Introducción a la Geometría Proyectiva
Anuncio

UPM-DISAM
Grupo Visión
ISA - UMH
Visión 3D
Introducción a la
Geometría Proyectiva
José María Sebastián – Luis Miguel Jiménez
1
Tabla de Contenidos
Introducción: ¿Qué es la Geometría Proyectiva?
Espacio Proyectivo Pn
Recta Proyectiva P1
Plano Proyectivo P2
Homografías entre Planos Proyectivos
INGENIERÍA DE SISTEMAS Y AUTOMÁTICA - UMH
Visión 3D
Geometría Proyectiva I
2
1
Qué es la Geometría Proyectiva
Geometría Euclídea: Invarianza de longitudes y áreas. Se define el
círculo. Transformaciones: rotación, traslación. Coordenadas cartesianas
Geometría Afín: Invarianza del paralelismo, relación de distancias. Se
define el paralelogramo, las parábolas, elipses e hipérbolas.
Coordenadas cartesianas oblicuas.
Geometría Proyectiva: Invarianza de la relación doble o “cross-ratio”. Se
define la cónica, cuádricas. Coordenadas proyectivas u homogéneas
INGENIERÍA DE SISTEMAS Y AUTOMÁTICA - UMH
Visión 3D
Geometría Proyectiva I
3
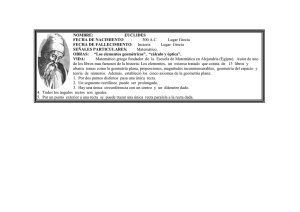
Qué es la Geometría Proyectiva
A
C
B
D
Transformación
Euclídea
Afín
AD = cte
AB
= cte
AD
AC
Proyectiva
INGENIERÍA DE SISTEMAS Y AUTOMÁTICA - UMH
Visión 3D
AD = cte
BC
BD
Geometría Proyectiva I
4
2
Qué es la Geometría Proyectiva
Qué aporta la Geometría Proyectiva a la Visión Artificial
El proceso de proyección central (modelo pinhole) es básicamente proyectivo: no
es ni euclídeo (no conserva las distancias ) ni afín (no conserva la noción de
paralelismo)
El reconocimiento de formas del ser humano se basa en parte también en
características proyectivas invariantes.
Suministra un modelo lineal (si no hay distorsiones) del proceso de captación de
imágenes.
Permite estructurar la información según su robustez.
Homogenización de elementos. Dualidad entre puntos y rectas en un plano
Transformación entre planos proyectivos
Correlación entre puntos y rectas cuando se manejas distintos planos proyectivos
INGENIERÍA DE SISTEMAS Y AUTOMÁTICA - UMH
Visión 3D
Geometría Proyectiva I
5
Qué es la Geometría Proyectiva
Homogenización de elementos. Dualidad entre puntos y rectas en un plano
Geometría Euclídea: Rectas en un plano:
⌧Hay una única recta que pasa por dos puntos dados
⌧Una una única que recta que pasa por un punto dado y tiene una dirección absoluta
dada
⌧Dos rectas que no coinciden, o tienen un único punto de intersección o tienen la misma
dirección absoluta
Geometría Proyectiva: se sustituye dirección absoluta por puntos en el infinito, y
todos los puntos en el infinito por la recta en el infinito:
⌧Hay una única recta entre dos puntos distintos
⌧Hay un único punto entre dos rectas distintas
INGENIERÍA DE SISTEMAS Y AUTOMÁTICA - UMH
Visión 3D
Geometría Proyectiva I
6
3
