema coordenado. Para poder realizar
evaluaciones numéricas, estas expresiones deben ser luego particularizadas para un sistema coordenado.
La segunda posibilidad es trabajar en un sistema coordenado especíco. Esta alternativa es menos general y exige replantear las ecuaciones del problema si se necesitan para otro sistema de coordenadas.
Aunque la primera posibilidad es muy atractiva por su generalidad,
(por ejemplo, permite que las ecuaciones de láminas delgadas sean
obtenidas como particularización de las ecuaciones generales) requiere
un mayor grado de abstracción y manejo de elementos del análisis
matemático. Este tratamiento puede encontrarse, por ejemplo, en las
Referencias [2, 7, 12] y las allí indicadas.
Este texto introductorio se presenta siguiendo la segunda posibilidad, de modo que las ecuaciones se escriben en un sistema coordenado
cartesiano y ortogonal y en lo posible se mencionarán las ecuaciones
Introducción a la Teoría de Elasticidad
10
generales correspondientes. El empleo de otros sistemas coordenados
era frecuente cuando las soluciones a los problemas se buscaban exclusivamente por vía analítica. Por ejemplo, el libro de Timoshenko
[13] explora en detalle el empleo de coordenadas cartesianas, polares,
elípticas y curvilíneas de acuerdo a la aplicación que se desea resolver. Con la aparición de técnicas numéricas como diferencias nitas o
elementos nitos la formulación cartesiana recuperó su interés, dado
que es posible resolver problemas de contornos arbitrarios empleando
coordenadas de este tipo. Una excepción a lo anterior lo constituyen
las láminas delgadas, en las que tanto el planteo de las ecuaciones como
su solución numérica pueden simplicarse enormemente con el empleo
de un sistema intrínseco de coordenadas curvilíneas.
1.4. Vectores y Tensores
En los problemas de mecánica de sólidos que se presentan, intervienen diferentes tipos de elementos o entidades matemáticas, cada una de
ellos con un signicado físico determinado. Por su propio signicado físico la naturaleza de estas entidades debe ser independiente del sistema
coordenado que se elija. Como se dijo antes, se trabajará con sistemas
coordenados cartesianos y en general se emplearán las componentes de
los distintos elementos expresadas en tales sistemas cartesianos.
Los principales elementos serán tensores de diferente orden. Básicamente un tensor es un elemento matemático que representa una entidad
física y para su denición unívoca basta tener sus componentes referidas a un sistema cartesiano. Las componentes del tensor dependen del
sistema coordenado elegido y si se utilizan dos sistemas diferentes, las
componentes de un mismo tensor resultan diferentes. Sin embargo por
ser componentes de una misma entidad física, existe una relación entre
ellas que permite, conocidas las componentes referidas a un sistema
coordenado, evaluar las componentes respecto a cualquier otro. La expresión que liga las componentes referidas a dos sistemas coordenados
diferentes dene el orden del tensor.
En lo que sigue veremos algunos aspectos elementales de vectores y
tensores, pero para un tratamiento más riguroso el lector deberá usar
las referencias del álgebra de tensores [10, 11] o los capítulos introductorios al tema de las Referencias [6, 5]. Al respecto es útil denir
el símbolo
δij ,
llamado
delta de Kronecker, que toma los siguientes
Introducción
11
valores:
δij = 1
cuando
i=j
(1.6)
δij = 0
cuando
i 6= j
Visto como las componentes de una matriz, el delta de Kronecker
corresponde a la matriz identidad.
1.4.1. Tensores de orden cero y de orden uno
Los tensores más sencillos son los de menor orden. Las magnitudes
escalares, que no dependen del sistema coordenado elegido, son tensores
de orden 0. Ejemplos de ello son la temperatura, la densidad, la energía
interna, la energía cinética, etc.
Le siguen en orden de complejidad los vectores. Resulta ilustrativo
imaginar un vector
v
como un segmento orientado en un espacio tri-
dimensional. Las componentes de este vector
v
coordenado denido por una terna ortonormal
referidas a un sistema
(t1 , t2 , t3 )1
resultan de
proyectar el vector sobre cada versor de la terna
vi = ti · v = v · ti
(1.7)
donde el operador · (producto punto) indica la proyección del operando de la izquierda (v) sobre el operando de la derecha (ti ). Una
forma conveniente de expresar la proyección es transponer el operador
de la izquierda, es decir escribir la ecuación 1.7 como
vi = tTi v
(1.8)
Denida una base (la terna ortonormal) se puede escribir un vector
en función de sus componentes como una lista ordenada de sus componentes. Aquí se usarán corchetes para delimitar las componentes que
se ordenarán verticalmente (vector columna)
v1
vt = v 2
v3
1 Una
(1.9)
terna ortonormal es aquella en que los vectores que la denen son de
longitud unitaria (versores) y ortogonales entre sí ti · tj = δij
Introducción a la Teoría de Elasticidad
12
donde el subíndice
t
indica que son las componentes respecto a dicha
base. En general si se trabaja con una única base, o no hay posibilidades de confusión se prescinde del subíndice, por lo cual
v
hace refe-
rencia indistintamente a un vector y a sus componentes en el sistema
coordenado en que se está trabajando.
Dada la ortonormalidad de la base,
sumatoria
ve =
3
X
i=1
donde
e
v
puede escribirse como la
v1
vi ti = [t1 , t2 , t3 ] v2
v3
(1.10)
indica la base canónica, es decir la base respecto de la cual
están escritas las componentes de los
ti .
Tres direcciones ortogonales ordenadas (es decir una terna derecha) se pueden expresar como una matriz que representa un conjunto
particular de ejes cartesianos en un punto
T = [t1 , t2 , t3 ]
luego el vector
(1.11)
ve (1.10) puede verse como el producto entre una matriz
y un vector
ve = Tvt
(1.12)
v respecto a una terna ortonormal diferente,
por ejemplo una terna L = [l1 , l2 , l3 ], basta proyectarlo sobre cada
0
componente de ella. Denominando con vj las componentes referidos a
Si se quiere expresar
la nueva terna, se tendrá:
vj0 = lj · v = lTj v
(1.13)
T
vl = L v
(1.14)
A continuación buscamos relacionar las componentes del vector en el
sistema
vl
ti
con las componentes en el sistema
lj .
Para ello escribimos
en la 1.14 usando la 1.12, y queda
vl = LT (Tvt ) = LT Tvt
A la proyección de cada versor de la terna original
(1.15)
ti
sobre cada versor
de la nueva terna lj se la denotará por
λij = lj · ti = lTj ti = tTi lj
(1.16)
Introducción
13
Nótese que en el segundo miembro tenemos el producto escalar de
dos vectores de módulo unitario; por lo tanto, el signicado de
λij
en el primer miembro es el coseno del ángulo comprendido entre las
direcciones
ti
y lj . que son las componentes de la matriz
Λ = TT L
(1.17)
Cada versor de la base original puede escribirse en función de la nueva
terna multiplicando la ecuación (1.16) por lj y sumando
ti =
3
X
λij lj
(1.18)
j=1
que escrita para los tres vectores
ti
simultáneamente es
T = ΛL
(1.19)
Recíprocamente, por la conmutatividad del producto punto entre
vectores, se tiene
L = ΛT T
(1.20)
v l = Λ T vt
(1.21)
luego
Se dice que
v
es un tensor de
primer orden porque en la expresión
un coeciente (λij ) multipli-
que transforma sus componentes aparece
cando a cada componente.
Ejemplos de vectores son el campo gravitatorio, una fuerza, la velocidad de una partícula (nótese que los distintos sistemas cartesianos
que se tratan aquí están jos en el tiempo y en el espacio), los desplazamientos, etc.
1.4.2. Tensores de orden dos
De acuerdo a lo visto en la sección anterior, se puede pensar entonces a un tensor de primer orden como a una entidad física que a
cada dirección del espacio le asocia un escalar (su componente o proyección). Por extensión, puede interpretarse a un tensor de segundo
orden como a una entidad física que a cada dirección del espacio le
asigna un vector, como la componente (proyección) del tensor en esa
dirección.
Introducción a la Teoría de Elasticidad
14
Sea
σ̄
un tensor de segundo orden para el que aún no hemos usado
ningún sistema de referencia y sea el vector
σ̄
La componente del tensor
sobre
ν
ν
en la dirección
una dirección cualquiera.
ν
(en forma similar al caso de vectores)
resulta de proyectar
2
σ ν = σ̄ · ν = σ̄ T ν
σ̄
(1.22)
En la ecuación 1.22 hemos usado la denición que el producto punto
de un tensor de segundo orden por un tensor de primer orden es un
tensor de primer orden.
Para un sistema cartesiano
T = (t1 , t2 , t3 )
se tendrán vectores
que son las componentes cartesianas del tensor de segundo orden
σ i = σ̄ · ti = σ̄ T ti
A su vez el vector
σi
σ̄
(1.23)
σ i puede escribirse en función de sus componentes
σij al resultado del
sobre el sistema cartesiano elegido. Llamaremos
producto escalar
σ i · tj = σ Ti tj = tTj σ i = tTi σ̄tj = σij
tj
Multiplicando ambos miembros por
3
X
tj
tTj σ i
=
j=1
3
X
tj tTj
(1.24)
y sumando se obtiene
σi = σi =
j=1
3
X
σij tj
(1.25)
j=1
P3
T
j=1 tj tj = 1 es igual a la identidad)
Diremos que las σij son las componentes de σ̄ respecto al sistema
(la suma indicada
cartesiano elegido. La expresión del tensor en función de sus componentes resulta entonces:
σ̄ =
3
X
ti σ Ti
=
i=1
3 X
3
X
ti tTj σij
(1.26)
i=1 j=1
2 El
símbolo · usado indica que debe contraerse un índice entre los elementos
involucrados, así en el caso que se use entre dos vectores se obtiene el tradicional
producto escalar
X
a·b=
ai bi
i
si es entre un vector y un tensor se obtiene un vector, lo cual puede verse como
una multiplicación entre una matriz (las componentes del tensor) y un vector
σ·ν =
X
i,j
σij νj ti
Introducción
15
Esta expresión es equivalente a la 1.10 para vectores. Nótese que aquí
T
aparece el producto de dos versores ti tj que
es un escalar, sino que
es un producto denominado tensorial (es decir da lugar a un tensor).
T
T
Este producto tensorial no es conmutativo, es decir ti tj 6= tj ti . En
T
la literatura se lo suele denominar por ti tj = ti ⊗ tj y se cumple que
P3
para una terna ortonormal que
i=1 ti ⊗ ti = 1.
T
La expresión 1.26 implica la suma de nueve tensores ti tj escalados
por las componentes σij . Estos escalares son, como se anticipara antes,
no
las componentes del tensor respecto al sistema cartesiano
(t1 , t2 , t3 ).
Trabajando exclusivamente con las componentes, las expresión 1.22
puede escribirse de la siguiente manera
σν1
σ11 σ21 σ31
ν1
σν2 = σ12 σ22 σ32 ν2
σν3
σ13 σ23 σ33
ν3
(1.27)
Particularizando para una cualquiera de las direcciones coordenadas, sus componentes serán
σi1
σ i = σi2
σi3
(1.28)
σ̄ en componentes respecto a un nuevo sistema coordenado (l1 , l2 , l3 ), relacionado con el anterior por 1.19 basta
reemplazar los versores ti en la ecuación 1.26
!
!
3 X
3
3 X
3
3
3
X
X
X
X
T
T
σ̄ =
ti tj σij =
λim lm
λjn ln σij
Si se desea expresar
i=1 j=1
=
3
X
3
X
i=1 j=1
lm lTn
m=1 n=1
λim λjn σij
σ̄
n=1
=
3
X
3
X
0
lm lTn σmn
(1.29)
m=1 n=1
i=1 j=1
donde se ha denominado por
segundo orden
m=1
!
3 X
3
X
0
σmn
a las componentes del tensor de
referidas al sistema coordenado cartesiano li .
Luego las componentes de
0
σmn
=
σ̄
referidas a la nueva base son
3
3 X
X
i=1 j=1
λim λjn σij
(1.30)
Introducción a la Teoría de Elasticidad
16
Se puede ver que son necesarios
dos
coecientes para expresar las
componentes en el nuevo sistema de coordenadas y por ello se dice que
el tensor es de
segundo orden. La última expresión permite escribir la
relación entre componentes en distintos sistemas coordenados mediante
la siguiente multiplicación de matrices
0
0
0
λ11 λ12 λ13
σ11 σ12 σ13
σ11
σ12
σ13
λ11 λ21 λ31
0
0
0 = λ
σ21
σ22
σ23
12 λ22 λ32 σ21 σ22 σ23 λ21 λ22 λ23
0
0
0
λ31 λ32 λ33
σ31 σ32 σ33
σ31 σ32 σ33
λ13 λ23 λ33
(1.31)
Como en el caso de la ecuación 1.14 de vectores en este caso
σij
0
σmn
y
representan las componentes del mismo tensor en distintos sistemas
coordenados.
Queda claro entonces que las componentes escalares de un tensor
de segundo orden se obtienen mediante una doble proyección
σij = (σ̄ · ti ) · tj = (σ̄ · ti )T tj = σ̄ T ti
T
tj = tTi σ̄tj
(1.32)
1.4.3. Ejemplo de tensor de segundo orden
Ejemplos de tensores de segundo orden se verán en los próximos
capítulos. Un ejemplo sencillo corresponde al tensor de inercia (momentos de inercia considerados en cursos de Mecánica Analítica y Resistencia de Materiales) de un sólido respecto al centro de coordenadas.
Si se conocen los momentos de inercia del sólido respecto a un sistema
cartesiano dado
(t1 , t2 , t3 )
ˆ
ρ xi xj dV
Iij =
(1.33)
V
y se desean conocer los momentos de inercia respecto a un nuevo sistema cartesiano
(l1 , l2 , l3 )
relacionado con el anterior de forma tal que
el vector posición está denido por
r=
3
X
i=1
xi ti =
3
X
i=1
xi
3
X
j=1
λij lj =
3
X
j=1
yj lj
(1.34)
Introducción
17
entonces es posible expresar
ˆ
ˆ
0
Imn
ρ ym yn dV =
=
ρ
V
=
3 X
3
X
V
3 X
3
X
ρ xi xj dV =
λim λjn
(1.35)
i=1 j=1
ˆ
V
i=1 j=1
(λim xi λjn xj ) dV
3 X
3
X
λim λjn Iij
i=1 j=1
Esto demuestra que el tensor de inercia es un tensor de segundo orden.
Puede entonces decirse que las
Ī =
3 X
3
X
Iij
son las componentes de un tensor
Iij ti tTj =
j=1 i=1
3 X
3
X
0
Imn
lm lTn
(1.36)
m=1 n=1
Finalmente mencionaremos aquí que en algunos capítulos será necesario emplear tensores de orden superior, como tensores de cuarto
orden. Estos tensores aparecen en el Capítulo 4, cuando se relacionan
tensores de segundo orden entre sí.
1.5. Operador Diferencial: Gradiente y Divergencia
Para trabajar con ecuaciones en derivadas parciales resulta útil denir
un operador
∇ que agrupe las derivadas parciales respecto a cada una
de las variables espaciales
3
X ∂
∂
∂
∂
∇=
t1 +
t2 +
t3 =
ti
∂X1
∂X2
∂X3
∂Xi
i=1
(1.37)
Este operador se denomina Nabla y permite escribir en forma compacta algunas operaciones sobre tensores. El operador
∇
puede refe-
rirse a derivadas parciales con respecto a otro sistema coordenado, en
cuyo caso resulta
3
X ∂
∂
∂
∂
∇=
l1 +
l2 +
l3 =
lj
∂Y1
∂Y2
∂Y3
∂Yj
j=1
(1.38)
Introducción a la Teoría de Elasticidad
18
Este operador tiene la forma de un vector y en general puede interpretarse como tal. Escrito en componentes se tiene
∂
∂X1
∂
∂X2
∂
∂X3
∇t =
donde usamos un subíndice
∇l =
t
o
l
∂
∂Y1
∂
∂Y2
∂
∂Y3
(1.39)
para denotar respecto a que terna
está referido.
Nótese que por ser
∇
un vector sus componentes respecto a una
terna pueden también escribirse respecto a otra
3
3 X
3
3
X
X
X
∂
∂
∂
∇=
ti =
λij lj =
lj
∂X
∂X
∂Y
i
i
j
i=1
j=1 i=1
j=1
(1.40)
donde las derivadas parciales cumplen la relación
3
X
∂
∂
=
λij
∂Yj
∂Xi
i=1
En forma matricial, la ecuación anterior resulta
∂
∂Y1
∂
∂Y2
∂
∂Y3
λ11 λ21 λ31
= λ12 λ22 λ32
λ13 λ23 λ33
∂
∂X1
∂
∂X2
∂
∂X3
(1.41)
Veamos como se aplica el operador sobre escalares, vectores y tensores de segundo orden.
(a) El operador
∇
aplicado sobre un campo escalar
de orden 0) conduce al vector gradiente de
a,
a (X)
(tensor
que es un tensor de
primer orden
3
X ∂a
∂a
∂a
∂a
∇a =
t1 +
t2 +
t3 =
ti
∂X1
∂X2
∂X3
∂Xi
i=1
(1.42)
Introducción
19
Para otro sistema coordenado se tiene
3
X
∂a
∇a =
lj
∂Yj
j=1
(1.43)
Usando las dos ecuaciones anteriores se puede escribir la 1.41 como
∂a
∂X1
∂a
∂X2
∂a
∂X3
λ11 λ12 λ13
= λ21 λ22 λ23
λ31 λ32 λ33
∂a
∂Y1
∂a
∂Y2
∂a
∂Y3
(1.44)
(b) Para el caso de tensores de primer orden (vectores) hay dos
formas de aplicar el operador Nabla
1. Se puede aplicar
∇
sobre un vector en forma similar al caso de
escalares, lo que conduce al gradiente de un campo vectorial
que por conveniencia se dene como
3
X ∂ (vj tj )
X ∂vj
X ∂v
.
T
tTi =
tTi =
tj tTi
gradv = ∇v = v∇ =
∂X
∂X
∂X
i
i
i
i,j
i,j
i=1
(1.45)
cuyas componentes quedan denidas por
(∇t v)ji =
∂vj
∂Xi
(1.46)
En otro sistema coordenado el gradiente se computa como
∇v =
X ∂v 0
m
m,n
∂Yn
lm lTn
(1.47)
En general se supondrá que el sistema coordenado es jo y no se
utilizará el subíndice en
∇t .
2. La segunda forma de aplicar el operador Nabla sobre un vector
es mediante el operador proyección o producto punto · que da
Introducción a la Teoría de Elasticidad
20
lugar a la divergencia del vector:
∇·v =
3 X
3
X
j=1 i=1
3
3
∂ (vj tj ) X X ∂vj
=
(ti · tj )
ti ·
∂Xi
∂X
i
j=1 i=1
3 X
3
3
X
X
∂vj
∂vi
=
δij =
= div (v)
∂Xi
∂Xi
j=1 i=1
i=1
(1.48)
(c) En el caso de tensores de segundo orden interesa principalmente el
segundo caso de lo visto para vectores. Resulta así la divergencia de
un tensor de segundo orden:
3
X
∂
∇ · σ̄ =
ti ·
∂X
i
i=1
=
3 X
3 X
3
X
i=1 j=1 k=1
En componentes
3 X
3
X
!
σjk tj tTk
=
j=1 k=1
i=1 j=1 k=1
∂σjk
δij tk =
∂Xi
∇t · σ̄
3 X
3 X
3
X
∂σjk
3 X
3
X
i=1 k=1
∂Xi
(ti · tj ) tk
∂σik
tk
∂Xi
(1.49)
resulta lo siguiente
3
X
i=1
∂σi1
∂Xi
∂σi2
∂Xi
∂σi3
∂Xi
(1.50)
En resumen, el gradiente de un tensor aumenta el orden de ese
tensor; mientras que la divergencia de un tensor disminuye el orden.
1.6. Teorema de la Divergencia. Integral por
Partes.
El teorema de Gauss o de la Divergencia expresa, bajo ciertas condiciones, una integral de volumen en términos de una integral sobre
la supercie frontera de ese volumen. Dado un campo vectorial
u (x);
este teorema expresa que la integral en el volumen (V ) de la divergencia del vector es igual al ujo del vector a través del contorno (A) del
Introducción
21
volumen, es decir
ˆ
ˆ
∇ · u dV =
V
donde
ν
ˆ
div (u)
(u · ν) dA
dV =
V
(1.51)
A
es la normal saliente al contorno. Escrito en componentes
resulta
3 ˆ
X
3
V
i=1
X
∂ui
dV =
∂Xi
i=1
ˆ
ui νi dA
En forma similar puede escribirse para un tensor
ˆ
(1.52)
A
S̄
que
ˆ
S̄ · ν dA
∇ · S̄ dV =
V
3 ˆ X
3
X
∂ (Sik )
tk dV =
∂X
i
V
i=1
k=1
A
3 ˆ
X
i=1
3
X
(1.53)
(Sik · νi ) tk dA
A k=1
Escrito en componentes resulta
ˆ X
3
V i=1
∂Si1
∂Xi
∂Si2
∂Xi
∂Si3
∂Xi
ˆ X
3
Si1 νi
Si2 νi dA
dV =
A i=1
Si3 νi
(1.54)
w un vector arbitrario. Podemos aplicar la ecuación
u = S̄ w, previamente notemos que
X ∂Sij
X ∂
∂wj
∇ · (S̄w) =
(Sij wj ) tj =
wj + Sij
tj
∂Xi
∂Xi
∂Xi
i,j
i,j
X ∂Sij X ∂wj
=
wj
tj +
Sij tj
∂X
∂X
i
i
i,j
i,j
Sea entonces
1.51 al producto
= w · ∇ · S̄T + ∇w : S̄T
(1.55)
3
donde el símbolo : indica una doble suma , luego reemplazado en el
3 en
este caso debe sumarse sobre dos índices. En el caso de dos elementos con
dos subíndices cada uno el resultado es un escalar, por ejemplo si son dos tensores
Introducción a la Teoría de Elasticidad
22
teorema de Gauss 1.51 se tiene
ˆ
T
T
w · ∇ · S̄ + ∇w : S̄ dV =
S̄ w · ν dA
V
A
X ˆ ∂Sij
Xˆ
∂wj
wj
+
Sij dV =
(Sij wj ) νi dA
∂X
∂X
i
i
V
A
i,j
i,j
ˆ
(1.56)
(1.57)
El segundo miembro de 1.56 puede a su vez reescribirse como
ˆ
ˆ
wT S̄T ν dA
S̄ w · ν dA =
A
3 ˆ X
3
X
i=1
(Sij wj ) νi dA =
A
3
Xˆ
A j=1
i=1
3
X
wj (Sij νi ) dA
(1.58)
(1.59)
A j=1
Resumiendo resulta la forma útil como integral por partes
ˆ
ˆ
ˆ
T
T
w · ∇ · S̄ dV +
wT S̄T ν dA
(1.60)
v
v
A
ˆ
X ˆ
X ˆ ∂wj
∂Sij
Sij dV =
−
wj
dV +
wj (Sij νi ) dA
∂x
∂x
i
i
V
A
V
i,j
i,j
∇w : S̄ dV = −
(1.61)
La última expresión puede particularizarse para el caso de que el
S̄ sea simétrico S̄ = S̄T (en componentes signica que Sij = Sji ).
tensor
Luego si reescribimos
∂wj
1 ∂wj ∂wi
1 ∂wj
∂wi
=
+
+
−
(1.62)
∂xi
2 ∂xi
∂xj
2 ∂xi
∂xj
1
1
∇w + ∇T w +
∇w − ∇T w = ∇sim w + ∇asim w
∇w =
2
2
(1.63)
de segundo orden
σ:ε=
X
σij εij
i,j
Si es el caso de un elemento con cuatro subíndices (un tensor de cuarto orden)
con un tensor de segundo orden, el resultado es un tensor de segundo orden
σij =
X
Cijkl εkl
k,l
σ=C:ε
Introducción
23
donde se ha descompuesto el gradiente del vector en sus componentes
simétrica y antisimétrica. Entonces debido a la hipótesis de simetría
de
S̄
resulta que
1 ∂wj ∂wi
1 ∂wj
∂wi
+
+
−
Sij
2 ∂xi
∂xj
2 ∂xi
∂xj
1 ∂wj ∂wi
=
+
Sij
2 ∂xi
∂xj
∇w : S̄ = ∇sim w : S̄
∂wj
Sij =
∂xi
(1.64)
(1.65)
Llevando este resultado a 1.60 se obtiene
X ˆ 1 ∂wj ∂wi X ˆ
∂Sij
+
dV
Sij dV =
−
wj
2
∂x
∂x
∂x
i
j
i
V
V
i,j
i,j
ˆ
+ wj (Sij νi ) dA
A
ˆ
ˆ
ˆ
sim
S̄ : ∇ wdV = −
∇ · S̄ · wdV +
wT S̄ν dA
v
v
A
(1.66)
Esta expresión se denominará
identidad fundamental
que será de
utilidad al estudiar el principio de trabajos virtuales en el Capítulo 5.
1.7. Contenidos de Estas Notas
En los dos capítulos siguientes se estudian formulaciones generales
de tensiones y deformaciones, con énfasis en problemas lineales. En el
Capítulo 2 se denen vectores y tensores de tensión, sus propiedades
y características. Las ecuaciones de equilibrio de fuerzas y momentos
son parte fundamental del capítulo. En el Capítulo 3 se denen desplazamientos, deformaciones especícas y el tensor de deformaciones.
También se estudian las características y propiedades de esas entidades. Las ecuaciones centrales son aquí son las cinemáticas y de compatibilidad. El Capítulo 4 trata de modelos de materiales elásticos y
los límites de validez tal como los suponen las supercies de uencia.
Los elementos de los Capítulos 2 a 4 se combinan en el Capítulo 5 para plantear métodos de resolución que permitan una formulación más
compacta. Allí se establecen formulaciones diferenciales y en particular
24
Introducción a la Teoría de Elasticidad
se explora el método de desplazamientos y luego se introducen las formulaciones integrales como una alternativamente conveniente para las
técnicas de solución. Finalmente se denen los estados de elasticidad
bidimensional.
Capítulo 2
Análisis General de Tensiones
En este capítulo se denen los estados tensionales en el entorno de
un punto a través del tensor de tensiones y se demuestra que efectivamente se tiene un tensor de segundo orden. Para planos que pasan
por un punto se obtiene el vector tensión y sus componentes y se lo
relaciona con el tensor de tensiones. Las condiciones de simetría del
tensor se demuestran y se deducen condiciones de reciprocidad entre
vectores tensión. Se discute el problema de direcciones principales y
valores principales de tensión y sus interpretaciones grácas conocidas
como Círculos de Mohr. Se presenta una descomposición del tensor
de tensiones en componentes esféricas y desviadoras. Finalmente, se
escriben las ecuaciones de equilibrio y de contorno de fuerzas.
