Capítulo 3: Control digital
Anuncio

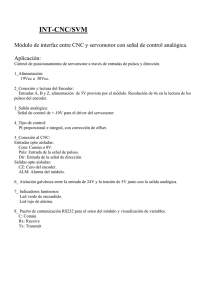
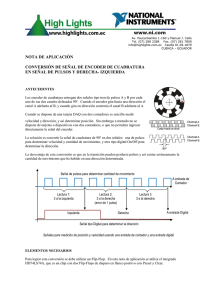
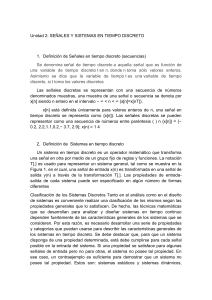
Capítulo 3: Control digital Capítulo 3: Control digital 3.1. Introducción El control digital de procesos presenta un problema muy claramente definido: la discretización. Mientras que el proceso que se trata de controlar es un sistema continuo, el controlador digital está discretizado en su propia constitución. Esta discretización obliga a diseñar los controladores con una perspectiva diferente. Los controladores digitales obligan a incluir elementos de acoplamiento y sincronización, que no son propios del control en sí mismo, pero que influyen en él y deben ser tenidos en cuenta. 3.1.1. Sensores La función de los sensores es la obtención de datos para el proceso. Los encoders aquí utilizados introducen ya una primera discretización, ya que por su propia manufactura alcanzan una resolución bien definida. 3.1.2. Actuadores El actuador se encarga de transmitir la señal de alimentación al motor. Un servo amplificador se encarga de realizar una correcta transmisión de la señal mediante una modulación por anchura de pulsos. La constante de tiempo eléctrica del actuador es despreciable frente a la constante de tiempo mecánica del sistema. 19 3.1. Introducción Ilustración 3.1. Control digital 3.1.3. Computador Todas las señales de entrada y salida de un computador son digitales, por lo que se necesitan convertidores digital-analógico y analógico-digital para operar con señales analógicas. 3.2. Modelo discreto Las señales con las que se trabaja son digitales y, además de estar discretizadas en el tiempo, los posibles valores que pueden tomar se encuentran también discretizados. Así, en cada periodo de muestreo se recibe una señal del encoder que determina dónde se encuentra situada la carga. Esta señal es tratada informáticamente para calcular la señal de actuación óptima, que es enviada antes del final del periodo de muestreo, para volver a repetir el proceso. Desde el punto de vista de la planta que hay que controlar, todo es un sistema continuo. Se suministra un par y la planta responde girando un ángulo. Desde el punto de vista del controlador digital, la planta se comporta como un sistema en tiempo discreto, y por tanto el modelo de la planta debe realizarse atendiendo a esa 20 Capítulo 3: Control digital discretización. De esta forma, se utilizará la transformada Z para trabajar con el sistema en tiempo discreto. 3.3. Tiempo discreto y valores discretos Como ya se ha comentado antes, la señal del encoder está doblemente discretizada. Es obtenida periódicamente y, por tanto, está discretizada en el tiempo. Pero además, la señal del encoder que informa sobre la posición de la carga, sólo puede adquirir ciertos valores dados por su resolución. El encoder de la carga tiene una resolución de 10000 pulsos por vuelta. Además cuenta con dos discos desfasados 90º para determinar el sentido de giro, con lo que se obtienen 4 estados posibles (los cuatro cuadrantes de 90º) por cada pulso. 360º / vuelta =0.009 º / pulso 4 ·10000 pulsos/ vuelta Ilustración 3.2. Resolución del encoder incremental de la carga 21 3.3. Tiempo discreto y valores discretos 22