Qué es la Geometría Proyectiva
•No conserva la distancias
•No conserva las rectas paralelas
•No conserva los ángulos
INGENIERÍA DE SISTEMAS Y AUTOMÁTICA - UMH
Visión 3D
Geometría Proyectiva I
8
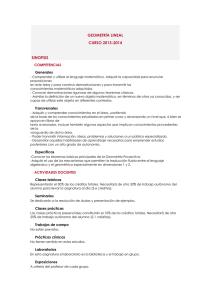
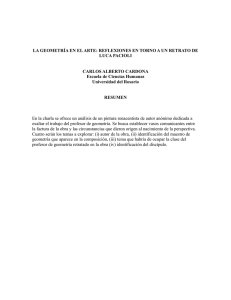
Qué es la Geometría Proyectiva
• Centro de Proyección
Fuente Luminosa
Perspectiva
Sombra
La composición de dos transformaciones de perspectiva no es
una transformación de perspectiva
INGENIERÍA DE SISTEMAS Y AUTOMÁTICA - UMH
Visión 3D
Geometría Proyectiva I
10
4
Qué es la Geometría Proyectiva
Primera Pieza
Segunda Pieza
INGENIERÍA DE SISTEMAS Y AUTOMÁTICA - UMH
Visión 3D
Geometría Proyectiva I
13
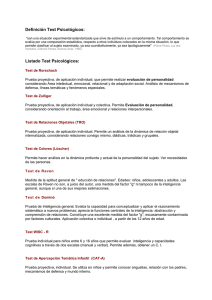
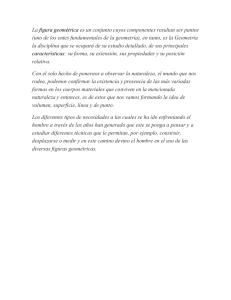
Qué es la Geometría Proyectiva
Euclideo
Similaridad
Afín
Proyectivo
X
X
X
X
X
X
X
X
X
X
Transformaciones:
Rotación, traslación
Escalado isotrópico
Escalado en ejes
Trasformaciones perspectiva
Invariantes:
Distancia
Ángulos, ratios de distancias
Paralelismo, centro de masa
Incidencia, cross-ratio
X
X
X
X
X
X
X
X
X
X
INGENIERÍA DE SISTEMAS Y AUTOMÁTICA - UMH
Visión 3D
Geometría Proyectiva I
14
5
Tabla de Contenidos
Introducción
Espacio Proyectivo Pn
Recta Proyectiva P1
Plano Proyectivo P2
Homografías entre Planos Proyectivos
INGENIERÍA DE SISTEMAS Y AUTOMÁTICA - UMH
Visión 3D
Geometría Proyectiva I
15
Espacio Proyectivo Pn
~
x ∈ P n si
~
x = [ x1 , L , x n +1 ]T con algún x i ≠ 0
~
x , ~y ∈ P n ; ~
x ≅ ~y si existe λ ≠ 0 tal que
xi = λ y i
Colineación : Transformación proyectiva entre objetos
(del mismo tipo) en un espacio proyectivo
~
Se representa por matrices A( n +1)×( n +1)
(normalmente invertibles)
~
ρ~y = A~x
~
Conjunto de las A ⇒ Grupo proyectivo.
INGENIERÍA DE SISTEMAS Y AUTOMÁTICA - UMH
Visión 3D
Geometría Proyectiva I
16
6
Espacio Proyectivo Pn
Base Proyectiva : Conjunto de ( n + 2) puntos tal que
( n + 1) sean linealmente independie ntes.
por ejemplo :
⎡1⎤
⎡0 ⎤
⎡0 ⎤
⎡1 ⎤
⎢⎥
⎥
⎢
⎥
⎢
⎥
⎢
e~1 = ⎢0⎥ e~2 = ⎢1 ⎥ K e~n +1 = ⎢0⎥ ~
en + 2 = ⎢1⎥
⎢M ⎥
⎢M⎥
⎢M⎥
⎢M⎥
⎢⎣1⎥⎦
⎢⎣1 ⎥⎦
⎢⎣0⎥⎦
⎢⎣0⎥⎦
si se tiene ~
x1 L ~
xn + 2 puntos tal que hay ( n + 1) l.i. existe
~
~~
una A tal que A e = λ ~
x
i = 1, K , n + 2
i
i i
INGENIERÍA DE SISTEMAS Y AUTOMÁTICA - UMH
Visión 3D
Geometría Proyectiva I
17
Tabla de Contenidos
Introducción
Espacio Proyectivo Pn
Recta Proyectiva P1
Plano Proyectivo P2
Homografías entre Planos Proyectivos
INGENIERÍA DE SISTEMAS Y AUTOMÁTICA - UMH
Visión 3D
Geometría Proyectiva I
18
7
Recta Proyectiva P1
T
x ∈ P1 ⇒ ~
x = [x1 , x2 ]
Punto pertenecie nte recta proyectiva ~
* Si x2 ≠ 0 se puede poner como
⎡x
~
x = x2 ⎢ 1
⎣ x2
⎤
,1⎥
⎦
x1
T
* Si se representa X 1 =
x1
=α
x2
~
x
X es la coordenada de la recta afín.