2.1. Concepto de Tensión Asociada a un
Plano
Consideremos un cuerpo sólido arbitrario en tres dimensiones, como
el representado en la Figura 2.1, en el cual se busca poner de maniesto
el estado de tensiones que existe en un plano determinado
se encuentra la intersección del cuerpo con el plano
α
α. Para ello
y se separa
imaginariamente una de las mitades en que el cuerpo queda dividido.
α se usará el versor ν normal al mismo y se
ν es positivo cuando su sentido es saliente del
cuerpo. Dentro del plano α se individualiza un elemento de área ∆A,
de modo de observar allí el estado tensional. Sobre el área ∆A deberá
actuar una fuerza ∆F que representa la interacción entre la mitad
Para caracterizar al plano
adopta la convención que
25
Introducción a la Teoría de Elasticidad
26
Figura 2.1: Vector tensión
eliminada del cuerpo y la que conservamos para su estudio. Dado que
∆F
puede ser variable en
∆A
tomaremos a la relación
∆F/∆A
como
un valor medio de fuerza por unidad de área.
De acuerdo con el principio de tensión (formulado por A. Cauchy
en 1822), si el área
∆A tiende a cero, entonces la fuerza por unidad de
área tiende a un valor denido, que llamaremos tensión, de modo que
σν =
dF
dA
(2.1)
σ ν es un vector que representa el estado de tensiones en el plano normal
a ν y se denomina vector tensión. Nótese que la intensidad y el sentido
del vector tensión varían de punto a punto en el plano, de modo que
en general la dirección de
σν
no es coincidente con la de
ν . Además, si
consideramos un punto del cuerpo y por allí hacemos pasar dos planos,
cada uno tendrá un vector de tensión diferente.
Cada vector tensión puede descomponerse en dos componentes: una
contenida en el plano
α,
que se denominara
α, que se denominará σνs y otra normal al plano
σνν . En forma vectorial puede escribirse
σ ν = σνν ν + σνs s
donde
ν
el plano
es el versor normal al plano
α,
y
s
es un versor contenido en
como se muestra en la Figura 2.2. La ecuación 2.2 permite
evaluar el vector
plano.
α
(2.2)
σν
dadas sus componentes normal y tangencial al
Análisis General de Tensiones
27
Figura 2.2: Componentes del vector tensión
2.2. El Tensor de Tensiones
Considérese un cuerpo arbitrario en tres dimensiones, representado
en la Figura 2.3, en el cual se busca poner de maniesto el estado
de tensiones que existe en el entorno de un punto determinado del
cuerpo,
O.
Para individualizar el punto se usará un sistema cartesiano
ortogonal como el indicado en la Figura 2.3, por simplicidad y sin falta
de generalidad, se hará coincidir el origen de los ejes con el punto
O.
Figura 2.3: Componentes cartesianas de tensión
Con el n de poner en evidencia el estado tensional en el entorno del
punto
O, se supondrá un elemento cúbico cuyos lados son diferenciales
(también llamado cubo elemental), en el que tres de sus caras coinciden
con planos coordenados. Cada cara del cubo está contenida en un plano
Introducción a la Teoría de Elasticidad
28
cuya normal
t
es paralela a ejes coordenados: por ejemplo, la cara
contenida en el plano que denen
que es paralelo a
X3
X1
y
X2
tendrá por normal a
t3 ,
y en sentido saliente del cubo. Para cada cara se
adoptará signo positivo si el sentido de su vector normal coincide con
el sentido positivo del eje al cual es paralelo.
σ i : por ejem+t2 actuará σ 2 dA2 y sobre la cara
opuesta, normal a −t2 actuará −σ 2 dA. Nótese que como se están conSobre cada cara del cubo actúa un vector tensión
plo, sobre la cara cuya normal es
siderando tensiones en el entorno de un punto no interesa la variación
de tensiones que puede haber entre caras opuestas, de modo que por
estar tan próximas las caras no hay que distinguir entre las tensiones
en una cara y su opuesta salvo que tienen dirección opuesta. La variación de tensiones entre caras se tomará en cuenta para las ecuaciones
diferenciales de equilibrio.
En la sección anterior se mencionó que cada vector tensión tiene dos
componentes: por ejemplo, el vector
al plano a
su vez,
y
X3
σ2s
σ22
σ2
y tiene una componente
tiene por componente normal
σ2s
contenida en el plano. A
tiene dos componentes, en las direcciones coordenadas
del plano y las denominaremos
σ21
y
σ23
X1
respectivamente. Las
componentes cartesianas de cada vector tensión sobre las caras del
cubo se representan en la Figura 2.4 y son:
para
para
para
σ 1 −→ σ11
σ 2 −→ σ21
σ 3 −→ σ31
σ12
σ22
σ32
σ13
σ23
σ33
Cuando los dos índices son iguales, se tendrán componentes normales de tensión y cuando sean distintos se tendrán componentes cortantes
o tangenciales de tensión.
Habiendo denominado con
X2 , X3
t1 , t2 , t3
a los versores en dirección
X1 ,
respectivamente (Figura 2.3), cada vector tensión sobre caras
coordenadas podrá escribirse como
σ 1 = σ11 t1 + σ12 t2 + σ13 t3
σ 2 = σ21 t1 + σ22 t2 + σ23 t3
σ 3 = σ31 t1 + σ32 t2 + σ33 t3
(2.3)
Análisis General de Tensiones
29
Figura 2.4: Componentes del tensor de tensiones
O en forma genérica (en donde el índice jo
σi =
3
X
i
toma valores de
σij tj
1
a
3)
(2.4)
j=1
Del estudio del estado tensional en el entorno de un punto se obtuvieron nueve componentes cartesianas, que se pueden escribir en forma
de matriz
3 × 3:
σ11 σ12 σ13
[σij ] = σ21 σ22 σ23
σ31 σ32 σ33
En la Sección 2.5 se demostrará formalmente que
(2.5)
σij
constituye un
tensor de tensiones y en lo sucesivo se lo denominará de esa manera.
2.3. Relaciones entre el Vector de Tensión
y el Tensor de Tensiones
σij y los
O, cuya normal
Para estudiar la relación que existe entre las componentes
vectores
σν
llamaremos
por
O,
se hará pasar un plano oblicuo por el punto
ν
(ver Figura 2.5). El plano oblicuo que en realidad pasa
ha sido desplazado en la Figura 2.5 con el objeto de denir un
tetraedro elemental cuyos lados ortogonales son diferenciales.
Introducción a la Teoría de Elasticidad
30
Figura 2.5: Equilibrio de un tetraedro elemental
Consideremos la tensión
tensiones
σ1, σ2, σ3
σν
actuando sobre el plano oblicuo y las
actuando sobre los planos coordenados. La con-
dición de equilibrio de fuerzas en el tetraedro puede expresarse como
σ ν dA − σ 1 dA1 − σ 2 dA2 − σ 3 dA3 = 0
Cada área
(2.6)
dAi puede evaluarse proyectando el área oblicua dA sobre
el plano coordenado correspondiente, de modo que
dAi = dA νi
donde
νi
dAi (ν
y
(2.7)
es el coseno del ángulo que existe entre las normales a
ti ).
ν
Nótese que el versor
dA
tiene componentes cartesianas
y
νi
tal que
ν=
3
X
i=1
ν1
νi ti = [t1 , t2 , t3 ] ν2
ν3
(2.8)
Reemplazando la ecuación 2.7 en la 2.6 resulta
σ ν dA −
3
X
σ i νi dA = 0
(2.9)
i=1
Simplicando el factor común
σν −
dA
3
X
i=1
se llega a
σ i νi = 0
(2.10)
Análisis General de Tensiones
31
o bien
σν =
3
X
σ i νi
(2.11)
i=1
Reemplazando la ecuación 2.4 en la 2.11 se tiene nalmente
σν =
3 X
3
X
σij νi tj
(2.12)
i=1 j=1
a su vez la ecuación 2.11 escrita matricialmente es sencillamente
σν = σT ν
es decir la proyección del tensor
σ
(2.13)
sobre la dirección
ν.
La ecuación 2.13 se conoce como fórmula de Cauchy y permite
σ ν dadas las componentes del tensor de
ν . De modo que el tensor σ en un punto
σ ν que actúan sobre planos que pasan por
encontrar el vector de tensión
tensiones
σij
y la dirección
resume a todos los vectores
ese punto.
σνν y σνs de la ecuación 2.2 también pueden ser
escritas en función de σij : la componente normal se puede obtener
proyectando σ ν sobre la dirección ν
Las componentes
σνν = σ ν · ν
(2.14)
Usando la ecuación 2.13 se tiene
σνν = σ T ν · ν = ν T σν
(2.15)
Escrito desarrollado
σνν =
3 X
3
X
σij νi νj
(2.16)
i=1 j=1
La componente tangencial
σνs
se obtiene a partir de la suma de
módulos siguiente:
2
2
= |σ ν |2 − σνν
σνs
En la ecuación anterior, el módulo del vector
(2.17)
σν
se puede evaluar a
partir de la ecuación 2.11 como
|σ ν |2 = σ ν · σ ν = ν T σσ T ν
(2.18)
Introducción a la Teoría de Elasticidad
32
2
|σν | =
3 X
3 X
3
X
σik σjk νi νj
(2.19)
i=1 j=1 k=1
Reemplazando las ecuaciones 2.18 y la 2.15 en la 2.17 resulta
2
σνs
= ν T σσ T ν − ν T σν
2
(2.20)
2.4. Propiedades del Vector de Tensión
2.4.1. Transformación de Tensiones con Cambio de
Ejes Coordenados.
Si se conocen los componentes de un tensor de tensiones
das a ejes de referencia
a un sistema nuevo
un vector
σνi
Yi .
Xi
σij
asocia-
es posible evaluar las componentes referidas
También es posible evaluar las componentes de
en el nuevo sistema.
Figura 2.6: Transformación de sistemas coordenados
Sean
li
los versores del sistema
Dado que cada
ti
Yi ;
y
ti
Xi .
Yi a
los versores de sistema
es un vector, podrá expresarse en el sistema
través de relaciones del tipo
ti =
3
X
j=1
λij lj
(2.21)
Análisis General de Tensiones
donde
λij = ti ·lj
33
son las proyecciones de
ti en las direcciones lj . Escrita
en forma matricial, la ecuación 2.21 será
t1 t2 t3
=
l1 l2 l3
λ11 λ21 λ31
λ12 λ22 λ32
λ13 λ23 λ33
T = LΛT
(2.22)
(2.23)
o
T
λ11 λ12 λ13
tT1
l1
tT2 = λ21 λ22 λ23 lT2
tT3
λ31 λ32 λ33
lT3
(2.24)
TT = ΛLT
λij
(2.25)
son entonces las componentes de una matriz
matriz de rotación.
Λ
Λ
que se llamará
es una matriz ortogonal, cuya inversa es igual a
su transpuesta, de modo que invirtiendo la 2.23 se llega a
lm =
3
X
λnm tn
(2.26)
n=1
L = TΛ
(2.27)
Consideremos en primer lugar un vector
sistema
Xi , σ ν
σν
arbitrario. Referido al
se escribe como
σν =
3
X
i=1
Si se lo reere al sistema
σν =
σν1
σνi ti = T σν2
σν3
Yi , σ ν
3
X
j=1
(2.28)
se escribirá como
0
σν1
0
lj = L σν2
0
σν3
0
σνj
(2.29)
donde el prima indica componentes en el nuevo sistema Yi . En general,
0
σνi 6= σνj
, pero como se trata de un único vector σ ν debe cumplirse
que
0
σν1
σν1
0
σ ν = T σν2 = L σν2
(2.30)
0
σν3
σν3
Introducción a la Teoría de Elasticidad
34
De acuerdo con la 2.23 se reemplazan los
0
σν1
σν1
T
0
σ
LΛ
= L σν2
ν2
0
σν3
σν3
(2.31)
0
σν1
σν1
0
σν2
= ΛT σν2
0
σν3
σν3
(2.32)
o bien
ti resultando
La ecuación anterior muestra como se expresan las componentes de
un vector
σν
cuando se cambia el sistema de referencia. De modo que
en el sistema original Xi , se pueden
0
encontrar las nuevas componentes σνj empleando los cosenos directores. Nótese que la ecuación 2.32 contiene un solo coseno director en
conociendo las componentes
σνi
cada término, que es la característica de transformación de un vector,
o tensor de primer orden.
2.4.2. Condición de Reciprocidad de Vectores Tensión.
Por un punto de un sólido se consideraran dos planos, cuyas normales
ν y µ. Asociados a esos planos existirán
σ ν y σ µ , como se muestra en la Figura 2.7.
sean
Se demostrará que la proyección del vector
igual a la proyección del vector
σµ
los vectores de tensión
σν
sobre la normal
sobre la normal
ν.
µ es
Analíticamente
esta condición puede escribirse a través de los productos escalares
σν · µ = σµ · ν
(2.33)
Para demostrarlo se evaluará cada miembro de 2.33 por separado.
T
Para el miembro de la izquierda y recordando que σ µ = σ µ de la
2.13 resulta
σµ · ν = ν T σT µ
(2.34)
σ ν · µ = µT σ T ν = ν T σµ
(2.35)
De igual manera,
Para que las últimas dos expresiones coincidan es necesario que
σT = σ,
es decir que
σij = σji ,
que se demostrará en las propiedades
Análisis General de Tensiones
35
Figura 2.7: Reciprocidad de vectores de tensión
del tensor de tensiones, de donde
σµ · ν = σν · µ
(2.36)
que es la ecuación 2.33 propuesta.
Nótese que el valor resultante del producto escalar no es una constante o invariante del estado tensional del sólido en ese punto, sino que
depende de los dos planos especícos considerados.
2.5. Propiedades del Tensor de Tensiones
2.5.1. Simetría del Tensor de Tensiones
El tensor de tensiones denido anteriormente tiene en principio nueve componentes cartesianas. Una propiedad fundamental de ese tensor
de tensiones es que sus componentes son simétricas, o sea satisfacen la
condición
σij = σji
(2.37)
La demostración de esa propiedad se verá en la sección de equilibrio
σ y σT .
de momentos. Además de aquí en más no se distinguirá entre
Introducción a la Teoría de Elasticidad
36
2.5.2. Transformación del tensor de tensiones con
cambio de coordenadas
Para obtener la ley de transformación de las componentes del tensor
σij
tensor
0
σmn
correspondiente al sistema (X1 , X2 , X3 ) a las componentes del
0
σmn
referido al sistema (Yi ,
Y2 , Y3 )
se recurre a la denición de
0
σmn
= lTm σln
(2.38)
a su vez reemplazando usando 2.26 en la forma
P
lTm = 3i=1 λim tTi se tiene
"
0
σmn
=
3
X
#
λim tTi
"
σ
3
X
i=1
#
λjn tj =
j=1
3 X
3
X
ln =
P3
j=1
λim λjn tTi σtj
λjn tj
y
(2.39)
j=1 i=1
donde por denición el corchete es
σmn =
σij = tTi σtj
3 X
3
X
luego
λim λjn σim
(2.40)
j=1 i=1
que matricialmente puede escribirse
[σmn ] = ΛT [σij ] Λ
(2.41)
σ 0 = Λ σΛ
(2.42)
T
donde
σ
y
σ0
son las componentes del tensor de tensiones referidos a
los dos sistemas, escritos en forma matricial. Similarmente, se tendrá
la transformación inversa:
σij =
3 X
3
X
σmn λim λjn
(2.43)
m=1 n=1
2.5.3. Direcciones Principales de Tensión
2.5.3.1. Consideraciones Físicas
Se vio anteriormente que por un punto de un sólido pasan innitos
planos y hay por lo tanto innitos vectores tensión. Interesa determinar
los valores extremos de las tensiones, y las direcciones en que ocurren
Análisis General de Tensiones
37
y esos valores se denominarán tensiones principales y direcciones principales de tensión.
Se verá que los valores extremos de la tensión normal están asociados a planos donde la tensión de corte es nula. El criterio de búsqueda
será entonces el inverso, determinar aquellas direcciones
ν
asociadas
a un plano donde no haya tensiones de corte (es decir, donde la componente tangencial
σνs
sea nula) y luego vericar que corresponden a
valores extremos.
σν
La condición analítica para que los vectores
y
ν
sean paralelos
puede escribirse como
σν = σ ν
donde
σ
(2.44)
es un escalar a determinar. Reemplazando
σν
de la expresión
(2.11), se tendrá:
σν = σ ν = σ 1 ν
(2.45)
que pasando todo al primer miembro resulta
[σ − σ1] ν = 0
que puede escribirse en forma matricial como
σ11 − σ
σ21
σ31
ν1
0
σ12
σ22 − σ
σ32
ν2 = 0
σ13
σ23
σ33 − σ
ν3
0
El problema de encontrar los valores de
vector dirección
ν1 , ν2 , ν3
σ
(2.46)
y las componentes del
que satisfacen la expresión 2.46 se conoce
como un problema de vectores y valores propios. Dado que proponemos
que existe una dirección en la que se cumple la condición propuesta,
entonces los valores de
ν1 , ν2 , ν3
no pueden ser todos nulos. Pero como
se trata de un versor, sus componentes deben satisfacer la condición
de módulo unitario:
ν12 + ν22 + ν32 = 1
(2.47)
pues son los cosenos directores de alguna dirección.
Pero para que se satisfaga la condición 2.46 sin ser
nulo,
ν
el vector
entonces necesariamente el determinante de la matriz principal
deberá ser nulo. Desarrollando el determinante se llega a una ecuación
de tercer grado en
σ
de la forma
σ 3 − I1 σ 2 + I2 σ − I3 = 0
(2.48)
Introducción a la Teoría de Elasticidad
38
Esta expresión se conoce como la ecuación característica del tensor
y los escalares
I1 , I2 , I3
σij
están dados por
I1 = tr(σ) = σ11 + σ22 + σ33
2
2
2
(2.49)
− σ23
− σ13
I2 = σ11 σ22 + σ11 σ33 + σ22 σ33 − σ12
2
2
2
I3 = det σ = σ11 σ22 σ33 + 2σ12 σ23 σ31 − σ11 σ23 − σ22 σ31 − σ33 σ12
Las tensiones y direcciones principales son características del estado
tensional en un punto, por lo tanto no dependen del sistema coordenado
utilizado para encontrarlas. Por esa razón, los coecientes
I1 , I2 , I3
de
la ecuación 2.48 deben ser independientes del sistema de referencia
utilizado.
Los valores
I1 , I2 , I3
se denominan invariantes de tensión. Genera-
lizando, todo tensor de segundo orden tiene tres invariantes.
La ecuación 2.48 tiene tres raíces reales, que llamaremos
σIII
σI , σII ,
y cuyo valor no depende del sistema de referencia empleado para
obtenerlas. La forma más compacta de expresar el estado de tensiones en un punto es usando las tensiones principales, porque sólo es
necesario especicar tres valores
σI 0
0
0
σij = 0 σII
0 0 σIII
Se puede demostrar que las tensiones
σI , σII , σIII
(2.50)
son valores ex-
tremos comparados con las tensiones normales en direcciones vecinas.
Obtenidos los valores
σ
de la ecuación 2.48 se podrán evaluar las
direcciones en las que se da cada tensión principal. Para ello se cuenta
con la ecuación 2.46. Por ejemplo, sustituyendo el primer valor principal
σI
se tiene
I
σ11 − σI
σ21
σ31
ν1
0
I
σ12
σ22 − σI
σ32
ν2 = 0
σ13
σ23
σ33 − σI
ν3I
0
Nótese que, como los valores de
σ
(2.51)
se obtuvieron con la condición
que el determinante de la matriz principal sea nulo (esto es, que la
matriz principal sea singular), la ecuación 2.46 resulta un sistema singular, que no tiene inversa. Una de las tres ecuaciones será linealmente
dependiente de las otras dos y para encontrar la dirección asociada a
Análisis General de Tensiones
σI
39
hay que jar una de las componentes de
ν I , por ejemplo ν1I = 1. y se
calculan las otras componentes resolviendo el sistema de dos ecuaciones
simultáneas lineales resultante de eliminar la primera la y cambiar de
miembro la primera columna: :
σ22 − σI
σ32
σ23
σ33 − σI
ν2I
ν3I
Adicionalmente, se sabe que el versor
=
ν
−σ12
−σ13
(2.52)
debe satisfacer la condi-
ción de módulo unitario 2.47, que permite escalar los componentes de
ν . Las componentes de ν
deben estar referidas a un sistema coordena-
do, de modo que si se cambia el sistema de referencia, cambiarán las
componentes de
σI 6= σII 6= σIII
ν.
Siempre que los valores principales sean distintos,
, se tendrá que las direcciones
ν I , ν II
y
ν III
resultarán
ortogonales entre si, ya que son los vectores propios de un matriz real
y simétrica
σij .
2.5.3.2. Una Forma Explícita de las Tensiones Principales
Las tensiones principales
σI , σII
y
σIII
pueden ser obtenidos por
las expresiones explícitas siguientes [9]
2
2
σI = √ σ̄ sin ψ + π +
3
3
2
I1
σII = √ σ̄ sin ψ +
3
3
2
4
σIII = √ σ̄ sin ψ + π +
3
3
donde se obtiene
( σI ≥ σII ≥ σIII ).
I1
3
(2.53)
I1
3
Los parámetros de la ecuación
anterior toman los siguientes valores:
!
√
¯
1
3 σ̄
π
π
ψ = arcsen
para −
≤ψ≤
3
3
2 σ̄
6
6
1 σ̄ = √ (σ11 − σ22 )2 + (σ11 − σ33 )2 + (σ22 − σ33 )2
6
1
2
2
2
2
+6 σ12
+ σ13
+ σ23
2
¯ = I1 I2 − I13 − 3I3
σ̄
9
(2.54)
Introducción a la Teoría de Elasticidad
40
σ̄
Se puede demostrar que
puede escribirse de una manera más
compacta como
r
σ̄ =
Debe notarse que
¯
σ̄ , σ̄
y
ψ
1 2
(I − 3I2 )
3 1
(2.55)
σij y sus
I1 , I2 , I3 .
son también invariantes del tensor
valores pueden ser expresados en función de los invariantes
2.5.4. Círculos de Mohr
Interesa saber si cualquier par de componentes
σvv
y
σνs
arbitrariamente constituyen realmente un vector de tensiones
elegidas
σ ν . Para
estudiar cuales son las condiciones que deben cumplir las componentes
normal y tangencial de un vector usaremos la forma principal del tensor
de tensiones.
Supongamos por simplicidad que las direcciones coordenadas
X2 , X3
coinciden con las direcciones principales, de modo que
la forma
σij
X1 ,
tiene
σI 0
0
0
[σij ] = 0 σII
0 0 σIII
(2.56)
Usaremos tres ecuaciones que involucran las componentes principales
del tensor, las componentes del vector tensión y las componentes del
versor dirección. De acuerdo con la 2.14, podemos calcular la componente normal del vector tensión en función de tensiones principales
σvv = σij νi νj = σI ν12 + σII ν22 + σIII ν32
(2.57)
Además, de la 2.17 se tiene que el módulo del vector tensión está dado
por
2 2
2
2
2
ν32
= σI2 ν12 + σII
ν2 + σIII
|σν |2 = σνν
+ σνs
Por último, la condición de
(2.58)
módulo unitario resulta:
ν12 + ν22 + ν32 = 1
(2.59)
2
Las ecuaciones 2.572.59 forman un sistema con tres incógnitas: ν1 ,
ν22 , ν32 :
2
1 1
1
ν1
1
σI σII σIII ν22 =
σνν
(2.60)
2
2
2
2
2
2
σI σII σIII
ν3
σνν + σνs
Análisis General de Tensiones
41
Resolviendo el sistema 2.60 se determinan
(σνν − σII ) (σνν − σIII ) + (σνs )2
(σI − σII ) (σI − σIII )
(σνν − σIII ) (σνν − σI ) + (σνs )2
2
ν2 =
(σII − σIII ) (σII − σI )
(σνν − σI ) (σνν − σII ) + (σνs )2
ν32 =
(σIII − σI ) (σIII − σII )
ν12 =
Nótese que
νi2
(2.61)
es siempre positivo. Si se ordenan las tensiones prin-
cipales de modo que
σI > σII > σIII ,
los denominadores de la primera
y la tercera de las ecuaciones 2.61 serán siempre positivos, en tanto
que el denominador de la segunda será siempre negativo, de modo que
los numeradores tendrán los signos:
(σνν − σII ) (σνν − σIII ) + (σνs )2 ≥ 0
(σνν − σIII ) (σνν − σI ) + (σνs )2 ≤ 0
(2.62)
(σνν − σI ) (σνν − σII ) + (σνs )2 ≥ 0
Para que un par de componentes
σνν , σνs
representen un estado
de tensión posible en un punto de la estructura, deberán ser tales que
satisfagan las 2.62. La segunda desigualdad es satisfecha por los puntos
internos (o en el contorno) de un círculo de radio R = (σI − σIII )/2
σI +σIII
, 0 , en tanto que la primera
centrado en el punto (σvv , σνs ) =
2
y la tercera de las desigualdades son satisfechas por puntos que se
encuentran sobre o fuera de círculos similares. La Figura 2.8 muestra
ese conjunto de posibles valores
σνν
y
σνs
como una zona sombreada
y limitada por tres círculos denidos por las 2.62. El punto
A
en la
gura está asociado a un plano en el que la componente cortante de
la tensión es máxima y su valor puede obtenerse de la semidiferencia
entre las tensiones principales mayor y menor.
La representación de tensiones por medio de estos círculos fue presentada por el ingeniero alemán Otto Mohr en 1882.
2.5.5. Componentes Esféricas y Desviadoras del
Tensor de Tensiones
Todo tensor
σij
puede descomponerse como la suma de dos tensores,
uno hidrostático y otro desviador. Esa descomposición toma la forma
Introducción a la Teoría de Elasticidad
42
σν s
A
σ ΙΙΙ
σ ΙΙ
σΙ σ
νν
Figura 2.8: Círculos de Mohr
siguiente:
σM 0
0
σ11 − σM
σ12
σ13
σ21
σ22 − σM
σ23
σij = 0 σM 0 +
0
0 σM
σ31
σ32
σ33 − σM
(2.63)
donde
σM =
I1
σ11 + σ22 + σ33
=
3
3
(2.64)
El primer término, es conocido como tensor esférico y el segundo
como tensor desviador. El tensor esférico está asociado a un estado
hidrostático de tensión de intensidad
σM
en todas las direcciones; el
carácter de hidrostático indica la ausencia de componentes cortantes en
cualquier dirección. Esta primera componente es propia de los uidos
en reposo.
