EUITI-UPM
Dpto. Electrónica Automática
e Informática Industrial.
Título:
Sistema de mezcla con quemador
Trabajo de Control de Procesos: 1
CONTROL DE PROCESOS
2004-05
1. Descripción del sistema
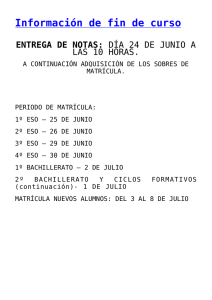
La figura representa un sistema mezclador de dos flujos de un fluido con dos
concentraciones y temperaturas distintas cada uno de ellos. El proceso de mezcla se
calienta mediante un quemador para conseguir la temperatura adecuada del flujo
demandado de salida.
T1 F1 X1
T 2 F2 X2
Ss
Seccion
T F X
Distancia
Sensores del
Flujo de salida
gas
P1
Sv
P2
Figura 1. Descripción del sistema
Enunciado de trabajo de curso
2
CONTROL DE PROCESOS
2004-05
2. Modelo del sistema
Variables del sistema
Los nombres de las variables del proceso, junto con su descripción aparecen en
la siguiente tabla. Se considera un soluto no volátil y agua como solvente.
Variable
F1
F2
F
X1
X2
T1
T2
T
P1
P2
H
Sv
Q
SS
Descripción
Flujo másico principal de alimentación
Flujo másico secundario de alimentación
Flujo másico de producto
Composición de alimentación principal
Composición de alimentación secundaria
Temperatura de alimentación principal
Temperatura de alimentación secundaria
Temperatura de producto
Presión de alimentación de gas calefactor
Presión de gas calefactor
Nivel de mezcla en el tanque
Sección efectiva de la válvula de gas calefactor
Potencia de calefacción
Sección efectiva de la válvula de salida
Ecuaciones del sistema
• Balance de masas total del proceso
El balance de masas total del proceso (solvente y soluto) es el siguiente:
ρ A dH/dt = F1 + F2 – F
(1)
F = ρ ⋅ A VS S S 2 gH
(2)
donde: ρ es la densidad del líquido
A es el área de la sección transversal del tanque
AVS es el area máxima efectiva de la válvula de salida.
g es la gravedad.
Ss es el porcentaje (0-1) de la sección efectiva respecto de la máxima de la
válvula de salida.
• Balance de masas de soluto en el proceso
El balance de masas de soluto del proceso es el siguiente:
Enunciado de trabajo de curso
3
CONTROL DE PROCESOS
2004-05
ρ A d(H X)/dt + F X = F1 X1 + F2 X2
(3)
Teniendo en cuenta que Xd es la composición de la mezcla en el depósito.
• Balance de energía del proceso
El balance energético dentro del tanque de mezcla con el quemador es el siguiente:
ρ A H cp dTd/dt = F1 cp (T1-Td) + F2 cp (T2 – Td) + Q
(4)
donde cp es el poder calorífico del líquido que se supone constante y Td es la
temperatura de la mezcla del depósito.
La cantidad de calor transferida a la mezcla por el quemador es:
Q = UA P2
(5)
donde UA es el coeficiente global de calor transmitido
La presión de gas en el quemador se obtiene mediante:
P2 = Kv P1 Sv
(6)
donde Kv es la constante de la válvula de regulación del gas del quemador
• Ecuaciones de transporte
Para modelar el transporte, se consideran despreciables los efectos dinámicos
debidos a la variación del caudal de F, por tanto:
dist ancia
ρ ⋅ Avs )
F (t )
dist ancia
X (t ) = X d (t −
ρ ⋅ Avs )
F (t )
T (t ) = Td (t −
(7)
(8)
• Valor de las constantes del proceso
Valor de los parámetros constantes de las ecuaciones:
ρ = 1000 kg/m3
Cp = 4.2 kJ/kg·ºC
UA = 3 kW/kPa
Kv = 1
A = formulaArea m2
Seccion de tuberia de salida = AVS = 0.005 m2
G = 9.8 m/s2.
Distancia a la válvula de salida=2 m.