α es el parámetro proyectivo .
1
x2
* De esta forma cada punto representa una dirección.
* Faltaría por considerar el punto [x1 ,0] que no pertenece
T
a la recta afín. Es el punto en el infinito.
INGENIERÍA DE SISTEMAS Y AUTOMÁTICA - UMH
Visión 3D
Geometría Proyectiva I
19
Recta Proyectiva P1
" Cross - Ratio" o Razón doble de cuatro puntos :
~
~
C r a~ , b ; c~ , d si se denomina por α a , α b , α c , α d los
{
}
parametros proyectivo s de cada punto
{
x2
a~ ′
~
l
~
b′
a~
~
b
~
d
~
x
Es invariante ante
cualquier colinealidad.
c~ ′
c~
}
~
~
α −αc αb −αc
C r a~ , b ; c~ , d = a
:
αa −αd αb −αd
~
l′
~
d′
x1
~ ⎡r s⎤
A=⎢
⎥
⎣u v ⎦
INGENIERÍA DE SISTEMAS Y AUTOMÁTICA - UMH
Visión 3D
Geometría Proyectiva I
20
8
Recta Proyectiva P1
•El “Cross-Ratio” o razón doble de cuatro puntos depende
del orden en que se tomen los puntos:
Así si:
{
}
~
~
α −αc αb −αc
C r a~ , b ; c~ , d = a
:
=τ
αa −αd αb −αd
Se pueden obtener : τ ,
1
τ
,1−τ ,
1
τ −1 τ
,
,
1−τ
τ
τ −1
INGENIERÍA DE SISTEMAS Y AUTOMÁTICA - UMH
Visión 3D
Geometría Proyectiva I
21
Tabla de Contenidos
Introducción
Espacio Proyectivo Pn
Recta Proyectiva P1
Plano Proyectivo P2
Homografías entre Planos Proyectivos
INGENIERÍA DE SISTEMAS Y AUTOMÁTICA - UMH
Visión 3D
Geometría Proyectiva I
22
9
Plano Proyectivo P2
T
~
x ∈ P2 ⇒ ~
x = [x1 , x 2 , x 3 ]
~
~
T
* Recta
l ∈ P 2 ⇒ l = [l1 , l 2 , l 3 ]
~T ~
* Recta que pasa por un punto
l ⋅x = 0
* Punto
* Dualida entre puntos y rectas
- Conjunto de puntos que
están en una recta.
- Conjunto de rectas que
pasan por punto.
INGENIERÍA DE SISTEMAS Y AUTOMÁTICA - UMH
Visión 3D
Geometría Proyectiva I
23
Plano Proyectivo P2
x x
~
x = [ x1 , x 2 , x 3 ]T ⇒ ~
x = [ 1 , 2 ,1]T =
x3 x3
* Si x 3 ≠ 0
= [X 1 , X 2 ,1] T
* Este conjunto de puntos define el plano afín
x1
( x 1 , x 2 ,0 )
Línea en el
infinito
* Falta por
considerar los
Plano
afín
puntos con x 3 = 0
~
x
1
x3
x2
que define la
recta en el infinito.