El tensor desviador, cuyas componentes serán designadas por
sij ,
está asociado con esfuerzos o tensiones de corte. La descomposición
puede escribirse como
σij = δij σM + sij
σ = 1σM + s
(2.65)
(2.66)
Análisis General de Tensiones
43
Es fácil demostrar que la componente desviadora tiene traza nula,
o sea
tr(s)
= s11 + s22 + s33 = 0
(2.67)
de donde una de las componentes de la diagonal principal es función
de las otras dos:
s22 = −s33 − s11
Es posible descomponer al tensor
sij
(2.68)
en la suma de cinco estados
de corte puro, tres de ellos según los planos cartesianos y dos en planos
a 45 grados con respecto a los cartesianos. En efecto:
0 s12 0
0
0
[sij ] = s21 0 0 +
0
0 0
s13
s11
0
0
0
0
−s
0
+
+ 0
11
0
0
0
0
0 s13
0 0
0
0 0 + 0 0 s23
0 0
0 s32 0
0
0
−s33 0
(2.69)
0
s33
Los tres primeros tensores son evidentemente estados de corte puro,
mientras que los dos últimos son estados de corte puro en un elemento
diferencial a 45 grados del coordenado, como se ilustra en la Figura
2.9.
Figura 2.9: Componentes del tensor desviador
Esta descomposición aditiva del tensor
σij
permite un mejor trata-
miento de dos aspectos importantes:
(a) Permite establecer una relación entre las tensiones
σij
y las de-
formaciones correspondientes a través de las ecuaciones constitutivas.
Introducción a la Teoría de Elasticidad
44
(b) Permite una descripción conveniente de los fenómenos de plasticidad y rotura de los materiales.
2.5.5.1. Invariantes del Tensor Desviador
Dada la linealidad de las expresiones de transformación de las componentes de tensión
σij
ya vista, los componentes desviadores también
se transformaran según dicha ley y
sij
constituye un tensor. Por lo tan-
to, será posible denir los invariantes del tensor
J1 , J2
y
J3 .
sij
y se denominarán
Como ya se vio, el primer invariante del tensor desviador
es nulo en tanto que los otros resultan
J1 = tr (s) = s11 + s22 + s33 = 0
J2 = s11 s22 + s11 s33 + s22 s33 − s212 − s213 − s223
I1 I2
2
(I1 )3 −
J3 = det [sij ] = det [σij ] +
27
3
Que se pueden escribir en función de los invariantes
I12
3
2
I1 I2
J3 = I3 +
(I1 )3 −
27
3
J2 = I2 −
o también en función de los invariantes
J2 = −σ̄ 2
¯
σ̄
J3 = −
3
σ̄
y
¯
σ̄
I1 I2 I3
(2.70)
:
(2.71)
se llega a
(2.72)
2.6. Estados Tensionales en el Espacio de
las Tensiones Principales
Cuando se estudiaron las propiedades del tensor de tensiones (Sección 2.5) se vio que siempre es posible rotar el sistema coordenado de
modo de obtener el estado principal. En lugar de trabajar con las seis
componentes distintas del tensor de tensiones, que no permiten realizar
Análisis General de Tensiones
45
representaciones grácas, muchas veces es más conveniente trabajar en
el espacio de tensiones principales.
Veremos a continuación representaciones de tensiones en un espacio
cuyos ejes con las tensiones principales
σI σII σIII .
Este se denomina
espacio de Westergaard. En este espacio, un punto representa las componentes de un tensor. Hay una dirección que está formada por los
puntos que son equidistantes de los tres ejes y cumple con la condición
σI = σII = σIII
(2.73)
y se dene como eje hidrostático. El plano normal al eje hidrostático
y contiene al origen del sistema de coordenadas
σI = σII = σIII = 0
se denomina plano desviador (ver Figura 2.10).
Se denen como planos octaédricos aquellos cuya normal equidista
de los direcciones principales de tensión en el punto. Supongamos que
el sistema de referencia cartesiana (X1 ,
ciones principales (I ,
II , III ),
X2 , X3 ) coincide con las direc-
entonces los cosenos directores de las
direcciones octaédricas son
ν12 = ν22 = ν32 =
1
3
(2.74)
Un punto cualquiera en el espacio de tensiones principales representa un tensor de tensiones. Si se lo desea, es posible visualizar ese
estado mediante un vector que une el punto con el origen y representa
el tensor. Ese vector puede ser descompuesto de varias formas, pero
resulta muy útil encontrar sus componentes sobre el eje hidrostático y
sobre el plano desviador. Esas componentes son ampliamente usadas
para estudiar plasticidad.
2.6.1. Componentes Esféricas y Desviadoras
Consideremos la descomposición del tensor de tensiones en componentes esféricas y desviadoras, pero usando las tensiones principales.
Se tiene así
σI 0
σij = 0 σII
0 0
σM 0
0
σM
=
0
0
0
=
0
(2.75)
σIII
0
σI − σM
0
0
0 +
0
σII − σM
0
σM
0
0
σIII − σM
Introducción a la Teoría de Elasticidad
46
Figura 2.10: Espacio de tensiones principales. Eje hidrostático y plano
desviador
donde
σM =
1
(σI + σII + σIII ) =
3
tal que su traza (primer invariante
I1
. La componente desviadora es
3
J1 )
es cero, luego
(σII − σM ) = − (σI − σM ) − (σIII − σM )
Es posible entonces descomponer
σI − σM
0
[Sij ] =
0
Sij
en dos tensores
0
0
0
0
0
− (σI − σM ) 0 + 0 − (σIII − σM )
0
0
0
0
0
σIII − σM
(2.76)
donde cada tensor representa un estado de corte puro. Nótese que
cuando
σij
sij
cuando σij
se escribe para ejes cartesianos cualquiera,
pone en cinco componentes de corte puro, pero
se descomse reere a
planos principales bastan dos componentes de corte puro para denir
Sij .
Análisis General de Tensiones
47
Como conclusión se tiene que cualquier tensor de tensiones
σij
pue-
de escribirse usando sus componentes principales y cuando se lo dibuja en el espacio principal da un vector. Ese vector se puede descomponer en una componente sobre el eje hidrostático, cuyo valor es
√
√
3σM = I1 / 3
y en otra componente ubicada en el plano desvia-
dor, cuyo módulo al cuadrado vale
−2 J2 .
Las dos componentes de
Sij
también están en el plano desviador, como se muestra en la gura.
Figura 2.11: Descomposición en componentes esféricas y desviadoras
en el espacio de tensiones principales
2.6.2. Tensión de Corte en los Planos Octaédricos
Como se mencionó anteriormente, un plano octaédrico es un plano
que forma ángulos iguales con respecto a las direcciones principales de
tensión en un punto determinado de una estructura (hay 8 planos que
cumplen esa condición). De modo que el tensor de tensiones referido a
Introducción a la Teoría de Elasticidad
48
ejes
X1 , X2 , X3
resulta en la forma
σI 0
0
0
[σij ] = 0 σII
0 0 σIII
Un versor
ν
(2.77)
normal al plano octaédrico (equidistante de los ejes) puede
escribirse como
1
(2.78)
ν = √ (±t1 ± t2 ± t3 )
3
Con referencia a la Figura 2.5, denominaremos σ0 al vector de tensiones
asociado al plano octaédrico cuya normal es ν . Este vector tensión σ 0
tiene dos componentes, una normal que designaremos por el escalar σ0
y una tangencial τ 0 .
La componente normal se calcula mediante la expresión general de
σνν
σ0 = σνν
= σI ν12 + σII ν22 + σIII ν32
(2.79)
Pero la normal al plano octaédrico tiene sus componentes iguales, con
lo que
σ0
se reduce a
σ0 =
I1
σI + σII + σIII
=
3
3
(2.80)
De modo que la tensión normal en los planos octaédricos es igual a
la tensión media
σM =
1
(σI + σII + σIII )
3
(2.81)
Buscaremos a continuación la componente cortante de este vector.
El vector tensión en el plano octaédrico
escribir como
σ0
es un vector y se puede
σν
σ 0 = +σI ν1 t1 + σII ν2 t2 + σIII ν3 t3
1
= √ (±σI t1 ± σII t2 ± σIII t3 )
3
(2.82)
El módulo de ese vector se calcula como el producto escalar del vector
por si mismo
σ 0 · σ 0 = |σ0 |2 =
1 2
2
2
σI + σII
+ σIII
3
(2.83)
Análisis General de Tensiones
49
Por otra parte, el módulo del vector tensión
σ0
resulta
|σ 0 |2 = σ02 + τ02
(2.84)
τ02 = |σ 0 |2 − σ02
(2.85)
Despejando se obtiene
Sustituyendo en la ecuación de
τ02
τ02 ,
resulta
1
1 2
2
2
=
σI + σII
+ σIII
− (σI + σII + σIII )2
3
9
(2.86)
Desarrollando, la ecuación anterior puede escribirse como
1 2
2
2
2σI + 2σII
+ 2σIII
− 2σI σII + 2σII σIII + 2σI σIII
9"
#
2 (σI − σII )2 (σI − σIII )2 (σII − σIII )2
=
+
+
(2.87)
9
2
2
2
τ02 =
Introduciendo la notación
σe2 =
1
(σI − σII )2 + (σI − σIII )2 + (σII − σIII )2 = 3σ̄ 2
2
Reemplazando
σe
en la ecuación de
τ02
se llega a
2
τ02 = σe2
9
Como se verá más adelante,
σe
(2.88)
(2.89)
representa una tensión efectiva o
tensión de comparación, también llamada tensión de von Mises, que es
de gran utilidad para evaluar el efecto de un estado complejo de tensiones en un material. Este valor
σe
interesa principalmente en metales
dúctiles, pero también es de utilidad en la evaluación de las solicitaciones en otros materiales, como hormigones.
Se demuestra fácilmente que una forma alternativa de escribir la
tensión efectiva es
σe2 = −3J2
Otras formas de escribir
τ02
2
τ02 = − J2
3
(2.90)
en función de invariantes son
y
2
τ02 = σ̄ 2
3
(2.91)
50
Introducción a la Teoría de Elasticidad
2.7. Ecuaciones Diferenciales de Equilibrio
En las secciones anteriores solamente se denieron las variables que
caracterizan el estado tensional en un punto de un sólido y ahora se
mostrará qué relaciones tienen esas variables con las fuerzas externas. Estas relaciones tienen la forma de ecuaciones diferenciales, que
permiten equilibrar las fuerzas másicas e inerciales actuantes con las
tensiones que se desarrollan en el cuerpo sólido.
Para plantear equilibrio se estudiará la suma de fuerzas en un elemento diferencial o cubo elemental perteneciente a la estructura indeformada (Figura 2.12), en el cual se pondrán en evidencia las acciones
de las fuerzas másicas y de las tensiones. En realidad la denición de
las tensiones y las ecuaciones de equilibrio deberían plantearse en la
conguración deformada del sólido; sin embargo, aquí supondremos
que los desplazamientos son pequeños y que no es necesario distinguir
entre ambas conguraciones a este n.
Figura 2.12: Equilibrio de un cubo elemental
2.7.1. Equilibrio de Fuerzas
σ i asociados a cada cara
másicas ρb, aplicando la segunda
Si se suman los vectores de tensión
cubo elemental más las fuerzas
del
ley
de Newton y simplicando factores comunes, se llega a la ecuación
Análisis General de Tensiones
diferencial:
donde
y
ρ
b
51
3
X
∂σ i
+ ρb = ρa
∂X
i
i=1
(2.92)
es la fuerza másica por unidad de masa,
a
es la aceleración
es la densidad del material. En general se considerarán problemas
de equilibrio estático por lo que se supondrá
F = ρb
a=0
y reemplazaremos
(fuerza másica por unidad de volumen).
El equilibrio en componentes escalares se puede encontrar en función de las componentes cartesianas (cada dirección
tj ).
Para ello se
proyecta la ecuación 2.92 en cada una de dichas direcciones
3 X
∂σi
+ tj · F = 0
tj ·
∂Xi
i=1
σ i de la 2.4, y notando que tj · tk = δjk
"
!#
3
3
X
X
∂
tj ·
σik tk
+ tj · F = 0
∂Xi k=1
i=1
tj :
(2.93)
Sustituyendo
3 X
3
X
∂ (σik )
i=1 k=1
∂Xi
δjk + Fj = 0
(2.94)
(2.95)
Finalmente resultan las ecuaciones escalares
3
X
∂σij
i=1
∂Xi
+ Fj = 0
(2.96)
La ecuación 2.96 representa tres ecuaciones escalares de equilibrio
de fuerzas,
∂σ11 ∂σ21 ∂σ31
+
+
+ F1 = 0
∂X1
∂X2
∂X3
∂σ12 ∂σ22 ∂σ32
+
+
+ F2 = 0
∂X1
∂X2
∂X3
∂σ13 ∂σ23 ∂σ33
+
+
+ F3 = 0
∂X1
∂X2
∂X3
(2.97)
Se trata de un sistema acoplado de ecuaciones diferenciales. Las
tres ecuaciones de equilibrio contienen seis incógnitas, de modo que
el problema es estáticamente indeterminado, aún sin considerar las
condiciones de vínculo.
Introducción a la Teoría de Elasticidad
52
2.7.2. Equilibrio de Momentos
Se escribe a continuación la condición vectorial de equilibrio de momentos en la Figura 2.12, con respecto
cubo elemental.
al centro del Las resultantes de las tensiones
σi
y
σi +
∂σ i
dXi
∂Xi
se consideran
aplicadas en los centros de las caras, en tanto que la fuerza másica se
considera aplicada en el centro del elemento y por lo tanto su contribución es nula. Resulta así:
3 X
1
1
∂σ i
− ti dXi × (−σ i ) + ti dXi × σ i +
dXi
dAi = 0
2
2
∂Xi
i=1
(2.98)
donde
dAi
es el área de la cara normal a
ti
dA1 = dX2 dX3
dA2 = dX3 dX1
dA3 = dX1 dX2
Dejando de lado términos de orden cuarto
(2.99)
(dAi dXi dXi ), simplicando
los diferenciales
dXi dAi = dX1 dX2 dX3
(2.100)
queda
3
X
ti × σ i = 0
(2.101)
i=1
Sustituimos
σi
de la ecuación 2.4,
3
X
i=1
ti ×
3
X
!
σij tj
=0
(2.102)
j=1
Recordando que el producto vectorial de versores de una terna es:
ti ×tj =
0
si
i=j
t1 × t2 = t3
ej. t3 × t2 = −t1
el tercer vector si están ordenados, por ej.
menos el tercer vector si no lo están, por
(2.103)
se tiene:
t3 (σ12 − σ21 ) + t2 (σ31 − σ13 ) + t1 (σ23 − σ32 ) = 0
(2.104)
Análisis General de Tensiones
Pero como
ti 6= 0
53
e independientes, entonces necesariamente debe
ocurrir que
σ21 − σ12 = 0
σ13 − σ31 = 0
σ23 − σ32 = 0
(2.105)
o, lo que es lo mismo,
σij = σji
(2.106)
Esta es la demostración de la simetría del tensor, o condición de
reciprocidad del tensor de tensiones, mencionada en la ecuación 2.37.
Se concluye que las tensiones tangenciales recíprocas en planos ortogonales son iguales entre sí. Recién aquí hemos justicado que usaremos
seis componentes de tensión
σij
en lugar de las nueve que contiene el
tensor.
2.7.3. Condiciones de Borde de Tensión
Supondremos que en el contorno del cuerpo estudiado existen fuerzas de supercie
f1
f = f2
f3
(2.107)
Estas fuerzas están expresadas por unidad de supercie, es decir que
tienen dimensiones similares a las de una tensión y actúan sobre el
plano cuya normal es
ν
(en este caso también normal al cuerpo). La
condición de equilibrio exige que
f = σν
Reemplazando
σν
(2.108)
en función del tensor de tensiones de la 2.11,
f = σν
o bien, en componentes,
fj =
3
X
σij νi
(2.109)
i=1
Las 2.109 son tres ecuaciones escalares que deben satisfacer las
componentes del tensor de tensiones en el borde del cuerpo donde se
Introducción a la Teoría de Elasticidad
54
conoce el valor de la fuerza
f
(nula o no)
f1 = σ11 ν1 + σ21 ν2 + σ31 ν3
f2 = σ12 ν1 + σ22 ν2 + σ32 ν3
f3 = σ13 ν1 + σ23 ν2 + σ33 ν3
Notar que
f
(2.110)
no es necesariamente normal a la supercie, sino que
también puede incluir componentes tangenciales.
Figura 2.13: Condición de equilibrio en el borde
En resumen, las componentes
σij
del tensor de tensiones deben ser
tales que satisfagan las ecuaciones de equilibrio 2.96 en el interior del
cuerpo y las 2.109 en el contorno cargado o libre del cuerpo.
2.7.4. Forma Integral de las Condiciones de Equilibrio∗
Si se cumplen las ecuaciones diferenciales de equilibrio en el interior
del cuerpo (V ) y las condiciones de contorno de fuerzas en la supercie
(S )
3
X
∂σ i
+F=0
∂X
i
i=1
3
X
i=1
σ i νi = f
en
en
S
V
(2.111)
(2.112)
Análisis General de Tensiones
55
entonces también se cumplen las ecuaciones globales de equilibrio de
fuerzas y de momentos, es decir
ˆ
ˆ
F dV +
V
ˆ
(d × F) dV +
d
(2.113)
(d × f ) dS = 0
(2.114)
ˆ
V
donde
f dS = 0
S
S
es el vector posición respecto de un punto arbitrario, para lo
cual se puede elegir al origen del sistema de coordenadas (X1 ,
X2 , X3 )
como punto respecto al cual tomar momentos:
d = Xi ti
(2.115)
Demostración: Integrando la ecuación de equilibrio de fuerzas resulta:
ˆ
!
3
X
∂σ i
+ F dV = 0
∂X
i
i=1
V
(2.116)
e integrando el primer término con la expresión de Gauss
ˆ X
ˆ X
ˆ
3
3
∂σ i
dV =
σ i νi dS =
f dS
V i=1 ∂Xi
S i=1
S
Luego:
(2.117)
ˆ
ˆ
f dS = 0
F dV +
(2.118)
S
V
que son las ecuaciones de equilibrio de fuerzas globales del cuerpo.
Para encontrar la ecuación de momentos global se tomará momentos de cada término de la ecuación de equilibrio de fuerzas también
con respecto al origen de coordenadas:
ˆ
V
3
X
∂σ i
d×
∂Xi
i=1
ˆ
!
(d × F) dV = 0
dV +
(2.119)
V
Por otro lado:
∂
∂d
∂σ i
(d × σ i ) =
× σi + d ×
∂Xi
∂Xi
∂Xi
(2.120)
Introducción a la Teoría de Elasticidad
56
Además
∂d
=
∂Xi
∂
P
3
j=1 Xj tj
∂Xi
=
3
X
∂Xj
∂Xi
j=1
tj =
3
X
δij tj = ti
(2.121)
j=1
Luego
3
3
3
X
X
X
∂
∂σ i
(d × σ i ) =
ti × σ i +
d×
∂Xi
∂Xi
i=1
i=1
i=1
(2.122)
Como ya se ha demostrado, el primer término del segundo miembro
se anula debido al equilibrio local de momentos que se satisface en
forma idéntica si
σij = σji . Aplicando nuevamente el teorema de Gauss
ˆ X
3 V i=1
∂σ i
d×
∂Xi
ˆ X
3
∂
(d × σ i ) dV
(2.123)
dV =
V i=1 ∂Xi
ˆ X
ˆ X
3
3
=
(d × σ i ) νi dS =
(d × σ i νi ) dS
S i=1
S i=1
Finalmente, usando las condiciones de borde resulta
ˆ
ˆ
(d × F) dV = 0
(d × f ) dS +
S
(2.124)
V
2.8. Comentarios Sobre el Origen de los
Conceptos de Tensión∗
Agustín Cauchy presentó oralmente su teoría sobre esfuerzos internos en sólidos el 30 de septiembre de 1822 y en forma escrita en
1823 en Bulletin de la Societe Philomatique. También expandió esos
conceptos en su texto Excercises de Mathematiques, de 1829, en donde
aparecen las ecuaciones diferenciales de equilibrio. El concepto de tensión fue posteriormente generalizado a situaciones no contempladas por
Cauchy, pero el detalle y los conceptos que enseñamos en la actualidad
a los ingenieros siguen la letra de Cauchy. Los escritos de Cauchy son
muy claros y rigurosos y la lectura de su contribución original puede
ser hecha en la actualidad con mucho benecio para el lector.
Análisis General de Tensiones
57
El principio de tensión no resulta evidente ni puede medirse directamente la tensión sobre un plano, de modo que no se trata de un
término observacional sino de un término teórico. Nadie había generado el concepto de tensión en sólidos con anterioridad y la enorme
contribución de Cauchy consistió en formularlo, a partir del cual fue
posible construir el resto de la teoría de elasticidad. La génesis del
1
concepto de tensión ha sido reconstruida por Truesdell , quien mostró
que los elementos conceptuales que eran necesarios para establecer una
teoría de esfuerzos en sólidos ya se encontraban en trabajos anteriores a Cauchy. Sin embargo, se trataba de contribuciones sobre casos
particulares y que nunca fueron puestos juntos como lo hizo Cauchy.
La idea de aislar el sistema continuo y cortarlo imaginariamente
en dos partes para representar la acción de una de ellas sobre
la otra mediante campos denidos en la frontera entre ambos se
debe a Euler (de un trabajo de 1750).
Cauchy señala que la tensión sobre una supercie es de la misma naturaleza que la presión hidrostática que hace un uido en
reposo sobre la supercie externa de un cuerpo. Pero la tensión
no permanece perpendicular a la supercie sobre la que actúa, ni
es igual en todas direcciones para un punto del sólido. De modo
que el origen del vector de tensiones parece ser la hidrostática.
Esta idea de presión de Euler fue a su vez tomada y renada de
la contribución de John Bernoulli (de un trabajo de 1743), quien
usaba la presión como una fuerza interior.
Para concebir un comportamiento de tensión sobre una supercie diferente de la presión, es necesario considerar la inuencia de
esfuerzo de corte. Eso había sido estudiado por Coulomb en 1773
para una viga, quien también llegó a plantear las ecuaciones de
equilibrio, pero sin escribirlas en forma de ecuaciones diferenciales.
1 Truesdell,
C. A. (1968), Essays in the History of Mechanics, Springer Verlag,
Berlin. Traducido al español como Ensayos de Historia de la Mecánica, Editorial
Tecnos, Madrid, 1975.
Introducción a la Teoría de Elasticidad
58
2.9. Ejercicios
Ejercicio 2.1.
En un punto en el interior de una estructura se ha
computado el tensor de tensiones
σij
y resulta
1 3 4
[σij ] = 3 2 5 M P a
4 5 6
(a) Determine el valor de la tensión
σv
asociada a un plano que
pasa por el punto y cuya normal es:
ν = 0,768 t1 − 0,548 t2 − 0,329 t3
(b) Evalúe las componentes
el vector tensión
σµ
σνν
y
σνs
del vector tensión. (c) Evalúe
asociado al plano cuya normal es
µ = 0,329 t1 − 0,768 t2 − 0,548 t3
(d) Compruebe que
σν · µ = σµ · ν
Ejercicio 2.2. Para el tensor de tensiones del ejercicio 2.1: (a) Encuentre las direcciones y valores principales de tensión. (b) Descomponga el
tensor en sus componentes esférica y desviadora. (c) Obtenga el tensor
σij0 referido a un sistema nuevo, empleando la matriz de rotación:
0,669
0,743 0
Λ = −0,743 0,669 0
0
0
1
Ejercicio 2.3. Las componentes de tensión en todo el volumen de una
estructura están dadas por
σ11 = A (X1 + 3X32 + 5X2 )
σ22 = A (X1 + 4X2 + X3 )
σ33 = A (2X1 + X3 )
donde
A
σ12 = A (X32 + X13 )
σ23 = A (X12 )
σ31 = A (X1 + X22 )
es una constante. Determine qué distribución de fuerzas má-
sicas debe existir para que el cuerpo esté en equilibrio.
Ejercicio 2.4. Escriba las componentes del vector de tensiones en
un plano genérico si se tiene el tensor de tensiones en las direcciones
principales.
Análisis General de Tensiones
59
Ejercicio 2.5. Un tensor de tensiones está dado por
1 a b
σij = a 1 c
b c 6
a, b, c si se requiere que el vector de tensiones
µ sea cero, donde
√
√
√
µ = 1/ 3 t1 + 1/ 3 t2 + 1/ 3 t3
Qué valores deben tener
asociado a la dirección normal
Solución: a = b = c = −1/2.
Ejercicio 2.6. Para el tensor
10 −6 0
[σij ] = −6 10 0 M P a
0
0
1
(a) Obtenga las componentes esféricas y desviadoras; (b) Compute las
tensiones principales de la componente desviadora.
Ejercicio 2.7. Calcule las componentes principales de tensión y sus
direcciones asociadas para un tensor que tiene todas sus componentes
σ
√
√ij = 1.
1/ 3 t2 + 1/ 3 t3 .
igual a uno,
Ejercicio 2.8.
√
Solución: σI = 3, σII = σIII = 0. ν=1/ 3 t1 +
Sea
Φpq
un tensor simétrico de segundo orden, tal
que las componentes del tensor de tensiones
partir de
Φpq
σij
sean computables a
en la forma:
σij = δij
−
∂ 2 Φqq
∂ 2 Φqp
−
∂x2p
∂xp ∂xq
+
∂ 2 Φpi
∂ 2 Φjp
+
∂xp ∂xj ∂xp ∂xi
∂ 2 Φpp
∂ 2 Φji
−
∂xi ∂xj
∂x2p
Demuestre que, con esa denición de
σij ,
las ecuaciones de equilibrio
en el volumen se satisfacen automáticamente en ausencia de fuerzas
másicas. Ese tensor
Φpq
es el equivalente a la función de tensión de
Airy en elasticidad bidimensional.
60
Introducción a la Teoría de Elasticidad
Capítulo 3
Análisis General de
Deformaciones
En este capítulo se estudian las deformaciones de un cuerpo en el
entorno de un punto. Se supone que los desplazamientos y giros del sólido son pequeños y que las deformaciones son pequeñas. En la primera
parte se evalúan deformaciones especícas longitudinales, angulares y
volumétricas, y al relacionarlas con el campo de desplazamientos surge
la necesidad de denir un tensor de deformaciones. En la segunda parte
se investiga ese tensor; se demuestra que es un tensor de segundo orden;
se encuentran sus valores y direcciones principales; y sus componentes
esférica y desviadora. En la tercera parte se estudia la rotación de una
bra.