Altura del depósito= 2 m
De cara a lograr que la dinámica sea distinta en cada trabajo se ha introducido un
tamaño de depósito variable en función del número de matrícula:
Enunciado de trabajo de curso
4
CONTROL DE PROCESOS
2004-05
Súmese los tres últimos dígitos del número de matrícula. El resultado
multiplicarlo por 0.1, y sumarle 0.1. Este será el valor del área del depósito para cada
trabajo.
E.g.: Número de matrícula: 45573
Area= (5+7+3)*0.1+0.1=1.6 m2
Número de matrícula: 46240
Area=(2+4+0)*0.1+0.1=0.7 m2
• Ecuaciones de los sensores y actuadores
•
Las electro-válvulas del sistema se supone que tiene una dinámica
despreciable respecto a los tiempos de respuesta del resto de las ecuaciones
del sistema. Dado que F1 y F2, reflejan la existencia de un control en
cascada, los límites impuestos de saturación por las válvulas quedan
reflejados respecto al flujo másico en que ambas variables nunca superarán
10kg/s, ni serán inferiores a 0 kg/s. En cuanto SS sus valores estarán
comprendidos entre 0 y 1, representando respectivamente 0%-100% de la
apertura máxima.
• Los sensores que se utilizan para la medición de la composición de los flujos
del sistema se pueden aproximar por un sistema de primer orden de
ganancia estática unitaria cuya constante de tiempo no puede despreciarse,
siendo del orden de la tercera parte de la constante de tiempo de variación
de la composición de salida respecto a los cambios en los flujos de entrada
del sistema.
Parámetros y punto de funcionamiento del sistema
Valor de las variables en el punto de funcionamiento elegido como óptimo (donde se
realizará la linealización):
•
•
•
•
•
•
•
•
•
•
•
•
•
•
F10= 8kg/s
F20= 2 kg/s
F0 = 10 kg/s
X10= 1.75
X20= 3
X0 = 2
T10= 60 ºC
T20= 45 ºC
T0 = 65ºC
P10= 160kPa
P20= 112 kPa
Sv0= 0.7
Q0= 336 kW
H0= formulaAltura m
Enunciado de trabajo de curso
5
CONTROL DE PROCESOS
2004-05
De nuevo se introduce un punto de funcionamiento variable en función del
número de matrícula:
La altura de trabajo se obtendrá mediante la suma de los cinco dígitos del
número de matrícula. Esta suma dividida por 10, dando lugar al número R.
La altura de trabajo se obtiene sumando a 0.6 la parte decimal de R.
E.g.:
Número de matrícula: 45573
R= (4+5+5+7+3)*0.1=2.4
Altura=(0.6+0.4) m=1.0 m.
Número de matrícula: 46240
R= (4+6+2+4+0)*0.1=1.6
Altura=(0.6+0.6) m=1.2 m.
Balance de grados de libertad del sistema
Las variables manipuladas del sistema son la apertura de las cuatro electro-válvulas
que aparecen en la figura, correspondientes a las variables F1, F2, Sv, y Ss. El resto de las
variables de entrada que aparezcan en el balance de grados de libertad del sistema
deben considerarse por tanto entradas de perturbaciones externas.
Las variables a controlar son la altura del depósito, y la temperatura, composición y
caudal del flujo de salida.
3. Objetivos de control
Se desea diseñar una estructura de control del sistema que cumpla los siguientes
objetivos generales de control:
1. Las variables de salida T, X y F deben responder con una buena dinámica
(i.e. de forma rápida y sin grandes oscilaciones) y con un buen valor en
régimen permanente, a los distintos cambios de referencia de dichas
variables y a cambios en de las perturbaciones y a inexactitudes del modelo
del sistema.
2. Ninguna de las variables del sistema debe sobrepasar unos valores máximos
y mínimos necesarios para el correcto funcionamiento del sistema
preestablecidos (flujo máximo que permiten las tuberías y válvulas, altura
máxima del depósito para que no rebose, altura mínima del depósito para
efectuar una adecuada mezcla, temperaturas o presiones máximas
tolerables, ... ) estas restricciones aparecen reflejadas a continuación:
Variable
P2
H
Td
Máximo
--90%altura del depósito
90º
Enunciado de trabajo de curso
Mínimo
20 kPa
20% altura del depósito
---
6
CONTROL DE PROCESOS
4.