INGENIERÍA DE SISTEMAS Y AUTOMÁTICA - UMH
Visión 3D
Geometría Proyectiva I
24
10
Plano Proyectivo P2
* Pertenenci a de un punto a una recta en el plano proyectivo
~T ~
l ⋅ x = 0 ⇒ l1 x1 + l 2 x2 + l3 x3 = 0
* Pertenenci a de un punto a una recta en el plano afín.
l1 X 1 + l2 X 2 + l3 = 0
* Punto que pertenece a una recta que pasa por los puntos ~
x1 , ~
x2
~
~
x = α~
x1 + β ~
x2
ó
x = γ~
x1 + ~
x2
~
~
y la recta
l = ~
x1 ∧ ~
x2 ⇒
l T~
x = 0
INGENIERÍA DE SISTEMAS Y AUTOMÁTICA - UMH
Visión 3D
Geometría Proyectiva I
25
Plano Proyectivo P2
Producto Vectorial:
~ ~ ~ ~ ~
l = x ∧ y = [ x ]∧ y
x1 ⎤
⎡~
~
x = ⎢⎢ ~
x 2 ⎥⎥
⎢⎣ ~
x 3 ⎥⎦
⎡ 0
⎢
x ]∧ = ⎢ ~
x3
[~
⎢− ~
⎣ x2
x3
−~
0
~
x1
~
x2 ⎤
⎥
x1 ⎥
−~
0 ⎥⎦
INGENIERÍA DE SISTEMAS Y AUTOMÁTICA - UMH
Visión 3D
Geometría Proyectiva I
26
11
Plano Proyectivo P2
* " Cross - Ratio" o razón doble
de cuatro rectas que se
cortan en un punto
~ ~ ~ ~
~
~
la , lb ; lc , ld = a~ , b ; c~ , d
{
} {
~
la
~
lb
~
l
a~
}
~
lc
~
b
~
Es independie nte de la recta l
que corte a las cuatro rectas.
c~
~
d
~
ld
* Haz de rectas : Rectas que pasan por un punto fijo.
Es un elemento proyectivo de dimensión uno.
l = α l1 + β l 2
INGENIERÍA DE SISTEMAS Y AUTOMÁTICA - UMH
Visión 3D
Geometría Proyectiva I
27
Plano Proyectivo P2
* Colineació n en el plano proyectivo . Forma un grupo proyectivo
⎛ a11
~~
~ ⎜
~
ρ y = A x ⇒ A = ⎜ a21
⎜a
⎝ 31
* Subgrupo
afín
~
x
Si ~y ≅ A ~
⇒
a12
a22
a32
a13 ⎞
⎟
a23 ⎟ .
a33 ⎟⎠
a 33 b 2 x 1 ⎞
~ ⎛a B
⎟
A = ⎜⎜ 33 2 x 2
a 33 ⎟⎠
0
1x2
⎝
⎛ x1 ⎞
⎛ y1 ⎞
⎜ ⎟ ⎛a B
a 33 b 2 x 1 ⎞ ⎜ ⎟
⎟⎟ ⎜ x 2 ⎟
⇒ ⎜ y 2 ⎟ = ⎜⎜ 33 2 x 2
a 33 ⎠ ⎜ ⎟
⎜ y ⎟ ⎝ 01x 2
⎝ x3 ⎠
⎝ 3⎠
⎛ Y1 ⎞
⎜ ⎟ ⎛ B2 x2
⎜ Y 2 ⎟ = ⎜⎜
⎜ 1 ⎟ ⎝ 01x 2
⎝ ⎠
⎛ X1 ⎞
⎟
b 2 x1 ⎞ ⎜
⎟⎟ ⎜ X 2 ⎟ ⇒
1 ⎠⎜
⎟
⎝1 ⎠
⎛ Y1 ⎞
⎛X ⎞
⎜⎜ ⎟⎟ = B 2 x 2 ⎜⎜ 1 ⎟⎟ + b 2 x 1
⎝ Y2 ⎠
⎝X2⎠
INGENIERÍA DE SISTEMAS Y AUTOMÁTICA - UMH
Visión 3D
Geometría Proyectiva I
28
12
Plano Proyectivo P2
* Subgrupo afín : Mantiene la recta en el infinito.