3.1. Posición y desplazamiento de un punto. Medidas de deformación
Hipótesis:
Partimos de un cuerpo en un estado inicial libre de deformaciones
y del cual conocemos su geometría. Este cuerpo
teriales designaremos como
P
cuyos puntos ma-
que referidos a un sistema coordenado
cartesiano estarán denidos por el vector
X
XT = (X1 , X2 , X3 )
Denominaremos al cuerpo
B
B
(3.1)
y a las posición de los puntos en esta
conguración indeformada como la conguración de referencia. Debido
61
Introducción a la Teoría de Elasticidad
62
a alguna acción externa el cuerpo
B cambiará de forma y ocupará una
b. Los puntos materiales P
forma distinta que denominaremos con
pasarán a ocupar posiciones diferentes que denotaremos por el vector
x
xT = (x1 , x2 , x3 )
(3.2)
Resulta inmediato introducir los desplazamientos
u
como la dife-
rencia entre la posición nal y la inicial por lo cual es posible escribir
x(X1 , X2 , X3 ) = X + u (X)
sencillamente esto expresa que la nueva posición
P
está dada por la posición original
X
más
(3.3)
x de un punto material
los desplazamientos u
que sufre en el proceso de deformación. El campo de desplazamientos
u
debe ser continuo para asegurar que el cuerpo deformado
b
sea
continuo es decir que no aparezcan brechas o solapamientos.
Objetivo
Conocido entonces el campo de desplazamientos, es decir conocidos
la posición original y deformada de cada punto material
man el cuerpo
B
P
que confor-
interesa poder medir las deformaciones que ocurren
en el entorno de un punto cualquiera. Básicamente las deformaciones
que nos interesa conocer son:
Cambio de volumen
Cambio de la longitud de una bra, originalmente en una dirección cualquiera
ν
Cambio de ángulo entre dos bras, originalmente en dos direcciones cualesquiera
ν
y
µ
(en particular nos interesarán dos bras
que originalmente sean ortogonales, es decir
µ·ν =0
)
Metodología
Para medir deformaciones en el entorno de un punto mediremos
longitudes, ángulos y volúmenes antes y después del movimiento. La
comparación adecuada entre magnitudes originales y nales permite
evaluar deformaciones.
3.1.1. Medidas en la geometría indeformada
Sea entonces un punto cualquiera
A
en el entorno del cual nos
interesa evaluar las deformaciones que se han producido. Consideremos
Análisis General de Deformaciones
63
ρ
D
ν
B
A
Z
C
Y
X
µ
Figura 3.1: Hexaedro elemental
tres puntos
B, C, y D sucientemente cercanos al punto A, que junto
con él denan un hexaedro de caras ortogonales (ver Figura 3.1). Como
caso particular podría ser un hexaedro elemental de caras paralelas a
los planos cartesianos a partir de incrementos innitesimales de las
coordenadas
dXT = (dX1 , dX2 , dX3 )
(3.4)
Por ahora nos mantendremos en la hipótesis de que las caras del
hexaedro no coinciden con los planos cartesianos
Denominaremos con
ν
a la dirección de la bra orientada del punto
A al punto B. Con µ denominaremos a la dirección de la bra orientada
del punto A al punto C que por lo pedido al hexaedro es ortogonal a
ν.
Llamando al vector orientado de
AaB
∆XAB = XB − XA
(3.5)
y a la longitud de dicho vector
∆SAB =
p
(∆XAB · ∆XAB )
donde se ha introducido la noción habitual de distancia en el espacio
euclidiano. Con lo cual tenemos la primera magnitud, una longitud en
Introducción a la Teoría de Elasticidad
64
este caso, medida sobre la geometría indeformada de una bra orientada en una dirección cualquiera
ν.
Es fácil ver que
∆XAB = ∆SAB ν
Si acercamos el punto
B
ν=
o
∆XAB
∆SAB
a lo largo de la dirección
(3.6)
ν
hasta una
distancia innitesimal
dXAB = dSAB ν
Notar que la dirección
ν=
o
dXAB
dSAB
(3.7)
ν es completamente arbitraria, es decir puede
ser cualquier dirección en el espacio.
Similarmente el punto
µ=
C dene junto con el A la dirección µ
dXAC
dSAC
dXAC = dSAC µ
o
Notar que la única condición pedida a
(3.8)
µ es que sea perpendicular a
ν . Una forma de evaluar el ángulo entre bras es través de la expresión
del producto escalar de dos vectores
dXAB dXAC
α = cos [ν · µ] = cos
·
dSAB dSAC
π
Por la forma en que se han elegido las bras α =
2
Finalmente el punto D dene una tercera dirección ρ
−1
−1
(3.9)
en el espacio
que debe ser ortogonal a las anteriores
ρ=ν ×µ=
dXAD
dSAD
o
dXAD = dSAD ρ
(3.10)
El volumen de un paralelepípedo puede obtenerse mediante el triple
producto vectorial de sus aristas
dV = (dXAB × dXAC ) · dXAD = (ν × µ) · ρ dSAB dSAC dSAD
= dSAB dSAC dSAD
La elección de las direcciones persiguen el siguiente objetivo
Nos interesa medir la deformación longitudinal de una bra orientada en la dirección
ν
Análisis General de Deformaciones
65
Nos interesa medir el cambio de ángulo entre las bras
ν
y
µ que
originalmente son ortogonales
Nos interesa medir el cambio de volumen del hexaedro elemental
denido.
Ya hemos evaluado entonces las magnitudes de interés en la geometría
original.
3.2. El gradiente de deformación.
Las deformaciones son medidas locales, las cuales excluyen movimientos y rotaciones de cuerpo rígido. Para medir deformaciones debemos observar como cambian los desplazamientos localmente, modicando la forma y el tamaño.
Veamos ahora como se transforma el hexaedro elemental cuando se
produce el movimiento. Los puntos materiales
A,B,C y D
se mueven
a sus nuevas posiciones que denominaremos respectivamente
a,b,c
y
d. Analicemos el comportamiento de una bra cualquiera, por ejemplo
la denida por los puntos A y B. El punto A de coordenadas
X1
XA = X 2
X3
(3.11)
xa = XA + uA
(3.12)
va a parar a la posición:
en tanto que el punto
B
(y en forma similar los puntos
C
y
D)
de
coordenadas
XB = XA + dSAB ν = XA + dXAB
X1 + dX1
= X2 + dX2
X3 + dX3
(3.13)
va a la posición
xb = xa + dxab = XA + uA + dXAB + duAB
(3.14)
Introducción a la Teoría de Elasticidad
66
donde el diferencial de desplazamientos entre los puntos
A y B (duAB ),
se expresa en función de la derivada direccional (en la dirección
campo de desplazamiento evaluada en el punto
∂u1 ∂u1
∂X1 ∂X2
∂u
∂u2
2
=
∂X1 ∂X2
∂u3 ∂u3
∂X1 ∂X2
= ∇uA ν dSAB
duAB
du1
= du2
du3 AB
= ∇uA dXAB
A
∂u1
∂X3
∂u2
∂X3
∂u3
∂X3
ν)
del
dX1
dX2
dX3 AB
A
(3.15)
con lo cual
dxab = dXAB + duAB = (1 + ∇u|A ) dXAB = FA dXAB
(3.16)
∂u1 ∂u1 ∂u1
∂X
∂X
∂X
1
2
3
dX1
1
∂u
∂u2 ∂u2
2
dX2
+
1
=
∂X
∂X
∂X
1
2
3
dX3 AB
1
∂u3 ∂u3 ∂u3
∂X1 ∂X2 ∂X3 A
Donde a
FA = (1 + ∇u|A ) lo llamaremos gradiente de deformación
(valuado en el punto
A).
Para interpretar físicamente a
F observemos en que se transforman
las aristas de un hexaedro elemental cuyas caras coincidan con los
planos cartesianos. Supongamos que las aristas de este hexaedro midan
sobre cada eje cartesiano
dX1 , dX2
dX3 . Analicemos, por ejemplo,
1 (t1 dX1 ) , para esto basta dar
y
la que está orientada en la dirección
dX = (dX1 , 0, 0) con lo que resulta
∂x1
∂u1
∂X1
1 + ∂X1
∂x
∂u
2
2
dx1 =
dX
=
dX = F1 dX1
∂X1 1 ∂X1 1
∂x3
∂u3
∂X1
∂X1
valores a
(3.17)
Que es la primera columna del gradiente de deformación multiplicada por la longitud original. Lo mismo podemos decir respecto a las
otras direcciones coordenadas.
Análisis General de Deformaciones
67
El hexaedro deformado se ha convertido ahora en un paralelepípedo
cuyo volumen puede calcularse como el triple producto vectorial de sus
aristas
dv = (F1 × F2 ) · F3 dX1 dX2 dX3 = det(F) dV
(3.18)
3.3. Deformación especíca longitudinal
Estudiemos ahora como se ha modicado la longitud de la bra
A-B. Originalmente su longitud era dSAB
y ahora resulta
q
p
dsab = dxab · dxab = dxTab dxab
q
= ν T [1 + ∇u]T [1 + ∇u] ν dSAB
(3.19)
El producto bajo la raíz puede desarrollarse como
ν T 1 + ∇T u + ∇u + ∇T u∇u ν
(3.20)
En este curso nos concentraremos en problemas con pequeños giros,
lo que está asociado básicamente a que todas las componentes
∂ui
∂Xj
1, con lo cual podemos despreciar productos entre derivadas frente a la
derivada misma. Luego como primera aproximación al radicando nos
quedaremos con
ν T 1 + ∇T u + ∇u ν
(3.21)
Por otro lado también supondremos que las deformaciones son pequeñas, es decir que la relación entre las longitudes nal
dSAB
dsab
y original
de la bra es muy similar a 1, es decir que
dsab
=
dSAB
q ν T 1 + ∇T u + ∇u ν ≈ 1
(3.22)
lo que permite escribir como aproximación lineal (recurriendo a un
desarrollo en serie de Taylor)
Al término
dsab
1
T
T
=ν 1+
∇ u + ∇u ν
dSAB
2
(3.23)
1
∇T u + ∇u = ε
2
(3.24)
Introducción a la Teoría de Elasticidad
68
lo denominaremos tensor lineal de deformación
ε (en lo sucesivo sen-
cillamente tensor de deformación). Luego demostraremos que es un
tensor de segundo orden. Su denición en componentes resulta
1
εij =
2
∂uj
∂ui
+
∂xi ∂xj
(3.25)
por lo que es simétrico. Puede también verse como la parte simétrica
del gradiente de desplazamiento, si se escribe al mismo como:
∇u =
1
1
∇u + ∇T u +
∇u − ∇T u = ∇sim u + ∇asim u
2
2
(3.26)
En denitiva la relación entre longitud nal y original (notando que
ν T 1 ν = ν T ν = ν · ν = 1) resulta
dsab
= 1 + ν T ε ν = λν
dSAB
Con
λν
(3.27)
hemos denominado la relación entre la longitud nal y origi-
nal de una bra que originalmente estaba en la dirección
un valor de
λν > 1
ν . Claramente
λν < 1
indica que la bra se ha alargado, un valor
que se ha acortado, un valor
λν = 1
indica que no cambió su longitud.
Existen diferentes formas de denir una deformación longitudinal.
Dicha denición no es única, existen múltiples deniciones que responden a diferentes conceptos u objetivos, las más usadas son:
Ingenieril
:
E=
Logarítmica
ds − dS
=λ−1
dS
(3.28)
o natural
eln = ln
ds
dS
= ln (λ)
(3.29)
Lagrangeana
1
EL =
2
Euleriana
"
ds
dS
2
#
1 2
λ −1
2
(3.30)
"
2 #
1
dS
1
ee =
1−
=
1 − λ−2
2
ds
2
(3.31)
−1 =
Análisis General de Deformaciones
69
Para pequeñas deformaciones todas son similares y resulta indistinto
el uso de cualquiera de ellas, en tal caso resulta más sencillo usar la
primera que es una relación lineal.
Concentrándonos en la deformación ingenieril veamos entonces como evaluarla en función del tensor de deformación. Conceptualmente
de lo visto hasta ahora, podemos concluir a partir de la expresión (3.27)
que:
E ν = λν − 1 = ν T ε ν
(3.32)
ν.
ε guarda toda la información referida a los cambios
Notar que esta expresión puede aplicarse a cualquier dirección
Por lo cual el tensor
de longitudes de las bras en el punto considerado. En particular si
elegimos como
ν
a las direcciones asociadas a los ejes coordenados
ti ,
tendremos
∂u1
∂X1
∂u2
=
∂X2
∂u3
=
∂X3
E1 = (1, 0, 0) · ε · (1, 0, 0) = ε11 =
E2 = (0, 1, 0) · ε · (0, 1, 0) = ε22
E3 = (0, 0, 1) · ε · (0, 0, 1) = ε33
(3.33)
Luego los elementos de la diagonal del tensor de deformación
ε
son las deformaciones especícas longitudinales en las correspondientes
direcciones cartesianas.
3.4. Deformación especíca angular
Veamos ahora como se ha modicado el ángulo entre las bras que
originalmente estaban en las direcciones
ν
y
µ. Las posiciones actuales
de dichas bras son:
dxab = Fν dSAB = (1 + ∇u) ν dSAB
dsab = kdxab k = (1 + Eν ) dSAB = λν dSAB
(3.34)
dxac = Fµ dSAC = (1 + ∇u) µ dSAC
dsac = kdxac k = (1 + Eµ ) dSAC = λµ dSAC
(3.36)
(3.35)
(3.37)
Introducción a la Teoría de Elasticidad
70
Llamando
ν∗
y
µ∗
a las direcciones nales, realizando el producto
punto, el coseno del ángulo que forman resulta:
(1 + ∇u) ν (1 + ∇u) µ
dxab dxac
·
=
·
(3.38)
dsab dsac
λν
λµ
π
, la relación entre ángulos
en este caso, siendo el ángulo original α =
2
complementarios permite escribir (llamando ϕνµ al cambio de ángulo
cos α∗ = ν ∗ · µ∗ =
entre las bras )
cos α∗ = sin
π
2
− α∗ = sin (α − α∗ ) = sin ϕνµ ' ϕνµ
(3.39)
donde al nal se usa que el cambio de ángulo es pequeño.
Desarrollando la expresión del coseno 3.38, despreciando los términos cuadráticos en las derivadas e introduciendo la denición del tensor
de deformaciones
3
ϕνµ
3
XX
ν T (2ε) µ
' ν T (2ε) µ = 2
νi εij µj
=
λν λµ
i=1 j=1
(3.40)
Donde se ha supuesto que el denominador (λν λµ ) es sucientemente
cercano a la unidad.
Entonces a partir de
ε
es posible evaluar el cambio de ángulo en-
tre dos bras cualesquiera originalmente ortogonales, es decir que
ε
guarda también toda la información respecto a cambios de ángulo en
el entorno del punto. En particular si tomamos de a pares las bras en
las direcciones coordenadas tendremos
∂u2
∂u1
+
= ϕ21
∂X2 ∂X1
∂u1
∂u3
=
+
= ϕ31
∂X3 ∂X1
∂u2
∂u3
=
+
= ϕ32
∂X3 ∂X2
ϕ12 = (1, 0, 0) · (2ε) · (0, 1, 0) = 2ε12 =
ϕ13 = (1, 0, 0) · (2ε) · (0, 0, 1) = 2ε13
ϕ23 = (0, 1, 0) · (2ε) · (0, 0, 1) = 2ε23
(3.41)
En consecuencia es posible dar un signicado físico a las componentes no diagonales del tensor de deformación con lo cual este resulta
E1
1
ϕ
2 12
E2
ε=
sim.
1
ϕ
2 13
1
ϕ
2 23
E3
(3.42)
Análisis General de Deformaciones
71
3.5. Deformación Especíca Volumétrica
Finalmente analicemos como ha cambiado el volumen del hexaedro
original. Utilizando la expresión del triple producto vectorial
dv = (dxab × dxac ) · dxad = (ν ∗ × µ∗ ) · ρ∗ λν λµ λρ dSAB dSAC dSAD
= λν λµ λρ dV0 = (1 + Eν ) (1 + Eµ ) (1 + Eρ ) dV
(3.43)
La expresión obtenida resulta de suponer que los cambios de ánν ∗ ,µ∗ y ρ∗ son pequeños, si bien ahora no
gulo entre las direcciones
son mutuamente ortogonales, el triple producto vectorial entre ellas es
muy cercano a la unidad (la diferencia es proporcional al cuadrado del
cambio de ángulo por lo cual puede despreciarse en aproximaciones
lineales). Desarrollando ahora el producto entre los binomios y despreciando productos entre las deformaciones longitudinales, el volumen
actual resulta
dv = [1 + (Eν + Eµ + Eρ )] dV
(3.44)
Podemos ahora denir la deformación volumétrica
dv
dv − dV
=
−1
dV
dV
= Eν + Eµ + Eρ
∆=
(3.45)
(3.46)
Es decir que la deformación especíca volumétrica puede calcularse
como la suma de las deformaciones especícas longitudinales en tres direcciones mutuamente ortogonales. Si elegimos como dichas direcciones
a las direcciones cartesianas tendremos
∆ = E1 + E2 + E3
= ε11 + ε22 + ε33 = tr(ε)
∂u2
∂u3
∂u1
+
+
= div (u)
=
∂X1 ∂X2 ∂X3
(3.47)
(3.48)
(3.49)
Naturalmente la deformación volumétrica en el punto no depende
de la elección del sistema cartesiano, esto se ve en la última expresión
(div(u)). El valor exacto de la deformación volumétrica puede calcularse a partir de la expresión (3.18) y la denición (3.45):
∆ = det (F) − 1
que linealizada conduce a la expresión (3.49).
Introducción a la Teoría de Elasticidad
72
3.6. Sobre el tensor de deformaciones
Los desarrollos anteriores han permitido expresar las componentes
del tensor de deformaciones (3.25) invirtiendo las expresiones obtenidas
para deformaciones longitudinales y angulares, obteniendo la relación
(3.42).
ε
Resulta necesario demostrar que efectivamente
es un tensor de
segundo orden, es decir que son necesarias dos matrices de transforma-
(l1 , l2 , l3 )
ción para obtener las componentes del tensor en un sistema
a partir de las componentes en un sistema
(t1 , t2 , t3 ).
Sea
Λ
la matriz
de transformación que liga ambos sistemas, es decir
[t1 , t2 , t3 ] = [l1 , l2 , l3 ] ΛT
[l1 , l2 , l3 ] = [t1 , t2 , t3 ] Λ
λij = ti · lj
(3.50)
(3.51)
Cualquier vector en el nuevo sistema puede expresarse en función
de sus componentes en el sistema original, en particular el vector de
coordenadas y el de desplazamientos
Y = ΛT X
(3.52)
T
v=Λ u
(3.53)
notemos que el gradiente de los desplazamientos en el nuevo sistema
resulta ahora: (al tener dos sistemas de coordenadas independientes
denotemos con un subíndice en
∇
respecto a que sistema estamos de-
rivando)
" 3
X ∂
∂X
∂
∂vm
T
=
=
Λ u
∇l v =
∂Yn
∂X
∂Y
∂Xj
j=1
3
X
!
λim ui
i=1
∂Xj
∂Yn
#
(3.54)
"
=
3 X
3
X
λim
i=1 j=1
∂ui
∂Xj
#
λjn = ΛT (∇t u) Λ
(3.55)
Λ−1 = ΛT
. Reemplazando en
donde hemos usado la condición de que
la denición del tensor
ε̄ =
ε̄
en el nuevo sistema de coordenadas
1
1
∇l v + ∇Tl v = ΛT ∇t u + ∇Tt u Λ = ΛT ε Λ
2
2
(3.56)
lo que demuestra que el tensor de deformaciones es efectivamente un
tensor de segundo orden.
Análisis General de Deformaciones
73
3.7. Direcciones principales de deformación
Debido a que es un tensor de 2do orden simétrico (similar al de
tensiones), tendrá tres autovalores reales (εI ,
εII , εIII ) y
(ν I , ν II ,ν III ).
tres auto-
vectores asociados mutuamente ortogonales
El proble-
ma de autovalores y autovectores puede formularse considerando dos
direcciones,
ν
y
µ,
inicialmente ortogonales, que no sufren cambio de
ángulo entre ellas durante el proceso de deformación:
ϕµν = µT (2ε) ν = 0
(3.57)
Puede observarse que el vector resultante de proyectar el tensor de
deformaciones en la dirección
por lo tanto, perpendicular a
ν , εν = εν , debe resultar paralelo a ν y,
µ. De esta manera, puede escribirse que:
εν = εν = ε1ν
(3.58)
ε es un escalar que representa la elongación de la bra en la
ν:
Donde
dirección
Eν = ν T ε 1 ν = ε
(3.59)
De esta manera, los valores de elongación y direcciones para las
cuales no existe cambio de ángulo resultan de un problema de valores
y vectores propios:.
εν − ε1ν = [ε − ε1]ν = 0
Los autovalores resultantes, (εI ,
en las direcciones (ν I ,
ν II ,ν III ).
(3.60)
εII , εIII ), representan elongaciones
Estas direcciones, ortogonales entre
sí, no sufren cambio de ángulo durante la deformación,ϕI II
= ϕII III =
ϕI III = 0. El tensor de deformación expresado en el sistema cartesiano
asociado a las direcciones principales resulta entonces:
ε=
εI
εII
(3.61)
εIII
Luego, estas tres bras tienen la particularidad de que siendo ortogonales en la geometría original también lo son en la geometría deformada, es decir que en cada punto del cuerpo, sin importar el nivel de
Introducción a la Teoría de Elasticidad
74
deformaciones, siempre hay tres direcciones que mantienen su ortogonalidad y son las que tienen las deformaciones longitudinales extremas
(máximas y mínimas). Si se visualiza el entorno de un punto como una
esfera antes de la deformación, dicha esfera se transforma en un elipsoide cuyos ejes son la posición deformada de las direcciones principales
del tensor.
Similarmente al tensor de tensiones es posible descomponer al tensor de deformaciones en una parte volumétrica y en una parte desviadora. La componente volumétrica es un tercio de la traza del tensor
εM =
1
∆
1
tr (ε) =
(ε11 + ε22 + ε33 ) =
3
3
3
(3.62)
Multiplicada por el tensor identidad
εM
εM
εv =
(3.63)
εM
La componente desviadora resulta entonces de la diferencia entre
el tensor y la componente volumétrica
ε11 − εM
ε12
ε13
ε21
ε22 − εM
ε23
e = ε − εv =
ε13
ε32
ε33 − εM
(3.64)
Similarmente al caso del tensor de tensiones es posible denir invariantes del tensor de deformaciones y de su componente desviadora.
3.8. Vector deformación y vector rotación∗
Si se observan las expresiones obtenidas para las deformaciones
especícas longitudinales
ενν
y angulares
ενµ
y se las compara con
las obtenidas para las componentes de tensión normal
σνµ
σνν
y tangencial
se observará una total analogía
Deformaciones
Longitudinal
Angular
Tensiones
T
ενν = ν εν
ενµ = µT εν
Normal
Cortante
σνν = ν T σν
σνµ = µT σν
Análisis General de Deformaciones
75
A su vez en el caso de tensiones hemos denido el concepto de
vector tensión asociado con una dirección
ν
cuyas componentes son
precisamente las indicadas arriba. Sin embargo para el caso de deformaciones no lo hemos hecho pues a un tal vector deformación asociado
a dirección
ν
εν = εν
(3.65)
que si bien permite determinar la componente
ενν
proyectándolo sobre
el plano y el cambio de ángulo con cualquier bra
plano
ενµ
µ
contenida en el
no presenta una interpretación física clara.
Por otro lado al tratar el movimiento de una bra, la expresión
3.15 expresa el desplazamiento relativo de los extremos de una bra
innitesimal en la dirección
ν
1
1
duν
= ∇u ν =
∇u + ∇T u ν +
∇u − ∇T u ν
dSν
2
2
= εν + ων
(3.66)
(3.67)
en tanto que ya en 3.26 ya habíamos utilizado la descomposición de
∇u
en sus partes simétrica y antisimétrica.
La expresión anterior dice que el desplazamiento relativo entre dos
puntos a lo largo de una dirección arbitraria
ν
está compuesto de
una deformación (εν ) y de algo más (ων ). Esto último no puede ser
deformación ya que hemos visto que toda la deformación está incluida
en el término
εν , por lo cual el segundo término implica sólo rotación
ω (puede
que es un tensor en la misma forma que ε ) que de su
de cuerpo rígido. Esta rotación queda denida por el tensor
demostrarse
denición es antisimétrico
1
∇u − ∇T u
2
1 ∂ui
∂uj
ωij =
−
2 ∂Xj
∂Xi
ω=
(3.68)
ωii = 0
ωij = −ωji
Geométricamente sabemos que una rotación nita se dene por
−1
una matriz orto-normal (Λ
= ΛT ) que para el caso de una rotación
pequeña se puede escribir en forma aproximada como la suma de la
identidad
1
y un tensor antisimétrico.
Λ=1+ω
(3.69)
Introducción a la Teoría de Elasticidad
76
de esta forma si se tiene un vector cualquiera
ν
y se lo rota, su nueva
posición es
ν ∗ = Λν = (1 + ω) ν = ν + ων
(3.70)
luego la diferencia entre el vector nal (rotado) y el inicial es
ν ∗ − ν = ∆ν = ων
(3.71)
A diferencia de un tensor simétrico que tiene 3 autovalores reales,
un tensor antisimétrico tiene 2 autovalores imaginarios puros y un autovalor nulo. El autovector asociado al autovector nulo se denomina
vector axial
w
que por denición satisface
ωw = 0w = 0
(3.72)
puede mostrarse fácilmente que las componentes de este vector son
w1
ω32
ω23
w = w2 = ω13 = − ω31
w3
ω21
ω12
(3.73)
y además que
ων = w × ν
Al vector
w
se lo denomina vector rotación lineal y dene lo-
calmente el giro promedio del sólido en el punto. Decimos promedio
porque no todas las bras giran lo mismo, esto depende también del
ε. Si el sólido no sufriera deformación alguna
= 0) entonces w deniría completamente el
giro de todas las bras en el punto. La dirección del vector w indica
el eje de rotación y su módulo el ángulo girado. Cada componente wi
expresa el promedio que han girado alrededor del eje ti las bra ubicatensor de deformaciones
durante el movimiento (ε
das en el plano normal a dicho eje. Si interesa conocer el giro promedio
alrededor de cualquier otro eje, hay que calcular la componente de
w
sobre dicho eje.
