maxon sensor Tecnología – breve y conciso
Anuncio

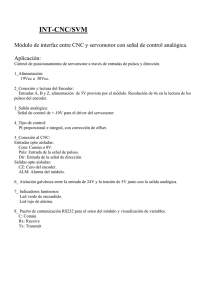
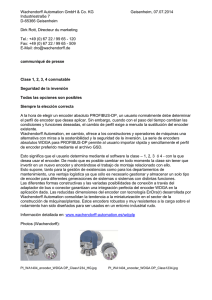
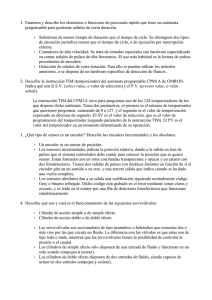
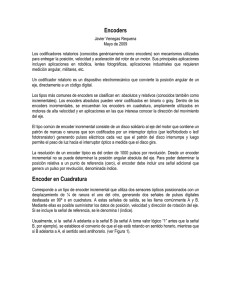
maxon sensor 9 8 Programa Sensores maxon ofrece una serie de sensores. Sus carac­ terísticas son: Encoder incremental digital – Señal de posición relativa apta para posicionamiento – Reconocimiento del sentido de giro – Información de velocidad por la frecuencia de los pulsos – Solución estándar para muchas aplicaciones – Encoder digital MILE – Encoder digital MR – Encoder digital Hall – Encoder digital óptico – Tacodinamo CC – Resolver Tacodinamo CC – Señal de velocidad analógica – Reconocimiento del sentido de giro – No apta para posicionamiento 1 Tapa 2 Conexiones eléctricas del motor y encoder 3 Circuito impreso 4 Sensor MR 5 ASIC 6 Rueda magnética multipolar 7 Cubierta del encoder 8 Conexiones del motor 9 Motor = Media materializata + Portador de la media materializata 9 7 3 4 6 + 53 1 = 8 Resolver – Posición del rotor analógica – Señal de velocidad analógica – Se requiere electrónica compleja en el sistema de control – Apto para soluciones especiales en conjunto con electrónicas de conmutación senoidal para motores EC Encoder Digital Incremental Señales del encoder Para el procesamiento ulterior en el sistema de control, los encoders transmiten señales de onda cuadrada, cuyos pulsos se cuentan para un posicionamiento exacto o para determinar la velocidad de giro real. El desfase entre las seña­ les de los canales A y B permite su comparación con el propósito de determinar el sentido de giro. Todos los sistemas de posicionamiento maxon detectan los frentes de subida y de bajada de la señal. Con respecto a la señal del encoder esto significa una precisión cuatro veces más alta. En este caso se habla de «quadcounts». El canal Index (Canal I) puede ser usado como punto de referencia para determinar con preci­ sión el ángulo de rotación recorrido. El line driver genera las señales complemen­ – – tarias de A, B e I, lo que permite eliminar las interferencias que se producen en cables de señal largos. También mejora la calidad de la trasmisión con flancos de señal más rápidos mediante la electrónica interna del encoder. 25 Principios magnéticos En los encoders magnéticos, un pequeño imán permanente multipolar se coloca en el eje del motor. Las modificaciones del flujo magnético son captadas por sensores y se transmiten ya tratadas como canal A y B a la electrónica. Los encoder magnéticos apenas necesitan espacio. Encoder MR – Sensor de principio magnetorresistivo – La interpolación hace posible una alta canti­ dad de pulsos – Número de pulsos seleccionable – Canal index seleccionable – line driver seleccionable MEnc – Sensores Hall digitales – 2 canales A y B – No es posible line driver – Bajo número de pulsos Principio óptico Según el principio óptico de la horquilla fotoeléc­ trica (ejemplo: HEDL, HEDS, Enc22), un LED envía la luz a través de la fina retícula de un disco generador de pulsos, fijado en el eje del motor. El receptor, (fototransistor) transforma los impulsos de luz en los correspondientes impul­ Consejos en la selección del encoder sos eléctricos que son posteriormente amplifica­ dos y procesados por la electrónica adecuada. Características – Mayor necesidad de espacio debido a la parte saliente – Alto número de pulsos – Posibilidad de canal índex y Line Driver (señal complementaria) – Precisión muy elevada Principio inductivo En el Encoder inductivo MILE, se induce un campo alternante de alta frecuencia que es modulado por un disco de cobre estructurado, en función del ángulo. Características – Muy robusto contra campos magnéticos y eléctricos así como contaminación – Permite alcanzar velocidades muy altas – Alta precisión. Los errores de interpolación son ampliamente compensados mediante una tabla de valores – Disponible canal