2004-05
Documentación a entregar
Para la calificación de este ejercicio se debe entregar la siguiente documentación
acompañada de los programas que en ella se mencionan y desglosada en las partes
siguientes:
1. Modelos del sistema.
En esta primera parte se entregará la siguiente documentación:
1.1 Ecuaciones del modelo no lineal del sistema con los valores de todos los
parámetros. Determinación de las variables manipuladas y de perturbación del
sistema. Determinación del valor de todas las variables del sistema en el punto de
funcionamiento elegido. Dicho modelo se realizará considerando que no hay
transporte.
1.2 Implementación en Simulink del modelo anterior (fichero con dicho modelo e
impresión de este), así como del modelo no lineal incremental respecto del punto
de funcionamiento.
1.3 Obtención del modelo lineal del sistema alrededor del punto de funcionamiento
elegido y con los rangos de las variables determinados en el apartado 1.1. Dicho
modelo se obtendrá mediante identificación a partir de la implementación el
modelo no lineal en incrementos del apartado 1.2.
2. Estudio de estructuras de control.
Estudio de la adecuación al presente problema de cada una de las técnicas de
control estudiadas en la parte de Control Avanzado de la asignatura Regulación
Automática II. Este estudio incluye un análisis critico de la bondad de cada una de
las técnicas consideradas para el presente problema de control.
Para realizar dicho estudio correctamente, se deberá implementar en la mayoría de
los casos la técnica de control considerada, analizando la bondad de los resultados
obtenidos.
Concretamente:
2.1 Realización de lazos de control simple mediante PID considerando que no hay
transporte. Se realizará una comparativa entre la inclusión de anti-windup o no.
2.2 Realización de lazos de control simple mediante PID considerando que hay
transporte. Se adaptará lo realizado en 2.1 con la cancelación si se considera
necesaria del efecto del retardo puro. Se analizará el efecto que tendrá sobre el
sistema el hecho de que el retardo dependa del caudal de salida.
NOTA: Los siguientes apartados hasta el final del trabajo considerarán que no
existe retardo debido al transporte.
Enunciado de trabajo de curso
7
CONTROL DE PROCESOS
2004-05
2.3 Proponer la posibilidad o conveniencia de incluir algún control en cascada.
2.4 Proponer la posibilidad o conveniencia de incluir algún lazo anticipativo.
2.5 Proponer la posibilidad o conveniencia de incluir algún control proporcional.
2.6 Proponer la posibilidad o conveniencia de incluir algún control selectivo.
2.7 Proponer la posibilidad o conveniencia de realizar un control multivariable 2x2
de una parte del sistema. Usar tanto las reglas de McAvoy como el desacoplamiento parcial o total.
Se entregará un fichero en el que estén implementadas las distintas estructuras de
control analizadas. Se aconseja que dicho fichero sea un modelo de Simulink del
sistema incluyendo la estructura de control analizada (fichero .mdl).
3. Propuesta de una estructura completa de control
3.1 Obtener una estructura de control completa que incluya las estructuras
parciales de control analizadas en el apartado anterior y que se consideren
adecuadas para su utilización en el presente problema de control. Se entregará un
fichero en el que este implementada la estructura de control propuesta.
3.2 Análisis de los resultados obtenidos con la estructura conjunta propuesta ante
variaciones de las referencias y de las perturbaciones, analizando tanto el régimen
transitorio y como el permanente.
3.3 Análisis de los resultados obtenidos con la estructura conjunta propuesta ante
variaciones del 5% en los valores de los parámetros del sistema, analizando tanto el
régimen transitorio y como el permanente.
Nota: Se realizará de forma analítica el cálculo de todos los reguladores y del resto
de las funciones de transferencia asociadas a cada las estructuras de control
analizadas. Posteriormente se podrán ajustar dichos valores de forma empírica
mediante la comprobación de su funcionamiento en el sistema implementado.
Enunciado de trabajo de curso
8
 0
0