3.8.1. Transformación de Componentes de Rotación
Se ha visto que de los componentes de rotación
ωij
hay sólo tres
independientes y que constituyen las componentes de un vector, por lo
Análisis General de Deformaciones
77
tanto transforman de un sistema coordenado a otro empleando solamente un coseno director. Por lo cual la transformación de coordenadas
toma la forma
w 0 = ΛT w
(3.74)
En apariencias existe una incongruencia pues el tensor de rotación
ω
transforma como un tensor de segundo orden
ω̄ = ΛT ωΛ
(3.75)
Para demostrar que la contradicción es sólo aparente, notemos que
por denición el único autovector real de
ω̄
debiera ser
w̄,
observemos
que es así
ω̄ w̄ = ΛT ωΛ
ΛT}w = ΛT (ωw) = 0
| {z
(3.76)
1
3.9. Ecuaciones de Compatibilidad∗
Si se conocen los componentes de desplazamiento
ui
en un cuerpo
deformado, las seis ecuaciones cinemáticas 3.25, permiten evaluar las
componentes del tensor de deformaciones
ε.
Sin embargo, el proble-
ma inverso no es tan simple: si se conocen las seis componentes del
tensor de deformaciones, deberán integrarse seis ecuaciones en derivadas parciales de las
ui para encontrar los desplazamientos. La dicultad
matemática radica en que se tienen seis ecuaciones en derivadas parciales para solamente tres funciones desconocidas, lo que sobredetermina
las tres funciones incógnitas
ui .
Físicamente sabemos que dado un campo de deformaciones, los desplazamientos asociados son únicos (a excepción de un movimiento de
cuerpo rígido). De modo que puede anticiparse que deben existir por
lo menos tres ecuaciones adicionales, que liguen los
εij
entre sí. Esas
ecuaciones a que se hace referencia son las ecuaciones de compatibilidad.
Para deducir las ecuaciones de compatibilidad, supóngase que existe una solución
ui
a las ecuaciones cinemáticas 3.25 y que esa solución
es continua en sus derivadas terceras. Las derivadas parciales mixtas
de los desplazamientos son iguales cuando se cambia el orden de derivación.
Introducción a la Teoría de Elasticidad
78
Si se deriva
ε12
respecto a
X1
y
X2
y se expresa el resultado en
términos de desplazamientos, se tiene:
2
∂ 3 u1
∂ 3 u2
∂ 2 ε12
=
+
∂X1 ∂X2
∂X22 ∂X1 ∂X12 ∂X2
(3.77)
Por otra parte, sumando
∂ 2 ε11
∂X22
y
∂ 2 ε22
∂X12
y expresando el resultado en términos de desplazamientos, se tiene
∂ 3 u1
∂ 3 u2
∂ 3 u1
∂ 3 u2
+
=
+
∂X22 ∂X1 ∂X12 ∂X2
∂X22 ∂X1 ∂X12 ∂X2
(3.78)
Igualando las ecuaciones 3.77 y 3.78 se deduce que
∂ 2 ε12
∂ 2 ε11 ∂ 2 ε22
+
=
2
∂X22
∂X12
∂X1 ∂X2
Intercambiando índices, pueden obtenerse otras dos ecuaciones similares.
Otras tres ecuaciones pueden obtenerse de la siguiente forma: se
deriva
ε12
respecto a
resultados:
X1 y X3 ; ε13 respecto a X2
2
∂ 2 ε31
∂ ε12
+
2
∂X1 ∂X3 ∂X2 ∂X1
y
X1
∂ 3 u1
∂ 3 u2
∂ 3 u3
+
+
∂X1 ∂X2 ∂X3 ∂X12 ∂X3 ∂X12 ∂X2
parte, se deriva ε11 respecto a X2 y X3 ; ε23
=2
Por otra
y se suman los
(3.79)
respecto a
Xi
dos veces; y se suman los resultados; se logra así:
2
=2
∂ 2 ε11
∂ 2 ε23
+
∂X2 ∂X3
∂X12
∂ 3 u1
∂ 3 u2
∂ 3 u3
+
+
∂X1 ∂X2 ∂X3 ∂X12 ∂X3 ∂X12 ∂X2
Igualando las ecuaciones 3.79 y 3.80 se llega a
∂ 2 ε11
∂ 2 ε12
∂ 2 ε31
∂ 2 ε23
=
+
−
∂X2 ∂X3
∂X1 ∂X3 ∂X2 ∂X1
∂X12
(3.80)
Análisis General de Deformaciones
79
Intercambiando subíndices, pueden lograrse otras dos ecuaciones.
El conjunto de seis ecuaciones al que se ha llegado puede entonces
escribirse de la siguiente forma:
∂ 2 ε11 ∂ 2 ε22
∂ 2 ε12
+
−
2
=0
∂X22
∂X12
∂X1 ∂X2
∂ 2 ε22 ∂ 2 ε33
∂ 2 ε23
=
+
−
2
=0
∂X32
∂X22
∂X2 ∂X3
∂ 2 ε11 ∂ 2 ε33
∂ 2 ε13
=
+
−
2
=0
∂X32
∂X12
∂X1 ∂X3
−s33 =
−s11
−s22
(3.81)
∂ 2 ε11
∂
∂ε12 ∂ε31 ∂ε23
+
+
−
=0
∂X2 ∂X3 ∂X1 ∂X3 ∂X2 ∂X1
∂ 2 ε22
∂
∂ε23 ∂ε12 ∂ε31
=−
+
+
−
=0
∂X1 ∂X3 ∂X2 ∂X1 ∂X3 ∂X2
∂ 2 ε33
∂
∂ε23 ∂ε13 ∂ε12
=−
+
+
−
=0
∂X1 ∂X2 ∂X3 ∂X1 ∂X2 ∂X3
−s23 = −
−s31
−s12
Con la denición de variables
sij
de las ecuaciones 3.81, las mismas
pueden escribirse como
sij = 0
(3.82)
Estas seis ecuaciones 3.81 son las condiciones que deben cumplir las
deformaciones
εij
para que sean integrables y se denominan ecuaciones
de compatibilidad de Saint Venant. Las componentes
sij
constituyen
el llamado tensor de incompatibilidad y la ecuación de compatibilidad
hace que cada componente de
sij
se anule.
Nótese que las condiciones para compatibilidad desarrolladas están
restringidas a pequeñas deformaciones y giros, debido a que se ha usado
la relación cinemática lineal. En el desarrollo anterior no se impuso
ninguna condición sobre las características del material y por lo tanto
las ecuaciones de compatibilidad deben satisfacerse también en la teoría
de plasticidad.
El signicado físico de las ecuaciones de compatibilidad puede comprenderse si se imagina al cuerpo dividido en pequeños cubos antes del
proceso de deformación. Después de las deformaciones, cada cubo habrá sufrido su propia deformación y la piezas no podrán ensamblarse
entre si, dejando huecos entre ellos. Pero si las deformaciones de cada
Introducción a la Teoría de Elasticidad
80
cara se relacionan con los de la cara correspondiente del cubo vecino
mediante las ecuaciones de compatibilidad, entonces las piezas volverán a ensamblarse para formar un cuerpo continuo. Por lo tanto, estas
ecuaciones garantizan que no se producirán huecos ni superposiciones
en el cuerpo deformado.
Resta discutir el número de ecuaciones de compatibilidad que son
independientes. Los valores de
sij
denidos en las ecuaciones 3.81 cum-
plen con algunas relaciones independientemente que serán cero si son
compatibles. Se pueden demostrar que tales relaciones son que la divergencia del tensor de incompatibilidad es nula
3
X
∂sij
i=1
∂Xi
=0
(3.83)
Las tres ecuaciones anteriores fueron formuladas por primera vez
por S. Moriguti en 1947. Por lo tanto, se deduce que las seis ecuaciones
de compatibilidad no son independientes entre sí, sino que sólo tres
resultan independientes. De todos modos, el procedimiento usual para
vericar compatibilidad es satisfacer las seis ecuaciones de compatibilidad en el interior del cuerpo.
Es posible demostrar que las ecuaciones de compatibilidad son condición necesaria y suciente para obtener un campo de desplazamientos único en dominios simplemente conexos. Se dice que un dominio es
simplemente conexo cuando cualquier curva cerrada puede reducirse
en sus dimensiones hasta llegar a un punto (vale decir, es un dominio
que no tiene agujeros interiores). Esa demostración no será realizada
aquí.
3.10. Conclusión
Se ha demostrado que en cada punto de un sólido deformado es
posible descomponer la deformación local de todas las bras en una
deformación sin rotación más una posterior rotación de cuerpo rígido.
Nótese que en cada punto del sólido hay tres direcciones ortogonales
(bras) que se deforman longitudinalmente pero que no cambian de
ángulo entre si (las direcciones principales asociadas a las deformaciones principales). Esto permite pensar a la deformación en un punto
como la deformación longitudinal de tres bras ortogonales más una
Relaciones Constitutivas de un Material
rotación de dicha terna. Las componentes
81
wi
son las componentes del
vector rotación correspondiente, denido el vector rotación como el eje
alrededor del cual se rota con módulo igual al ángulo que se rota.
82
Introducción a la Teoría de Elasticidad
Capítulo 4
Relaciones Constitutivas de un
Material
El tipo de material que constituye un sólido interviene, en general, como una transformación que relaciona los tensores de tensiones
y de deformaciones en el entorno de un punto. Hay muchos modelos
propuestos para expresar esas propiedades, de los cuales se estudian en
primer lugar los correspondientes a materiales elásticos e isótropos, que
conducen a ecuaciones sencillas y que por mucho tiempo fueron la base
de la mecánica de los sólidos, convirtiéndola en Teoría de Elasticidad.
En segundo lugar, se presentan modelos visco-elásticos. Finalmente, se
discuten distintos criterios de uencia y sus características principales.
4.1. Introducción
En los capítulos anteriores se vio que las ecuaciones de equilibrio y
las cinemáticas resultaban independientes del material que constituye
el cuerpo estudiado. Sin embargo, para poder denir un problema en
forma completa es necesario incluir relaciones que caractericen el comportamiento del material. El objetivo de este capítulo es plantear ecuaciones que sean propias del comportamiento de determinados modelos
de materiales y que representen materiales empleados en ingeniería.
Los materiales sólidos, aun restringiéndonos a aquellos que se emplean frecuentemente en ingeniería, tienen gran variedad de comportamiento. Además, para un material determinado (por ejemplo, un
acero), el comportamiento depende a su vez de varios factores, como
83
Introducción a la Teoría de Elasticidad
84
el nivel tensional, la temperatura y el tiempo durante el cual se mantienen aplicadas las cargas. Para representar el comportamiento de
materiales se emplean modelos o idealizaciones de los mismos, a través
de funciones
f1 (σ , T , t) y f2 (ε, T , t),
t el tiempo.
donde
T
representa la variable
temperatura y
Existe una base física y experimental que permite incluir, en la
denición de un modelo en mecánica, las características del material a
través de relaciones entre tensiones y deformaciones desde un punto de
vista macroscópico. Tales relaciones pueden tomar la forma siguiente
f1 (σ) = f2 (ε, T, t)
(4.1)
que se denominan ecuaciones constitutivas del material. Estas ecuaciones serán adecuadas en la medida que se aproximen a los resultados
experimentales para el rango de carga, temperatura y tiempo considerados.
Como casos particulares pueden establecerse modelos de materiales
en los cuales la respuesta es independiente de la temperatura y del
tiempo (como son la mayoría de los que vemos en este capítulo). En
ese caso, las ecuaciones se reducen a la forma
f1 (σ) = f2 (ε)
(4.2)
Adicionalmente, las relaciones tensiones-deformaciones pueden ser
de tipo elástico o presentar plasticidad a partir de un cierto nivel tensional. En todo caso debe recordarse que los modelos que se discuten
son aproximaciones, cuya exactitud depende del material y del rango de las variables en el cual se pretende representar la respuesta del
material.
Se dice que un material es
isótropo
cuando sus propiedades son
las mismas en cualquier dirección que se considere. En caso contrario, el material es
anisótropo.
Pueden existir planos de simetría en
el material; si existen tres planos de simetría el material se denomina
ortótropo.
Los modelos discutidos en este capítulo corresponden
a idealizaciones de materiales isótropos, salvo que se indique expresamente lo contrario.
En lo que sigue se comenzarán estudiando los modelos más simples
de materiales, para luego discutir modelos de comportamiento más
complejo en los cuales aparecen límites de inicio de plasticidad
Relaciones Constitutivas de un Material
85
4.2. Materiales Linealmente Elásticos
4.2.1. Estado Unidimensional de Tensiones y
Deformaciones
En un material elástico existe una relación biunívoca entre tensiones
y deformaciones, de modo que tanto para carga como para descarga,
puede escribirse la relación
σij = f2 (ε)
(4.3)
εij = f1 (σ)
(4.4)
o bien
En la gura 4.1 se muestra el diagrama entre tensiones y deformaciones que ocurren en la misma dirección. Estos estados se denominan
unidimensionales cuando no hay tensiones o deformaciones en las otras
direcciones.
σ
0
ε
Figura 4.1: Comportamiento elástico no lineal en una dimensión.
Si la función
f2
es lineal se podrá escribir una relación del tipo
0
0
σ11 = c ε11 − ε011 + σ11
= cε11 − cε011 + σ11
para estado unidimensional en sentido
X1
(4.5)
y se dice que el material
es linealmente elástico. Por mucho tiempo, la mecánica de cuerpos
deformables se basó en la llamada Ley de Hooke, que se expresa como
σ11 = E ε11
(4.6)
Introducción a la Teoría de Elasticidad
86
donde
E
es el módulo de elasticidad longitudinal del material. La -
gura 4.2 ejemplica este tipo de material. No existe ningún material
que reaccione elásticamente ante todo sistema de esfuerzos, pero para
valores pequeños de deformación y tensión el empleo de la ley de Hooke
es una buena aproximación en muchos materiales.
El factor de proporcionalidad diere según se trate de efectos isótropos o bien de efectos distorsionales. Para efectos distorsionales en un
único plano (un estado de corte uniforme aparece por ejemplo en la
torsión de un tubo de pared delgada) se tiene
σ12 = 2Gε12
donde
G
es el módulo de elasticidad transversal del material, que se
relaciona con
E
mediante la expresión:
G=
donde
o de
E
ν
y
(4.7)
E
2 (1 + ν)
(4.8)
es la relación de Poisson del material. Los valores de
ν
E
y
G
deben ser determinados en forma experimental para cada
material.
σ
E
1
σ0
0
ε0
ε
Figura 4.2: Sólido elástico lineal en una dimensión.
4.2.2. Estado Tridimensional de Tensiones y
Deformaciones
Cuando el estado tensional es tridimensional, en lugar de relacionarse individualmente las tensiones con las deformaciones asociadas,
Relaciones Constitutivas de un Material
87
será necesario encontrar la relación entre los tensores de tensión y de
deformación en el entorno de un punto, de modo que resultarán ecuaciones constitutivas para material elástico lineal del tipo
σij =
3 X
3
X
Cijkl εkl
(4.9)
k=1 l=1
σ=C:ε
(4.10)
Estas son ecuaciones de origen experimental. donde
Cijkl
es un tensor
de cuarto orden, llamado tensor de elasticidad, y contiene 81 componentes que son coecientes de elasticidad del material. Debido a la
simetría de los tensores de tensiones y deformaciones existen sólo seis
componentes independientes de cada uno de ellos, luego
Cjilk = Cijlk
Cijkl = Cjikl =
por lo que la cantidad de componentes independientes del
tensor de elasticidad no podrá ser mayor de 36. Consideraciones referidas al estado libre de tensiones (σ
=0
en correspondencia con
ε = 0)
y a la existencia de una energía de deformación elástica, limitan la
cantidad de componentes independientes a sólo 21.
En el caso de materiales ortótropos el número de componentes independientes se reduce a nueve. Si el material es isótropo, las componentes
Cijkl
no dependen del sistema coordenado utilizado. Un análisis
de los tensores isótropos de cuarto orden conduce a que no puede haber
más de dos constantes independientes. Expresado en términos de estas
dos constantes (λ y
µ), se puede demostrar que el tensor de elasticidad
resulta
Cijkl = δij δkl λ + (δik δjl + δil δjk ) µ
(4.11)
4.2.3. Material Elástico, Lineal e Isótropo
Se desarrollarán a continuación las ecuaciones constitutivas para
material elástico, isótropo, con relaciones de tipo lineal. Para ello se
distinguen las componentes esféricas y desviadoras de los tensores
ε,
σ
y
como se vio en los capítulos anteriores:
σ = 1σM + s
(4.12)
ε = 1εM + e
(4.13)
∆
, que representan ten3
sión hidrostática uniforme y dilatación cúbica respectivamente, pueden
Las componentes esféricas
σM = p
y
εM =
Introducción a la Teoría de Elasticidad
88
relacionarse a través del módulo volumétrico,
K . Este módulo se dene
en resistencia de materiales como
K=
E
3(1 − 2ν)
(4.14)
Se recuerda que en materiales isótropos el rango del módulo de
Poisson es
0 ≤ ν ≤ 0,5
(4.15)
Las relación constitutiva para la componente esférica resulta así
p = K∆ = K (ε11 + ε22 + ε33 )
Las componentes desviadoras
sij
y
eij ,
(4.16)
que representan tensiones
cortantes y deformaciones angulares, pueden relacionarse a través del
módulo de elasticidad transversal,
G
sij = 2Geij
s = 2Ge
(4.17)
(4.18)
Reemplazando las ecuaciones 4.16 y 4.17 en la 4.12 resulta
σij = δij K∆ + 2Geij
σ = K∆1 + 2Ge
o escrito en función de
E
y
(4.19)
(4.20)
ν
ν
E
∆
εij + δij
σij =
1+ν
1 − 2ν
E
ν
σ=
ε+
∆1
1+ν
1 − 2ν
(4.21)
(4.22)
La ecuación anterior relaciona cada una de las componentes del
σij con las componentes del tensor de deformaciones
ειj . Se observa que las ecuaciones 4.21 dependen de sólo dos constantes
de elasticidad: E y ν . Para un material como el acero, estas ecuaciones
lineales son adecuadas si las deformaciones son inferiores a 0,001 y si
tensor de tensiones
no hay cambios apreciables en la temperatura.
Relaciones Constitutivas de un Material
Particularizando para
i=j=1
89
se tiene:
σ11
E
ν
=
ε11 +
(ε11 + ε22 + ε33 )
1+ν
1 − 2ν
E
1−ν
ν
ν
=
ε11 +
ε22 +
ε33
1 + ν 1 − 2ν
1 − 2ν
1 − 2ν
Generalizando,
σ11
σ22
σ33
E
=
1+ν
E
=
1+ν
E
=
1+ν
1−ν
ν
ε11 +
(ε22 + ε33 )
1 − 2ν
1 − 2ν
1−ν
ν
ε22 +
(ε11 + ε33 )
1 − 2ν
1 − 2ν
1−ν
ν
ε33 +
(ε11 + ε22 )
1 − 2ν
1 − 2ν
(4.23)
Se concluye que para un sólido isótropo, las componentes normales
de tensión (las de la diagonal principal del tensor) sólo dependen de
las componentes normales de deformación.
De manera similar se pueden obtener los otros valores de
σij
explí-
citamente:
E
ε12
1+ν
E
ε13
σ13 =
1+ν
E
σ23 =
ε23
1+ν
depende de ε12 . La
σ12 =
Nótese que
σ12
sólo
(4.24)
conclusión general para
sólidos lineales, elásticos e isótropos, en estados tridimensionales de
tensiones y deformaciones, es que las componentes de la diagonal principal de
de
εij ;
σij
sólo dependen de las componentes de la diagonal principal
mientras que las componentes fuera de la diagonal de
relacionan con las correspondientes de
σij
se
εij .
De las ecuaciones 4.21 también se pueden explicitar las deformaciones en función de las tensiones, resultando
ν
1+ν
εij =
σij − δij
3p
E
1+ν
1+ν
ν
ε=
σ−
3p1
E
1+ν
(4.25)
(4.26)
Introducción a la Teoría de Elasticidad
90
En lugar de usar los parámetros
E
y
ν
las ecuaciones 4.21 y 4.25
se pueden simplicar empleando los llamados
λ
y
µ
parámetros de Lamé
y resultan
σij = 2µεij + δij λ∆
σ = 2µε + λ∆1
(4.27)
(4.28)
λ
1
σij − δij
3p
2µ
2µ (3λ + 2µ)
1
λ
ε=
σ−
3p1
2µ
2µ (3λ + 2µ)
εij =
(4.29)
(4.30)
donde los parámetros de Lamé se denen como:
λ=
νE
2
=K− G
(1 + ν) (1 − 2ν)
3
(4.31)
E
=G
2 (1 + ν)
(4.32)
µ=
4.2.4. Relaciones entre las direcciones principales
de tensión y de deformación en elasticidad
lineal
En el capítulo de tensiones vimos que las direcciones principales de
tensión cumplen con la condición
(σ − σ1) ν = 0
donde
σ
o bien
σν = σ ν
es un escalar que anula el problema de valores propios. Para
las deformaciones principales, se tendrá
(ε − ε1) µ = 0
o bien
εµ = ε µ
Supongamos inicialmente que las direcciones
dentes. Computaremos
σµ,
ν
y
µ
no son coinci-
o sea el producto del tensor de tensiones
por una dirección principal de deformaciones, usando las ecuaciones
constitutivas elásticas
E
σµ =
1+ν
ε+
ν
∆1 µ
1 − 2ν
Relaciones Constitutivas de un Material
91
Usando la condición de autovalores de deformación, se puede sustituir
εµ = ε µ
y
1µ = µ
E
σµ =
1+ν
Si llamamos
E
σ=
1+ν
ε+
ν
∆1 µ
1 − 2ν
ν
ε+
∆
1 − 2ν
resulta
σµ = σ µ
que es la condición de estado principal de tensiones. Por lo tanto, las
direcciones
ν
y
µ
son coincidentes. En resumen, en elasticidad lineal,
las direcciones principales de tensión coinciden con las de deformación.
Los valores principales de tensión no resultan proporcionales directamente a los respectivos valores principales de deformación. De
acuerdo a lo visto anteriormente,
ν
E
∆
εI +
σI =
1+ν
1 − 2ν
E
ν
σII =
∆
εII +
1+ν
1 − 2ν
E
ν
σIII =
εIII +
∆
1+ν
1 − 2ν
Esto signica que en el espacio de deformaciones principales, los
tensores de deformaciones no aparecen en puntos correspondientes a
los del espacio de tensiones, aun a pesar de la diferencia de escalas que
existe entre ambos espacios, debido al término asociado a
∆.
4.3. Deformaciones de Origen Térmico
Si bien supondremos que la inuencia de los cambios térmicos sobre las constantes del material son despreciables; sin embargo, debemos
considerar las dilataciones que traen aparejadas, con valores de desplazamientos que pueden ser del orden de los que producen las cargas.
Si un material es térmicamente isótropo, es decir que la temperatura
produce iguales efectos independientemente de la dirección considerada, las deformaciones térmicas producidas por una ley de variación de
Introducción a la Teoría de Elasticidad
92
temperaturas
∆T
en el cuerpo, son:
ε011 = ε022 = ε033 = α∆T
(4.33)
ε012 = ε013 = ε023 = 0
donde
α
es el coeciente de dilatación térmica que debe ser determi-
nado en forma experimental. Observar que el cambio térmico produce
0
sólo deformaciones volumétricas (∆ = 3α∆T ) pero no distorsiones.
Las deformaciones térmicas de las 4.33 deberán sumarse a las debidas a tensiones de la 4.25, de modo que
1+ν
ε=
E
σ−
ν
p 1 + ε0
1+ν
o bien
1+ν
ν
ε=
3p 1 + α∆T 1
σ−
E
1+ν
ν
1+ν
=
σ + − 3p + α∆T 1
E
E
(4.34)
(4.35)
Debe aclararse que hay casos en los que una variación térmica no
produce tensiones y por lo tanto no interesa ser considerada:
(a)
Si se estudian las ecuaciones de compatibilidad, se ve que si la
ley de variación de
∆T
es lineal en
X1 , X 2 , X3
no producirá
ningún efecto en las ecuaciones de compatibilidad (que dependen
de derivadas segundas de
Pero si
∆T
εij )
y no habrá tensiones inducidas.
es no lineal y las deformaciones térmicas no cumplen
las condiciones de compatibilidad, entonces surgirán tensiones
internas y deformaciones adicionales.
(b)
Si la variación térmica es tal que se cumplen las condiciones de
compatibilidad y no hay restricciones geométricas externas a las
deformaciones térmicas no habrá tensiones inducidas por efectos
térmicos. Pero si las condiciones de contorno del cuerpo no permiten que se produzcan los desplazamiento asociados al cambio
de temperatura, entonces surgirán tensiones de origen térmico.
Relaciones Constitutivas de un Material
93
4.4. Energía Interna de Deformación
4.4.1. Denición
Sea la función
ω,
que llamaremos densidad de energía de deforma-
ción, tal que para un material elástico bajo un estado tensional dado, el
incremento en la misma debido a un incremento de deformación vale:
dω =
X
σij dεij = σ : dε
(4.36)
i,j
La densidad
ω
se dene de modo que sólo depende de
εij ,
por lo
cual su diferencial se calcula en la forma
dω =
X ∂ω
∂ω
dεij =
: dε
∂εij
∂ε
i,j
(4.37)
Comparando la 4.36 con la 4.37, se desprende que
∂ω
∂εij
∂ω
σ=
∂ε
σij =
(4.38)
(4.39)
La ecuación anterior nos indica que la función
ω
es tal que deri-
vándola con respecto a las componentes del tensor de deformaciones
se obtienen las correspondientes componentes del tensor de tensiones;
de manera que
ω
implica la existencia de una relación constitutiva. En
la Figura 4.3 se muestra una relación constitutiva en una dimensión
y se ve que la energía de deformación está representada por el área
encerrada debajo de la curva.
La densidad de energía interna de deformación es la energía por
unidad de volumen llevado a cabo sobre un elemento durante la deformación, y existe para ciertos procesos reversibles, o sea cuando el
comportamiento del material es elástico, sea lineal o no.
Para un sólido linealmente elástico, la energía interna de deformación almacenada por unidad de volumen está dada por
ω=
1
1X
εij σij = σ : ε
2 i,j
2
(4.40)
Cada término de la suma en el segundo miembro de la ecuación
4.40 está producido por las fuerzas internas
σij
actuando sobre las
Introducción a la Teoría de Elasticidad
94
Figura 4.3: Energía interna de deformación
deformaciones
σij
y
εij .
El factor
1
obedece a la linealidad supuesta entre
2
εij .
Si además de ser lineal, el sólido elástico es isótropo, se tendrá (ver
ecuación 4.21 ):
σij = 2µεij + λδij ∆
(4.41)
Sustituyendo en la 4.40, se llega a
1X
[(2µεij + δij λ∆)εij ]
2 i,j
X
λ
2
=
µεij + δij εij ∆
2
i,j
ω=
(4.42)
Finalmente,
X
λ 2
λ
2
µεij + ∆ = µε : ε + (trε)2
ω=
2
2
i,j
que es la expresión de
ω
como una función cuadrática de
(4.43)
εij .