⎛ a 33 B 2 x 2
⎜⎜
⎝ 01 x 2
⎛ x1 ⎞ ⎛
⎛ x ⎞ ⎞ ⎛ y1 ⎞
a 33 b 2 x1 ⎞ ⎜ ⎟ ⎜ a 33 B 2 x 2 ⎜ 1 ⎟ ⎟ ⎜ ⎟
⎜ x ⎟ ⎟ = ⎜ y2 ⎟
⎟⎜ x 2 ⎟ =
⎝ 2⎠
a 33 ⎟⎠ ⎜ ⎟ ⎜⎜
⎟ ⎜ 0 ⎟
0
⎠ ⎝ ⎠
⎝ 0⎠ ⎝
* Transformación de similitud : Además de mantener la recta
~ ~
en el infinito, mantiene los puntos absolutos (1,±i, 0)T = i , j
será
⎛ Y1 ⎞ ⎛ cos θ senθ ⎞⎛ X 1 ⎞
⎜⎜ ⎟⎟ = c⎜⎜
⎟⎟⎜⎜ ⎟⎟ + b2 x1
⎝ Y2 ⎠ ⎝ − senθ cos θ ⎠⎝ X 2 ⎠
rota (θ ) Escala (c)
Traslada (b)
* Transforma ción euclídea : Tranformac ión de
similitud con c = 1
INGENIERÍA DE SISTEMAS Y AUTOMÁTICA - UMH
Visión 3D
Geometría Proyectiva I
29
Plano Proyectivo P2
Correspondencia Homográfica u Homografía:
Correspondencia uno a uno que mantiene la razón doble entre cuatro elementos
(lineal e invertible). Puede ser entre:
⌧Punto a punto
⌧Recta a recta
⌧Haz de rectas a haz de rectas
⌧Punto a recta
⌧.......
INGENIERÍA DE SISTEMAS Y AUTOMÁTICA - UMH
Visión 3D
Geometría Proyectiva I
30
13
Plano Proyectivo P2
Correlación:
Transforma rectas en puntos y viceversa
~ ~~
l =Fx
Composició
Composición de dos correlaciones: Colineació
Colineación
~ ~~
~
~
l = F x ; l ′ = F′~
x′
~ −1 ~
Si ~
x′ = F ′ l ′
~ ~ ~ ~ ~ −1 ~ ~ ~
l = F x = F F ′ l′ = A l′
( )
( )
INGENIERÍA DE SISTEMAS Y AUTOMÁTICA - UMH
Visión 3D
Geometría Proyectiva I
31
Plano Proyectivo P2
* Ángulo entre dos
~ ~
rectas l1 , l2
~
lai
~
i
Se trazan las rectas
auxiliares :
~
lai = Pasa por
~
laj = Pasa por
~
a~ , i
~
a~ , j
( {
~ ~ ~ ~
1
log Cr l1 , l2 ; lai , laj
2i
~
x1
~
laj
~
j
~
x2
Se cumple :
α =
~
l1
l∞
})
~
l2
a~
INGENIERÍA DE SISTEMAS Y AUTOMÁTICA - UMH
Visión 3D
Geometría Proyectiva I
32
14
Plano Proyectivo P2
* Cónicas : Conjunto de puntos del plano proyectivo
3
que cumplen : S ( ~
x) =
∑C
i , j =1
ij
~
xi x j = 0 ; S ( ~
x) = ~
x T C~
x =0
x=~
x1 + θ ~
x2
* Intersecci ón de una cónica con una recta ~
S (~
x ) + 2θ S ( ~
x ,~
x ) + θ 2 S (~
x )=0
1
1
2
2
∗ Tangente a una cónica S ( ~
x1 , ~
x2 ) 2 − S ( ~
x1 ) S ( ~
x2 ) = 0
Polar
* Se cumple :
~
~ ~
lpolar = C Ppolo
Polo
INGENIERÍA DE SISTEMAS Y AUTOMÁTICA - UMH
Visión 3D
Geometría Proyectiva I
33
Plano Proyectivo P2
La matriz de la có
cónica posee seis variables, aunque só
sólo cinco grados de
libertad (factor de escala). La có
cónica estará
estará definida por cinco puntos.