index y line driver – Interfaz absoluto (SSI) bajo demand Las principales características de los encoders incrementales maxon son: – El número de pulsos por vuelta (incrementos) – La Precisión – Uso de un canal index – Uso de un line driver – Máxima velocidad admitida – Idóneo para ambientes con condiciones es­ peciales (polvo, aceite, campos magnéticos, ionización radiación) Encoders y controladores maxon – Los controladores maxon vienen preajustados para encoders de 500 impulsos por vuelta. – La frecuencia de entrada de la electrónica de regulación puede limitar el número máximo de pulsos del encoder. – Cuanto mayor sea el número de impulsos y la precisión, más suave y libre de tirones será el movimiento, incluso a bajas velocidades. – Los controladores maxon pueden utilizarse para funcionar a baja o alta velocidad, y con encoders de baja o alta resolución indistinta­ mente. Tacodinamo CC En principio, cualquier motor maxon CC puede ser utilizado como tacodinamo. Para las com­ binaciones motor-tacodinamo, proponemos un tacómetro CC montado directamente sobre el eje del motor. 1 Sistemas de posicionamiento, principios: – Cuanto más alto sea el número de pulsos más preciso será el posicionamiento. Con 500 pulsos, (2000 quadcounts) se consigue una precisión de 0.18° de vuelta de motor. Esta precisión es más alta que la de los compo­ nentes mecánicos del accionamiento (ej.: holgura de las reductoras o elasticidad de la correa). – En los controles de posición se deben usar sólo los encoders con controlador de línea RS422 (line driver). Así se evita que las inter­ ferencias electromagnéticas causen pérdida de la señal y acumulación de errores de posición. – En las aplicaciones de posicionamiento a menudo se requiere el canal index del enco­ der como punto de referencia. Características – La tensión continua que entrega es proporcio­ nal a la velocidad gracias a las escobillas de metal precioso – Los imanes de AlNiCo presentan una gran estabilidad con los cambios de temperatura – Sin rodamientos adicionales para la tacodina­ mo, sin fricción ni acoplamientos – Sin acoplamientos, alta frecuencia de resonancia mecánica Resolver El resolver se monta en el eje del motor y es alineado con el campo magnético del rotor del motor. El resolver tiene una bobina primaria giratoria (rotor) y dos bobinados secundarios desfasados 90º (estator). Una tensión variable del bobinado primario es transmitida a los bobinados secundarios. Las amplitudes de las tensiones secundarias son sen j y cos j, donde j es el ángulo de rotación. Características – Robusto, para uso industrial – Larga vida útil – Sin desgaste mecánico – Las señales de salida pueden ser transmitidas largas distancias sin problemas – Sin electrónicas sensibles – Se requiere un proceso de la señal especial – Un sólo sensor para obtener la información de velocidad y posición – Los motores EC (brushless) con resolver se suministran sin sensores Hall 90° e 360° e Desfase A,B Ciclo A B I Velocidad muy baja Canale B Canale I Anchura de pulso index S cos ✓ ✓ arctan ✓ ✓ ✓ A/D Disponible con canal index ✓ ✓ ✓ LUT Diseño compacto N (✓) (✓) ✓ Resistente a campos magnéticos externos S Desfase de pulso index ionización radiación Edición de julio de 2012 / Sujeto a modificaciones ✓ Disponible con Line driver Polvo, suciedad, aceite Edición de julio de 2012 / Sujeto a modificaciones Estructura simplificada de un resolver ✓ Posicionamiento de precisión sin N Tecnología – breve y conciso ✓ (✓) Velocidad muy alta Canale A 32 (✓) bajo determinadas circunstancias *previo encargo MILE Esquema de la estructura del encoder inductivo MILE Diseño esquemático de un encoder optoelectrónico óptico Diseño esquemático de un encoder magnético MR Recomendaciones para la elección de encoder Representación de la señal de salida de un encoder digital MEnc maxon sensor maxon sensor Tecnología – breve y conciso ✓ ✓ ✓ ✓ ✓ ✓* Tecnología – breve y conciso 33