La ecua-
ción 4.43 se escribe en forma desarrollada como
λ
ω = µ ε211 + ε222 + ε233 + 2µ ε212 + ε231 + ε223 + ∆2
2
(4.44)
Relaciones Constitutivas de un Material
Nótese que si
ω > 0.
tonces
εij = 0
entonces
Por lo tanto
ω
95
ω = 0.
Además, si
εij 6= 0,
en-
es una función positiva denida de las
deformaciones.
Si en la ecuación 4.43 se reemplazan las deformaciones por desplazamientos, se podrá obtener
µX
ω=
4 i,j
∂ui
∂uj
+
∂Xj ∂Xi
2
+
λ X ∂ui ∂uj
2 i,j ∂Xi ∂Xj
λ
= µ ∇sim u : ∇sim u + (∇ · u)2
2
donde se observa que
ω
(4.45)
(4.46)
es función cuadrática de derivadas primeras de
desplazamientos.
4.4.2. Efectos Térmicos
Si hubiesen efectos térmicos, sería necesario tener presente que para
εii = 0 existe una tensión térmica σiio 6= 0, que puede ser evaluada según
la ley de Hooke como:
σiio = −
E
α∆T = − (2µ + 3λ) α∆T
1 − 2ν
(4.47)
es el coeciente de dilatación térmica del material, ∆T es el
E
cambio de temperatura y se ha usado la relación
= 2µ + 3λ.
1−2ν
o
Estas tensiones σii son iguales para todas las direcciones. En este
donde
caso,
α
ω
deberá contener los términos adicionales
X
i
σiio εii = −
E
α∆T (ε11 + ε22 + ε33 )
1 − 2ν
= − (2µ + 3λ) α∆T (ε11 + ε22 + ε33 )
1 o o 1
1
E
p ∆ = K∆o ∆o =
∆0 ∆0
2
2
2 3 (1 − 2ν)
3
E
3 (2µ + 3λ)
=
(α∆T )2 =
(α∆T )2
2 (1 − 2ν)
2
(4.48)
(4.49)
Introducción a la Teoría de Elasticidad
96
con lo que
ω
resulta
ω=
X
i,j
λ
µε2ij + ∆∆ − (2µ + 3λ) α∆T ∆
2
3 (2µ + 3λ)
(α∆T )2
2
2
X
G
K
−
3
∆∆ − K 3α∆T ∆
ω=G
ε2ij +
2
i,j
+
+
K
(3α∆T )2
2
(4.50)
(4.51)
(4.52)
La Figura 4.4 muestra la situación cuando hay efectos térmicos, en
una dimensión.
Figura 4.4: Energía interna cuando hay efectos térmicos
4.4.3. Energía de Distorsión
La energía de deformación para material elástico lineal expresada
en la ecuación 4.40 puede ser reescrita teniendo en cuenta la descomposición de los tensores de tensiones y deformaciones en sus componentes
esféricas y desviadoras. En efecto, siendo
σij = sij + δij p
∆
εij = eij + δij
3
(4.53)
(4.54)
Relaciones Constitutivas de un Material
la densidad de energía interna de deformación,
97
w,
resulta:
1X
1
ω=
(sij + δij p) eij + δij ∆
2 i,j
3
1
1
1X
sij eij + δij sij ∆ + δij peij + δij δij p∆
=
2 i,j
3
3
Pero
P
i,j
δij sij = 1 : s = trs = 0
y
P
i,j
δij eij = tre = 0,
(4.55)
luego
!
1 X
1
ω=
sij eij + p∆ = (s : e + p∆)
2 i,j
2
P
p2
s:s
p2
i,j sij sij
=
+
=
+
4G
2K
4G
2K
(4.56)
(4.57)
La primera componente es la energía de distorsión, mientras que
la segunda componente es la energía debida al cambio de volumen. Se
puede demostrar que la energía de distorsión se puede escribir en la
forma
ωd =
1 (σI − σII )2 + (σII − σIII )2 + (σIII − σI )2
12G
que se emplea en varios criterios de falla de materiales, como el criterio
de uencia de von Mises .
4.5. Materiales Visco-Elásticos∗
Muchos materiales tienen comportamiento que depende fuertemente del tiempo, de manera que parte de sus propiedades se asemejan a
las de un uido viscoso. En estos casos, el material combina respuestas de sólido elástico y también de uido viscoso.
Ejemplos de esos
materiales son plásticos, polímeros amorfos, alimentos, tejidos del pulmón humano, capas de hielo polar, goma natural no vulcanizada, bras
textiles, vidrio a temperatura de transición y otros.
Dentro de los modelos visco-elásticos existen algunos que son muy
sencillos y de gran importancia conceptual, que se discutirán a continuación.
Introducción a la Teoría de Elasticidad
98
4.5.1. Modelo de Kelvin
En este modelo se supone que un esfuerzo aplicado al material hace
que éste responda con sus propiedades elásticas y viscosas al mismo
tiempo. Una parte del esfuerzo produce una deformación elástica y
otra parte produce una deformación viscosa. La magnitud de cada
componente de deformación depende de los módulos elástico y viscoso
del sólido.
Para el caso uniaxial, la siguiente gura muestra el modelo mecánico
que representa al material de Kelvin formado por un pistón viscoso (de
C ) que trabajan en
paralelo. Por condición de equilibrio, la tensión total σ se transmite en
viscosidad
η)
y un resorte elástico (de elasticidad
parte al resorte y en parte al amortiguador:
σ = σe + σv
donde la tensión en el elemento elástico está dada por
σ e = Cε
y la tensión en el elemento viscoso se calcula como
σ v = η ε̇
donde
ε̇ = dε/dt.
Reemplazando en la condición de equilibrio se tiene
σ = Cε + η ε̇
que es la relación entre tensión, deformación y tiempo para estado
uniaxial.
Para establecer el comportamiento tridimensional de un material
visco-elástico se procede igual que en elasticidad, separando las componentes esféricas y desviadoras. Especícamente, hay evidencia que comprueba que prácticamente todos los materiales responden elásticamente
a cargas hidrostáticas moderadas, mientras que las características vis-
s = 2η ė. Usando la
1
deformación, ė = ε̇ − 1trε̇,
3
cosas se presentan en las componentes desviadoras
denición de componente desviadora de
resulta:
E
σ=
1+ν
ν
1
ε+
trε1 + 2η ε̇ − trε̇1
1 − 2ν
3
Relaciones Constitutivas de un Material
99
Figura 4.5: Modelo de Kelvin en una dimensión.
Esta es la ecuación constitutiva en tres dimensiones para un material
que se comporta como modelo de Kelvin y provee la tensión en función
de la deformación y de la tasa de deformación. La parte esférica solo
reacciona elásticamente, pero la desviadora tiene las dos componentes.
Al inicio, la parte viscosa no deja que la elástica desarrolle toda la
deformación que necesita y la tensión elástica no llega a su máximo.
Con el tiempo, la parte viscosa cede y queda actuando la elástica, que
frena la deformación de acuerdo a sus valores de módulos elásticos.
4.5.2. Modelo de Maxwell
En el modelo de Maxwell, la parte elástica y la viscosa actúan en
serie. Para el caso 3D, la relación de equilibrio es
σ = σe = σv
La deformación total es la suma de ambas componentes:
ε = εe + εv
Diferenciando con respecto al tiempo
ε̇ = ε̇e + ε̇v
Introducción a la Teoría de Elasticidad
100
donde la tasa elástica es
1+ν
ε̇ =
E
e
σ̇ e −
ν
e
trσ̇ 1
1+ν
s = 2η ė
1
1
v
v
v
ė =
σ − trσ 1
2η
3
La tasa viscosa se despeja de
Figura 4.6: Modelo de Maxwell en una dimensión.
Sumando ambas contribuciones se llega a
1+ν
ε̇ =
E
σ̇ −
ν
1
1
trσ̇1 +
σ − σ1
1+ν
2η
3
Nótese que en esta relación no aparece
ε
sino su tasa y depende del
tensor de tensiones y de su tasa. Si se aplica al material un esfuerzo
determinado, la gura muestra que éste responde primeramente con
sus propiedades elásticas para el tiempo inicial, pero posteriormente,
si se mantiene el esfuerzo, responde con sus propiedades viscosas.
Otros modelos combinan elementos en serie con elementos en paralelo, de modo de representar respuestas más complejas, como el modelo
de Burgers.
Relaciones Constitutivas de un Material
101
4.6. Materiales Elasto-Plásticos
4.6.1. Estado Uniaxial de Tensiones y Deformaciones, Tensión de uencia
Una característica fundamental de la plasticidad es la presencia de
deformaciones irrecuperables que quedan en el sólido aún después de
ser retiradas las cargas. El comportamiento plástico de los sólidos se
caracteriza por un relación entre tensiones y deformaciones que no es
única (al contrario de lo que sucede en materiales elásticos, sean estos
lineales o no lineales). Si se considera solamente el comportamiento
uniaxial de un material, una relación
σ−ε
no lineal en el proceso de
carga no determina si el comportamiento es de tipo plástico o no lineal
elástico. La descarga permitirá inmediatamente descubrir la diferencia, dado que el material elástico recorrerá el mismo camino de carga,
mientras que el plástico seguirá un camino diferente, que depende de
la historia de carga. Esta respuesta se ha ejemplicado en la gura
4.7. Allí se ve que el material se comporta en forma elástica hasta el
estado indicado por
A
y a partir de allí ya hay deformaciones plásti-
cas. La tensión correspondiente a
uencia.
A, indicada por σy , es la tensión
de
σ
Campo
Plástico
B
σy
A
Campo
Elástico
0
ε
p
εe
ε
Figura 4.7: Sólido elasto-plástico en una dimensión.
Muchos materiales tienen un comportamiento que para pequeñas
deformaciones plásticas se aproxima a un plástico ideal. En plasticidad
ideal existe una tensión de uencia
σy
para la que el estado de defor-
Introducción a la Teoría de Elasticidad
102
maciones se halla indeterminado. Para todas las tensiones inferiores a
la de uencia se supone una relación elástica
Para el estado indicado por
σ − ε.
B
en la gura 4.8, existirá una parte
e
de las deformaciones que permanece elástica ε11 y otra parte que será
p
plástica ε11 de modo que la deformación total ε11 será
ε11 = εe11 + εp11
σ
σy
A
B
E
E
1
0
(4.58)
1
ε
p
ε
ε
e
Figura 4.8: Sólido Elasto-plástico Ideal en una dimensión.
Para la parte elástica serán válidas las expresiones de la Sección
4.2.1, de modo que
εe11 =
σ11
E
Pero las relaciones constitutivas de la parte plástica no pueden ser
escritas directamente en términos de tensiones y deformaciones sino
que es necesario introducir incrementos diferenciales de deformación
ε11
y de tensión
σ11 .
El estado tensional elasto-plástico requiere la
integración de las ecuaciones diferenciales resultantes.
4.6.2. Estado Tridimensional de Tensiones y Deformaciones, Función de uencia
En lugar de estudiar en detalle el proceso progresivo de plasticación de un cuerpo sólido, en este texto introductorio nos limitaremos a
Relaciones Constitutivas de un Material
103
estudiar hasta qué estados tensionales son válidas las relaciones elásticas y cuál es el límite en el que se comienzan a plasticar las primeras
bras del sólido.
Cuando se estudia un estado tensional tridimensional, el concepto
de tensión de uencia ya no es suciente y es necesario denir una
función de uencia que determine que combinación de las componentes
de tensión produce la uencia del material. Una función de ese tipo
puede escribirse de la forma
f (σ) − cy = 0
donde
cy
o
f (σ, cy ) = 0
(4.59)
es una constante (o más de una) que depende del material.
En general ésta u otras constantes se determinan en base a ensayos
sencillos donde todo el espécimen está bajo el mismo estado tensional
y donde la terna de direcciones principales no cambia durante todo el
ensayo. Los más utilizados son el ensayo de tracción simple en metales
o el de compresión simple y triaxial en materiales que resisten principalmente compresión. En materiales isótropos, en lugar de escribir
la ecuación 4.59 en función de las seis componentes cartesianas del
tensor
σij
resulta más conveniente hacerlo en función de las tensiones
principales u otros invariantes, de modo que
f (σI , σII , σIII , cy ) = f (I1 , I2 , I3 , cy ) = 0
(4.60)
Existen varios criterios para establecer un límite al comportamiento
elástico del material, y cualquiera de estos criterios gracado en el espacio de tensiones principales da lugar a una supercie de uencia. Los
puntos interiores a la supercie denen los posibles estados elásticos
que puede alcanzar el material. Los puntos ubicados sobre la supercie representan el límite del comportamiento puramente elástico y el
comienzo de un comportamiento elasto-plástico. Estados tensionales
exteriores a la supercie no son posibles en plasticidad ideal.
En general, esos criterios dependen del material de que se trate.
En algunos de ellos, por ejemplo el acero, la condición de plasticidad
no depende de las componentes hidrostáticas o esféricas de tensión y
deformación, sino fundamentalmente de las componentes desviadoras;
en materiales como suelos, por el contrario, la condición de plasticidad
sí depende de la presión hidrostática (que es el nivel de connamiento
del suelo). Veremos algunos criterios que son de utilidad en la representación de la plasticidad de algunos materiales.
Introducción a la Teoría de Elasticidad
104
4.6.3. Criterio de Fluencia de Rankine
El criterio de Rankine dice que en un estado tridimensional de
tensiones se llega a uencia cuando una tensión principal de tracción
se hace igual a la tensión de uencia uniaxial.
Las expresiones que resumen este criterio pueden escribirse como
σI − σy = 0
σII − σy = 0
σIII − σy = 0
(4.61)
Cada una de las tres ecuaciones 4.61 dene un plano en el espacio de
tensiones principales, paralelo a un plano coordenado delimitando un
prisma de tres caras que contiene los posibles estados elásticos del
material. Este criterio se adapta a representar metales frágiles que
fallan por tracción, como fundición y es usado aún en la actualidad a
pesar de haber sido formulado a mediados del siglo XIX. Este criterio
puede ser adaptado para materiales que fallan también por compresión
independientemente de los otros valores de tensiones principales. En tal
caso y asumiendo que las tensiones de uencia en compresión y tracción
son las mismas, la supercie de uencia queda descripta por un cubo
centrado en el origen como se muestra en la gura 4.9.
σΙΙΙ
σΙΙ
σy
σy
0
σy
σy
σy σΙ
σΙΙ
0
σΙ
Figura 4.9: Supercie de Fluencia de Rankine.
Relaciones Constitutivas de un Material
105
4.6.4. Criterio de Fluencia de Tresca
El Criterio de Tresca dice que una partícula de un sólido en estado
tridimensional de tensiones se plastica cuando el corte máximo alcanza la máxima tensión de corte a que se llega en un estado uniaxial que
alcanza uencia.
Como se vio en el análisis general de tensiones al considerar círculos
máx
de Mohr, en el entorno de un punto la máxima tensión cortante σνs
puede expresarse en función de las tensiones principales como
1
máx
σνs
= ± (σI − σIII )
2
1
máx
σνs
= ± (σII − σIII )
2
(4.62)
1
máx
σνs
= ± (σI − σII )
2
En un estado uniaxial se tiene
σII = σIII = 0
1
máx
σνs
= ± σI
2
(4.63)
Cuando el estado uniaxial alcanza uencia entonces se verica que
σI = σy
de modo que
1
máx
σνs
= ± σy
2
(4.64)
Igualando las ecuaciones 4.64 y 4.62 se tendrá
σI − σIII = ±σy
σII − σIII = ±σy
σI − σII = ±σy
(4.65)
Introducción a la Teoría de Elasticidad
106
Cada una de las seis ecuaciones 4.65 dene un plano en el espacio de
tensiones principales, que limitan una supercie cilíndrica de sección
hexagonal mostrada en la gura 4.10.a cuyo eje es el eje hidrostático.
La intersección del cilindro con el plano desviador se muestra en la
gura 4.10.b. Nótese que un estado hidrostático, dado por
σI = σII = σIII
(4.66)
nunca alcanzará uencia según este criterio. Lo mismo es válido para
el criterio de von Mises que se verá a continuación. Ambos criterios se
emplean en la actualidad en modelos de metales dúctiles, en particular
acero.
Un problema en el cual una de las tensiones principales es cero,
por ejemplo
σIII = 0, se denomina problema de tensión plana. En este
σI σII y resulta
caso es posible gracar el criterio de Tresca en el plano
un hexágono, como se muestra en la gura 4.10.c. Este hexágono es
sencillamente la intersección de la supercie tridimensional de Tresca
(prisma hexagonal) con el correspondiente plano coordenado.
Las hipótesis de este criterio fueron inicialmente propuestos por
Coulomb en 1773 y Tresca lo desarrolló en 1868.
4.6.5. Criterio de Fluencia de von Mises
En el criterio de von Mises se considera que un estado tridimensional alcanza uencia cuando se llega al valor de la energía de distorsión
igual al de la energía de distorsión en un estado uniaxial de uencia.
Como se verá en el Capítulo 6, la energía de distorsión resulta
1 1
(σI − σII )2 + (σI − σIII )2 + (σII − σIII )2
wd = s : e =
2
12G
−J2
(4.67)
=
2G
Para un estado uniaxial,
σII = σIII = 0
y la ecuación 4.67 se reduce a
wd =
σI2
6G
Relaciones Constitutivas de un Material
σΙΙΙ
f4
f5
107
Eje Hidrostático
σ 1 = σ2 = σ3
f3
von Mises
σΙΙ
f6
Intersección con
Plano desviador
σΙ
f1
f2
(a)
σΙΙΙ
von Mises
f5
σy
√3/2
σy
f2
f2
σΙΙ
f1
f3
−σy
f3
f1
(b)
R=
f4
f6
σΙ
σΙΙ
f6
f4
f5
Intersección con
Plano desviador
σy
σΙ
−σy
(c)
Figura 4.10: Supercies de Fluencia de Tresca y von Mises (a, b) en
tres dimensiones; (c) en dos dimensiones.
Cuando ese estado uniaxial alcanza uencia, se tiene
σI = σy
wd =
σy2
6G
(4.68)
Igualando las ecuaciones 4.67 y 4.68 se llega a
(σI − σII )2 + (σI − σIII )2 + (σII − σIII )2 = 2σy2 = −6J2
(4.69)
que determina un cilindro de sección circular en el espacio de tensiones
principales. Como se muestra en la gura 4.10.a, el criterio de von
Introducción a la Teoría de Elasticidad
108
Mises determina una supercie en la que queda inscripta la supercie
de Tresca.
Observar en la ecuación 4.69 que es suciente evaluar
J2
para de-
terminar si el estado tensional es elástico. Estados tensionales en los
que
(σI − σII )2 + (σI − σIII )2 + (σII − σIII )2 = −6J2 < 2σy2
son elásticos de acuerdo con el criterio de von Mises.
En un estado tensional plano, en el que
σIII = 0,
uencia de von Mises delimita una elipse en el plano
el criterio de
σI σII ,
como
se muestra en la gura 4.10.c. El criterio de von Mises no permite
especicar cuál es el plano de falla en un caso concreto.
4.6.6. Criterio de Fluencia de Mohr-Coulomb
En el criterio de Mohr-Coulomb se considera que en un estado tridimensional de tensiones se llega a uencia cuando la tensión cortante
alcanza el valor denido por la ecuación
σνs = c − σνν
tg ϕ
(4.70)
La ecuación 4.70, escrita por Coulomb en 1775, depende de dos
parámetros de uencia: la cohesión o resistencia intrínseca al corte,
y el ángulo de fricción interna,
c;
ϕ.
Con referencia a la gura 4.11, las componentes cortante y normal
de tensión resultan
σνs =
σνν =
1
(σI − σIII ) cos ϕ
2
1
1
(σI + σIII ) + (σI − σIII ) sen ϕ
2
2
Notar que se ha gracado la parte negativa del eje
(4.71)
σνν
hacia la
derecha como es habitual en mecánica de suelos.
Reemplazando las 4.71 en la 4.70 se obtiene la condición
−c cos ϕ +
1
1
(σI + σIII ) sen ϕ + (σI − σIII ) = 0
2
2
(4.72)
Esta ecuación puede escribirse alternativamente como
σIII =
1 + sen ϕ
2 cos ϕ
σI −
c
1 − sen ϕ
1 − sen ϕ
(4.73)
Relaciones Constitutivas de un Material
109
σνs
φ
tan φ
σ
ν
ν
σ ν s=c
c
c cot φ
σΙ
σΙΙΙ
−σνν
Figura 4.11: Criterio de Mohr-Coulomb en tres dimensiones.
o en términos de la máxima tensión de corte en el punto
σI − σIII
c cos ϕ − σI sen ϕ
=
1 − sen ϕ
2
Para las otras posibilidades de tensiones principales máximas y mínimas, se llega a
(c cos ϕ − σI sen ϕ) 1
+ (σI − σIII ) = 0
σIII < σII < σI
1 − sen ϕ
2
(c cos ϕ − σIII sen ϕ) 1
+ (σIII − σI ) = 0
σI < σII < σIII
=−
1 − sen ϕ
2
(c cos ϕ − σII sen ϕ) 1
=−
+ (σII − σI ) = 0
σI < σIII < σII
1 − sen ϕ
2
(c cos ϕ − σI sen ϕ) 1
+ (σI − σII ) = 0
σII < σIII < σI
=−
1 − sen ϕ
2
(c cos ϕ − σII sen ϕ) 1
=−
+ (σII − σIII ) = 0
σIII < σI < σII
1 − sen ϕ
2
(c cos ϕ − σIII senϕ) 1
=−
+ (σIII − σII ) = 0
σII < σI < σIII
1 − senϕ
2
f1 = −
f2
f3
f4
f5
f6
(4.74)
Un estado tridimensional es elástico de acuerdo con el criterio de
Mohr-Coulomb si por ejemplo (de la primera de las ecuaciones)
1
(c cos ϕ − σI sen ϕ)
(σI − σIII ) <
2
1 − sen ϕ
Introducción a la Teoría de Elasticidad
110
y se verican desigualdades similares para el resto de las ecuaciones
4.74, es decir que todas las
fi < 0.
En las ecuaciones 4.74 se observa que la condición de plasticidad
está determinada por dos parámetros (c y
ϕ)
en lugar de emplearse
uno como en los criterios anteriores (que sólo dependían de
σy ).
El
criterio de Mohr-Coulomb conduce a un cono de sección hexagonal (no
regular, sino deformado), donde cada cara del prisma responde a cada
una de la
fi
y en el que el vértice se encuentra sobre el eje hidrostático.
Reemplazando las 4.66 en las 4.74 se obtienen las coordenadas del
vértice como
σI = σII = σIII = −c cot ϕ
(4.75)
Este criterio se emplea en materiales que presentan un distinto comportamiento en tracción y compresión. Bajo tracciones, en hormigones
y suelos se alcanza un estado hidrostático que produce la falla del material.
Nótese que si en las 4.74 hacemos
ϕ=0
1
c = σy
2
(4.76)
se obtienen las ecuaciones 4.65. De modo que el criterio de Tresca es
un caso particular del criterio de Mohr-Coulomb.
f5
f4
−σΙΙΙ
Eje Hidrostático
σ 1 = σ2 = σ3
f3
f6
Intersección con
Plano desviador
−σΙ
f2
−σΙΙ
f1
√ 3 c cot φ
Figura 4.12: Supercies de uencia de Mohr-Coulomb
4.6.6.1. Criterio de Mohr-Coulomb en Hormigón
Los parámetros
c y ϕ del material
deben ser determinados a través
de ensayos. Si el material es un suelo, estos parámetros surgen direc-
Relaciones Constitutivas de un Material
111
tamente de la envolvente de la resistencia al corte que se obtiene con
ensayos triaxiales. Para materiales como el hormigón, los parámetros
c
y
ϕ
se obtienen en función de ensayos que miden la resistencia a la
compresión simple (σc ) y la resistencia a la tracción (σt ) a través de
las siguientes expresiones (ver Figuras 4.13.a y 4.13.b). Aplicando 4.73
a ambos casos se tiene (con
σc
el valor absoluto de la resistencia a la
compresión)
0=
2 cos ϕ
1 + sin ϕ
σt −
c
1 − sin ϕ
1 − sin ϕ
2 cos ϕ
−σc = −
c
1 − sin ϕ
restando ambas expresiones desaparece la cohesión y despejando
sin ϕ =
Una vez determinado
ϕ
σc − σt
σc + σt
sin ϕ
la cohesión resulta:
c = σc
1 − sin ϕ
2 cos ϕ
En la Figura 4.13.b se ilustra la intersección de la supercie de falla con el plano
σIII = 0,
en la que se pone en evidencia que, para el
caso del hormigón, la transición lineal entre
y que basta que
σI
(o que
σII )
σc
y
σt
es muy empinada,
sea de tracción para que se reduzca
muy marcadamente la resistencia a la compresión en la dirección
(o viceversa para el caso que
σII
σII
sea de tracción). También se puede
apreciar que los materiales cuyas resistencias a tracción y compresión
uniaxial son iguales (metales dúctiles, por ejemplo), el ángulo de fricción
ϕ resulta igual a cero. Según se puede deducir del círculo de Mohr
de la Figura 4.13.a, el plano de falla para el estado de compresión simple está representado por el punto
C.
Dicho punto corresponde a un
plano de falla que forma con el eje de máxima compresión principal un
◦
ángulo igual a (45 − ϕ/2).
Una característica general de interés práctico de los materiales en
los que es aplicable el criterio de Mohr-Coulomb, es que la resistencia
a la compresión en la dirección principal de máxima tensión de compresión puede resultar mucho mayor que la resistencia a la compresión
simple.
Introducción a la Teoría de Elasticidad
112
(a)
(b)
Figura 4.13: Supercie de uencia de Mohr-Coulomb para hormigones.
(a) Envolvente de corte, (b) Intersección con el plano
σIII = 0
A manera de ejemplo, para un hormigón sometido a tensiones de
σIII = σII = p igual a solo al 5 % de σI ,
la resistencia a compresión según σI resulta aproximadamente 1,5 veces
connamiento (de compresión)
la resistencia a compresión simple. Esta característica es la que justica
que la resistencia al aplastamiento bajo cargas exteriores limitadas a
una fracción de la supercie plana de una masa de hormigón (como
en apoyos de máquinas o insertos metálicos) sea considerablemente
superior a la resistencia a la compresión connada, a diferencia de lo
que ocurre en materiales dúctiles (ϕ
= 0),
en los cuales esos mismos
valores de tensiones de connamiento solo producirían un incremento
de la tensión de uencia en el orden del 5 % de la tensión de uencia
uniaxial, en contraste con el 50 % arriba indicado para el hormigón.