Definidos cuatro puntos de una có
cónica, cualquier otro punto de la có
cónica
cumple:
~
b
c~
a~
~
d
~
lb
~
la
~
lc
∀x
Cr
{
tal que s ( ~
x) = 0
~ ~ ~ ~
l a , lb ; l c , l d = cte
}
~
ld
~
x
INGENIERÍA DE SISTEMAS Y AUTOMÁTICA - UMH
Visión 3D
Geometría Proyectiva I
34
15
Plano Proyectivo P2
El objeto dual de la có
cónica es la envolvente a la có
cónica: conjunto de
tangentes a todos los puntos de la có
cónica. Se cumple:
~
lt
~
s (~
x)= ~
xT C ~
x
~
x
;
~ ~~
lt = C x
Si la cónica es no degenerada :
~ ~
~
x = C −1 lt
Sustituyen do :
~T ~ ~ ~ ~ ~T ~ ~
~
s (~
x ) = lt C −T C C −1 lt = lt C −T lt = s lt
()
INGENIERÍA DE SISTEMAS Y AUTOMÁTICA - UMH
Visión 3D
Geometría Proyectiva I
35
Plano Proyectivo P2
La có
cónica define una correlació
correlación entre puntos del plano y rectas
polares:
~
lt
~
x
~ ~~
lt = C x
~
P Polo
~
~~
lPolar = C PPolo
~
l Polar
La có
cónica define una correlació
correlación entre sus puntos y sus tangentes:
INGENIERÍA DE SISTEMAS Y AUTOMÁTICA - UMH
Visión 3D
Geometría Proyectiva I
36
16
Plano Proyectivo P2
Una transformació
transformación proyectiva convierte una có
cónica en otra:
~
~
~
s (~
x)= ~
xT C ~
x Si ~
y = T~
x ; ~
x = T −1 ~
y
~
~ ~ ~
s (~
y)= ~
y T T −T C T ~
y=~
yT C′ ~
y
Al ser la matriz simé
simétrica, mediante una transformació
transformación proyectiva la
⎡λ 1
~ ⎢
C′ = ⎢ 0
⎢0
⎣
matriz se puede diagonalizar.
diagonalizar.
0
λ2
0
0 ⎤
⎥
0 ⎥
λ 3 ⎥⎦
INGENIERÍA DE SISTEMAS Y AUTOMÁTICA - UMH
Visión 3D
Geometría Proyectiva I
37
Plano Proyectivo P2
Si la có
cónica posee puntos
reales, la matriz se puede
expresar como:
Mediante otra transformació
transformación
se puede obtener
⎡α 2
~ ⎢
C′ = ⎢ 0
⎢ 0
⎣
⎡1
~
C ′ = ⎢⎢ 0
⎢⎣ 0
Cualquier có
cónica puede ser transformada
proyectivamente en un cí
círculo
0 ⎤
⎥
0 ⎥
− γ 2 ⎥⎦
0
β2
0
0
1
0
0⎤
0 ⎥⎥
− 1⎥⎦
x12 + x 22 − 1 = 0
INGENIERÍA DE SISTEMAS Y AUTOMÁTICA - UMH
Visión 3D
Geometría Proyectiva I
38
17
Plano Proyectivo P2
Transformando tres puntos de la
cónica a los puntos de referencia
(base)
Con lo que la ecuació
ecuación
de la có
cónica será
será:
⎡ 0
~ ⎢
C′ = ⎢ 0
⎢⎣ − 0 . 5
⎧ x 22 − x1 x 3 = 0
⎪
⎨
⎪Si x 3 ≠ 0 ⇒
⎩
Las coordenadas de la có
cónica
se pueden expresar como:
INGENIERÍA DE SISTEMAS Y AUTOMÁTICA - UMH
Visión 3D
⇒
0
1
0
− 0 .5 ⎤
0 ⎥⎥
0 ⎥⎦
x 22 = x1 x 3
2
⎛ x2 ⎞
x
⎟⎟ = 1 = θ
⎜⎜
x3
⎝ x3 ⎠
2
⎡θ 2 ⎤
⎡ x1 ⎤
⎢ x ⎥ = T~ ⎢ θ ⎥
⎢
⎥
⎢ 2⎥
⎢
⎥
⎢⎣ x 3 ⎥⎦
⎣ 1 ⎦
Geometría Proyectiva I