Relaciones Constitutivas de un Material
113
4.6.7. Criterio de Fluencia de Drucker-Prager
El criterio de Drucker-Prager, formulado en 1952, puede considerarse como una generalización del criterio de von-Mises, en el que se
considera la dependencia del connamiento en la tensión desviadora de
uencia. La ecuación de la supercie de uencia en este criterio está
dada por:
α I1 +
p
−J2 = κ
(4.77)
Esta ecuación puede también considerarse una generalización del criterio de Mohr-Coulomb, en donde se considera una medida general del
√
corte a través de la tensión desviadora (
−J2 ),
y una medida gene-
ral del connamiento a través de la tensión media (3σM
= I1 ).
Cabe
destacar que en el espacio de tensiones principales la tensión media
está relacionada con la coordenada sobre el eje hidrostático, mientras
que la cordenada sobre el plano desviador es proporcional a
√
−J2 .
De esta manera, este criterio dene una supercie de forma cónica de
sección circular. En la gura 4.14 se muestra la intersección de dicha
supercie con el plano desviador y con el plano
tros
α
y
κ
σIII = 0.
Los paráme-
son análogos al ángulo de fricción y cohesión del criterio de
Mohr-Coulomb. Se observa que si
α=0
se obtiene el criterio de von
Mises.
Intersección con
Plano desviador
f6
σΙΙΙ
f2
f4
σΙ
+σΙΙ
Drucker
Prager
f3
f1
f5
σΙΙ
f5
f3
f1
+σΙ
f4
f2
f6
Drucker
Prager
Figura 4.14: Supercies de uencia de Mohr-Coulomb y DruckerPrager (a) en tres dimensiones, (b) en dos dimensiones.
Introducción a la Teoría de Elasticidad
114
Dado que los materiales cuyo comportamiento depende del connamiento (por ejemplo, hormigón o suelos) frecuentemente se caracterizan
a través de los parámetros del criterio de Mohr Coulomb (cohesión y
fricción), puede resultar de interés ajustar el criterio de Drucker-Prager
la supercie de uencia resultante del criterio de Mohr-Coulomb. Dado
que la sección de estas supercies no tienen la misma forma (hexágono
irregular vs. círculo), el ajuste puede realizarse de diversas maneras.
Por ejemplo, puede ajustarse el criterio de Drucker-Prager de manera
que se obtenga la misma resistencia a la compresión que utilizando
Mohr-Coulomb:
sen ϕ
2
α= √
3 3 − sen ϕ
(4.78)
6c
cos ϕ
κ= √
3 3 − sen ϕ
Otra alternativa es realizar un ajuste a la tracción, donde resulta:
2
sen ϕ
α= √
3 3 + sen ϕ
(4.79)
6c
cos ϕ
κ= √
3 3 + sen ϕ
Para estados de deformación plana, se puede realizar un ajuste que
obtenga la misma carga límite (Chen y Saleeb, 1982):
α= p
tan ϕ
9 + 12 tan2 (ϕ)
(4.80)
κ= p
3c
9 + 12 tan2 (ϕ)
4.6.8. Teorías de Plasticidad
Una vez que el material ha alcanzado la supercie de uencia en
alguna partícula del cuerpo, las ecuaciones de la elasticidad ya no serán válidas en todo el cuerpo y se requiere integrar las correspondientes
Relaciones Constitutivas de un Material
115
ecuaciones diferenciales para poder considerar la existencia de deformaciones plásticas. Su tratamiento escapa al alcance de este texto introductorio y el lector interesado deberá consultar textos más avanzados
de mecánica de los sólidos o algún tratado sobre teoría de Plasticidad.
4.7. Ejercicios
Ejercicio 4.1.
En un punto de una estructura, el tensor lineal de
ε11 = 0,001;
ε22 = 0,002; ε33 = 0,006; ε12 = 0,003; ε13 = 0,004; ε32 = 0,005.
deformaciones se ha medido en laboratorio y resultan
Evaluar las componentes del tensor de tensiones teniendo en cuenta
que
E = 200GP a
y
ν = 0,3.
Ejercicio 4.2. En un punto de una estructura, el tensor de tensio-
nes se ha computado como
100 70 90
240 130 M P a
σ=
250
siendo
E = 200GP a
y
ν = 0,3.
Demuestre numéricamente que las
direcciones principales de tensión coinciden con las de deformación.
Ejercicio 4.3. Calcule los invariantes del tensor de deformaciones
en función de los invariantes del tensor de tensiones.
Solución: Los invariantes de un tensor se pueden calcular en fun-
ción de los invariantes del otro tensor usando las relaciones elásticas
lineales. Operando, resultan:
ν 2
1 − 2ν σ
I1
I2ε = [3 − 4 (1 + ν)]
(I1σ )2
E
E
3 1+ν
ν2
ν
ε
σ
σ 3
σ σ
I3 =
I3 +
(I1 ) −
I I
E
1+ν 1 2
(1 + ν)3
I1ε =
Ejercicio 4.4.
Estado plano de tensiones. A partir del tensor de
tensiones que se indica, teniendo en cuenta que se trata de un material caracterizado por las constantes elásticas
y
ν
E
(módulo de Young)
(relación de Poisson) determinar las componentes del tensor de
deformaciones. Establecer una expresión que relacione a ambos para
i, j = 1, 2
σ11 σ12 0
σij = σ21 σ22 0 ;
0
0
0
σi3 = 0
Introducción a la Teoría de Elasticidad
116
Ejercicio 4.5. Estado plano de deformaciones. A partir del tensor
de deformaciones que se indica, teniendo en cuenta que se trata de un
material caracterizado por las constantes elástica
y
ν
E (módulo de Young)
(relación de Poisson), determinar las componentes del tensor de
tensiones. Establecer una expresión que relacione a ambos para
i, j =
1, 2
ε11 ε12 0
εij = ε21 ε22 0 ;
0
0
0
εi3 = 0
Ejercicio 4.6.
En un estado plano de tensiones se han encontra−6
do los valores de σ11 = 20M P a; σ22 = 25M P a; ε11 = 214 × 10 ;
−6
ε22 = 300 × 10 . Calcule cuánto valen los módulos de elasticidad y de
Poisson.
Ejercicio 4.7.
Se tiene un cilindro connado lateralmente como
se indica en la gura 4.15 y bajo la acción de una carga
actuando en la dirección
p1 = 70kP a
X1 . Se pide determinar el estado de esfuerzos
y deformaciones en el interior.
Figura 4.15: Cilindro connado lateralmente del Ejercicio 4.7
Ejercicio 4.8. El cubo de acero de la gura 4.16 tiene 12,7mm de
p1 = 600M P a
en dos de
sus caras. Las otras cuatro caras pueden desplazarse hasta
0,381mm
lado y está sometido a una presión uniforme
y si el cubo alcanza ese desplazamiento estará connado a partir de
esa carga. (a) Encuentre la presión para la que el cubo se desplaza
0,381mm.
(b) Encuentre la presión que el cubo ejercerá nalmente
sobre el connamiento.
Relaciones Constitutivas de un Material
Solución:
117
Este problema es de tipo no-holónomo, dado que las
condiciones de contorno cambian durante el proceso de deformación.
(a) Mientras el cubo no toca el connamiento, el estado está representado por
σ11 0 0
0 0 ;
σij = 0
0
0 0
donde
ε11 0
0
ε22 0
εij = 0
0
0
ε33
σ11 = −p, ε22 = ε33 = 0,0006.
Las ecuaciones constitutivas
elásticas son
E
[(1 − ν) ε11 + 2 × 0,0006ν]
(1 + ν) (1 − 2ν)
E
0=
[0,0006 + νε11 ]
(1 + ν) (1 − 2ν)
σ11 =
De la segunda ecuación,
ε11 = 0,0006/ν . De la primera ecuación, σ11 =
420M P a.
(b) A partir del momento en que el material toca el connamiento,
los tensores pasan a tener la forma
∆σ11 0
0
σ22 0 ;
σij = 0
0
0
σ22
donde
∆ε11 0 0
0 0
εij = 0
0
0 0
∆σ11 = σ11 − (−420M P a); ∆ε11 = ε11 − 0,002. Para la carp1 = 600M P a se tiene ∆σ11 = 180M P a. Las ecuaciones
ga nal de
constitutivas resultan
∆σ11 = 180M P a =
E (1 − ν)
∆ε11
(1 + ν) (1 − 2ν)
∆ε11 = −0,000637
Eν
σ22 =
∆ε11
(1 + ν) (1 − 2ν)
de donde
de donde
Cuando la carga alcanza el valor máximo de
σ22 = −77M P a
p1 = 600M P a, los tensores
resultan
−600 0
0
MP a ;
−77 0
σij = 0
0
0
−77
−26,37 0 0
6 0 10−4
εij = 0
0
0 6
Introducción a la Teoría de Elasticidad
118
Figura 4.16: Cubo connado sometido a presión, Ejercicio 4.8
Ejercicio 4.9.
Dado el cuerpo libre de restricciones de desplaza-
miento en un espacio tridimensional, como se indica en la gura 4.17,
sometido al campo de salto térmico que también se indica, determinar: (a) si para todo punto del mismo se satisfacen las ecuaciones de
compatibilidad. (b) para un estado de coacción interno tal que haga,
para todo punto del cuerpo,
εij ≡ 0
(idénticamente nulo), las fuerzas
másicas y de contorno que equilibren a las tensiones que dicho estado
provoca.
Figura 4.17:
Cuerpo sometido a un campo térmico, Ejercicio 4.9.
Ejercicio 4.10.
dades
Un cilindro de material visco-elástico de propie-
E = 50KP a, η = 1000KP a.s, ν = 0,12,
se encuentra connado
lateralmente y cargado axialmente. El material se comporta como un
p = 1KP a, calcule la deformación
axial a tiempo inicial, a t = 30s y t = 200s. Calcule las tensiones sobre
modelo de Kelvin. Para una presión
las paredes del connamiento a los mismos tiempos.
Solución: Suponemos que la dirección axial es x1 , con lo que ε12 =
Relaciones Constitutivas de un Material
ε13 = ε23 = 0
119
y debido al connamiento,
ε22 = ε33 = 0.
Se supone
que los materiales responden elásticamente ante cargas hidrostáticas
moderadas, de modo que
σmm = 3Kεmm ,
σ11 + 2σ22 =
que en este caso resulta en
E
ε11
1−ν
La deformación elástica instantánea es
ε11 =
(1 + ν) (1 − 2ν) p
(1 − ν)
E
Por condición de equilibrio,
σ11 = −p. Las ecuaciones constitutivas
de Kelvin se reducen a
(1 − ν) E
ε11 +
(1 + ν) (1 − 2ν)
νE
=
ε11 −
(1 + ν) (1 − 2ν)
−p =
σ22
La ecuación diferencial de
σ11
4
η ε̇11
3
2
η ε̇11
3
es de la forma
dε11
+ Bε11 + G = 0
dt
donde
B=
3E
(1 − ν)
1
= 0,0388
4η (1 + ν) (1 − 2ν)
s
G=
3p
1
= 75 × 10−5
4η
s
Para integrar la ecuación se emplea separación de variables
ˆ
−
dε11
=
Bε11 + G
ˆ
dt
Integrando, resulta
− ln(Bε11 + G) = B (t + C)
donde
C
es la constante de integración. Exponenciando ambos miem-
bros de la ecuación se tiene
Bε11 + G = e−Bt e−BC
Introducción a la Teoría de Elasticidad
120
Para calcular
C
hay que jar condiciones iniciales. Para
Sustituyendo,
C=−
t = 0, ε011 = 0.
1
ln(G) = 185,60s
B
La deformación axial resulta
ε11 (t) =
1 −Bt −BC
e e
− G = 0,0194(e−0,0387t − 1)
B
t = 30s,
ε11 = −0,0133; para t = 200s, ε11 = −0,0193. Quiere decir que para
un tiempo de 200s ya se alcanzó la deformación elástica que tendría el
La deformación crece según una función exponencial. Para
material.
Ejercicio 4.11. Para el cilindro de material visco-elástico del pro-
blema anterior, encuentre las deformaciones suponiendo que no existe
connamiento lateral.
Ejercicio 4.12.
en sentido
El cubo de la gura 4.18 se encuentra connado
X3 y libre en los otros sentidos. Bajo la acción de una carga
σ11 en sentido X1 . Se supone un material elasto-plástico
se tensiona
perfecto.(a) Usando el criterio de uencia de von Mises, determinar el
estado de tensiones y deformaciones en el momento de producirse la
uencia. (b) Encuentre el punto de uencia en la elipse de von Mises.
Figura 4.18: Cubo connado en dirección x3 y libre en la otras dos,
Problema 4.12.
Capítulo 5
Técnicas de Solución
En capítulos anteriores se estudió que las tensiones, deformaciones
y desplazamientos en cada punto de un sólido deben satisfacer ecuaciones de equilibrio, cinemáticas y constitutivas, que se expresan por
medio de 15 incógnitas. Hay métodos generales de agrupar esas ecuaciones, aquí veremos el llamado Método de los Desplazamientos donde
se llega a tres ecuaciones diferenciales de equilibrio con las tres componentes de desplazamiento como incógnitas. Además veremos una forma
alternativa de plantear esta ecuación a través de una expresión integral
que se conoce en el campo de la mecánica como Principio de Trabajos
Virtuales y es más amena para su solución por técnicas numéricas.
Adicionalmente se discuten algunas aproximaciones a problemas especiales de elasticidad. Al nal del capítulo se introduce una notación
que facilita el tratamiento numérico de la elasticidad.
5.1. Ecuaciones Generales de la
Elasticidad Lineal
La mecánica del continuo trata con tres clases distintas de variables:
tensiones, deformaciones y desplazamientos. Las tensiones describen
esfuerzos que actúan en el interior de un cuerpo; las deformaciones
describen distorsiones locales; y los desplazamientos describen el movimiento de un punto durante el proceso de deformación con referencia
a un sistema de coordenadas jo. Las tensiones, deformaciones y desplazamientos se relacionan entre sí a través de tres grupos de ecuaciones
según se vio en los capítulos anteriores:
121
Introducción a la Teoría de Elasticidad
122
(a)
Las ecuaciones de equilibrio se escriben para un elemento
innitesimal del volumen. Son relaciones que contienen las tensiones
y las fuerzas por unidad de volumen (ρb
unidad de volumen,
ρ
=F
es la fuerza másica por
es la densidad de masa,
b
es la fuerza másica
por unidad de masa):
3
X
∂σij
+ Fj = 0
(5.1)
∇ · σ + F (X) = 0
(5.2)
i=1
∂Xi
o escrita en forma vectorial
donde
∂
∂
∂
,
,
∂X1 ∂X2 ∂X3
σ
σ11 σ12 σ13
F1
σ21 σ22 σ23 + F2 = 0
σ31 σ32 σ33
F3
(5.3)
es el tensor de tensiones de Cauchy que es simétrico. Estas
son ecuaciones de origen físico. La expresión anterior lleva implícita la
hipótesis de pequeños desplazamientos, ya que las derivadas se realizan
respecto a las posiciones de los puntos en la geometría indeformada
(Xi ).
(b)
Las ecuaciones cinemáticas
relacionan deformaciones con
desplazamientos. Dado que la deformación de un cuerpo se puede evaluar si se conocen los desplazamientos de cada punto del mismo, es
posible calcular las deformaciones especícas partiendo de componentes de desplazamiento. Para pequeñas deformaciones y pequeños giros,
esa relación puede escribirse como
1
εij =
2
∂ui
∂uj
+
∂Xj ∂Xi
(5.4)
o en forma vectorial
ε = ∇sim u =
1
∇u + ∇T u
2
(5.5)
Estas son ecuaciones de origen geométrico.
(c)
Las ecuaciones constitutivas relacionan tensiones con defor-
maciones. Para un material elástico lineal e isótropo resultan:
σ = 2µε + λ∆1
(5.6)
Técnicas de Solución
123
donde las constantes de Lamé se denen como
E
2(1 + ν)
µ=G=
λ=
(5.7)
νE
(1 + ν)(1 − 2ν)
(5.8)
que puede escribirse con mayor generalidad como
σ=C:ε
X
σij =
Cijkl εkl
(5.9)
k,l
Estas son ecuaciones de origen experimental.
(d) Las ecuaciones de compatibilidad.
Como hay más rela-
ciones cinemáticas que componentes de desplazamiento, se pueden eliminar los desplazamientos y llegar a ecuaciones que sólo contengan
deformaciones. Esas constituyen las ecuaciones de compatibilidad, que
se escriben en la forma:
∂ 2 ε11
∂X22
∂ 2 ε11
∂X32
∂ 2 ε22
∂X32
∂ 2 ε12
∂ 2 ε13
+
∂X1 ∂X3 ∂X1 ∂X2
∂ 2 ε31
∂ 2 ε32
+
∂X2 ∂X3 ∂X1 ∂X3
∂ 2 ε32
∂ 2 ε21
+
∂X1 ∂X2 ∂X2 ∂X3
+
+
+
−
−
−
∂ 2 ε22
∂X12
∂ 2 ε33
∂X12
∂ 2 ε33
∂X22
∂ 2 ε23
∂X12
∂ 2 ε12
∂X32
∂ 2 ε31
∂X22
∂ 2 ε12
∂X1 ∂X2
∂ 2 ε13
=2
∂X1 ∂X3
∂ 2 ε23
=2
∂X1 ∂X3
∂ 2 ε11
=
∂X2 ∂X3
∂ 2 ε33
=
∂X1 ∂X2
∂ 2 ε22
=
∂X1 ∂X3
=2
(5.10)
Resumiendo, la Tabla 5.1 muestra el número de ecuaciones de cada
tipo y las variables de cada una de ellas. Nótese que hay 15 incógnitas:
seis
σij ,
seis
εij ,
y tres
ui ,
mientras que empleando las ecuaciones de
equilibrio, constitutivas y cinemáticas se tienen 15 ecuaciones. Por lo
tanto, el problema queda perfectamente determinado a través de 15
ecuaciones con 15 incógnitas.
Introducción a la Teoría de Elasticidad
124
Ecuaciones
Número
Variables
Equilibrio
3
Constitutivas
6
Cinemáticas
6
Compatibilidad
6
6σij
6σij , 6εij
3ui , 6εij
6εij
Cuadro 5.1: Ecuaciones que gobiernan la elasticidad
Existen métodos generales que permiten reducir las ecuaciones a
formas más compactas y tratables para su resolución. Los dos procedimientos generales clásicos en el análisis de cuerpos elásticos deformables (también aplicables a conguraciones estructurales como pórticos,
reticulados, láminas delgadas, etc.), son:
1. Método de los desplazamientos, o de rigidez, o de equilibrio.
2. Método de las tensiones, o de las fuerzas, o de compatibilidad.
Se estudiará a continuación el primero de los métodos para el análisis
tridimensional de tensiones y deformaciones.
5.2. Método de los Desplazamientos,
Ecuaciones de Navier
Se parte de las tres ecuaciones de equilibrio fuerzas. En ellas se reemplazan las tensiones
σij
por las deformaciones
εij
usando las cons-
titutivas. Se tienen así tres ecuaciones de equilibrio que incluyen
y seis incógnitas
εij .
por desplazamientos
Fi
A continuación se reemplazan las deformaciones
ui
usando las cinemáticas. Quedan tres ecuacio-
nes de equilibrio en función de tres componentes de desplazamiento
(incógnitas) y tres componentes de fuerzas másicas
Fi
ui
(datos).
Veamos el desarrollo en más detalle para un elemento de volumen:
partimos de las ecuaciones de equilibrio
3
X
∂σij
i=1
+ Fj = 0
(5.11)
∇·σ+F=0
(5.12)
∂Xi
Técnicas de Solución
125
NAVIER
Desplazamientos
u
µ∇2+(λ+µ)∇(∇•u)+F=0
Cinemáticas
Fuerzas
F
Equilibrio
∇•σ+F=0
ε=½(∇ u+∇u)
T
Deformaciones
ε
Constitutivas
Tensiones
σ
Figura 5.1: Variables de la teoría de la elasticidad
Como
σij = 2µεij + λδij ∆
σ = 2µε + λ∆1
(5.13)
(5.14)
reemplazamos 5.13 en 5.11 y, suponiendo que el material es homogéneo
(las constantes elásticas del material no cambian de un punto a otro),
tenemos
2µ
3
X
∂εij
3
X
∂∆
+ Fj = 0
∂Xi
(5.15)
2µ∇ · ε + λ∇ · (trε1) + F = 0
(5.16)
i=1
∂Xi
+
i=1
λδij
A continuación usaremos las cinemáticas
1 ∂ui
∂uj
εij =
+
2 ∂Xj ∂Xi
1
ε=
∇u + ∇T u
2
(5.17)
(5.18)
Introducción a la Teoría de Elasticidad
126
con lo cual las ecuaciones 5.15 de equilibrio quedan en la forma:
3
X
"
i=1
∂ 2 uj
∂
µ
+µ
∂Xi ∂Xi
∂Xi
∂ui
∂Xj
∂
+ δij λ
∂Xi
3
X
∂um
∂Xm
m=1
!#
+ Fj = 0
(5.19)
T
µ∇ · ∇u + ∇ u + λ∇ · [(∇ · u) 1] + F = 0
(5.20)
Reagrupando se llega a tres ecuaciones escalares
3
X
∂
∂ 2 uj
+ (µ + λ)
µ
∂Xi ∂Xi
∂Xj
i=1
3
X
∂um
∂Xm
m=1
!
+ Fj = 0
(5.21)
En forma vectorial, las 5.21 pueden expresarse como
µ div (grad u) + (µ + λ) grad (div u) + F = 0
µ ∇ · ∇u + (µ + λ) ∇ (∇ · u) + F = 0
que se deben satisfacer en el dominio
V
(5.22)
(5.23)
del sólido que se estudia. Las
variables de esta ecuación son los desplazamientos
u;
por lo tanto, el
problema sólo admitirá condiciones de contorno escritas en función de
u.
En la parte del contorno que tiene restricciones en desplazamientos,
denominada
Sd ,
se deberán satisfacer condiciones del tipo de
ui − ūi = 0
donde
ūi
(5.24)
son desplazamientos conocidos. Esta condición ya está escrita
en términos de desplazamientos y no requiere ningún cambio.
Para el borde con fuerzas conocidas, denominado
Sf ,
se debe cum-
plir la condición de equilibrio
σν − f = 0
(5.25)
Para expresar esta condición en función de desplazamientos, hay
que seguir el mismo método explicado para equilibrio en el volumen.
Para ello usamos ecuaciones constitutivas, quedando
3
X
(2µεij νi + δij λ∆νi ) − fj = 0
(5.26)
(2µε + 1λ∆) ν − f = 0
(5.27)
i=1
Técnicas de Solución
127
A continuación se emplean las ecuaciones cinemáticas, para obtener
3
X
i=1
en
#
" 3
X
∂uj
∂um
∂ui
+
+ δij λ
νi − f j = 0
µ
∂Xj ∂Xi
∂X
m
m=1
T
µ ∇u + ∇ u + λ (∇ · u) 1 ν − f = 0
(5.28)
(5.29)
Sf .
La solución del problema elástico lineal según el método de los des-
plazamientos está dada por un vector
u que satisfaga simultáneamente
las tres ecuaciones 5.21 de Navier en el dominio y las condiciones de
fuerzas 5.28 y desplazamientos 5.24 en el contorno.
ui , se pueden usar las cinemátiεij y las constitutivas para calcular
Una vez conocidos las componentes
cas para averiguar las deformaciones
σij .
5.3. Formulación Integral (Formulación Débil)
5.3.1. Introducción
La formulación diferencial (y las condiciones de borde asociadas)
que se vio en la sección previa se denomina también Formulación Fuerte y es la forma habitual de establecer una ecuación de balance en la
física (la mecánica en este caso). Existe una forma alternativa de plantear esta ecuación a través de una expresión integral en la cual el orden
de derivación de las variables involucradas es la mitad que en el caso de
la formulación fuerte. Esta forma alternativa se conoce en el campo de
la mecánica como Principio de Trabajos Virtuales y es más amena
para su solución por técnicas numéricas como se verá en el próximo
capítulo.
5.3.2. Funciones de prueba
La ecuación de equilibrio (o ley de balance local) sobre la que interesa trabajar es de la forma
∇·σ+F=0
Observemos primero que (5.30):
en
V
(5.30)
Introducción a la Teoría de Elasticidad
128
es una ecuación vectorial, es decir que son 3 ecuaciones de equilibrio, una en cada dirección coordenada
sus unidades son fuerzas por unidad de volumen
v (X) (de
componentes vi en
Denamos una función de prueba vectorial
mensional) sobre el dominio
V
con
F L3
momento adilas tres direc-
ciones del espacio. Esta función es de momento tan arbitraria como
se quiera, con la única condición de que sea nita. Supongamos que
multiplicamos cada ecuación de equilibrio por la correspondiente componente de la función de prueba, las sumamos, con lo cual tenemos un
escalar y lo integramos en el volumen del sólido, es decir
ˆ
v · [∇ · σ + F] dV
I=
(5.31)
V
Notar que
I
tiene unidades de fuerza y que:
Si el campo de tensiones
zas
F (X),
σ (X)
está en equilibrio con las fuer-
independientemente de la función
lución
I
con lo cual se anula el corchete, la integral
σ (X) que mantiene
I = 0 ∀v.
v.
se anula
Luego si conocemos la so-
al sólido en equilibrio con las fuerzas
másicas
Si por el contrario existe algún punto del sólido
Xa
en el cual no
se cumple el equilibrio en alguna dirección del espacio
que debido a la continuidad del campo de tensiones
σ
j
, ocurre
no se cum-
ple equilibrio en un entorno (también denido arbitrariamente)
de
Xa .
En dicho entorno el signo del corchete tendrá un signo
único (positivo o negativo) en la dirección
denir una función
vj
j,
entonces es posible
con el mismo signo que el corchete en di-
cho entorno y nula en todo el resto del sólido, de tal forma que
la integral
I > 0. Luego si el sólido no está en equilibrio en algún
punto es siempre posible encontrar una función de prueba que
haga positiva la integral.
σ (X) de un sólido esté en equilibrio con las fuerzas másicas F (X) actuantes es
condición necesaria y suciente que I = 0 ∀v.
Lo anterior permite decir que para que campo
Que
σ (X)
equilibre a
F (X)
no signica que sea la solución del
problema, en realidad hay innitas campos
σ (X) que satisfacen
Técnicas de Solución
129
equilibrio, para ser la solución debe además satisfacer las condiciones de contorno de equilibrio (5.25) en
de contorno esenciales (5.24) en
Sf
y las condiciones
Sd .
5.3.3. Desplazamientos virtuales y velocidades virtuales
Volviendo sobre la función de prueba
v le demos una interpretación
física, supongamos que sea un incremento de desplazamiento (desde la
condición de equilibrio) factible
δu.
Esto implica que
δu:
debe ser continuo, de otra forma se violaría la continuidad del
sólido deformado, lo cual también hace posible evaluar
∇δu
en
todos los puntos.
debe cumplir que
δu = 0
en
Sd ,
pues la solución de equilibrio
buscada debe satisfacer las condiciones esenciales allí
u = ū, por
lo cual todo incremento factible ha de ser nulo en tales puntos.
Además supondremos que
δu
es tan pequeño como se quiera, de tal
forma que no cambia la conguración del sólido. Una segunda interpretación es ver a
v
como un campo de velocidades compatible con los
vínculos, con lo cual debe cumplir las dos condiciones indicada para
δu
y no es necesario suponer que es tan pequeño como se quiera ya
que la velocidad de por sí no modica la conguración.
Si con esta redenición de la función de prueba reinterpretamos la
integral
I , si se usa δu esta resulta con unidades de trabajo en tal caso
diremos que los distintos términos realizan un Trabajo Virtual y si
se supone que es un campo de velocidades la integral tiene unidades
de potencia, y diremos que se trata de una Potencia Virtual.
5.3.4. La integral por partes y el Principio de
Trabajos Virtuales
Con las condiciones indicadas sobre
v
trabajemos sobre la integral
(5.31), primero separemos los dos términos
ˆ
ˆ
v · (∇ · σ) dV +
I=
V
v · F (x) dV
V
(5.32)
Introducción a la Teoría de Elasticidad
130
reemplacemos del Cap. 1 la identidad fundamental (1.66)
ˆ
ˆ
ˆ
T
v σν dS −
I=
∇
S
sim
vT F (x) dV
v : σdV +
V
(5.33)
V
Observemos ahora que:
1.
S
S = Sf
Sd
de (5.33) se puede
Sf
2. que en
Sd v = 0
reducir a Sf
y que en
por lo cual la primera integral
se conocen las fuerzas de contacto y que
σν = f
lo
cual permite introducir esta condición en la solución buscada
luego
∇
I=−
sim
v
vT F (x) dV
T
v f dS +
v : σdV +
(5.34)
V
Sf
V
Si
ˆ
ˆ
ˆ
son desplazamientos virtuales
δu
entonces la suma de las úl-
timas dos integrales son el Trabajo Virtual de las fuerzas Externas
conocidas (de contorno y másicas).
ˆ
TVE
ˆ
δu · f dS +
=
Sf
δu · F (x) dV
V
Recordando la denición del tensor de deformación lineal
1
∇T u + ∇u
2
ε = ∇sim u =
(5.35)
se puede denir un tensor de deformación virtual
δε = ∇sim δu
(5.36)
Con lo cual el segundo término de (5.34) se puede escribir como
ˆ
TVI
=
δε : σdV
(5.37)
V
que es el Trabajo Virtual de las fuerzas Internas. La condición de que
la integral
I
sea nula para toda función de prueba
v = δu
se escribe
ahora como
TVI
= TVE
(5.38)
Técnicas de Solución
131
que se conoce como el Principio de Trabajos Virtuales.
Esta ecuación de trabajos virtuales puede escribirse en función de
los desplazamientos usando las constitutivas
σ = C : ε = C : ∇sim u
con lo cual
ˆ
sim
∇
ˆ
δu : C : ∇
sim
(5.39)
ˆ
δu · f dδV +
u dV =
V
Sf
δu · F (x) dV
(5.40)
V
Notemos que en esta expresión
f
y
F
u
debe permitir calcular
a la derecha son conocidos
∇u
es decir debe ser derivable y por lo
tanto continua
u
debe satisfacer
u = ū
en
Sd
el máximo orden de derivación de
u es 1 a diferencia de las ecua-
ciones de Lamé que es 2.
la función de prueba
δu
cumple condiciones similares a
u,
debe
ser continua y derivable y debe satisfacer las condiciones homogéneas de contorno
δu = 0
en
Sd
La ecuación de trabajos virtuales plantea la condición necesaria y suciente para que el sistema esté en equilibrio, pero no es una condición,
son innitas condiciones, pues esta ecuación debe satisfacerse para
todas las posibles funciones de prueba compatibles con las condiciones
indicadas. Por otro lado la función
u
es desconocida.
Habitualmente las técnicas numéricas escriben la función incógnita
u
en función de un conjunto nito
problema) y utilizan también
permiten plantear
n
n
n
de parámetros (las incógnitas del
funciones de prueba (distintas) que
condiciones en función de
n
incógnitas.
5.4. Elasticidad Bidimensional
En la presentación hasta el momento se ha supuesto que todas las
componentes de tensión y deformación son diferentes de cero. Pero
Introducción a la Teoría de Elasticidad
132
Figura 5.2: Estados de elasticidad bidimensional
existen algunos casos especiales interesantes en los que alguna de las
componentes son nulas, en especial los conocidas como Tensión Plana,
Deformación Plana y Axilsimetría. En estos casos especiales el dominio
de análisis puede reducirse a dos dimensiones y correspondientemente
las incógnitas de desplazamiento también se reducen a las componentes
en el plano de trabajo. En la Figura 5.2 se muestra para los tres casos
a estudiar el plano al que se reduce el análisis
5.4.1. Estados Bidimensionales de Deformación (Deformación Plana)
Un estado de deformación plana puede ocurrir en un sólido prismático
Para que sea válido utilizar esta aproximación debe ocurrir que en
una dirección del espacio (se adopta
X3 )
Que la geometría no cambie, es decir que cortes normales a
X3
sean iguales
Que las cargas actúen en el plano normal (X1 − X2 ) y sean constante en
X3
Que el material no cambie en
X3
y si no es isótropo que
X3
sea
dirección principal de ortotropía
Que las condiciones de contorno esenciales (ūi en
en
X3
Sd ) no cambien
Técnicas de Solución
133
Que en los extremos del sólido los desplazamientos
u3
estén im-
pedidos
Si las condiciones anteriores se cumplen
La geometría queda denida por la sección
X1 − X2
Las cargas másicas y de contorno pueden escribirse
F1
F (X1 , X2 ) = F2 (X1 , X2 )
0
f1
f (X1 , X2 ) = f2 (X1 , X2 )
0
(5.41)
Los desplazamientos se reducen a
u1
u (X1 , X2 ) = u2 (X1 , X2 )
0
(5.42)
El tensor de deformaciones resulta entonces
ε11 ε12 0
ε = ε12 ε22 0
0
0 0
donde claramente
X3
pues
∂ui
∂X3
=0
∂u3
∂Xi
=0
(5.43)
es una dirección principal.
Para un material elástico, la forma del tensor de tensiones asociado
debe ser
σ11 σ12 0
[σij ] = σ21 σ22 0
0
0 σ33
En este problema existe una restricción dada por
(5.44)
ε33 = 0,
que pue-
de escribirse usando las ecuaciones constitutivas, para el caso de un
material isótropo:
ε33
ν
1+ν
=0=
σ33 −
(σ11 + σ22 + σ33 )
E
1−ν
(5.45)
Despejando, se llega a
σ33 = ν (σ11 + σ22 )
(5.46)
Introducción a la Teoría de Elasticidad
134
De modo que solamente hay tres componentes de tensión independientes, que son
σ11 , σ22 , σ12 .
Las ecuaciones constitutivas pueden ahora
compactarse introduciendo las restricciones en tensiones y deformaciones, con lo que resultan:
σ11
σ22
σ12
ν
E (1 − ν)
ε11 +
ε22
=
(1 + ν) (1 − 2ν)
1−ν
E (1 − ν)
ν
=
ε22 +
ε11
(1 + ν) (1 − 2ν)
1−ν
E
=
ε12
1+ν
(5.47)
Finalmente, las ecuaciones de equilibrio resultan en el dominio:
∂σ11 ∂σ21
+
+ F1 = 0
∂X1
∂X2
∂σ12 ∂σ22
+
+ F2 = 0
∂X1
∂X2
ν:
(5.48)
y en el contorno con normal
ν1
ν = ν2
0
f1
f = σν = f2
0
(5.49)
5.4.2. Estados Bidimensionales de Tensión (Tensión
Plana)
Un estado plano de tensiones puede ocurrir en en una pieza plana
de espesor
h
uniforme relativamente pequeño respecto a las otras di-
mensiones. Para que sea válido utilizar esta aproximación debe ocurrir
que en la dirección normal al plano de la pieza (se adopta
X3 )
Que la dimensión (espesor) sea pequeña y constante frente a las
otras dos
Que las cargas actúen en el plano normal (X1
Que si el material no es isótropo que
de ortotropía
X3
− X2 )
sea dirección principal
Técnicas de Solución
135
Que las condiciones de contorno esenciales (ūi en
en
Sd ) no cambien
X3
Que los desplazamientos
u3
no estén impedidos
Entonces EPT implica
La geometría queda denida en el plano
X1 − X2
Las cargas másicas y de contorno se expresen como
F1
F (X1 , X2 ) = F2 (X1 , X2 )
0
f1
f (X1 , X2 ) = f2 (X1 , X2 )
0
(5.50)
El tensor de tensiones se supone que tendrá solo las componentes
no nulas indicadas
σ11 σ12 0
σ = σ12 σ22 0
0
0 0
donde claramente
X3
(5.51)
es una dirección principal
Los desplazamientos tendrán la forma
u1 (X1 , X2 )
u = u2 (X1 , X2 )
u3 (X1 , X2 , X3 )
(5.52)
Respecto a las deformaciones, para un material elástico e isótropo puede mostrarse que las direcciones principales de los tensores
εyσ
coin-
ciden luego
ε11 ε12 0
ε = ε12 ε22 0 (X1 , X2 )
0
0 ε33
(5.53)
Para un material además lineal:
σ33
ε33
ν
E
ε33 +
(ε11 + ε22 + ε33 ) = 0
=
1+ν
1 − 2ν
ν
=−
(ε11 + ε22 )
1−ν
(5.54)
Introducción a la Teoría de Elasticidad
136
Luego
ε33
no es independiente de las otras deformaciones
Las ecuaciones de Equilibrio son las mismas que para un estado
plano de deformación
En el dominio
∂σ11 ∂σ12
+
+ F1 = 0
∂X1
∂X2
∂σ12 ∂σ22
+
+ F2 = 0
∂X1
∂X2
(5.55)
En el contorno resultan
f=
σ11 σ12
σ11 σ22
ν1
ν2
=
σ11 ν1 + σ12 ν2
σ12 ν1 + σ22 ν2
=
f1
f2
(5.56)
Ecuaciones Constitutivas
Al escribir
ε
en función de
1+ν
εij =
E
σ,
se usan las habituales
ν
δij σmm
σij −
1+ν
i, j, m = 1, 2
(5.57)
y la obtenida arriba
ε33 = −
ν
(ε11 + ε22 )
1−ν
(5.58)
De modo que solamente hay tres componentes de deformación in-
ε11 , ε22 , ε12 .
σ en función de ε,
dependientes, que son
Si se escriben
reemplazando
σ11
σ22
σ12
las deformaciones se transforman
ε33
E
ν
E
=
ε11 +
(ε11 + ε22 ) =
[ε11 + νε22 ]
1+ν
1−ν
1 − ν2
E
=
[ε22 + νε11 ]
(5.59)
1 − ν2
E
=
ε12
1+ν
Técnicas de Solución
137
5.4.3. Sólido Asilsimétrico
Un Sólido Axilsimétrico se obtiene haciendo rotar una gura plana
(sección meridional) alrededor de un eje contenido en el plano de la
curva (eje de revolución
X2 ).
Para que pueda verse como un problema
2D debe ocurrir que en la dirección del paralelo (se adopta
asocia con el ángulo
X3
o se
θ)
Que la geometría no tenga discontinuidades
Que las cargas que actúen en el plano normal (X1
constante en
− X2 )
y sean
θ
Que el material no cambie en
θ
y si no es isótropo que
X3
sea
dirección principal de ortotropía
Que las condiciones de contorno esenciales (ūi en
en
Sd ) no cambien
θ
Entonces un sólido axilsimétrico implica
La geometría queda denida por la sección
X2 )
Las cargas másicas (actúan sólo en
X1 − X2
y de contorno son de la
forma
0
F (X1 , X2 ) = F2 (X1 , X2 )
0
f1
f (X1 , X2 ) = f2 (X1 , X2 )
0
(5.60)
Los desplazamientos se reducen a
u (X1 , X2 ) =
u1
u2
(X1 , X2 )
(5.61)
Para escribir el tensor de deformaciones (cinemáticas) es necesario recurrir a coordenadas cilíndricas (r
ε11 ε12 0
ε = ε12 ε22 0
0
0 ε33
= X1 , z = X2 , θr = X3 )
donde claramente
X3
donde
ε33 =
ur
u1
=
r
X1
es una dirección principal
(5.62)
Introducción a la Teoría de Elasticidad
138
Si consideramos un material elástico e isótropo las direcciones principales de los tensores
la forma
εyσ
coinciden luego, el tensor de tensiones tiene
σ11 σ12 0
σ = σ12 σ22 0 (X1 , X2 )
0
0 σ33
(5.63)
Pero a diferencia con el Estado Plano de Deformaciones :
ε33 6= 0
σ33 6= ν (σ11 + σ22 )
Luego
σ33
(5.64)
(5.65)
es independiente de las otras tensiones. Notar que
ε33 =
ur
,
r
es decir que depende de desplazamientos en el plano.
En el contorno con normal
ν
ν1
ν = ν2
0
las cargas externas son de la forma:
f1
f = σν = f2
0
(5.66)
Respecto a las ecuaciones de equilibrio
En el dominio quedan dos ecuaciones de equilibrio (coordenadas
cilíndricas)
∂σ11 ∂σ12 (σ11 − σ33 )
1 ∂σ11 X1 ∂σ12 −σ33
+
+
=
+
+
=0
∂X1
∂X2
X1
X1 ∂X1
∂X2
X1
∂σ12 σ12 ∂σ22
1 ∂σ12 X1 ∂σ22
+
+
+ F2 =
+
+ F2 = 0
∂X1
X1
∂X2
X1 ∂X1
∂X2
(5.67)
En el contorno resultan
t1
t2
=
σ11 σ12
σ11 σ22
ν1
ν2
=
σ11 ν1 + σ12 ν2
σ12 ν1 + σ22 ν2
=
f1
f2
(5.68)
En cuanto a las ecuaciones constitutivas, para escribir tensiones en
función de deformaciones, se usan las habituales
E
σij =
1+ν
εij +
ν
δij εmm
1 − 2ν
i, j, m = 1, 3
(5.69)
Técnicas de Solución
139
Si se escriben deformaciones en función de tensiones
1+ν
εij =
E
ν
σij −
δij σmm
1+ν
(5.70)
donde
ε13 = ε23 = σ13 = σ23 = 0
(5.71)
5.5. Notación matricial de los tensores involucrados
En este tipo de problemas resulta necesario manejar tensores de
4to. orden, desde el punto de vista computacional esto no es deseable,
y si bien analíticamente y conceptualmente es conveniente y necesario
trabajar con ellos, a veces es más visual manejarlos en la forma que
se detalla a continuación. Los tensores de segundo orden se manejan
como vectores y los tensores de 4to orden como matrices, así al tensor
de deformaciones que tiene 9 componentes, pero sólo seis diferentes
debido a su simetría, lo manejaremos como un arreglo (vector) de seis
componentes ordenados de la forma
ε=
ε11
ε22
ε33
2ε12
2ε23
2ε13
(5.72)
la razón de por qué considerar dos veces las deformaciones de corte
quedará claro más adelante. Este tensor que depende de tres componentes de desplazamiento puede escribirse como un operador lineal
B
Introducción a la Teoría de Elasticidad
140
sobre el vector
u
∂
∂x1
0
0
=
∂
∂x2
0
∂
ε=
ε11
ε22
ε33
2ε12
2ε23
2ε13
∂x3
0
∂
∂x2
0
∂
∂x1
∂
∂x3
0
0
0
∂
u1
∂x3
u2 = B u
0
u3
∂
∂x2
∂
∂x1
(5.73)
Similarmente el tensor de tensiones lo podemos expresar como un vector de seis componentes ordenado de la siguiente forma
σ=
σ11
σ22
σ33
σ12
σ23
σ31
(5.74)
La relación que liga tensiones con deformaciones está denida por el
tensor de elasticidad
C
(de cuarto orden), esta relación cuando se
expresa en términos de los tensores de 2do orden expresados como
arreglos de una dimensión conduce a la siguiente expresión (material
elástico lineal e isótropo):
σ=
σ11
σ22
σ33
σ12
σ23
σ31
= E
1+ν
1−ν
1−2ν
ν
1−2ν
ν
1−2ν
ν
1−2ν
1−ν
1−2ν
ν
1−2ν
ν
1−2ν
ν
1−2ν
1−ν
1−2ν
1
2
1
2
1
2
ε11
ε22
ε33
2ε12
2ε23
2ε13
= Cε
(5.75)
σ = CBu
(5.76)
Técnicas de Solución
141
Dado que tratamos con el tensor de deformación lineal, las deformaciones virtuales pueden escribirse de la misma forma que las reales
δε =
δε11
δε22
δε33
2δε12
2δε23
2δε13
= B δu
(5.77)
Notar que en la expresión del trabajo virtual interno (5.37) podemos escribir en lugar del producto interno de tensores de 2do. orden
δε : σ ≡ δε · σ = δεT σ , donde en el primer miembro de la equivalencia
estamos considerando tensores y en el segundo miembro la notación
vectorial. El segundo miembro de esta igualdad indica la forma estándar de expresar un producto interno de dos vectores columnas como
una multiplicación de matrices. Si reemplazamos (5.73 y 5.77) este
producto interno puede escribirse nalmente:
δεT σ = δuT B T C B u
5.5.1. Elasticidad Bidimensional
5.5.1.1. Relaciones constitutivas
Las ecuaciones constitutivas pueden escribirse como producto de
matrices
σ = Cε
EPT
ε11
0
0 ε22
1−ν
2ε12
2
σ11
1 ν
σ22 = E ν 1
1 − ν2
σ12
0 0
EPD
σ11
σ22 = E
1+ν
σ12
1−ν
1−2ν
ν
1−2ν
ν
1−2ν
1−ν
1−2ν
0
0
0
ε11
0 ε22
1
2ε12
2
SA
σ11
σ22
E
σ12 = 1 + ν
σ33
1−ν
1−2ν
ν
1−2ν
ν
1−2ν
1−ν
1−2ν
0
0
ν
1−2ν
ν
1−2ν
0
0
1
2
ν
1−2ν
ν
1−2ν
1−ν
1−2ν
ε11
ε22
2ε12
ε33
Introducción a la Teoría de Elasticidad
142
5.5.1.2. Relaciones cinemáticas
En tanto que las cinemáticas se escriben como los operadores
ε=
B u:
EPT y EPD
ε11
ε22 =
2ε12
∂
∂X1
ε11
ε22
2ε12 =
ε33
∂
∂X1
SA
∂
∂X2
∂
∂X2
1
X1
∂
∂X2
∂
∂X1
u1
u2
u1
u2
∂
∂X2
∂
∂X1
5.5.1.3. Formulación Diferencial
En todos los casos las ecuaciones de equilibrio son 2 (en las direcciones en el plano
X1 − X2 )
y pueden escribirse en función de las dos
componentes de desplazamiento (u1
− u2 ). Para ello se sigue el camino
ya descripto para el caso tridimensional.
Partiendo de las ecuaciones de equilibrio
Se reemplazan las tensiones en función de las deformaciones usando constitutivas
Se reemplazan las deformaciones en función de los desplazamientos usando cinemáticas
Para EPD y EPT
Las condiciones de equilibrio son
∂σ11 ∂σ12
+
+ F1 = 0
∂X1
∂X2
∂σ12 ∂σ22
+
+ F2 = 0
∂X1
∂X2
que pueden escribirse
∂
∂X1
∂
∂X2
∂
∂X2
∂
∂X1
σ11
σ22 + F1
= Sσ + F = 0
F2
σ12
Técnicas de Solución
143
notar que
S = BT
Reemplazando
σ = CB u
se tiene
SCB u + F = 0
Para SA
∂
∂X1
+
1
X1
∂
∂X2
Reemplazando
σ
11
σ22
+ 0 = Sσ + F = 0
σ12
F2
σ33
∂
∂X2
∂
+ X11
∂X1
− X11
σ = CB u
se tiene
SCB u + F = 0
5.5.1.4. Trabajos Virtuales
En el caso que se utilice el Principio de trabajos Virtuales. Debemos
denir además en forma análoga
δε = B δu
luego el trabajo virtual interno es
ˆ
ˆ
δεT CεdV
T
δε σdV =
TV I =
ˆV
V
(B δu)T CB udV
=
ˆV
δuT B T CB udV
=
V
Trabajo Virtual Externo
Las cargas externas son similares al caso
3D. Debe tenerse en cuenta el dominio de integración
ˆ
TV E =
δuT f dS
δu FdV +
V
la
ˆ
T
Sσ
Donde el diferencial de área dS depende del tipo de estado (ds es
longitud de arco sobre el contorno)
Introducción a la Teoría de Elasticidad
144
EPT
dS = h ds
EPD
dS = ds
SA
con
h
el espesor
y se supone que se analiza un espesor unitario
dS = r ds
donde
r = X1
considera un ángulo unitario (θ
es el radio y en la integral se
=1
rad)
5.6. Ejercicios
Ejercicio 5.1.
Consideremos un elemento estructural elástico de
forma cúbica de lados unitarios. El campo de desplazamientos se ha
encontrado que vale
u1 = a X1 X2 X3 + b X12 X2
u2 = c X1 X2 X3 + d X22 X3
u3 = e X1 X2 X3 + f X32 X1
para
0 ≤ Xi ≤ 1.
Calcule las fuerzas másicas que satisfacen equilibrio
en el volumen, usando las ecuaciones Navier.
Solución:
En el dominio
V,
se deben satisfacer las ecuaciones de
Navier:
X
X ∂ 2 uj
∂
∂um
+ (µ + λ)
+ Fj = 0
µ
2
∂X
∂X
P ∂Xm
j
i
i
m
para
j = 1,
∂ 2 u1 ∂ 2 u1 ∂ 2 u1
F1 = −µ
+
+
∂X12
∂X22
∂X23
2
∂ u1
∂ 2 u2
∂ 2 u3
− (λ + µ)
+
+
∂X12 ∂X1 ∂X2 ∂X1 ∂X3
Evaluando las derivadas de
u1 , u2 , u3
se llega a
F1 = − (2bX2 ) µ − (2bX2 + cX3 + eX2 ) (λ + µ)
Para
j=2
y
j=3
se obtiene
F2 = − (2X3 d) µ − (aX3 + 2bX1 + 2X3 d + eX1 ) (λ + µ)
F3 = − (2gX1 ) µ − (aX2 + cX1 + 2X2 d) (λ + µ)
Técnicas de Solución
Fi
ui
145
son las fuerzas en equilibrio con las tensiones que surgen de los
datos.
Ejercicio 5.2.
Para el problema anterior, calcule cuanto valen las
fuerzas sobre la parte del contorno
Sf .
Solución: En el contorno S , las fuerzas fj
fj =
X
i
resultan
#
" X
∂uj
∂um
∂ui
+
+ δij λ
νi
µ
∂Xj ∂Xi
∂Xm
m
Consideremos la componente
f1
∂u1
∂u2
∂u3
∂u1
+λ
+
+
ν1 +
f1 = 2µ
∂X1
∂X1 ∂X2 ∂X3
∂u2
∂u1
∂u3
∂u1
+ µ
+
ν2 + µ
+
ν3
∂X1 ∂X2
∂X1 ∂X3
Para la cara donde
X1 = 0, X2 , X3 6= 0,
X1 = 0
ν1 = −1
X2 , X3 6= 0
ν2 = ν3 = 0
resulta
f1 = −µ (2aX2 X3 ) − λ (aX2 X3 + 2dX2 X3 )
o bien
f1 = − (2µa + λa + 2λd) X2 X3
De manera similar, es necesario evaluar
f2 , f3 ,
para las otras caras
del sólido en estudio.
Ejercicio 5.3. Derive las ecuaciones de un estado plano de tensio-
nes, en el que además se cumple que
Ejercicio 5.4.
σ22 = 0.
Derive las ecuaciones de un estado unidimensional
de tensiones, en el que solamente hay una componente no nula,
Ejercicio 5.5.
σ11 .
Derive las ecuaciones de un estado unidimensional
de deformaciones, en el que solamente hay una componente no nula,
ε11 .
Ejercicio 5.6. Se quiere descomponer un tensor de tensiones tri-
dimensionales como la suma de un estado plano de deformaciones más
otro tensor. ¾Cuánto valen las componentes de ese segundo tensor?
146
Introducción a la Teoría de Elasticidad
Bibliografía
[1] Dym, C. y Shames, I., Solid Mechanics: A Variational Approach,
McGraw-Hill, 1973.
[2] Feijóo, R. A., Introducción a la Mecánica del Continuo, I Escola
de Matematica Aplicada, LNCC, Río de Janeiro, 1978.
[3] Fung, Y. C., Tong, P., Classical and Computational Solid Mecha-
nics, World Scientic, Singapore, 2001.
[4] Godoy, L. A., Prato, C. A., Barto, C. A., Introducción a la Mecá-
nica de los Sólidos, Universidad Nacional de Córdoba, Córdoba,
1983.
[5] Gurtin, M., An Introduction to Continuum Mechanics, Academic
Press, New York, 1981.
[6] Malvern, L., Introduction to the Mechanics of a Continuous Me-
dium, Prentice Hall, Englewood Clis, 1969.
[7] Marsden, J. y Hughes, T., Mathematical Foundations of Elasticity,
Prentice Hall, Englewood Clis, 1983.
[8] Mase, G.T., Mase, G.E, Continuum Mechanics for Engineers,
CRC Press, 1999.
[9] Novozhilov, V.V., Theory of Elasticity, Traducción del ruso al inglés del US Department of Commerce, Washington, 1961.
[10] Santaló, L., Vectores y Tensores, Eudeba, Buenos Aires, 1967.
[11] Sokolniko, I.S., Análisis Tensorial, McGraw-Hill, 1961.
147
Introducción a la Teoría de Elasticidad
148
[12] Sokolniko, I.S., The Mathematical Theory of Elasticity, McGrawHill, 1956.
[13] Timoshenko, S. y Goodier, N., Teoría de la Elasticidad, McGrawHill, New York, 1961.
[14] Washizu, K., Variational Methods in Elasticity and Plasticity, Pergamon Press, 1968.