39
Tabla de Contenidos
Introducción
Espacio Proyectivo Pn
Recta Proyectiva P1
Plano Proyectivo P2
Homografías entre Planos Proyectivos
INGENIERÍA DE SISTEMAS Y AUTOMÁTICA - UMH
Visión 3D
Geometría Proyectiva I
40
18
Homografías entre Planos Proyectivos
Plano – Imagen
El Plano Π no pasa por el centro óptico C
Puntos en el plano:
~ ~
~=P
m
M = [P
~
p] M
⎡X ⎤
⎡ P11
⎢Y ⎥
~
~
⎢
⎥
Si M = λ
∈ ∏ ⇒ m ≅ ⎢⎢ P21
⎢0⎥
⎢⎣ P31
⎢⎣ 1 ⎥⎦
P12
P22
P32
P14 ⎤ ⎡ X ⎤
P24 ⎥⎥ ⎢⎢ Y ⎥⎥
P34 ⎥⎦ ⎢⎣ 1 ⎥⎦
~ ~
~=P
m
M = [P
~
p] M
⎡X ⎤
⎡ P11
⎢Y ⎥
~
~ ≅ ⎢P
Si M = λ ⎢ ⎥ ∈ ∏ ⇒ m
⎢ 21
⎢0⎥
⎣⎢ P31
⎢⎣ 1 ⎥⎦
P12
P22
P32
P14 ⎤ ⎡ X ⎤
P24 ⎥⎥ ⎢⎢ Y ⎥⎥
P34 ⎦⎥ ⎣⎢ 1 ⎦⎥
~
~
~≅H M
~
m
M Π ≅ H −13 x 3 m
3 x3
Π,
Cálculo de H: 4 puntos del plano proyectados en la imagen
⌧ no colineales tomados de tres en tres
INGENIERÍA DE SISTEMAS Y AUTOMÁTICA - UMH
Visión 3D
Geometría Proyectiva I
41
Homografías entre Planos Proyectivos
Permite:
Saber la proyección de cualquier
punto contenido en el plano (fuera
de los límites de la imagen)
Comprobar si un punto pertenece a
un plano
Conocer la posición 3D en el plano
a partir de la proyección en una
sola cámara (2D)
Rectificado: eliminar la distorsión
proyectiva en visión 2D
Fotogrametría:
INGENIERÍA DE SISTEMAS Y AUTOMÁTICA - UMH
Visión 3D
Geometría Proyectiva I
42
19
Homografías entre Planos Proyectivos
Plano en el infinito – Imagen
~ ~
~=P
• Punto proyectado m
M = [P
~ ⎡M ⎤
Si M = ⎢ ⎥ ∈ ∏ ∞
⎣0⎦
~
p] M
~=PM
⇒ m
~
⇒ M = P −1m
Proyecta intersecciones de líneas
paralelas en puntos de
desvanecimiento
INGENIERÍA DE SISTEMAS Y AUTOMÁTICA - UMH
Visión 3D
Geometría Proyectiva I
43
Homografías entre Planos Proyectivos
Plano Imagen – Plano de Imagen
El Plano Π no pasa por el centro óptico C
~
~
−1 ~
M Π , M Π ≅ H1 m
~
−1 ~
2 M Π = H 2 H1 m
~' ≅ H m
~
m
~≅H
m
1
~
m' ≅ H
Si es el plano en el infinito
~' ≅ H m
~ , H = P ' P −1
m
∞
∞
Aplicación:
⌧Mosaicos de escenas distantes
⌧Correspondencia de puntos en planos
INGENIERÍA DE SISTEMAS Y AUTOMÁTICA - UMH
Visión 3D
Geometría Proyectiva I
44
20
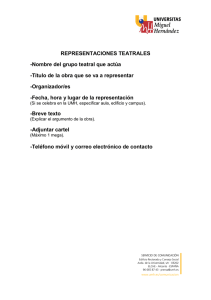
Homografías entre Planos Proyectivos
Cálculo de la Homogafía entre Puntos de un Plano:
Se hallan la proyección de puntos del plano
Se obtiene la matriz Hπ
Se puede emplear para hallar la correspondencia de cualquier punto del
plano
A
A
E
D
E
B
D
F
C
B
F
C
INGENIERÍA DE SISTEMAS Y AUTOMÁTICA - UMH
Visión 3D
Geometría Proyectiva I
45
21